水面舰艇指控系统原理
舰载指控系统模拟训练系统设计
Xu Ho n g q i n g
( U n i t 9 1 4 0 4 , Q i n h u a n g d a o 0 6 6 0 0 1 , C h i n a )
Abs t r a c t :Co mb i n e d wi t h t h e t r a i n i n g d e ma n d s o f山e s u r f a c e s h i p c o mma n d e r s ,a s i mul a t i o n t r a i n—
Ke y wo r d s :s h i p - b o ne r c o m ma n d a n d c o n t r o l s y s t e m;s i mu l a t i o n;t r a i n i n g s y s t e m
挥员 提供 战 区局 部 态势 和 综 合态 势 图 , 指 挥 员要
软件进行 作 战方 案 分 析计 算 和 优选 , 进 行 目标 分 配、 目标指示 和 组 织武 器 射 击通 道 。指 挥 员 要 能
2 0 1 3年第 4期
0 1 2 3, N
总第 1 5 1 期
S e r i e s N o. 1 5 1
EI 正Cr R ONI C WA RF AR E
舰 载指 控 系统模 拟训 练 系统 设 计
徐 红 青
水面舰艇战术训练仿真模型设计与实现
水面舰艇战术训练仿真模型设计与实现作者:邹文萌, 刘喜作来源:《现代电子技术》2011年第20期摘要:运用模拟器在舰艇部队和院校进行战术模拟训练已经非常普遍,要求也越来越高。
为了使模拟器能够很好满足目前舰艇部队战术训练的需要,本文利用可重用标准组件设计方法,建立基于分布式的虚拟环境系统框架,对水面舰艇战术训练中的作战单元组件,虚拟环境组件,战术想定组件和网络服务管理组件等关键模型进行仿真建模,为舰艇战术训练模拟器提供可重用可扩展的环境和模型支持,并在舰艇模拟训练系统综合演练中得到应用,能够满足目前新型舰艇作战指挥和相关技能训练的需要,也为研制新型舰艇训练模拟器提供依据和模型参考。
关键词:战术训练;虚拟环境;仿真建模;舰艇模拟训练系统中图分类号:TN919-34 文献标识码:A文章编号:1004-373X(2011)20-0125-03Design of Virtual Combat Simulation Model for Naval Tactical TrainingZOU Wen-meng, LIU Xi-zuo(Simulation Training Center, Dalian Naval Academy, Dalian 116018,China)Abstract: It is very popular that the naval ship troops and academies use the simulators for tactical training. In order to meet the requirement of tactical training and military simulation in naval ship troop, the modular architecture methods are adopted for the establishment of virtual combat simulation system. The developed architecture is based on object oriented and modular design principles, while it explores the flexibility and strength of the simulation system. Some key components such as combat unit component, virtual environment unit component, tactical scenarios unit component and web sever unit component are simulated and modeled in the naval tactical training for the support of the simulation model and virtual environment. They were used in the simulator systems for integrate training, and show more effectiveness.Keywords: tactical training; virtual environment; modeling and simulation0 引言当前,运用模拟器在舰艇部队和院校进行战术模拟训练已经非常普遍,但随着新型舰艇的服役、新装备的出现更新和未来海战场的复杂多变,采用先进计算机技术的模拟器涉及的范围越来越广泛,要求也越来越高。
船舶动力定位系统的原理

船舶动力定位系统的原理
船舶动力定位系统的原理主要基于以下几个方面:
1. 全球定位系统(GPS):船舶动力定位系统通常使用GPS卫星技术来获取船舶的实时位置信息。
通过接收来自多颗卫星的信号,系统可以计算出船舶的经度、纬度和海拔高度等信息。
2. 惯性测量单元(IMU):船舶动力定位系统还常常配备惯性测量单元,它是一种集成了加速度计和陀螺仪的装置。
通过测量船舶的加速度和角速度等信息,系统可以根据牛顿力学的运动方程计算出船舶的位置和姿态状态。
3. 地面基站和微波测距系统:在一些需要更高精度定位的应用中,船舶动力定位系统可能还会使用地面基站和微波测距系统。
地面基站会发送信号给船舶,而船舶上的接收器会测量接收到信号的时间延迟,从而计算出船舶与基站之间的距离。
通过多个基站的协同作用,系统可以实现更精确的定位。
4. 数据处理和集成:船舶动力定位系统通常会将从各个传感器获取的数据进行处理和集成。
这包括计算出船舶的位置、速度、姿态等信息,并进行滤波和校正,以提高定位的精度和稳定性。
综上所述,船舶动力定位系统的原理是通过GPS技术、惯性测量单元、微波测距系统等多种传感器的协同作用,获取船舶的位置、姿态等信息,并进行数据处
理和集成,从而实现对船舶动力的准确定位。
水面舰艇编队编成多目标模糊优选模型及应用
