北京理工大学自动控制理论实验报告4
北理工自动控制理论实验报告
北理工自动控制理论实验报告摘要:本实验主要研究和探索自动控制理论在北理工的应用。
通过实验验证控制系统在不同环境下的稳定与准确性,并针对实验结果进行分析和总结。
引言:自动控制理论是近年来快速发展的学科之一,广泛应用于工业自动化系统、航空航天、交通运输等领域。
在北理工学习自动控制理论的过程中,本实验通过搭建实验系统,验证了自动控制理论的实际应用。
实验目的:1.验证控制系统的稳定性;2.检测不同环境下控制系统的输出准确性;3.分析控制系统参数的优化方法。
实验原理:本实验使用PID控制器来实现对控制系统的控制。
PID控制器是一种常见且广泛应用的控制方式,具有简单且高效的优点。
PID控制器的原理是根据系统测量值与期望值的误差计算出一个综合的控制值,通过反馈作用对系统进行调整。
其中,P项(比例项)、I项(积分项)和D项(微分项)表示了系统的偏差、系统稳定性和系统响应速度。
实验装置:实验所需的装置包括一台控制系统、传感器和执行器。
控制系统通过传感器获取反馈信号,将其与期望值进行比较,并通过执行器调节控制系统的输出。
实验步骤:1.搭建实验系统,包括控制器、传感器和执行器;2.设定期望值,将期望值输入控制系统;3.设置控制器参数,并将其与控制系统连接;4.开始实验,记录系统的输出值;5.对实验结果进行分析和总结。
实验结果:实验中记录了不同环境下控制系统的输出值,并与期望值进行比较。
结果表明,控制系统在不同环境下都能保持稳定,且输出值与期望值的误差在可接受范围内。
通过分析实验结果,总结出了一些优化控制系统参数的方法,如调整P、I、D参数的比例,根据实际需求对系统进行调整等。
结论:本实验通过对自动控制理论的实际应用进行研究和探索,验证了控制系统在不同环境下的稳定性和准确性。
实验结果表明,自动控制理论在北理工的应用具有较高的实效性和可行性。
本实验的结果对进一步优化控制系统参数和提高系统稳定性具有一定的指导意义。
[1]张三.自动控制理论与应用[M].北京:XXXX。
北理工自动控制理论实验报告

本科实验报告实验名称:控制理论基础(实验)实验一:控制系统的模型建立一、实验目的1.掌握利用MATLAB 建立控制系统模型的方法。
2.掌握系统的各种模型表述及相互之间的转换关系。
3. 学习和掌握系统模型连接的等效变换。
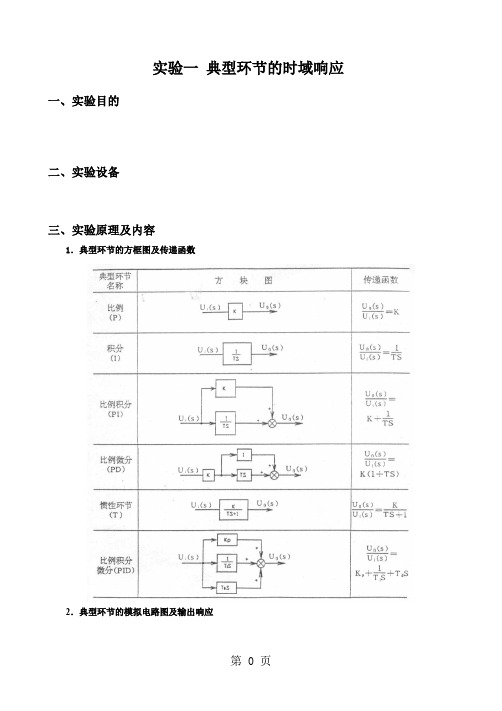
二、实验原理1、系统模型的 MATLAB描述系统的模型描述了系统的输入、输出变量以及内部各变量之间的关系,表征一个系统的模型有很多种,如微分方程、传递函数模型、状态空间模型等。
这里主要介绍系统传递函数(TF)模型、零极点增益(ZPK)模型和状态空间(SS)模型的MATLAB 描述方法。
1)传递函数(TF)模型传递函数是描述线性定常系统输入-输出关系的一种最常用的数学模型,其表达式一般为在MATLAB 中,直接使用分子分母多项式的行向量表示系统,即num = [bm, bm-1, … b1, b0]den = [an, an-1, … a1, a0]调用tf 函数可以建立传递函数TF对象模型,调用格式如下:Gtf = tf(num,den)Tfdata 函数可以从TF对象模型中提取分子分母多项式,调用格式如下:[num,den] = tfdata(Gtf) 返回cell 类型的分子分母多项式系数[num,den] = tfdata(Gtf,'v') 返回向量形式的分子分母多项式系数2)零极点增益(ZPK)模型传递函数因式分解后可以写成式中, z1 , z2 , …,zm 称为传递函数的零点, p1,p2,…,pn称为传递函数的极点,k 为传递系数(系统增益)。
在MATLAB 中,直接用[z,p,k]矢量组表示系统,其中z,p,k 分别表示系统的零极点及其增益,即:z=[z1,z2,…,zm];p=[p1,p2,…,pn];k=[k];调用zpk 函数可以创建ZPK 对象模型,调用格式如下:Gzpk = zpk(z,p,k)同样,MATLAB 提供了zpkdata 命令用来提取系统的零极点及其增益,调用格式如下:[z,p,k] = zpkdata(Gzpk) 返回cell 类型的零极点及增益[z,p,k] = zpkdata (Gzpk,’v’) 返回向量形式的零极点及增益函数pzmap 可用于求取系统的零极点或绘制系统得零极点图,调用格式如下:pzmap(G) 在复平面内绘出系统模型的零极点图。
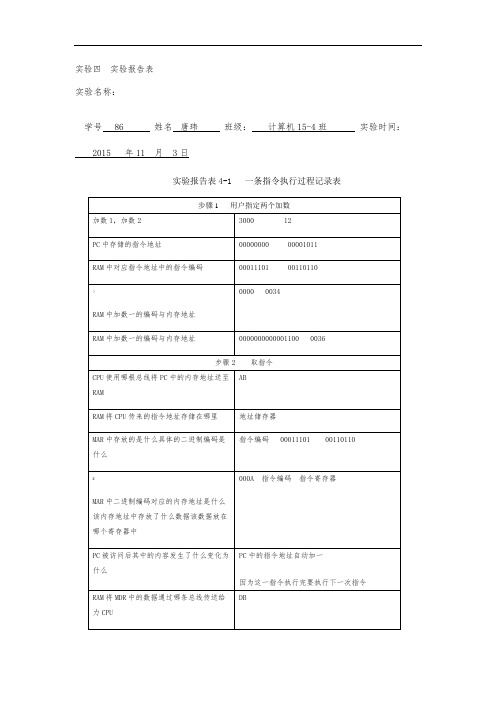
北京理工大学-实验四--实验报告表
RAM把第一个操作数存放在哪个寄存器上,通过哪组总线传送给CPU
:
数据存储器 DBΒιβλιοθήκη CPU把取到的第一个操作数存放在哪里
GR
步骤5 加法计算
CPU把两个加数放入哪里进行加法运算
ALU 计算器
当两个加数相加结束后,CPU把相加结果存放在哪里
加数一所在的通用寄存器中
00000034
RAM中加数一的编码与内存地址
00000000000011000036
步骤2 取指令
CPU使用哪根总线将PC中的内存地址送至RAM
AB
RAM将CPU传来的指令地址存储在哪里
地址储存器
MAR中存放的是什么具体的二进制编码是什么
指令编码0001110100110110
#
MAR中二进制编码对应的内存地址是什么该内存地址中存放了什么数据该数据放在哪个寄存器中
000A 指令编码 指令寄存器
PC被访问后其中的内容发生了什么变化为什么
PC中的指令地址自动加一
因为这一指令执行完要执行下一次指令
RAM将MDR中的数据通过哪条总线传送给力CPU
DB
CPU将RAM传来的指令存放在哪里
指令寄存器 IR
IR中存放的指令二进制编码是什么
0001 110100 110110
¥
步骤3 指令译码
IR中的操作码和两个操作数的内存地址分别是什么(请分别用用六位二进制数和四位十六进制表示)
0000010001
操作数1:110100 0034
