北航卡尔曼滤波实验报告_GPS静动态滤波实验
卡尔曼滤波验证试验报告
卡尔曼滤波验证试验报告一、状态空间模型111---++=k k k k w Bu Ax xkk k k v Z Hx y ++=其中:A 是状态转移矩阵;B 是控制输入量增益矩阵;uk-1是控制输入量;wk-1是状态转移噪声,p(w) ~ N(0,Q);yk 是观测量;H 是观测矩阵;Zk 是系统误差项;vk 表示M 维观测噪声,p(v) ~ N(0,R) ; 二、演示验证由于实际应用中,A 、H 矩阵比较复杂,为了简化验证难度,取k x 为直流信号,即使得A 、H 都为1;k k v w 、为高斯白噪声,方差为Q 、R ;k k z u 、为零。
所以,有上述假设条件可得:状态空间模型:时间更新方程: 1ˆˆ-='k k x xQ P P k k +='-111--+=k k k w x x k k k v x y +=()R N v k ,0~()Q N w k ,0~1-状态更新方程:()k k k k k x y K x x '-+'=ˆˆˆ()1-+''=R P P K k k k()kk k P K I P '-= (1)P'k 越小,Kk 越小,先验估计精度高,估计值应当更加信任先验估计量,如图1所示。
图1 先验权重更大 (2)R 越小,Kk 越大,观测精度高,估计值更加信任观测获得的新息,如图2所示。
图2 观测值权重更大三、实验结论(1)观测噪声协方差R越小,新息的增益Kk越大。
特别地,R 趋向于零时,有Kk趋向于H-1。
因此,估计式中新息的权重(增益Kk)越来越大。
(2)另一方面,先验估计误差协方差P/k越小,新息的增益Kk越小。
特别地,P/k趋向于零时,有Kk趋向于0。
因此,估计式中新息的权重(增益Kk)越来越小。
北航惯性导航综合实验五实验报告

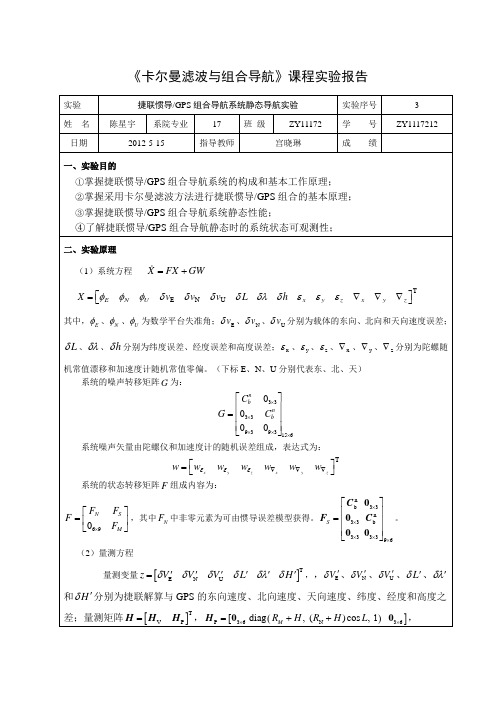
惯性导航技术综合实验实验五惯性基组合导航及应用技术实验惯性/卫星组合导航系统车载实验一、实验目的①掌握捷联惯导/GPS组合导航系统的构成和基本工作原理;②掌握采用卡尔曼滤波方法进行捷联惯导/GPS组合的基本原理;③掌握捷联惯导 /GPS组合导航系统静态性能;④掌握动态情况下捷联惯导 /GPS组合导航系统的性能。
二、实验内容①复习卡尔曼滤波的基本原理(参考《卡尔曼滤波与组合导航原理》第二、五章);②复习捷联惯导/GPS组合导航系统的基本工作原理(参考以光衢编著的《惯性导航原理》第七章);三、实验系统组成①捷联惯导/GPS组合导航实验系统一套;②监控计算机一台。
③差分GPS接收机一套;④实验车一辆;⑤车载大理石平台;⑥车载电源系统。
四、实验内容1)实验准备①将IMU紧固在车载大理石减振平台上,确认IMU的安装基准面紧靠实验平台;②将IMU与导航计算机、导航计算机与车载电源、导航计算机与监控计算机、GPS 接收机与导航计算机、GPS 天线与GPS 接收机、GPS 接收机与GPS 电池之间的连接线正确连接;③ 打开GPS 接收机电源,确认可以接收到4颗以上卫星; ④ 打开电源,启动实验系统。
2) 捷联惯导/GPS 组合导航实验① 进入捷联惯导初始对准状态,记录IMU 的原始输出,注意5分钟内严禁移动实验车和IMU ;② 实验系统经过5分钟初始对准之后,进入导航状态; ③ 移动实验车,按设计实验路线行驶;④ 利用监控计算机中的导航软件进行导航解算,并显示导航结果。
五、 实验结果及分析(一)理论推导捷联惯导短时段(1分钟)位置误差,并用1分钟惯导实验数据验证。
