槽轮的计算
机械设计基础第5章

5.4 螺 旋 机 构
5.4.1 螺纹的参数、类型和应用 1.螺旋线、螺纹的形成 在直径为d2的圆柱面上,绕一底边长为πd2的 直角三角形,底边与圆柱体的底面重合,则斜边 在圆柱表面上将形成一条螺旋线,如图5.18(a) 所示。取一平面图形(如图5.18(b)所示),使其 一边与圆柱体的母线贴合,并沿螺旋线移动,移 动时保持此平面图形始终通过圆柱体的轴线,此 平面图形在空间形成的轨迹构成螺纹。
按从动件的间歇运动方式分类,它又有以下 几种形式。 (1) 单向间歇转动如图5.1、图5.2所示,从动 件均作单向间歇转动。 (2) 单向间歇移动如图5.3所示,当主动件1 往复摆动时,棘爪2推动棘齿条3作单向间 歇移动。 (3) 双动式棘轮机构如图5.4所示,主动摇杆 1上装有主动棘爪2和2′,摇杆1绕O1轴来回 摆动都能使棘轮3沿同一方向间歇转动,摇 杆往复摆动一次,棘轮间歇转动两次。
2. 棘轮机构的类型 根据工作原理,棘轮机构可分为齿式棘 轮机构和摩擦式棘轮机构两大类。 1) 齿式棘轮机构 齿式棘轮机构的工作原理为啮合原理。 按啮合方式分类,它有外啮合(如图5.1所示) 和内啮合(如图5.2所示)两种型式。内啮合棘 轮机构由轴1、驱动棘爪2与止回棘爪4、棘 轮3以及弹簧5组成。
2) 摩擦式棘轮机构 摩擦式棘轮机构的工作原理为摩擦原理。在 图5.6所示的机构中,当摇杆往复摆动时, 主动棘爪2靠摩擦力驱动棘轮3作逆时针单 向间歇转动,止回棘爪4靠摩擦力阻止棘轮 反转。由于棘轮的廓面是光滑的,所以又 称为无棘齿棘轮机构。该类机构棘轮的转 角可以无级调节,噪声小,但棘爪与棘轮 的接触面间容易发生相对滑动,故运动的 可靠性和准确性较差。
1. 间歇式送进 图5.8所示为浇注流水线的送进装置,棘轮与带轮固连 在同一根轴上,当活塞1在汽缸内往复移动时,输送带2间 歇移动,输送带静止时进行自动浇注。 2. 超越运动 图5.9所示为自行车后轴上的内啮合棘轮机构,飞轮1 即是内齿棘轮,它用滚动轴承支承在后轮轮毂2上,两者 可相对转动。轮毂2上铰接着两个棘爪4,棘爪用弹簧丝压 在棘轮的内齿上。当链轮比后轮转的快时(顺时针),棘轮 通过棘爪带动后轮同步转动,即脚蹬得快,后轮就转得快。 当链轮比后轮转的慢时,如自行车下坡或脚不蹬时,后轮 由于惯性仍按原转向转动,此时,棘爪4将沿棘轮齿背滑 过,后轮与飞轮脱开,从而实现了从动件转速超越主动件 转速的作用。按此原理工作的离合器称为超越离合器。
槽轮工艺课程设计
槽轮工艺课程设计一、课程目标知识目标:1. 理解槽轮工艺的基本概念,掌握槽轮的结构、工作原理及其在机械传动中的应用;2. 掌握槽轮工艺的关键参数计算方法,包括槽轮的直径、槽距、槽深等;3. 了解槽轮材料的选择原则,掌握常见槽轮材料的性能及适用场合。
技能目标:1. 能够运用所学知识进行槽轮工艺的参数设计和计算;2. 能够分析槽轮在实际应用中的优缺点,并提出相应的改进措施;3. 能够运用槽轮工艺知识解决实际问题,具备一定的创新能力和实践操作能力。
情感态度价值观目标:1. 培养学生对槽轮工艺的兴趣,激发他们探索机械传动领域的热情;2. 培养学生严谨、认真的学习态度,使他们认识到理论知识在实际工程中的重要性;3. 培养学生的团队协作精神,提高他们在团队中沟通、交流、合作的能力。
本课程针对高年级学生,具有较强的理论性和实践性。
结合学生特点,课程目标旨在使学生在掌握槽轮工艺知识的基础上,提高分析问题、解决问题的能力,培养他们的创新意识和实际操作技能。
课程目标具体、可衡量,便于教学设计和评估,有助于学生和教师明确课程预期成果。