水面舰艇编队编成多目标模糊优选模型及应用<情}}{指挥控制系统与仿真技术~}2oo2年第6湖水面舰艇编队编成多目标模糊优选模型及应用王玉柱梁义芝摘要小丈乞暇以往优选决策只是定ll生比较的缺点,探讨了对编队总体作战能力和武器系坑性能相互影响关系进行定量评估的方法,通过编队作战能力层次分析模型的建立,建立了编队编成多目标模缃优选模型关键词编队籀,戊作战能力指标体系相对优鸽度多目标模糊优选模型1引言水面舰艇编队是在具体的战场环境巾,把各有所长,能完成不同使命任务的舰艇有机组合而成具有多种作战功能(能力)的兵力编组,是实施区域作战,夺取作战海区制空权制海权的重要兵力.在信息战条件下,单艘舰艇难以形成综合优势,而舰艇编队可以使各具所长的舰艇构成一个具有多功能,多层次,全方位,大范围的攻防体系,发挥其作战效能,形成较强的编队综合作战能力.另一方面,高技术在武器装备和战争中的广泛应用,给传统的海上作战模式和海上舰艇编队带来根本变化.现代海战是在水,水下,海空和太空的广阔区域中同作战,为适应不同类型的海战需求,要求舰艇编队具有快速机动能力,快速反应能力,协同作战能力,具有对空,对海,对潜作战功能和电子战功能,以保证舰艇编队在现代海战中力争主动,掌握制空权,制海权,制信息权.为此要对舰艇编队在多目标情况下进行科学编成,选择最佳的编成方案是编队作战胜利的关键.本文克服以往对编队选优只是定性比较的缺点,探讨了对编队总体作战能力和武器系统性能相互影响关系进行定量评估计算的方法,通过相对隶属度,隶属函数的建立,建立了编队编成多目标模糊优选模型.的自动过程.MJ2000就处在其开始研制的阶段.在MJ2000在研制阶段,在这期间反水雷指控系统被设备中同样的反水雷指控系统将被用来遥控两安装在荷兰的"Alkmaar"级反水雷艇上的一个条带有可变深度声呐的无人艇.由于研制和训容器中,控制德国的无人艇,荷兰皇家海军从而练使用的都是同一反水雷指控系统,使得开销得到了使用该系统的宝贵的经验.在这里,经实质性地被减少.验非常肯定,尤其是简单的系统操作在国际的此外,荷兰皇家海军计划将在"Alkmaar"级试验中留下了非常好的印象.现在该系统完全艇上和将来新建造的无人艇上使用反水雷指控能满足两国海军的全部要求和期望,并且同时,系统,新建造的无人艇类似德国的"Seehund"朝着安全控制无人海船迈出了决定性的一步.无人艇.其它的国家,比如英国,也对无人驾驶8反水雷指控系统的应用前景从2001年年底开始,所有的五艘HL352级艇("三件套")上将装备新的反水雷指控系统,因此在将来,德国海军可用一种扫雷系统,该系统使扫雷作业高效且低危险,这就是最佳作业的反水雷指控系统.德国海军在将来的猎雷作业中也将使用无人艇,例如,猎雷设备l4?遥控无人艇产生了极大的兴趣.考虑现在开发的项目,比如MO20l5NA—TO研究或观察NA TO海军第三大队,清楚地表明,无人驾驶艇系统在将来的用途会越来越重要.关于这一点,德国的HL352级艇载反水雷指控系统提供了出色的已证实的技术.【=j水面舰艇编队编成多日怀馍糊优选模型及心J}j 2编队作战能力层次分析模型【指标体系)2.1编队功能分解其功能可分解为防空,反潜,反舰,对岸和电子战五个子功能.图1编队系统功能分解图2.2作战能力层次分析模型编队作战系统包含了编队武器系统,通信系统,指控系统,探测系统,电子战系统等,涉及的主要性能指标有几百个.作为一个相互作用的要素的总体,它有着一定的层次结构.本文抛开总体作战的不确定性,分别将每一子功能作为子模型,分别建立子模型,这样就可以抛开具体编队形式,建立一个通用的分析子模型.这样建立的子模型在个数上可以任意组合来评价总体作战能力,每个子模型又具有独立性,随意改变.这种先分后合的子模型综合思路具有很强的通用性.下面以对空作战能力为例建立评价指标体系:设A代表对空作战能力,则A应包括五个方面的指标内容:攻击力,探测能力,协同能力, 队形配置水平,C3I水平,分别以B1,B2,B3,B4,B5表示.如图2所示.图2每一个方面可以细划分如图3所示.命中I毁f)J//一攻击强度攻批;欠1l攻y,-速度I备弹监Jl伞向攻攻击力攻艟域.{霎l只敬快速性脚悯L射程r远程探测I探测能力<Il中程探测(洲分辨率厂探测距离I精度反应时间l数据率L分辨率图3对空作战能力指标体系图对空,反潜,对岸和电子战能力评价指标体系可类似于对空指标体系进行建立.3多目标模糊优选模型3.1相对隶属度与相对隶属函数概念在许多应用领域,常常只需要确定相对隶属度,相对隶属函数.计算相对隶属度,相对隶属函数远比确定绝对隶属度,绝对隶属函数容易.更为重要的是可以在基本理论与概念上消l5?(情报指挥控制系统与仿真投术~,,2oo2年第6期除在应用领域长期仔在的所谓确定隶属度,隶属函数中的"主观f意性"的困惑.设沦域上的一个模糊慨念1,分别贼给l处于维差异}介过渡段的两个{=l2点以0干仃1的数0到1的数轴上构成一个【0,1J『才J区间数的连续统=对于任意"∈U,都在该连续统上指定了…个数,(u),称为f对_1的绝对隶属度..设在恢连续统的数轴建立参考系,使其中的任两个点定为参考系坐标上的两极,赋给参系的两极以.和1的数,并陶成参考系【o,11数轴上的参考连续统.对任意"∈U,在参考连续统上指定了一个数,(u),称为u对/I的相对隶属度.映射1:U一【0,1]1}u卜+I(II,)∈【0,1]J称为相对隶属函数.3.2目标相对优属度概念与公式定义:设在优选与决策过程中,取决策集D中的目标最大特征值max与最小特征值min作为上,下确界的相对值,由此构成参考连续统的两极.根据3.1的定义计算目标对优的相对隶属度,简称目标相对优属度.根据查德隶属度公式,采用与查德隶属度公式相似的公式结构,对越大越优目标其相对优属度公式为rij=—丑(11)————————■一Lmax一rain对越小越优目标其相对优属度公式为:坠二(21maxx—minx~式中r为决策(方案)目标i的相对优属度; 3.3多目标模糊优选模型设编队有n个编成方案(或决策)满足约束集形成决策集D={(f,d,…,d);编队有仇个子功能(目标)组成对决策集的评价目标集P={p1,P2,…,P).m个目标对凡个方案的评价可用目标特征值矩阵表示l6?x:x11X12…,1|1.r2.F22….1'2m1,n….r,,用口标对F优的相对隶属瞍公式(1),(2),将目标特征值阵变换为目标卡f】对优属度阵R=rl1rl!…rl,r2lF22…rrfr,nlr,n2…rⅢ,£根据3.1的定义,由参考连续统中介过度的两极具有最大相对优属度g=l或g=(gl,g2,…,g)'=(1,1,…,1)(5)最小相对优属度b=0或厶=(6l,b2,…,6)=(0,0,…,0)'(6)也可采用g=(gl,g2,…,g):(rIlVr12V…Vrl,r2lVr22V…Vr!,lVrV…Vrm,)(7)b=(b1,b:,…,6)=(rl1八rl2八…^rl,r2lVr:V…Vr1,rm1VrmV…Vrm,)(8)V,八分别为取大取小符号.设决策寸优的相对隶属度以z表示,编队中Ⅲ个目标的权向量=(1,2,…,)'(9)决策可用向量表示为_=(rU,r2j,…,)'(10)它与优等决策的差异可用广义权距离表示为dig=它与劣等决策的差异用广义权距离表示为(,,6=(12)其中,P为距离参数,P:l海明距离,P=2欧式距离.在模糊集合论中隶属度也可定义为权重.水面舰艇编队编成多目际慢糊优选馍及jf】决策以相对隶属度",隶属于模糊概念——优,它的距优距离Ndj,为了完善的表达决菊与优等决策的距离,距优距离,以11作为权重.则有加权距优距离,厂————一——=zIjdj=√∑(l『J(13)类似的,加权距劣距离^=uydi,.