操作数2:110110 0036
译码在哪里进行并通过哪组总线把该操作传递给RAM
CU控制器 CB
步骤4 取数据
CPU通过哪组总线传送地址RAM将这个地址存放在哪里
自动控制理论实验报告4

H a r b i n I n s t i t u t e o f T e c h n o l o g y姓名:学号:课程名称:实验名称:实验序号:实验日期:实验室名称:同组人:实验成绩:总成绩:教师评语:教师签字:年月日采用PI 的串联校正、具有微分负反馈的反馈校正实验一、实验目的:1.了解和观测校正装置对系统稳定性及瞬态特性的影响; 2.验证频率法校正是否满足性能要求;3.按给定性能指标,对固有模拟对象运用并联校正对数频率特性的近似作图法,进行反馈校正;4.用实验验证理论计算结果;5. 熟悉期望开环传递函数为典型I型的参数计算及微分反馈校正调节器的实现。
二、实验要求:1.观测未校正系统的稳定性及瞬态响应;2.观测校正后系统的稳定性极瞬态响应。
三、实验原理、内容及步骤(一)采用PI 的串联校正实验1.原系统的原理方块图 校正前系统的方框图如图1所示图1校正前系统的方框图要求设计PI 串联校正装置,校正时使期望特性开环传递函数为典型II 型并使系统满足下列指标:%25≤pMSt s84.0≤校正网络的传递函数为:CSR CS R s G c 011)(+=校正后系统的方框图如图2所示图2 校正后的方框图2.系统校正前后的模拟电路图图3 系统校正前的模拟电路图图4系统校正后的模拟电路图3.实验内容及步骤(1)测量未校正系统的性能指标。
准备:将模拟电路输入端R(t)与信号源单元(U1 SG)的输出端OUT端相连接;模拟电路的输出端C(t)接至示波器。
步骤:按图3接线;加入阶跃电压,观察阶跃响应曲线,并测出超调量Mp和调整时间Ts,记录曲线及参数。
(2)测量校正后系统的性能指标。
准备:设计校正装置参数;由)1(4.016.0-+=r p M M ,25.0%25==p M ,可得225.1=r M ,464.2)1(5.2)1(5.122=-+-+=r r M M Ks rad t k s c 2.984.014.3*464.2==∏=ω1089.91225.11225.111≈=-+=-+=r r M M h67.11102.9*2121=+=+=h c ωω 7.1610*67.112===h ωω36.152.9*67.11===∂c K ωω)106.0()16.0(36.15)1()1(K 2221++=++=∂s s s s T s s T G 期望)106.0(50+=s s G 原有sC R s C R K s s G G G w 1011)1()16.0(31.0+=+==原有期望校正取545.1110=C R ,其中K R 1000=,则u C 47.61= K C R 7.926.011==2.0545.131.023===w K R R 取R 2=250K ,则有R 3=50K 因此各参数的取值分别为:R 1= 92.7KC=6.47u R 2= 250K R 3=50K步骤:按图4接线,加入阶跃电压,观察阶跃响应曲线,并测出超调量Mp 和调整时间Ts ,看是否达到期望值,若未达到,请仔细检查接线、参数值并适当调节参数值。
自动控制理论实验报告

《自动控制理论》实验报告学院自动化学院专业班级姓名学号目录实验一典型系统的时域响应和稳定性分析 (1)实验二用MATLAB建立传递函数模型 (4)实验三利用MATLAB进行时域分析 (7)实验四线性定常控制系统的稳定分析 (27)实验五利用MATLAB绘制系统根轨迹 (33)实验六线性系统的频域分析 (38)实验一 典型系统的时域响应和稳定性分析一、实验目的1.研究二阶系统的特征参量 (ξ、ωn ) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉Routh 判据,用Routh 判据对三阶系统进行稳定性分析。
三、实验原理及内容1.典型的二阶系统稳定性分析1)典型二阶系统瞬态性能指标实验测试值 理论分析系统开环传递函数为:G(s)=ss Rk +2^2.0/200开环增益: K=200k/RT0=1, T1=0.2,k1=200k/R系统闭环传递函数为:W=Rk s s Rk /2002^2.0/200++其中自然振荡角频率:ωn=(1000K/R)^0.5;阻尼比:ξ=Rk /100025。
其中21eMp ζ-ζπ-=,2np1t ζ-ωπ=,n s 4t ζω=,21p e 1)t (C ζ-ζπ-+=欠阻尼临界阻尼参数 项目R (K Ω)KωnξC (t p )C (∞)M P (%)t P (s) t S (s)响应 情况理 论 值测 量 值理 论 值测 量 值理 论 值 测 量 值0<ξ<1 欠阻尼 20 10 7.07 0.35 1.242 0.94431.0%29.7%0.474 0.4841.611.125有振荡 ξ=1 临界 阻尼 96.1 2.08 3.22 0.77 / 0.944 / / 1.611.109 无振荡ξ> 1 过阻尼160 1.25 2.5 1 / 0.944 / / 1.6 1.914无振荡过阻尼2)典型三阶系统在不同开环增益下的响应情况表1-2R(KΩ) 开环增益K 稳定性30 40.97 不稳定发散实验二 用MATLAB 建立传递函数模型一、实验目的(1)熟悉MATLAB 实验环境,掌握MATLAB 命令窗口的基本操作; (2)掌握MATLAB 建立控制系统数学模型的命令及模型相互转换的方法; (3)掌握使用MATLAB 命令化简模型基本连接的方法;(4)学会使用Simulink 模型结构图化简复杂控制系统模型的方法。
自动控制理论实验报告
实验一典型环节的电路模拟与软件仿真研究一.实验目的1.通过实验熟悉并掌握实验装置和上位机软件的使用方法。
2.通过实验熟悉各种典型环节的传递函数及其特性,掌握电路模拟和软件仿真研究方法。
二.实验内容1.设计各种典型环节的模拟电路。