二、教学内容1. 槽轮工艺概述- 槽轮的定义、分类及其应用领域- 槽轮工艺的发展历程及发展趋势2. 槽轮的结构与工作原理- 槽轮的组成、结构特点- 槽轮工作原理及传动特点3. 槽轮工艺参数设计- 槽轮直径、槽距、槽深等参数的计算方法- 槽轮材料选择原则及常用材料性能- 槽轮强度、刚度及耐磨性设计要点4. 槽轮工艺在实际应用中的案例分析- 槽轮在机械传动系统中的应用实例- 槽轮工艺在实际应用中的优点与不足- 案例分析与讨论5. 槽轮工艺的创新与发展- 槽轮工艺的改进措施及新技术应用- 国内外槽轮工艺研究动态及发展趋势- 创新能力培养与实践操作技能提升教学内容根据课程目标制定,涵盖槽轮工艺的基本概念、结构原理、参数设计、案例分析及创新发展等方面,确保内容的科学性和系统性。
教学大纲明确教学内容的安排和进度,与教材章节相对应,便于教师组织教学和学生自主学习。
健身球分类机课程设计
江西农业大学工学院《机械原理课程设计》课程题目:健身球检测分类机专业:机械制造及自动化姓名:学号:班级:指导老师:康丽春目录1.设计要求................................................... 错误!未定义书签。
2:各机构方案比较、选择....................................... 错误!未定义书签。
进料机构................................................... 错误!未定义书签。
:送料机构.................................................. 错误!未定义书签。
方案1:曲柄滑块机构................................... 错误!未定义书签。
方案2:凸轮滑块机构................................... 错误!未定义书签。
方案3:四杆机构....................................... 错误!未定义书签。
:送料机构方案分析、比较.................................. 错误!未定义书签。
:送料机构方案确定....................................... 错误!未定义书签。
检测机构:................................................. 错误!未定义书签。
方案1:凸轮+滑道机构.................................. 错误!未定义书签。
方案2:槽轮+转盘机构+半圆形环状管道................... 错误!未定义书签。
:检测机构方案分析、比较................................. 错误!未定义书签。
其余部分为锁止圆弧。当两轮齿进入啮合时,与齿轮传动一样
外啮合不完全齿轮机构
内啮合不完全齿轮机构
铣刀 8
9
6 7
2
球拍
靠模凸轮
不完全齿轮1 不完全齿轮1
5
1
34
乒乓球拍专用靠模铣床
退煤饼
压制
不完全齿轮
锁止弧
填料
填料
锁止弧
蜂窝煤饼压制机
使运动平稳
瞬心线附加杆
§6-4 凸轮式间歇运动机构
1.工作原理及特点 圆柱凸轮连续回转,推动均布有柱销的从动圆盘间
歇转动。 特点:从动圆盘的运动规律取决于凸轮廓线的形状。 优点:可通过选择适当的运动规律来减小动载荷、避
槽顶半径s 槽深h
拨盘轴径d1 槽轮轴径d2 槽顶侧壁厚b
计算公式或依据
由工作要求确定 R
由安装空间确定 R=Lsinφ=Lsin(π /z) r
由受力大小确定 r≈R/6
s=Lcosφ=Lcos(π /z)
