810、811蜘蛛机器人制作说明
蜘蛛仿形机械手设计说明书

蜘蛛仿形机械手设计说明书.鄂东职业技术学院设计说明蜘蛛仿形机械手设计说明书作品名称: 仿形机械手小组成员:指导老师:时间:二О一二年十月七日 , 十一月十日共五周 ..目录摘要 ..................................................................... .. (3)Abstract ............................................................... ............................. 4 一、研究背景 ..................................................................... . (5)1.1(现实情况 ..................................................................... .. (5)1.2机器人发展过程 ..................................................................... .. (6)1.3.机械手在生产线上的应用 ..................................................................... . (8)1.4今后我国机械手市场发展趋势 ..................................................................... .................... 9 二、机械手设计过程 ..................................................................... (11)3.1 设计理论 ..................................................................... (11)3.2 分工设计 ..................................................................... (11)3.2.1、连杆的设计 ..................................................................... (11)3.2.2、齿轮箱 ..................................................................... .. (12)3.2.3、执行件 ..................................................................... .. (13)3.2.4、支柱 ..................................................................... (13)3.2.5、液压缸 ..................................................................... .. (14)3.3 总装 ..................................................................... .. (15)3.3.1、齿轮箱装配 ..................................................................... (15)3.3.2连杆与传动件的装配 ..................................................................... .. (15)3.3.3执行件与主体的装配 ..................................................................... .. (16)3.3.4连杆的装配 ..................................................................... ....................................... 16 四、零件加工 ..................................................................... .. (17)4.1零件的分析 ..................................................................... .. (17)4.2数控编程...................................................................... .. (17)4.3工艺卡片...................................................................... .. (18)4.4功能参数...................................................................... .. (21)4(5刀具轨迹 ..................................................................... (30)4.6 NC数据 ..................................................................... . (32)总结 ..................................................................... .................. 34 参考文献 ..................................................................... . (36)..摘要近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。
死蜘蛛机械手等

/责编:韦力/蜘蛛的负重能力非常强大,它们可以承载大于自身重量的物体。
人们想制造一个像蜘蛛一样小但功能类似的机器人是极为困难的。
近日,美国莱斯大学的几位工程师带来了一项听起来有些“离谱”的发明:直接把死蜘蛛改造成迷你机械手,并控制它完成一系列抓握物体的任务。
与人类不同,蜘蛛是通过体内的液压系统控制腿的伸展,研究者们正是直接利用了这套现成的系统。
他们将狼蛛冷冻死之后,在其头胸部刺入针头,从而让液压系统连通外界,然后再用强力胶将针眼周围密封住。
接下来,只要注入少量空气改变压强,就能控制死蜘蛛的腿做出伸缩运动。
实验显示,“死蜘蛛机械手”能抓起各种形状不规则的小物体,最大承重达到自身重量的130%。
目前,这项研究成果已发表在Advanced Science 上。
研究过程及实验步骤目前,超声波成像还得依赖一些笨重的、一般只有医院才有的专业设备。
不过最近,美国麻省理工学院的一项研究成果有望打破这一局面,他们开发出了一种像创可贴一样的可穿戴的超声波贴片。
这种超声波贴片只有一张邮票这么大。
研究者以微型压电换能器阵列作为超声探头,并用弹性水凝胶替代涂抹式的超声耦合剂,制作出了这种小型超声波贴片。
把它贴在皮肤上,最多可以工作48小时,持续对人体内的血管、肌肉、消化道或心脏进行高质量超声波成像。
经测试,受试者静坐、站立或慢跑时,设备都能正常工作。
目前,研究团队正在努力使贴片以无线方式运行,并开发基于人工智能的软件算法,以更好地解释和诊断贴片获得的图像。
研究人员设想,这种超声波贴片未来可被患者和消费者成包购买,不仅能用来监测人体的各种内脏器官,还能监测肿瘤的进展,以及子宫内胎儿的发育情况等。
Euthanize spiderabFabricationc Necrobotic gripperGlueNeedleSelf -sealingmechanism10CCopyright ©博看网. All Rights Reserved.日前,美国的希望之城医学中心公布了全球第4个被治愈的艾滋病病例。
智能蜘蛛机器人的设计与实现
【年(卷),期】2018(000)001
【总页数】3页(P104-106)
【关键词】蜘蛛机器人;平衡系统;实时图像传输系统;避障系统
【作 者】刘宇航;石春源;陆绍鑫;薛恩鹏
【作者单位】哈尔滨理工大学,哈尔滨150080;哈尔滨理工大学,哈尔滨150080;哈尔滨理工大学,哈尔滨150080;哈尔滨理工大学,哈尔滨150080
[14]谢志浩,柯文德.仿生蜘蛛型机器人体系结构研究[J].广东石油化工学院学报,2015(1):56-59.
