行车电气原理与维护
汽车电气系统的故障诊断与维修

汽车电气系统的故障诊断与维修摘要:近年来,随着国民经济水平的日益提高,汽车已经从原本的奢侈品,逐步变成百姓日常出行的代步工具。
汽车一般都是由机械和电气系统两大部分组成,其中电气系统对于汽车而言更加重要。
若汽车电气系统出现故障,不仅会打乱人们的生活节奏,而且也会对行车安全形成巨大的威胁。
因此,提高广大驾驶员的素质,掌握汽车电气系统的故障诊断和维修方法有十分重要的意义。
关键词:汽车电气系统;故障诊断;维修方法一、前言由于人们生活水平不断提高, 对出行代步的工具———汽车的要求也越来越高。
不仅要求它具有安全、快捷、运载和操作使用方便的基本功能。
还要求环保、舒适、娱乐、灵活、优美等特性, 提出汽车应最大程度地为人们旅行居家生活提供方便。
一些新的电气设备不断地装上汽车。
作为汽车重要的组成部分,电气系统经历了低压电、高压电、计算机控制三个发展阶段。
倘若汽车的电气系统出现故障,就会对汽车的正常行驶造成影响。
当前,如何准确、迅速地将故障发生部位及原因诊断出来,并采取有效的维修方法,已成为汽车行业面临的重要课题。
二、汽车电气系统故障(一)汽车电气系统发生故障1)充电指示灯常亮。
目前,大部分汽车的充电系统中都安装有充电指示灯,当汽车点火启动之后,充电指示灯应为点亮状态,当汽车发动机的转速上升到一定程度时,指示灯则应当熄灭。
如果发动机的转速已经达到一定程度,但充电指示灯却依旧亮起,便说明汽车的充电系统存在故障。
引起此类故障的原因有两方面:①充电指示灯的电路异常,如搭铁故障灯;②汽车发动机、调节器或是相关电路存在故障,从而导致发电机无法正常工作。
2)蓄电池长期亏电。
汽车当中的电子设备逐渐增多,其中数字时钟以及二极管等设备可能会造成额外耗电。
尽管这种现象单位时间耗电量并不大,但长期发生将会引发蓄电池馈电,这也就增加了汽车电气系统存在的故障隐患。
蓄电池作为电量源头,一旦蓄电池发生故障,则可能造成汽车的整体发生故障进而无法正常运行。
行车电气控制原理图
行车电气控制原理一、电气设备和电路布置行车电气控制电路可以分为四个部份,即提升、开闭、小车、大车,它们都分别由JZR型起重机专用的电动机来拖动。
提升、开闭和小车的传动机构都装在小车上。
大车移动机构采用分别传动,即装在桥架两侧的电动机来拖动。
磁力控制盘和所有电阻安装在起重机桥架上,全部操纵器件集中装在驾驶室内。
供给起重机的三相交流电源,是由集电拖从导电轨引到驾驶室保护控制盘。
从保护盘引出到凸轮控制器或到磁力控制盘的电源线,只有三相中的两相,另一相称为公用相(即X21),直接接到电动机的定子接线端。
二、主电路和联锁控制的保护在进线电缆上安装有空气负荷开关,作为包括三相导电轨在内的整个起重机电路的短路保护。
在起重机上,所有电动机均由过电流继电器作为公路过载保护,这些过电流继电器的整定值一般整定在被保护电动机额定电流的2.25-2.5倍。
总电流过载保护的电流继电器串接在公用相,安的整定值不应超过全部电动机额定电流的1.5倍。
为了防止人身触电事故,在栏杆门、横梁等地方装有行程开关(CAK、1LAK、2LAK),以防止有人在电源没有断开的情况下,跨入行车或桥架而发生危险。
这些限位开关都与主电路上的过流继电器相串联,其中有一对触点断开,将使主接触断开。
起重机还设有零位联锁保护,即所有凸轮控制器的手柄都必须放在零位,这样才能按起动按钮使行车准备开始工作。
三、凸轮控制器的控制情况凸轮控制器是用来直接控制绕线式电机的正反向起动、运转和停止的。
在行车投入运行以前,应当将控制器手柄放在零位,然后起动总开关按钮,使总电源接通。
这一要求是利用5和7之间触点XTK来完成的,它在零位时是处在闭合状态。
小车机构的“向前”或“向后”移动是依靠凸轮控制器对调电机进线业实现的。
当手柄转到向前任何一档时,控制器的主触点X32与XD2接通,X33与XD3接通,电动机便作向前运转。
反之如手柄转到向后位置,则X32与XD3接通,X33与XD2接通,电动机反转。
行车电气控制原理图

