无人机数据后处理软件
PIE-UAV 无人机影像数据处理软件PIE-UAV 用户手册说明书
PIESATPIE-UA V用户手册北京航天宏图信息技术股份有限公司目录1软件概述 (2)2安装说明 (4)1.1运行环境配置 (4)1.2软件安装注册说明 (4)1.3技术支持 (4)3软件详解 (5)3.1处理流程 (5)3.2数据准备 (5)3.2.1相片 (5)3.2.2位置信息 (6)3.2.3相机检校参数 (7)3.3界面及功能介绍 (7)3.3.1工程 (7)3.3.2运行 (8)3.3.3处理 (8)3.3.4影像显示 (9)3.3.5影像量测 (10)3.3.6视图 (11)3.3.7帮助 (13)4无控处理操作流程 (13)4.1新建工程 (13)4.2任务执行 (19)4.2.1工程设置 (19)4.2.2一键式处理 (20)4.2.3分步处理 (20)5有控处理操作流程 (21)5.1新建任务 (21)5.2任务执行 (21)5.2.1工程设置 (21)5.2.2空三解算 (22)5.2.3控制点编辑 (22)5.2.4有控区域网平差 (24)5.2.5创建DSM/DEM (25)1软件概述PIE-UAV是一款功能强大且易用的无人机航拍数据处理软件。
它无需人工干预,便可快速完成空三解算、DEM生成、正射影像拼接等一系列任务,从而生成标准化的DEM和DOM产品。
软件具有以下特性:操作简便通过向导式的步骤建立好工程,即可一键完成空三解算、DEM生成、DOM生成等所有过程。
用户不必掌握专业的摄像测量知识,通过简单的培训就能使用。
速度快原生64位软件,采用多核处理器和GPU联合加速,参考了世界上最新的计算机视觉和人工智能的研究成果,研发出一套具有国际领先水平的算法,使得该软件的处理效率在同行业内具有绝对的领先水平。
精度高空三解算的中误差优于0.5个像元。
支持地面控制点通过添加地面控制点,正射影像和高程可以达到测绘精度。
软件自检校功能软件可以通过相片进行自动近似解算相机畸变参数,即使相机没有事先经过检校,也可以进行处理。
无人机后期航片拼接软件PhotoScan详细使用教程

无人机后期航片拼接软件PhotoScan详细使用教程摘要:本文主要介绍一款无人机航片后期处理软件——Agisoft Photoscan,手把手教你完成航片正射影像拼接、生成DEM。
PhotoScan是一款基于影像自动生成高质量三维模型的软件。
使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。
无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。
整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。
PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM模型。
使用控制点可达5cm精度。
完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。
航片拼接软件有很多,之前我们使用过Pix4D、Global mapper、EasyUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan 的表现都要好于其他几款。
Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。
对电脑硬件的依赖也比其他要低。
很多人在用的Pix4DMapper是瑞士一家公司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。
PhotoScan优势盘点:支持倾斜影像、多源影像、多光谱影像的自动空三处理支持多航高、多分辨率影像等各类影像的自动空三处理具有影像掩模添加、畸变去除等功能能够顺利处理非常规的航线数据或包含航摄漏洞的数据支持多核、多线程CPU运算,支持CPU加速运算支持数据分块拆分处理,高效快速地处理大数据操作简单,容易掌握处理速度快不足:缺少正射影像编辑修改功能缺少点云环境下量测功能功能介绍:1.软件安装(安装大概15分钟)官网下载软件,安装。
飞马 LIDAR 数据后处理软件_智点云使用说明书
2.5.3 多边形选择......................................................................................................32
2.5.4 减选.................................................................................................................. 33
1.3
软件启动.................................................................................................................... 9
2 飞马 LIDAR 数据后处理软件功能介绍..................................... 9
2.2.2 缩小.................................................................................................................. 16