2.完成各种典型环节模拟电路的阶跃特性测试,并研究参数变化对典型环节阶跃特性的影响。
3.在上位机界面上,填入各个环节的实际(非理想)传递函数参数,完成典型环节阶跃特性的软件仿真研究,并与电路模拟研究的结果作比较。
三.实验步骤1.熟悉实验箱,利用实验箱上的模拟电路单元,参考本实验附录设计并连接各种典型环节(包括比例、积分、比例积分、比例微分、比例积分微分以及惯性环节)的模拟电路。
注意实验接线前必须先将实验箱上电,以对运放仔细调零。
然后断电,再接线。
接线时要注意不同环节、不同测试信号对运放锁零的要求。
在输入阶跃信号时,除比例环节运放可不锁零(G可接-15V)也可锁零外,其余环节都需要考虑运放锁零。
2.利用实验设备完成各典型环节模拟电路的阶跃特性测试,并研究参数变化对典型环节阶跃特性的影响。
无上位机时,利用实验箱上的信号源单元U2所输出的周期阶跃信号作为环节输入,即连接箱上U2的“阶跃”与环节的输入端(例如对比例环节即图1.1.2的Ui),同时连接U2的“锁零(G)”与运放的锁零G。
然后用示波器观测该环节的输入与输出(例如对比例环节即测试图1.1.2的Ui和Uo)。
注意调节U2的周期阶跃信号的“频率”电位器RP5与“幅值”电位器RP2,以保证观测到完整的阶跃响应过程。
有上位机时,必须在熟悉上位机界面操作的基础上,充分利用上位机提供的虚拟示波器与信号发生器功能。
为了利用上位机提供的虚拟示波器与信号发生器功能,接线方式将不同于上述无上位机情况。
仍以比例环节为例,此时将Ui连到实验箱 U3单元的O1(D/A 通道的输出端),将Uo连到实验箱 U3单元的I1(A/D通道的输入端),将运放的锁零G连到实验箱 U3单元的G1(与O1同步),并连好U3单元至上位机的USB2.0通信线。
北理工自动控制理论实验报告
Gzpk = 2 (s+5) (s+4) -------------------(s+3) (s^2 + 2s + 2) Continuous-time zero/pole/gain model.
Gss = A= x1 x2 x3 B= x1 x2 x3 C= y1 D= u1 y1 0 Continuous-time state-space model. 系统零极点图 x1 x2 0.5 1.125 x3 2.5 u1 4 0 0 x1 -5 4 0 x2 x3 -2 -1.5 0 0 1 0
系统模型的连接
在实际应用中,整个控制系统是由多个单一的模型组合而成,基本的组合方式有串联连
接、并联连接和反馈连接。图 1-2 分别为串联连接、并联连接和反馈连接的结构框图和等效总 传递函数。
(a)串联系统
(b)并联系统
(c)反馈连接 在 MATLAB 中可以直接使用“*”运算符实现串联连接,使用“+”运算符实现并联连接。反馈系 统传递函数求解可以通过命令 feedback 实现,调用格式如下: T = feedback(G,H), T = feedback(G,H,sign) 其中,G 为前向传递函数,H 为反馈传递函数;当 sign = +1 时,GH 为正反馈系统传递函 数;当 sign = -1 时,GH 为负反馈系统传递函数;默认值是负反馈系统。
传递函数因式分解后可以写成:
式中 z1,z2,…,zm 称为传递函数的零点;P1,P2,…,Pn 称为传递函数的极点;k 为传递系数(系统增益) 。 在 MATLAB 中,直接用[z,p,k]矢量组表示系统,其中 z,p,k 分别表示系统的零极点及其 增益,即:z=[z1,z2,…,zm];p=[p1,p2,…,pn];k=[k]; 调用 zpk 函数可以创建 ZPK 对象模型,调用格式如下: Gzpk = zpk(z,p,k) 同样,MATLAB 提供了 zpkdata 命令用来提取系统的零极点及其增益,调用格式如下: [z,p,k] = zpkdata(Gzpk) 返回 cell 类型的零极点及增益 [z,p,k] = zpkdata (Gzpk,’v’) 返回向量形式的零极点及增益 函数 pzmap 用来求取系统的零极点或绘制系统得零极点图,调用格式如下:pzmap(G) 在 复平面内绘出系统模型的零极点图。 [p,z] = pzmap(G) 返回的系统零极点,不作图。 3) 状态空间(SS)模型
自动控制理论实验报告

电气学科大类2008 级《信号与控制综合实验》课程实验报告(基本实验: 自动控制理论基本实验)姓名赵谦学号U200811906 专业班号电气0809 同组者1 辛辰学号U200811901专业班号电气0809 同组者2 学号专业班号指导教师日期实验成绩评阅人实验评分表目录实验十一二阶系统的模拟与动态性能研究 (4)任务与目标 (4)总体方案设计 (4)方案实现和具体设计 (5)实验设计与试验结果 (5)结果分析与讨论 (9)思考题 (9)实验十二二阶系统的稳态性能研究 (12)任务与目标 (12)总体方案设计 (12)方案实现和具体设计 (13)实验设计与试验结果 (14)结果分析与讨论 (19)思考题 (20)实验十四线性控制系统的设计与校正 (23)实验内容 (23)实验步骤 (28)实验结果 (30)结果分析与讨论 (32)思考题 (33)实验十六控制系统极点的任意配置 (34)实验内容 (34)实验步骤 (43)实验结果 (46)思考题 (51)心得与自我评价 (52)参考文献与致谢 (53)实验十一二阶系统的模拟与动态性能研究任务与目标1、掌握典型二阶系统动态性能指标的测试方法。
2、通过实验和理论分析计算的比较,研究二阶系统的参数对其动态性能的影响。
总体方案设计典型二阶系统的方框图如图11-1:图11-1,典型二阶振荡环节的方框图其闭环传递函数为:式中ξ为系统的阻尼比,nω为系统的无阻尼自然频率。
对于不同的系统,ζ和所包含的内容也是不同的。
调节系统的开环增益K,或时间常数T可使系统的阻尼比分别为:1,1,1ξξξ>=<三种。
实验中能观测对应于这三种情况下的系统阶跃响应曲线是完全不同的。
