旋转编码器定位使用说明
旋转编码开关(RotaryEncoderswitch)使用说明及程序

旋转编码开关(Rotary Encoder switch)-使用说明及程序具有左转,右转,按下三个功能.4.5 脚是中间按下去地开关接线 1 23 脚一般是中间2脚接地,1.3 脚上拉电阻后,当左转.右转旋纽时,在1.3 脚就有脉冲信号输出了.着这是标准资料:在单片机编程时,左转和右转地判别是难点,用示波器观察这种开关左转和右转时两个输出脚地信号有个相位差,见下图:由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转.所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时地状态就可以判断出是左旋转或是右旋转了.还有另外一种3 脚地,除了不带按钮开关外,和上面是一样地使用.参考:#include "reg51.h"#define uint unsigned intsbit CodingsWitch_A=P1_1;sbit CodingsWitch_B=P1_2;uint CodingsWitchPolling()//{static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引脚地电平static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电平地状态uint tmp = 0;if(CodingsWitch_A&&CodingsWitch_B)st = 1; //if(st) //如果st 为1 执行下面地步骤{if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关地两个引脚都为底电平执行下面地步骤{if(Bold) //为高说明编码开关在向加大地方向转{st = 0;tmp++; //}if(Aold) //为高说明编码开关在向减小地方向转{st = 0;tmp--; //设返回值}}}Aold = CodingsWitch_A; //Bold = CodingsWitch_B; //储return tmp; //}//编码器计数程序void encoder_cnt(void){uchar temp;temp = PIND; //取端口D 管脚信号couch_clr = (temp & 0x08); //取编码器清零信号if(couch_clr != false) //有编码器清零信号{couch_num = 0; //水平床码清零}else{if(encoder_cnt_en == false) //编码器计数模块没有启动{pr_couch_ba = temp & 0x03; //取编码器A.B 相电平信号}else{couch_ba = temp & 0x03; //取编码器A.B 相电平信号if(pr_couch_ba == 0x00){if(couch_ba == 0x01){couch_num++; //水平床码加1}else if(couch_ba == 0x10){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x01){if(couch_ba == 0x11){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x10){if(couch_ba == 0x00){couch_num++; //水平床码加1}else if(couch_ba == 0x11){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x11){if(couch_ba == 0x10){couch_num++; //水平床码加1}{couch_num--; //水平床码减1}}}pr_couch_ba = couch_ba;}}编码器及其计数模块原理飘扬地旋转编码器地检测程序(MCS51)//旋转编码器检测程序,A/B信号分别接在了INT0和INT1上//程序作者:BG4UVR//2005 年1 月15 用KEIL编译.硬件测试通过//注意:编码器地信号,程序未做消抖处理.测试中,A/B信号上各//接了一只104地瓷片电容,工作很正常.如果不接电容,请自行编//写信号消抖程序.