[15]施文灶,王平.仿生蜘蛛机器人的设计与实现[J].电子科技,2013(3):90-92.
蜘蛛机器人舵机的选择需要考虑质量和最大转矩,其受力分析如图3所示。蜘蛛机器人上腿由A舵机连接,上腿与中腿由B舵机连接,中腿和下腿由C舵机连接。其中,上腿、中腿、下腿的质量分别用m1、m2、m1g为了使舵机能够承受蜘蛛的重量,根据牛顿第三定理中力和力矩的关系,得出腿的质量和长度关系如表1所示。
在蜘蛛机器人行走过程中,为了避免腿部之间发生碰撞,腿摆动时需要选择合适的角度,通过多次实验,得出运动控制时最佳的摆动角度,如表2所示。
本文以蜘蛛为仿生原型,设计并实现了一种智能蜘蛛机器人。以蜘蛛机器人为基础,进行了机器人的结构基础、功能方面的研究,完成了对其机械结构、硬件电路的设计,探究了在直线行走、转弯、避障以及实时图像传输方面的实现方法。实验结果表明,结构设计合理可行,蜘蛛机器人的行走、避障等动作体现出了良好的灵活性和协调性,具有良好的人机交互功能。蜘蛛机器人凭借其广阔的应用前景和实用性能,未来将会在航天、军事等领域发挥重要作用。
蜘蛛型玻璃清洗机器人的设计
蜘蛛型玻璃清洗机器人的设计作者:张裕佳伍伟来源:《软件工程》2016年第01期摘要:针对当前人工清洗玻璃时,存在危险性高、难度大、效率低等问题,设计了玻璃清洗机器人,具体阐述了各个组成部分的结构和工作原理,给出了结构框图和部分电路原理图,最后通过实验对机器人在玻璃壁面上的行走适应情况以及壁面清洗效果进行了测试,从测试情况可以看出,该机器人具有重量轻、体积小、清洗效果好、控制方便等特点,有较好的市场推广和应用价值。
关键词:清洗;机器人;蓝牙;吸附;设计中图分类号:TN710 文献标识码:A1 引言(Introduction)随着经济的不断发展,许多高楼大厦平地而起,但同时又带来了一个问题,那就是大厦玻璃的清洗,目前还主要靠人工清洗[1],可是人工清洗危险性很高、操作繁琐、难度较大、效率低[2,3],本文设计了一种玻璃清洗机器人,能代替人工进行玻璃清洗工作,经测试获得了较好的效果,有一定的实用价值。
2 整体硬件设计(Design of the overall hardware)设计的整体框图如图1所示,它主要由地面站(手机或电脑等有蓝牙模块的装置)、HC-06蓝牙模块、89C52单片机为核心的控制电路、以电磁阀和真空产生器为驱动模块和由两个双出杆双作用气缸和8个真空吸盘气缸的运动系统组成。
其中使用手机蓝牙串口客户端发出指令信息到和51单片机连接的蓝牙模块,单片机判断指令并执行相应子程序,发出相应的控制信号控制电磁阀的开关从而达到控制与之连接的气缸的伸出抽入,以达到机器人上、下、左、右运动的目的。
在这个移动过程中,由机器人身上所带有的清洗刷进行移动擦洗,安全保护系统主要是保证物品升降移动正常运行,最大限度的降低意外事故的发生几率。
图1 整体设计框图Fig.1 The overall design diagram3 控制芯片的选择(The choice of control chip)考虑STC89C51RC/RD+系列单片机具有宽工作电压3.4V—6V,超强抗干扰、高速、低功耗、无法解密、指令代码完全兼容传统8051、12时钟和6时钟模式可任意选择的特点[4,5]。
SW800系列直流云台说明

四条巡视轨迹
0—63 个预置点
标准 RS-485 水平 0-350° 垂直 -60°— +45°
根据设置可以调速(四档变速) 水平限位角度可调 水平左右转 垂直上下转 水平垂直单独或同时自动巡检 坐装
