钢管自动码包机设计
型钢成品码垛自动控制系统设计分析

型钢成品码垛自动控制系统设计分析摘要:文章以型钢成品码垛自动控制系统为研究对象,首先对系统工作原理进行了简要分析,进而对整个自动控制系统的基本构成情况进行了简要分析,最后就型钢成品码垛自动控制系统设计过程中的关键问题做出了详细分析与阐述,望能够引起各方工作人员的特别关注与重视。
关键词:码垛自动控制系统设计分析PLC 变频器0 引言现代意义上,码垛的最核心概念就在于:建立在集成单元化思想基础之上,将单件、分散的物料按照一定的模式进行集中处理,其目的在于为后续有关物料的储存、运输、以及装卸活动提供便捷。
在现代化的生产操作当中,对于物料自重较轻、尺寸相对较小、且吞吐量相对较小的情况下,应用人工式的码垛方案即可取得良好的效果。
然而,对于工作量较大、物料自身重量较重、且尺寸变化相对明显的情况来说,长时间性的进行人工式的码垛作业不但会导致工作效率的体现,更可能导致相关工作人员的人身健康受到不利的影响。
并且,实践研究结果证实:基于自动化的码垛控制方案不单单能够提高物料处理的速度,缓解对人身健康的不利影响,同时在提高物垛整齐性,降低物料受损率,提高处理柔性水平等多个方面,也有着重要的作用与意义。
本文即针对此问题,做详细分析与说明。
1 型钢成品码垛自动控制系统工作原理分析在整个型钢成品码垛自动控制系统的应用过程当中,主要所涉及到的码钢品种包括以下几种类型:(1)H型钢;(2)工字钢;(3)槽钢。
码钢产品长度均在12.0m范围之内。
在整个自动控制系统的运行过程当中,首先需要在输送辊道当中,完成对钢材的输送及挑选,进而传递至链条式移钢台架当中。
在此环节工作过程中,将生产线上所存在的质量性能不合格型钢产品统一传递至短尺区。
于此同时,需要对质量合格的型钢产品按照规格、尺寸进行分组、对齐,确保所输送的型钢产品能够准确、整齐的进入到链条式移钢台架当中;再通过分组、定位机构,对已分组的型钢产品在预定的位置实施翻转码垛。
在交替运行动作的实施过程当中,借助于收集框的升降,实现对不同类型钢材的堆垛;进而,传输辊道传递型钢堆垛至压紧机构处理区域,确保堆垛的整齐性与紧密性,最后在输送辊道的作用下,完成整个处理。
码垛机设计方案
码垛机设计方案(总12页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--码垛机设计方案(一)一:系统方案概述经对贵公司产品、场地的分析,技术需求、指标的详细研究和理解,为了充分满足该技术要求,对本工程我们采用方案附图所示的机器人码垛系统。
一:总体方案本机器人码垛系统,通过品质一流品牌的接近开关、按钮开关、可编程控制器等硬件和专家设计的专门控制软件相结合,实现了从客户自身的包装线出来的站立式包装袋到最后的码垛成型,均为无人的高度自动化系统。
完善的安全联锁机制,可以对设备和操作人员提供保护。
图形显示的触摸屏使整个系统操作简单,故障诊断容易,同时方便了检修和维护。
并且每套系统出厂都经过严格的系统测试,保证客户的运行安全、可靠、稳定。
本机器人码垛系统如附图1所示,由1.倒包线、2.提升线、3.整形线、4.抓取线、5.码垛机器人,五部分构成。
其各部分工作过程和其主要功能阐述如下:从称量秤、缝包机等客户末端出来的袋装产品均为站立式,通过输送机,当包装袋到达倒包线(附图2所示)时,包装袋会接触到其①倒包横梁,自身倒在②倒包板上,然后通过③防滑输送带的传送和④导向滚筒的导向,包装袋会自动调整为长度方向与流水线平行的纵向输送。
且此倒包线为高度可以调整型。
如果客户在更换产品,导致包装袋长度、称量秤输送线的高度有更改时,此倒包线可以通过其升降按钮,来驱动自身的升降电机,做高度的自动调整。
2提升线3整形线4抓取线5码垛机器人1倒包线附图2:倒包线由于产品从不同高度,客户端输送和倒包线有高度调整,为了更好统一的做码垛规划,最大发挥码垛机器人的功效和码垛能力,现增加提升线(附图3所示)将倒包线出来的包装袋提升到某一统一高度。
此提升线为配合前段的自动升降,亦增加有自动升降按钮,可以调节升降电机控制单边提升高度与前段平齐,保证后端高度不变。
附图3:提升线当产品从提升线出来,进入的是整形线(附图4所示)。
Ф219系列钢管码垛机自动输送机构的优化设计

+219系列钢管码垛机自动输送机构的优化设计李震!,2,柴晓艳!,2,贺凯悦!,2(1.天津市先进机电系统设计与智能控制重点实验室,天津3003842.机电工程国家级实验教学示范中心(天津理工大学),天津300384)摘要:本文对%19系列钢管码垛机自动输送机构进行了介绍,并分析了直径为+165 mm钢管 的码垛参数。
在ADAMS-V b w模块中对码垛机进行三维建模、参数化分析、优化设计,对码垛机的液压缸出力位置以及杆长等设计参数进行了优化,使得液压缸最大升降力降低了16.89%,平均升降力降低了7. 98%,将此结果数据应用到实际生产中,极大地降低了升降机构的能耗。