#include <at89x51.h>sbit led="0xB1";//有一只LED接在了RXD 引脚上,用来指示正反转;main(){EA=1; //总中断允许EX0=1; //外部中断0允许IT0=1; //外部中断0为边沿触发方式while(1);;}/*********************编码器中断函数入口:无出口:无*********************/void encoder(void) interrupt 0 { //外部中断0if (INT1){led=1;}else{led=0;}}whimsy 地AVR 程序//外部中断0,用于编码开关解码,解码图: A 接中断脚(AVR 地PD2),以此为基准,B 用来判断方向(连到AVR 地PA1), C 接地//A -|// | -----|__________|----------|____________//C -|////B -|// | ----------|__________|----------|____________//C -|// CW ===>>> ROTATION//外部中断设置(ISC01=0,ISC00=1): INT0 引脚上任意地逻辑电平变化都将引发中断#pragma interrupt_handler int0_isr:2void int0_isr(void){//external interupt on INT0GICR=0; //禁止外部中断if ((PIND & 0x04)==0) //先判断是高电平产生地中断还是低点平地中断if ((PINA & 0x02)==0) //再判断B 线上地电平{keycounter--;keydirection="0";}个人收集整理资料,仅供交流学习,勿作商业用途else{keycounter++;keydirection="1";}elseif ((PINA & 0x02)==0){keycounter++;keydirection="1";}else{keycounter--;keydirection=0;}GICR=0x40;}。
海德汉_旋转编码器说明书
旋转编码器2012年11月带安装式定子联轴器的旋转编码器分离式联轴器的旋转编码器本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
海德汉公司的旋转编码器是测量旋转运动、角速度的传感器,也可与机械测量设备一起使用,例如丝杠,测量直线运动。
应用领域包括电机、机床、印刷机、木工机器、纺织机器、机器人和运送设备以及各种测量,测试和检验设备。
高质量正弦增量信号可进行高倍率细分,用于数字速度控制。
电子手轮2目录选型指南标准用途的旋转编码器供电电源3.6至5.25 V DC2) 内部2倍频细分后最大至10 000个信号周期数3) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)42634 ERN 480000至5 000线405选型指南标准用途的旋转编码器内部2倍频细分后最大周期数为10 0002) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)642 50 54 7选型指南电机旋转编码器内部2倍频细分后8 192个信号周期2) 内部5/10/20/25倍频细分后37 500个信号周期8参见产品信息910供电电源3.6至5.25 V DC2)内部2倍频细分后最大至10 000个信号周期数3)内部2倍频细分后8 192个信号周期4)根据用户要求,可提供盲孔轴版选型指南特殊用途的旋转编码器40请见产品概要:应用于电梯行业的旋转编码器请见产品概要:11测量原理测量基准测量方法海德汉公司的光学扫描型光栅尺或编码器的测量基准都是周期刻线-光栅。
这些光栅刻在玻璃或钢材基体上。
这些精密光栅通过多种光刻工艺制造。
光栅的制造方式有:•在玻璃上镀硬铬线•在镀金钢带上蚀刻线条,或者•在玻璃或钢材基体上蚀刻三维结构图案。
海德汉公司开发的光刻工艺生产的栅距典型值为50 µm至4 µm。
4旋转编码器定位操作训练
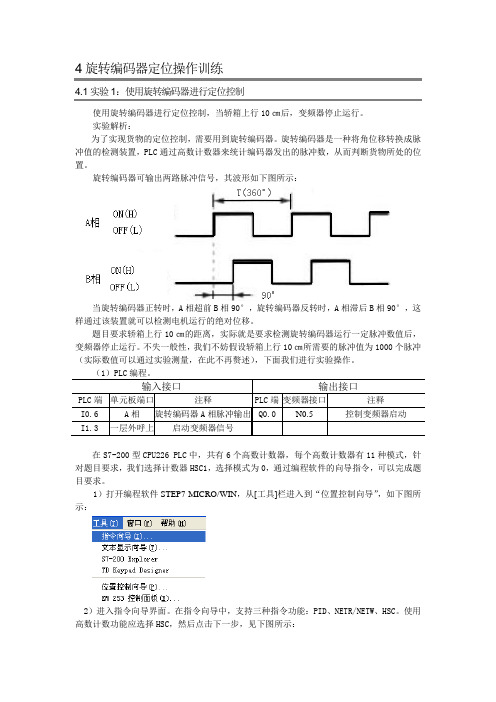
4旋转编码器定位操作训练4.1实验1:使用旋转编码器进行定位控制使用旋转编码器进行定位控制,当轿箱上行10㎝后,变频器停止运行。
实验解析:为了实现货物的定位控制,需要用到旋转编码器。
旋转编码器是一种将角位移转换成脉冲值的检测装置,PLC通过高数计数器来统计编码器发出的脉冲数,从而判断货物所处的位置。
旋转编码器可输出两路脉冲信号,其波形如下图所示:当旋转编码器正转时,A相超前B相90°,旋转编码器反转时,A相滞后B相90°,这样通过该装置就可以检测电机运行的绝对位移。
题目要求轿箱上行10㎝的距离,实际就是要求检测旋转编码器运行一定脉冲数值后,变频器停止运行。