顶装 5Kg
单侧护罩 双侧护罩
侧装(单侧)5Kg
-20℃— +70℃ 120(宽)x98(厚)x122(高)mm ≤3.5Kg
12 0 98
SW810、811型云台外形与尺寸 (带 有内置解码器)
图1 云台外形与尺寸
多种使用方式的独特设计
�
通过两个防护罩在云台上的不同安装方法,实现坐式安装、吊式安装、 单 侧安装或双侧安装,极大的扩展了云台的使用范围与灵活性,详见图 2 至
13 7 162
图 5。
托架立装
托架侧装
图2 托架 在 云台 上 的安 装方式
SW810 、 811 系列 小型直流云台
使用手册
SW8XX 系列直流云台的分类
� �
SW810-直流 12V 内置解码器匀速小型直流云台 SW811-直流 12V 内置解码器变速小型直流云台
SW8XX 系列直流云台的结构尺寸与特点
�
在获得大承载的前提下 , 结构超小型 , 图 1 示出了它的视图与尺寸。
�
技术数据
型 号 输入电压 电机功率 波特率 通讯方式 旋转范围 旋转速度 旋转限制 2400 SW810 DC12V±20% 2 x 4W 4800 9600 任选
标准 RS-485 水平 0-360°连续旋转 水平 12°/s±5% 垂直 -60°— +45° 垂直 5°/s±5%Leabharlann 360°连续旋转�
”蜘蛛侠“仿生机器人说明书

"蜘蛛侠"仿生机器人设计说明书参赛者:江晓通李江全张其指导老师:何毅斌洪汉玉所在学校:武汉工程大学目录第一章引言 (3)1.1研究背景 (3)1.2国内外研究成果 (3)第二章仿生蜘蛛机器人的结构设计 (3)2.1设计的功能要求及分析 (3)2.2总体设计 (3)2.2.1结构分布 (3)2.2.2仿生蜘蛛机器人尺寸 (3)2.3详细设计 (4)2.3.1普通步行足 (4)2.3.1.1结构 (4)2.3.1.2驱动 (5)2.3.1.3减震器 (8)2.3.2多功能复合足 (9)2.3.2.1结构 (9)2.3.2.2驱动 (10)2.3.2.3复合足和减震器 (10)2.3.3躯干及外壳 (10)第三章步态分析及控制方案 (11)3.1蜘蛛的步态研究 (11)3.2控制方案 (13)第四章仿生蜘蛛机器人尺寸与性能分析 (14)4.1动作能力分析 (14)4.2设计合理性 (14)4.2.1驱动部分 (14)4.2.2机构原理 (14)4.2.3结构与强度 (14)4.2.4重量 (16)4.3设计可行性 (16)4.4创新性 (16)参考文献 (18)第一章引言1.1研究背景在如今的科技飞速发展的时代,机器人早已成为家喻户晓的科技产品,它被广泛的应用于各种场合和领域,像生产业、建筑业,或是危险的工作环境。
而将仿生学的一些技术应到机器人上做成的仿生机器人则能够在某些方面的更好的服务于人。
1.2国内外研究成果在机器人领域发展最好的应该是美国、日本了。
美国的仿生军用机器狗做的已经很成熟了,能够行走在各种不同地形,草地、雪地、山地等都能够平稳的行走,其自平衡能力允许它受到一定的冲击却仍能马上调整好身体而继续平稳行走。
日本的仿生机器人也十分的先进。
国内的机器人也在迅速的发展,一些仿生机器人也能够在自己的领域发挥它独特的功能。
第二章仿生蜘蛛机器人的结构设计2.1设计的功能要求及分析通过对蜘蛛结构和行为的研究,设计的仿生蜘蛛机器人可以用于多种场合。
XND-S8-010-011蜘蛛机器人手工制作教学设计
生:能。 师:好,那我们就赶快开始我们的神奇之旅吧!首先我们一起先来看个小视频吧!