2.2.3 旋转.................................................................................................................. 17
2.5.7 保存裁切..........................................................................................................35
测绘技术的无人机摄影处理软件推荐

测绘技术的无人机摄影处理软件推荐随着科技的快速发展,无人机已成为现代测绘技术中不可或缺的一部分。
无人机搭载的高分辨率相机,可以迅速拍摄大面积的地理图像,为测绘领域带来了革命性的变化。
然而,仅仅拥有无人机并不足以完成精确而高效的地图制作工作,我们还需要先进的摄影处理软件来处理和分析这些图像数据。
下面,我将为您推荐几款在测绘技术中广泛使用的无人机摄影处理软件。
首先,我要推荐的是Pix4Dmapper。
Pix4Dmapper是一款功能强大的无人机摄影处理软件,它可以将无人机拍摄的照片转化为高精度和高分辨率的三维模型和地图。
这款软件利用先进的图像处理和计算机视觉算法,能够自动识别和匹配不同照片之间的特征点,并根据这些特征点生成准确的三维模型。
Pix4Dmapper支持导入包括RGB、红外和多光谱图像在内的多种图像类型,并可提供各种测量和分析工具,满足不同测绘项目的需求。
其次,我要介绍的是Agisoft Metashape。
作为另一款备受好评的无人机摄影处理软件,Agisoft Metashape的功能也非常强大。
它可以根据无人机拍摄的照片生成高质量的地图、数字表面模型和点云。
该软件还提供了丰富的工具,用于地形分析、检测地表变化和测量等。
Agisoft Metashape还支持单一相机站点的精确测量,无需相同区域的交叉点对,这使得它在一些特殊测绘项目中表现出色。
另外一款不容忽视的软件是DroneDeploy。
不同于上述两款软件,DroneDeploy 是一款定位于商业用户的云端测绘软件。
它提供了无人机航线规划、飞行数据导入、图像处理以及结果分析的全套解决方案。
用户只需将无人机拍摄的照片上传至云端,DroneDeploy会自动处理和分析这些图像,并生成丰富的地图和报告。
DroneDeploy还支持实时数据传输,用户可以在飞行过程中实时查看和分析图像数据,提高测绘效率和数据质量。
除了上述推荐的软件,市场上还有许多其他优秀的无人机摄影处理软件,例如Photoscan等。
Photoscan使用说明书
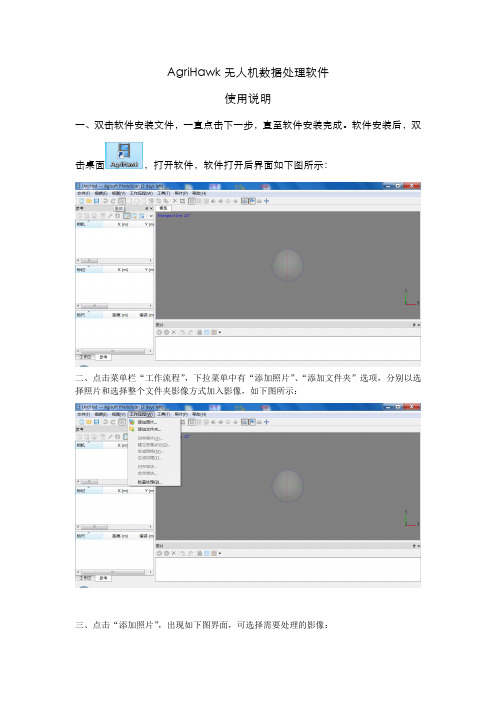
AgriHawk无人机数据处理软件使用说明一、双击软件安装文件,一直点击下一步,直至软件安装完成。
软件安装后,双击桌面,打开软件,软件打开后界面如下图所示:二、点击菜单栏“工作流程”,下拉菜单中有“添加照片”、“添加文件夹”选项,分别以选择照片和选择整个文件夹影像方式加入影像,如下图所示:三、点击“添加照片”,出现如下图界面,可选择需要处理的影像:四、选择影像后,在左侧会出现影像名列表,软件下侧会显示影像缩略图:五、双击每个缩略图,主窗口显示该张影像的大图,可以查看影像:六、如果有POS数据,点击左侧窗口“参考”栏中第一个图表,导入POS数据,若没有POS 数据可直接跳至步骤十一(POS数据为拍摄每张影像所对应的无人机位置、姿态参数,辅助拼接,拼接后的影像将具有地理坐标信息):七、点击“导入”后,弹出POS导入窗口,如下图,选择整理好的POS文档即可:八、POS导入后,选择“WGS84”坐标系统,并将各列数据与表头名称对应:九、对应好的POS界面如下图所示:十、POS数据导入后,界面中将显示POS轨迹,即无人机拍摄照片时所处空间位置:十一、点击“工作流程-对齐照片”:十二、在弹出的对话框中,精度选择“高”,成对预选选择“参考”,点击确定:十三、下图自动开始“对齐照片”处理,界面如下图,此过程只需等待,无需操作:十四、处理完成后,会生成三维点云数据,如下图所示:十五、“对齐照片”完成后,点击“工作流程-建立密集点云”:十六、在弹出的对话框中,选择所需要的质量,如下图,质量设置越高,处理速度越慢:十七,点击确定后,系统自动处理,并显示处理进度:十八、处理完成后,生成密集点云数据:十九、选择“工作流程-生成网格”,如下图:二十、在弹出的对话框中选择所需要的质量,点击确定,出现以下进度显示界面:二十一、处理完成后,生成测区光滑曲面:二十二、点击“文件-导出正射影像-导出JPEG/TIFF/PNG”,导出拼接后影像:二十三、在弹出的界面中,直接默认设置即可,点击“导出”:二十四、点击“导出”后,选择导出路径及导出文件名:二十五、点击确定后,开始导出,等待完成后,即可到相应路径下,查看拼接后正射影像。
航测数据后处理软件及方法推荐
航测数据后处理软件及方法推荐航测数据的后处理在测绘领域中扮演着至关重要的角色。
通过对航测数据的处理和分析,可以得到精确、高质量的地理信息数据,为地理信息系统、土地规划、资源管理等领域提供可靠的数据支持。
本文将推荐几款常用的航测数据后处理软件和方法,并探讨其适用场景和优劣势。
一、航测数据后处理软件1. ENVIENVI是一款功能强大的遥感图像分析软件,具有图像处理、分类、变化检测、目标识别等多种功能。