关键词!钢管码垛机;升降机构;平移机构;优化设计中图分类号:TG335 文献标识码:A 文章编号:1001 -196X(2018)03 -0071 -04Optimal designof the automatic conveying mechanism for!219 series steel tube stacking machineLI Zhen1,2,CHAI Xiao-yan1,2,HE Kai-yue1,2(1. Tianjin Key Laboratory for Advanced Mechatronic System Design and I ntelligent Control,School of MechanicalEngineering,Tianjin University of Technology,Tianjin 300384, China;2. National Demonstration Center forExperimental Mechanical and Electrical Engineering Education (Tianjin University of Technology)Tianjin 300384,China)Abstract: I n t his paper,the automatic conveying mechanism of &219 series Steel tube stacking machine is introduced,and the stacking parameters of &165 mm steel tube are analyzed. The stacking machine has been carried out tlie three dimensional modeling,parametric analysis and optimum design using by ule ,and the design parameters of stacking machine such as the hydraulic cylinder position are optimized. The maximum lifting power of hydraulic cylinder is reduced by 16. 89%,and the average liftingpower is reduced by 7. 98% . The result data is applied to the actual production,and the energy consumption the lifting mechanism is greatly reduced.Keywords:steel tube stacking machine;lifting mechanism;translation mechanism;optimization design〇前言随着我国生产力的快速发展,钢管产业对其生产设备提出了更高的要求,钢管码垛机可以更高效地对钢管进行码垛工作。
新型全自动高速型钢码垛机设计
新型全自动高速型钢码垛机设计摘要:现如今,我国经济发展十分迅速,随着技术的进步,型材制造企业对轧线进行了升级改造,实现在同一条轧线上生产小H型钢、槽钢、角钢、C型钢及其它规格型材,大大节约了投资成本。
在上述型钢生产的过程中,还没有适合的码垛设备能同时覆盖上述产品的自动码垛工作。
小型材码垛普遍采用人工码垛方式,效率低、人工成本高、工作环境恶劣及安全生产隐患多等问题突出。
现有的型钢码垛机多集中应用于大规格型钢生产领域,存在成本高、工作节拍慢、适用产品规格范围窄、编组效率低、需要人工干预等问题,很难在生产小规格型钢的企业中推广应用。
关键词:新型全自动;高速型钢码垛机;设计引言随着我国国防工业、航天技术、高铁、大型舰船等战略性工程的发展,以及天然气工程、西气东输工程等关乎人民生活的各种基础设施的建设,国内对于各种类型钢管的需求量不断提升,对钢管生产设备的不断升级也提出了更高的要求。
钢管码垛机在国内外市场已经经过了几十年的发展,国内许多钢管设备供应商己经有一定的码垛机制造能力,但由于码垛机本身的技术比较复杂,国内的码垛设备自动化程度较低,且码垛的位置精度不足,所以国内许多钢管生产商的码垛机设备依然依赖于国外进口。
针对上述现象,国内钢管生产行业急需一个新型码垛技术来完善码垛设备,以解决目前国内相关设备的缺陷。
本文的研宄方案从实际出发,研宄出一种改善现有码垛机自动化控制方式,提高现有设备的生产效率和码垛精度,并保证现场工人操作安全的控制系统。
1自动码垛机随着经济的发展,自动码垛机逐渐代替了人工码垛。
它主要由水平方向动作机构、垂直方向动作机构和货叉动作机构三部分组成,水平方向动作机构和垂直方向动作机构配合运行使自动码垛机精确到达存取货位置,存取货由货叉动作机构完成。
货叉动作机构在实际工作中,要前伸到货架内取货和后退到卸货位置卸货,这样只有两个定位点。
系统内采用接近开关定位的方式来实现要求。
由取货位接近开关、接近取货位接近开关、卸货位接近开关、接近卸货位接近开关组成。
码垛机设计及优化方案
码垛机设计及优化方案一、介绍码垛机是一种自动化设备,用于将物品按照预定的方式堆放在货架或托盘上。
在物流和制造业中,码垛机的设计和优化方案对提高运输效率和降低人力成本至关重要。
二、设计方案1. 系统结构设计码垛机的结构设计应考虑以下几个因素:物品特性、堆放方式、垛高和垛形。
基于这些因素,可以选择合适的机器臂类型,如固定臂或旋转式臂,来满足需求。
此外,还应考虑系统的稳定性和安全性,以确保机器在堆叠过程中不会发生意外。
2. 视觉识别技术在码垛过程中,视觉识别技术可以帮助机器准确定位和识别物品。
使用相机、激光传感器或深度学习算法,可以实现高精度的物品检测和定位,从而提高码垛的准确性和效率。
