工业机器人工作站共35页
合集下载
工业机器人工作站

工业机器人工作站
工业机器人工作站是指专门为工业机器人设计的工作环境,旨在提高工业机器
人的工作效率和安全性。
工业机器人工作站通常包括工作台、安全围栏、安全感知系统、自动化控制系统等组成部分。
首先,工作台是工业机器人工作站的核心部分,它提供了一个稳定的工作平台,用于支撑工业机器人进行各种操作。
工作台通常采用优质的材料制成,具有足够的承重能力和稳定性,以确保工业机器人在进行高速运动时不会产生晃动或倾斜。
其次,安全围栏是工业机器人工作站的重要组成部分,它用于限制工业机器人
的活动范围,避免机器人与人员或其他设备发生碰撞。
安全围栏通常采用坚固耐用的材料制成,具有一定的高度和密度,以确保工业机器人在运行过程中不会逾越围栏,保障工作人员的安全。
此外,安全感知系统是工业机器人工作站的关键部分,它通过使用各种传感器
和监控设备,实时监测工业机器人的运动状态和周围环境,及时发现潜在的安全隐患并采取相应的措施。
安全感知系统可以对工业机器人进行定位、跟踪和监控,确保其在工作过程中不会对人员或设备造成伤害。
最后,自动化控制系统是工业机器人工作站的智能核心,它通过使用先进的控
制算法和技术,对工业机器人进行精准的控制和调度,实现自动化生产和操作。
自动化控制系统可以根据工业机器人的工作任务和环境条件,实时调整机器人的运动轨迹和动作方式,提高工作效率和精度。
总的来说,工业机器人工作站是工业生产中不可或缺的重要设备,它为工业机
器人提供了一个安全、稳定和智能化的工作环境,帮助工业机器人发挥最大的作用,实现自动化生产和智能制造。
随着科技的不断进步,工业机器人工作站将会越来越智能化和高效化,为工业生产带来更多的便利和效益。
工业机器人离线编程-基本工作站课件

软件界面与操作
界面友好
01
采用直观的图形界面,易于学习和操作。
操作简单
02
通过简单的拖拽和点击,即可完成机器人编程和仿真。
自定义设置
03
用户可以根据自己的习惯和需求,自定义界面布局和工具栏。
软件应用案例
案例一
某汽车制造企业使用该软件进行机器人生产线编程,提高了生产 效率和产品质量。
案例二
某电子制造企业利用该软件进行复杂电路板焊接的机器人编程,降 低了人工成本和出错率。
工作站的环境条件如温度、湿 度、洁净度等也会影响离线编 程的效果,应根据实际需求进 行控制和调整。
03
工业机器人离线编程软件介绍
软件功能与特点
功能全面
具备机器人路径规划、仿真、离线编程、碰撞检 测等功能,满足多种应用需求。
高效稳定
软件运行速度快,稳定性高,能够大幅提高生产 效率。
兼容性强
支持多种机器人品牌和型号,方便用户进行扩展 和升级。
06
工业机器人离线编程发展趋势与挑 战
技术发展趋势
1 2 3
智能化发展
随着人工智能技术的进步,工业机器人离线编程 将更加智能化,能够自主进行路径规划、任务执 行和故障诊断。
集成化发展
未来工业机器人离线编程软件将更加集成化,能 够实现机器人、传感器、执行器等设备的统一管 理和控制。
云端化发展
借助云计算技术,工业机器人离线编程将实现云 端化,可以实现数据共享、远程监控和协同作业 。
市场发展前景
市场规模持续扩大
随着工业自动化程度的提高,工业机器人离线编程市场将不断扩 大。
应用领域不断拓展
除了传统的汽车、电子制造等行业,离线编程还将应用于新能源 、轨道交通、航空航天等新兴领域。
第七章 工业机器人工作站及生产线
图7.4 两台两轴变位机和弧焊机器人组成的工作站。(P222)