1、一分钟惯导位置误差理论推导:短时段内(t<5min ),忽略地球自转0ie ω=,运动轨迹近似为平面1/0R =,此时的位置误差分析可简化为:(1) 加速度计零偏∇引起的位置误差:210.88022t x δ∇==m (2) 失准角0φ引起的误差:202 0.92182g t x φδ==m (3) 陀螺漂移ε引起的误差:330.01376g t x εδ==m 可得1min 后的位置误差值123 1.8157m x x x x δδδδ=++= 2、一分钟惯导实验数据验证结果:(1)纯惯导解算1min 的位置及位置误差图:lat0.01s 度lon0.01s度北向位移误差0.01sm 东向位移误差0.01sm(2)纯惯导解算1min 的速度及速度误差图:-100-50050Vx0.01s m /s020406080Vy0.01sm /s100020003000400050006000-0.4-0.3-0.2-0.10Vx 误差0.01s m /s100020003000400050006000-0.1-0.0500.050.1Vy 误差0.01sm /s实验结果分析:纯惯导解算短时间内精度很高,1min 的惯导解算的北向最大位移误差,东向最大位移误差,可见实验数据所得位置误差与理论推导的位置误差在同一数量级,结果不完全相同是因为理论推导时做了大量简化,而且实验时视GPS 为真实值也会带来误差;另外,可见1min 内纯惯导解算的东向速度最大误差s ,北向速度最大误差s 。
卡尔曼滤波与组合导航课程实验报告
clear;
clc;
%载入数据
IMU=load('C:\Users\Administrator\Desktop\卡尔曼\IMU.dat');
GPS=load('C:\Users\Administrator\Desktop\卡尔曼\GPS.dat');
%%%%%%%%%%定义常数
e=1/298.3;
else
kesai=kesai_1-pi;
end
end
if Cnb(3,3)==0
if Cnb(1,3)>0
gama=pi/2;
else
gama=-pi/2;
end
elseif Cnb(3,3)>0
gama=gama_1;
else
if Cnb(1,3)>0
gama=gama_1-pi;
else
gama=gama_1+pi;
end
end
%%%%%%%%%%%%存储惯导解算求的的速度、位置和姿态角
velocity(i,:) = [vx,vy,vz];
position(i,:) = [lat/pi*180,long/pi*180,h];
gama=1.78357*pi/180 ; %横滚角
kesai=305.34023*pi/180 ; %航向角
q=[cos(kesai/2)*cos(cita/2)*cos(gama/2)-sin(kesai/2)*sin(cita/2)*sin(gama/2);
cos(kesai/2)*sin(cita/2)*cos(gama/2)-sin(kesai/2)*cos(cita/2)*sin(gama/2);
实验一 GPS静动态滤波实验课件
各种误差源造成的总的位置误差 X (t ) AX (t ) U (t ) W (t )
X x vx a x x y v y a y y z v z a z z
T
分别为载体在x、y、z坐标轴上的位置、速度、加速度分量及位置误差
(3)基于KF的GPS动态定位滤波
1)GPS动态定位数学模型建立 系统方程(续)
输入量:
ay ax az U (t ) 0 0 0 0 0 0 0 0 0 ax ay az
系统噪声:
T
W (t ) 0 0 wax wx 0 0 way wy 0 0 waz wz
接收机监控软件+数据接收存储软件(演示)
实验一 GPS静态/动态滤波实验
应用KF进行GPS定位动态滤波:
需 建 立
系统模型
观测模型
(1)运载体动态模型 (2)随机误差模型
实验一 GPS静态/动态滤波实验
(1)运载体动态模型