=(1一u)di^(14)为了求解决策相对隶属度",的最优值,建立如下的优化准则:决策的加权距优距离平方与加权距劣距离平方之总和为最小,即目标函数为rain{(u)=(+)=【∑(一~))】i=1+(1一):[∑((一6])(15)求目标函数的导数并令其为零,解得决策相对优属度模型为: ————■———————一f∑(一~)】1+{————一【∑(~一b1)】,J1,2,…,nl}(16)对模型的分析:式(16)可以变为前7'l+I上臣I从而可知,(1)决策的距优距离小于距劣距离, 即,<di6,决射隶属于优的相对隶属度u,>0.5,隶属于劣的相对隶属度z£<0.5 (2)决幕的距优距离等于距劣距离,即d=(f,6,贝4=z<0.5.(3)决策的距优距离等于零,决策就是优等决策,uj=1,=0.(4)决策的距劣距离等于零,决策就是劣等决策,l,tj=0,uy=l根据以上分析,该多目标模糊优选模型具有清晰的数学,物理意义.对于多层次多日标系统模糊优选问题,设总系统共分解为H层,告第一层(最低层)仃m 个并列的单元系统,对每一个单元系统rfj模糊『尤选模型(式l6)进行决策相对优属度的计算, 到11,为层次l单元系统的输出,i=l,2,…,m,=l,2,…,眦它们组成层次2单元系统的输入,令=,设个单元系统的权重仍以表示,则可用模糊优选模型进行层次2中单元系统的计算,如此从低层向高层进行模糊优选的计算,直至最高层.4举例设在执行某一任务时,我舰艇编队有三种编成方案,编队系统子目标权重与相对隶属度列表如下(表中数字只是为了举例计算,并不代表真实的作战权重分配),现用上述模糊优选模型确定最佳编成方案.对海,反潜,对岸和电子战能力可同样类似对空作战能力列出其权重,优属度表,这里省略.对空,对海,对岸,反潜和电子战五个子功能的权重为09=(0.30,0.20,0.05,0.30)(18)计算从最低层(第一层)开始,由表l知攻山最底层目标相对优属度矩阵为尺430.572ll0.9950.8800.8680.8500.7500.3860.5540.5240.926=(r(19)其中i=l,2,3,4;:l,2,3.目标权重为=d=(0.303,0.237,0.247,0.2l3),取P=2的欧氏距离,根据模型得3个编成方案对攻击强度这个目标来说对于优的相对隶属度向量(即方案的目标优属度向量)//l=(0.920,0.968,0.591)(20)同样可计算出相对攻击空域的3个方案的相对优属度向量l7?《情报指挥控制系统与真技术}21)02年第6Iu】表1目标,权重,目标相对优属度表目标相优属度目标权重日标仅重目标:,重目标权晕方案1方案2方案3 命率().3O.().572().881)().386毁伤率0.237l0.868().554攻击强度0.45攻击批次0.247l0.850().524攻击速度0.2l30.9950.7500.926攻击力().25qIf界0.6().868l0.621)攻击空域0.35舰只数0.4().58l().6600.85反应时间0.30.8680.572().549编快速性0.20弹速0.2().540.8500.654队综对射程0.50.7200.6000.52()△六日I探测距离0.3740.6290.5480.274作作战战0.3精度0.280l0.8390.3l2探测能力0.25能能反应时间0.183l0.846l力力数据率0.163l0.766l攻攻协同0.3070.667().667l同能力0.15攻探协同0.323()00探探协同0.3700.8000.6000.400信息处理0.32000.4380.15l数据传输0.2370.0240.3900C3I水平0.25辅助决策0.3200.I150.446O.056综合通信0.123l0.9490.840队形配置0.100.9000.7500.8001l2=(0.904,0.958,0.824)(21)相对快速性的3个方案的相对优属度向量//,3=(o.876,o.721,o.581)(22)由(19),(20),(21)构成攻击力目标优属度向量矩阵R=0.9200.9040.8760.9680.9580.72l0.59l0.8240.58l(23)本层权重向量=(0.45,0.35,0.20),利用模型计算出3个方案相对攻击力的优属度向量=(0.991,0.988,0.789)(24)然后计算对探溟0能力的各方案目标优属度向量1l=(0.910,0.806,0.414)(25)然后计算对协同能力的各方案目标优属度向量M=(0.519,0.400,0.431)(26)然后计算对C3I水平的各方案目标优属度向量=(0.067,0.422.0.055)(27)l8-由此构成最后对空作战能力的目标特征值矩阵R0.99l0.9l00.5l90.0670.9000.9880.8060.4000.4220.7500.7890.4l40.43l0.0550.800(28)本层权重向量=(0.25,0.25,0.15,0.25,0.10),最后利用模型计算各方案相对对空作战能力的优属度向量为M=(0.679,0.792.0.407)(29)方案二优属度最大,可知从对空作战方面而言,方案二最优.同理,利用模型计算出对海,反潜,对岸和电子战的各方案优属度向量,组成综合作战能力目标特征值矩阵,最后可计算出从综合作战能力考虑,哪一种编队编成方案最优,从而进行优选决策.从上面分析计算可知,利用本文建立的优"三位一体"近防武器系统反应时间研究李峰田字光摘要本文以"密集阵"近防武器系统为例,通过对该系统的工作过程的分析,分别计算出各个过程的反应时间,最后推导出计算"三位一体"近防武器系统的作战反应时间的公式,并应用此公式计算近防武器系统的作战反应时间关键词"密集阵"近防武器系统作战反应时间三位一体在现代高技术海战lf】,反舰导弹的显酱特点是精度高,速度快,射程远,威力大,隐蔽性好,雷达反射面积小,并且具有较强的规避机动能力,已成为水面舰艇的主要威胁.作为舰艇的最后一道防线,小口径舰炮武器系统的反导从发现目标到交火实际能提供的最大时间不超过十秒.因此,对末端防御的小口径速射舰炮武器系统反应的时间研究有着重要意义.在末端防御的小口径速射舰炮武器系统中,"三位一体" 近防武器系统是其典型的代表,本文通过对"密集阵"近防武器系统的分析,得出了"三位一体" 近防武器系统的反应时问公式,并通过实冽计算出了近防武器系统的反应时问.1"密集阵"近防武器系统"密集阵"近防武器系统是一种"三位一体"结构方式的全自动,具有快速反应能力的舰载近程反导武器系统,即瞄准,控制,舰炮同在一个基座上驱动.该系统采用积木式标准模块结构,由雷达制导计算机控制,它能以自备方式进行目标搜索,检测,跟踪,判断并决定攻击的目标.在没有任何其他系统支援的情况下,自动地与入侵敌舰的低空反舰导弹进行交战整个过程全是自动进行的,并可随时进行人工干预因此,该系统具有快速反应能力,这为拦截入侵的反舰导弹提供了技术保障. "密集阵"近防武器系统由雷达,转管炮,随动系统,炮架,炮座,电子密封舱,本机控制台和遥控控制台组成.