3. 控制系统设计码垛机的控制系统应具备实时性和稳定性。
采用PLC(可编程逻辑控制器)或机器人控制器,以确保机器的运作安全可靠。
此外,通过优化控制算法和调整动作路径,可以降低机器的响应时间和能耗。
4. 系统集成与联动码垛机还需要与其他设备或系统进行联动,以实现物料的输送和堆放。
因此,在设计方案中需考虑与传送带、输送机、仓储系统等设备的良好协作。
同时,也应考虑与上层MES(制造执行系统)或WMS(仓储管理系统)的集成,实现自动化的物流管理。
三、优化方案1. 算法优化通过针对码垛机动作路径、物料识别和堆叠算法的优化,可以提高码垛的速度和准确性。
例如,使用优化的路径规划算法,可以减少机器移动的距离和时间,从而提高整体的效率。
2. 自适应调整码垛机应具备自适应调整的能力,以适应不同尺寸、重量、形状和堆放方式的物品。
通过自动调整机械臂的参数和力度,以及视觉识别系统的参数,可以确保机器在面对各种物品时具备适应性和稳定性。
3. 数据分析与追溯在码垛过程中,收集和分析关键数据可以提供有价值的信息。
通过分析堆放过程中的效率、准确性和资源利用情况,可以发现潜在问题和改进空间。
此外,通过对码垛记录进行追溯,可以追踪和溯源每个垛位的物料信息,提高整体的物流可追溯性。
码垛机设计与优化

码垛机设计与优化码垛机是一种自动化设备,用于将物体按特定规则进行堆垛,提高物流和仓储领域的生产效率。
本文将探讨码垛机的设计与优化,包括机器的选择、布局、运行速度和优化方案等。
一、码垛机的选择在进行码垛机设计之前,首先需要选择合适的机器。
主要考虑以下几个方面:1. 适应性:机器需要能够适应各种尺寸和重量的物体。
因此,机器的承重能力和工作范围是选择的关键。
2. 灵活性:机器应当具备较高的灵活性,能够适应不同类型的货物。
对于不同尺寸或形状的物件,机器应能自动调整其操作方式。
3. 精确性:机器需要具备高精度,能够将货物准确地码放在指定位置。
这对于保证库存管理和出货准确性至关重要。
4. 高效性:机器应当具备较高的运行速度,以提高生产效率。
然而,高速操作也需要考虑安全因素,以及避免物体损坏或覆盖的问题。
二、码垛机的布局码垛机的布局设计是码垛系统最关键的一环。
以下几个方面需考虑:1. 空间利用:尽量最大化利用空间,以实现系统的紧凑布局。
优化空间布局可以提高物流效率和运行速度。
2. 流程优化:设计合理的物料流及工作流程,减少生产线上的等待时间。
这将有效地提高整个系统的效率。
3. 安全性:确保机器操作时安全可靠,防止事故发生。
这包括设置防护装置、采用可靠的传感器和紧急停机装置等。
4. 灵活性:设计灵活的布局,方便后期进行系统扩展和升级。
考虑未来的需求变化,确保布局的可调整性和可扩展性。
三、码垛机运行速度的优化码垛机的运行速度是决定生产效率的关键因素之一。
以下是一些优化码垛机运行速度的方法:1. 算法优化:通过改进机器的控制算法,提高操作速度和准确性。
优化代码的执行效率,可大幅提高机器的响应速度。
2. 机械设计优化:提高机器的结构刚性和动态响应能力,减少运动过程中的振动和摆动。
这将使机器能够以更高的速度稳定地运行。
3. 传感器使用优化:使用高精度和快速响应的传感器,能够准确感知货物的位置和状态。
这将有助于快速、准确地完成码垛操作。
码垛机设计及其应用研究
码垛机设计及其应用研究一、引言码垛机是一种自动化设备,用于将物体堆叠在一起,形成一定的结构。
随着半导体、电子、食品等行业的快速发展,对自动化生产提出了更高的要求,码垛机成为推动生产效率和降低人力成本的重要设备之一。
本文将探讨码垛机的设计原理、应用领域和未来发展趋势。
二、码垛机设计原理1. 机械结构码垛机主要由框架、轨道、天轴、托盘传送带和抓取装置等组成。
通过轨道的移动,使天轴上的抓取装置可以准确地抓取并移动物体,并将其放置在指定的位置。
同时,为了确保设备的稳定性和安全性,需考虑重心平衡、支撑结构和防护装置等因素。
2. 控制系统码垛机的控制系统通常采用PLC(可编程逻辑控制器)作为核心控制元件。
通过传感器与PLC的连接,实时检测和反馈运行状态,实现自动化控制和应急停止等功能。
此外,还可以通过与上位机的通讯,实现生产计划的调度和远程监控。
3. 抓取算法为了能够准确地抓取物体并完成堆叠,码垛机需要具备一定的视觉识别和运动规划能力。
常用的抓取算法包括基于视觉识别的物体定位、基于力传感器的抓取力调整和基于路径规划的抓取轨迹生成等。
这些算法的优化和应用,对提高码垛机的抓取稳定性和速度具有重要意义。
三、码垛机的应用领域码垛机的应用广泛,以下列举几个主要领域:1. 电子行业在电子产品的生产过程中,需要对电子元件进行堆叠和包装。
通过自动化的码垛机,可以提高产品的生产效率和质量,并减少人工操作的错误率。
2. 食品行业食品包装通常需要按照一定规则进行堆叠和封装。
码垛机能够根据生产计划和产品规格,高效地完成堆叠任务,并确保产品的质量和卫生。
3. 仓储物流在仓储物流系统中,码垛机可以将货物从传送带上抓取并堆叠在托盘上,以提高仓储空间的利用率和物流效率。
同时,码垛机还能够实现货物的分拣和装箱,减少人工操作和运输时间。
四、码垛机的未来发展趋势码垛机作为自动化生产的关键设备,未来的发展趋势将呈现以下几个方向:1. 智能化发展随着人工智能和机器学习的快速发展,码垛机将具备更强的智能化和自学习能力。
