海康雷达区间测速卡口方案
区间测速技术方案
一体机区间测速技术方案✓纯视频检测机动车✓自动号牌识别✓高清卡口功能,支持高清视频录像✓车辆测速及违章自动上传✓支持3G等无线方式工作目录一、系统概述 (4)二、方案叙述 (4)2。
1、设计目标 (4)2.2、设计原则 (5)三、方案设计 (6)四.主要功能模块 (8)4.1 车辆捕获 (8)4。
2通行速度测算 (8)4。
3 车牌识别 (9)4.4高清录像 (9)4.5 自动截取车牌 (10)4.6黑名单自动比对报警 (10)4。
7智能补光 (10)4.8前端卡点存储 (10)4.9自动校时 (10)4.10数据自动上传 (10)4。
11数据检索、流量统计 (10)4。
12本地存储,循环覆盖 (11)4。
13设施安全保障 (11)4.14 开放的系统集成接口 (11)五、系统特点 (11)5。
1、系统特点 (11)六、环境指标 (12)七、技术指标: (12)八、售后服务与技术支持 (13)一、系统概述随着我国私家车数量的激增和高速公路里程的不断增加,人们的出行变得越来越方便快捷。
随之而来如何保障高速公路的畅通和减少事故的发生引起了相关部门的高度重视。
高速公路事故多发,主要是人为因素造成的。
超速行驶、违章变更车道所引发的事故占事故总数的七成左右。
《道路交通安全法实施条例》规定,在高速公路上行驶的小型载客汽车最高车速不得超过每小时120公里。
但在高速公路上,不少汽车的速度远高于最高限速。
一方面相关部门要加大宣传增强司机的安全行车意识;另一方面技术监管和处罚威慑也成为必不可少的手段。
因此如何准确、可靠的获取高速公路机动车的行驶速度成为相关部门关注的焦点。
区间测速系统是基于先进的纯视频车辆检测技术、车辆牌照自动识别技术、网络通讯技术,来实现的一种新型的超速违法取证系统。
区间测速系统通过记录车辆在不同地点的信息(车牌、时间等),并把该车辆在区间内行驶的平均速度和设定的限速值作比较,判定该车是否超速,区间车速=区间距离÷行驶时间。
高速公路高清卡口方案(300W雷达)
高清卡口解决方案—300万雷达检测目录1.概述5..1.1.系统概述51.2.设计原则51.3.设计依据82.需求分析112.1.行业现状112.2.存在问题112.2.1.图片清晰度低112.2.2.应用技术水平低下112.2.3.系统功能扩展性差112.2.4.环境适应性差122.2.5.功能简单,缺乏深度应用122.3.发展趋势122.3.1.高清化122.3.2.集成化122.3.3.网络化122.3.4.智能化133.整体设计143.1.系统架构143.2.系统组成143.2.1.前端采集子系统143.2.2.网络传输子系统163.2.3.中心管理子系统174.详细设计184.1.系统原理184.1.1.雷达检测原理184.1.2.视频检测原理194.2.系统功能214.2.1.系统功能列表214.2.2.前端系统功能详解234.3.系统性能284.4.■■■■■■■■294.4.1.平台主要设备、模块294.4.2.中心平台架设环境设计324.4.3.系统总体框架354.4.4.控制管理功能364.4.5.配置管理功能424.4.6..资源信息获取功能465.特点优势475.1.摄像机高密度集成技术应用提升卡口前端系统稳定性475.2.车牌前端识别系统4.75.3.雷达检测模式保障系统工作稳定485.4.全过程数据安全加密处理485.5.多重冗余的数据安全保障技术485.6.智能分析应用与深度数据挖掘相结合提供更多有用证据495.7.摄像机内置车牌识别等智能算法495.8.低功耗,适合太阳能供电515.9.安装、维护简单,工作量小515.10.前端设备的智能化5.25.11.单车道独立运行能力525.12.对光照气候环境良好的适应性525.13.准确抓拍无牌或者号牌遮挡车辆535.14.车牌识别速度快5.35.15.车牌识别像素、角度容忍度高535.16.车牌识别准确率高5.35.17.双码流摄像机,同步支持抓拍和录像545.18.强光抑制功能545.19.模块化设计,稳定性和扩展性强555.20.设备运行状态自动监测555.21.采用工业级器件,超长寿命555.22.系统扩展性好555.23.解决方案灵活,最大程度满足客户需求566.平台功能清单567.主要设备介绍578.配置清单6..2.9.售后服务承诺639.1.售后服务机构和人员情况641.概述1.1. 系统概述近年来,随着社会经济的不断发展,人们的生活发生了天翻地覆的变化,车辆的普及程度也越来越高,但同时治安问题也越来越突出,尤其是与车辆相关的刑事和治安案件。
区间测速方案..