其中,雷达由一部搜索雷达,一部跟踪雷达,天线伺服系统和稳定平台组成.其天线伺服系统包括搜索雷达雷达天线及稳定平台,跟踪雷达天线及其二轴稳定系统,高频部件及其接收机,天线伺服系统等部件,整个模块被安装在摇架上.由于天线伺服系统与舰炮完全复合起来,当进行目标指示后,舰炮带动雷达完成对目标的调舷和搜索, "两位…体"火控计算机只需给舰炮伺服系统传送输送指令,也就是说,雷达与舰炮之问不存在着协调问题.这使得调舷和搜索的复合控制简单且易实现.2作战反应时间"密集阵"近防武器系统的反应时间是指从跟踪雷达接收到目标指示开始,到火炮指向目标的未来点,并完成射击准备为止所经过的时间.在这段时问内,系统需要完成接收目标选模型和分目标层次分析模型,既可以进行最社,1984后的优选决策,又可以进行分目标的方案优选2陈守煜.系统模糊决策理论与应用.大连:大决策,先分后合并且具有独立性,这是本文所建连理工大学出版社,1994-12模型的一个优越性,保证了模型的实用性和应3吴永杰,周玉兰-海上舰艇编队系统-北京:用的…….4警三拣参考文献工业出版社.1999.l9?。
美国海军水下作战发展探讨

美国海军水下作战发展探讨摘要:在界定水下作战内涵与范围的基础上,全面归纳了美军水下作战的发展历程,从美军水下作战的发展体系、网络、武器、装备、技术等方面较为系统地分析其发展现状、规律和特点并预测其未来发展趋势。
关键词:美军;水下作战;发展;现状;趋势1 引言水下作战是指利用潜艇和其他水下系统在水下及从水下发起的进攻性或防御性军事行动,包括监视、部署特种部队,以及摧毁或压制敌方部队和水下基础设施。
具体包括潜艇战、反潜战、水雷战和反水雷战、水下无人平台作战、水下信息监视和情报侦察、水声对抗、水下信息传输和指挥控制等。
2 美军水下作战发展概况冷战结束后,世界濒海国家迅速装备常规潜艇,对近海作战行动构成了较大威胁。
为此,自20世纪90年代以来,在“21世纪海上力量”和“由海向陆”等国防部顶层方针的指引下,美海军的战略重点逐渐由深海向浅海转移。
由于浅海中的声场环境异常复杂,电磁波无法实现远距离信息传输,而水声信道的不稳定性又对新世纪水下作战的信息优势提出了挑战,因此濒海水域作战大大增加了探潜、反潜和猎雷的难度,要求美海军必须增加水下探测距离和分辨率、提高水下作战场信息控制能力,扩大水声预警探测范围。
这些作战需求驱动着水下作战的发展。
1997年,美海军提出了“网络中心战”的概念,随后提出网络中心反潜战,并开始深入研究作战理论,研制相关设备,加速进行以平台为中心的反潜战向以网络为中心的反潜战过渡,美军水下作战的主要模式逐渐向水下网络中心战转变。
纵观美军水下作战发展历程,其主要特点一是反潜机制趋于联合。
为实现反潜作战指挥、装备技术以及情报共享机制方面的无缝链接,美军联合日本设立了“美日反潜战中心”,成立了“海上联合反潜作战指挥协调组”,基本形成了“美军主导、日台配合、广泛监控、重点封堵”的反潜格局。
二是运用多种兵力手段进行综合反潜。
针对潜艇行动的不同阶段,采取不同的侦察探测手段、兵力使用强度和反潜搜索样式,基本实现了对潜艇出航、航渡、大洋活动全过程、全航态、全方向的立体探测。
水面舰艇指控系统原理

水面舰艇指控系统原理水面舰艇指控系统是一种用于控制舰艇航行和作战的重要系统。
它通过集成各种传感器和控制设备,实现对舰艇的全面监测和指挥。
本文将对水面舰艇指控系统的原理进行介绍。
水面舰艇指控系统的核心是集成控制系统,它由雷达、声纳、光电传感器等多种传感器组成,可以实时监测舰艇周围的环境和目标。
这些传感器可以探测到敌方舰艇、飞机、导弹等潜在威胁,为舰艇提供全面的情报支持。
除了传感器,水面舰艇指控系统还包括武器控制系统和信息处理系统。
武器控制系统可以根据传感器提供的情报,对敌方目标进行跟踪和攻击。
信息处理系统则负责整合和分析传感器数据,为指挥员提供决策支持。
水面舰艇指控系统的工作原理可以简单概括为:传感器探测目标→信息处理系统分析数据→指挥员下达指令→武器控制系统执行打击。
当敌方目标进入舰艇的作战范围时,传感器会自动探测目标并传输数据给信息处理系统。
信息处理系统会对数据进行分析,并生成目标跟踪信息和威胁评估报告。
指挥员根据这些报告作出决策,下达打击指令。
武器控制系统根据指令对目标进行跟踪和攻击,确保舰艇的安全。
水面舰艇指控系统的原理是基于先进的信息技术和控制技术,它可以提高舰艇的作战效能和生存能力。
通过集成各种传感器和控制设备,水面舰艇可以实现对空中、水面和水下目标的全面监测和打击,有效应对各种复杂作战环境。
总的来说,水面舰艇指控系统是一种集成化的控制系统,它可以提供全面的情报支持和指挥控制能力,提高舰艇的作战效能和生存能力。
水面舰艇指控系统的原理是基于信息处理和武器控制技术,通过传感器、信息处理系统和武器控制系统的协同作用,实现对敌方目标的监测和打击。
随着科技的不断发展,水面舰艇指控系统将会更加智能化和自动化,为海军的作战行动提供更强大的支持。
系统工程在我国指控、火控系统中的应用
系统工程在我国指控、火控系统中的应用作者:孟建刚来源:《电子技术与软件工程》2017年第01期本文阐述了二十一世纪我国海军舰载系统工程在指控、火控系统的发展近况,以及采用的相关技术,重点对舰载指控、火控系统的发展方向进行总结,提出了加速发展我国海军舰载指控、火控技术需要解决的关键性问题。
【关键词】海军舰载指控火控系统系统工程1 概念综述1.1 系统工程系统工程是一门囊括多专业领域的综合科学,其用系统的观点与综合的分析方法指导应用科学技术,用最短的时间,最少的人力与物力,取得最好的效果,进而得到最佳的经济效益。
指控、火控系统是在舰艇基础系统上发展而来,近年来我国在发展这一系统的同时,也极为关注一些高性能的系统研究,其中系统工程对所有系统都具有普遍适用性,在如今也成为了非常有效且实用的重要手段和途径之一。
1.2 指控、火控系统火控系统是控制武器对预期目标进行准确射击的系统,自火控系统出现以来,在古今中外的战争中,都表现出了巨大的实际作用。
军事专家常说,能否准确的击中目标,关键所在就是火控系统的运用与否,可见火控系统在现代作战系高新技术快速发展的时代,对于舰载指控与火控系统中的重要地位。
而指控系统多应用于对舰艇数据、信息等战术情况的收集、整理,进而辅助指挥作战系统的工作,控制武器发射系统的工作进程。
在当前统的一体化发展中,舰载相关系统的开发与研制,已经成为目前军事发展的重点所在。
2 我国海军指控、火控系统的发展方向2.1 大型水面舰艇大型的水面舰艇承担着防空、反潜、反舰和对岸攻击等多种作战要求,长期担任和指挥执行作战任务,现代高科技配套背景下的海上作战局势日益严峻,呈现出显著的层次化、立体化的作战态势。
我国的大型水面舰艇的综合防控系统,通过网络等防控作战传感器、武器、电子战等设备进行综合,实施和协调指挥与控制,将软硬武器进行统一综合协调,这对于军事作战至关重要。
同样,这一系统还可以通过网络将声呐、鱼雷、反潜导弹等综合一体,实现统一的反潜作战,减少干预环节,缩短反应时间,进而提高反潜的效果。
潜艇在水下如何探测目标?