二阶系统可用图11-2所示的模拟电路图来模拟:图11-2,二阶系统模拟电路图实验中为了计算方便起见,将运放A3处的20K电阻换成了10K的电阻。
方案实现和具体设计1、在实验装置上搭建二阶系统的模拟电路(参考图11-2)。
北京理工大学自动控制matlab实验报告
MATLAB软件工具在控制系统分析和综合中的应用实验班级:01811001学号:1120100209姓名:戚煜华一、试验目的:1.了解MATLAB 这种强大的数学软件的基本特点和语言特点。
2.掌握控制系统在MATLAB 中的描述。
3.学会用MATLAB 的Control 工具箱中提供的仿真函数,例如连续时间系统在阶跃输入激励下的仿真函数step (),脉冲激励下的仿真函数impulse ()等。
4掌握典型一阶、二阶系统中参数的变化对阶跃响应曲线的影响;5掌握使用MATLAB 绘制控制系统的根轨迹图,并了解附加开环零、极点对闭环根轨迹的影响。
6.学会使用MATLAB 绘制系统频率特性曲线—乃氏图和伯德图,并利用MATLAB 求出系统的稳定裕度。
7.掌握系统串联校正后,开环指标及时域响应指标的变化规律。
二、试验设备:一台装有MATLAB 软件的电脑三、试验内容:2.以传函11)(+=Ts s G 为例,令T=0.1,1,10,绘制其单位阶跃响应曲线,并总结给出惯性时间常数对阶跃响应影响的结论。
T=0.1时的单位阶跃响应曲线T=1时的单位阶跃响应曲线T=10时的单位阶跃响应曲线结论:惯性时间常数T越大,上升时间、调节时间和延迟时间越长。
3.以传函2222)(nn n s s s G ωξωω++=为对象,令n ω=1,ξ=0,0.2,0.5,1,1.5分别绘制阶跃响应曲线。
令ξ=0.7,n ω=0.1,1,10分别绘制阶跃响应曲线,进行ξ、n ω对二阶阶跃响应的影响分析。
n ω=1,ξ=0:分析:n ω=1时,ξ=0,零阻尼,响应为无阻尼等幅振荡;ξ=0.2和0.5,欠阻尼,随着ξ的增大,振荡幅值减小,响应速度变慢,超调量减小;ξ=1,临界阻尼,响应变慢,超调和振荡消失;ξ=1.5,过阻尼,系统没有超调,且过渡时间较长。
综上所述,ξ越大,振荡幅值越小,过渡时间越长;ξ>=1以后,系统没有了超调和振荡。
北京理工大学 控制理论基础实验报告
控制理论基础实验1.控制系统的模型建立2.控制系统的暂态特性分析3.根轨迹分析4.系统的频率特性分析一、实验目的实验一1.掌握利用MATLAB建立控制系统模型的方法。
2.掌握系统的各种模型表述及相互之间的转换关系。
3.学习和掌握系统模型连接的等效变化。
实验二1.学习和掌握利用MATLAB进行系统时域响应求解和仿真的方法。
2.考察二阶系统的时间响应,研究二阶系统参数对系统暂态特性的影响。
实验三1.学习和掌握利用MATLAB绘制根轨迹图的方法2.学习和掌握利用系统根轨迹图分析系统的性能。
实验四1.学习和掌握利用MATLAB绘制系统Nyquist图和Bode图的方法。
2.学习和掌握利用系统的频率特性分析系统的性能。
二、实验原理1)传递函数模型(TF)gtf=tf(num,den)2)零极点增益模型(ZPK)Gzpk=zpk(z,p,k)3)状态空间模型(SS)Gss=ss(a,b,c,d)4)三种模型之间的转换TF→ZPK:z pk(sys)TF→SS:ss(sys)ZPK→TF:t f(sys)ZPK→SS:s s(sys)SS→TF:tf(sys)SS→ZPK:z pk(sys)5)绘制系统零极点图Pzmap(gzpk);Grid on;6)系统模型的串联G(s)=G1(s)*G2(s)7)系统模型的并联G(s)=G1(s)+G2(s)8)系统模型的反馈连接T=feedback(G,H)T=feedback(G,H,sign)9)绘制阶跃响应step(sys)step(sys,T)10)线性时不变系统仿真工具ltiview11)绘制系统根轨迹图rlocus(sys)rlocus(sys,k)[r,k]=rlocus(sys)12)计算鼠标选择点处根轨迹增益值和闭环极点值[k,poles]=rlocfind(sys)13)在连续系统根轨迹或零极点图上绘制出栅格线sgrid(‘new’)sgrid(z,Wn)14)绘制系统的Nyquist图nyquist(SYS)nyquist(sys,w)15)绘制系统的Bode图bode(sys)bode(sys,w)16)从频率响应数据中计算幅度裕度,相位裕度及对应角频率margin(sys)[mag,phase]=bode(sys,w)三、实验结果实验一1)零极点图2)零极点图3)总串联函数Transfer function:10 s^6 + 170 s^5 + 1065 s^4 + 3150 s^3 + 4580 s^2 + 2980 s + 525---------------------------------------------------------------------------------------------------------------------- s^9 + 24 s^8 + 226 s^7 + 1084 s^6 + 2905 s^5 + 4516 s^4 + 4044 s^3 + 1936 s^2 + 384 s 4)闭环传递函数Transfer function:2.25 s^2 + 7.5 s + 6-------------------------------------------------------0.25 s^4 + 1.25 s^3 + 2 s^2 + 5.5 s + 65)闭环传递函数Transfer function:20 s^3 + 160 s^2 + 400 s + 320-------------------------------------------------------------------------s^6 + 10 s^5 + 35 s^4 + 44 s^3 + 82 s^2 + 116 s - 48%1num=[2 18 40]; den=[1 5 8 