基于PLC控制的全自动码垛装置设计
2023年 / 第7期 物联网技术1310 引 言钢管的码垛是钢管出厂前的最后一道工序,钢管码垛设备将多根钢管按照规则的形状堆叠码垛在一起。
现有的钢管码垛设备中,电磁吸盘是通过固定的导轨及升降机构驱动,将钢管吸取后随着导轨及升降机构运送,随后电磁吸盘将钢管码垛在一起[1]。
然而,当钢管的形状或管径变化后,需要调整导轨及升降机构的运送路径以适应新的钢管结构,造成切换不同种类钢管生产时的效率低下[2]。
与此同时,对于实现钢管生产线的自动化,提高生产效率,钢管自动码垛装置成为钢管生产线上必不可少的装置之一。
市面上还有一种情况是:将大量钢管沿供管台移动直接滚落到与供管台有一定落差的六边形成型框架中,经过人工微调后将钢管捆成六角形捆。
但钢管从供管台掉落至成型框中会产生一定碰撞,造成钢管表面损伤;同时掉落不到位还需要人工微调,浪费劳动力,增加人工成本。
我国钢铁产品出口量快速增长的同时,钢铁企业也面临着激烈的市场竞争。
钢管码垛的方法有很多,但是主要特点就是需要人工数量较多、人工劳动强度高、码垛速度慢,从而造成生产成本高、生产速度慢,进而影响企业的效益。
近些年有一些企业研制出了钢管码垛成型设备,但是这些成型设备存在着生产及维护成本较高、操作复杂等缺陷。
因此,为了顺应国家“十四五”规划中制造业的改革升级目标,解决钢管在码垛时易受损伤和劳动力浪费的问题[3],本文设计了一款适用多种型号冷轧无缝钢管的个性化全自动码垛装置。
1 系统总体设计1.1 控制要求由伺服电机[4]与转轴相连接,带动传送带将钢管向前输送,依靠前方止落架使钢管停止运动;承载着立柱码垛机械臂的平台通过底部地轨中的齿轮传动与链传动实现整个码垛部分的运动;横梁和夹具由电机与滚珠丝杠传动机构带动,实现空间位置的改变;由气缸[5]、电机与滚珠丝杠传动机构组成的三维运动装置实现抓头空间位置的微调,进而应对不同情况下的抓取任务;码垛架其中一侧的框架由电机与滚珠丝杠控制,实现整个码垛架在长度与宽度上的改变,以适应不同要求的钢管码垛。
一种异型管材自动码垛设备及方法
一种异型管材自动码垛设备及方法
一种异型管材自动码垛设备及方法,包括以下步骤:
定位:将管材放置在预设的输送带上,输送带将管材送至码垛位置。
在管材到达码垛位置时,码垛机械手通过传感器识别管材的位置和姿态,并进行微调,确保管材处于正确的码垛位置。
夹持:码垛机械手采用多段可调式夹具夹持管材。
夹具的夹持力度可以根据管材的大小和材质进行调整,确保管材在码垛过程中不会滑落或变形。
搬运:码垛机械手将管材从码垛位置搬运至指定的高度和位置,可以通过搬运多个或单个管材进行码垛。
放置:码垛机械手将管材放置在预设的托盘上,每个托盘可以放置多个管材。
放置时,码垛机械手通过传感器识别托盘的位置和姿态,并进行微调,确保管材放置在正确的位置上。
重复操作:码垛机械手重复以上步骤,直至完成预设数量的管材码垛。
该设备和方法可以自动化地完成异型管材的码垛工作,提高了生产效率,减少了人工操作成本和人为错误,并确保了生产的稳定性和一致性。
高效自动码垛机的设计与优化
高效自动码垛机的设计与优化自动码垛机是一种应用于物流行业的自动化设备,可以将货物按照设定的规则进行准确、高效的堆放,提高物流效率和节约人力资源。
在设计和优化高效自动码垛机时,需要考虑以下几个方面。
1. 机器结构设计高效自动码垛机的机器结构设计需要满足稳定可靠、操作简单等要求。
首先,需要选择合适的材料和制作工艺,确保机器的结构牢固、稳定。
其次,机器的设计应简洁,方便维护和操作。
特别是对于大型自动码垛机,应考虑机器的体积、重量等因素,以便于在物流仓库中移动和布局。
2. 感知与导航技术高效自动码垛机需要具备感知和导航的能力,可以识别货物位置、大小、重量等信息,准确地进行堆放。
为此,可以采用机器视觉技术,通过摄像头、传感器等设备获取货物的相关信息。
在导航方面,可以采用激光导航、自动导航小车等技术,提高码垛机的定位和导航精度。
同时,利用人工智能算法,对感知和导航过程进行优化,提高系统的响应速度和准确度。
3. 动力系统设计高效自动码垛机的动力系统设计需要考虑到载重量、速度和能量效率等因素。
选用适当的电动机和传动装置,确保机器的顺畅运行和高效能。
同时,应采用节能技术,如回馈系统、变频调速等,降低机器的能耗,提高系统的能源利用率。
此外,还需要考虑到噪音和振动问题,采取减噪和减振措施,提升使用者的舒适性。
4. 控制系统设计高效自动码垛机的控制系统设计需保证准确、灵敏和可靠。
应选用高性能的控制器和传感器,确保码垛机的动作准确度和稳定性。
同时,需要设计合理的控制算法,提高系统的控制精度和反应速度。
此外,可以采用与物流信息管理系统的接口,实现与其他设备的协同工作,提高整个物流系统的效率。
5. 安全性与可靠性设计高效自动码垛机的安全性和可靠性是设计和优化的重要考量因素。
为确保操作人员和设备的安全,应加装安全传感器和保护装置,及时检测异常情况并及时停机。
同时,对设备进行全面的可靠性分析,消除故障源,降低设备故障率,提高设备的可靠性和稳定性。
型钢码垛机自动控制的设计与实现
型钢码垛机自动控制的设计与实现摘要:本文介绍了一款型钢码垛机的自动控制系统的设计与实现。
该系统采用了PLC+人机界面的控制结构,通过不断分析与测试实现了机器的自动化控制。
本设计方案采用了脉冲计数法和PID反馈控制法来实现对机器的精确控制,从而提高了机器的效率和稳定性,并且使人机操作更加方便快捷。