潜艇在水下如何探测目标?核潜艇在水下航行,是如何发现和识别目标的?几百米水下,伸手不见五指,战时,潜藏于海的潜艇如何识别出几十公里外的目标,它到底是敌舰还是我舰?仔细一想,这似乎挺难的。
核潜艇在水下潜行,它用来发现和识别目标的“眼睛”,就是声呐。
对核潜艇来说,声呐是它的最重要侦察监视设备,主要用于对水中目标搜索、警戒、识别、跟踪、监视和运动要素的测定,还可以进行水下通信和导航,保障潜艇的战术机动和水中武器的使用。
从结构组成来看,核潜艇上装备的声呐一般由基阵、电子机柜和辅助设备三部分组成,上述基阵中包含的水声换能器是声呐中的关键器件,它有两个用途:一是在水下发射声波;二是在水下接收声波。
核潜艇上装备的声呐,主要有两种,即主动声呐和被动声呐,平时状态下主要以被动声呐为主。
主动声呐是指声呐主动发射声波“照射”目标,而后接收水中目标反射的回波以测定目标的参数,主动声呐大多数采用脉冲体制,也有采用连续波体制的。
核潜艇在水下使用主动声呐来识别和探测目标的工作原理大致如下:首先,主动地发射声波,形成单个或多个具有一定扇面的指向性波束,或以全向的声脉冲信号向水中辐射;其次,接收由目标反射的回波,回传到声呐接收基阵,被转换成电信号,经一系列相关处理,在背景噪声中提取有用信号;最后,再经信号的后置处理,加工成适于各种终端显示或计算机处理的目标信息,输入终端设备进行显示或记录即可。
难就难在,你不能主动发信号。
比如,你用声呐向对方喊话:我是土豆,请问你是不是黄瓜?假如对方不是黄瓜,3枚鱼雷就会向你射来……潜艇最大优势是隐蔽,它们最擅长,也最喜欢干的事就是打黑枪。
若失去隐蔽,也就同时失去了自身最大的优势。
因此,主动发信号还有另一个弊端:即,你的核潜艇本来非常先进,静音性能超棒,你发现了20多公里远处,有一艘潜艇在活动。
但那艘未知潜艇本来还没有发现你,而你却主动打开声呐发信号,于是,你变透明了。
你说亏不亏?既然不能主动发信号,那怎么办?难道就这么僵持着?潜艇声纹识别未见其人,先闻其声。
水面舰艇对海作战可靠性的新型评价方法

2 水 面舰 艇 对 海作 战 网络模 型 构建
2 1 水 面舰艇 对海作 战 网络 的特 征 .
从 统计 物 理学 的 角度来 看 , 网络 是一 个 包 含 了
大 量个 体 以及个 体 之 间相互 作 用 的 系统 , 把某 种 是
现象 或 某种关 系抽象为 个体 ( 顶点 ) 以及个 体之 间 的 相互 作用 ( ) 边 而形 成 的用来描述 这一 现象 或关 系 的
引 言
海战场 环境恶 劣 , 舰艇不 仅受 自然 环境影 响 , 还 将 受 到 敌方 电 子器 材 的干 扰 和 武器 的 攻击 , 因此 为
庞大 的 网络 。 随着 复杂 网络理论 的飞 速发 展 , 已涌 也
现大 量用 复杂 网络 理论 来评 价 网络 的可靠 度Is, s]但 -
“ 反社 区” 的节点 之 间无 连接 或 连接 松散 , 于不 同 属
任 务 这 段 时 间 内 , 个 子 系统 内的节 点 可 靠 度是 不 各 随时 间变化 的 , 点之 间 的通 信链 路完 全可 靠 。 节 ( ) 为传 感 器节 点 , 种传 感器 的发 现概 率不 5作 每
一
样 ; 为对海 武器 节点 , 作 每种 武 器 的命 中概率 也不
样。
一
( ) 艇通 信 电缆始 终是 出于 完好 的状 态 , 6舰 即可 靠 度 为 1 设备 节 点具 有一定 的可靠度 值 。 ;
根据 以上 假设 , 以分 析 得 出水 面 舰艇 对 海 攻 可
击 网络是一 个 有 向“ 反社 区” 权 网络 , 图 3所示 。 赋 如
结合传统可靠性分析 方法 , 出了一种新的可靠性评价指标 , 提 进一步扩展 了传统可靠性指标 的 4 个特 性 。 并通过实例仿真 , 证 明 了该指标的有效性 。该方法将传统可靠性 理论 与复杂 网络理论有效地结合起来 , 将进一步扩大复杂网络的适用范围。
AIS系统的工作原理

AIS系统工作的介绍一. 自动识别系统(AIS)AIS系统最初是使用VHF的应答器工作在VHF70频道上的数字选择呼叫(DSC)来帮助船舶交通管理服务(VTS)的系统。
后来,IMO组织使用了新的技术(基于VHF的数据链的SOTDMA技术)改进了AIS系统,它是一个海上航海和无线电通信的系统,这个系统通过船与船和船与岸台之间传送航行信息,AIS能获得其它船的信息:船名,MMSI,呼号,位置信息,航行信息等,AIS增强了海上生命安全,航海效率,航海安全和保护海洋环境的能力。
AIS提高了船舶驾驶员信息的质量。
将AIS信息送到雷达中,能有助于避免船舶之间的碰撞。
AIS设备都要符合下列规则要求:IMO MSC.74(69)Annex3,A.694;ITU-R M.1371-1;DSC ITU-R M.825;IEC 61993-2(型式试验标准);IEC 60945(EMC和环境状态)。
该系统有三种方式工作方式:a.自主方式(连续工作在所有区域);b.指派的方式(数据发射间隔由交通管理监视站遥控)c.询问方式(从一条船或机构询问后再作出响应)AIS同步于GPS的时间,是为了避免在多个用户之间时间上不一致的冲突。
VHF的87B 频道和88B频道是通用频道。
船载的AIS发射应答器由IMO和ITU指定在87B频道和88B频道中的任何一个频率自动发送交换各种数据。
AIS系统概念图船舶动态数据向外发送的间隔是从3分钟~2秒内变化的,具体间隔是根据船速和航向而改变的,除此之外,动态数据也由岸台VTS或其它船的请求而响应发射。
静态数据和航海有关数据是每隔6分钟或请求发送。
船舶信息内容见下一页表:注:航向变化指的是航向数据变化大于10度/分对于改变发送报告时间速率如下:当船速增加时,大约1分钟;当船速降低时,大约3~4分钟。
二. 系统的工作1.AIS的工作AIS的应答器使用9.6Kbps 高斯最小位移键控(GMSK)频率调制,使用了HDLC (高电平数据链控制)数据包协议。
船舶导航系统工作原理
船舶导航系统工作原理船舶导航系统是船舶上至关重要的设备之一,它通过一系列先进的技术和设备,来确保船舶在航行过程中的安全和准确导航。
