汽车倒车测距仪原理及电路分析
汽车倒车测距仪

题目:汽车倒车测距仪目录1、课程设计目的及内容要求----------------32、设计思路及原理----------------------------33、电路设计原理图----------------------------44、程序清单及流程图-------------------------95、问题分析及解决方法----------------------146、心得体会-------------------------------------15一、设计内容及要求1、设计一个微机控制的汽车倒车测距仪,能测量并显示车辆后部障碍物离车辆的距离,同时用间歇的“嘟嘟”声发出警报,“嘟嘟”声间隙随障碍物距离缩短而缩短,驾驶员不但可以直接观察到检测的距离,还可以凭听觉判断车后障碍物离车辆距离的远近;①开机后先显示“———”,并有开机指示灯。
②CPU发射超声波1ms,然后显示60ms;即1ms+60ms为一个工作周期,等待回波,在次周期内完成一次探测。
③根据距离远近发出报警声并显示距离。
障碍物距离小于1m,距离值变化5cm更换显示,否则不更换;距离在1m以上,新值与原显示值之差大于10cm更换,否则不更换。
④用三LED位数码管显示障碍物距离2、硬件电路原理图和软件框图;3 编写控制程序,写出设计任务书(总结报告)。
4设计任务:(1)、选用8088和适当的存储器及接口芯片完成相应的功能。
(2)、用LED显示器显示电子锁的当前状态。
(3)、画出详细的硬件连接图。
(4)、给出程序设计思路、画出软件流程图。
(5)、给出地址分配表。
(6)、给出所有程序清单并加上必要注释。
(7)、完成设计说明书(列出参考文献,所用器件型号)。
二、设计原理超声波测距原理:利用发射超声波的装置向着某一方向发射一束超声波,再利用计时器计算超声波发出以及遇到障碍物反射回来的时间差来测量距离。
由声音在空气中的传播速度v=340m/s及匀速运动位移关系式:s=vt可计得声音往返距离s,则s/2就是单程距离。
-汽车倒车测距仪
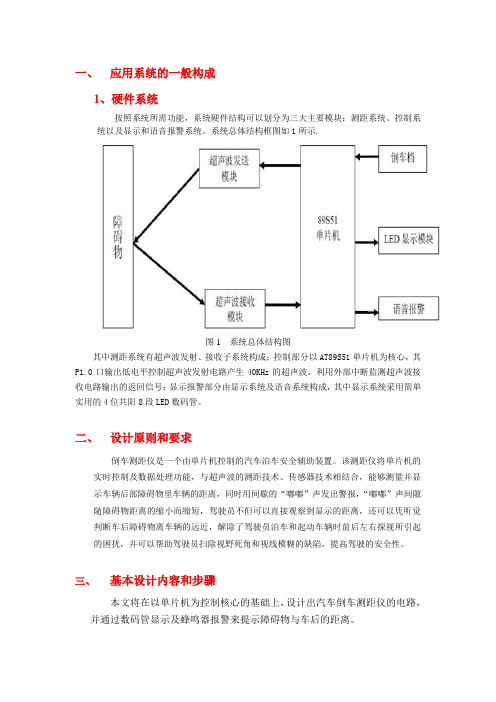
一、应用系统的一般构成1、硬件系统按照系统所需功能,系统硬件结构可以划分为三大主要模块:测距系统、控制系统以及显示和语音报警系统。
系统总体结构框图如1所示.图1 系统总体结构图其中测距系统有超声波发射、接收子系统构成;控制部分以AT89S51单片机为核心,其P1.0口输出低电平控制超声波发射电路产生40KHz的超声波,利用外部中断监测超声波接收电路输出的返回信号;显示报警部分由显示系统及语音系统构成,其中显示系统采用简单实用的4位共阳8段LED数码管。
二、设计原则和要求倒车测距仪是一个由单片机控制的汽车泊车安全辅助装置。
该测距仪将单片机的实时控制及数据处理功能,与超声波的测距技术、传感器技术相结合,能够测量并显示车辆后部障碍物里车辆的距离,同时用间歇的“嘟嘟”声发出警报,“嘟嘟”声间隙随障碍物距离的缩小而缩短,驾驶员不但可以直接观察到显示的距离,还可以凭听觉判断车后障碍物离车辆的远近,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并可以帮助驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶的安全性。
三、基本设计内容和步骤本文将在以单片机为控制核心的基础上,设计出汽车倒车测距仪的电路,并通过数码管显示及蜂鸣器报警来提示障碍物与车后的距离。
分别完成单片机控制电路设计、数码管显示电路设计、蜂鸣器报警电路设计、按键控制电路设计及超声波测距模块的安装与调试等。
软件设计中,通过汇编语言编写程序,完成单片机对外围芯片的驱动与控制,从而完成整个汽车倒车测距仪的功能实现。
四、硬件和软件的具体设计1、系统硬件的具体设计(1)单片机控制电路设计采用AT89S51作为系统控制器。
它是美国ATMEL公司生产的低功耗、高性能CMOS 8位单片机,器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准8051指令系统及引脚。
它集Flash程序存储器既可在线编程,也可用传统方法进行编程。
AT89S51提供以下标准功能:4k字节Flash闪速存储器,128字节内部RAM,32个I/O口线,看门狗,2个数据指针,2个16位定时/计数器,一个5向量两级中断结构,一个全双工串行通信口,单片机振荡器及时钟电路。
汽车测速及倒车提示产品介绍及电路原理
汽车测速及倒车提示产品介绍及电路原理一、微动按钮功能K5,复位键:按一下,电路复位,电路处于待机状态。
K4,正转键:按一下,电机MG1正转。
K3,加速键:正转时,按一下,电机MG1加速。
K2,减速键:正转时,按一下,电机MG1减速。
K1,倒车键:按一下,电机MG1反转。
二、产品功能介绍1.电路正确连接后,接通电源,按一下微动按钮K5,数码显示管DS1显示0000。
2.按一下微动按钮K4,电机MG1转动并带动转盘(遮断器)转动,数码显示管DS1显示数字,再按一下K4,电机MG1停转,电路复位。
3.在按一下微动按钮K4后,按一下微动按钮K3,电机MG1转动加快并带动转盘(遮断器)转动,数码显示管DS1显示数字,此时显示的数字增大。
可按微动按钮K3三次(三档),第四次按动K3时,电机MG1停转,电路复位。
4.在按一下微动按钮K4后,按一下微动按钮K2,电机MG1转速减慢并带动转盘(遮断器)转动减慢,数码显示管DS1显示数字减少。
再按一下微动按钮K2,电机MG1停转,电路复位。