它可以形成两个工位。但对由两台两轴变位机组成的工作站来说, 操作者装卸工件时,需在两个变位机之间来回走动,每天要走许多路; 但工件焊接时都能作倾斜变位,又可作旋转(自转)运动,有利于保证焊 接质量。
2. 旋转-倾斜变位机与弧焊机器人组合的工作站 图7.5 一台五轴双L型变位机和弧焊机器人组成的工作站。(P222)
一种由两台6 kg弧焊机器人及一台120 kg搬运机器人组成的工作站。 工件用气动夹具装夹在托盘上。共有两个托盘,一个由搬运机器人抓起 递给两台弧焊机器人同时焊接,而另一个托盘放在托盘支架上由操作者 进行装卸工件。随着机器人售价的降低,这种组合的弧焊机器人工作站 的应用日益增多。
图7.9 弧焊机器人 与搬运机器人组合 的工作站(P226)
推土机台车架弧焊机器人工作站,采用两台翻转变位机形成两个工位。 为了使机器人能达到两个翻转变位机上工件的各个焊接位置,机器人安 放在两个组成十字形的滑轨上,使之能沿工件长度方向和两个翻转变位 机之间的方向移动。因工件又重又长,重心又偏向一侧,而且组装时只 进行简单的定位焊,为了避免工件翻转时受力过大使定位焊点开裂,选 用头座和尾座双主动的翻转变位机,使工件在转动时不传递力矩。翻转 变位机的转盘和机器人的十字滑轨都由交流伺服电动机驱动,编码器反 馈位置信息,可以任意编程定位。采用了带自锁的液压夹具。这种夹具 不仅夹紧力大,而且在突然断电后,即使液压系统完全失压,工件无论 处于何种位置也不会脱落。
第七章 工业机器人工作站及生产 线
7.1 焊接机器人
7.1.1 焊接机器人系统的组成和分类
机器人要完成焊接作业必须依赖控制系统与辅助设备的支持和配合。 完整的焊接机器人系统一般由以下几个部分组成:机器人操作机、变位 机、控制器、焊接系统(专用焊接电源、焊枪或焊钳等)、焊接传感器、 中央控制计算机和相应的安全设备等。
它可以形成两个工位。但对由两台两轴变位机组成的工作站来说, 操作者装卸工件时,需在两个变位机之间来回走动,每天要走许多路; 但工件焊接时都能作倾斜变位,又可作旋转(自转)运动,有利于保证焊 接质量。
2. 旋转-倾斜变位机与弧焊机器人组合的工作站 图7.5 一台五轴双L型变位机和弧焊机器人组成的工作站。(P222)
一种由两台6 kg弧焊机器人及一台120 kg搬运机器人组成的工作站。 工件用气动夹具装夹在托盘上。共有两个托盘,一个由搬运机器人抓起 递给两台弧焊机器人同时焊接,而另一个托盘放在托盘支架上由操作者 进行装卸工件。随着机器人售价的降低,这种组合的弧焊机器人工作站 的应用日益增多。
图7.9 弧焊机器人 与搬运机器人组合 的工作站(P226)
推土机台车架弧焊机器人工作站,采用两台翻转变位机形成两个工位。 为了使机器人能达到两个翻转变位机上工件的各个焊接位置,机器人安 放在两个组成十字形的滑轨上,使之能沿工件长度方向和两个翻转变位 机之间的方向移动。因工件又重又长,重心又偏向一侧,而且组装时只 进行简单的定位焊,为了避免工件翻转时受力过大使定位焊点开裂,选 用头座和尾座双主动的翻转变位机,使工件在转动时不传递力矩。翻转 变位机的转盘和机器人的十字滑轨都由交流伺服电动机驱动,编码器反 馈位置信息,可以任意编程定位。采用了带自锁的液压夹具。这种夹具 不仅夹紧力大,而且在突然断电后,即使液压系统完全失压,工件无论 处于何种位置也不会脱落。
第七章 工业机器人工作站及生产 线
7.1 焊接机器人
7.1.1 焊接机器人系统的组成和分类