s
h≥s-(L-R-r)
d1≤2(L-s) d2≤2(L-R-r)
b=3~5 mm 经验确定
如果想得到k≥0.5的槽轮机构,则可在拨盘上多装几个圆 销,设装有n个均匀分布的圆销,则拨盘转一圈,槽轮 被拨动n次。故运动系数是单圆柱销的n倍,即:
k= n(1/2-1/z) ∵ k≤1 得:n≤2z/ (z -2)
提问:why k≤1? 事实上,当k=1时,槽轮机构已经不具备间歇运动特性了。
槽数z
免冲击、适应高速运转的要求。定位精确、且 结构紧凑。 缺点:凸轮加工较复杂、安装调整要求严格。
2.类型及应用 类型:圆柱凸轮间歇运动机构、蜗杆凸轮间歇运动机构
R2
圆柱凸轮间歇运动机构
封口
灌浆
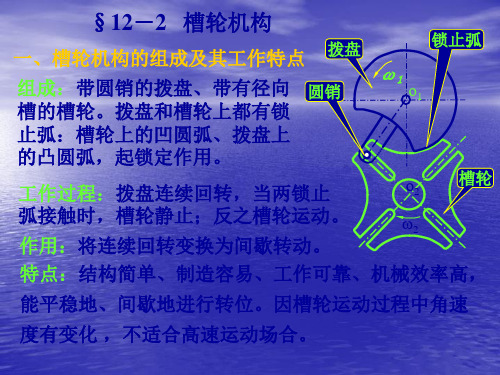
槽轮机构的组成及其特点
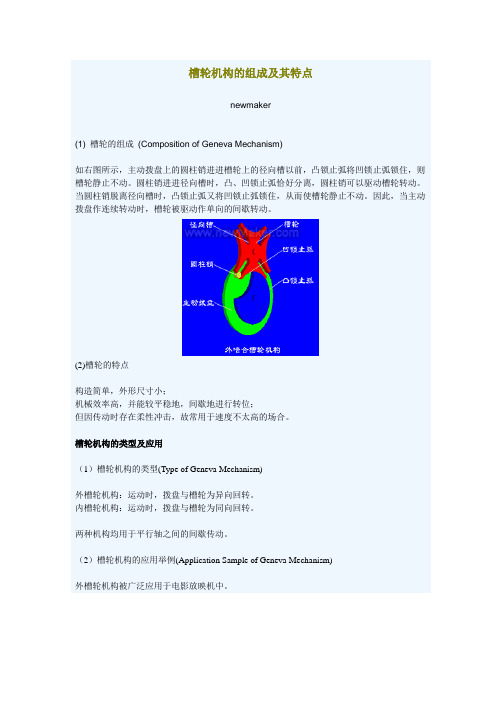
槽轮机构的组成及其特点newmaker(1) 槽轮的组成(Composition of Geneva Mechanism)如右图所示,主动拨盘上的圆柱销进进槽轮上的径向槽以前,凸锁止弧将凹锁止弧锁住,则槽轮静止不动。
圆柱销进进径向槽时,凸、凹锁止弧恰好分离,圆柱销可以驱动槽轮转动。
当圆柱销脱离径向槽时,凸锁止弧又将凹锁止弧锁住,从而使槽轮静止不动。
因此,当主动拨盘作连续转动时,槽轮被驱动作单向的间歇转动。
(2)槽轮的特点构造简单,外形尺寸小;机械效率高,并能较平稳地,间歇地进行转位;但因传动时存在柔性冲击,故常用于速度不太高的场合。
槽轮机构的类型及应用(1)槽轮机构的类型(Type of Geneva Mechanism)外槽轮机构:运动时,拨盘与槽轮为异向回转。
内槽轮机构:运动时,拨盘与槽轮为同向回转。
两种机构均用于平行轴之间的间歇传动。
(2)槽轮机构的应用举例(Application Sample of Geneva Mechanism)外槽轮机构被广泛应用于电影放映机中。
(3)球面槽轮机构(Sphere Geneva Mechanism)当需要在两相交轴之间进行间歇传动时,可采用球面槽轮机构。
右图为球面槽轮机构。
槽轮机构的运动系数及运动特性(1)槽轮机构的运动系数k (Motion Factor of Geneva Mechanism)k=td/t又因拨盘1一般为等速回转,因此时间的比值可以用拨盘转角的比值来表示。
可得外槽轮机构运动系数的另一表达式:由于运动系数k应大于零,所以由上式可知外槽轮径向槽的数目z应大于3。
又由上式可知,运动系数k总是小于0.5的。
也就是说,在这种槽轮机构中,槽轮的运动时间总是小于其静止的时间。
假如在拨盘1上均匀分布地装有n个圆销,则当拨盘转动一周时,槽轮将被波动n次,故运动系数是单圆销k=n(1/2-1/z)又因k值应小于或即是1,即n(1/2-1/z)≤1由此得n≤2z/(z-2)由此式可得槽轮z与圆销数n的关系如下表2)外槽轮机构的运动特性(Motion Property of Geneva Mechanism)如图所示为外槽轮机构在运动过程中的任一位置。
第四讲 槽轮机构
动力传递
当主动拨盘转动时,其上的槽口与从 动槽轮的径向槽相啮合,带动从动槽 轮转动。
主动拨盘通过啮合传递动力给从动槽 轮,使其完成预定的间歇运动。
间歇运动
由于主动拨盘和从动槽轮的槽数是有 限的,因此从动槽轮的运动是间歇性 的,即转动一定角度后停止,等待下 一次啮合。
槽轮机构的运动特性
01
02
03
04
安装过程
按照装配图纸要求,将各部件正确组装在一起,注意配合间隙和紧 固力矩。
调试过程