不失一般性,我们不妨假设轿箱上行10㎝所需要的脉冲值为1000个脉冲(实际数值可以通过实验测量,在此不再赘述),下面我们进行实验操作。
在S7-200型CPU226 PLC中,共有6个高数计数器,每个高数计数器有11种模式,针对题目要求,我们选择计数器HSC1,选择模式为0,通过编程软件的向导指令,可以完成题目要求。
1)打开编程软件STEP7-MICRO/WIN,从[工具]栏进入到“位置控制向导”,如下图所示:2)进入指令向导界面。
在指令向导中,支持三种指令功能:PID、NETR/NETW、HSC。
使用高数计数功能应选择HSC,然后点击下一步,见下图所示:3)配置高数计数器。
从HC0~HC5中选择一个高数计数器。
选择不同的高数计数器所使用的外部输入信号不同。
针对此题目要求,我们选择HC1,输入点为I0.6、I0.7、I1.0。
每个高数计数器最多有11种工作模式,选择模式1,控制方式为带有内部方向控制的单相/减计数器,没有启动输入,带有复位输入信号。
结合选择的高数计数器HSC1,则输入点I0.6为脉冲时钟输入端口。
设置见下图所示,完成后点击下一步。
4)初始化HC1。
在初始化选项中,需要给子程序命名,系统默认名称为HSC_INIT;设定高数计数器的预置值(PV)为1000,计数器的当前值为0,计数器的初始计数方向为增,具体设置参见下图所示:5)设置HC0的中断事件,当高数计数器的预置值与计数器当前值相等时,产生中断事件。
旋转编码器使用方法
旋转编码器使用方法
旋转编码器使用方法
使用方法一:修改驱动程序
旋转编码器属于精密仪器,在其使用过程中需通过程序发出指令,才能起到特定的作用,而根据不同环境下的需求,需要设定不同的驱动程序,所以说决定编码器使用效果怎幺样,修改合适的驱动程序是非常重要的。
通常情况下只要直接修改reg文件,同时注册一个表文件,利用添加的方式改写动态链接,在确定动态链接已经修改好的情况下,需要将其添加到内核中;
使用方法二:硬件接口连接
驱动程序修改好之后,下面就是硬件接口连接操作,在连接中,通常有A和B两个集电极输出接口,为确保线路衔接性,需要在3.3V上的电阻上进行操作,将A和B两个接口分别插到CPU上。
在硬件接口连接成功之后,以防万一,须做好测试工作检查电压输出端高低压数值是否正确,比如在按下按钮之后,如果P2端口输出值是高电平的话,说明连接正确;
使用方法三:流接口驱动程序的编写。
旋转编码器控制步进电机定位案例
旋转编码器控制步进电机定位案例旋转编码器是一种能够将机械旋转运动转换成数字信号的传感器,它在许多自动控制系统中起着至关重要的作用。
步进电机则是一种将数字脉冲信号转换成机械运动的精密执行装置。
那么,我们来探讨一下旋转编码器控制步进电机定位的实际案例。
1. 硬件部分在这个案例中,我们需要准备一个步进电机和一个旋转编码器。
步进电机通过控制器接收数字脉冲信号,进而转动一定的角度。
而旋转编码器则可以监测步进电机转动的位置和方向。
这两者配合使用,可以实现精确的定位控制。
2. 软件部分除了硬件组成部分外,我们还需要编写控制程序来实现旋转编码器对步进电机的定位控制。
通过事先设定目标位置,并结合旋转编码器的反馈信息,控制程序可以实时地调整步进电机的运动状态,以达到精准的定位要求。
3. 实际应用在工业自动化设备中,旋转编码器控制步进电机的定位应用十分广泛。
在自动装配线上,需要对零部件进行精准的定位和装配;在数控机床上,需要对工件进行精密加工;在医疗设备中,需要对影像设备进行准确的定位等等。
这些都需要旋转编码器控制步进电机来实现。
4. 个人观点旋转编码器控制步进电机定位在工业自动化领域的应用非常广泛,而且随着技术的发展和创新,其应用范围还会不断扩大。
对于我来说,这个案例让我更深入地了解了数字控制系统在工业生产中的重要性,也让我对自动化控制技术有了更深层次的理解。
结语通过本案例的分析,我们了解了旋转编码器控制步进电机定位的原理和应用,同时也体会到了这种技术在工业自动化中的重要性和广泛性。
希望通过本文的共享,能够让更多的人对这一领域有所了解,也期待在未来能够看到更多基于旋转编码器控制步进电机的精准定位应用案例。
旋转编码器控制步进电机定位技术的发展和应用在工业自动化领域,旋转编码器控制步进电机的定位技术一直在不断发展和完善。
随着数字控制技术的不断进步,旋转编码器控制步进电机的应用范围也在逐渐扩大。
下面我们将进一步探讨这一技术的发展和应用情况。
CANopen旋转编码器使用说明书----上海德晶

CANopen旋转编码器使用说明书----上海德晶内容提要1.注意事项2.标识3.安装4.电气连接5.CANopen 接口6.参数设置7.附件1 注意事项电气安装时应注意以下几个方面:-编码器尽可能地靠近控制单元安装。
-尽可能的使用有屏蔽的双绞线。