卡口区间测速系统设计方案设计方案书技术股份有限公司二00九年五月1 区间测速系统1.1概述传统超速抓拍系统采用的是单点测速方式,测量的是车辆的瞬时速度,争议较大、容易躲避。
区间测速是在高速公路某一区间(一般为20公里左右)的两端安装自动抓拍系统,记录车辆通过两端的时间,利用“速度=距离/时间”公式,计算出车辆在该区间内的平均车速。
为达到满意的效果,抓拍系统应具有很高的车辆捕获率和识别正确率。
区间测速让驾驶员难以回避,做为处罚超速违法行为的法律依据将更有说服力。
区间测速与单点测速相比有如下优势:1.监控范围大。
区间测速系统由于对监控路面进行长距离监控,对该区间内行驶的机动车进行全程监控,扩大了超速监控的范围,控制了区间内整体的行车速度。
2.测速精度高。
区间距离为两个监测断面之间的距离,通过激光测量标定,距离误差几乎为零;机动车行驶时间为经过两个监测断面的时间差,所有断面点设备时间同步,并采用GPS时钟校时,时间误差小。
3.“反监控”能力强、监控效果显著。
机动车驾驶员常利用电子狗等高科技设备提前发现电子警察并进行逃避;在单点测速或监控点周边地段刹车减速,经过监控点后继续超速行驶;这类具有反监控能力的违法超速车,在区间测速系统监控下将无所遁形。
4.说服力强,更容易被理解和接受。
区间测速系统测速原理简单,精度高,监控范围为全区间,控制区间内的平均车速,更容易被驾驶人接受。
5.可拓展性更强。
根据应用的需要,区间测速系统可以扩展更多的应用功能,如:道路监控功能、治安(交通)卡口功能、交通流采集功能、非法占用路肩等违法取证功能(路肩加设备)、交通诱导功能(加诱导屏)等。
1.2 系统设计原则1.2.1标准化该系统严格按照公安部颁标准《公路车辆智能监测记录系统通用技术条件》(GA/T 497-2004)规定的技术要求进行设计,同时,在采用高清摄像技术方面又进行了功能和性能上的扩展。
1.2.2可扩展性和兼容性由于用户以后的需求会不断发展,系统建设的数量将随之扩大,在设计上,即要在功能上推陈出新,又要兼容旧的系统,以保护用户的投资,因此我们采用模块化设计,模块间数据传输均采用标准的传输协议,任何一个模块的升级短期内都不会影响到其它模块的正常应用。
卡口测速管理系统方案

智能卡口雷达测速管理系统综合方案/ 视频触发/ 智能卡口管理/ 机动车号牌自动识别目录目录 (1)1.概述 (3)2.系统总体设计 (4)2.1系统建设背景 (4)2.2系统简介 (4)2.3设计依据标准 (5)2.4设计原则和目标 (5)3.方案设计 (7)3.1系统简介 (7)3.2系统结构 (11)3.2.1系统拓扑图 (11)3.2.2前端路口控制部分 (11)3.2.3网络传输部分 (12)3.2.4中心管理部分 (12)4.系统结构及工作原理 (14)4.1系统框架 (14)4.2系统功能 (18)4.2.1车辆捕获 (18)4.2.2超速违法取证 (19)4.2.3图像记录 (21)4.2.4车辆号牌识别 (22)4.2.5流量检测 (23)4.2.6夜间补光模块 (23)4.3中心管理单元 (24)4.4系统主要功能特点 (26)5.技术指标 (27)6.硬件配置 (28)6.1卡口监测系统主机 (28)6.2特写摄像机 (29)6.3特写摄像机镜头 (30)6.4补光灯 (30)6.5防护罩 (30)6.6全景摄像机(可选) (31)6.7全景摄像机镜头 (31)6.8雷达(可选) (32)6.9硬盘录像机(可选) (33)6.10设备机箱(可选) (34)6.11通讯设备(可选) (34)6.12数据库设备(可选) (35)6.13网络交换机(可选) (36)6.14磁盘阵列(可选) (37)6.15视频分配器 (37)7.设计规范 (38)7.1总则 (38)7.2系统构成 (38)7.3系统勘察 (39)7.4设备外观 (40)7.5架杆规格 (40)1.概述卡口自动监测系统作为现代交通违章自动监测的有效补充,在非现场执法中占有重要的地位,通过各相关部门近几年的共同建设,自动监测系统在现代交通执法中得到了大量的应用,并取得了一定的成效。