行车电气控制原理图行车电气控制原理图是指在车辆行驶过程中,通过电气控制系统实现对车辆各种功能的控制和调节。
这些功能包括车辆的动力系统、照明系统、仪表系统、通信系统等,它们都是通过电气控制系统来实现的。
在汽车工程中,电气控制系统是一个非常重要的部分,它直接关系到车辆的安全性、舒适性和性能。
首先,我们来看一下行车电气控制系统的基本原理。
行车电气控制系统由多个部分组成,包括电源系统、传感器系统、执行器系统和控制器系统。
电源系统为整个电气控制系统提供电力,传感器系统负责采集车辆各种参数的信息,执行器系统则根据控制信号来执行相应的动作,而控制器系统则是整个电气控制系统的大脑,负责对传感器采集的数据进行处理,并生成相应的控制信号。
在行车电气控制系统中,最常见的控制器是发动机控制单元(ECU)。
发动机控制单元通过对发动机的点火、供油、排气等参数进行精确控制,可以实现对发动机的动力输出、燃油经济性和排放性能的优化。
此外,车辆的防抱死制动系统(ABS)、电子稳定程序(ESP)等也都是通过电气控制系统来实现的。
除了发动机控制单元外,车辆的照明系统也是电气控制系统的重要组成部分。
车辆的前照灯、尾灯、转向灯等都是通过电气控制系统来实现的。
在现代汽车中,还有许多新型的照明系统,如自适应前照灯、LED日间行车灯等,它们都需要通过电气控制系统来实现自动控制。
此外,车辆的仪表系统也是电气控制系统的一个重要组成部分。
车辆的仪表系统包括了速度表、转速表、油量表、水温表等,它们通过电气控制系统来实现对车辆各种参数的监测和显示。
在现代汽车中,仪表系统还包括了多媒体信息显示屏、HUD抬头显示器等,它们也都是通过电气控制系统来实现的。
最后,车辆的通信系统也是电气控制系统的一个重要组成部分。
车辆的通信系统包括了无线电、GPS导航、蓝牙电话等,它们通过电气控制系统来实现对车辆的信息交互和通信功能。
总的来说,行车电气控制系统是现代汽车中一个非常重要的部分,它直接关系到车辆的安全性、舒适性和性能。
20,5t行车主要部分电气工作原理图

20/5t桥式主要部分电气工作原理20/5t桥式起重机经常移动的。
因此要采用移动的电源线供电,一般采用软电缆供电,软电缆可随大、小车的滑触线通过生产车间中常用的20/5t桥式起重机,它是一种用来吊起或放下重物并使重物在短距离内水平移动的起重设备,俗称吊车、行车或天车。
起重设备按结构分,有桥式、塔式、门式、旋转式和缆索式等多种,不同结构的起重设备分别应用于不同的场合。
生产车间内使用的是桥式起重机,常见的有5t、10t单钩和15/3t、20/5t双钩等。
下面以20/5t双钩桥式起重机为例分析一下20/5t桥式起重机控制线路。
20/5t桥式起重机主要由主钩(20t)、副钩(5t)、大车和小车等四部分组成。
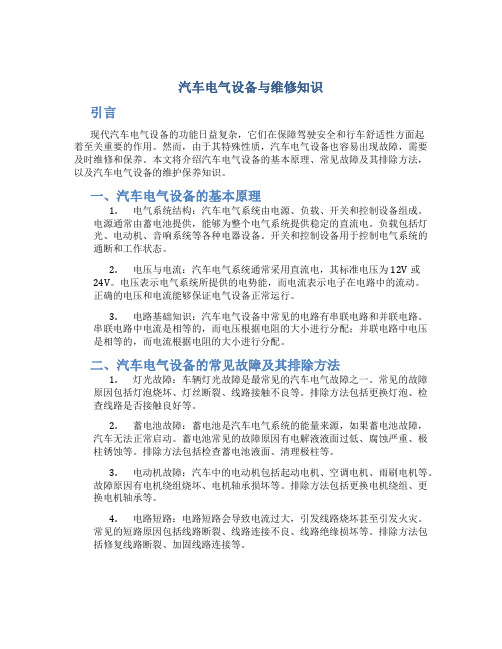
如图10-17所示是20/5t桥式起重机的外形结构图。
1-驾驶室 2-辅助滑线架 3-交流磁力控制器4-电阻箱5-起重小车 6-大车拖动电动7-端梁 8-主滑线 9-主梁图10-17 桥式起重机外形结构图20/5t桥式起重机由五台电动机组成,其主要运动形式分析如下:大车的轨道设在沿车间两侧的柱子上,大车可在轨道上沿车间纵向移动;大车上有小轨道,供小车横向移动;主钩和副钩都安装在小车上。
交流起重机的电源为380V。
由于起重机工作时是电刷引入起重机驾驶室内的保护控制盘上,三根主滑触线是沿着平行于大车轨道方向敷设在车间厂房的一侧。
提升机构、小车上的电动机和交流电磁制动器的电源是由架设在大车上的辅助滑触线(俗称拖令线)来供给的;转子电阻也是通过辅助滑触线与电动机连接的。
滑触线通常用圆钢、角钢、V形钢或工字钢轨制成。
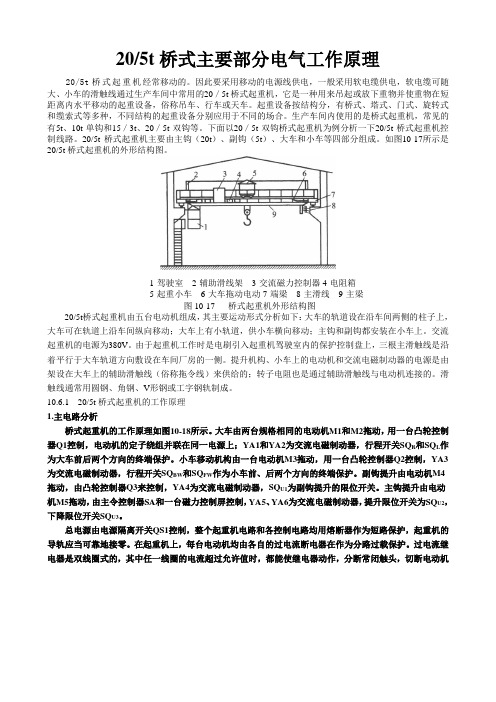
10.6.1 20/5t桥式起重机的工作原理1.主电路分析桥式起重机的工作原理如图10-18所示。
大车由两台规格相同的电动机M1和M2拖动,用一台凸轮控制器Q1控制,电动机的定子绕组并联在同一电源上;YA1和YA2为交流电磁制动器,行程开关SQ R和SQ L作为大车前后两个方向的终端保护。