-避免信号线靠近高压电缆(例如驱动电缆等)。
-如果需要可以对编码器电源安装EMC 滤波器。
-避免编码器安装在容性性噪声源或开关电源附近。
连接请参考第4 章: "电气连接"。
2 标识设备信息可以通过产品标签上的型号,产品序列号获知。
3 安装。
4 电气连接4.1 CANopen 接线定义连。
4.2 总线终端当编码器为CAN 网络上的最后一个设备时,需要将终端电阻Rt 拨码开关 拨到“ON ”状态。
或感安装时请确保编码器的防护等级符合要求。
避免敲打、撞击、腐蚀编码器4.3 波特率设置:DIP A波特率既可以通过硬件模式设置,也可以通过软件模式设置。
如果DIP A 第4位=OFF 则比特率由对象字典的3000h 来定义,可以通过SDO 报 文进行修改。
如果DIP A 第4 位=ON ,则比特率可由拨码开关 DIP A 进行设置。
由拨码开关设置波特率时,请先关闭掉设备。
波特率可由拨码开关的二进 制状态进行表示(ON 代表1,OFF 代表0)。
拨码开关与波特率对照表例如:设置波特率为250 Kbit/s ,查表可知拨码开关的编码为100,第4位设为ON 。
设置波特率为500 Kbit/s ,查表可知拨码开关的编码为101,第4位设为ON 。
位202122ON/OFF1234位12342012ON FF22/O FF O ONON1234位20122 2ONFFO ONONFF O4.4 节点号设置拨码开关:DIP B编码器的节点号,既可以通过硬件模式设置,也可以由软件模式进行设置,范围 1 至127 之间节点号由数据01h 文进行修改。
如果DIP B 则节点号由DIP B 来定义。
OMRON编码器说明书
ᡔᴃᣛफ
ᡔᴃ㆛
᪡㆛
Ⳍֵ݇ᙃ
绝对代码表
10
进
二进制
制
格雷
BCD
格雷
余留
14符号
10
1
0
0 0 0 0 0 00 0 0 0 0
1361
ᡔᴃ㆛ᮟ䕀ᓣ㓪ⷕ఼
中空轴型 (空心轴型)
旋转轴为中空轴形状,通过将驱动侧的轴直接与中空孔 连接,可节省轴方向的空间。 以板簧为缓冲,吸收驱动轴的振动等
金属盘
编码器的旋转板 (盘)是用金属制成的,与玻璃旋转板 (盘)相比,更强化了耐冲击性。但受到狭缝加工的制 约,不能应用于高分辨率。
伺服装置
1359
ᡔᴃ㆛ᮟ䕀ᓣ㓪ⷕ఼
术语解说
分辨率
轴旋转1次时输出的增量信号脉冲数或绝对值的绝对位 置数。
输出相
增量型式的输出信号数。包括1相型(A相)、2相型(A 相、 B相)、 3相 (A相、 B相、 Z相)。 Z相输出1次即输 出1次原点用的信号。
输出相位差
轴旋转时,将A相、B相各信号相互间上升或下降中的时 间偏移量与信号1周期时间的比,或者用电气角表示信 号1周期为360°。 A相、 B相用电气角表示为90°的相位差。
多旋转 绝对型
E6C-N
ᡔᴃᣛफ
ᡔᴃ㆛
᪡㆛ 绝对型
Ⳍֵ݇ᙃ
E6CP-A E6C3-A E6F-A E6J-A
⬉ܝӴᛳ఼
ԡ鼠Ӵᛳ఼
⌟䭓Ӵᛳ఼
㾚㾝Ӵᛳ఼ ᅝܼऎඳ
hw040旋转编码器用法

hw040旋转编码器用法"旋转编码器用法"旋转编码器是一种常见的输入设备,通常用于测量和控制旋转运动。
它们在各种应用中被广泛使用,例如机械加工、仪器仪表、电子设备等。
在本文中,我们将深入探讨旋转编码器的用法,并逐步解释其工作原理和应用。
第一步:了解旋转编码器的工作原理旋转编码器由一个内部光学或磁性传感器和一个外部编码盘组成。
当旋转编码器旋转时,传感器会检测到编码盘上的标记,然后生成相应的电信号。
这些电信号被传输到计算机或控制系统,以测量旋转角度或控制旋转运动。
第二步:了解旋转编码器的类型旋转编码器通常分为两种类型:绝对编码器和增量编码器。
绝对编码器可以精确测量旋转角度,并提供每个位置的唯一标识,不需要初始化过程即可获取准确的位置信息。
而增量编码器,则通过测量脉冲数来计算旋转角度,需要一个参考点进行初始化。
第三步:掌握绝对编码器的用法绝对编码器通常用于需要精确测量和控制旋转位置的应用。
例如,机床上的数控系统使用绝对编码器来确保准确的刀具定位和运动控制。
此外,绝对编码器还广泛应用于机器人、航空航天、医疗设备等领域。
使用绝对编码器的关键是正确解读编码盘上的标记并将其与位置进行关联。
第四步:学习增量编码器的用法增量编码器通常用于需要测量转速和位置变化的应用。
增量编码器通过测量两个或多个输出信号之间的脉冲数来计算旋转角度和速度。
它们可以提供非常高的分辨率和精确性,并且通常用于自动化设备、数码相机、汽车控制系统等领域。
使用增量编码器的关键是在初始化过程中正确设置参考点以及解读和计数脉冲。
第五步:了解旋转编码器的接口和连接方式旋转编码器通常通过数字或模拟接口与计算机、控制系统或其他设备连接。