5.按一下微动按钮K1,电机MG1倒转并带动转盘(遮断器)转动,此时为汽车倒车。
用障碍物放在离开超声接收器LS1和超声发生器LS2一定距离的位置上,数码显示管DS1显示数字,此时显示的数字为障碍物与LS1和LS2的距离(相当于汽车与障碍物的距离,单位为厘米),如果障碍物距离变动,数码显示管DS1显示数字也随之变化。
当距离等于20厘米时,电机MG1自动停转。
或在大于20厘米时再按一下微动按钮K1,电机MG1停转,电路复位。
三、电路原理该产品是由下面几部分电路组成:超声波发射电路、超声波接收电路、提示音发生器、直流电机控制电路、转速检测电路、单片机电路、显示电路和电源电路。
汽车测速及倒车提示功能及电路原理第 3 页共 3 页。
(0601)基于单片机汽车倒车测距仪的设计2

本科毕业设计(论文)题目基于单片机的汽车倒车测距仪院(系部)机械与动力工程系专业名称测控技术与精密仪器年级班级08测控一班学生姓名张乐乐指导教师张明军2012年06月01日摘要本文利用超声波传输中距离与时间的关系,采用C8051F单片机进行控制及数据处理,设计出了能精确测量点间距离的超声波测距仪,利用所设计出的汽车倒车测距仪,能比较精确测量车后障碍物距离。
在分析国内外单片机汽车倒车测距仪相关技术的基础上,结合最新研究成果,对基于超声波测距的倒车测距系统的研制进行了深入探讨和研究。
该系统分为测距模块、系统控制模块和显示报警模块,并分别对其进行方案分析,构建了单片机汽车倒车测距仪构架和设计方案,在硬件电路中,详细阐述了运用单片机技术实现的可视倒车预警系统的测距实现原理,分析了以单片机为主控单元的系统硬件和软件设计,并对该系统进行了试验和误差分析,给出了本系统的稳定性指标。
关键词:C8051F单片机,超声波,LED,收发电路AbstractIn this paper, using the relation of the ultrasonic transmission distance and time by C8051F MCU controlling and data processing design capacity points that can accurately measure the distance between the ultrasonic range finder, using the design of car parking ranger, can more accurately measure the distance between the obstacle and vehicle.SCM car parking on the analysis on the basis of rangefinders related technologies, combined with the latest research results, Based on Ultrasonic Ranging System reversing conducted in-depth study and research. The system is divided into distance module, alarm system control module and display module, with respect to their program analysis, construction of the single chip architecture and design of car parking ranger program; in the hardware circuit, described in detail the use of microcomputer technology to achieve Distance visual reversing warning system implementation principle, analysis based on single chip main control unit of the system hardware and software design, and tested the system and error analysis, Given the stability of the system indicators.Key words:C8051F MCU Ultrasound, LED, Transceiver Circuit目录摘要 (1)Abstract (2)第一章绪论 (5)第二章超声波的介绍 (7)2.1超声波的发展史 (7)2.1.1超声波的含义 (7)2.1.2国际方面 (7)2.1.3国内方面 (7)2.2超声波的特点 (8)2.3超声效应 (8)2.4超声波的应用 (10)第三章单片机的介绍 (12)3.1单片机的定义 (12)3.2单片机的发展过程 (12)3.3单片机的特点 (13)3.4单片机的应用 (13)3.5 C8051F单片机的介绍 (14)3.5.1系统概述 (14)3.5.2C8051F的特点 (15)3.5.3C8051F单片机增加的功能 (15)3.5.4C8051F单片机的引脚图 (17)3.5.5C8051F单片机引脚和封装定义 (18)第四章汽车倒车测距仪的硬件设计 (20)4.1设计的思路 (20)4.2设计的重点与难点 (20)4.3硬件设计的基本原理及原理图 (21)4.3.1超声波发生器 (21)4.3.2压电式超声波发生器 (21)4.3.3超声波发射器基本原理 (22)4.3.4电路原理图 (23)第五章超声波汽车倒车测距仪软件设计 (27)5.1主程序编制及流程图 (27)5.1.1编制要点及流程图 (27)5.1.2主程序的编制 (29)5.2中断服务程序的流程图及编制 (31)5.3显示距离子程序和延时子程序 (32)5.4信号处理程序 (33)5.4.1信号处理程序的编制要点 (33)5.4.2信号处理程序流程图 (35)5.4.3信号处理程序 (35)5.5程序中有关存储器,寄存器及标志位的内容及用途 (37)总结 (38)致谢 (39)参考文献 (40)附录 (40)整体设计框图 (41)硬件连接图 (41)第一章绪论汽车倒车测距仪能测量并显示车辆后部障碍物离车辆的距离,同时用间歇嘟嘟声报警,间歇时间随障碍物距离缩短而缩短。