常速模型(CV模型) 常加速模型(CA模型)
常用模型
研 究 现 状
“当前”统计模型Βιβλιοθήκη 时间相关模型比较与分析半马尔科夫模型 Noval统计模型
微分多项式模型
实验一 GPS静态/动态滤波实验
(1)运载体动态模型
a)常加速模型(CA模型) 例:一维直线运动,考虑随机干扰情况。 当载体无机动,即匀速 或匀加速直线运动,三 阶常加速CA模型: 运载体 位置、 速度、 加速度 若载体运动表现出变加速 度a(t)特性时,运动模型为:
x 0 1 0 x 0 0 x 0 0 1 x 0 w(t ) 0 a ( t ) x 0 0 0 x 1 高斯白噪声: 1 均值=0、方差= 2
北航卡尔曼滤波实验报告-GPS静动态滤波实验

卡尔曼滤波实验报告2014 年 4 月GPS 静/动态滤波实验一、实验要求1、分别建立GPS 静态及动态卡尔曼滤波模型,编写程序对静态和动态GPS 数据进行Kalman 滤波。
2、对比滤波前后导航轨迹图。
3、画出滤波过程中估计均方差(P 阵对角线元素开根号)的变化趋势。
4、思考:① 简述动态模型与静态模型的区别与联系;② R 阵、Q 阵,P0阵的选取对滤波精度及收敛速度有何影响,取值时应注意什么;③ 本滤波问题是否可以用最小二乘方法解决,如果可以,请阐述最小二乘方法与Kalman 滤波方法的优劣对比。
二、实验原理2.1 GPS 静态滤波选取系统的状态变量为[ ]TL h λ=X ,其中L 为纬度(deg),λ为经度(deg),h 为高度(m)。
设()w t 为零均值高斯白噪声,则系统的状态方程为:310()w t ⨯=+X(1)所以离散化的状态模型为:,111k k k k k W ---=+X X Φ(2)式中,,1k k -Φ为33⨯单位阵,k W 为系统噪声序列。
测量数据包括:纬度静态量测值、经度静态量测值和高度构成31⨯矩阵Z ,量测方程可以表示为:k k k Z HX V =+(3)式中,H 为33⨯单位阵,k V 为量测噪声序列。
系统的状态模型是十分准确的,所以系统模型噪声方差阵可以取得十分小,取Q 阵零矩阵。
系统测量噪声方差阵R 由测量确定,由于位置量测精度为5m ,采用克拉索夫斯基地球椭球模型,长半径e R 为6378245m ,短半径p R 为6356863m 。
所以R 阵为:2225180()005180()0cos()005p e R R L ππ⨯⎛⎫ ⎪⨯ ⎪ ⎪⨯= ⎪⨯⨯ ⎪ ⎪ ⎪⎝⎭R (4)2.2 GPS 动态滤波动态滤波基于当前统计模型,在地球坐标系下解算。
选取系统的状态变量为Tx x x y y y z z z X x v a y v a z v a εεε⎡⎤=⎣⎦,其中,,,x x x x v a ε依次为地球坐标系下x轴上的位置、速度、加速度和位置误差分量,,y z 轴同理。
卡尔曼滤波在GPS中的应用
本科毕业论文 (设计)题目:卡尔曼滤波在GPS定位中的应用学院:自动化工程学院专业:自动化姓名:指导教师:2010年 6月 4日The Application of Kalman Filtering for GPS Positioning摘要本文提出了一种应用卡尔曼滤波的GPS滤波模型。
目前在提高GPS定位精度的自主式方法研究领域,普遍采用卡尔曼滤波算法对GPS定位数据进行处理。
由于定位误差的存在,在GPS动态导航定位中,为提高定位精度,必须对动态定位数据进行滤波处理。
文中在比较分析各种动态模型的基础上,提出了应用卡尔曼滤波的GPS滤波模型,并通过对实测滤波算例仿真,证实了模型的可行性和有效性。
最后提出了卡尔曼滤波在GPS定位滤波应用中的问题和改进思路。