为了加快城市交通管理系统的信息化、智能化进程,在现有的城建规模上提高城市路网的通行能力,保证车辆的安全快速的行驶,提高管理交通系统的效率和执行力,卡口自动监测系统显得极为重要。
海康威视解决方案1
海康威视解决方案高清楚公路车辆智能监测记录系统杭州海康威视系统技术地址:杭州市马塍路36 号高清楚公路车辆智能检测记录系统1-述........................................................................................................................................................ .. (3)2 设计原那么与依据.....................................................................................................................................................42.1 设计原那么......................................................................................................................................................42.2 设计依据......................................................................................................................................................53 高清公路车辆智能监测(智能卡口)系统 (6)3.1 系统架构......................................................................................................................................................6卡口车辆记录子系统 (6)中心治理子系统 (7)网络通信子系统 (7)3.2 系统工作原理 (8)3.3 系统前端组成 (10)车辆检测部份 (10)车速测量部份 (10)图像搜集抓拍部份 (11)动力电源部份 (11)辅助光自动操纵部份 (12)主控运算机部份 (12)3.4 系统要紧功能 (12)3.5 系统要紧特点 (15)3.6 系统要紧设备技术参数 (19)3.7 系统技术指标 (22)3.8 高清公路车辆智能监测(卡口)系统配置清单 (23)第2 页 /共 24 页高清楚公路车辆智能检测记录系统一、概述最近几年来,随着社会经济的快速进展,机动车保有量迅速增加,交通违法行为致使的道路交通事故大幅增加,严峻危害着人民群众的人身和财产平安。
区间测速技术方案

区间测速技术方案区间测速技术是一种利用设备对行驶车辆进行速度检测和监控的方法。
在现代交通管理中,区间测速技术已经被广泛应用。
本文将阐述区间测速技术的方案及其优点。
一、区间测速技术的原理区间测速技术利用视频监控设备、雷达测速设备以及车辆识别技术等多种设备对车辆的速度进行检测,可以准确地测量车辆的行驶速度。
区间测速技术的原理是将一段公路划分为多个区间,通过监控设备对车辆的速度进行检测,然后计算车辆在不同区间的平均速度,从而判断车辆是否超速。
二、区间测速技术的方案1.选择测速设备区间测速需要选用合适的测速设备来进行检测,主要包括雷达测速设备和激光测速设备两种。
雷达测速设备主要是利用物体反射回来的电磁波进行检测,适用于高速公路的测速;而激光测速设备则是利用激光束对车辆进行测速,适用于城市道路等低速公路。