汽车倒车雷达探测器的工作原理
汽车倒车雷达探测器的工作原理汽车倒车雷达探测器是一种常见的汽车安全辅助设备,它可以有效地帮助驾驶员在倒车时避免发生碰撞事故。
本文将详细介绍汽车倒车雷达探测器的工作原理。
一、工作原理概述汽车倒车雷达探测器通过使用超声波来实现对周围环境的探测。
它通常由多个传感器、控制模块和报警装置组成。
当车辆倒车时,传感器会发射超声波信号,并接收回波。
通过分析回波信号的时间和强度,控制模块可以准确计算车辆与障碍物之间的距离,并及时向驾驶员发出警报。
二、传感器汽车倒车雷达探测器的传感器通常安装在车辆的后保险杠上。
它们使用超声波传感器来发射和接收声波。
波束从传感器发送出去并与周围物体相交。
当声波遇到障碍物时会发生反射,返回传感器并被接收。
传感器测量声波离开和返回之间的时间差,并将这个时间差转换成距离。
三、控制模块控制模块负责接收传感器发送的信号和计算车辆与障碍物之间的距离。
当传感器接收到回波信号后,它们会将信号发送给控制模块。
控制模块使用声波的时间差来计算距离,并将结果显示在车辆内部的相关显示屏上。
四、报警装置报警装置是汽车倒车雷达探测器的重要组成部分。
当控制模块检测到距离障碍物过近时,它会向报警装置发送指令,以触发声音或光线等警报。
这样可以提醒驾驶员注意周围情况,避免发生碰撞事故。
五、工作原理详解汽车倒车雷达探测器的工作原理是基于声波的传播速度和回波时间的计算。
声波在空气中传播的速度大约为343米/秒,当声波遇到障碍物时会发生反射,返回传感器。
通过测量声波离开和返回之间的时间差,可以计算出障碍物与车辆之间的距离。
汽车倒车雷达探测器通常使用多个传感器进行环形布置,以实现360度的全方位探测。
每个传感器依次发射声波,并接收返回的回波。
控制模块通过比较不同传感器之间的时间差,可以计算出障碍物与车辆之间的具体位置和距离。
当控制模块计算出距离后,它会将结果显示在与控制模块连接的显示屏上。
驾驶员可以根据显示屏上的信息来判断障碍物的距离,从而采取相应的措施。
红外倒车雷达电路的工作原理

红外倒车雷达电路的工作原理一、红外倒车雷达的概述红外倒车雷达是一种借助红外线探测距离的安全辅助装置,常用于汽车倒车时的安全提示。
其主要工作原理是通过探测器发射红外线,当红外线遇到障碍物时,会被反射回来,被接收器接收并进行处理,最终将结果反馈给驾驶员。
二、红外线的物理特性1. 红外线的波长和频率红外线是指波长在0.76微米至1000微米之间的电磁辐射。
其频率范围为300GHz至400THz。
2. 红外线与物体的相互作用当红外线照射到物体上时,部分能量会被吸收、反射或透过物体。
不同材料对于不同波长和频率的红外线有着不同的吸收和反射特性。
3. 红外光源和探测器为了产生和接收红外线信号,需要使用专门的光源和探测器。
常用的光源包括发光二极管(LED)、激光二极管等;常用的探测器包括红外线接收二极管(IRD)、热电偶等。
三、红外倒车雷达电路的组成1. 发射电路发射电路是红外倒车雷达的核心部分,其主要作用是产生红外线信号。
发射电路一般由振荡器、放大器和发光二极管组成。
振荡器产生高频信号,经过放大器放大后,驱动发光二极管产生红外线信号。
2. 接收电路接收电路主要负责接收反射回来的红外线信号,并进行放大和处理。
接收电路一般由接收二极管、前置放大器、滤波器和比较器等组成。
接收二极管负责将反射回来的红外线转化为电信号,经过前置放大器和滤波器后,将信号输入比较器进行比较处理。
3. 控制电路控制电路主要负责控制发射和接收电路的工作状态,并对比较结果进行逻辑判断。
控制电路一般由微控制器、时钟、存储器等组成。
微控制器负责整个系统的协调和管理,时钟提供精确的时间基准,存储器存储程序和数据。
四、红外倒车雷达电路的工作原理1. 发射信号当驾驶员倒车时,控制电路会向发射电路发出指令,使其产生红外线信号。
发射电路将信号通过发光二极管发送出去。
2. 接收信号当红外线遇到障碍物时,会被反射回来,并被接收二极管转化为电信号。
接收电路对反射回来的信号进行放大和滤波处理,然后将处理后的信号输入比较器。
汽车倒车测距仪原理及电路分析

汽车倒车测距仪原理及电路分析汽车倒车测距仪能测量并显示车辆后部的障碍物离车辆的距离,同时可根据报警“嘟嘟”声的间隙来判断距离的远近。
主要技术指标:最大探测距离5m;测距相对误差〈士5%;工作环境:-10~55C。
雨、雪、雾及黑夜均不受影响。
汽车倒车测距仪电路图a为汽车倒车测距仪电路原理图。
IC1、IC2、IC3组成单片机的最小系统。
IC3为CPU芯片,IC1为接口电路,IC2为EPROM,内存汽车倒车测距工作程序。
仪器有3位LED数码管显示距离,小数点固定在第一位数字后.显示单位为米。
IC3的P1 口输出7段显示信号,低电平有效。
IC3第10~12脚为数显控制端,低电平有效。
数显系统采用扫描显示。