6]; gtf=tf(num,den) gzpk=zpk(gtf) gss=ss(gtf) pzmap(gzpk);grid on%2a=[0 1 0 00 0 1 00 0 0 1-1 -2 -3 -4];b=[0 0 0 0]’;c=[10 2 0 0];d=0;gss=ss(a,b,c,d); gtf=tf(gss); gzpk=zpk(gss); pzmap(gzpk)grid on%3g1a=[2 6 5]; g1b=[1 4 5 2];g2a=[1 4 1];g2b=[1 9 8 0];g3z=[-3 -7];g3p=[-1 -4 -6];g3k=5;g1tf=tf(g1a,g1b);g2tf=tf(g2a,g2b);g3zpk=zpk(g3z,g3p,g3k);g3tf=tf(g3zpk);g=g1tf*g2tf*g3tf%4g1=tf([1],[1 1]);g2=tf(1,[0.5 1]);g3=g2;g4=tf(3,[1 0]);g=feedback((g1+g2)*g4,g3)%5g1=tf(10,[1 1]);g2=tf(2,[1 1 0]);g3=tf([1 3],[1 2]);g4=tf([5 0],[1 6 8]);g=feedback(g1*(feedback(g2, g3,1)),g4)实验二12(1)t d=0.272 t r=0.371 t p=0.787 t s=1.19ϭ=9%(2)(3)(4)ξ变大,延迟时间,上升时间,峰值时间,调整时间均越来越长,超调量开始时减小,然后保持不变。
北理工自控实验报告

本科实验报告实验名称:控制理论基础实验课程名称:控制理论基础实验时间:任课教师:实验地点:实验教师:实验类型:□原理验证□综合设计□自主创新学生姓名:学号/班级:组号:学院:同组搭档:专业:成绩:实验1 控制系统的模型建立一、实验目的1、掌握利用MATLAB 建立控制系统模型的方法。
2、掌握系统的各种模型表述及相互之间的转换关系。
3、学习和掌握系统模型连接的等效变换。
二、实验原理1、系统模型的 MATLAB描述系统的模型描述了系统的输入、输出变量以及内部各变量之间的关系,表征一个系统的模型有很多种,如微分方程、传递函数模型、状态空间模型等。
这里主要介绍系统传递函数(TF)模型、零极点增益(ZPK)模型和状态空间(SS)模型的MATLAB 描述方法。
1)传递函数(TF)模型传递函数是描述线性定常系统输入-输出关系的一种最常用的数学模型,其表达式一般为在MATLAB 中,直接使用分子分母多项式的行向量表示系统,即num = [bm, bm-1, … b1, b0];den = [an, an-1, … a1, a0];调用tf 函数可以建立传递函数TF 对象模型,调用格式如下:Gtf = tf(num,den);Tfdata 函数可以从TF 对象模型中提取分子分母多项式,调用格式如下:[num,den] = tfdata(Gtf) 返回cell 类型的分子分母多项式系数;[num,den] = tfdata(Gtf,'v') 返回向量形式的分子分母多项式系数;2)零极点增益(ZPK)模型传递函数因式分解后可以写成式中, z1 , z2, …,z m称为传递函数的零点, p1,p2,…,p n称为传递函数的极点,k 为传递系数(系统增益)。
在MATLAB 中,直接用[z,p,k]矢量组表示系统,其中z,p,k 分别表示系统的零极点及其增益,即:z=[z1,z2,…,zm];p=[p1,p2,…,pn];k=[k];调用zpk 函数可以创建ZPK 对象模型,调用格式如下:Gzpk = zpk(z,p,k)同样,MATLAB 提供了zpkdata 命令用来提取系统的零极点及其增益,调用格式如下:[z,p,k] = zpkdata(Gzpk) 返回cell 类型的零极点及增益;[z,p,k] = zpkdata(Gzpk,’v’) 返回向量形式的零极点及增益;函数pzmap 可用于求取系统的零极点或绘制系统得零极点图,调用格式如下:pzmap(G) 在复平面内绘出系统模型的零极点图。
北京理工大学自动控制matlab实验报告概要
软件工具在控制系统分析和综合中的应用实验MATLAB 班级:01811001学号:1120100209姓名:戚煜华一、试验目的:1.了解MATLAB这种强大的数学软件的基本特点和语言特点。
2.掌握控制系统在MATLAB中的描述。
3.学会用MATLAB的Control工具箱中提供的仿真函数,例如连续时间系统在阶跃输入激励下的仿真函数step(),脉冲激励下的仿真函数impulse()等。
4掌握典型一阶、二阶系统中参数的变化对阶跃响应曲线的影响;5掌握使用MATLAB绘制控制系统的根轨迹图,并了解附加开环零、极点对闭环根轨迹的影响。
6.学会使用MATLAB绘制系统频率特性曲线—乃氏图和伯德图,并利用MATLAB 求出系统的稳定裕度。
7.掌握系统串联校正后,开环指标及时域响应指标的变化规律。
二、试验设备:一台装有MATLAB软件的电脑三、试验内容:1为例,令T=0.1,1,10,绘制其单位阶跃响应曲线,并?(Gs) 2.以传函1Ts?总结给出惯性时间常数对阶跃响应影响的结论。
时的单位阶跃响应曲线T=0.1T=1时的单位阶跃响应曲线T=10时的单位阶跃响应曲线结论:惯性时间常数T越大,上升时间、调节时间和延迟时间越长。
2?分,,,,为对象,令,n?s)=1=030.2.0.5以传函1G1.5(??n???nn22?2ss?分别绘制阶跃响应曲线,进行,,,别绘制阶跃响应曲线。
令101=0.1=0.7??n对二阶阶跃响应的影响分析。
、??n :,=0=1??n时,分析:=1?n?,零阻尼,响应为无阻尼等幅振荡;=0??的增大,振荡幅值减小,响应速度变慢,超调量和,欠阻尼,随着0.5=0.2减小;?,临界阻尼,响应变慢,超调和振荡消失;=1?,过阻尼,系统没有超调,且过渡时间较长。
=1.5??以后,系统没有了超越大,振荡幅值越小,过渡时间越长;综上所述,>=1?对二阶系统的影响是改变系统的振荡幅值和过渡时调和振荡。