船舶导航系统主要包括GPS卫星导航系统、雷达系统、电子海图以及自动舵等多种设备。
一、GPS卫星导航系统GPS卫星导航系统是一种基于卫星信号的全球定位系统,它由一系列卫星和接收设备构成。
GPS系统可以通过接收卫星发射的信号来确定船舶的位置、航向和速度等关键信息。
GPS导航系统的工作原理是通过接收至少3颗卫星的信号,来计算出自身的位置,通过接收更多卫星的信号,可以进一步提高定位的精准度。
在船舶导航中,GPS系统可以实时监测船舶的位置,自动更新导航数据,提供精准的航行信息。
通过GPS系统,船舶可以在海洋中准确导航,在复杂的环境中有效避开障碍物,并且可以及时调整航向和速度,确保船舶的航行安全。
二、雷达系统雷达系统是船舶上常用的安全设备,它可以通过发射和接收无线电波,来探测远处的障碍物、其他船只以及陆地等。
雷达系统通过测量目标物体反射回来的电磁波的时间和方向,来确定目标物体的位置、距离和大小等信息。
在船舶导航中,雷达系统可以提供远距离的目标检测能力,帮助船长及时发现前方的障碍物和其他船只,避免碰撞和其他危险情况。
雷达系统还可以提供航向线和距离测量服务,帮助船舶确定安全的航线和航行距离。
三、电子海图电子海图是一种通过电子设备显示的海图,它可以实时更新航行信息、水深、潮汐和地理环境等数据。
电子海图系统可以与GPS卫星导航系统和雷达系统等设备连接,提供全面的航行信息和导航功能。
电子海图系统的工作原理是通过接收卫星定位和船舶自身的传感器数据,来实时更新地图显示的航行信息。
船舶可以通过电子海图系统来确定最佳的航行路径,避开浅滩和其他障碍物,同时还可以显示目标物体的位置和形状等信息。
四、自动舵自动舵是船舶导航系统中的关键设备,它可以根据预设的航行路径和指令,自动调整舵机和推进器的角度,来控制船舶的航向和速度。
舰艇指控系统对电磁脉冲的易感性
( 军 大 连 舰 艇 学 院 , 连 1 6 1) 海 大 1 0 8
摘 要 : 析了电磁脉冲进入 C I 分 s 系统的途径 , 介绍 了其对舰 载指控 系统 的毁伤能力 , 析 了舰 艇指控 系统 相对 于电 分
磁 脉 冲武 器 的 薄 弱 环 节 , 出 了 在 海 上 作 战 时 对 于 电 磁 脉 冲 武器 进 行 防 护 的重 要 性 。 提
探测 器 和接 收器 。后 门耦 合 是指 通过 为其 它 目的预
留 的或 者是 腔体 结构 中偶 然 留下 缝 隙或者 4 进行 qL
耦 合 。后 门耦 合 通 道 包 括接 缝 、 缝 、 口、 板 的 裂 舱 薄
入 口通 道 、 、 以及 未 屏蔽 好或 没 有屏蔽 的导线 。 窗 门
方关 系 而迅 速下 降 . 、 / 于这个 频段 下 限 的入 射 场 , J 有
1 电磁 脉 冲 能 量 进 入 C I系统 的途 径 。
c I系统 即指 挥 控 制 通 信 和 情 报 系 统 , 指 正 。 是
关键词: 电磁脉 冲武器 ; 毁伤机 理 ; 系统 指控
中图分 类号 : N 7T 84 T 9 ;J6
文 献标 识码 : A
文 章编 号 :N 211(080— 3—5 C 3—4320 )2 0 3 0 0
S s e i ii y o hi m m a d a nt o y t m o El c r m a ne i le u c ptb lt fS p Co n nd Co r lS s e t e t o g tc Pu s
耦 合 的程 度一 般用耦 合 截 面来 表征 。对 于前 门
以其人 之道 还 治其 人 之 身 。相 反 , 果 不 了解 电磁 如 脉 冲武器 对 电子 信 息 系统 的 强 大杀 伤力 , 加 强 或 不 不知 道如 何加 强 C I系统 的 防护 , 么海 军 水 面 舰 。 那 艇将 会在 未来 高 技术 条件 下 的局 部 冲突 中遭 受致 命
AIS系统的工作原理

AIS系统的工作原理
什么是AIS系统?
AIS(Automatic Identification System,自动识别系统)是一种专
门用于船舶安全监测的技术,是国际水上交通安全管理的重要组成部分。
AIS系统可以在无线电频段内发送船只的详细信息,让船舶有效地进行互
联互通,确保航行安全。
它可以使船只实时发布信息,包括船只的位置、
ID号、轨迹、航速、船员数量、状态等,以实现距离管理和避碰处理。
AIS系统是典型的智能网络,结构简单,操作方便。
它有两个主要部分:AIS发射机和AIS接收器。
AIS发射机是用于在无线电频段内发送船
只的详细信息的设备,AIS接收器是用于接收该频段内发送的信息的设备。
AIS系统的工作原理如下:
(2)AIS发射机发射船只的详细信息。
AIS发射机通过VHF频段把船
只的位置信息,ID号,轨迹,航速,船员数量,状态等等信息以包的形
式发送出去。
(3)AIS接收器接收船只的信息,并存储在其中。
AIS接收器收到发
射机发出的包后,首先进行信号质量检查,将发射机的信息进行解码,然
后将解码后的信息存入AIS接收器内部存储空间。
tac技术原理
tac技术原理Tac技术,即“Tactical Air Command(战术空中指挥)技术”,是一种用于军事指挥和控制的先进技术系统。
它在战场上起到了至关重要的作用,提供了高效的指挥和控制手段,以确保作战行动的协调和成功。
本文将详细探讨Tac技术的原理及其在战场上的应用。
一、Tac技术的概述Tac技术是一种综合的信息系统,通过无线通信、指挥控制设备和计算机技术等手段,实现了指挥员与作战单位之间的实时通信和信息交流。
它的主要目的是提供战场态势感知、作战指挥和打击决策等功能,为指挥员提供全面的战场信息,以便更好地指挥作战行动。
二、Tac技术的关键要素1. 信息传输和共享:Tac技术通过高速传输网络,将各个作战单位的信息汇集到一个中央指挥控制中心,并实现信息的共享与传输。
这样,指挥员就可以实时了解战场的态势,做出相应的指挥决策。
2. 实时通信能力:Tac技术使用了先进的通信设备,能够实现指挥员与作战单位之间的实时通信。