关键词 GPS 卡尔曼滤波定位误差AbstractThis article proposed applies the GPS filter model of the Kalman filtering. At present, to improve GPS positioning accuracy in the autonomous areas of research methods, we commonly use Kalman filter algorithm to process GPS location data.As a result of the position error existence in the GPS dynamic navigation localization, we must carry on filter processing to the dynamic localization data for the enhancement pointing accuracy.In the base of comparing each kind of dynamic model, this article proposed applies the GPS filter model of the Kalman filtering,the actual examples of filter calculation are simulated, it confirmed that the model is feasibility and validity. Finally, this article also proposed the existing problems and improving the idea ofthe applications of Kalman filter in GPS positioning.Keywords GPS Kalman filtering Positioning error目录前言 (1)第1章绪论 (3)1.1GPS的简介及应用 (3)1.2本课题的背景及意义 (5)1.3国内外研究动态及发展趋势 (7)1.4目前GPS定位系统面临着新的困扰和挑战 (5)第2章 GPS全球定位系统及GPS定位误差分析 (8)2.1GPS全球定位系统组成部分 (8)2.1.1 GPS卫星星座 (8)2.1.2 地面支持系统 (9)2.1.3 用户部分 (10)2.2GPS定位原理和测速原理 (16)2.2.1 卫星无源测距定位和伪距测量定位原理 (17)2.2.2 多普勒测量定位原理 (193)2.2.3 GPS测速原理 (214)2.3GPS定位误差分析 (225)2.3.1 星钟误差 (225)2.3.2 星历误差 (225)2.3.3 电离层和对流层的延迟误差 (236)2.3.4 多路径效应引起的误差 (246)2.3.5 接收设备误差 (246)2.3.6 GPS测速误差 (257)第3章卡尔曼滤波理论 (27)3.1卡尔曼滤波理论的工程背景 (27)3.2卡尔曼滤波理论 (28)第4章卡尔曼滤波在GPS定位中的应用 (34)4.1卡尔曼滤波在GPS定位中的应用概述 (34)4.2运动载体的动态模型 (35)4.3卡尔曼滤波模型 (36)4.3.1 状态方程 (36)4.3.2系统的量测方程 (37)4.4滤波仿真和结论 (37)第5章卡尔曼滤波在GPS定位应用中的问题和改进思路 (40)5.1对野值的处理 (40)5.2对状态以及观测噪声方差阵的处理 (41)5.3对观测噪声和测量噪声的处理 (42)结论 (30)谢辞 (31)参考文献 (47)前言自从赫兹证明了麦克斯韦的电磁波辐射理论以后,人们便开始了对无线电导航定位系统研究。
实验报告-卡尔曼滤波