小车移动机构由一台电动机M3拖动,用一台凸轮控制器Q2控制,YA3为交流电磁制动器,行程开关SQ BW和SQ FW作为小车前、后两个方向的终端保护。
汽车电路与电气系统的检测与维修
汽车电路与电气系统的检测与维修摘要:随着汽车电控系统装备日趋复杂及应用渐广,在检测和维修过程中可以同时运用多种策略,以降低维修成本,提高检测和维修效率。
这就要求检测者和维修者熟知汽车的电路及其电路结构、电路图、电路基本装置等,对汽车电路的相关基础廖记于心,从而顺利发现汽车电路故障,开展维修工作的关键。
关键词:汽车电路;电气系统;检测;维修前言在汽车电路与电气系统的检测与维修中,首先要明确了解汽车电路,熟知汽车电路维修要点,才能使汽车检修方法简单化。
当电气系统发生故障时,汽车的正常工作和行车安全就会收到影响,如何准确地诊断出故障所在的部位及引起故障的原因,并对其进行维修,是当前汽车行业的主要研究的一个重点。
一汽车电气系统故障诊断策略1.1硬故障比如电气元件损坏、导线短路、线路断裂等;1.2 软故障电控单元设置错误,造成电气系统不能正常工作。
常用的电气系统故障诊断方法有①观察法。
当汽车电气系统发生故障时,可能会出现异响、烧焦味、冒烟、高温、车灯闪烁或不亮。
这些都是需要人们仔细去观察、感知;②换件比较法。
当我们怀疑电气系统的某一部件出现问题时,可用正常的部件对其进行更换,若更换后,电气系统可以正常工作,就说明这一部件确实是出现故障;若更换部件后,电气系统仍不能正常工作,证明原部件是正常;③电流表诊断法。
通过将电流表串联或并联在电路中,可以判断电气系统是否存在短路或断路;④短路试验法。
利用螺丝刀或导线将某段电路连接在一起,观察仪表指针的摆动情况,判断这段电路是否存在断路;⑤线路直通法。
用一段导线将电源和用电设备连接起来,判断线路、开关或保险丝是否存在故障;⑥断路试验法。
当怀疑某段线路搭铁时,可以尝试将该段线路断开,来判断其是否搭铁;7)⑦搭铁试火法。
搭铁试火诊断法是一种最为简便、常见的汽车电路诊断方法,它的主要原理是利用用电设备与金属部分链结构产生的火花强弱来判断故障。
搭铁试火的诊断方法分为直接搭铁和间接搭铁两种。
汽车电气设备构造与维修

汽车电气设备构造与维修
灯泡发光原理
传统钨丝灯泡
灯丝会安装在密封的玻璃灯泡内防止高温氧化。但 在高温工作条件下,金属钨会升华,并在温度较 低的灯泡玻璃上凝结,导致透明度严重降低,照 明效率下降,钨丝挥发严重时会断裂,完全损坏 。因此,灯泡内充满卤素气体的灯炮出现了。
PPT文档演模板
汽车电气设备构造与维修
汽车灯光控制系统
车内灯:
l 不同汽车车内灯的数量和安装位置有所不同。
l 一般车内照明灯有:
顶灯、仪表灯、阅读灯、化妆镜灯、内把手 灯、烟灰缸灯、杂物箱灯、行李箱灯等。
l 一般车内信号灯有:
转向提示灯、危险警告灯、车门警报灯和各 种信号指示灯。
l 照明灯多用12V的 3-8W白炽灯泡。
信号灯多用12V的LED发光二极管。 l PPT文档演模板
转向灯、危险警告灯
PPT文档演模板
汽车电气设备构造与维修
•车灯自动控制功能
(1)车后灯警告系统
l 汽车行驶中,当尾灯或制动灯不亮时,驾驶员 无法及时发现,对汽车安全行驶非常不利。如 果汽车上安装了车后灯警告系统,可以通过组 合仪表中的警告指示灯通知驾驶员:尾灯和制 动灯泡系统有了故障,应及时采取措施避免危 险情况的发生。
PPT文档演模板
汽车电气设备构造与维修
配光镜
PPT文档演模板
汽车电气设备构造与维修
灯泡的分类
目前,汽车前照灯的灯泡有白炽灯泡、卤钨灯泡、 和高强度气体放电灯泡等。
l 充气灯泡若充入的是惰性气体即为白炽灯泡。 若充入的是卤族元素即为卤钨灯泡。
l 高强度气体放电灯泡就是HID灯泡,或叫氙气大 灯。
PPT文档演模板
PPT文档演模板
汽车电气设备构造与维修
行车电气
第八章天车的电气线路及原理第二节主电路主电路(动力电路)是用来驱动电动机工作的电路,它包括电动机绕组和电动机外接电路两部分。
外接电路有外接定子和外接转子电路,简称定子电路和转子电路。