在看的过程中小朋友们要仔细观察哦!好不好? 生:好。 师:在刚刚的视频中给我们演绎了一个神通广大的,外观红色,身手敏捷、灵活,
大败绿恶魔的什么传奇人物? 生:蜘蛛侠。 师:没错,就是蜘蛛侠。
2、兴趣点及引导质疑: 师:有哪位小朋友们给大家讲一讲你看过的有关蜘蛛侠的故事呢? 生:我。 师:有请这位最积极的小朋友。 生:蜘蛛侠…… 师:小朋友们讲的真不错!虽然我们见不到真正的蜘蛛侠,但是老师可以帮助小
朋友们见到蜘蛛机器人哦!小朋友们想不想见见它? 生:想。 师:那接下来就让我们用热烈的掌声把它请出来吧! 生:(掌声) 师:这就是我们小牛顿自制的“蜘蛛机器人”,小朋友们觉得它可以爬行吗? 生:可以,不可以。 师:好,现在我们来实验一下,你发现什么了呢? 生:可以。 师:没错,我们的蜘蛛机器人的确可以爬行。蜘蛛机器人为什么会爬行呢?接下
《蜘蛛机器人》详案
一、教学目标: 1、知识目标:
通过对蜘蛛的探究,帮助儿童了解有关蜘蛛的种类和特点;通过蜘蛛机器人 的实验,帮助学生更加清晰直观地认识齿轮与传动。 2、能力目标: 锻炼学生利用简单器材完成实验能力,改动实验效果的能力。 3、思维目标: 通过以上两点提升学生观察、分析的思维能力和创新能力。
探究(2):认识齿轮及齿轮传动 师:大家看!这是什么呢? 生:齿轮。 师:没错,这就是齿轮。小朋友们在哪里都见过齿轮呢? 生:钟表…… 师:没错,最常见的就是钟表。那么通过我们以前的学习以及对生活的观察,我
们发现齿轮是能互相啮合的有齿的机械零件。是不是? 生:是。 师:那么齿轮有哪些特点呢? 生:传递动力…… 师:我们一起来探究一下,大家看老师手中有两个齿轮,这两个齿轮是一样大小
DEWALT DW-803 810 811 812小型角磨机 说明书

使用说明书DW803, DW810, DW811, DW812小型角磨机4F1 F2安全守则在使用电动工具时,一定要遵守贵国的安全条例,以避免或减少火灾,触电与受伤的意外事故发生。
在使用本工具时,请仔细阅读以下的安全守则。
请将此说明书妥善保存!一般安全规则工作场地保持工作场地清洁和明亮。
混乱和黑暗的场地会引发事故。
不要在易爆环境,如有易燃液体、气体或粉尘的环境下操作电动工具。
电动工具产生的火花会点燃粉尘或气体。
让儿童或旁观者离开后操纵电动工具。
分心会使你放松控制。
电气安全电动工具插头必须与插座相配。
绝不能以任何方式改装插头。
需接地的电动工具不能使用任何转换插头。
未经改装的插头和相配的插座将减少触电危险。
避免人体接触接地表面,如管道、散热片和冰箱。
如果你身体接地会增加触电危险。
不得将电动工具暴露在雨中或潮湿环境中。
水进入电动工具将增加触电危险。
不得滥用电线。
绝不能用电线搬运、拉动电动工具或拔出其插头。
让电动工具远离热、油、锐边或运动部件。
受损或缠绕的电线会增加触电危险。
当在户外使用电动工具时,使用适合户外使用的外接电线。
适合户外使用的电线将减少触电危险。
人身安全保持警觉,当操作电动工具时关注所从事的操作并保持清醒。
切勿在有疲倦,药物、酒精或治疗反应下操作电动工具。
在操作电动工具期间精力分散会导致严重人身伤害。
使用安全装置。
始终配戴护目镜。
安全装置,诸如适当条件下的防尘面具、防滑安全鞋、安全帽、听力防护等装置能减少人身伤害。
避免突然起动。
确保开关在插入插头时处于关断位置。
手指放在已接通电源的开关上或开关处于接通时插入插头可能会导致危险。
在电动工具接通之前,拿掉所有调节钥匙或扳手。
遗留在电动工具旋转零件上的扳手或钥匙会导致人身伤害。
手不要伸得太长。
时刻注意脚下和身体平衡。
这样在意外情况下能很好地控制电动工具。
着装适当。
不要穿宽松衣服或佩带饰品。
让你的头发、衣服和袖子远离运动部件。
宽松衣服、佩饰或长发可能会卷入运动部件。
蜘蛛型机器人课程设计

蜘蛛型机器人课程设计一、课程目标知识目标:1. 学生能理解蜘蛛型机器人的基本构造和原理,掌握其运动方式和控制方法。
2. 学生能了解蜘蛛型机器人在实际应用中的优势和局限性,并对其未来发展有一定认识。
技能目标:1. 学生能够运用所学知识,设计并搭建一个简单的蜘蛛型机器人模型。
2. 学生能够编写程序,实现对蜘蛛型机器人的基本控制,如直线行走、转弯等。
3. 学生能够运用团队协作和问题解决的能力,对蜘蛛型机器人进行调试和优化。
情感态度价值观目标:1. 学生对蜘蛛型机器人及其相关技术产生兴趣,培养科技创新意识。
2. 学生在团队合作中学会相互尊重、沟通与协作,培养团队精神和责任感。
3. 学生能够关注蜘蛛型机器人在社会生活中的应用,认识到科技对人类生活的影响,提高社会责任感。
课程性质:本课程为实践性较强的课程,结合理论知识与动手操作,培养学生创新思维和实际操作能力。
学生特点:六年级学生具备一定的观察、分析和动手能力,对新鲜事物充满好奇心,喜欢挑战性任务。
教学要求:教师应注重理论与实践相结合,引导学生主动探究,鼓励学生动手实践,关注学生个体差异,提供有针对性的指导。