机器人要完成焊接作业必须依赖控制系统与辅助设备的支持和配合。 完整的焊接机器人系统一般由以下几个部分组成:机器人操作机、变位 机、控制器、焊接系统(专用焊接电源、焊枪或焊钳等)、焊接传感器、 中央控制计算机和相应的安全设备等。
工业机器人工作站系统集成PPT课件

第7页/共56页
知识准备
二、数字式逆变焊接电源RD350
1.RD350弧焊电源额定规格
送丝速度
送丝速度减慢
编码器电缆 保护气体调整时间 预送气时间(起弧前的送气时 间) 滞后气时间(熄弧后的送气时 间) 粘丝防止时间 侦测电压(选型) 外形尺寸(宽×进深×高) 质量 焊接电压设定方法 接触起弧功能 使用者内容 电流、电压波形控制的调整 机器人接口
制造方便,省材料,空载损耗小,节能,噪声小,由电子控制的近代弧焊整流 器的控制与调节灵活方便,适应性强,技术和经济指标高。
适用范围:适用于各种弧焊。 (5) 脉冲型弧焊电源 特点:输出幅值大小周期变化的电流,效率高,可调参数多,调节范围宽而 均匀,热输入可精确控制,设备较复杂,成本高。 适用范围:TIG、MIG、MAG焊和等离子弧焊
知识准备
弧焊机器人一般较多采用熔化极气体保护焊(MIG 焊、MAG焊、CO2焊)或非熔化极气体保护焊(TIG焊、 等离子弧焊)方法。机器人弧焊系统主要包括弧焊电 源、送丝机、焊枪、等。
第3页/共56页
知识准备
一、弧焊电源的选型
弧焊电源是用来对焊接电弧提供电能的一种专用设备。弧焊电源的负载是电 弧,它必须具有弧焊工艺所要求的电气性能,如合适的空载电压,一定形状的 外特性,良好的动态特性和灵活的调节特性等。
全功能逆变式脉冲气体保护焊机
V
AC 380V±10%,三相
HZ 50/60通用
KVA 18
KW 15
A
30~350(根据焊丝粗细而有所不同)
V
12~36(根据焊丝粗细而有所不同)
%
60(以10分为周期)
__ C02短路焊接、MAG/MIG短路焊接、脉冲焊接
工业机器人工作站系统与应用最新版课件第2章
焊接机械手结构合理,操作方便,适合大批量高效率、高质量、 柔性化生产。可以焊接低碳钢、不锈钢、铝材、铜材等材的轴类工 件。焊接机器人能够灵活调整焊接状态,对于结构复杂的零部件配 以各种辅助工装夹具形成焊接流水线,能够实现最佳焊接效果。
SD
第2章 焊接机器人工作站系统
图2.4 轴类焊接机括焊接电源、专用焊枪等。 4.焊接安全保护设施。降低焊接过程中有毒有害气体、 粉尘、 噪声等对身体的危害程度和提高作业安全系数。 5.焊接工装夹具及变位机构等。 装夹和承载工件使其回转和倾 斜,可以得到最佳的焊接姿势和位置。
SD
第2章 焊接机器人工作站系统
图2.2 焊接机器人工作站系统三维布局图 SD
➢ 能够识别不同种类 的焊接机器人工作 站周边设备
➢ 能够应用焊接机器 人工作站
➢ 能够安装与调试焊 接机器人
SD
第2章 焊接机器人工作站系统
焊接机器人是一种高度自动化的焊接设备,采用机器人代 替手工焊接作业是焊接制造业的发展趋势,是提高焊接质量、 降低成本、改善工作环境的重要手段。采用机器人进行焊接, 光有一台机器人是不够的,还必须配备外围设备,即组成工作 站系统。如图2.1所示是日本OTC FD-B4L弧焊机器人工作站。
第2章 焊接机器人工作站系统