设计实现的结果表明,本系统在实际应用中具有较高的稳定性和可靠性。
关键词:型钢码垛机;自动控制;PLC+人机界面;脉冲计数法;PID反馈控制法正文:一、引言随着科技的不断发展与进步,工业自动化技术也不断的得到应用与发展。
型钢码垛机作为一种常见的工业自动化设备,已经得到了广泛的应用。
而型钢码垛机的自动控制是整个设备运行的核心,因此如何实现对型钢码垛机的自动控制是一个非常值得研究的问题。
二、型钢码垛机的设计与实现1、型钢码垛机工作原理型钢码垛机是一种自动化的物流设备,可以实现对型钢等产品的自动码垛。
该设备由框架、输送机、分离器、码垛机构、电气控制系统等组成,工作原理如下:首先通过输送机将型钢等产品送进分离器,经过分离器的分离处理,然后将型钢等产品按照设定的码垛方式进行自动垛装。
2、型钢码垛机的自动控制系统设计本设计方案采用了PLC+人机界面的控制结构,将整个机器的控制信号和反馈信号都通过PLC进行管理和控制,然后通过人机界面来实现对机器的操作和监测,具体控制流程如下图所示:图1 型钢码垛机自动控制系统设计方案本设计方案中采用了脉冲计数法和PID反馈控制法来控制机器的位置和速度,具体实现方式如下:首先通过脉冲计数法来控制电机的位置,每次运行时将转动次数进行计数,从而控制电机的位置,保证每次的运行角度一致。
然后通过PID反馈控制法来控制电机的速度,通过不断的调节PID参数,使得机器的运行速度更加稳定和精准。
三、实践应用效果本设计方案制作的型钢码垛机可以实现自动化控制,并且在实际运行中可以保证机器的稳定性和可靠性。
通过不断的测试和分析,本系统可以实现每分钟垛装2000根型钢的生产要求,具有较高的效率和稳定性,同时操作方便、快捷,提高了生产效益。
一种码垛机设计说明书

机械专业综合实训课程设计说明书四层5x5码垛单元(机械部分)设计说明书设计题目:班级:2011级2班设计者:陈龙****:***完成日期:2014年7月日一、总体方案设计1.1 设计任务设计一码垛单元。
该码垛单元可实现每垛4层自动堆叠,层间用塑料隔板。
设计参数如下:产品总体尺寸Φ120mm×100mm,重量G1=70.4N;产品图如下,需将其5×5矩阵布局单元堆叠成四层码垛单元,层间用塑料隔板(塑料隔板厚度为5mm)。
一垛整体尺寸为600mm×600mm×420mm,重量为G=7040N,传送带高度800mm。
1.2 总体方案确定(1)码垛方式由于每一层为5×5矩阵布局单元,不能进行夹持;因此采用产品的升降来实现码垛,每码一层,让下降一个产品和塑料隔板的高度105mm,码完四层后为一垛。
(2)塑料隔板的进给和产品的转移塑料隔板的进给使一张塑料隔板上升至产品的初始高度,再将塑料隔板推动至码垛位置并延时回程(延时作用:在一层产品推过来时,限制其位置,使它准确的在码垛位置)。
产品的转移也采用执行元件推动的方式将产品推送至指定位置。
(3)执行元件的比较与选择本设计方案中需要实现的运动主要有推动产品的水平直线运动和使产品上下的直线往复运动。
可实现推动产品的水平直线运动的执行元件包括液压缸推动、气缸推动和丝杠螺母传动机构等等。
丝杠螺母传动机构主要是用来旋转运动变换为直线运动或将直线运动变换为旋转运动,丝杠螺母传动机构与步进电机或伺服电机连接可实现丝杠或螺母的行程控制,结构比较复杂;由于本方案只需推动产品到达指定位置,并不需要进行产品的行程控制,因此丝杠螺母传动机构不适用于本设计方案。
气缸与液压缸对比:气缸采用的工作介质是压缩空气,其特点是动作快,但速度不易控制,当载荷变化较大时,容易产生“爬行”或“自走”现象;而液压缸采用的工作介质是通常认为不可压缩的液压油,其特点是动作不如气缸快,但速度易于控制,当载荷变化较大时,采用措施得当,一般不会产生“爬行”和“自走”现象。
码垛机产品设计方案模板
码垛机产品设计方案模板一、项目背景随着现代物流行业的快速发展,码垛机作为自动化设备的重要组成部分,具有提高工作效率、降低人工成本、提高安全性等诸多优点。
为了满足市场需求,我们设计了一份码垛机产品设计方案模板,以帮助企业设计出更符合市场需求的码垛机产品。
二、设计目标1. 提高工作效率:通过优化设计,减小操作误差,提高码垛机的工作效率。
2. 降低人工成本:通过自动化设计,减少对人工操作的依赖,从而降低企业的人工成本。
3. 提高安全性:在设计中考虑安全因素,减少事故的发生,提高工作环境的安全性。
4. 提升产品质量:通过精确的设计和高度稳定性的结构,提升码垛机产品的质量和可靠性。
三、设计要素1. 外观设计:采用简约而现代的外观设计,符合市场审美趋势。
2. 结构设计:采用坚固可靠的结构设计,确保机器在运行过程中的稳定性。
3. 控制系统:配备先进可靠的控制系统,实现高效精准的码垛操作。
4. 动力系统:选择高效节能的动力系统,确保机器在长时间运行中的稳定性和耐用性。
5. 传感器系统:配置高精度的传感器系统,以便及时感知环境变化,并做出相应的调整。
6. 安全系统:引入先进的安全系统,包括紧急停机开关、防撞装置等,确保工作过程中的安全。
四、设计流程1.需求分析:了解客户需求,明确设计要求和性能指标。
2.概念设计:根据需求分析结果,进行初步的设计方案构思,包括外观设计、结构设计等。
3.详细设计:在概念设计的基础上,进行更细致的设计,包括控制系统、动力系统等。
4.制造与测试:根据详细设计结果,进行制造与组装,并进行严格的测试和调试。