北理工自控实验报告四
实验4 系统的频率特性分析一、实验目的1. 学习和掌握利用MATLAB 绘制系统Nyquist 图和Bode 图的方法。
2. 学习和掌握利用系统的频率特性分析系统的性能。
二、实验原理系统的频率特性是一种图解方法,分析运用系统的开环频率特性曲线,分析闭环系统的性能,如系统的稳态性能、暂态性能常用的频率特性曲线有Nyquist 图和Bode 图。
在MATLAB 中,提供了绘制Nyquist 图和Bode 图的专门函数。
1. Nyquist 图nyquist 函数可以用于计算或绘制连续时间LTI 系统的Nyquist 频率曲线,其使用方法如下:nyquist(sys) 绘制系统的Nyquist 曲线。
nyquist(sys,w) 利用给定的频率向量w 来绘制系统的Nyquist 曲线。
[re,im]=nyquist(sys,w) 返回Nyquist 曲线的实部re 和虚部im ,不绘图。
2. Bode 图bode 函数可以用于计算或绘制连续时间LTI 系统的Bode 图,其方法如下: bode(sys) 绘制系统的Bode 图。
bode(sys,w)利用给定的频率向量w 来绘制系统的Bode 图。
[mag,phase]=bode(sys,w)返回Bode 图数据的幅度mag 和相位phase ,不绘图。
3. 幅度和相位裕度计算margin 函数可以用于从频率响应数据中计算出幅度裕度、相位裕度及其对应的角频率,其使用方法如下: margin(sys)margin(mag,phase,w)[Gm,Pm,Wcg,Wcp] = margin(sys)[Gm,Pm,Wcg,Wcp] = margin(mag,phase,w)其中不带输出参数时,可绘制出标有幅度裕度和相位裕度值的Bode 图,带输出参数时,返回幅度裕度Gm 、相位裕度Pm 及其对应的角频率Wcg 和Wcp 。
三、实验内容1. 已知系统开环传递函数为21000(s)(s 3s 2)(s 5)G =+++绘制系统的Nyquist 图,并讨论其稳定性。
2019自动控制理论实验报告共24页
实验一典型环节的时域响应一、实验目的二、实验设备三、实验原理及内容1.典型环节的方框图及传递函数2.典型环节的模拟电路图及输出响应四、实验结果比例环节①取 R0 = 200K;R1 = 100K积分环节① 取R0 = 200K;C = 1uF② 取R0 = 200K;C = 2uF比例积分环节① 取R0 = R1 = 200K;C = 1uF② 取R0=R1=200K;C=2uF惯性环节① 取R0=R1=200K;C=1uF② 取R0=R1=200K;C=2uF比例微分环节① 取R0 = R2 = 100K,R3 = 10K,C = 1uF;R1 = 100K② 取R0=R2=100K,R3=10K,C=1uF;R1=200K五、心得体会实验二 典型系统的时域响应和稳定分析一、实验目的二、实验设备三、实验原理及内容1、典型的二阶系统稳定性分析 (1) 结构框图图1-2是典型二阶系统的原理方框图,其中T 0=1s ,T 1=0.1s ,K 1分别为10、5、2.5和1。
(2)模拟电路图见图1-3。
(3)理论分析 开环传函:)11.0()1()(11+=+=s s K s T s Ks G 其中:===101/K T K K 开环增益。
(4)实验内容先算出临界阻尼、欠阻尼、过阻尼时电阻R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论值分析基本吻合。
在此实验中T0=1s,T1=0.2s,K1=200/R =>K=200/R闭环传函:2nn 22n2)(ωζωω++=s s s W 其中:2//;/110011n T K T T T K ==ξω四、实验步骤1.将信号源单元的“ST ”端插针与“S ”端插针用“短路板”短接。
由于每个运放单元均设置了锁零场效应管,所以运放具有锁零功能。
将开关设在“方波”档,分别调节调幅和调频电位器,使得“OUT ”端输出的方波幅值为1V ,周期为10s 左右。
自控第四次实验报告

哈工大自动控制原理实验报告姓名: XXX学号: XXXXXXXXXX班级: XXXXXXXX课程名称:自动控制理论实验日期: 2014.XX.XX实验成绩:总成绩:实验三 采用PI 的串联校正一、实验目的:1、了解和观测校正装置对系统稳定性及瞬态特性的影响。
2、验证频率法校正是否满足性能要求。
二、实验要求:1、观测未校正系统的稳定性及瞬态响应。
2、观测校正后系统的稳定性极瞬态响应。
三、实验仪器设备1、TDN-AC/ACS 教学实验系统 一套2、万用表 一块四、实验原理、内容及步骤1、原系统的原理方块图未校正系统的方框图如图3—1所示图3—1未校正系统的方框图要求设计PI 串联校正装置,校正时使期望特性开环传递函数为典型II 型并使系统满足下列指标:%25≤p MS t s 84.0≤校正网络的传递函数为:CS R CS R s G c 011)(+=校正后的方块图如图3—2所示图3—2 校正后的方块图2、系统校正前后的模拟电路图图3—3系统校正前的模拟电路图图3—4系统校正后的模拟电路图3、实验内容及步骤(1)测量未校正系统的性能指标。
准备:将模拟电路输入端R(t)与信号源单元(U1 SG)的输出端OUT端相连接;模拟电路的输出端C(t)接至示波器。
步骤:按图3—3接线;加入阶跃电压,观察阶跃响应曲线,并测出超调量Mp和调节时间Ts,记录曲线及参数。
未校正:MP=34.68%>25%, ts=0.5156<0.84S 不满足指标。