在航测数据的后处理中,ENVI可以用于影像配准、地物分类和高程模型生成。
它提供了丰富的算法和工具,能够处理不同分辨率的航测数据。
2. Pix4DmapperPix4Dmapper是一款专业的无人机航测数据处理软件,主要用于无人机航测数据的处理和三维建模。
它可以将无人机采集到的航测图像进行自动配准和拼接,生成高精度的地形模型和三维模型。
Pix4Dmapper还提供了丰富的分析工具,可以进行体积计算、变形分析等操作。
3. Erdas ImagineErdas Imagine是一款功能全面的遥感图像处理软件,主要用于航测数据的处理、分析和制图。
它支持多种数据格式,包括数字摄影测量系统(DGPS)、激光雷达、航空摄影等。
Erdas Imagine具有强大的图像处理和分析功能,可以进行几何校正、影像融合、地物提取等操作。
二、航测数据后处理方法1. 影像配准航测数据中的图像可能存在位置偏差和旋转,需要进行影像配准以消除这些误差。
影像配准可以采用基于特征匹配的方法,如SIFT、SURF等,也可以使用控制点进行配准。
其中,SIFT是一种基于局部特征的图像配准算法,可以自动提取图像中的稳定特征点,并通过匹配这些特征点来实现图像配准。
2. 高程模型生成航测数据中的高程信息对于地理信息系统和土地规划非常重要。
高程模型可以通过航测数据中的点云数据或影像进行生成。
常用的高程模型生成方法包括插值法和立体视差法。
插值法可以通过对离散的高程数据进行插值,得到连续的地形表面。
Pix4Dmapper介绍PPT

Pix4Dmapper行业案例
采矿
自动生成的DSM和DOM产品
Pix4Dmapper行业案例
采矿
通过计算土方量
Pix4Dmapper行业案例
自然资源管理
Pix4Dmapper行业案例
自然资源管理
点云数据
Pix4Dmapper行业案例
自然资源管理
DSM结果
DOM结果
Pix4Dmapper行业案例
Pix4Dmapper行业案例
应急灾害——基于泥石流和洪水灾害后无人机近景摄影
相机:DMC-TS2(35mm) 张数:573 影像 分辨率:20cm 经过处理后正射影像可以第一时间确定泥石流和洪水受灾的区域 担任该项目的工程师作为规划的援助,为清理现场,对受损基础设施修复 工作,现有的保护土坝的适应。随着交付的地理数据,该项目的地质学家 是拥有非常精确,地理参考信息来记录的事件。这允许地质学家重新评估 GCP:18个 面积:450公顷
林业调查
矢量化
获得树的高度
Pix4Dmapper行业案例
农业
相机:RGB 相机和RGNIR相机(定焦) GRDIGITAL2_5.9_2736x3648 张数:498 影像 GRDIGITAL3_6.0_2736x3648 面积:0.39平方公里
分辨率:4.18 cm
Pix4Dmapper行业案例
Google Earth即可浏览成果。
Pix4Dmapper特色
自动生成带纹理的三维模型
自动生成带有纹理信息的三维模型,方便进行三维景观制作。
Pix4Dmapper特色
• 生成正射校正镶嵌结果
生成所有影像的正射校正结果,并自动匀色及镶嵌。
飞马机器人 无人机管家 数据处理软件说明书

无人机管家数据处理软件说明书编制:深圳飞马机器人科技有限公司版本号:V0.1日期:2019-3-26目录1.概述 (1)2.配置与权限 (1)软件权限 (1)配置要求 (2)3.智检图 (2)3.1.功能说明 (2)3.2.智检图流程 (11)4.智理图 (26)4.1.GPS处理 (27)4.2.图像处理 (44)4.3.实用工具 (59)4.4.图像批处理 (73)4.5.常见问题 (73)5.智拼图 (75)5.1.功能说明 (75)5.2.快拼流程 (86)1.概述本文档主要讲述【无人机管家】软件各模块功能应用和对应不同飞机、不同需求所涉及的操作说明,包含功能介绍、数据获取后数据质检、数据预处理、数据快拼处理流程。
【无人机管家】是无人机数据获取、处理、展示、管理以及无人机维护的一站式智能GIS系统,支持固定翼、旋翼、复合翼等种类丰富的飞行平台,满足各种应用需求的航线模式,支持真三维地形数据的精准三维航线规划、三维实时飞行监控、快速飞行质检,具有功能多样化的数据预处理工具箱,支持稳健的精度控制和自动成图、丰富的4D和三维产品生产,以及无人机可视化监控中心,提供系统升级、智能维护、信息推送等云服务。
【无人机管家】软件主要模块分别为:【智检图】(数据检查)、【智理图】(数据预处理)、【智拼图】(DSM+TDOM、DOM、三维数据生产)、【智激光】(LIDAR数据生产)。
无人机管家除支持飞马系列获取的数据外,还支持大疆精灵4rtk、御2、等相机数据。
2.配置与权限软件功能权限软件权限配置:最低配置系统支持Widows7SP1(64)、Windows8(64)、Windows10(64)CPU Intel双核处理器内存RAM(8GB)显卡NVIDIA显卡、显存1GB及以上推荐配置系统支持Widows7SP1(64)、Windows8(64)、Windows10(64)CPU Intel Core i7处理器及以上内存64G、128G显卡NVIDIA显卡1080ti、显存2GB及以上配置要求管家界面3.智检图【智检图】是专业用于航飞质量现场检查及评估分析的自动化软件、可以快速获得航飞质量报告、提高无人机数据质检工序的效率及后期处理的可靠性。
无人机后期航片拼接软件PhotoScan详细使用教程