定、转子电路根据控制电动机功率的不同,又分为接触器控制和凸轮控制器控制。
定子电路由接触器控制,转子电路由凸轮控制器控制。
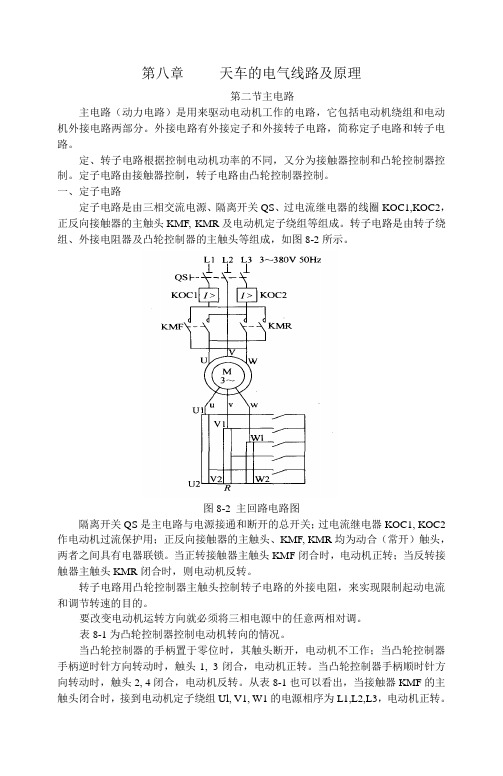
一、定子电路定子电路是由三相交流电源、隔离开关QS、过电流继电器的线圈KOC1,KOC2,正反向接触器的主触头KMF, KMR及电动机定子绕组等组成。
转子电路是由转子绕组、外接电阻器及凸轮控制器的主触头等组成,如图8-2所示。
图8-2 主回路电路图隔离开关QS是主电路与电源接通和断开的总开关;过电流继电器KOC1, KOC2作电动机过流保护用;正反向接触器的主触头、KMF, KMR均为动合(常开)触头,两者之间具有电器联锁。
当正转接触器主触头KMF闭合时,电动机正转;当反转接触器主触头KMR闭合时,则电动机反转。
转子电路用凸轮控制器主触头控制转子电路的外接电阻,来实现限制起动电流和调节转速的目的。
要改变电动机运转方向就必须将三相电源中的任意两相对调。
表8-1为凸轮控制器控制电动机转向的情况。
当凸轮控制器的手柄置于零位时,其触头断开,电动机不工作;当凸轮控制器手柄逆时针方向转动时,触头1, 3闭合,电动机正转。
当凸轮控制器手柄顺时针方向转动时,触头2, 4闭合,电动机反转。
从表8-1也可以看出,当接触器KMF的主触头闭合时,接到电动机定子绕组Ul, V1, W1的电源相序为L1,L2,L3,电动机正转。
当接触器KMR的主触头闭合时,电动机定子绕组U1, V1, Wl的电源相序为I3, L2, Ll,电动机反转。
表8-1凸轮控制器控制电动机转向的情况二、转子电路转子电路是指通过凸轮控制器主触头的分合来改变转子电路外接电阻的大小而实现限制起动电流及调速的电路。
如图8-2所示,转子电路的外接电阻是由三相电阻器组成的,三相电阻的出线端U2, V2, W2连接在一起,另外三个出线端U1, vi , Wl用三根导线经电刷一集电环分别与转子绕组u、v, w相连接。
行车介绍及电气设计原理学习教材
电磁抱闸制动器断电制动控制的电路图
1-线圈;2-衔铁;3-弹簧;4-闸轮;5-闸瓦;6-杠杆
装备电气公司
18
四、电气控制元件Com Lopgaony
(2)电磁抱闸制动器通电制动控制线路
电磁抱闸制动器通电制动控制的电路图
1-弹簧;2-衔铁;3-线圈;4-铁心;5-闸轮;6-闸瓦;7-杠杆
电压继电器的符号
匝数多、元件
2. 电气控制柜元件介绍
③.断相与相序保护继电器
XJ3系列断相与相序 保护继电器,在三相交流 电路中作过欠压、断相保 护及不可逆转传动设备中 作相序保护,具有性能可 靠、适用范围广、使用方 便等特点。
装备电气公司
36
四、电气控制元件
门式起重机与桥式起重机的主要区别在于,在主 梁的两端有两个高大支撑腿,沿着地面上的轨道运 行。工厂内一般称龙门吊。
装备电气公司
7
单梁桥式起重机
双梁桥式起重机
桥式起重机
装备电气公司
8
单主梁吊钩门式起重机
装备电气公司
9
二、桥式起重机的结构及运动形式
桥式起重机结构示意图
装备电气公司
10
二、桥式起重机的结构及运动形式
⑦、要有完备的电气保护与联锁环节。
装备电气公司
14
四、电气控制元件
电气控制元件主要分为两大部分
第一部分是现场行车安装的元器件,主 要由电磁抱闸器、凸轮控制器、主令控 制器等
第二部分主要是安装在电气控制柜内, 电气控制柜主要由主起升配电箱和主配 电照明箱两个柜体组成。安装在柜体内 电气元件主要有断路器、接触器、时间 继电器、相序保护器、过流继电器、变 压器等。
汽车电气设备与维修知识
汽车电气设备与维修知识引言现代汽车电气设备的功能日益复杂,它们在保障驾驶安全和行车舒适性方面起着至关重要的作用。
然而,由于其特殊性质,汽车电气设备也容易出现故障,需要及时维修和保养。
本文将介绍汽车电气设备的基本原理、常见故障及其排除方法,以及汽车电气设备的维护保养知识。
一、汽车电气设备的基本原理1.电气系统结构:汽车电气系统由电源、负载、开关和控制设备组成。