5.产品交付:在保证产品质量的前提下,按时交付给客户,并提供售后服务。
五、设计考虑因素1. 环境适应性:考虑码垛机在不同环境下的工作能力和稳定性。
2. 操作简易性:保证码垛机在操作上简单易懂,降低用户使用门槛。
3. 维修方便性:设计方便快捷的维修系统,减少维修时间和成本。
4. 可持续发展:在设计中考虑环保和可持续发展的因素,降低资源消耗和环境污染。
码垛机的设计与优化

码垛机的设计与优化码垛机是一种自动化设备,用于将货物按照一定的规则码垛或拆垛。
在工厂和仓储物流领域,码垛机的设计与优化是非常重要的,它可以提高生产效率、降低人力成本以及减少人为错误。
一、设计原则与要求1. 功能需求:在设计码垛机时,首先要明确其功能需求。
例如,需要能够自动识别货物的类型、尺寸和重量;能够根据规定的堆码规则进行堆放;能够适应不同的物料和堆垛方式等。
2. 安全性:码垛机应具备良好的安全保护措施,避免人员在其运行过程中受伤。
例如,需要设置传感器以检测移动障碍物,以及安装急停开关和警示灯等。
3. 稳定性:码垛机在运行过程中应具备良好的稳定性,减少运动震动和误差。
例如,需要选择合适的驱动系统和控制算法,确保堆放的货物不会倾倒或偏移。
4. 灵活性:码垛机应具备一定的灵活性,能够适应不同批量、尺寸和类型的货物。
例如,需要设计可调节的夹具或托盘支撑结构,以适应不同形状和尺寸的货物堆放。
5. 可维护性:码垛机应具备较高的可维护性,方便维修和更换关键部件。
例如,需要设计易于拆卸和更换的部件结构,以便在故障发生时能够快速修复。
二、优化方案和技术选择1. 自动化技术:可以借助视觉识别技术、激光测距技术等实现对货物的自动检测和尺寸测量,以及实现对码垛工作的自动化控制。
2. 运动控制技术:码垛机的运动控制涉及到伺服电机、导轨系统、传感器等。
可以选择适当的控制算法和运动规划方式,以实现高精度的位置控制和平稳的加减速过程。
3. 机械设计:码垛机的机械结构设计应考虑到稳定性和刚度。
可以采用高质量的结构材料、精密的制造工艺,并进行合理的结构强度分析和优化设计。
4. 程序设计:码垛机的自动化控制可以通过编写合适的程序实现。
需要将堆码规则和物料信息编码成算法逻辑,确保码垛机能够按照要求进行堆码或拆垛。
5. 系统集成:码垛机的设计与优化还需要考虑整个系统的集成问题。
包括与输送线、物料仓库管理系统等的联动程度,以及与其他自动化设备的协调性。
基于伯朗特工业机器人对钢管的码垛工艺设计与实施

题目:基于伯朗特工业机器人对钢管的码垛工艺设计与实施目录1、设备信息 (1)1.1、工业机器人介绍 (1)1.2、机器人夹具介绍 (1)1.3、送料机构介绍 (2)1.4、放料框介绍 (3)2、钢管码垛要求 (3)2.1、钢管介绍 (3)2.2、钢管码垛要求 (4)3、搬运码垛工艺线路拟定及步骤 (5)3.1、确定编程逻辑及新建程序 (6)3.2、建立主程序逻辑点位 (7)3.3、建立子程序 (17)3.4、程序运行 (20)4、程序展示 (20)5、注意事项 (25)6、总结 (26)参考文献 (26)基于伯朗特工业机器人对钢管的码垛工艺设计与实施1、设备信息1.1、工业机器人介绍本设计中使用的是伯郎特BRTIRPZ2250A型号机器人,该机器人是伯朗特针对某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业等而开发的一款四轴码垛机器人[1],如图1-1所示。
该机器人拥有2200mm臂展,最大负载可达50kg,多自由度的灵活性对上下料、搬运、拆跺、码跺等场景能够应对自如,适用于冲压机、压力铸造、热处理、焊接、涂装、塑料制品成型、机械加工和简单装配等工序。
采用伺服电机搭配高精密减速机,响应速度快,精度高,每天可二十四小时生产,生产效率高。
图1-11.2、机器人夹具介绍本次使用的夹具也就是机器人的外部工具是由两个双作用气缸组成的,气缸分别由一个单电控电磁阀进行控制的,当电磁阀得电时,气缸控制的夹具打开,当电磁阀失电时,气缸控制的夹具夹紧[2],这样就能实现断电也能保持夹紧的状态了,如图1-2所示。
图1-21.3、送料机构介绍送料机构由棍床、锁扣、双作用顶料气缸、电磁阀、接近开关、待码垛位(槽钢)等组成。
棍床用于将焊接位完成的钢管传送至待码垛位,锁扣用于挡住钢管从棍床进入待码垛位,只有当待码垛位没有钢管时,钢管才能从棍床进入待码垛位。
双作用顶料气缸和电磁阀的组成形成一个气动回路[2],当待码垛位没有物料时,顶料气缸就将一个钢管顶送入待码垛位。
浅析型钢码垛机自动收集系统的设计与实现
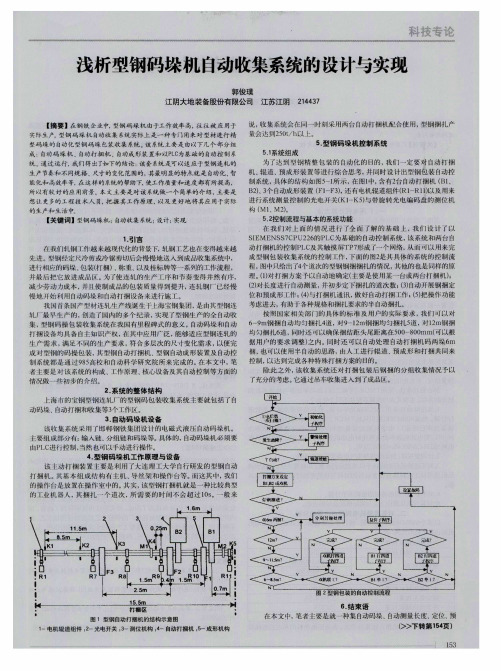
机、 辊道 、 预成 形装 置等进行 综合思 考, 并同时 设 计出型钢包 装自动控
制系统 , 具体 的结构 如图5 一l 所示, 任图l 中, 含有2 台自动打捆 机 ( B 1 、 B 2 ) 、 3 C - 自 动成形装 置 ( F 1 一 F 3 ) , 还有 电机 辊 道组 件( RI - Rl I ) 以及 用来 进行系统测 量控制 的光 电开关( K卜 K5 ) 与带 旋 转 光 电 编 码 盘 的 测 位 机 构 ( M1 、M2 ) 。
浅析型钢码垛机 自动收集系统的设计与实现 江苏江阴
【 摘要】 在钢铁 企业中, 型钢码 垛机 由于工作 效率 高, 往往被 应用于