未校正系统分析:开环传函()50(0.061)S D S S =+,特征方程为:250250033S S ++=∴503ω=, 503ξ=, ∴ 2exp()38.78%1P M ξπξ=-=-(2) 测量校正系统的性能指标分析:要求设计PI 串联校正装置,校正时使期望特性开环传递函数为典型二型并使系统满足下列指标:pM <=25%S T <=0.84S校正网络的传递函数为:C G (s )=CS R CS R 011+ 为比例积分环节 K=23R R 为比例放大环节设计校正装置参数由超调量和调整时间的公式Mp=exp(-21ξπ-ξ)100%<=25%得阻尼系数ξ=0.4,带入Ts=3n ξω<=0.84,得剪切频率为ωc=7.87,而ωc 两侧与高频和低频的交接频率ω1和ω2必与ωc 有一定的距离,为保证要求的相角裕度,ω1=7.875=1.57,ω2=7.87*2=15.68则期望的传函为Gc=212.35(0.641)(0.061)s s s ++ 由C G (s )=)106.0(50+S S ,C G (s )=CS R CS R 011+ ,K=23R R可得R1=92.7Ω,C=6.47uF,32R R =0.2,取R3=50k Ω,R2=250k Ω准备:通过实际实验,根据理论计算,设计校正装置参数(实验时与理论计算有一定偏差)R1= 94.7K Ω C =6.7F μR2 = 250 K Ω R3=50 K Ω步骤:按图3—4接线,加入阶跃电压,观察阶跃响应曲线,并测出超调量Mp 和调节时间Ts ,看是否达到期望值,若未达到,请仔细检查接线、参数值并适当调节参数值。
北理工:自动控制实验实验报告汇总
控制理论基础实验班级:05611001学号:1120101327姓名:付予实验时间:周五下午 7、8节指导教师:范哲意实验一:控制系统的模型建立一、实验目的1. 掌握利用MATLAB 建立控制系统模型的方法。
2. 掌握系统的各种模型表述及相互之间的转换关系。
3. 学习和掌握系统模型连接的等效变换。
二、实验原理1. 系统模型的MATLAB描述1)传递函数(TF)模型2)零极点增益(ZPK)模型3)状态空间(SS)模型4)三种模型之间的转换2. 系统模型的连接在实际应用中,整个控制系统是由多个单一的模型组合而成,基本的组合方式有串联连接、并联连接和反馈连接。
三、实验内容1.已知控制系统的传递函数如下22s 18s 40G(s)3 2S 5s 8s 6试用MATLAB建立系统的传递函数模型、零极点增益模型及系统的状态空间方程模型, 并绘制系统零极点图。
实验代码:>> num=[2,18,40];>> den=[1,5,8,6];>> gtf=tf(num,den)>> gzpk=zpk(gtf)实验结果:传递函数模型:gtf =2 s A2 + 18 s + 40s A3 + 5 sA2 + 8 s + 6零极点增益模型:gzpk =2 (s+5) (s+4)(s+3) (sA2 + 2s + 2)状态空间方程模型:gss = >> gss=ss(gtf)>> pzmap(gzpk)>> grid ona =x1x2x3 x1-5-2 1.5x2400x3010b =u1x14x20x3c =x1x2x3 y10.5 1.125 2.5u1=y1 0零极点图形:Pole-Zero Ntato2•已知控制系统的状态空间方程如下0 10 0 0 0 0 10 0 xx u0 0 0 1 0-1 -2 -3 -4 1y 10 2 0 0x试用MATLAB 建立系统的传递函数模型、零极点增益模型及系统的状态空间方程模型,并绘制系统零极点图。
北理工自动控制实验报告,DOC
本科实验报告实验名称:控制理论基础实验)模型、1)传递函数(TF)模型传递函数是描述线性定常系统输入-输出关系的一种最常用的数学模型,其表达式一般为在MATLAB中,直接使用分子分母多项式的行向量表示系统,即num=[bm,bm-1,…b1,b]den=[an,an-1,…a1,a0]调用tf函数可以建立传递函数TF对象模型,调用格式如下:Gtf=tf(num,den)Tfdata函数可以从TF对象模型中提取分子分母多项式,调用格式如下:[num,den]=tfdata(Gtf)返回cell类型的分子分母多项式系数[num,den]=tfdata(Gtf,'v')返回向量形式的分子分母多项式系数2)零极点增益(ZPK)模型传递函数因式分解后可以写成式中,称为传递函数的零点,?称为传递函的极点,k为传递系数(系统增益)。
在即:z=[p=[调用返回向量形式的零极点及增益函数返回的系统零极点,不作图。
3矩阵;B为n×r矩阵,称为输入矩阵或控制矩阵;C为m×n矩阵,称为输出矩阵;D为m×r矩阵,称为直接传输矩阵。
在MATLAB中,直接用矩阵组[A,B,C,D]表示系统,调用ss函数可以创建ZPK对象模型,调用格式如下:Gss=ss(A,B,C,D)同样,MATLAB提供了ssdata命令用来提取系统的A、B、C、D矩阵,调用格式如下:[A,B,C,D]=ssdata(Gss)。
它返回系统模型的A、B、C、D矩阵。
4)三种模型之间的转换上述三种模型之间可以互相转换,MATLAB实现方法如下TF模型→ZPK模型:zpk(SYS)或tf2zp(num,den)TF模型→SS模型:ss(SYS)或tf2ss(num,den)ZPK模型→TF模型:tf(SYS)或zp2tf(z,p,k)ZPK模型→SS模型:ss(SYS)或zp2ss(z,p,k)SS模型→TF模型:tf(SYS)或ss2tf(A,B,C,D)SS模型→ZPK模型:zpk(SYS)或ss2zp(A,B,C,D)2.系统模型的连接在实际应用中,整个控制系统是由多个单一的模型组合而成,基本的组合方式有串联连接、并联连接和反馈连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四次实验
第一部分线性控制系
统的频域分析
一.实验目的:
一、实验目的
1) 了解线性系统频率特性的基本概念。
2) 了解和掌握对数幅频曲线和相频曲线(伯德图)的构造及绘制方法。
3) 了解和掌握利用频率法建模的方法、步骤和基本原理。
4) 掌握二阶开环系统的对数幅频特性L(ω)和相频特性φ(ω),实频特性Re(ω)和虚频特性Im(ω)的计算方法。