电源通常由蓄电池提供,能够为整个电气系统提供稳定的直流电。
负载包括灯光、电动机、音响系统等各种电器设备。
开关和控制设备用于控制电气系统的通断和工作状态。
2.电压与电流:汽车电气系统通常采用直流电,其标准电压为12V或24V。
电压表示电气系统所提供的电势能,而电流表示电子在电路中的流动。
正确的电压和电流能够保证电气设备正常运行。
3.电路基础知识:汽车电气设备中常见的电路有串联电路和并联电路。
串联电路中电流是相等的,而电压根据电阻的大小进行分配;并联电路中电压是相等的,而电流根据电阻的大小进行分配。
二、汽车电气设备的常见故障及其排除方法1.灯光故障:车辆灯光故障是最常见的汽车电气故障之一。
常见的故障原因包括灯泡烧坏、灯丝断裂、线路接触不良等。
排除方法包括更换灯泡、检查线路是否接触良好等。
2.蓄电池故障:蓄电池是汽车电气系统的能量来源,如果蓄电池故障,汽车无法正常启动。
蓄电池常见的故障原因有电解液液面过低、腐蚀严重、极柱锈蚀等。
排除方法包括检查蓄电池液面、清理极柱等。
3.电动机故障:汽车中的电动机包括起动电机、空调电机、雨刷电机等。
故障原因有电机绕组烧坏、电机轴承损坏等。
排除方法包括更换电机绕组、更换电机轴承等。
4.电路短路:电路短路会导致电流过大,引发线路烧坏甚至引发火灾。
常见的短路原因包括线路断裂、线路连接不良、线路绝缘损坏等。
排除方法包括修复线路断裂、加固线路连接等。
三、汽车电气设备的维护保养知识1.定期检查蓄电池:定期检查蓄电池的液面和极柱是否干净。
行车主要部分电气工作原理图.docx

.20/5t桥式主要部分电气工作原理20/5t桥式起重机经常移动的。
因此要采用移动的电源线供电,一般采用软电缆供电,软电缆可随大、小车的滑触线通过生产车间中常用的20/5t 桥式起重机,它是一种用来吊起或放下重物并使重物在短距离水平移动的起重设备,俗称吊车、行车或天车。
起重设备按结构分,有桥式、塔式、门式、旋转式和缆索式等多种,不同结构的起重设备分别应用于不同的场合。
生产车间使用的是桥式起重机,常见的有5t、10t 单钩和 15/ 3t、20/ 5t 双钩等。
下面以 20/ 5t 双钩桥式起重机为例分析一下20/5t 桥式起重机控制线路。
20/5t 桥式起重机主要由主钩(20t )、副钩( 5t)、大车和小车等四部分组成。
如图10-17 所示是 20/5t 桥式起重机的外形结构图。
1- 驾驶室2- 辅助滑线架3- 交流磁力控制器4- 电阻箱5- 起重小车6- 大车拖动电动7- 端梁8- 主滑线9- 主梁图 10-17桥式起重机外形结构图20/5t 桥式起重机由五台电动机组成,其主要运动形式分析如下:大车的轨道设在沿车间两侧的柱子上,大车可在轨道上沿车间纵向移动;大车上有小轨道,供小车横向移动;主钩和副钩都安装在小车上。
交流起重机的电源为380V。
由于起重机工作时是电刷引入起重机驾驶室的保护控制盘上,三根主滑触线是沿着平行于大车轨道方向敷设在车间厂房的一侧。
提升机构、小车上的电动机和交流电磁制动器的电源是由架设在大车上的辅助滑触线(俗称拖令线)来供给的;转子电阻也是通过辅助滑触线与电动机连接的。
滑触线通常用圆钢、角钢、V形钢或工字钢轨制成。
10.6.1 20/5t 桥式起重机的工作原理1.主电路分析桥式起重机的工作原理如图10-18 所示。
大车由两台规格相同的电动机M1 和 M2 拖动,用一台凸轮控制器 Q1 控制,电动机的定子绕组并联在同一电源上;YA1 和 YA2 为交流电磁制动器,行程开关SQ R和 SQ L作为大车前后两个方向的终端保护。
20,5t行车主要部分电气工作原理图
20/5t桥式主要部分电气工作原理20/5t桥式起重机经常移动的。
因此要采用移动的电源线供电,一般采用软电缆供电,软电缆可随大、小车的滑触线通过生产车间中常用的20/5t桥式起重机,它是一种用来吊起或放下重物并使重物在短距离内水平移动的起重设备,俗称吊车、行车或天车。
起重设备按结构分,有桥式、塔式、门式、旋转式和缆索式等多种,不同结构的起重设备分别应用于不同的场合。