实际 生 产。型钢 码 垛 机 自 动 收 集 系统 实际 上 是 一 种 专 门 用来 对 型材 进 行 精
2 1 4 4 3 7
以达到 完成各种特殊打捆 方案的 目的。 制系统都 是 通过 9 8 5 高校和 r 1 动科 学研 究院 所来 完成的 。 在 本文 中, 笔 控制 , 除 此之 外, 该 收集 系统 还 对打捆 包装 后钢 捆的分 组收集情况 f . 以 者主要是 对 该系统的 构成 、I 作原理 、 核心设备 及其 自动控 制等 方面的 了充分 的考虑。 它通过 吊车收集进 入到 了成 品区。 情7 兄 做一 屿初 步的介绍。
说, 收 集 系统 会 间 一 时刻 采用两台 自动打 捆机 配合 使用, 型钢 { I I { 扎 产 量会达 ̄2 5 0 t / h以上。
整码垛 的自动化型钢码 垛包装 收集 系统。 该 系统 主要 是由以下几个部 分组
成 :自动 码 垛 机 、自动打 捆 机 、自动成 形 装 置和 以P L C 为基 础 的 自动控 制 系
课程设计计算说明书(码垛机设计)
中国科学技术大学机械工程综合课程设计任务书题目:工业码垛机设计班级:0700901学生:张海滨学号:PB********指导教师:***设计目录1、设计任务分析2、总体方案论证(包括控制系统方案),绘制总体系统草图3、系统及零部分的结构设计(机电装置正常运转所必需的附件及其结构设计或选择,尺寸的确定),以及系统总体刚度和强度的计算校验。
4、运动以及动力参数的计算(动力设计及驱动源的选择、传动装置的确定和分配传动比)5、执行机构类型和执行方式的确定计算6、零件图和装配图的绘制7、典型零件工艺卡片的编写8、参考文献一、设计任务分析1、产品性能码垛机用于各种包装线末端将已装入容器的纸箱,按一定排列码放在托盘(木质)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存。
码垛机应具有一定智能,可根据不同的工艺流程要求,将不同规格的纸质或木质包装箱按预先设定的位置(可编程),整齐地堆放在托盘上。
2、码垛机的技术要求:码垛范围(长×宽×高):1200×1200×1800重复定位精度:(mm)±5.0最大工作速度:(p/min)6最大抓取重量:(kg) 20抓手形式:吸盘式3、运动要求分析:根据上述任务要求,需要码垛机的机械手能够实现空间的三维运动,并且有一定的运动精度和重复定位精度。
同时要求机械手以吸盘的方式抓取纸箱,经运动到指定位置后放开纸箱。
4、尺寸及动力分析:在总体尺寸设计时,考虑X向运动空间需要考虑传送带传送过来的货物占用的空间,所以X向横梁长度2000mm (1200mm+8000mm);Z向支撑梁高度2000mm(1800mm+200mm),横梁宽度200mm*2;Y向横梁长度1800mm(1200mm+600mm),用于叉车的活动空间。
技术要求中需要重复定位精度在±5.0mm,所以采用伺服电机作为动力源,用闭环控制系统,使用位置传感器作为位置检测装置并反馈。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
钢管自动码包机设计
我司生产制造的华捷牌钢管通过涂覆或者中频复合后,成品钢管需进入后工序对钢管表面进行打印字码和商标。
通过后工序处理的成品钢管需要进行码包成正六边形后捆扎打包带和外包装塑料薄膜,以便更好地运输和保护产品。
在成品钢管的正六边形码包环节当中,我司仍需通过人工进行搬运钢管码包。
为提高机械自动化程度,我司特对码包环节进行新一轮机械创新技术改造,以提高我司的码包生产效率及降低工人的劳动强度。
标签:钢管;码包;自动化
Abstract:Our production and manufacture of Huajie steel pipe through coating or if composite,the finished steel pipe enters the post-process to print the surface of the steel tube font code and trademark. The finished steel pipe processed through the post-working procedure needs to be coded with hexagonal strapping tape and outer packaging plastic film in order to better transport and protect the products. In the finished steel pipe hexagonal code package link,we still need to carry out manual handling of steel pipe code package. In order to improve the degree of mechanical automation,we have carried out a new round of mechanical innovation to improve the efficiency of code package production and reduce the labor intensity of workers.