IC3第14脚为发射电路控制端,卨电平有效。
汽车倒车测距仪电路图b为40kHz超声波发射电路,IC4为2输人端4与非门,其中两个门组成多谐振荡器.调冇RP1可调节其振荡频率。
IC3第13脚为接收信号输人端,低电平有效。
汽车倒车测距仪电路图c为音频报警电路。
汽车倒车测距仪电路图d为反射信号接收电路,第二级放大器反馈回路采用LC并联谐振,以提高整机抗干扰性能.U采用收录机陷波线圈,调谐在40kHZ频率上。
放大后的反射信号,经VD2、C12整流滤波后输入IC6第4只运放进行电压比较.调节R17,即能调节整机接收距离。
当信号有效时,VT5管输出一个低电平脉冲。
系统软件根据发射信号和接收信号之间的时间差计算并转换成距离信号予以显示报警。
IC3第15脚为报警信号控制端,髙电平有效。
图3-10(c)为音频报警电路,IC4另两个门组成音频振荡器,振荡频率约800HZ,由C3耦合至IC5 (LM386)音频放大后驱动扬声器发出“嘟嘟”间隙报警声。
当探测到车后有障碍物时,即IC3第13脚有低电平信号输入时,系统软件根据障碍物距离远近输出不同频率的控制方波,距离远方波频率低,嘟声间隙时间长;距离近,方波频率髙,嘟声间隙时间短。
汽车倒车测距仪
石家庄铁道大学毕业设计汽车倒车测距仪的设计与实现The Design of Auto Reverse Rangefinder完成日期 2012 年 05 月 25 日毕业设计成绩单毕业设计任务书题目汽车倒车测距仪设计和实现一、主要内容单片机STC89系列利用超声波测距模块对障碍物距离检测,对超过阈值的距离报警动作。
二、基本要求1.单片机完成超声波测距。
2.实现根据不同的距离信息进行不同样式的报警。
3.使用Keil C编程,实现相关逻辑控制。
4.电路原理图设计,Protel印刷电路图设计。
5.提出系统设计框图,提出相应的解决方案。
三、主要技术指标(或研究方法)1.电压直流5V,工作电流小于500mA。
2.完成主要功能。
3.电路原理图。
4.使用说明书撰写。
四、应收集的资料及参考文献C语言开发。
关于STC89系列相关单片机开发文档。
相关传感和显示器件使用手册和接口电路。
五、进度计划第1周:开题,并完成开题报告。
第2-8 周:资料收集,文献阅读,系统设计,电路实现,程序仿真。
第9-14周:系统综合调试完成,撰写设计说明书。
第15-16周:准备参加答辩。
教研室主任签字时间年月日毕业设计开题报告题目汽车倒车测距仪设计和实现一、背景和意义安全是围绕汽车的永恒主题。
随着公路交通特别是高速公路交通的飞速发展,交通事故特别是恶性交通事故呈不断上升趋势,交通安全越来越受到广泛关注,因此世界各国在研究只能车辆自主导航技术的同时,投入大量的人力物力,致力于提高汽车行驶安全性。
随着我国经济飞速发展,越来越多的人拥有了自己的汽车,同时由泊车和倒车所引发的事故也越来越多。
因此,有助于驾驶员泊车和倒车的倒车倒车测距仪应运而生。
二、课题研究内容单片机STC89系列利用超声波测距模块对障碍物距离检测。
对超过阈值的距离报警动作。
三、课题预期目的本研究包括超声波发射和接受、液晶显示和语音播报等模块,在倒车时,汽车在智能控制器的控制下,由车尾部的超声波发生器探头发送超声波信号,当遇到障碍物时,产生回波信号,探头接受到回波信号后井控制器进行数据处理并计算出车体与障碍物之间的实际距离,然后通过显示或语音设备提示给驾驶员。
浅析汽车倒车防撞系统超声波测距电路

0 引言目前,汽车车辆测距方法主要有:超声波测距、激光测距、雷达测距等三种。
采用超声波测距电路电子技术具有测距精确、灵敏度高、成本低、易于做到实时控制等优点,在汽车倒车预警测距电器装置中得到了广泛的应用。
汽车超声波测距电子电路技术,主要是解决汽车行驶的安全距离问题,超过安全距离,超声波测距防碰撞系统立即报警以至自动采取减速措施,使车辆处于安全状态。
1 汽车超声波测距工作原理汽车超声波测距的声波频率一般为40 kHz。
如图1所示,汽车超声波倒车报警系统装置。
系统有四个超声波传感器,均匀安装在汽车后保险杠上未喷漆的部位内。
超声波传感器既是执行元件又是传感器,既可发射信号,也可接收信号。
如图2所示,超声波传感器由一个无线电收发机和一个整理器构成(见图3),整理器将回波信号转换成数字信号传递给控制单元。
简单的工作过程是:当挂上倒挡时,超声波倒车测距系统即开始工作,发出“嘟嘟”的声音,表明该系统状态良好;当车与障碍物相距约1.6 m 时,听见间歇警报声。
离障碍物越近,声音越急促,距离小于约0.2 m 时,连续发出警报声。
回波信号被转换成数字信号,并将其传递到控制单元,控制单元根据回波的传播时间计算出与障碍物的距离,即:s=340 t/2(超声波常温下在空气中的传播速度为340 m/s)。
图1图2 超声波传感器结构图3 整理器构成2 超声波测距电路分析超声波测距电路由超声波发射电路、接收放大电路、倍压检波电路和实时监控电路四个部分组成,下面详细分析各组成电路的工作过程。
2.1 超声波发射电路超声波发射电路见图4,是555IC1定时器产生40 kHz 超声波的信号电路原理图。
电路中电阻R1、R2、电位器RP1和电容C2是外接定时元件,决定输出矩形脉冲的振荡频率和周期。
电路工作过程:按下电源按钮开关SA1后,作者简介:朱伟文(1972-),男,广东河源人,本科,中级,维修电工高级技师,研究方向:汽车电子电气。
浅析汽车倒车防撞系统超声波测距电路朱伟文(广州市交通运输职业学校,广州 510440)摘 要:本文从汽车超声波测距基本原理开始,运用电路分析的方法,剖析超声波测距电子电路原理、组成、元件功能和工作过程;并以汽车超声波测距系统控制电子电路的实例(LM1812超声波控制电路),详细阐述了日产汽车倒车防撞报警系统超声波测距电路工作过程,希望能够为相关初学者和工作者提供借鉴。