数字接口如RS-422和RS-485可提供更高的速度和抗干扰性能,而模拟接口如模拟电压或电流可提供更简单的连接和使用。
选择适当的接口和连接方式是确保旋转编码器正常工作的关键。
第六步:了解旋转编码器的附加功能除了基本的测量和控制功能外,一些旋转编码器还具有附加功能,如防尘、防水、抗震、抗干扰等。
台達旋轉式編碼器使用說明说明书
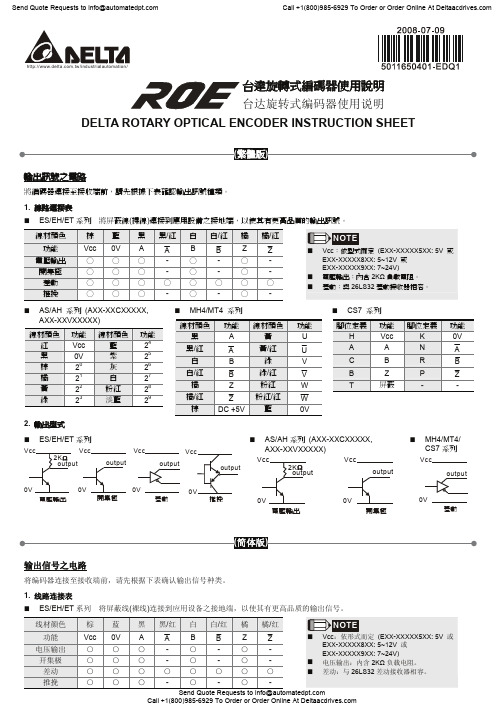
台達旋轉式編碼器使用說明台达旋转式编码器使用说明DELTA ROTARY OPTICAL ENCODER INSTRUCTION SHEET(繁體版)輸出訊號之電路將編碼器連接至接收端前,請先根據下表確認輸出訊號種類。
1.線路連接表ES/EH/ET 系列 將屏蔽線(裸線)連接到應用設備之接地端,以使其有更高品質的輸出訊號。
AS/AH 系列 (AXX-XXCXXXXX,AXX-XXVXXXXX)線材顏色功能線材顏色功能紅Vcc 藍24黑0V 紫25棕20灰26橘21白27黃22粉紅28綠23淡藍29MH4/MT4 系列CS7 系列2.輸出型式ES/EH/ET 系列Vcc0VoutputVcc0V0VVccoutput電壓輸出開集極差動推挽AS/AH 系列 (AXX-XXCXXXXX,AXX-XXVXXXXX)Vcc0Voutput電壓輸出開集極MH4/MT4/CS7系列Vcc0V差動(简体版)输出信号之电路将编码器连接至接收端前,请先根据下表确认输出信号种类。
1.线路连接表ES/EH/ET 系列 将屏蔽线(裸线)连接到应用设备之接地端,以使其有更高品质的输出信号。
AS/AH 系列 (AXX-XXCXXXXX,AXX-XXVXXXXX) 线材颜色 功能 线材颜色 功能红 Vcc 蓝 24 黑 0V 紫25 棕 20灰 26 橘 21白 27 黄 22粉红 28 绿 23淡蓝 29MH4/MT4 系列CS7 系列2. 输出形式 ES/EH/ET 系列Vcc0VoutputVcc0V0VVccoutput電壓輸出開集極差動推挽AS/AH 系列 (AXX-XXCXXXXX,AXX-XXVXXXXX)Vcc0Voutput電壓輸出開集極MH4/MT4/CS7系列Vcc0V差動(English Version)CIRCUIT OF OUTPUT SIGNALSBefore connecting the encoder wirings to the receiver, please identify the type of the output signal with the specification. 1. Connection Table ES/EH/ET SeriesConnect the shield wire (bare wire) with the grounding end of equipment for better performance.AS/AH Series (AXX-XXCXXXXX,AXX-XXVXXXXX) Wire ColorFunctionWire ColorFunction Red Vcc Blue 24Black 0V Purple 25 Brown 20Gray 26 Orange 21 White 27 Yellow 22 Pink28Green 23Light Blue29MH4/MT4 SeriesCS7 Series2. Output Circuit ES/EH/ET SeriesVcc0V outputVcc0V 0VVccoutputVoltage OutputOpen-Collector Line Driver Push-PullAS/AH Series (AXX-XXCXXXXX,AXX-XXVXXXXX)Vcc0VoutputVoltage OutputOpen-CollectorMH4/MT4/CS7SeriesVcc0VLine Driver***************************************。
ec11旋转编码器的使用方法 -回复

ec11旋转编码器的使用方法-回复旋转编码器是一种常见的电子设备,用于测量和控制旋转运动。
在各种应用中,例如机器人控制、医疗设备、工业自动化等领域,旋转编码器广泛应用。
本文将介绍EC11旋转编码器的使用方法,并以步骤的形式详细说明如何正确使用该编码器。
二、了解EC11旋转编码器的基本知识1. EC11旋转编码器是一种增量式编码器,它可以测量旋转运动的位置和变化。
2. EC11旋转编码器包括一个旋转轴和一个固定部分,旋转轴上有一个刻度盘和一个编码器头。
3. EC11旋转编码器的刻度盘上刻有等距的刻度,编码器头通过感应刻度盘上的光学信号,测量旋转角度和方向。