生产车间内使用的是桥式起重机,常见的有5t、10t单钩和15/3t、20/5t双钩等。
下面以20/5t双钩桥式起重机为例分析一下20/5t桥式起重机控制线路。
20/5t桥式起重机主要由主钩(20t)、副钩(5t)、大车和小车等四部分组成。
如图10-17所示是20/5t桥式起重机的外形结构图。
1-驾驶室2-辅助滑线架3-交流磁力控制器4-电阻箱5-起重小车6-大车拖动电动7-端梁8-主滑线9-主梁图10-17 桥式起重机外形结构图20/5t桥式起重机由五台电动机组成,其主要运动形式分析如下:大车的轨道设在沿车间两侧的柱子上,大车可在轨道上沿车间纵向移动;大车上有小轨道,供小车横向移动;主钩和副钩都安装在小车上。
交流起重机的电源为380V。
由于起重机工作时是电刷引入起重机驾驶室内的保护控制盘上,三根主滑触线是沿着平行于大车轨道方向敷设在车间厂房的一侧。
提升机构、小车上的电动机和交流电磁制动器的电源是由架设在大车上的辅助滑触线(俗称拖令线)来供给的;转子电阻也是通过辅助滑触线与电动机连接的。
滑触线通常用圆钢、角钢、V形钢或工字钢轨制成。
10.6.1 20/5t桥式起重机的工作原理1.主电路分析桥式起重机的工作原理如图10-18所示。
大车由两台规格相同的电动机M1和M2拖动,用一台凸轮控制器Q1控制,电动机的定子绕组并联在同一电源上;YA1和YA2为交流电磁制动器,行程开关SQ R和SQ L作为大车前后两个方向的终端保护。
小车移动机构由一台电动机M3拖动,用一台凸轮控制器Q2控制,YA3为交流电磁制动器,行程开关SQ BW和SQ FW作为小车前、后两个方向的终端保护。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
桥式起重机(行车)电气原理与维修桥式起重机又称行车,是工厂重要起重设备。
行车的使用,将人力难以挪动的重物在一定的空间范围内,比较容易地移动了位置。
从电气原理上说,桥式起重机十分典型。
我们梅山矿业公司有众多的电动单梁吊、桥式起重机,为了维护好这些设备,我们就以其中最典型复杂的32/3T双钩头起重机为例,述其一般原理与维护常识。
1行车结构及作用1.1行车电器组成:行车一般有主钩副钩提升、大车小车移动。
主钩负责重负荷提升,副钩提升重量较小,起辅助起吊作用,吊些小件比较灵活。
电气主要有电机、调速电阻、凸轮控制器、保安箱、保护装置以及照明、电铃等辅助装置。
1.2行车主回路:包括钩头控制、大小车控制。
1.2.1大车主回路:见下图1-1:图 1-1 大车主回路上图中,我们可以看出大车有两个电动机(一般都这样),分别安装在大梁两端(有的大车一个电机)。
大车电动机和其他行车电动机一样都是绕线式。
这有许多好处:行车经常点动,经常带负荷启动,串电阻启动时力矩大,电动机方向便于切换,带负荷启动不困难。
另外,在运行中,行车会不断改变速度,串电阻绕线式电动机,正具备这一优点。
上图中X61-X63为电源进线,左边KD为凸轮控制器换向,右边KA1、KA2为遥控时接触器换向,1LJD、2LJD为过流保护继电器,1Z1D、1Z2D、1Z3D为电动机转子出线,接外部调速电阻。
电机调速通过凸轮控制器KD进行顺序切换,在遥控式则通过KA3 、KA4、 KA5、KA6切换。
1YTD为电液制动器,得电松闸,失电抱闸。
1.2.2小车主回路:见图1-2:图 1-2 小车主回路上图中X21、D2、X23为电源进线,右边KX 为凸轮控制器换向,右边KB1、KB2为遥控时接触器换向,1LJX 、2LJX 为过流保护继电器, Z1X 、Z2X 、Z3X 为电动机转子出线,接外部调速电阻。
电机调速通过凸轮控制器KX 进行顺序切换,行车处在遥控式则通过KB3 、KB4、 KB5、KB6切换。
YTX 为电磁制动器,得电松闸,失电抱闸。
1.2.3副钩主回路:见图1-3:在图3中,X21、D2、X23为电源进线, KF 为副钩凸轮控制器换向,右边KC1、KC2为遥控时接触器换向,1LJF 、2LJF 为过流保护继电器, Z1F 、Z2F 、Z3F 为电动机转子出线,接外部调速电阻。