通过本课程的学习,使学生能够达到上述课程目标,为后续学习打下坚实基础。
二、教学内容1. 机器人基础知识:介绍蜘蛛型机器人的基本构造、原理及其特点,关联课本第二章“机器人概述”。
- 机器人发展历程- 机器人基本构造与功能- 蜘蛛型机器人原理及优势2. 蜘蛛型机器人结构与设计:学习蜘蛛型机器人的结构设计,关联课本第三章“机器人结构与设计”。
- 蜘蛛型机器人的机械结构- 关节及传动系统设计- 整体布局与重量分配3. 控制系统与编程:掌握蜘蛛型机器人的控制方法,关联课本第四章“机器人控制技术”。
- 控制系统原理- 编程基础与逻辑控制- 蜘蛛型机器人控制实例4. 动手实践与调试优化:实践操作,关联课本第五章“机器人实践与应用”。
- 搭建蜘蛛型机器人模型- 编写控制程序- 调试与性能优化5. 蜘蛛型机器人在实际应用中的案例分析:了解蜘蛛型机器人的应用场景,关联课本第六章“机器人应用案例分析”。
ARDUINO蜘蛛机器人搭建教程,仿生蜘蛛机器人的设计与实现

ARDUINO蜘蛛机器人搭建教程,仿生蜘蛛机器人的设计与实现成品展示(原文作者-MegaDAS)材料:1.- 订购的PCB电路板(资料可以下载)2.- 12个伺服电机,每条腿有3个伺服电机(伺服代码+机器人主程序代码可以下载)3.- 一个Arduino Nano4.- HC-06蓝牙模块5.- 一个OLED显示屏6.- 5mm RGB LED7.- 单排40Pin 2.54 mm公针式接头连接器8.- 机器人身体(3D打印机文件可下载)9.-Android应用程序(资料可以下载)简介由于每个人都注意到了机器人技术的高速发展,我们决定将你们带到机器人和机器人制造的更高层次,我们刚开始做一些基本的电子项目和像PICTO92这样的基本黑线机器人,以便让你对电子产品有点熟悉,并发现自己能够发明自己的项目,转到另一个层次,我们已经开始使用这个概念中的基本机器人,但如果你的程序更深入,它将变得有点复杂。
由于这些小工具在网上商店非常昂贵,我们提供一步一步的指导,指导你们制作自己的Spiderbot。
该项目定制自己的PCB,这样会非常方便,可以改善我们机器人的外观,本指南中还有PCB文件和程序还有代码,都已经打包好,私信88151自动获取地址,我们只用了7天就完成了这个项目,两天完成了硬件制作和组装,五天时间来准备代码和android应用程序。
特点仿生蜘蛛机器人是模仿多足的动物的运动的方式的特殊一种的机器人。
经过调查显示,在地球上有大约二分之一的陆地那些常规的载具,像汽车火车履带式的载具都无法到达。
自然界中却有很多生物却可以自由的活动在那里。
因此,仿生机器人的运动方式更有着其他不具有的能力优势,仿生机器人运动方式流动性良好,能适应各种崎岖路面。
仿生蜘蛛机器人在崎岖和路况极差的地面上的运动速度仍然很快,而且能耗较少。
主要执行器-伺服电机伺服电动机不是特定类别的电动机,尽管术语伺服电动机通常用于指代适用于闭环控制系统的电动机,一般而言,控制信号是方波脉冲序列,控制信号的公共频率为44Hz,50Hz和400Hz,正脉冲宽度决定伺服位置,大约0.5ms的正脉冲宽度将使伺服喇叭向左偏转尽可能多的偏差(通常约45至90度,取决于所讨论的伺服),正脉冲宽度约2.5ms至3.0ms将使伺服器尽可能向右偏转,大约1.5ms的脉冲宽度将使伺服将中性位置保持在0度,输出高电压通常介于2.5伏和10伏之间(典型值为3V),输出低电压范围为-40mV至0V。
用于除雪破冰的蜘蛛型机器人的制作流程
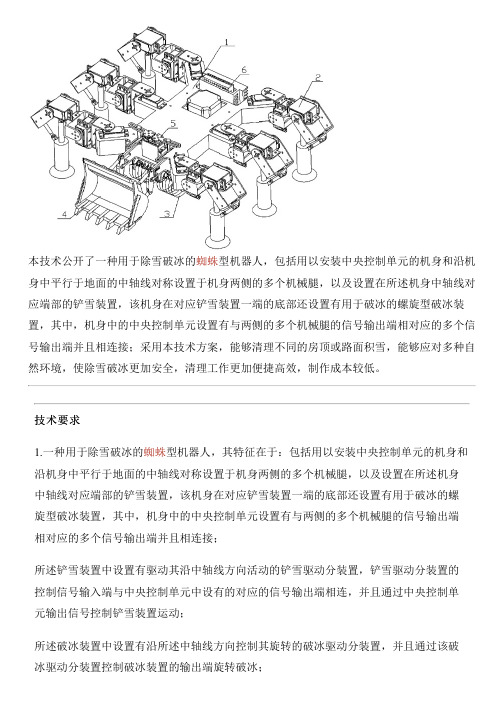
本技术公开了一种用于除雪破冰的蜘蛛型机器人,包括用以安装中央控制单元的机身和沿机身中平行于地面的中轴线对称设置于机身两侧的多个机械腿,以及设置在所述机身中轴线对应端部的铲雪装置,该机身在对应铲雪装置一端的底部还设置有用于破冰的螺旋型破冰装置,其中,机身中的中央控制单元设置有与两侧的多个机械腿的信号输出端相对应的多个信号输出端并且相连接;采用本技术方案,能够清理不同的房顶或路面积雪,能够应对多种自然环境,使除雪破冰更加安全,清理工作更加便捷高效,制作成本较低。
技术要求1.一种用于除雪破冰的蜘蛛型机器人,其特征在于:包括用以安装中央控制单元的机身和沿机身中平行于地面的中轴线对称设置于机身两侧的多个机械腿,以及设置在所述机身中轴线对应端部的铲雪装置,该机身在对应铲雪装置一端的底部还设置有用于破冰的螺旋型破冰装置,其中,机身中的中央控制单元设置有与两侧的多个机械腿的信号输出端相对应的多个信号输出端并且相连接;所述铲雪装置中设置有驱动其沿中轴线方向活动的铲雪驱动分装置,铲雪驱动分装置的控制信号输入端与中央控制单元中设有的对应的信号输出端相连,并且通过中央控制单元输出信号控制铲雪装置运动;所述破冰装置中设置有沿所述中轴线方向控制其旋转的破冰驱动分装置,并且通过该破冰驱动分装置控制破冰装置的输出端旋转破冰;所述机身中还设置有用于探测雪层厚度的探测器,且探测器的信号输出端与中央控制单元对应设置的输入端相连接。