数字信号处理实验报告姓名: 专业: 通信与信息系统 学号: 日期:2015.11实验内容任务一:一连续平稳的随机信号()t x ,自相关函数()tx er -=τ,信号()t x 为加性噪声所干扰,噪声是白噪声,测量值的离散值()k z 为已知,s T s 02.0=,-3.2,-0.8,-14,-16,-17,-18,-3.3,-2.4,-18,-0.3,-0.4,-0.8,-19,-2.0,-1.2,-11,-14,-0.9,-0.8,10,0.2,0.5,-0.5,2.4,-0.5,0.5,-13,0.5,10,-12,0.5,-0.6,-15,-0.7,15,0.5,-0.7,-2.0,-19,-17,-11,-14,自编卡尔曼滤波递推程序,估计信号()t x 的波形。
任务二:设计一维纳滤波器。
(1)产生三组观测数据:首先根据()()()n w n as n s +-=1产生信号()n s ,将其加噪(信噪比分别为20dB ,10dB ,6dB ),得到观测数据() n x 1,() n x 2,() n x 3。
(2)估计() n x i , 1=i ,2,3的AR 模型参数。
假设信号长度为L ,AR 模型阶数为N ,分析实验结果,并讨论改变L ,N 对实验结果的影响。
实验任务一 1. 卡尔曼滤波原理1.1 卡尔曼滤波简介早在20世纪40年代,开始有人用状态变量模型来研究随机过程,到60年代初,由于空间技术的发展,为了解决对非平稳、多输入输出随机序列的估计问题,卡尔曼提出了递推最优估计理论。
它用状态空间法描述系统,由状态方程和量测方程所组成,即知道前一个状态的估计值和最近一个观测数据,采用递推的算法估计当前的状态值。
由于卡尔曼滤波采用递推法,适合于计算机处理,并且可以用来处理多维和非平稳随机信号,现已广泛应用于很多领域,并取得了很好的结果。
卡尔曼滤波一经出现,就受到人们的很大重视,并 在实践中不断丰富和完善,其中一个成功的应用是设计运载体的高精度组合导航系统。
利用卡尔曼滤波快速确定GPS整周模糊度的研究
双差观测量基本消除了接收机时钟误差、大气和星历误差, 理论分析可知双差整周模糊度
具有整数特性, 这就要求模糊度转换不应该改变其特性, 因此, 模糊度转换矩阵中应仅包含整
数元素, 同时还应确保原始空间和白化空间的相互转换。
2. 2 整数类型的白化处理
模糊度转换矩阵中仅包含整数元素的约束, 是保证白化处理过程正确实施的条件之一, 因
本文引入的白化处理过程, 消除或减弱短时间内 GPS 载波双差观测量的相关性, 这不仅 抑制了因 Ka lm an 滤波器递推过程造成舍入误差的传播与积累, 而且提高了 GPS 整周模糊度 解的可靠性, 简化了整数估计的算法。
1 整周模糊度的估计
在已知卫星瞬时位置的情况下, 测相伪距观测方程为:
∆x i
( j - 1) × k ≥ 5 + j 或 k ≥ (5 + j ) ( j - 1)
(5)
当同步观测卫星数目为 4 时, 代入式 (5) 可以得到结论: 观测历元数必须大于或等于 3。 因此,
这里选择 3 个历元的观测数据为一组进行 Ka lm an 滤波, 滤波器的递推过程如下[5]: Xδk k- 1= 5 Xδk- 1
U- 1 Z = U- 1 H X + U- 1 V
或者表示为
Zθ = H{ X + Vθ
由于这种转换是非正交的, 其结果使双差观测量不相关, 得到的观测量协方差矩阵为 R Μγ = E (Vθ VθT ) = E (U - 1VV TU - T ) = U - 1E (VV T )U - T = U - 1RU - T = D (7)
基金项目: 航空基础科学基金资助 (985E3047) 收稿日期: 2001203228 收修改稿日期: 2001- 06- 11
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
卡尔曼滤波实验报告