三、EC11旋转编码器的安装1. 确定EC11旋转编码器的安装位置,通常安装在旋转设备的旋钮或轴上。
2. 将编码器头与刻度盘对齐,并将编码器头固定在旋转轴上。
3. 确保编码器安装牢固,并能够自由转动,避免与其他部件摩擦。
四、EC11旋转编码器的接线1. 查找EC11旋转编码器的连接引脚,通常有三个引脚,分别为VCC、GND和输出信号。
2. 将VCC引脚连接到正极电源,将GND引脚连接到负极电源,以提供编码器的电源供应。
3. 将输出信号引脚连接到微控制器或其他接收信号的设备。
五、EC11旋转编码器的使用1. 初始化变量。
在使用EC11旋转编码器之前,需要初始化一个变量来存储编码器的旋转角度或位置。
2. 读取编码器信号。
通过读取EC11旋转编码器的输出信号,可以得到编码器的旋转方向和变化情况。
3. 更新变量。
根据编码器的输出信号,更新之前初始化的变量,以反映编码器的旋转角度或位置的变化。
4. 应用变量。
使用更新后的变量控制相应的设备或系统,例如控制机器人的运动轨迹或调整医疗设备的参数。
六、EC11旋转编码器的注意事项1. 在接线过程中,确保正确连接电源和接收信号的引脚,避免损坏设备。
2. 在安装编码器时,注意避免与其他部件产生摩擦或干扰,以确保编码器的正常运行。
布瑞特单圈绝对值旋转编码器 RS485 用户手册说明书

布瑞特单圈绝对值旋转编码器RS485产品说明书深圳布瑞特科技有限公司ShenZhen Briter Technology Co.Ltd产品优势特性●RS485数字通讯信号输出,数字输出信号既有多圈值、单圈绝对值;●采用标准的ModBus-RTU通讯规约,支持组态王、Intouch、FIX、synall 等流行软件,能与AB、西门子、施耐德、GE等国际著名品牌的设备及系统之间实现数据通信;●单圈编码器在不掉电情况下可作电子多圈编码器使用(此功能非断电记忆),最高可达百万圈;增加返回速度功能,便于使用者计算;●单圈量程范围内任何位置都是唯一的,即使有干扰或断电运动,都不会丢失位置信息;●单圈分辨率有1024(10bit)、4096(12bit)、16384(14bit)、32768(15 bit),量程范围内最高可实现0.01度的分辨率;●所有参数均可通过电脑的RS485通讯进行设定,可在任意位置设定零点,因此安装编码器时可将设备停留任意位置,无需考虑本编码器的旋转位置、即可固定好连接轴,通电后只要在外部引线处或通过RS485通讯进行一次置零操作即可自动修正;●特别适用于塔式起重机、矿山起重机、施工升降机、机床、3D打印机、自动化流水线、工业机器人、印刷机械、包装机械、物流机械、移动广告屏幕滑轨等设备的高度、行程、角度及速度的可靠/精确测量。
产品型号说明型号:RS485接口--3D 模型以及相关资料请到布瑞特科技官网下载。
尺寸型号图1:输出6mm IP54尺寸型号图2:输出轴8mm IP54机械尺寸线出口方向与3个M3安装孔的角度关系是随机的D 字型轴尺寸比例5:1螺纹孔深6mm尺寸型号图3:盲孔8mm IP54尺寸型号图4:输出6mm IP67尺寸型号图5:输出8mm IP67注意事项●编码器属于精密仪器,请轻拿轻放、小心使用,尤其对编码器轴请勿敲、撞击及硬拽等。
●编码器与机械连接应选用柔性连接器或弹性支架,应避免刚性联接不同心造成的硬性损坏。
ec11旋转编码器的使用方法 -回复

ec11旋转编码器的使用方法-回复EC11旋转编码器是一种常用的输入设备,广泛应用于控制系统、机器人、机械设备等各个领域。
本文将一步一步地介绍EC11旋转编码器的使用方法。
第一步:了解EC11旋转编码器的基本结构和工作原理EC11旋转编码器由旋转轴、编码盘、编码刻线、感应器等部件组成。
当旋转编码器被旋转时,编码盘上的刻线与感应器之间的接触触发感应器产生脉冲信号,然后通过信号处理电路将脉冲信号转换为数字或模拟信号。
EC11旋转编码器通常具有两个输出信号通道(A相和B相),能够实现正转和反转的测量。
第二步:连接EC11旋转编码器将编码器的引脚与控制器或其他设备进行连接。
EC11旋转编码器通常具有5个引脚,分别是Vcc(电源正极)、GND(地线)、A相、B相和SW (按键)。
首先,将Vcc引脚连接到正常工作电压(通常是5V或3.3V),将GND引脚连接到地线。
然后,根据需求将A相和B相引脚连接到控制器或其他接收设备的输入引脚上。
最后,如果需要使用旋转编码器上的按键功能,可以将SW引脚接到相应的输入引脚上。
第三步:编程设置EC11旋转编码器在使用EC11旋转编码器之前,通常需要对其进行编程设置以适应具体的应用场景。
编程方法可能会因控制器或开发平台的不同而有所差异,下面以Arduino为例进行说明。