无论是在地面上还是在空中,作战单位都可以通过无线通信设备与指挥员保持联系,及时传达战场信息和接受指令。
3. 数据处理和决策支持:Tac技术利用计算机技术,对海量的战场数据进行处理和分析,提供决策支持。
指挥员可以通过触摸屏和界面友好的工具,查看战场态势图、进行目标分析和选择打击手段,辅助做出战场指挥决策。
三、Tac技术的应用领域1. 空中作战:在空中作战中,Tac技术可以实时追踪和控制飞机,提供飞行数据和态势信息。
指挥员可以根据实时数据做出指挥决策,例如调整编队、选择目标和协调空中支援。
2. 地面作战:在地面作战中,Tac技术可以实时追踪和控制战车、步兵和其他作战装备。
指挥员可以通过Tac技术查看地面态势图、指挥作战单位行动,并与各个作战单位保持实时通信。
3. 海上作战:在海上作战中,Tac技术可以实时追踪和控制军舰和潜艇。
指挥员可以通过Tac技术了解海上态势、协调调动作战单位,并指挥海上打击行动。
舰船自动化管理与控制系统的设计与开发

舰船自动化管理与控制系统的设计与开发一、引言舰船自动化管理与控制系统是现代军舰的关键组成部分之一。
随着科技的不断发展与舰船技术的不断更新,舰船自动化管理与控制系统的设计与开发变得越来越重要。
本文将对舰船自动化管理与控制系统的设计与开发进行探讨,并介绍一些实际应用的案例。
二、舰船自动化管理与控制系统的基本架构舰船自动化管理与控制系统主要包括监测与控制子系统、信息传输与处理子系统以及人机交互界面子系统三大部分。
1. 监测与控制子系统:监测与控制子系统主要负责对舰船各个系统的状态进行监测与控制。
其中,监测部分主要通过传感器对各种参数进行实时监测,例如温度、压力、流量等。
控制部分则根据监测到的数据,通过执行器对相应的设备进行控制,例如阀门、泵等。
2. 信息传输与处理子系统:信息传输与处理子系统主要负责将监测与控制所获得的数据进行传输与处理。
该子系统通常采用网络技术,将数据传输至舰船内的中央控制中心,并进行分析与处理。
同时,该子系统还可以将数据传输至地面指挥部,以实现远程监控与控制。
3. 人机交互界面子系统:人机交互界面子系统主要负责与操作人员进行交互。
该子系统通常采用液晶显示器、触摸屏等设备,为操作人员提供直观、友好的界面。
通过该界面,操作人员可以实时监测舰船各个系统的状态,并进行相应的操作。
三、舰船自动化管理与控制系统的设计流程舰船自动化管理与控制系统的设计过程通常包括需求分析、系统设计、系统开发、系统测试与调试等阶段。
1. 需求分析阶段:在需求分析阶段,需明确用户的需求与系统的功能。
这一阶段需要与用户进行详细的沟通,了解用户对系统性能、稳定性以及可靠性等方面的要求。
此外,还需要对舰船的具体情况进行分析,确定各个子系统的功能与性能指标。
2. 系统设计阶段:系统设计阶段是根据需求分析阶段的结果,确定整个系统的总体架构与模块划分。
在这个过程中,需要选择合适的硬件设备与软件平台,并设计相应的算法与控制策略。
美国海军新一代水面舰艇作战系统体系架构

收稿日期: 2017⁃11⁃08
修回日期: 2017⁃11⁃29
作者简介: 王 达( 1985⁃) ,男,高级工程师,博士,研究方向
为水声电子信息系统。
左艳军(1978⁃) ,男,高级工程师,博士。
要素之一。 目前,美国最新的舰艇作战系统主要有两种,即装
备于航母 / 两栖舰的舰艇自防御系统( SSDS MK2) 和装 备于驱逐舰的“宙斯盾”系统(基线 9)。 1������ 1 舰艇自防御系统
第 40 卷 第 1 期 2018 年 2 月
指挥控制与仿真 Command Control & Simulation
Vol������ 40 No������ 1 Feb������ 2018
文章编号:1673⁃3819( 2018) 01⁃0132⁃09
美国海军新一代水面舰艇作战系统体系架构
王 达1, 左艳军1, 郭 俊2 (1.中国船舶重工集团公司第七一四研究所, 北京 100101;2.中国船舶重工集团公司第七一五研究所, 杭州 310023)
舰艇自防御系统,主要担负航母等大型水面舰艇 近末端对空防御任务,是整个航母编队对空防御的最 后一层,通过智能快速决策,自动控制中 / 近程舰空导 弹、近程反导舰炮、电子对抗等多种软硬武器,协同抗 击来袭导弹等空中威胁[1-3] 。
1)发展历程(如图 1) 第一代舰艇自防御系统 MK1,1997 年达到完全作 战能力。 1998 年,美国海军增强了 SSDS MK 1 编队协 同作战能力,开发研制了 SSDS Mk2 Mod 0。 第二代舰艇自防御系统 MK2,2004 年,美国海军 开展了 SSDS 开放体系结构升级工作。 2008 年,首套采 用全舰计算环境和开放式体系结构的舰艇自防御系统 交付美国海军。 舰艇自防御系统从 MK2 Mod1 / 2 开始逐步采用开 放式体系结构,软 / 硬件架构图如图 2 和图 3 所示。 2) 应用现状 目前,舰艇自防御系统 MK2 总共发展了 6 种版本,
控制系统中的船舶控制技术

控制系统中的船舶控制技术船舶控制技术是指通过控制系统对船舶的运动和操作进行控制的技术手段。
在现代化的船舶中,船舶控制系统可以说是船舶的大脑,对于船舶的安全、航行、操纵能力至关重要。
本文将以控制系统中船舶控制技术为主题,介绍控制系统中常见的船舶控制技术。
一、船舶自动导航技术船舶自动导航技术是船舶控制系统中的一种重要技术,它通过使用传感器、电子设备和计算机等装置,实现船舶航行的自动导航。
船舶自动导航技术不仅可以提高船舶的航行安全性,还可以提高航行的精度和效率。
1. 全球卫星定位系统(GPS)技术全球卫星定位系统(GPS)是一种常用的船舶自动导航技术。
它通过接收卫星信号,确定船舶的位置、速度、方向等相关信息,从而实现船舶的自动导航和航行管理。
在航行中,船舶通过GPS技术可以准确地确定船舶的位置,实时更新船舶的航行路线,进一步提高船舶的航行安全性。
2. 惯性导航系统(INS)技术惯性导航系统(INS)是一种基于惯性力学原理的船舶自动导航技术。
它通过使用陀螺仪和加速度计等装置,测量船舶的加速度和转动角速度,从而推算出船舶的位置、速度和航向等信息。