无人机后期航片拼接软件PhotoScan详细使用教程摘要:本文主要介绍一款无人机航片后期处理软件——Agisoft Photoscan,手把手教你完成航片正射影像拼接、生成DEM。
PhotoScan是一款基于影像自动生成高质量三维模型的软件。
使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。
无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。
整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。
PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM模型。
使用控制点可达5cm精度。
完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。
航片拼接软件有很多,之前我们使用过Pix4D、Global mapper、EasyUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan 的表现都要好于其他几款。
Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。
对电脑硬件的依赖也比其他要低。
很多人在用的Pix4DMapper是瑞士一家公司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。
PhotoScan优势盘点:支持倾斜影像、多源影像、多光谱影像的自动空三处理支持多航高、多分辨率影像等各类影像的自动空三处理具有影像掩模添加、畸变去除等功能能够顺利处理非常规的航线数据或包含航摄漏洞的数据支持多核、多线程CPU运算,支持CPU加速运算支持数据分块拆分处理,高效快速地处理大数据操作简单,容易掌握处理速度快不足:缺少正射影像编辑修改功能缺少点云环境下量测功能功能介绍:1.软件安装(安装大概15分钟)官网下载软件,安装。
测绘技术中的无人机航测数据处理软件推荐与分析

测绘技术中的无人机航测数据处理软件推荐与分析无人机(Unmanned Aerial Vehicle,简称无人机)航测数据处理是现代测绘技术中的重要一环。
在过去,进行航测需要依靠传统的测量方法和工具,不仅效率低下,而且准确度也无法满足高精度测绘的要求。
然而,随着无人机技术的飞速发展,无人机航测成为了一种高效、精确的测绘方法。
而无人机航测数据的处理软件则成为了保证测绘数据准确性和高效性的关键因素。
在无人机航测中,数据的获取是首要任务。
航测无人机搭载的是一系列的测量设备,例如相机、激光雷达等。
这些设备利用无人机飞行的高度和速度,能够快速获取大范围的地面数据。
然而,这些数据的处理却需要依靠专业的软件来完成。
因此,选择一款适合的无人机航测数据处理软件显得尤为重要。
目前市面上存在着众多的无人机航测数据处理软件,每款软件都有其独特之处,下面就让我们一起来看看一些常用的软件以及它们的特点。
首先,Pix4Dmapper是一款被广泛使用的无人机航测数据处理软件。
它具有良好的数据处理和地图生成能力,能够将无人机采集到的照片快速、高效地处理成数字地图。
Pix4Dmapper还支持三维模型的创建和测量,可以在建筑、农业、环境等领域应用。
此外,Pix4Dmapper还具备友好的用户界面和可视化操作,使得软件的学习和使用变得简单便捷。
其次,Agisoft Metashape是另一款得到广泛认可的无人机航测数据处理软件。
与Pix4Dmapper类似,Agisoft Metashape也具有强大的数据处理和地图生成功能。
它能够高效地处理无人机采集到的照片,并生成高精度的数字地图和三维模型。
Agisoft Metashape还支持多种数据格式的导入和导出,方便与其他软件进行数据交换和共享。
此外,软件还提供了通用的API接口,便于用户进行二次开发和定制。
此外,Global Mapper也是一款备受推崇的无人机航测数据处理软件。
相比于前两款软件,Global Mapper更加注重地理信息系统(Geographic Information System,简称GIS)的功能。
Pix4UAV处理无人机数据操作流程
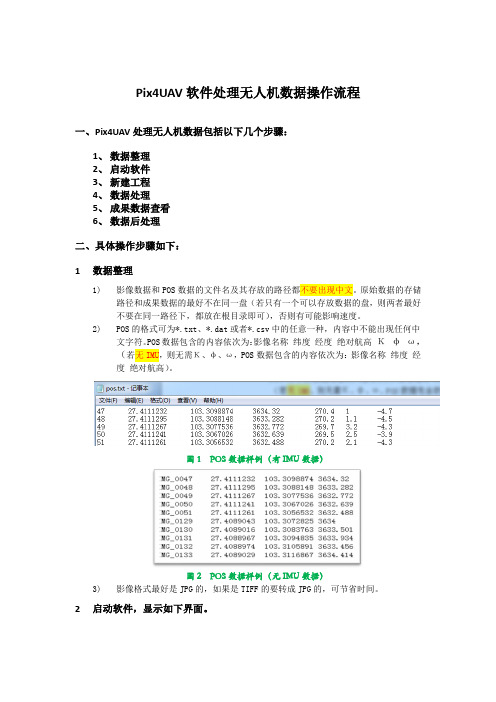
Pix4UAV软件处理无人机数据操作流程一、Pix4UAV处理无人机数据包括以下几个步骤:1、数据整理2、启动软件3、新建工程4、数据处理5、成果数据查看6、数据后处理二、具体操作步骤如下:1数据整理1)影像数据和POS数据的文件名及其存放的路径都不要出现中文。
原始数据的存储路径和成果数据的最好不在同一盘(若只有一个可以存放数据的盘,则两者最好不要在同一路径下,都放在根目录即可),否则有可能影响速度。
2)POS的格式可为*.txt、*.dat或者*.csv中的任意一种,内容中不能出现任何中文字符。
POS数据包含的内容依次为:影像名称纬度经度绝对航高Κφω,(若无IMU,则无需Κ、φ、ω,POS数据包含的内容依次为:影像名称纬度经度绝对航高)。
图1 POS数据样例(有IMU数据)图2 POS数据样例(无IMU数据)3)影像格式最好是JPG的,如果是TIFF的要转成JPG的,可节省时间。
2启动软件,显示如下界面。
3新建工程1)点击Project菜单,从列表中选择New Project。
2)弹出如下对话框,定义工程存放路径和工程名称。