5) 了解和掌握欠阻尼Ⅰ型二阶闭环系统中的自然频率Wn、阻尼比ζ对谐振频率Wr和谐振峰值L(Wr)的影响,及Wr和L(Wr)的计算方法。
6) 了解阻尼比ζ对开环参数幅值穿越频率Wc和相位裕度γ的影响及幅值穿越频率Wc和相位裕度γ的计算方法。
7) 了解和掌握Ⅰ型二阶闭环系统对数幅频曲线和相频曲线和幅相曲线的构造方法。
二、实验原理
对于稳定的线性系统,当输入为正弦信号时,其输出也是一个正弦信号,频率和输出信号的频率相同,但幅值和相角发生了变化。
其幅值和相角只与系统参数及输入正弦函数的频率有关,即每改变一次角频率,都将得到一个幅值比和相位差,这两个值分别属于频率特性中的幅频特性和相频特性曲线上的两个点。
不断改变角频率,所测得的一组值构成了频率特性。
对一般系统,输入为
x(t)=Xsin(wt+)
t->∞时:输出为
y(t)=Ysin(wt+)
幅值比为A=,记A(w)幅频特性,相角差为φ= −,φ(w)为相频特性。
频域分析法是应用频率特性研究线性系统的一种经典方法。
它以控制系统的频率特性作为数学模型,以伯德图或其他图表作为分析工具,来研究和分析控制系统的动态。
三.实验内容及步骤
二阶闭环系统的频率特性测试电路如图
(1)按模拟电路连接电路
(2)描绘系统的闭环对数幅频、相频
特性曲线。
用MATLAB画出该二阶闭环系统的伯德图进行对比。
程序如下:
num=25;
den=[0.1,1,25];
sys=tf(num,den);
margin(sys)
[gm,pm,wcg,wcp]=margin(sys
)
所得的结果如图所示:
我们发现与实验所得伯德图基本一致,说明实验结果正确
四、实验总结
通过本次实验,我们了解了线性系统频率特性的基本概念,并掌握了对数幅频曲线和相频曲线(伯德图)的构造及绘制方法,学会了利用频率法建模的方法、步骤和基本原理。
五、思考题
1. 实验建模和机理建模有何不同?在什么情况下采用实验建模?
答:实验建模是建立在实验之上的,我们不知道其内部机理,即通过实验来得到输入与输出的关系,进而分析系统的作用。
而机理建模是建立在系统的内部机理之上,列写出方程式,从而获取系统的数学模型,通过模型来分析系统。
在不知道系统内部构成,系统机理复
杂,不易机理建模,或者对系统内部
某一机理不是很清楚时,就通过实验
建模的方法,得到输入与输出的关系,
进而分析系统。
2. 采用相同的实验原理和方法,分别完成对积分和比例积分微分系统的传递函数的推导。
答:积分环节传递函数为
G(s)==
比例积分微分环节的传递函数为
G(s)= =Kp++KpTds
3. 改变系统的开环传递函数,增加或减少积分环节,观察其相频曲线中相角的变化从而分析思考积分环节的作用。
答:积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。
积分环节的作用使系统消除稳态误差,提高无差度。
4. 说明实际应用中,开环和闭环的不同。
答:开环没有反馈而闭环有反馈。
5. 仔细观察对比开环和闭环幅频特性,可以发现在低频和高频段两条曲线趋向重合,请分析原因。
答:在低频和高频段,开环和闭环的幅频率特性逐渐趋向于相同的状态,所以两条曲线逐渐趋向重合,而在中频段,闭环和开环的幅度受到频率的影响较大所以两条曲线的差别较大。
第二部分串联超前校正
一、实验目的
1) 了解和掌握超前校正的原理。
2) 了解和掌握利用闭环和开环的对数幅频特性和相频特性完成超前校正网络的参数的计算方法。
3) 掌握在被控系统中如何传入超前校正网络,构建一个性能满足指标要求的新系统的方法。
二、实验原理
控制系统的校正与状态反馈是在被控对象已确定,在给定性能指标的前提下,要求设计者选择控制器(校正网络)的结构和参数,使控制器和被控对象组成一个性能满足指标要求的系统。
频域法校正主要是通过被控对象开环对数幅频特性和相频特性(伯德图)观察和分析实现的。
超前校正的原理是利用超前校正网络的相角超前特性,使中频段斜率由-40dB/dec 变为-20dB/dec并占据较大的频率范围,从而使系统相角裕度增大,动态过程超调量下降,并使系统开环截止频率增大,闭环系统带宽增大,响应速度也加快。
三、实验内容及步骤
1) 按照模拟电路图连接电路。
其开环传递函数G(s)=
2) 为便于实验中响应曲线的观察,由函数发生器输出矩形波(连续的正输出的阶跃信号)作为输入系统的输入Ui,用虚拟示波器的两个通道分别采集系统的输入和输出信
号。
运行相关程序,选择“线性系统时域分析”选项,再单击“启动实验项目”按钮,弹出实验界面,调节函数发生器使之输出矩形波幅度为2.5V左右,正脉冲宽度≥3s。
3) 运行、观察、记录。
单击“开始”按钮,得到一个完整波形之后,单击“停止”按钮,用示波器观察系统阶跃响应,被测系统输出的时域特性曲线
然后移动游标测量超调量、峰值时间及调节时间。
未校正系统的时域特性曲线
超调量为Mp=57.2%,峰值时间为tp=0.332s,调节时间为ts=1.8s
运用matlab画出伯德图
在未校正系统模拟电路的开环伯德图上测得未校正系统的相位裕度γ=19°。
加入串联超前校正后系统的时域特性曲线以及运用matlab绘制的伯德图
实验结果:系统校正之前超调量为57.2%,调节时间为1.8s,加入超前校正环节,超
调量变为了17.7%,调节时间变为了
0.38s,可以发现系统得到了极大的改善。
四、实验总结
通过实验,我们掌握了运用系统的伯德图来得到系统的串联超前校正的参数的计算方法,学会了用基本环节来构建超前校正网络的方法。
五、思考题
思考超前校正和滞后校正的优缺点,以及实际应用中的结合。
答:在频域上,超前会提高开环截止频率和相位裕量,滞后会降低开环截止频率,这是频域上最明显的特征。
时域上比较直观,超前校正可以改善动态性能
但是由于对高频噪声的抑制能力减小了,所以抗干扰能力下降,滞后校正可以改善稳态性能和增大稳定裕度,但是相对的也会使响应速度变慢。
实际应用中,经常将二者结合起来使用,用超前校正来改善动态性能,提高系统响应速度,用滞后校正改善稳态性能,提高稳态精度。
二者结合,会使系统得到很好的校正。