数字超声波倒车测距仪设计-毕业设计
数字超声波倒车测距仪设计学生:XX 指导教师:XX内容摘要:在实时检测和自动控制的单片机应用系统中,单片机往往是作为一个核心部件来使用。
单片机是把主要计算机功能部件都集成在一块芯片上的微型计算机。
它是一种集计数和多中接口于一体的微控制器。
而52单片机是个单片机中最为典型和最有代表性的一种。
本设计主要应用AT89C52作为控制核心,与显示器,驱动电路等相结合的系统。
基于单片机设计。
利用单片机AT89C52作为报警装置的控制器,能充分发挥AT89C52的数据处理和实时控制功能而设计的数字超声波倒车测距仪。
使系统工作于最佳状态,提高系统的灵敏度。
其优点是体积小、使用方便、硬件电路简单,软件功能完善,控制系统可靠,具有一定的使用和参考价值。
若将安全距离设为0.5m,就可作为汽车倒车报警器,提高汽车倒车时的安全性。
该数字超声波倒车测距仪利用超声波实现对汽车的测距。
利用单片机的实时控制和数据处理功能完成系统的控制。
文章给出了测距仪的硬件电路原理及软件设计。
关键词:AT89C52 超声波测距仪The design of Digital ultrasonic Reverse rangefinder Abstract:In the application system of single-chip microcomputer of real-time detection and automatic control, the single-chip microcomputer always be used as a core components. The single-chip microcomputer is a microcomputer which collect all the important computer components to a chip.It is a kind of micro controller which contains count and varieties of interface. However, the 52 single-chip is the most typical and representative one of all the single-chip.This design is mainly taking AT89C52 as the control core, it is a system of connecting monitor, drive circuit etc. According to the design of the single-chip, using AT89C52 as the controller of alarm device will fully develop the function of data processing and real-time control of AT89C52. This kind of single-chip ensures the best condition and arises the sensitivity of the system. The merit of this single-chip is the small volume, convenience, simple hardware circuit, perfect software functions, the Control system is reliable,as well as the value of using and reference. If the safety distance is 0.5m, the single-chip may be setted as the reverse alarm and the safety will be improved. This digital ultrasonic reverse rangefinder uses ultrasonics to finish the test of the distance of vehicles. Completing the control of the system with real-time detection and the function of data processing. This essay is mainly talking about the hardware circuit principle and the software design of rangefinder.Keywords: AT89C52 ultrasonic rangefind目录前言 (1)1 数字超声波倒车测距仪介绍 (1)1.1 数字超声波倒车测距仪功能分析 (1)1.1.1 数字超声波倒车测距仪的基本功能 (1)1.2.1 AT89C52的硬件结构图 (2)1.2.2 AT89C52各部分的作用与工作原理 (3)2 系统硬件电路设计 (6)2.1 单片机的最小系统 (6)2.2 时钟电路 (6)2.3 复位电路 (7)2.4 多谐振荡器 (7)2.5 超声波传感器 (8)2.6 超声波接收电路 (9)2.7 放大电路及参数设定 (9)2.8 电压比较电路及参数设计 (10)2.9 AT89C52和LCD显示器模块的硬件接口 (11)3 系统软件设计 (14)3.1 超声波接收发射软件设计 (14)3.1.1 距离计算问题 (14)3.1.2 串扰问题 (14)3.1.3程序流程图 (15)3.2 LCD液晶显示器软件设计 (16)3.2.1 读/写时序 (17)4 结束语 (18)附录: (18)参考文献: (25)数字超声波倒车测距仪设计前言人们能听到声音是由于物体振动产生的,它的频率在20HZ-20KHZ范围内,超过20KHz称为超声波,低于20Hz的称为次声波。