点击Browse按钮,弹出如下对话框,定义工程存放的路径。
工程路径和工程名定义完成后,界面显示如下。
3)点击Next按钮,弹出加载影像数据的界面。
点击按钮,找到影像数据存放的路径并选中待处理的影像加载,加载数据完成后,显示界面如下。
4)点击next按钮,显示如下界面。
定义坐标系、相机参数,并导入POS数据。
①坐标系设定。
若默认的坐标系正确,则无需更改。
若不正确,则点击Images coordinate system选项卡中的按钮,弹出如下的定义坐标系界面。
可以通过点击来选择投影和坐标系;也可以通过导入通用的prj文件来定义坐标系。
②相机模型设定。
相机模型的核查、修改或自定义。
在Camera model选项卡中点击按钮。
显示如下界面。
点击Edit按钮可修改相机参数,修改完成后点击保存按钮;点击New按钮,定义新的相机模型,输入相机名称和相机参数,定义完成后点击保存按钮。
低空无人机数据后处理完整解决方案——航天远景

五、案例
•01
➢湖南长沙市郊某小区基础测绘
1.空三加密 2.DEM和DOM 生产 3.DLG生产
整个项目作业概况
采用英特尔i7 920处理器电脑处理,除了前期建 工程和添加像控点平差解算外,其余部分全自动处 理,整个空三加密自动化程度达80%以上,周期为电 脑自动处理12个小时加单作业员人工刺像控点平差4 个小时。
二、无人机小数码影像的缺点
• 2. 排列不整齐
•受顺风、逆风和侧风影像大, 加上俯仰角和侧滚角的影响,航 带的排列不整齐,主要表现在重 叠度(包括航向和旁向重叠度) 的变化幅度大,甚至可能出现漏 拍的情况。
二、无人机小数码影像的缺点
• 3. 旋偏角大
•受侧风和不稳定气流影响, 相邻两张影像一般容易出现旋 偏角变化特别大(远超传统航 测规范要求)的情况。
(下图为水域面积为80%左右,同时 影像拍摄角度相差90度,程序依旧能 匹配出足够的高精度连接点)。
② 利用CPU多核并行和GPU并行计算,大大提高了匹配速度。
四、航天远景无人机小数码影像解决方案
➢ 空三加密
③ 直接支持数码相机输出的JPG格式或TIF格式,无需格式转换。
④ 无需影像预旋转,横排、纵排都可实现自动转点,节约数据准备时间。 ⑤ 实现畸变改正参数化,方便用户修正畸变改正参数,不需要事先对影像
产品组成
四、航天远景无人机小数码影像解决方案
•FlightMatrix •DATMatrix V1.0 •MapMatrix V4.0 •EPT V1.1
四、航天远景无人机小数码影像解决方案
测区工程创建
•FlightMatrix全区影像图 快速拼接系统
Rocky PPS无人机后差飞软件
图 14 成果报表展示
图 7 POS 信息区
三、软件说明
3.1 工程的创建
点击菜单栏中的文件按钮,会弹出
下拉菜
单,点击打开按钮,会弹出如下对话框。我们也可以点击工具栏中
快速完成操作。
图 8 工程创建 在上述的对话框中,我们将进行以下操作流程: 1、选定工程所需的几个重要文件,包括原始 POS 数据文档、飞 载流动站数据文档、相片曝光时刻文档、相片文件夹。 我们可以选择手动输入各要素的地址,也可以在点击输入栏后方 的按钮,在弹出的对话框中选择位置。
一、设备要求
支持系统: · Windows XP · Windows 7 32bit · Windows 7 64bit · Windows 8 64bit · Windows 10 64bit
推荐硬件配置: ·处理器:Intel Core i3/i5/i7 ·内存: 8GB ·显卡:nVidia GeForce (any)
大化和还原操作。如无需显示,亦可关闭显示区。 各区域的功能与显示内容如下所述:
1、菜单栏 菜单栏主要功能是管理软件的全局,包括工程的创建与运行、视
图管理、各项参数设置等。具体界面如下:
图 2 菜单栏 2、工具栏
工具栏主要功能是帮助实现软件的快速使用操作,主要内容包括 工程快速创建、开启解算。具体界面如下:
原始轨迹、解算后轨迹、原始与解算后比对轨方式,包括图标、线条、图标线条双显。
具体成果如下所示:
图 13 解算航迹图展示
图 14 解算数据展示
成解算后,我们也可以生成具体的成果报表,来展示整个工程的 整体情况,报表可以根据需求来导出和打印。报表的具体内容包括: 工程概述、无人机流动站信息概况、卫星信息概况、解算精度报告。 具体的内容如下图所示:
Trimble UASMaster无人机数据处理测试报告

Trimble UASMaster无人机数据处理测试报告目录1. UASMaster处理无人机航片所需数据 (2)2. 无人机数据处理 (4)2.1 航测数据处理工程准备 (5)2.2 航测数据自动空三、连接点提取与校正处理 (8)2.3 创建数字表面模型与正射镶嵌影像 (11)3. UASMaster摄影测量系统介绍 (14)1. UASMaster处理无人机航片所需数据1.1相机检校参数(焦距mm、影像大小pix、像元大小um、主点偏移PPA或PPS及畸变差等)图1 相机标定参数1.2影像数据(Tif或Tif jpeg格式)图2 航片数据1.3航迹线数据(定位定姿数据)无人机影像的概略外方位元素,经纬度坐标以及姿态参数,大地平面坐标系统图3 航迹线数据1.3地面控制点数据通常情况下,无人机航测图像像幅小,基高比小、姿态不稳定,需要通过像控点进行校正处理。