二、焊接机器人的系统构成 机器人操作机是焊接机器人系统的执行机构,它由驱动器、传动机构、机器人臂、关 节以及内部传感器(编码盘)等组成。 变位机作为机器人焊接生产线及焊接柔性加工单元的重要组成部分,其作用是将被焊 工件旋转(平移)到最佳的焊接位置。 机器人控制器是整个机器人系统的神经中枢,它由计算机软件、硬件和一些专用电路 构成,其软件包括控制器系统软件、机器人运动学软件、机器人控制软件、机器人自 诊断及自保护软件等。 焊接系统是焊接机器人完成作业的核心装备,其主要由焊钳(点焊机器人)、焊枪 (弧焊机器人)、焊接控制器及水、电、气等辅助部分组成。 中央控制计算机在工业机器人向系统化、PC化和网络化的发展过程中发挥着重要的 作用。 安全设备是焊接机器人系统安全运行的重要保障
SD
第2章 焊接机器人工作站系统
图2.4 轴类焊接机括焊接电源、专用焊枪等。 4.焊接安全保护设施。降低焊接过程中有毒有害气体、 粉尘、 噪声等对身体的危害程度和提高作业安全系数。 5.焊接工装夹具及变位机构等。 装夹和承载工件使其回转和倾 斜,可以得到最佳的焊接姿势和位置。
SD
第2章 焊接机器人工作站系统
图2.2 焊接机器人工作站系统三维布局图 SD
➢ 能够识别不同种类 的焊接机器人工作 站周边设备
➢ 能够应用焊接机器 人工作站
➢ 能够安装与调试焊 接机器人
SD
第2章 焊接机器人工作站系统
焊接机器人是一种高度自动化的焊接设备,采用机器人代 替手工焊接作业是焊接制造业的发展趋势,是提高焊接质量、 降低成本、改善工作环境的重要手段。采用机器人进行焊接, 光有一台机器人是不够的,还必须配备外围设备,即组成工作 站系统。如图2.1所示是日本OTC FD-B4L弧焊机器人工作站。
第2章 焊接机器人工作站系统
二、焊接机器人的系统构成 机器人操作机是焊接机器人系统的执行机构,它由驱动器、传动机构、机器人臂、关 节以及内部传感器(编码盘)等组成。 变位机作为机器人焊接生产线及焊接柔性加工单元的重要组成部分,其作用是将被焊 工件旋转(平移)到最佳的焊接位置。 机器人控制器是整个机器人系统的神经中枢,它由计算机软件、硬件和一些专用电路 构成,其软件包括控制器系统软件、机器人运动学软件、机器人控制软件、机器人自 诊断及自保护软件等。 焊接系统是焊接机器人完成作业的核心装备,其主要由焊钳(点焊机器人)、焊枪 (弧焊机器人)、焊接控制器及水、电、气等辅助部分组成。 中央控制计算机在工业机器人向系统化、PC化和网络化的发展过程中发挥着重要的 作用。 安全设备是焊接机器人系统安全运行的重要保障
工业机器人的生产线及工作站
工夹具及变位机
加大工作空间,提高灵活度
4.4 实例
工作分析
变位机方案
工装卡具
生产线方案
机器人工作站的一般设计原则
充分分析作业对象,拟定最合理的作业工艺; 满足作业的功能要求和环境条件; 满足生产节拍要求; 整体及各组成部分满足安全标准和规范; 设备及控制系统应具有故障显示及报警装置; 便于维护修理; 操作系统应简单明了,便于操作和人工干预; 操作系统便于联网控制; 工作站便于组线; 经济,投产周期短。
机器人生产线的设计原则
各工作站的生产周期尽量合拍
内容多的 分散作业内容 内容多又不可分 重叠设置工作站 内容少的 拼合工序 应急储备站
站间缓冲存储区 物流顺畅 生产线具备一定的柔性 留下升级改造余地
4.3 机器人应用中的辅助装置
末端执行器
分类:搬运类、加工类、测量类 要求:尽量标准化、轻巧、简单
机器人的选型
持重能力 工作空间 自由度、灵活度 精度 移动速度 适应领域
4.2工业机器人生产线的构成及设计原则
机器人生产线是由多个机器人工作站、物流系统和必要的非 机器人工作站组成。 机器人工作站 非机器人工作站
专用装置工作站 人工处理工作站 空设站