1. 引用编码器库:打开Arduino IDE,在菜单栏中选择“工具”,然后选择“管理库”。
在弹出的对话框中搜索“encoder”,找到与旋转编码器兼容的库(如“Encoder”库),点击“安装”。
2. 创建编码器对象:在Arduino代码中,通过使用库提供的函数和类来创建旋转编码器对象。
首先,在代码开头部分添加`#include<Encoder.h>`,然后在`setup()`函数中添加`Encoder myEncoder(A相引脚, B相引脚)`,用于创建编码器对象。
A相引脚和B相引脚的引脚号应填入实际连接的引脚号。
编码器使用说明书
1.※有网友问:增量旋转编码器选型有哪些注意事项?应注意三方面的参数:1.械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。
2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。
3.电气接口,编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。
其输出方式应和其控制系统的接口电路相匹配。
2.※有网友问:请教如何使用增量编码器?1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。
2,增量型编码器通常有三路信号输出(差分有六路信号):A,B和Z,一般采用TTL电平,A脉冲在前,B脉冲在后,A,B脉冲相差90度,每圈发出一个Z脉冲,可作为参考机械零位。
一般利用A超前B或B超前A进行判向,我公司增量型编码器定义为轴端看编码器顺时针旋转为正转,A超前B为90°,反之逆时针旋转为反转B超前A为90°。
也有不相同的,要看产品说明。
3,使用PLC采集数据,可选用高速计数模块;使用工控机采集数据,可选用高速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。
4,建议B脉冲做顺向(前向)脉冲,A脉冲做逆向(后向)脉冲,Z原点零位脉冲。
5,在电子装置中设立计数栈。
3.※关于户外使用或恶劣环境下使用有网友来email问,他的设备在野外使用,现场环境脏,而且怕撞坏编码器。
我公司有铝合金(特殊要求可做不锈钢材质)密封保护外壳,双重轴承重载型编码器,放在户外不怕脏,钢厂、重型设备里都可以用。
不过如果编码器安装部分有空间,我还是建议在编码器外部再加装一防护壳,以加强对其进行保护,必竟编码器属精密元件,一台编码器和一个防护壳的价值比较还是有一定差距的。
4.※从接近开关、光电开关到旋转编码器:工业控制中的定位,接近开关、光电开关的应用已经相当成熟了,而且很好用。
旋转编码器 QY3506-CDZ5C 用户手册说明书

旋转编码器旋转编码器是测量旋转运动、角速度的传感器,也可与机械测量设备一起使用,例如丝杠,测量直线运动。
应用领域包括电机、机床、印刷机、木工机器、纺织机器、机器人和运送设备以及各种测量,测试和检验设备。
产品说明概要编码器采用的是磁电技术。
由两个TMR电桥构成。
当磁场旋转电桥输出四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
信号经过芯片处理后,输出标准的ENC信号。
产品特点电压驱动输出3.3V / 5 V 电源8 mA低功耗回路保护,高精度抗震、抗粉尘、抗冲击,不丢脉冲A,B,Z三相输出应用范围智能车、电动车数控机床工业机器人伺服电机包装、纺织机械传送带技术参数额定值/性能* 请订购时选择接口*:电压输出线数*:64/ 256 /1024 / 4096电气连接:15 cm电缆,带或不带连接器供电电压:3.3V / 5 V空载时的电流消耗:8 mA轴径:3 mm机械允许转速:10000 rpm响应频率:128KHz启动扭矩::0.001 Nm(20 °C时)转子转动惯量::0.5·10–7 kgm2被测轴允许的轴向窜动:±0.5 mm最高工作温度:120 °C最低工作温度:-40 °C防护等级:EN 60 529 IP64重量:≈0.011 kg接线方式:请按下述方法接线。
引脚Pin 1 Pin 2 Pin 3 Pin 4 Pin 5 Pin 6信号地Vcc A相B相/DIR Z相NC输出方式:正交A/B 输出(正交A/B 模式)通道A 与通道B 之间的相移指示了磁铁运动的方向。
磁铁顺时针(俯视)旋转时,通道A 超前通道B 角度90°,逆时针方向旋转时,通道B 的相位超前于通道A 90°相位。
矿业旋转编码器使用说明书