2. 无人机数据处理图 4 Trimble UASMaster系统主界面2.1 航测数据处理工程准备在工程准备(Project Preparation)中,可创建新的航测数据处理工程,或者打开已创建的工程,或者对已有的工程进行编辑。
2.1.1创建航测数据处理工程点击“新建(New…)”按钮,开始工程创建。
图 5 Trimble UASMaster工程准备界面在弹出工程创建窗口中,依次进行相机参数初始化设置、航测图像、航迹线数据、像控点数据导入,并根据航迹线数据与航测图像数据进行航带创建,使航带与航测图像一一匹配。
图 6 Trimble UASMaster工程参数初始化设置界面2.1.1.2创建或设置相机内标定参数将无人机系统相机标定参数通过”Ca mera/Sensors“设置界面进行参数输入与设置。
图 7 相机参数设置2.1.1.3导入无人机航测图像通过”photos-Frame Types“选项导入航测图像。
图 8 航片数据导入2.1.1.4导入航迹线通过“GNSS/IMU-ApproxEO“导入航迹线文件。
无人机航片处理软件
⽆⼈机航⽚处理软件⼀、ERDAS LPS(Leica Photogrammetry Suite)是徕卡公司推出的遥感及摄影测量系统。
主要为处理地球空间影像提供了精密和⾯向⽣产的摄影测量⼯具。
LPS可以处理来⾃多种航天、航空传感器的多种格式影像,包括⿊/⽩、彩⾊和最⾼⾄16bits的多光谱等各类数字影像。
ss⼆、DPGRID新⼀代数字摄影测量⽹格数字摄影测量⽹格(Digital Thotogrammetry Grid--DPGrid)是由中国⼯程院院⼠、武汉⼤学教授张祖勋提出。
DPGrid数字摄影测量⽹格系统打破传统的摄影测量流程,集⽣产、质量检测、管理为⼀体,合理地安排⼈、机的⼯作,充分应⽤当前先进的数字影像匹配、⾼性能并⾏计算、海量存储与⽹络通讯等技术,实现航空航天遥感数据的⾃动快速处理和空间信息的快速获取,其性能远远⾼于当前的数字摄影测量⼯作站,能够满⾜三维空间信息快速采集与更新的需要,实现为国民经济各部门与社会各⽅⾯提供具有很强现势性的三维空间信息。
2007年7⽉12⽇,该产品通过国家鉴定,鉴定结论:“该系统研究思想新颖、研究成果先进,将为数字摄影测量的新⼀轮跨越式发展、为建⽴⼤规模的摄影测量数据处理中⼼和三线阵卫星影像的快速处理奠定基础。
该系统整体上达到国际先进⽔平,其中数字摄影测量⽹格DPGrid并⾏处理技术、影像匹配技术和⽹络全⽆缝测图技术达到国际领先⽔平”。
新⼀代航空航天数字摄影测量处理平台DPGrid,填补了我国数字摄影测量数据处理技术的空⽩,标志着我国数字摄影测量技术整体上达到国际先进⽔平。
具有⾃主版权的⾼性能新⼀代航空航天数字摄影测量处理平台DPGrid,可以推⼴应⽤于国家基础测绘、城市基础地理信息动态更新、国⼟资源调查、⽣态环境监测、灾害监测、海洋资源、农业监测、快速响应等各个领域,⼤幅度地提⾼航空航天遥感影像数据处理的效率,缩短地图更新周期,提⾼空间信息获取的实时性,特别是对⼤型的⾃然灾害的快速评估、应急反映的⽅⾯,对于我国的社会经济发展以及军事安全等都具有重要的意义。
无人机航测数据处理软件Pix4Dmapper与APS比较
无人机航测数据处理软件Pix4Dmapper与APS比较作者:柴玉坤谭荣杰来源:《中国科技纵横》2017年第17期摘要:随着无人机技术的成熟,利用无人机进行航空摄影测量已经成为摄影测量的一个最新发展方向。
航测数据处理软件是无人机航测的关键之一,本文就Pix4Dmapper和APS两款比较成熟的无人机航测数据处理软件,通过某测区数据处理分析,进行比较,了解其各自特性。
关键词:无人机;航测数据处理;Pix4Dmapper APS中图分类号:P23 文献标识码:A 文章编号:1671-2064(2017)17-0031-021 软件概述Pix4Dmapper全自动快速无人机数据处理软件,是世界领先的无人机数据处理软件提供商Pix4D公司的核心产品。
Pix4Dmapper采用创新科技,仅利用影像内容,自动处理从地面获取的、或轻型无人机和大飞机获取的航空影像,生成3D点云、DSM、DOM等高精度,可定制的成果。
APS是意大利Menci公司的一套专业无人机航测后处理软件全自动处理软件,可以处理任何的带有GPS的无人机影像,生成包括3D点云、DSM 、DTM、DOM等高精度成果。
简易及直观的用户界面,让用户可实时的交互使用APS所提供的各个功能。
两款软件都具有自动化、简单易用的特点,都能够自动生成3D点云、DSM、DOM等成果,是目前比较成熟的无人机航测数据处理软件。
2 数据处理概述选用某测区无人机航测数据,分别采用Pix4Dmapper与APS软件进行数据处理。
该测区面积为4平方千米,采用无人机航摄飞行一架次,飞行航线4条,航线为南北方向。
采用Canon EOS 5D Mark III相机拍摄像片101张,像片尺寸为5760×3840像素。
具体飞行情况见图1。
本测区共测量像片控制点21个,利用两款软件进行两空三加密时,只选用了其中的9个。
其余像控点作为检查点使用,已检查DOM成果平面精度及DSM成果的高程精度情况。
珞琪rtk无人机后差分数据处理案例
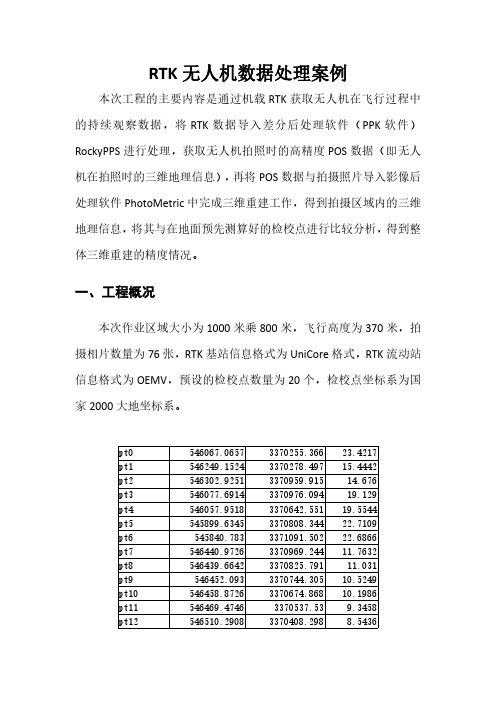
RTK无人机数据处理案例本次工程的主要内容是通过机载RTK获取无人机在飞行过程中的持续观察数据,将RTK数据导入差分后处理软件(PPK软件)RockyPPS进行处理,获取无人机拍照时的高精度POS数据(即无人机在拍照时的三维地理信息),再将POS数据与拍摄照片导入影像后处理软件PhotoMetric中完成三维重建工作,得到拍摄区域内的三维地理信息,将其与在地面预先测算好的检校点进行比较分析,得到整体三维重建的精度情况。