中转仓库 机器人子生产线 物流系统 动力系统 控制系站
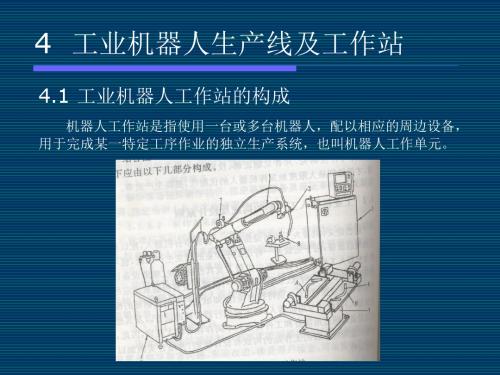
4.1 工业机器人工作站的构成
机器人工作站是指使用一台或多台机器人,配以相应的周边设备, 用于完成某一特定工序作业的独立生产系统,也叫机器人工作单元。
工业机器人工作站组成
机器人 机器人末端执行器 夹具和变位机 机器人架座 配套及安全装置 动力源 工件储运设备 检查、监视和控制系统
工业机器人工作站 ppt课件

夹具体装在主、被动侧接手上; 主动侧交流伺服电机经RV减速器驱动夹具体; 主动侧极限位装死挡铁; 被动侧轴中空,压力气体经活接头引入; 电源负极在弹簧作用下,从轴颈引入; 转轴前端装导线收集盘; 被动侧装两个极限开关。
PPT课件
26
第四节 工作站的气控系统
气控工作原理 : 手控阀 三联件
两套双支点支承两套夹 具体。
H 型支架下方四个定 位气缸支承定位。
PPT课件
24
(2)转台
交流伺服电机经减 速器和一对外齿轮 带动H型支架转动。
0°、180°位设两 套位置开关,超限 开关和死挡块。
导线及气管经转轴 中心孔引至H支架 处。
底座内装柔性链式 管路保护套。
PPT课件
25
(3)双支点系统
备通信。
电气控制柜:控制除机器人控制内容之
外的其他对象,并协调工作站工作。
1. 主电路分析
合上工作站开关:电源指示灯 HL3 亮;
电气柜风扇 M1 工作。
SA2、SA3控制两个照明灯。
SA1经KM使其他设备带电。
220V:
供PLC电源
变压整流→直流24V→输入、输出模块
110V供电磁铁用电(经中间继电器控制)
本例选:M-K6SB型 选择可搬重量因素:
末端执行器净重 末端执行器重心偏移 机器人最大速度及惯性
选择工作空间因素:
满足作业范围要求 工件置于机器人的最佳作业位置
PPT课件
9
二、机器人的传动与结构
传动示意:
S 轴:D1→R1
L 轴:D2→R2 U 轴:D3→R3 R 轴:D4→R4 B 轴:D5→R5 T 轴:D6→R6
7l轴电动机机器人下臂下端左侧与减速器输出盘连接右侧固连的小轴通过轴承支承在u轴连杆内减速器装在旋转体上极限位置安装极限挡块图右侧为u轴电动机减速器输出转盘与连杆连接下臂上臂拉杆和连杆构成平行四边形机构铰链中用园锥滚子轴承用闷盖调整轴承间隙并密封5r轴结构上臂前段用两圆锥滚子轴承支承于后段内
PPT课件
26
第四节 工作站的气控系统
气控工作原理 : 手控阀 三联件
两套双支点支承两套夹 具体。
H 型支架下方四个定 位气缸支承定位。
PPT课件
24
(2)转台
交流伺服电机经减 速器和一对外齿轮 带动H型支架转动。
0°、180°位设两 套位置开关,超限 开关和死挡块。
导线及气管经转轴 中心孔引至H支架 处。
底座内装柔性链式 管路保护套。
PPT课件
25
(3)双支点系统
备通信。
电气控制柜:控制除机器人控制内容之
外的其他对象,并协调工作站工作。
1. 主电路分析
合上工作站开关:电源指示灯 HL3 亮;
电气柜风扇 M1 工作。
SA2、SA3控制两个照明灯。
SA1经KM使其他设备带电。
220V:
供PLC电源
变压整流→直流24V→输入、输出模块
110V供电磁铁用电(经中间继电器控制)
本例选:M-K6SB型 选择可搬重量因素:
末端执行器净重 末端执行器重心偏移 机器人最大速度及惯性
选择工作空间因素:
满足作业范围要求 工件置于机器人的最佳作业位置
PPT课件
9
二、机器人的传动与结构