基于单片机的汽车倒车测距系统硬件电路的设计

Mi c r o c o n t r o l l e r - b a s e d c a r r e v e r s i n g r a ng i n g s y s t e m h a r d wa r e c i r c u i t de s i g n
C HE N X i n g — 和. Z HA NG
第 4 0卷 第 1 1期 ・ 学 术
V 0I . 40 N OV 11
湖
南
农
机
2O1 3年 1 1 月
NOV. 201 3
HUNAN AGRl CUL TURAL M ACHI NERY
基于单片机 的汽车倒车测距系统硬件电路的设计
陈兴 付 , 张 琦
( 德 州学 院 汽 车 工程学 院 , 山东 德 州 2 5 3 0 2 3 )
到接收所需 要的时间。
I h
— — — — — — — — — — 一
v t
— — —
+J
l
超声波 发 舭 \
\
s
\
障碍物
子测 量技术应 用越来越广泛 , 而超 声波测量 精确高 , 成本低 , 性能稳定则备受青睐 。 超声测距是一种非接触检测技术 , 不受 光线 、 被测对象颜色等 的影 响 , 因此在汽车倒车雷达 的研制方
Ke y wo r d s : Re v e r s i n g r a n g i n g s y s t e m; S C M; h a r d wa r e c i r c u i t
1 引言
超声波是指频 率在 2 0 k H z以上 的声波 ,它属于机械波的 范畴。超 声波指 向性强 , 能量消耗缓慢 , 在介质 中传播 的距离 较远 , 因此超声波通常被用 于距离 的测量 。随着经济发展 , 电
红外线倒车雷达

《电子系统设计与实践》课程设计报告院:电气与信息工程学院号: 名: 指导教师:2017一.设计目标了解红外线倒车雷达的工作原理。
5.学会用Multisim 软件仿真电路。
二.项目介绍本红外线倒车雷达测距具有电路结构简单、成本低、电路工作稳定的特点,广泛应用于各种测距场合。
红外线倒车雷达电路由多谐振荡器电路、红外线发射与接收电路、信号放大与电压比较电路和发光管显示 电路组成。
电路使用红外发射管和红外接收管作为传感器件,电路的核心元件包括NE555构成多谐振振荡电路发射红外波信号,LM324主要用来放大红外接收信号和构成电压比较器电路,光二极管用来指示倒车距离范围。
三.电路原理简要分析NE555 及外围元件组成多谐振荡器电路,产生驱动红外线发射管工作的震荡电压,驱动发射管发射岀 红外线信号。
红外线被物体反射回来后,由红外线接收管接收并送人 信号经U2的第一脚输岀,经 C3耦合、D1和C2整流滤波后送至 U2的三个比较器的反相输入端,分别与三 个比较器的同相输入端的电压进行比较,当反相输入端的电压高于同相输入端的电压时,该比较器输岀低 电平,使与其连接的发光二极管点亮。
由发光二极管点亮的个数来指示距离的远近。
题目红外线倒车雷达级:电子Z1412. 学会识读红外线倒车雷达电路原理图、安装图。
3. 掌握红外线倒车雷达电路安装及焊接。
4. 掌握红外线倒车雷达测量和调试技能。
NE555和运放 LM324LM324的第2脚进行放大,放大后的四.项目实施1. 红外线倒车雷达电路原理图2.电路核心元件介绍 1) 红外发射和接收管红外发射管也称红外线发射二极管,属于二极管类。
它是可以将电能直接转换成近红外光(不可见光)并能辐射出去的发光器件,主要应用于各种光电开关及遥控发射电路中。
红外线发射管的结构、原理与普 通发光二极管相近,只是使用的半导体材料不同。
红外发光二极管通常使用砷化镓((GaAIAs )等材料,采用全透明或浅蓝色、黑色的树脂封装。
汽车倒车测距仪的设计
编号:审定成绩:设计(论文)题目:汽车倒车测距仪的设计摘要随着我国经济的飞速发展,汽车的需求量急剧增加,现在家家户户拥有汽车已经成为现实。
但是随着汽车数量的增加,其引发的事故也不断的在增加。
倒车引发的汽车事故也占不小的比重,而倒车时车尾存在的盲区是其主导因素,因此解决倒车盲区是安全驾驶必须要解决的问题。
本设计采用以STC89C52单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法。
整个电路采用模块化设计,由主程序、预置子程序、发射子程序、接收子程序、显示子程序等模块组成。
各探头的信号经单片机综合分析处理,实现超声波测距仪的各种功能。
在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
相关部分附有硬件电路图、程序流程图。
该设计通过模块的组合和软件的控制,实现了设计要求的功能,本设计在使用上面方便,成本较低,可设置最小距离,不但完成了这些功能,还达到了汽车倒车的安全指标。