惯性导航系统具有抗干扰性强、高精度等特点,可以在复杂的海况下实现船舶的自动导航。
二、船舶操纵技术船舶操纵技术是指通过操纵设备和控制系统对船舶的运动进行控制的技术手段。
船舶操纵技术的发展不仅提高了船舶的操纵能力,还提高了船舶的安全性和航行效率。
1. 舵机控制技术舵机控制技术是船舶操纵技术中的一种重要技术。
船舶通过舵机控制系统可以实现舵轮的旋转,从而改变船舶的航向。
舵机控制技术可以通过传感器和控制器等装置实时监测船舶的航向变化,并通过控制舵机的角度来实现船舶的操纵。
2. 推进器控制技术推进器控制技术是船舶操纵技术中的另一种重要技术。
船舶通过推进器控制系统可以控制船舶推进器的工作状态,从而改变船舶的速度和方向。
推进器控制技术通过控制器和电动传动装置等装置实现对推进器的控制,提高了船舶的操纵性能。
远程扫雷指控系统
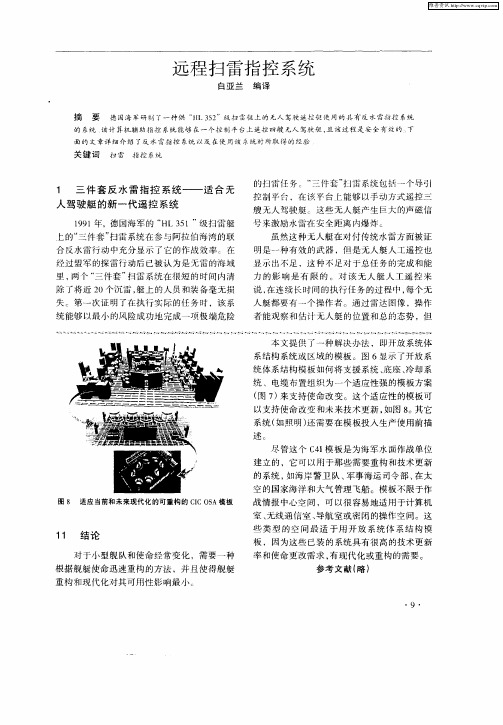
基 本 的 反 水 雷 指 控 系统 慨 念 的 一个 方 i l i f
海 军能评 估任何 H F et 1的态势
是 , 无人 艇操控 期 间 , 在 以具 有高 度 自动 化 和灵
图 1 导 引控 制 平 台和 无 人 艇 上 的 反水 雷 指 控 系 统 的 组成
战情 报 中心空 间 ,可 以很 容 易地适用 于计算 机
室 、 线通 信室 、 无 导航 室或 密 闭的操作 空 间。这
1 结 论 1
对于小 型舰 队和使命 经 常变化 ,需 要一 种 根 据舰 艇使命 迅速 重构 的方 法 ,并 且使 得舰 艇 重 构 和现 代化对其 可用性 影 响最 小 。
些 类 型 的 空 间 最 适 于用 开 放 系统 体 系结 构 模
板 ,因 为这些 已装 的 系统 具 有很高 的技术 更新 率 和使命 更改需 求 , 有现 代化 或重构 的需要 。
参 考文 献 ( ) 略
・
9・
维普资讯
《 报 指 挥 挖 制 系统 仿 技 术 }0 2年 第 6期 情 20
‘1 ‘ ・… 一 1 0 ‘ , ・ H % ‘ ’ ‘ | 、
统 能够 以最小 的风险 成功地 完成 一项 极端危 险
嵋 ‘’ : , - ’、 q ‘ 岛 ‘ 蠕 ‘一 、 ' _' ; ‘ ‘ 一
本文 提供 了一 种解 决办法 ,即开 放系统 体
述。
尽 管这 个 C I 板是 为海军 水 面作战单 位 4模
建 立 的 ,它可 以用 于那 些需 要重构 和技术更 新
的 系统 , 如海 岸 警卫 队 、 事海运 司令部 、 太 军 在 空 的国家 海洋 和大 气管理 飞船 。模板 不 限于作
概括鹦鹉螺号的科学原理

概括鹦鹉螺号的科学原理鹦鹉螺号是一艘具有跨大洋寻找目标和气象预测能力的自主航行无人舰艇,其科学原理主要包括自主导航、能量供应、通信系统和传感器技术等方面。
自主导航是鹦鹉螺号实现无人航行的基础,它利用全球导航卫星系统(GNSS)和惯导系统,通过对船舶位置、速度和姿态的精准测量与计算,来实现航行的自主性。
GNSS是利用卫星星座和地面接收设备共同完成定位和导航的技术,通过接收多颗卫星发射的信号来计算自身位置。
惯导系统则是通过测量船舶加速度和角速度来估计其位置和姿态。
结合两种导航系统的数据,鹦鹉螺号可以实时获取当前位置和航向,从而做出航行决策。
此外,自主航行时还需要考虑避碰规避其他船只和障碍物的能力,一般采用雷达、摄像头等传感器获取周围信息,再与航行规则相结合做出避碰决策。
鹦鹉螺号的能量供应是实现长时间无人航行的关键。
一般采用太阳能电池板和储能系统相结合的方式。
太阳能电池板是利用光伏效应将太阳能转化为电能的装置,通过接收阳光来为舰艇提供电力。
同时,船体上还设置储能系统,将太阳能转化的电能进行储存,以应对夜间或阴天无法充电的情况。
这样的能源供应系统可以实现鹦鹉螺号的长时间航行,减少对传统燃油的需求,降低运行成本,同时也具有环保的特点。
通信系统是鹦鹉螺号实现远程控制和数据传输的重要组成部分。
通常采用卫星通信系统,通过与地面站点、卫星进行通信,将舰艇的位置、状态和其他相关数据传输回地面,实现实时监控和远程控制。
卫星通信系统具有宽带、高速和全球覆盖的特点,不受地理位置限制,适用于远程海洋环境。
传感器技术则是鹦鹉螺号实现环境感知和目标探测的关键。
鹦鹉螺号通常配备多种传感器,如摄像头、声纳、雷达等,用于获取周围环境的信息。
其中,摄像头主要用于拍摄海洋环境和舰艇周围的照片和视频,以及用于目标识别和导航。
声纳则主要用于海底地形探测和障碍物检测。
雷达则主要用于目标探测和距离测量。
通过这些传感器的数据采集和处理,可以实时获取舰艇周围的环境信息,从而做出相应的航行决策和任务执行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水面舰艇指控系统原理
水面舰艇指控系统是一种重要的舰船战斗指挥系统,其主要功能是实
现对水面目标的搜索、定位、追踪和攻击。
下面将介绍水面舰艇指控
系统的原理。
首先,水面舰艇指控系统主要由雷达和武器控制系统两部分组成。
雷
达部分负责对目标进行搜索和跟踪,而武器控制系统则负责对目标进
行打击。
其中,雷达可以通过多种方式进行搜索,如机械扫描、电子
扫描和相控阵扫描等。
不同的雷达方式有着各自的优缺点,在实际应
用中需要根据具体情况进行选择。
其次,水面舰艇指控系统中的武器控制系统主要包括炮火控制系统和
导弹火控系统两部分。
炮火控制系统主要用于对近距离目标进行打击,而导弹火控系统则用于对远距离目标进行打击。
在实际应用中,这两
个部分可以同时使用,以提高打击效率。
此外,在水面舰艇指控系统中还有一个重要的组成部分——信息处理
与显示装置。
该装置主要用于将雷达和武器控制系统获取的信息进行
处理,并将结果显示给指挥员,以便指挥员进行决策。
总之,水面舰艇指控系统是一种集雷达、武器控制系统和信息处理与
显示装置于一体的综合性指挥系统。
其主要原理是通过雷达对目标进
行搜索和跟踪,并通过武器控制系统对目标进行打击。
在实际应用中,需要根据具体情况选择不同的雷达方式和武器控制系统,以提高打击
效率。