启动设备,观察槽轮机构运转情况,检查各部件是否工作正常,调整 相关参数以达到设计要求。
常见故障及排除方法
转动不灵活
可能是轴承损坏或润滑不良,需更换 轴承或加注润滑油。
噪音过大
可能是齿轮磨损或啮合不良,需更换 齿轮或调整啮合间隙。
间歇性运动
能够实现主动件连续 转动,从动件周期性 间歇运动的特性。
结构简单
主要由轮盘和销或凸 轮组成,结构相对简 单。
运转平稳
在运转过程中,槽轮 机构能够保持相对平 稳的运动状态。
定位准确
通过合理的槽轮设计 和配合,可以实现较 高的定位精度。
槽轮机构的应用领域
自动机械
在自动机械中,槽轮机构可用于 实现工件的间歇进给、分度等动
外啮合槽轮机构
01
02
03
结构简单
由主动拨盘和从动槽轮组 成,通过两者之间的外啮 合实现传动。
传动比稳定
在主动拨盘匀速转动时, 从动槽轮实现间歇运动, 传动比相对稳定。
承载能力较强
适用于中、低速及轻载场 合。
内啮合槽轮机构
结构紧凑
主动拨盘位于从动槽轮内部,整体结构更加紧凑 。
传动效率高
基于ADAMS槽轮机构动力学仿真_宋国亚
≥7
1~2
表 2 尺 寸 列 表
名称
符号
数 值/mm
公式
说明
中心距
L
153.13
根据安装空间
销槽接触角度
θ
120°
运动系数设计得
拨盘转角
α1
15°
运动系数设计得
槽轮转角 圆柱销转动半径
槽顶高 圆柱销半径
φ2 R转
S R圆
45° 125.02 45.80
5.63
R转 =siLnθ*sinφ22 L
烄g ≥0
Fn >0 烅Fng =0
(5)
dg
Fn 烆
dt
=0
式 中 :g——— 接 触 作 用 点 的 距 离 ;
设备,然而目前的 安 瓿 针 剂 自 动 上 料 设 备 由 于 其 关键传动件槽轮 机 构 无 法 实 现 大 的 转 停 比,国 内 外一些学者对槽轮机构进行了相关研究。
文献[1]研究 了 槽 轮 机 构 存 在 的 一 系 列 固 有 缺 陷 ,比 如 其 动 程 不 可 调 节 ,转 角 也 不 能 太 小 。 文 献[2]指 出 了 槽 轮 机 构 在 起、停 时 的 加 速 度 大,有 冲击,并随着转速 的 增 加 或 槽 轮 槽 数 的 减 少 而 加 剧问题。为了克 服 槽 轮 机 构 这 种 结 构 缺 陷,文 献 [3]提 出 了 一 种 改 进 措 施,其 通 过 与 其 他 机 构,如
ADAMS based simulation on geneva mechanism dynamics
SONG Guoya1, WANG Hui 1* , ZHAO Junpeng1, CHANG Xiaopeng2
几种常用机构
0
z 2
要使槽轮有停歇,其运动时间 t2< t1,即: 2z k 1 z2 (k=1~3), (k=1~5), z 4 时 k 4 z 3 时 k6 10 k z5 时 (k=1~3)。
3
(2)内槽轮机构
拨盘转过一周的时间为:
t1
2
1
若拨盘上有k 个圆柱销, 则拨盘每转一周, k 次拨 动槽轮。每次拨动槽轮的 运动时间为: '
β1
3
β3
1 cos 1 2 2 3 1 sin 1 cos M
1
1 sin 2 3 cos 2 M 3 cos 3
所以:ω1=ω3
万向联轴节的选择:
1)所需传递的转矩大小和性质以及对缓冲减振
功能的要求。例如,对大功率的重载传动, 可选用齿式联轴器;对严重冲击载荷或要求 消除轴系扭转振动的传动,可选用轮胎式联 轴器等具有高弹性的联轴器。
棘 轮 机 构
棘 轮 机 构
棘轮机构
槽轮机构
一、槽轮机构的组成及其工作原理
从动槽轮
主动拨盘转动 从动槽轮转动
圆柱销进入径向槽
锁止弧松开
锁止弧
拨盘转过角21
槽轮转过22