BQB24ZD跑车防护装置用隔爆型旋转编码器使用说明书目录1 用途 (3)2 环境条件 (3)3 主要技术参数 (3)4 产品分类 (3)4.1 型式 (3)4.2 产品型号 (3)5 产品结构及原理 (4)5.1 产品结构及外形尺寸 (4)5.2 电气原理 (4)6 安装、调试、操作及使用注意事项 (4)6.1 安装 (4)6.2 配接设备 (4)6.3 用户接线 (5)6.4 注意事项 (5)7 运输和储存 (5)8 订货和服务 (6)附录A ....................................................................... 错误!未定义书签。
使用旋转编码器前,请详细阅读本说明书。
1 用途BQB24ZD跑车防护装置用隔爆型旋转编码器(以下简称编码器)主要用于测量煤矿井下提升机转速及提升机与矿车之间的位移(或距离)关系。
旋转编码器选用集光、机、电技术于一体的数字化传感器,输出计数脉冲,可与多种PLC 进行连接换算。
编码器执行标准GB3836-2000、Q/ZMD021-2010。
2 环境条件——温度: 0℃~40℃;——平均相对湿度: ≤95%RH(+25℃);——大气压力: 80kPa~106kPa;——机械环境: 无显著振动和冲击的场合;——适用于有瓦斯和煤尘爆炸的危险环境中;——周围介质无腐蚀性气体。
3 主要技术参数供电电压:DC24V供电电流:350 mA4 产品分类4.1 型式矿用隔爆型“Exd I”。
4.2 产品型号B Q B 24 ZD跑车防护装置额定工作电压,V隔爆型保护设备:编码器5 产品结构及原理5.1 产品结构及外形尺寸编码器主要由进口旋转编码器、外壳两部分组成,其外部结构如图1所示。
图1外部结构及尺寸图5.2 电气原理5.2.1电气原理绝对编码器光码盘上有许多道刻线,每道刻线依次以2线、4线、8线、16线。
编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。
旋转编码器使用说明

编码器:
应用
旋转编码器是用来测量数据的,当编码器旋转式通过电子拦截获得数据,然后管理员传到下一运输注意
不要丢下旋转编码器和避免摇晃。
编码器包括光学系统并运用光学原理。
用原始包装,运用不正当的包装,可能导致编码器毁坏。
存储
存储温度:-30到80保持干燥
安装说明
安装编码器时,避免安装轴时发生摇晃,固定的光学圆盘碰到轴时可能毁坏
不要打开旋转编码器
据菲权威统计,打开或关闭编码器可能导致短路,缸的导线可能剪断,进入的灰尘可能毁坏光不要做任何机械上的更改在编码器上,安全的功能与机械部分更改将不担保
电子试运行
试运行和操作需要专业的人员,
不要做点路上的更改在编码器上,
穿接插头需要必须实实在在的连接。
错误的连接可能导致故障,
管理员传到下一步
进入的灰尘可能毁坏光学系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
充注小车、运载小车定位使用说明
定位原理:
旋转编码器定位与老式的旋转变压器一样,实际上是一个计数器。
我们目前使用的OMRON旋转编码器每旋转一周,能精确地发出1024脉冲,PLC依据旋转编码器发出的脉冲进行计数,再乖以固定机械变比与旋转半径的系数,就可以得出脉冲与实际行走距离的线性对应关系。
PLC利用高速计数模块QD62D读取旋转编码器的值并进行数字化处理,可以将脉冲数值转换成实际的距离值如mm。
目前我们设备都是利用旋转编码器的原始值进行处理的,所有触模屏上的距离值均为脉冲值而非实际距离值,这样在处理数据时比较方便直观。
根据这一对应关系利用普通变频器控制一般的三相鼠笼电机就能实现精度在1毫米左右定位系统,可以在许多定位要求不高的控制领域使用。
使用方法:
依据上述原理,定位系统定位首先必须选择一个参考点,以这点作为基准点,其它所有设置点均为到这一点的相对距离。
当基点信号取的不稳定或不好,就会影响整个定位过程。
旋转编码器由一个联轴器与一套齿轮机构组合成一套测量机构。
由于齿轮与齿轮之间存在间隙,运行一段时间后就会有误差积累,造成定位不准,这时不要改变屏上设定数据,而是在运行机构运行一段时间后,让运行机构回到基点,进行一次清零,就可以消除积累误差。
旋转编码器定位机构的故障主要有定位不准、或运行数据无变化等等。
定位不准主要是由测量机构之间的间隙,联轴器、齿轮相对打滑。
一种定位不准就是干扰,现场已采用了一端接地的屏蔽等措施。
出错时请严格检查测量线路(包抱QD62D联接器)有无断线、短路、屏蔽不严、模块供电电压不足等问题。
还有一种定位不准表现在:由于测量机构所能测量的最大频率不超过500KHz,因此对于变化速度太快脉冲系统不能及时测量,造成定位不准。
因此系统要运行平稳,不能有速度突变。