【关键词】STC89C52 超声波测距仪蜂鸣器LCDABSTRACTWith the rapid development of our economy,the demand for cars has increased dramatically, and now each and every family has a car has become a reality. But with the increasing number of cars, the accidents are increasing.Reversing rear blind spot is the dominant factor and finally solved reverse dead zones be safe driving have to resolve this problem.At the core of the design using STC89C52 low-cost, high accuracy, Micro figures show that the ultrasonic range finder hardware and software design methods. Modular de-sign of the whole circuit from the main program, pre subroutine fired subroutine receive subroutine. Display subroutine modules form. SCM comprehensive analysis of the probe signal processing, and the ultrasonic range finder function. The overall system design, hardware and software are presented.The design of the control modules and software, achieve the design requirements of function. The design is easy to use, low cost and feasible to set the minimum distance. These features are not only finished, also reached the Auto reverse safety indicators.【Key words】STC89C52 Ultrasonic rangefinder Buzzer LCD目录前言 (1)一、研究背景 (1)二、研究现状 (1)三、研究方法 (2)四、本研究的主要内容与论文组织结构 (2)五、本设计研究的意义 (4)第一章主要原器件介绍 (5)第一节STC89C52单片机 (5)第二节HY-SRF05超声波模块 (9)第三节LCD1602 (11)第四节其他的电子元件介绍 (14)第五节本章小结 (15)第二章倒车系统方案的设计 (16)第一节系统整体方案 (16)第二节最小系统的设计 (17)第三节显示报警模块的设计 (18)第四节超声波测距设计 (18)第五节本章小结 (19)第三章系统硬件设计 (20)第一节超声波测距模块 (20)第二节LCD1602显示模块设计 (22)第三节LED灯和蜂鸣器的硬件设计 (22)第四节本章小结 (23)第四章系统的软件设计 (24)第一节主程序设计 (24)第二节LCD1602显示程序的设计 (26)第三节蜂鸣器分段报警程序 (27)第四节本章小结 (29)第五章系统的调试 (30)第一节硬件的调试 (30)第二节软件的调试 (30)第三节本章小结 (31)结论 (32)致谢 (33)参考文献 (34)附录 (36)一、英文原文: (36)二、英文翻译: (40)三、工程电路图 (43)四、程序 (45)前言一、研究背景随着我国经济的建设、社会的进步、人们生活水平的提高,汽车已经与老百姓的生活密不可分,已不再是奢侈品。
倒车影像判断距离的原理

倒车影像判断距离的原理
倒车影像判断距离的原理主要是通过摄像头捕捉到的后方画面来辅助驾驶员判断距离。
具体原理如下:
1. 摄像头:汽车后方安装一枚摄像头,通常安装在后备厢盖或者保险杠上。
摄像头具备广角镜头,能够拍摄到较宽的后方画面。
2. 影像传输与处理:摄像头通过车载线路将拍摄到的画面传输到中控屏幕或车载导航系统上,并经过图像处理技术进行处理。
3. 距离标识线:图像处理技术会在中控屏幕上显示出一组距离标识线,一般以虚线或者实线的形式出现。
这些线条会与实际道路上的车辆或障碍物进行重合,帮助驾驶员判断距离。
4. 角度矫正:由于摄像头的安装位置和角度不同,对实际距离进行了设定的放大或者缩小。
图像处理技术可以对图像进行矫正,使画面符合实际情况。
5. 参考线:一些倒车影像系统还会提供参考线,包括水平线和垂直线。
水平线通常表示地面平面,帮助驾驶员判断自车与障碍物的距离;垂直线则帮助驾驶员判断自车的位置和角度。
综上所述,倒车影像通过摄像头拍摄到的后方画面,并经过图像处理技术来辅助
驾驶员判断距离。
通过显示距离标识线、参考线等信息,帮助驾驶员更准确地判断自车与障碍物的距离,避免碰撞和事故发生。
浅谈倒车雷达工作原理
浅谈倒车雷达工作原理倒车雷达,也称倒车雷达系统,是现代汽车车载电子技术中的重要成果之一。
它主要用于辅助驾驶员在行驶车辆时进行倒车或者停车操作。
通过利用超声波或者雷达等无线电技术,倒车雷达可以探测到车身周围的障碍物距离,并及时发出警告提示,为驾驶员提供一个更加安全的倒车或者停车环境。
本文将针对倒车雷达的工作原理进行一一讲解,帮助读者深入了解其运作机制。
1、超声波探测原理超声波探测利用超声波原理来对车身周围环境进行探测。
它的探测方式类似于蝙蝠定位,通过发射一定频率的超声波,当波遇到物体时,会发生反射,并返回到发射源处。