电机调速通过副钩凸轮控制器KF 进行顺序切换,行车处在遥控式则通过KC3 、KC4、 KC5、KC6切换。
1TF 为制动器。
钩头电机制动采用3相交流电动机液压制动,钩头电机换向同时,抱闸电机得电,泵出油流,抱闸活塞杆图1-3 副钩主回路 上海梅山矿业有限公司扬州思创电气有限公司陈宇黄伟伟比例张次张数.A3遥控电气原理图质量图号名称工作级别跨度起重量项目日期图幅文件号图形输入核对抬起,副钩松闸,失电时,闸重锤下落,抱住电机输出轴靠背轮。
1.2.4主钩电机主回路:见图1-4:图 1-4 主钩主回路(供参考)在图4中,X21、D2、X23为电源进线, KZ为主钩凸轮控制器换向,右边KD1、KD4为遥控时接触器换向,1LJZ、2LJZ为过流保护继电器, Z1Z、Z2Z、Z3Z为电动机转子出线,接外部调速电阻。
电机调速通过主钩凸轮控制器KZ进行顺序切换,行车处在遥控式则通过KD2 、KD3、 KD5、KD6切换。
1TZ 为制动器。
钩头电机制动也采用3相交流电动机液压制动,钩头电机换向同时,抱闸电机得电,泵出油流,抱闸活塞杆抬起,主钩松闸,失电则闸重锤下落,抱住电机输出轴靠背轮。
1.3保护盘见图1-5:保护盘将大车小车主副钩过流保护,端梁门、上扶梯门、进桥面门保护,凸轮控制器零位保护,大小车行程保护,主副钩头过卷保护等集合在保护盘的电源主接触器线圈回路里,一旦这些保护有一处动作,主接触器XC立即断电。
图 1-5 保护回路1.4习题1)从电气上看,行车有几大部分? 2)大车主回路结构是怎样的?怎么切换? 3)主副钩有哪些保护?4)保护盘上对行车实施了那些保护? 2行车控制系统原理2.1主钩头控制:行车的起吊主钩控制与其他功能电机控制有较大不同。
主钩电机容量较大(至少3OKW 以上),所以不得不让凸轮控制器去控制一个装有多只接触器的"磁力控制盘",或者叫控制盘(柜),再由该盘去控制电机的运行和速度调整。
主钩控制盘见下图2-1: 图 2-1 主钩控制电路主钩凸轮控制器在零位时,其触点K1闭合,在各安全保护正常情况下,电源接触器LYJS 得电并自保,做好工作准备,四个时间继电器充电做切换准备。
假定主钩向上提升,当主钩凸轮控制器在上升1档时,其触点K3、K4、K8、K11闭合,上升接触器ZCS 得电给出主钩正序,同时通过一步延时继电器敞开触点瞬时闭合自保,电机启动,预备继电器在上升接触器得电其触点接通两步延时后线圈得电接通电机切除一部分电阻一步加速。
主钩凸轮控制器打到2档,K4、K5、K8、K11维持闭合,对应接触器维持工作K9闭合。
电机一步加速上后,三步延时继电器断电闭点延时闭合,于是两步加速2JSCS得电,电机再切除一部分电阻加速,2JSCS串在延时继电器4LSJS回路中的常闭点断开,做好三步加速准备。
主钩凸轮控制器打到3档K4、K5、K8、K9、K11维持闭合,K10闭合,延时继电器4LSJS 延时结束,三步加速3JSCS得电,主触点闭合电机全部加速完成。
处在遥控时遥控器的接触器KD1-KD6取代K4、K5、K8、K9、K10、K11实施切换,实现钩头向上提升。
主钩下降时,启动加速同钩头上升类似,但在主钩头下降时,控制方面必须强调的是:由于下放的重物份量大,万一抱闸制动配合不好,就可能造成工件等重物下放的失控,造成重物坠地摔坏、伤人等事故发生。
因此提升重量l5T以上的行车主钩在下降控制电路设计上,其钩头凸轮控制器下降一档仍采用了上升的相序,下降二档处于制动状态,只是此两档时转子串的电阻较大,结果使电机的维持上升的电磁转矩MD小于下降的重量形成的负载载矩Mz,于是电机处于"反接倒拉制动状态,重物下降的速度被限制较低范围内,提高了安全可靠性。
2.2副钩头控制:副钩电机是由凸轮控制器直接完成运行方向的切换的,加减速也是由凸轮控制器直接对电机转子外接非对称电阻进行短接以实现调速和改善启动性能目的。
在原理图档位闭合表上可清楚看出。
2.3大车小车控制:我们看到行车大车(负责左右横向的行走),小车(负责前后纵向的行走)。
大车、小车、也都是由凸轮控制器直接完成运行方向的切换的,且加减速也同样是由凸轮控制器直接对电机转子外接非对称电阻进行短接以实现调速和改善启动性能目的。