Keywords:steel pipe;code packet;automation
引言
本次设计重点对自动吊装的结构进行了可行改进设计,使用了CAD、Pro/e 等工程制图软件对该机器进行结构设计、绘制和分析。
本设计所使用的丝杆传动与带、链、摩擦、液压等其他机械传动形式相比,具有传动精度和效率高、传动平稳、可靠性好、结构紧凑、和使用寿命长等特点。
1 自动码包机工作原理
1.1 工艺流程
1.2 控制机构
由排管架勾管、电磁吸盘运动机构、集管架升降平台、移管机构四部份组成。
(1)排管架勾管:由刹车电机、旋转勾管机构、停止限位接近开关,有管信号接近开关组成。
功能:控制程序能自动判别每次搬运的钢管在打包架堆放的层数,按六角形打包要求自动控制进料的旋转勾管机构每次连续勾管的支数(准确计算每层排列
的钢管数量),由旋转机构实现快速勾管进料。
(2)电磁吸盘运动机构:含升降伺服控制机构、平移伺服控制机构、电永磁吸盘。
功能:将钢管从上料排管架自动搬运至集管架,并按打包要求分层定位放置,根据包装的钢管排列要求自动实现钢管的有序搬放操作。
(3)集管架升降平台:六角形打包架、管端对齐气缸、升降平台、集管架升降电机。
功能:对齐钢管,搬至集管架的每层钢管均用气缸挡板推动对齐;手动操作打包机完成钢管的捆扎;升降平台将打包的钢管升离集管架。
(4)移管机构:集管架传动链条电机,推出链和横移电机。
功能:集管架传动链条电机驱动辊道将打包好的钢管从升降平台升移出集管架,推出链和横移链的辊道将钢管送至下工序并吊运至堆场。
1.3 电永磁吸盘吊管原理
电永磁吸盘是指依靠永磁磁钢产生吸力,用激磁线圈对磁钢的吸力进行控制,起到吸力开关作用的吸盘。
矩形电永磁吸盘主要应用于直线移动导轨机构,可实现移动量的精确显示和自动控制,广泛应用于机床加工和仪器的精密测量。
电脉冲消耗能量极少,吸盘不会产生热变形,电永磁吸盘没有类似普通永磁吸盘磁组之类的滑动部件,其结构平稳、坚固、精度高。
自动码包机使用电磁吸盘通电通过磁力吸取钢管,然后通过丝杆上下升降和前后运动到达相应位置,断电放置钢管。
如此来回数次,将每层不同數量的钢管码成正六边形形状。
码包完毕的成品钢管通过打包钢带捆绑后,通过下层举升输送小车升高,输送辊把钢管推送至码包机外堆放。
机械布局图如图2、图3:
2 自动码包机机构
2.1 提升装置——滚珠丝杆
滚珠丝杠是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品。
滚珠丝杠是工具机械和精密机械上最常使用的传动元件,其主要功能是将旋转运动转换成线性运动,或将扭矩转换成轴向反复作用力,同时兼具高精度、可逆性和高效率的特点。
由于具有很小的摩擦阻力,滚珠丝杠被广泛应用于各种工
业设备和精密仪器。
2.2 输送行走装置——直线导轨
直线导轨可分为:滚轮直线导轨,圆柱直线导轨,滚珠直线导轨三种,是用来支撑和引导运动部件,按给定的方向做往复直线运动。
直线导轨运动的作用是用来支撑和引导运动部件,按给定的方向做往复直线运动。
像直线导轨主要是用在精度要求比较高的机械结构上,直线导轨的移动元件和固定元件之间不用中间介质,而用滚动钢球。
2.3 直线导轨选型
根据各项负载重量,初选直线导轨型号为导轨宽45mm,法兰型,标准安装螺丝孔,长度尺寸分别为1200mm和3000mm。
3 下层举升输送小车工作原理
自动码包机已经码包好的钢管因码包机机构支架阻挡,并不能使用天车龙门吊直接在原位置吊装运输走,所以本设计在码包机下层特设计配套一台自动举升输送小车,以及时将打包好的钢管输送出去,令码包机能不停机等待及时开始进入下一个码包过程。
举升输送小车通过下层的两台丝杠升降机联动,在3秒内即能将一扎码包好的钢管举升200mm,然后通过举升小车上设置的输送辊轮将钢管输出至码包机外,即能使用其他吊装工具搬运至其他地方堆放。
4 自动码包机电气控制系统
自动码包机因需控制伺服电机和整套伺服系统控制,实现快速精准的定位运行。
通过工艺流程设计PLC、HMI控制程序编程,开发出自动码包的运行程序。
使用伺服控制系统,控制大扭矩5kW伺服电机,通过减速箱和转角器传递动力至滚珠丝杆,实现机构快速精准上下吸取钢管至指定位置。
并且因为码包六角包需要,每层堆放的钢管数量不同,需要通过控制自动数数功能,达到不同规格不同数量的钢管送达至存料区。
伺服系统:
硬件:采用交流伺服驱动器与可编程逻辑控制器(PLC)作为控制系统的核心,结合人机界面,控制2台伺服电机实现正向、反向、原点回归和自动调节等动作驱动电磁吸盘装置的升降和平移准确定位。
软件:按工艺流程设计PLC、HMI控制程序。
小车脉冲系数
K=Z*M*π/4*P*i
式中:Z——齿轮齿数;M——模数;i——减速箱传动比;P——脉冲编码器每转脉冲数
例如:齿数为24,模数为6,减速箱传动比为5.1,车编码器为1000脉冲/转,则K=0.0226,在参数输入画面里输入2260,即显示为0.02260。
小车脉冲系数也可以这样简单计算出来,假设当前的系数为0.02,首先将系统复位,在平移长度的显示窗口显示为零的情况下,手动控制小车实际向右移动500毫米,若平移长度显示为550毫米,则用下式计算出新的小车脉冲系数:
K=500*0.02/550=0.01818
将0.01818输入到小车脉冲系数后,可重新校正一次。
5 结束语
本自动码包机设计制造解决了实际生产过程的问题,实现了钢管自动码包,提高了钢管码包的生产效率以及降低了工人的劳动强度。
今后我更会关注新技術新设备新工艺的发展,争取及时地掌握这些先进的知识和技术。
参考文献:
[1]朱龙根.简明机械零件设计手册(第二版)[M].机械工业出版社,2005.
[2]邓星钟.机电传动控制(第三版)[M].华中科技大学出版社,2001.
[3]机械工业部北京起重运输机械研究所.DTⅡ型固定带式输送机设计选用手册[M].冶金工业出版社,2003.
[4]陈维健,齐秀丽,肖林京,等.矿山运输与提升机械[M].徐州:中国矿业大学出版社,2007.。