一、工程概况本次作业区域大小为1000米乘800米,飞行高度为370米,拍摄相片数量为76张,RTK基站信息格式为UniCore格式,RTK流动站信息格式为OEMV,预设的检校点数量为20个,检校点坐标系为国家2000大地坐标系。
pt0546067.06573370255.36623.4217pt1546249.152********.49715.4442pt2546302.92513370959.91514.676pt3546077.69143370976.09419.129pt4546057.95183370642.55119.5544pt5545899.63453370808.34422.7109pt6545840.7833371091.50222.6866pt7546440.97263370969.24411.7632pt8546439.66423370825.79111.031pt9546452.0933370744.30510.5249pt10546458.87263370674.86810.1986pt11546469.47463370537.539.3458pt12546510.29083370408.2988.5436pt13545709.34523370165.76514.5748 pt14545718.49793370287.99915.6138 pt15545714.96983370412.3817.5124 pt16545715.0063370485.36218.6102 pt17545715.08633370644.94620.9813 pt18545714.135********.21221.7256 pt19545709.45793371116.7520.14表1地面检校点一览图1检校点分布一览二、使用RockyPPS获取高精度POS将RTK基站数据、流动站数据和曝光时间数据一并导入RockyPPS 软件进行解算,可得到无人机拍照时的精准POS数据。
Pix4D mapper软件在无人机航空摄影与工程地质调查中的数据处理
日 使用戤U的璃日位置
崾目蜜型
0 新埔目 e 台抖已青瓒目来创建新顼目
2 数 据 处 理
2 . 1 项 目的建 立 与照片 、 数 据导 入
处理嵌式
0 航扫( 生戚点云, 赫宇衰面攥型和正射静像圄)
日嚣 } 5 } 警 纹 理 租 鼻 育 非 毒 糟 确 的 地 鼍 定 位 圈 母
1 竺 苎竺塑
址曩 l c
竺 竺 !! 竺 蔓 鱼笪 璺 曼 苎 曼
r 秭 描 碰 适 i j 匾 醯 西 豳 匦幽 函 蟊 酉 爵 § 匿 墓 l 目 疆 西 = [ 疆匦 琏 l 重 [ 疆 E ! ——
蠹 航拍 ( 生庙点云 , 鞋字采面 曩型私正射影 慑雹)
慑褂 舡拍或地面 播嚣 ( 只生藤点云)
打开 P i x 4 D m a p p e r 软件 , 在“ 项 目” 菜单 上 点 击
“ 新项 目” 按钮 , 建 立 项 目名 字 与 文 件 路 径 , 并 根 据 拍 摄方 式 选取 “ 航拍 ” 与“ 倾 斜航 拍 或 地 面 摄影 ” , 点
建 的原理快 速 获取 点 云数 据 , 通 过 给予 的控 制 点 生
成真实 坐标 并 且带 有 详 细 彩 色 纹 理 的三 维 模 型 , 在
后 期处 理 中能 对三 维 模 型 体 勾 画 地 质 界 线 , 计 算 面
积、 体 积等 功能 , 并将 勾 画边 界导 入到 C A D 当中 。
l *匾攫Ⅲ
处理 、 生成 点 云 、 生成 D S M 以及正 射影 像 。 ( 2 ) 在空 三射 线 编 辑 器 中刺 出控 制 点 。这 种方 法 先进 行 初 步 处 理 后 在 空 三 射 线 编 辑 器 显 示 控 制
PhotoMetric无人机数据处理软件

PhotoMetric软件是一款由上海珞琪软件公司开发的专门用于近景及无人机影像的摄影测量软件,它具有操作简单方便,使用快捷全自动化的特点,可以非常快速的得到海量的高精度数据,提供满足客户各种需求的产品。
导入数据使用PhotoMetric软件完成工程处理所需要的数据包括三部分,分别是影像、POS数据和相机参数,其中影像数据是必须数据,POS 数据和相机参数可以根据用户的需求选择导入。
处理流程使用PhotoMetric软件处理工程的流程如下所示,分别为空三定向、坐标转化、密集匹配、三角网构建和产品生成。
1、空三定向空三定向流程主要对相片进行各种分析、提取、计算,完成从影像到空间、从图像到数据的过程,得到初步的点云数据。
空三定向流程主要分为三个步骤:特征提取、特征匹配和空三。
1)纹理提取纹理提取是指对相片原始图像建立影像金字塔,对所述影像金字塔中的每一层影像计算响应值,并确定特征点方向以生成特征点描述。
2)影像匹配影像匹配是指根据针对所述特征提取步骤中的特征点进行抽稀形成强特征点,按照设置好的像对关系,对所述强特征点进行匹配,匹配生成的一致点,采用在平面三角网上内插视差的方法求初始左右视差及左右影像初始匹配坐标。
3)空三定向空三定向是指,通过将之前匹配的结果,通过一系列方法计算,将每个像对形成的模型与坐标系,统一在一个整体的模型与坐标系下,确定相机与特征点在该坐标系下的位置、姿态与坐标。