径向槽
圆柱销脱出径向槽 圆柱销
锁止弧
槽轮另一锁止弧被拨盘锁止弧锁住
拨盘转动、槽轮静止
主动拨盘
二、槽轮机构的基本类型及其应用 常见的槽轮机构有两种类型:
R l s i n 2 s i n a z
当槽数较少时,加速度较大,运动 平稳性差;当槽数增多后,加速度变化 较小,运动较平稳。(设计时槽轮的槽 数不宜太少也不宜太多,一般z=4~8)
内槽轮机构的运动参数
六槽槽轮机构尺寸计算
六槽槽轮机构尺寸计算一、六槽槽轮机构尺寸计算相关知识大集合(一)基础概念1. 啥是六槽槽轮机构呢?简单来说呀,它就是一种机械结构,由槽轮和拨盘等部件组成的哦。
这槽轮上有六个槽,这些槽在整个机构的运转中可是起着超级重要的作用呢。
比如说在一些自动化生产设备里,它就能按照特定的规律来控制运动的间歇啥的。
2. 槽轮机构的组成部分除了槽轮和拨盘,还有机架呀。
机架就像是它们的家一样,把这些部件稳稳地固定在合适的位置上,这样整个机构才能正常工作呢。
(二)尺寸计算相关的重要参数1. 槽轮的直径该怎么确定呢?这可跟很多因素有关哦。
首先得考虑它要承担的负载大小,如果负载大,可能就需要更大的直径来保证强度。
然后呢,还得看它和其他部件的配合关系。
比如说和拨盘的连接部分,如果这个连接要求比较精密,那在计算直径的时候就得把这个因素考虑进去。
2. 槽的尺寸又怎么算呢?槽的宽度要能够容纳拨销顺利地进出,不能太窄,不然拨销容易卡住;也不能太宽,太宽了可能会导致运动不稳定。
槽的深度呢,也要根据拨销的长度等因素来确定,要保证拨销在槽内能够有效地传递动力。
3. 拨盘的尺寸计算也不简单。
拨盘的半径要根据槽轮的尺寸以及它们之间的传动比来计算。
传动比这个概念很重要哦,它决定了槽轮和拨盘之间的运动关系。
如果传动比不合适,整个机构的运动就会乱套的。
(三)尺寸计算中的数学关系1. 槽轮的分度圆直径和槽数之间有个很有趣的数学关系。
一般来说,分度圆直径和槽数是成一定比例的。
比如说,如果我们知道了槽数是6,再结合其他一些已知条件,像中心距之类的,就能算出分度圆直径的大致范围呢。
2. 在计算拨盘和槽轮的中心距的时候,也要用到一些几何知识。
这个中心距会影响到整个机构的紧凑性和运动的平稳性。
如果中心距太大,整个机构就会显得很松散;如果太小呢,又可能会导致部件之间相互干涉。
3. 还有槽轮的节圆半径和拨盘的节圆半径之间的关系。
这两个半径之间的比例关系会影响到动力传递的效率和运动的准确性。
12-2槽轮机构
运动特性分析: ①槽轮运动的ω max、amax随槽数z的增多而减小。 ②存在柔性冲击。Z愈少,冲击愈大。
圆销进入或退出径向槽时,角速度有突槽轮机构
用同样方法可求得内啮合槽轮机构 的运动曲线如图所示。
2 12
1.0 0.75 0.5 0.25 0 -0.25 -0.5 -0.75 0.8 0.4 0.2
ω1
R
o1
-α1≤α≤α1 -φ2≤φ≤φ2 在△ABO2中有如下关系:
AB R sin tg O2 B L R cos
α
α 1 -α 1
A L
φ B
φ2
O2 -φ2
ω2
令λ= R / L,并代入上式得: sin 1 =tg 1 cos
分别对时间求一阶导数、和二阶导数,得:
槽数z 圆销数n 3 1~6 1/6~1
k≤1 得:n≤2z/ (z -2)
4
1~4 0.25~1 5 、6 1~3 ≥7
提问:why k≤1? 事实上,当k=1时,槽轮机构已经不具备间歇运动特性了。
1~2
0.36~1
运动系数k
0.3~1
当z=4及n=2时 k=n(1/2-1/z) = 0.5 说明此时槽轮的运动时间和静止时间相等。
ω1
2α1 90° 90° 2φ
2
ω2