2014 年 4 月
GPS静/动态滤波实验
一、实验要求
1、分别建立GPS静态及动态卡尔曼滤波模型,编写程序对静态和动态GPS数据进行Kalman滤波。
2、对比滤波前后导航轨迹图。
3、画出滤波过程中估计均方差(P 阵对角线元素开根号)的变化趋势。
4、思考:① 简述动态模型与静态模型的区别与联系;② R 阵、Q 阵,P0阵的选取对滤波精度及收敛速度有何影响,取值时应注意什么;③ 本滤波问题是否可以用最小二乘方法解决,如果可以,请阐述最小二乘方法与Kalman 滤波方法的优劣对比。
二、实验原理
2.1 GPS 静态滤波
(deg)
度(m)
(1)
所以离散化的状态模型为:
(2)
可以表示为:
(3)
矩阵。
5m ,采用克拉索夫斯基地球
6378245m
6356863m
(4)
2.2 GPS 动态滤波
动态滤波基于当前
统计模型,在地球坐标系下解算。
选取系统的状态变量为
(5)
式中,位置误差视为有色噪声,为一阶马尔科夫过程,可表示为:
ε
τεετεετ-=-
=-1
1
(6)
白噪声。
(7)
(8)
系统噪声为:
(9)
量测量为纬度动态量测值、经度动态量测值、高度和三向速度量测值。
由于滤波在地球
坐标系下进行,为了简便首先将纬度、经度和高度转化为三轴位置坐标值,转化方式如下:
(10)
量测方程为:
(11)
综上,离散化的Kalman滤波方程为:
(12)
离散化的系统噪声协方差阵为:
2
[
π
ˆ] ?
k
x
=
+<0
“当前”加速度
(13)
离散化量测噪声协方差阵为:diag
=
R
三、实验结果
3.1 GPS静态滤波
图1 GPS静态滤波前后导航轨迹图和估计误差3.2 GPS动态滤波
图2 GPS动态滤波前后导航轨迹图和估计误差
四、实验讨论
1.简述动态模型与静态模型的区别与联系。
静态模型的速度和加速度均为0,系统静止,状态模型比较准确,模型误差较小,量测信息只有位置信息。
动态模型系统的速度和加速度均发生变化,采用当前统计模型建模,相比之下,系统模型的误差较大,量测信息由位置和速度信息。
静态模型是动态模型在速度和加速度均为0时的特殊情况。
2.R阵、Q阵,P0阵的选取对滤波精度及收敛速度有何影响,取值时应注意什么。
R阵的取值对滤波精度的影响很大,当R取得太大,系统就不能有效的利用量测信息对状态进行修正,因此滤波精度较低;相反,R取得太小,系统过分依赖量测信息,无法利用状态模型有效的去除有害的量测噪声,同样降低滤波的精度。
Q阵的取值对滤波精度的影响也很大:Q取得太大,系统就不能有效的利用状态模型对测量噪声进行修正,因此滤波精度就较低;反之,Q取得太小,系统就会过分的依赖状态模型的精度,以致量测信息无法对状态进行有效的修正,也会降低滤波精度;只有当R和Q的取值恰好与使用的状态模型的精度相吻合时,才能使状态模型和量测信息都能有效的发挥作用,互相补充,得到最高的滤波精度。
P0阵的取值对于可观测性良好的系统,只影响开始的滤波精度,对收敛精度影响不大,但影响收敛速度。
3)本滤波问题是否可以用最小二乘方法解决,如果可以,请阐述最小二乘方法与Kalman 滤波方法的优劣对比。
本滤波问题可以用最小二乘方法解决。
最小二乘方法的最大优点是算法简单,特别是对
一般的最小二乘估计,根本不必知道量测误差的统计信息。
但又存在使用上的局限性,该方法只能估计确定性的常值向量,而无法估计随机向量的时间过程;最小二乘的最优指标只保证了量测的误差平方和最小,而并未确保被估计量的估计误差达到最佳,因此该方法的估计精度不高。
而卡尔曼滤波是一种线性最小方差估计,其算法是递推的,且使用状态空间法在时域设计滤波器,适用于多维随机过程的估计;卡尔曼滤波的估计量可以是平稳的,也可以是非平稳的;卡尔曼滤波具有连续型和离散型两类算法,离散型算法可直接在数字计算机上实现。