传动示意:
S 轴:D1→R1
L 轴:D2→R2 U 轴:D3→R3 R 轴:D4→R4 B 轴:D5→R5 T 轴:D6→R6
7l轴电动机机器人下臂下端左侧与减速器输出盘连接右侧固连的小轴通过轴承支承在u轴连杆内减速器装在旋转体上极限位置安装极限挡块图右侧为u轴电动机减速器输出转盘与连杆连接下臂上臂拉杆和连杆构成平行四边形机构铰链中用园锥滚子轴承用闷盖调整轴承间隙并密封5r轴结构上臂前段用两圆锥滚子轴承支承于后段内
项目2 构建基本仿真工业机器人工作站 ppt课件

建框架”的下拉箭头
© ABB August 23, 2021
| Slide 36
任务2-3:创建工业机器人工件坐标与轨迹程序
一.建立工业机器人工件坐标
6.选中“三点”
7.单击“X轴上的第一个点”的 第一个输入框
8.单击1号角
9.单击2号角 10.单击3号角
© ABB August 23, 2021
二.创建工业机器人运动轨迹程序
13.接下来的指令要沿桌子直 线运动,单击框中对应的选 项并设定为MoveL * v150 fine MyTool\Wobj:=Wobj1。
14.拖动机器人,使工具对准 第二个角点。
15.单击“示教指令”。
© ABB August 23, 2021
| Slide 46
任务2-3:创建工业机器人工件坐标与轨迹程序
二.工业机器人的手动操纵
在 “IRB2600_12_165_01” 上单击右键,在菜单列 表中选择“回到机械原 点”,但不是6个关节轴 都为0度,轴5会在30度
的位置。
© ABB August 23, 2021
| Slide 34
任务2-3:创建工业机器人工件坐标与轨迹程序
一.建立工业机器人工件坐标
备”列表中选择 “propellertable”模型进
行导入。
© ABB August 23, 2021
| Slide 13
任务2-1 :布局工业机器人基本工作站
四.摆放周边的模型
2.选中机器人单击右键, 选择“显示机器人工作区
域”。
© ABB August 23, 2021
ห้องสมุดไป่ตู้
| Slide 14
四.摆放周边的模型
© ABB August 23, 2021
| Slide 36
任务2-3:创建工业机器人工件坐标与轨迹程序
一.建立工业机器人工件坐标
6.选中“三点”
7.单击“X轴上的第一个点”的 第一个输入框
8.单击1号角
9.单击2号角 10.单击3号角
© ABB August 23, 2021
二.创建工业机器人运动轨迹程序
13.接下来的指令要沿桌子直 线运动,单击框中对应的选 项并设定为MoveL * v150 fine MyTool\Wobj:=Wobj1。
14.拖动机器人,使工具对准 第二个角点。
15.单击“示教指令”。
© ABB August 23, 2021
| Slide 46
任务2-3:创建工业机器人工件坐标与轨迹程序
二.工业机器人的手动操纵
在 “IRB2600_12_165_01” 上单击右键,在菜单列 表中选择“回到机械原 点”,但不是6个关节轴 都为0度,轴5会在30度
的位置。
© ABB August 23, 2021
| Slide 34
任务2-3:创建工业机器人工件坐标与轨迹程序
一.建立工业机器人工件坐标
备”列表中选择 “propellertable”模型进
行导入。
© ABB August 23, 2021
| Slide 13
任务2-1 :布局工业机器人基本工作站
四.摆放周边的模型