为减少冲击,进入或退出啮合时,槽中心线与拨销中 心连线成90°角。故有: 2α1=π -2φ2 =π -(2π /z) = 2π (z-2)/2z 代入上式
k =1/2-1/z ∵ 将2α1代入得:
k>0 ∴ 槽数 z≥3
可知:当只有一个圆销时,k=1/2-1/z < 0.5 即槽轮的运动时间总是小于其静止时间。 如果想得到k≥0.5的槽轮机构,则可在拨盘上多装几个 圆销,设装有n个均匀分布的圆销,则拨盘转一圈,槽 轮被拨动n次。故运动系数是单圆柱销的n倍,即: k= n(1/2-1/z) ∵
槽轮机构运动系数公式计算
槽轮机构运动系数公式计算槽轮机构的运动系数(Transmission Ratio)可以通过以下公式进行计算:
运动系数 = (Z2 / Z1) * (R1 / R2)
其中:Z1 是主动齿轮(驱动齿轮)的齿数;Z2 是从动齿轮(被驱动齿轮)的齿数; R1 是主动齿轮的半径; R2 是从动齿轮的半径。
这个公式基于槽轮机构的基本原理,其中齿数和半径的比例反映了齿轮的大小关系和转动速度的变化。
运动系数表示了主动齿轮旋转一周时,从动齿轮旋转的周转数。
请注意,该公式适用于简单的槽轮机构,其中只考虑了齿数和半径的影响。
对于更复杂的槽轮机构,可能需要考虑其他因素,例如啮合角和齿轮几何形状的影响。
在实际应用中,建议根据具体的槽轮机构设计和参数,使用更详细的公式和计算方法进行运动系数的计算。
1/ 1。
槽轮机构教学课件

球面槽轮机构
适用于需要较大传动角度的场合,具有较大 的传动范围和较高的传动效率。
04 槽轮机构的运动特性
CHAPTER
运动分析
运动组成
槽轮机构的运动由主动件、从动 件和机架三部分组成。主动件通 过曲柄与原动件相连,从动件通
过槽轮与输出轴相连。
CHAPTER
应用场景一:机械传动系统
总结词:高效稳定
详细描述:槽轮机构在机械传动系统中应用广泛,特别是在需要精确控制和高效 传动的场合。由于其结构简单、工作可靠,能够有效地将主动轮的运动传递给从 动轮,实现稳定的传动效果。
应用场景二:自动化生产线
总结词:高精度
详细描述:在自动化生产线上,槽轮机构能够满足高精度的定位和传动需求。通过精确控制槽轮机构的运动,可以实现工件 在生产线上的准确传递,提高生产效率和产品质量。
特点
结构简单、工作可靠、传动平稳 、易于实现自动化控制等。
工作原理
工作原理
当主动杆以等角速度ω转动时,槽轮上的径向槽与主动杆的切向槽相啮合,使 槽轮获得等角速度转动;同时,当主动杆上的切向槽通过从动杆上的切向槽时 ,从动杆获得往复运动。
工作过程
主动杆转动时,通过切向槽带动槽轮转动,槽轮再通过径向槽带动从动杆往复 运动。
易于维护
槽轮机构易于维护,维修方便。
缺点分析
传动效率低
精度不高
槽轮机构的传动效率较低,存在较大的摩 擦和能量损失。
槽轮机构的传动精度不高,容易受到制造 误差和装配误差的影响。
适用范围窄
对冲击和振动敏感
槽轮机构的适用范围较窄,主要用于间歇 性传动和速度较慢的场合。
槽轮机构对冲击和振动敏感,容易产生噪 声和振动。
槽轮传动比计算

n2=n1xd1÷d2
2000x30÷60=1000转(每分钟)
(电机转速n1) 除以÷ (被动轮转速n2) 等于= (被动轮直径d2) 除以÷ (电机皮带轮直径d1)
转速与皮带轮直径成反比
电机转速÷被动轮转速=被动轮直径÷电机皮带轮直径
n1÷n2=d2÷d1
被动轮转数=电机转数x电机皮带轮直径÷被动轮直径
n2=n1xd1÷d2
被动轮直径=电机转数x电机皮带轮直径÷被动轮转数
d2=n1xd1÷2
例题一 :电机转速n1 是2000转,(每分钟)
被动轮直径d2 是60厘米 ,