2、坐标转化1)控制点管理控制点管理,是在影像及点云中选择设置好在拍摄相片前预设的标靶或标识点,通过一系列的操作及计算,完成对点云数据的坐标转换及误差评定。
2)像控点量测(比例棒管理)影像控制点选取,用鼠标点选该控制点在相片显示区中各相片中位置坐标已知的标靶或标识点,点选完成后点击确定即可。
然后根据选中的影像控制点,根据两点间的距离,设定比例棒。
3)光束法平差光束法平差是利用光束法区网平差原理精确解算测区内所有影像外方位元素和模型点空间坐标,并将全部影像在统一模型与坐标系下进行整体平差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人机航测软件配置方案
一、无人机航测数据特点:
影像像幅小,影像数量多;受限于无人机姿态稳定性,影像旋偏角大;非量测性相机焦距短,影像投影差变形大,并且影像畸变差较大;POS精度低;以上均对后期处理软件具有很高的要求。
二、针对无人机航测数据特点在数据处理中需要解决的几个关键问题:
1).影像同名点匹配问题,尤其是弱纹理地区,如沙漠、林地、山地、水田等区域
2).空三成果精度保证问题
3).空三成果与采集软件的匹配问题
4).软件操作简单易用,自动化程度高
四、推荐软件介绍
结论依据:通过分析市面上的无人机后处理软件的特点,结合市场用户的试用情况及经验积累如南宁勘察测绘地理信息院,遵义水利水电勘测设计研究院(湄潭县高台水库1:1000地形图测量项目,中桥水库1:1000地形图测量项目),中国电建成都勘察设计研究院有限公司,中国电建西北勘测设计研究院有限公司,软件选型上采用多种软件组合的方式,数据预处理采用美国Trimble公司UASMaster软件,采用UASMaster软件做完同名点匹配后采用德国Inpho公司Inpho软件MATCH-AT功能进行空三加密,空三加密后的成果导入航天远景公司Mtrix系列或四维公司JX4系列测图系统进行测图,这是实现高效高精度成果的最佳方式也是经过大量生产验证过经验方案。
UASMaster软件介绍
该软件在非摄影测量人员接近黑匣子的简单工作流与摄影测量专家的工作流之间架起了桥梁,填补了他们之间的空缺。
UASMaster包含先进的技术,这种技术经过定制,能从UAS 的数据特性中给出高质量的结果。
它很容易集成到Inpho软件的摄影测量工作流和第三方工作流中。
UASMaster具有开放市场的理念,几乎能处理来自任何UAS硬件供应商的数据。
它可以处理固定翼无人机和直升无人机系统所获得的数据。
甚至对于处理飞艇和其它类型无人机系统所采集的数据,也证明该软件是成功的。
主要特点
集成到单一产品中的完整的摄影测量工作流程
快速黑盒子处理或者通过预设的质量优化与性能优化的多步骤处理
处理任何类型无人机系统数据
多种相机支持(支持高达5100万像素的相机)
无需专门的摄影测量知识或经验,即可获得完美的成果
性能概述
工作流
全自动的地理参考、相机标定、点云匹配和正摄影像镶嵌
通过子区域选择,对地理参考、点云和正摄镶嵌进行编辑与再处理
最佳精度的摄影测量级成果
处理任务跟踪监视
存储相机标定结果,供以后参考
可选择黑盒子一键式处理或者多步骤处理
支持加权的GNSS/IMU数据与地面控制点数据(GCP)(可采用高质量的GNSS数据,如UX5 HP)
- 仅用少量地面控制点,进行地理参考与传感器标定
- 对于应急反应工程,支持无任何地面控制点的数据处理
多个飞行架次与多个相机数据处理能力
UASMaster处理的成果数据无缝集成到eCognition软件中,自动进行地物特征提取与变化检测
地理参考
自动删除错误,确保最佳数据质量
基于预定义投影实现基准转换,完整的图形分析工具和详细报告
自动相对平差与绝对平差
高效的连接点匹配,即使在弱纹理地区或山区
以正确的拓扑关系和自动影像选择方式显示整个工程影像,用于交互式相控点测量
强大直观的图块分析
- 简单易操作的大数据集的可视化检查
- 可视化
- 影像脚点
- 重叠度
- 地面相控点与连接点
- 点与影像连接
- 残差
- 误差椭圆
- 点与影像的几何区域分析
- 点密度/连接性的面元分析
- 有效的显示过滤器,如多航带连接等
- 统计数据表与图形直接关联
点云和高程数据
彩色点云和地表模型格网数据,以及裸露地区的DTM输出
有效过滤点云噪声点
精细的点云过滤和分类,例如地面点与非地面点分类
立体视图与单目视图模式下编辑与可视化
以平视显示方式的上下文驱动编辑工具
形态数据刚性因素分析与测量,如断裂线
类似CAD的多层编辑、可视化与基本测图
基于自动关联和基于地形插值的3D数字化
用于海量点云数据的高性能3D显示视图
等高线与高程的实时动态编码
自动最佳匹配立体模型视图模式,用于立体显示和编辑
点云批处理(创建瓦片数据、等高线与格网)
正射影像处理
基于特征的自动拼接缝查找和匀光匀色,建立在天宝公司独家拥有的OrthoVista技术之上,
可产生完美的正射影像镶嵌
根据影像纹理分析,采用正射影像镶嵌自适应混合技术创建镶嵌影像
精确的真正射影像(基于表面模型创建)和传统正射影像(基于裸露地表DTM创建)策略,其成
果可在GIS中使用
无人机专用的局部区域正射影像编辑工具
支持基于已有高程模型,进行快速处理
可选择基于彩色点云快速创建正射影像,无需校正
用户列表(部分)
采购单位所在城市配置数量山西省电力设计院太原UASMaster1套
核工业地质十一队地质邢台UASMaster
UX5 HP
2套
河北沧州第四水文地质大队沧州UASMaster1套
受部分用户保密需求未能提供所有用户,敬请理解!。