2.选中机器人单击右键, 选择“显示机器人工作区
域”。
© ABB August 23, 2021
ห้องสมุดไป่ตู้
| Slide 14
四.摆放周边的模型
工业机器人工作站配置

术。
稳定性与可靠性
优先选择经过长期实践检验, 稳定性、可靠性高的总线技术
。
兼容性
考虑与现有设备和系统的兼容 性,降低集成难度和成本。
扩展性
预留一定的扩展余地,以适应 未来可能的升级和扩展需求。
工业以太网应用优势
高速传输
提供更高的数据传输速 率,满足实时控制和大
数据传输需求。
灵活性
支持多种拓扑结构和传 输介质,适应不同场景
工作站设计简洁明了,方便日常维护 和保养,降低了企业的运营成本。
高度自动化
灵活性强
安全可靠
易于维护
通过引入工业机器人,实现了生产线 上的自动化抓取、搬运、定位等作业 ,大幅提高了生产效率。
工作站配备了多重安全防护装置和传 感器,确保机器人作业过程中的安全 性和稳定性。
实施效果评估方法
生产效率评估
通过对比引入机器人前后的 生产线效率,计算生产节拍 、产能等关键指标的提升幅 度。
进培训方案。
多种培训方式
采用理论讲解、实操演示、案例分析 等多种培训方式,提高培训效果。
持续培训与提升
定期组织操作人员参加培训,不断提 升其技能水平和操作能力。
06
案例分析:成功应用案例剖析
案例背景介绍
企业需求
某汽车制造企业面临生产线自动 化程度低、人工成本高、生产效 率不稳定等问题,急需引入工业
质量稳定性评估
对机器人作业过程中的不良 品率、重复定位精度等质量 指标进行监测和分析,确保 产品质量稳定可靠。
安全性评估
对工作站的安全防护装置和 传感器进行定期检查和测试 ,确保机器人作业过程中的 安全性。
成本效益分析
综合考虑引入机器人的投资 成本、运营成本、维护成本 等因素,进行成本效益分析 ,评估项目的经济效益。
稳定性与可靠性
优先选择经过长期实践检验, 稳定性、可靠性高的总线技术
。
兼容性
考虑与现有设备和系统的兼容 性,降低集成难度和成本。
扩展性
预留一定的扩展余地,以适应 未来可能的升级和扩展需求。
工业以太网应用优势
高速传输
提供更高的数据传输速 率,满足实时控制和大
数据传输需求。
灵活性
支持多种拓扑结构和传 输介质,适应不同场景
工作站设计简洁明了,方便日常维护 和保养,降低了企业的运营成本。
高度自动化
灵活性强
安全可靠
易于维护
通过引入工业机器人,实现了生产线 上的自动化抓取、搬运、定位等作业 ,大幅提高了生产效率。
工作站配备了多重安全防护装置和传 感器,确保机器人作业过程中的安全 性和稳定性。
实施效果评估方法
生产效率评估
通过对比引入机器人前后的 生产线效率,计算生产节拍 、产能等关键指标的提升幅 度。
进培训方案。
多种培训方式
采用理论讲解、实操演示、案例分析 等多种培训方式,提高培训效果。
持续培训与提升
定期组织操作人员参加培训,不断提 升其技能水平和操作能力。
06
案例分析:成功应用案例剖析
案例背景介绍
企业需求
某汽车制造企业面临生产线自动 化程度低、人工成本高、生产效 率不稳定等问题,急需引入工业
质量稳定性评估
对机器人作业过程中的不良 品率、重复定位精度等质量 指标进行监测和分析,确保 产品质量稳定可靠。
安全性评估
对工作站的安全防护装置和 传感器进行定期检查和测试 ,确保机器人作业过程中的 安全性。
成本效益分析
综合考虑引入机器人的投资 成本、运营成本、维护成本 等因素,进行成本效益分析 ,评估项目的经济效益。