以此来测定物体的距离与方向。
超声波信号的频率在20KHz左右,不会对人体造成任何危害,并且在车速低于30公里每小时的情况下,它可以有效地帮助驾驶员控制车身的移动。
2、雷达探测原理雷达探测也是利用无线电技术来探测车身周围环境。
它可以发射一个高频电磁波信号,在雷达波遇到物体时,会发生反射,并返回到发射源处。
以此来确定物体的距离与方向。
雷达探测的频率通常在24GHz 左右,其探测距离远高于超声波技术,能够在车速高于30公里每小时的情况下仍然能够发挥作用。
两种探测技术的优缺点超声波技术与雷达探测技术各有优缺点。
超声波探测技术具有探测精度高和响应迅速等优点,适用于低速车辆,如停车或倒车时的探测。
但是在高速行驶过程中,它的反应时间较慢,探测距离远远不及雷达探测技术。
同时,当超声波接触到障碍物表面较为粗糙时,其反射信号会变得光滑,探测精度将会降低。
雷达技术因其强大的探测能力,在高速行驶、远距离探测等方面占有明显优势。
它可以在车辆行驶至一定速度时依然进行探测,对车身周围的环境提供更广阔的探测视野。
当然,雷达技术也不能完全摆脱缺点,其成本较高,而且存在较强的电磁辐射。
无论是超声波技术还是雷达探测技术,它们的目标都是提高行车安全性,减少交通事故发生。
因此,在不同的车型上,将根据实际需要来选用不同的探测技术。
汽车的测速及倒车提示系统分析——

汽车测速及倒车提示系统的分析摘要:本文主要介绍了汽车的测速及倒车系统电路原理分析。
该系统采用AT89S52单片机为控制核心,实现了转速检测及倒车测距等功能。
采用光电式轮速检测的方法进行汽车的转速检测,速度可通过按键进行调整分为快中慢三档;倒车系统主要采用超声波测距的原理进行汽车尾部与障碍物间距离的测量,在倒车时会有提示音,声音的大小也是可以调节的;同时检测的速度及倒车的距离均可通过数码管进行及时的显示。
关键字:AT89S52 CX20106A 光电耦合器1 绪论随着人们生活水平的不断提高,汽车已经成为生活中主导的交通工具,汽车产业蓬勃发展。
为保障汽车驾驶时的舒适性和安全性世界各国对汽车防撞技术的研究和发展投入了大量的人力、物力和财力,据统计,危机情况时,如果能给驾驶员半秒钟的预处理时间,则可分别减少追尾事故的30%,路面相关事故的50%,迎面撞车事故的60%,所以现在汽车安装各类测距系统以保障行车安全。
超声波测距是汽车泊车或者倒车时的安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
通过测距来发现障碍物,计算简单,方便迅速,易于做到实时控制,距离准确度达到工业实用的要求。
超声波测速雷达用于测距上,在某一时刻发出超声波信号,在遇到被测物体后的射回信号波,被倒车雷达接收到,得用在超声波信号从发射到接收回波信号这一个时间而计算出在介质中的传播速度,这就可以计算出探头与被探测到的物体的距离。
针对我国高速公路交通安全的需要,以及国内外汽车电子技术的应用现状和发展趋势,综合汽车电子技术、通讯技术和控制技术等多学科理论,从必要性、可行性、实用性和经济性等角度出发,提出开发研制汽车测速及倒车提示系统。
目的在于当行车处于高速及倒车状态时,提醒驾驶员或自动采用相应措施,从而减少或避免高速公路碰撞事故的发生。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车倒车测距仪原理及电路分析
汽车倒车测距仪能测量并显示车辆后部的障碍物离车辆的距离,同时可根据报警“嘟嘟”声的间隙来判断距离的远近。
主要技术指标:最大探测距离5m;测距相对误差〈士5%;工作环境:-10~55C。
雨、雪、雾及黑夜均不受影响。
汽车倒车测距仪电路图a为汽车倒车测距仪电路原理图。
IC1、IC2、IC3组成单片机的最小系统。
IC3为CPU芯片,IC1为接口电路,IC2为EPROM,内存汽车倒车测距工作程序。
仪器有 3位LED数码管显示距离,小数点固定在第一位数字后.显示单位为米。
IC3的P1 口输出 7段显示信号,低电平有效。
IC3第10~12脚为数显控制端,低电平有效。
数显系统采用扫描显示。
IC3第14脚为发射电路控制端,卨电平有效。
汽车倒车测距仪电路图b为40kHz超声波发射电路,IC4为2输人端4与非门,其中两个门组成多谐振荡器.调冇RP1可调节其振荡频率。
IC3第13脚为接收信号输人端,低电平有效。
汽车倒车测距仪电路图c为音频报警电路。
汽车倒车测距仪电路图d为反射信号接收电路,第二级放大器反馈回路采用LC 并联谐振,以提高整机抗干扰性能.U采用收录机陷波线圈,调谐在40kHZ频率上。
放大后的反射信号,经VD2、C12整流滤波后输入IC6第4只运放进行电压比较.调节R17,即能调节整机接收距离。
当信号有效时,VT5管输出一个低电平脉冲。
系统软件根据发射信号和接收信号之间的时间差计算并转换成距离信号予以显示报警。
IC3第15脚为报警信号控制端,髙电平有效。
图3-10(c)为音频报警电路,IC4另两个门组成音频振荡器,振荡频率约800HZ,由C3耦合至IC5 (LM386)音频放大后驱动扬声器发出“嘟嘟”间隙报警声。
当探测到车后有障碍物时,即IC3第13脚有低电平信号输入时,系统软件根据障碍物距离远近输出不同频率的控制方波,距离远方波频率低,嘟声间隙时间长;距离近,方波频率髙,嘟声间隙
时间短。
因此,驾驶员可以不看数显也能判断出距离障碍物的远近。
1C3第16脚输出STOP报警灯信号,当距离障碍物在30cm以内时,输出高电平. VT4导通,发光二极管VD1导通发光,表示应迅速停止倒车。
此高电平信号也可用于控制自动刹车。