其中大车的两个电机1Dd、2Dd是公用一个凸轮控制器KD。
两电机在运行方向切换上,共用触点,而在电阻切换上却是各用各的触点,两大车电机各有自己的调速电阻箱。
小车的控制和副钩相似。
2.4保护盘:在行车电路中,保护盘是核心部分,多种保护确保行车的安全运行。
2.4.1各电机的过流保护:控制电路的短路保护都在其中;各电机的主电源也都从其中取出。
行车的过流保护采用的是过流继电器,它具有一定的时限特性,过电流的数值越大,动作越快,同时具有自恢复特性。
小车、副钩、主钩的过流保护都设在控制器前端,大车的过流保护设在控制器后端。
它们中任一动作,主电源接触器XC将立即掉电。
2.4.2大小车终端限制保护:在行车电路中,纵横两个运行方向终端的限制由1XD、2XD和1XX、2XX及XS及KS实现。
其中1XX、2XX是小车行走超限保护,1XD、2XD是大车的超限保护,XS是副钩的上过卷限位,KS是主钩的上过卷限位。
这些保护行程开关和几个凸轮控制器的方向连锁触点一道实施终端极限保护。
大车、小车运行方向终端一旦超限,主副钩上升超过上限,KC将立即掉电。
2.4.3零位保护:行车的各控制器必须具有零位保护,在图中小车控制器KX、副钩控制器KF、大车控制器KD的零位串在电源接触器KM的起动回路中,防止凸轮不在零位时送电造成误动作。
2.4.4门、安全窗和回栏门的电气连锁保护:在图中的1AK、2AK、3AK是行车的门、安全窗和回栏门的电气连锁开关,它们任一打开,KM将掉电或者根本就无法送电。
除此以外,XC的双断点也是一种设备、人身安全保护。
2.5遥控时增加的电路,见图2-2:由于这台行车改为两地操作即:可以驾驶室操作,也可以遥控操作,在行车电路增加了一个控制柜,用接触器取代了凸轮控制器。
在图2-2中,遥控装置的输出开关点就是控制这些接触器线圈,使之按照凸轮控制器控制顺序去控制行车。
我们并不要知道遥控器内部微处理处理过程原理,只要知道它们的开关量对应的是那些接触器就可以。
而遥控器操作摇杆、开关、按钮也是试开几次就清楚的,不再赘述。
图 2-2 遥控时接触器控制电路行车电路经典传统、规范,还有一些照明、风扇、警铃电路,具体原理许多书中都有详细介绍,一看就明白,亦不赘述。
2.6习题1)主钩下降很讲究,在1、2当时是什么状态,空钩头时摆在这两挡,会出现什么情况?2)大小车终端限位有那些元件组成,怎样起保护作用的?3)保护柜中过流保护是什么元件,具有什么特点?3行车的主要故障判别和处理3.1按下启动按钮SB主接触器不吸。
可能原因有:1)控制电路短路保护FU,熔断或接触不良。
2)紧急开关可能长期使用无法合紧。
3)有某一凸型控制器不在零位。
4)过流继电器的联锁微动开关坏了。
5)入口安全门、窗、围栏门有一处没关好或行程开关坏了。
6)接触器XC本身线圈断线。
7)零位保护部分和安全联锁部分的连线断了。
3.2主接触器送电后不能自保可能原因有:1)主接触器KM自保触点接触不良。
2)凸轮控制器联锁触点接触不良。
3)各终端位置保护开关接触不良。
3.3控制器合上档位,但电机不转可能原因有:1)电机缺相。
2)转子端环与碳刷接触不良。
3)转子电路有断线。
3.4电机出力不足,提升钩头提升重物时费力可能原因有:1)转子回路串的电阻并联处断线。
2)同故障3中的可能原因(2)相同。
3.5电磁包闸打开时或接触器得电时嗡嗡响声非常大,且持续不断。
可能原因有:1)衔铁接触面污垢严重。
"2)动衔铁被卡住不能吸到位。
3)静衔铁上的短路环开路。
4)线圈吸合电压较低。
3.6行车大车行驶时接触器XC脱开,主电路失电。
可能原因,1)电磁包闸太紧;带闸运转,过流动作。
2)终端保护的限位开关触头吸合力不够,接触不好,行车时的抖动使XC断电。
以上例举的是行车经常发生的故障以及它们的判断参考结果,仅供参考,在实际维护中只要我们对行车的电气原理掌握深透,故障的处理是不难的。
3.7行车的保养常识机械电气常用设备使用寿命的长短、使用的效果如何与维护保养工作关系密切。