电机皮带轮直径d1 是30厘米。
问:被动轮n2转速是多少? 答:被动轮转速是1000转(每分钟)
解:n1=2000转(每分),d2=30厘米,d1=60厘米,
被动轮转数等于电机转数乘以电机皮带轮直径除以被动轮直径
机械原理12(本科)其他常用机构 (2)

一.螺旋机构的运动分析
当螺杆转过φ时,螺母沿其轴向移动的距离为: S=l φ/(2π) 其中l为螺旋的导程 mm。
A段螺纹
螺母
(1)微动螺旋机构
设螺旋机构中A、 B段的螺旋导程分别 为lA、lB , 且两端螺旋 的旋向相同(即同为 左旋或右旋)
B段螺纹
当螺杆转过φ时,螺母的位移s为:
s=(lA-lB)φ/(2π) 因lA、lB相差很小时,故位移s可能很 小,故这种螺旋机构称为微动螺旋机构。 此种机构常用测微计、分度机构中。
即槽轮的运动时间总是小于其静止时间。
如果想得到k ≥0.5的槽轮机构,则可在拨盘上 多装几个圆销,
设装有n个均匀分布的圆销,则拨盘转一圈, 槽轮被拨动n次。故运动系数是单圆柱销的n 倍,即:
k =n(z-2)/2z
∵k<1
槽数z 圆销数n 3
得:n< 2z / (z-2)
4 1~3 5
≥ 6
1~2
内啮合槽轮机构
球面槽轮机构
单动式外啮合槽轮机构
双动式外啮合槽轮机构
内啮合槽轮机构
应用实例: 电影放映机、 自动摄影机、六角车床转塔。
停顿作用
放映机机构
转位作用
六角车床的刀架转位机构
3空闲
车螺纹 4
六槽内槽轮
2
车帽口
圆销 拨盘
切尾 5 卸牙膏筒
6
1 装牙膏筒
六角车床转塔
三、槽轮机构的运动系数及运动特性
故 即
tan f tan
(7-1)
因此棘爪顺利滑入齿根的条件为:棘轮 齿面角θ 大于摩擦角φ 。或棘轮对棘爪 总反力FR 的作用线必须在棘爪轴心O1 和 棘轮轴心O2之间穿过。
四工位专用机床
机械原理课程设计 题目四工位专用机床学 院机电学院专业年级09机自学号姓名0961010426 熊杰指导教师廖华丽二○一一 年 六 月设计任务书1. 设计题目四工位专用机床2. 工作原理及工艺动作过程四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、绞孔工作。
它的执行动作有两个:一是装有四工位工件的回转台转动;二是装有由专用电动机带动的三把专用刀具的主轴箱的刀具转动和移动。
3. 原始数据及设计要求1)刀具顶端离开工作表面65mm,快速移动送进了60mm后,再匀速送进60 mm(包括5mm刀具切入量、45mm工件孔深、10mm刀具切出量),然后快速返回。
回程和工作行程的平均速度之比=2。
K2)刀具匀速进给速度为2 mm/s,工件装、卸时间不超过10 s。
3)生产率为每小时约75件。
4)执行机构能装入机体内。
4. 设计方案提示1)回转台的间歇转动,可采用槽轮机构、不完全齿轮机构、凸轮式间歇机构。
2)主轴箱的刀具移动,可采用圆柱凸轮机构、移动从动件盘形凸轮机构、凸轮—连杆机构、平面连杆机构等。
3)由生产率可求出一个运动循环所需时间60487560T==s,刀具匀速送进60mm所需时间60302t==匀s,刀具其余移动(包括快速送进60mm,快速返回120mm)共需18 s。
回转工作台静止时间为36 s,因此足够工件装卸所需时间。
5. 设计任务1)按工艺动作过程拟定运动循环图。
2)进行回转台间歇转动机构,主轴箱刀具移动机构的选型,并进行机械运动方案评价和选择。
3)按选定的电动机和执行机构的运动参数进行机械传动方案的拟定。
4)活出机械运动方案简图。
5)对传动机构和执行机构进行运动尺寸计算。