2.按照权利要求1所述的一种用于除雪破冰的蜘蛛型机器人,其特征在于,所述机身中包括顶板和底板,底板中设置有用于安装所述中央控制单元的凹槽,底板和顶板均延伸设置有用于对应于所述多个机械腿安装的腿部安装板,所述多个机械腿与机身相连接的端部通过对应的腿部安装板相连,底板沿中轴线方向安装所述铲雪装置的一端延伸设置有与其相连的铲雪安装板,底板背离铲雪装置的端部设置有对应安装破冰驱动分装置的破冰驱动安装板,且腿部安装板、铲雪安装板和破冰驱动安装板设置成同一水平面。
蜘蛛机器人设计研究
蜘蛛机器人设计研究作者:吴凯江亚龙殷建来源:《中国新技术新产品》2015年第02期摘要:蜘蛛机器人是针对在狭小通道和深井的探测、搜索、救援工作。
以真正实现海陆空搜寻机器人系统全方位的搜救。
作为本文的研究重点是对蜘蛛机器人的机械零部件、行走机构、驱动控制和信息反馈及处理做了详细的分析和设计,使得蜘蛛机器人满足灵活、小巧、经济的要求。
使得蜘蛛机器人完全异于普通搜救机器人。
为蜘蛛机器人设计了强大的机械手臂库,提高其应用范围使得蜘蛛机器人不仅能实现探索,更能替人在无法到达的环境工作。
关键词:深井搜救;管道探测;蜘蛛;机器人中图分类号:TP242 文献标识码:A在21世纪的今天,随着自然灾害、恐怖活动和各种突然事故发生的越来越多,在灾难救援中,救援人员用较短的时间在废墟中寻找幸存者的几率比较小,在这种紧急而危险的情况下,救援机器人可以为救援人员提供有效的帮助。
因此那些经常接触不到和容易被人忽略的死角,例如通风管道,就成为我们重点监测的对象。
深井搜救和管道探测在搜救过程中显得尤为重要。
在保证搜救人员的安全前提下,提高搜救效率是当今社会关注的焦点。
近十年来,美国、日本等西方发达国家在地震、火灾等救援机器人的研究方面做了大量的工作。
日本大阪大学研制出蛇形机器人,能在高低不平的模拟废墟上前进,其顶端带有1部小型监视器,身体部位安装传感器,可以在地震后的废墟里寻找幸存者。
2006年6月,中国矿业大学的机器人研究所成功研制了“CUMT-1”矿井救灾机器人,并对救灾机器人的机构设计做了一些有益的尝试。
本文提出了蜘蛛机器人的概念设计,然后着重对创新设计的移动方式及强大的机械手臂库做了详细的论述。
2 蜘蛛机器人本体设计通过对国内外蜘蛛机器人移动方式的比较,蜘蛛机器人的前进方式有连杆机构式、单杆机构式和腹部蠕动式,连杆机构和单杆机构的运动方式类似于划船时的船桨运动,是通过对壁面向后的摩擦力来实现前进,但是由于其返程路径必须和原路径不一致,因此都需要加入新的机构和连杆机构、单杆机构进行组合,最终形成的机构体积较为庞大,给日后进一步开发、实现小型化增添了困难。
仿生蜘蛛机器人的设计与研究

ii
目
录
摘 要....................................................................................................................... i ABSTRACT............................................................................................................ ii 目 录................................................................................................................... iii 1 绪 论.................................................................................................................. 1 1.1 课题背景及目的................................................................................................ 1 1.2 仿生机器人研究现状及发展趋势............................................................ 2 2 设计思路.............................................................................................................. 7 2.1 仿生学原理分析........................................................................................ 7 2.1.1 仿生蜘蛛机器人的研究方法及思路............................................ 7 3 整体设计方案...................................................................................................... 9 3.1 工作原理分析............................................................................................ 9 3.1.1 三角步态原理分析........................................................................ 9 3.1.2 机器人走动步态分析.................................................................... 9 3.2 机器人机构总体设计............................................................................... 9 3.3 电机的选择............................................................................................. 13 3.4 舵机驱动原理......................................................................................... 15 3.4.1 舵机原理...................................................................................... 16 3.4.2 舵机控制方法.............................................................................. 16 4 零件的设计........................................................................................................ 18 4.1 躯干的设计............................................................................................. 18 4.2 基节设计................................................................................................. 19 4.3 关节盖的设计......................................................................................... 20 4.4 胫节片的设计......................................................................................... 20 4.5 足的设计................................................................................................. 22 4.6 连接杆的设计......................................................................................... 22 4.7 固定片的设计......................................................................................... 23 结 论..................................................................................................................... 24 参考文献................................................................................................................. 26 致 谢..................................................................................................................... 28