Abstracts四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔和绞孔工作的专用加工设备,其执行动作主要包括回转台的间歇转动和主轴箱的左右移动,二者相互协作、共同配合完成孔的精确加工。
针对以上功能和运动要求,本文对四工位专用机床的设计方案作了详细的说明,包括功能分解、运动分析、循环图的拟定、机械运动方案的选择、整体轮廓的大小设计和各机构的尺寸计算。
杨可桢《机械设计基础》(第6版)复习笔记及课后习题详解(含考研真题)-第六章至第七章【圣才出品】

第6章间歇运动机构6.1复习笔记【通关提要】本章主要介绍了棘轮机构、槽轮机构、不完全齿轮机构和凸轮间歇运动机构这四种间歇运动机构的基本原理和特点。
学习时需要牢记特点和相关计算公式。
本章多以判断题和简答题的形式出现,但是在考研中本章出现的几率较小,复习时需酌情删减内容,重点记忆。
【重点难点归纳】一、棘轮机构、槽轮机构、不完全齿轮机构三种间歇运动机构原理比较(见表6-1-1)表6-1-1三种间歇运动机构原理比较二、棘轮机构(见表6-1-2)表6-1-2棘轮机构图6-1-1棘爪受力分析三、槽轮机构(见表6-1-3)表6-1-3槽轮机构四、不完全齿轮机构(见表6-1-4)表6-1-4不完全齿轮机构五、凸轮间歇运动机构1.形式凸轮间歇运动机构通常有两种形式:圆柱形凸轮间歇运动机构和蜗杆形凸轮间歇运动机构。
2.优点运转可靠、传动平稳、定位精度高,适用于高速传动,转盘可以实现任何运动规律,转盘转动与停歇时间的比值可以通过改变凸轮推程运动角来得到。
6.2课后习题详解6-1已知一棘轮机构,棘轮模数m=5mm,齿数z=12,试确定机构的几何尺寸并画出棘轮的齿形。
解:顶圆直径D=m z=5×12mm=60mm齿高h=0.75m=0.75×5mm=3.75mm齿顶厚a=m=5mm齿槽夹角θ=60°棘爪长度L=2πm=2π×5mm=31.4mm棘轮的齿形如图6-2-1所示。
图6-2-16-2已知槽轮的槽数z=6,拨盘的圆销数K=1,转速n1=60r/min,求槽轮的运动时间t m和静止时间t s。
解:槽轮机构的运动特性系数:τ=t m/t=2φ1/(2π)=(z-2)/(2z)=1/3。
拨盘转速n1=60r/min,故拨盘转1转所用的时间为1s。
槽轮的运动时间:t m=τt=1/3s。
槽轮的静止时间:t s=t-t m=2/3s。
6-3在转塔车床上六角刀架转位用的槽轮机构中,已知槽数z=6,槽轮静止时间t s =5/6s,运动时间t m=2ts,求槽轮机构的运动特性系数τ及所需的圆销数K。
槽轮的计算

从动轮轴心到槽口长度:O2A=Lcosβ=91.92mm
主动曲柄长度:R1=O1A=Lsinβ=91.92mm
滚子半径:r3≈R1/6=91.92/6=15.32mm,取15mm
锁止弧半径:RH≤O1A-r3-h=91.92-15-(0.6~0.8)×15
=64.92mm~67.92mm,取65mm
根据对对对及各件尺寸得槽对中心距摩擦对尺寸考对并将对去得
对槽轮机构的设计和计算:
由机械系统图,我们根据前面的齿轮设计得到槽轮的相关数据:
槽数:Z=4
根据结构简图及各构件尺寸得槽轮中心距,并将摩擦轮尺寸考虑进去得:
L>18+40+100+92-135=115mm取L=130mm;
从动轮运动角:2β=360°/Z=90°
主动轮上锁止弧所占角度,以O1A为起始线两边各α角中无锁止弧。
槽轮上槽口至槽底深:
LS=O22-(130-91.92)+15+△
=(68.84+△)mm,式中△是预留的间隙。
周期T=3s
从动轮运动时间:td=α×T/π=(1/2-1/Z)T=T/4=0.75s
从动轮停歇时间:tj=T-td=2.25s