2.选择监控设备区间测速需要选用合适的监控设备来进行监控,主要包括摄像头监控设备、车位感应技术等多种技术。
摄像头监控设备是最常见的区间测速技术之一,可以适用于不同的公路情况;而车位感应技术则是利用车辆驶过时产生的电磁波来检测车辆的数量和速度等信息,适用于城市道路等资源有限的公路。
3.软件系统区间测速技术需要开发相应的软件系统进行车辆识别、数据传输等工作。
这些软件系统可以根据不同的测速设备和监控设备开发,包括测速算法、数据采集和传输等各种功能。
三、区间测速技术的优点1.准确性高区间测速技术具有高度准确性,可以测量车辆的平均速度,从而精确地判断车辆是否超速。
与传统单点测速方式相比,区间测速技术可以有效避免误判和漏判等问题。
2.效率高区间测速技术可以对多个车辆进行测速,精确计算车辆的速度,从而显著提高了测速效率。
同时,区间测速技术可以实时监测车辆的速度,对违章行为及时进行处理,有效提高了交通管理的效率。
3.安全性高区间测速技术可以在保证道路畅通的情况下,确保车辆行驶安全。
在交通管理中,区间测速技术可以为车辆驾驶员提供重要的安全保障,有效减少了交通事故的发生率。
海康雷达区间测速卡口方案

海康雷达区间测速卡口方案高清雷达测速卡口解决方案(IS-3013VR)目录第1 章概述 (1)1.1 应用背景 (1)1.2 设计原则 (1)1.3 设计依据 (4)第2 章系统总体设计 (7)2.1 设计思想 (7)2.1.1坚持两个原则 (7)2.1.2遵循三个模式 (7)2.1.3保持四个一致 (7)2.2 技术路线 (8)2.2.1卡口系统前端设备技术路线 (8)2.2.2卡口系统中心管理平台技术路线 (8) 2.3 系统结构 (9)2.4 系统组成 (10)2.5 功能描述 (11)2.5.1车辆捕获功能 (11)2.5.2车辆速度检测功能 (11)2.5.3车辆图像记录功能 (11)2.5.4超速抓拍功能 (12)2.5.5智能补光功能 (12)2.5.6车辆牌照自动识别功能 (13)2.5.7车身颜色识别功能 (14)2.5.8车型判别功能 (15)2.5.9车标识别功能 (15)2.5.10车辆子品牌识别功能 (15)2.5.11未系安全带检测功能 (15)2.5.12接打电话检测功能 (15)2.5.13人脸特征抠图 (15)2.5.14打开遮阳板检测 (16)2.5.15前端备份存储功能 (16)2.5.16数据断点续传功能 (16)2.5.17图像防篡改功能 (16)2.5.18网络远程维护功能 (16)2.5.19全景高清录像功能(选配) (16) 2.5.20平台功能 (17)2.6 系统性能指标 (17)第3 章前端子系统设计 (20)3.1 前端子系统组成 (20)3.1.1前端子系统组成 (20)3.1.2车辆测速单元 (21)3.1.3图像采集识别处理单元 (21)3.1.4前端数据处理及上传单元 (22) 3.1.5网络传输单元 (22)3.1.6视频监控单元(选配) (22)3.2 系统现场布局 (22)3.2.1现场布局俯视图 (23)3.2.2现场布局侧视图 (23)3.3 硬件设备配置原则 (23)3.4 前端系统主要设备选型 (24)3.4.1 300万卡口抓拍单元 (24)3.4.2雷达 (26)3.4.3补光灯 (27)3.4.4终端服务器 (28)第4 章网络传输子系统设计 (30)第5 章中心存储子系统设计 (31)5.1 存储方案 (31)5.1.1存储需求 (31)5.1.2存储技术对比 (31)5.1.3存储方案选择 (33)5.2 数据存储设计 (33)5.3 图片存储设计 (34)5.4 视频存储设计(选配) (34)第6 章中心管理平台子系统设计 (36)6.1 平台概述 (36)6.1.1平台整体架构 (36)6.1.2平台功能模块 (38)6.1.3平台业务支撑 (39)6.2 运行环境要求 (40)6.2.1硬件环境 (40)6.2.2软件环境 (41)6.2.3网络环境 (42)6.3 配置推荐原则 (42)6.4 平台功能设计 (51)6.4.1平台基础应用 (51)6.4.2平台增值应用 (72)6.4.3平台新技术应用 (90)第7 章系统特点 (99)7.1 一套卡口抓拍单元覆盖2/3个车道 (99)7.2 摄像机高密度集成技术应用提升卡口前端系统稳定性 (99) 7.3 车牌前端识别技术 (99)7.4 视频检测模式保障系统工作稳定性 (100)7.5 雷达测速模式保障速度的准确性 (100)7.6 系统运维成本低 (101)7.7 前端系统结构简单稳定 (101)第8 章系统拍摄效果 (102)8.1 300万雷达卡口抓拍效果 (102) 8.1.1白天抓拍效果 (102)8.1.2夜间抓拍效果 (104)。
区间测速解决方案

区间测速解决方案引言在道路交通管理中,区间测速是一种常见的手段,用于控制车辆的速度,提高交通安全性。
本文档将介绍一种区间测速解决方案,包括其原理、实施步骤和效果评估等内容。
解决方案原理区间测速解决方案的基本原理是利用两个位置之间已知的距离和车辆通过该距离所用的时间,计算出车辆的平均速度,从而确定是否违规超速。
下面是该方案的具体实施步骤。
实施步骤1.选定测速区间:首先需要确定一个合适的测速区间,通常是一段路段或者是两个位置之间的距离。
2.安装测速设备:在选定的测速区间内,安装合适的测速设备,常用的设备包括雷达测速仪和摄像头。
3.校准测速设备:在设备安装完毕后,需要对测速设备进行校准,确保其测得的速度准确可靠。
4.记录车辆通过时间:设备安装好并校准完成后,开始记录车辆通过测速区间的时间,通常会使用计时器或者其他计时装置。
5.计算车辆平均速度:根据车辆通过测速区间的时间和已知的距离,计算出车辆的平均速度。
常用的计算公式为:速度 = 距离 / 时间。
6.比较车辆速度与限速:将计算得到的车辆平均速度与道路限速进行比较,判断车辆是否超速。
效果评估区间测速解决方案的效果可以通过以下几个方面进行评估:1.准确性:测速设备的准确性是保证整个方案有效的关键因素。
可以通过与其他准确测速设备的对比和实际车速测量结果的比对来评估准确性。
2.稳定性:测速设备应当具有良好的稳定性,可以在复杂的道路环境和不同的天气条件下正常工作。
可以通过长时间运行和不同环境下的测试来评估稳定性。
3.可靠性:测速设备应当具有高度可靠性,能够正常工作并提供准确的测速结果。
可以通过多次测速实验和故障率统计来评估可靠性。
4.可操作性:方案的可操作性是指在实际使用过程中是否便捷、简单。
可以通过用户体验调查和操作指南的编写来评估可操作性。
结论区间测速解决方案是一种有效的控制车辆速度的手段,可以提高道路交通的安全性。
该方案通过测量车辆通过已知距离所用的时间,计算出车辆的平均速度,并与道路限速进行比较,从而确定是否超速。
海康-卡口手册

`海康威视智能交通-系统产品手册(卡口分册)文档编号PDM3012100版本V3.1.0.0build130328编制于建志审核邹辉批准裴建军杭州海康威视系统技术有限公司2013年03月28日目录产品线分类说明 (1)I 需求分类与产品方案 (2)Ⅱ产品方案特点 (3)Ⅲ产品方案 (5)3.1机动车捕获-线圈触发方案 (5)3.1.1主推方案 (5)3.1.1.1功能及性能指标 (5)3.1.1.2效果图片 (6)3.1.1.3详细方案 (8)3.1.1.3.1IS-3012LL/01-看清人脸、闪光灯补光、3线圈触发测速、200万1车道. 83.1.1.3.2IS-3013LL/01-看清人脸、闪光灯补光、3线圈触发测速、300万2车道. 93.1.1.3.3IS-3015LL/01-看清人脸、闪光灯补光、3线圈触发测速、500万3车道113.1.2其他方案 (13)3.1.2.1功能及性能指标 (13)3.1.2.2效果图片 (15)3.1.2.3详细方案 (17)3.1.2.3.1看清人脸方案 (17)3.1.2.3.1.1IS-3012LL/03-看清人脸、闪光灯补光、前后牌同线圈抓拍、3线圈触发测速、200万1车道 (17)3.1.2.3.1.2IS-3018LL/01-看清人脸、闪光灯补光、3线圈触发测速、800万3车道-未发布 (18)3.1.2.3.2不看人脸方案 (20)3.1.2.3.2.1IS-3012LL/04-不看人脸、LED补光灯补光、3线圈触发测速、200万1车道 (20)3.1.2.3.2.2IS-3013LL/02-不看人脸、LED补光灯补光、3线圈触发测速、300万2车道 (22)3.1.2.3.2.3IS-3015LL/02-不看人脸、LED补光灯补光、3线圈触发测速、500万3车道 (24)3.1.2.3.3红外卡口方案 (26)3.1.2.3.3.1IS-3012LL/13-红外闪光灯补光、3线圈触发测速、200万1车道. 263.1.2.3.3.2IS-3013LL/03-红外闪光灯补光、3线圈触发测速、300万2车道. 283.1.2.3.3.3IS-3015LL/03-红外闪光灯补光、3线圈触发测速、500万3车道. 303.1.3过渡方案 (32)3.1.3.1功能及性能指标 (32)3.1.3.2效果图片 (33)3.1.3.3详细方案 (34)3.1.3.3.1IS-3012LL/06-看清人脸、闪光灯补光、3线圈触发测速、200万2车道343.1.3.3.2IS-3012LL/07-不看人脸、LED补光灯补光、3线圈触发测速、200万2车道 (36)3.2机动车捕获-视频触发方案 (38)3.2.1主推方案 (38)3.2.1.1功能及性能指标 (38)3.2.1.2效果图片 (39)3.2.1.3详细方案 (39)3.2.1.3.1IS-3012VN/01-看清人脸、闪光灯补光、视频触发、无测速、200万1车道 (39)3.2.1.3.2IS-3013VN/01-看清人脸、闪光灯补光、视频触发、无测速、300万2车道 (41)3.2.1.3.3IS-3015VN/01-看清人脸、闪光灯补光、视频触发、500万3车道-未发布 (42)3.2.2其他方案 (44)3.2.2.1功能及性能指标 (44)3.2.2.2效果图片 (45)3.2.2.3详细方案 (45)3.2.2.3.1不看人脸方案 (45)3.2.2.3.1.1IS-3012VN/02-不看人脸、LED补光灯补光、视频触发、无测速、200万1车道 (45)3.2.2.3.1.2IS-3012VR/04-不看人脸、闪光灯补光、视频触发、雷达测速、200万1车道 (47)3.2.2.3.1.3IS-3013VN/02-不看人脸、LED补光灯补光、视频触发、无测速、300万2车道 (49)3.2.2.3.1.4IS-3015VN/02-不看人脸、LED灯补光、视频触发、无测速、500万3车道 (50)3.2.2.3.2红外卡口方案 (52)3.2.2.3.2.1IS-3012VN/10-不看人脸、红外闪光灯补光、视频触发、无测速、200万1车道 (52)3.2.2.3.2.2IS-3013VN/05-不看人脸、红外闪光灯补光、视频触发、无测速、300万2车道-未发布 (54)3.2.2.3.2.3IS-3015VN/03-不看人脸、红外闪光灯补光、视频触发、无测速、500万3车道-未发布 (56)3.2.3过渡方案 (58)3.2.3.1功能及性能指标 (58)3.2.3.2效果图片 (59)3.2.3.3详细方案 (59)3.2.3.3.1IS-3012VN/03-看清人脸、闪光灯补光、视频触发、无测速、200万2车道 (59)3.2.3.3.2IS-3012VN/04-不看人脸、LED补光灯补光、视频触发、无测速、200万2车道 (61)3.3机、非、人捕获方案(混行卡口) (62)3.3.1主推方案 (62)3.3.1.1功能及性能指标 (62)3.3.1.2效果图片 (63)3.3.1.3详细方案 (65)3.3.1.3.1IS-3012VN/05-不看人脸、视频检测、无测速、混合车道目标(机动车、非机动车、行人)抓拍,LED频闪灯补光、200万1车道 (65)3.3.1.3.2IS-3013VN/03-不看人脸、视频检测、无测速、混合车道目标(机动车、非机动车、行人)抓拍,LED频闪灯补光、300万2车道-未发布 (66)3.3.2过渡方案 (68)3.3.2.1功能及性能指标 (68)3.3.2.2效果图片 (69)3.3.2.3详细方案 (69)3.3.2.3.1IS-3012VN/08-不看人脸、视频检测、无测速、混合车道目标(机动车、非机动车、行人)抓拍,LED频闪灯补光、200万2车道 (69)附录1 相关文件 (71)附录2 修订记录 (71)产品线分类说明IS-30XYAB/MNIS-30XYAB/MN-abIS-30XYAB/MN-abcdefgh如:IS-301YAB/MN-ab 卡口(公路车辆智能监测记录系统)IS-302YAB/MN-abcdefgh 电子警察(包含闯红灯自动记录系统和压黄线逆行等交通违法检测系统)IS-303YAB/MN 汽车牌照识别器应用系统IS-304YAB/MN 停车诱导和出入口系统IS-305YAB/MN 视频检测器应用系统IS-306YAB/MN 机动车测速系统说明:IS- 产品引导符,代表集成类产品。
海康雷达区间测速卡口方案

高清雷达测速卡口解决方案(IS-3013VR)目录第1 章概述 (1)1.1 应用背景 (1)1.2 设计原则 (1)1.3 设计依据 (4)第2 章系统总体设计 (7)2.1 设计思想 (7)2.1.1坚持两个原则 (7)2.1.2遵循三个模式 (7)2.1.3保持四个一致 (7)2.2 技术路线 (8)2.2.1卡口系统前端设备技术路线 (8)2.2.2卡口系统中心管理平台技术路线 (8)2.3 系统结构 (9)2.4 系统组成 (10)2.5 功能描述 (11)2.5.1车辆捕获功能 (11)2.5.2车辆速度检测功能 (11)2.5.3车辆图像记录功能 (11)2.5.4超速抓拍功能 (12)2.5.5智能补光功能 (12)2.5.6车辆牌照自动识别功能 (13)2.5.7车身颜色识别功能 (14)2.5.8车型判别功能 (15)2.5.9车标识别功能 (15)2.5.10车辆子品牌识别功能 (15)2.5.11未系安全带检测功能 (15)2.5.12接打电话检测功能 (15)2.5.13人脸特征抠图 (15)2.5.14打开遮阳板检测 (16)2.5.15前端备份存储功能 (16)2.5.16数据断点续传功能 (16)2.5.17图像防篡改功能 (16)2.5.18网络远程维护功能 (16)2.5.19全景高清录像功能(选配) (16)2.5.20平台功能 (17)2.6 系统性能指标 (17)第3 章前端子系统设计 (20)3.1 前端子系统组成 (20)3.1.1前端子系统组成 (20)3.1.2车辆测速单元 (21)3.1.3图像采集识别处理单元 (21)3.1.4前端数据处理及上传单元 (22)3.1.5网络传输单元 (22)3.1.6视频监控单元(选配) (22)3.2 系统现场布局 (22)3.2.1现场布局俯视图 (23)3.2.2现场布局侧视图 (23)3.3 硬件设备配置原则 (23)3.4 前端系统主要设备选型 (24)3.4.1 300万卡口抓拍单元 (24)3.4.2雷达 (26)3.4.3补光灯 (27)3.4.4终端服务器 (28)第4 章网络传输子系统设计 (30)第5 章中心存储子系统设计 (31)5.1 存储方案 (31)5.1.1存储需求 (31)5.1.2存储技术对比 (31)5.1.3存储方案选择 (33)5.2 数据存储设计 (33)5.3 图片存储设计 (34)5.4 视频存储设计(选配) (34)第6 章中心管理平台子系统设计 (36)6.1 平台概述 (36)6.1.1平台整体架构 (36)6.1.2平台功能模块 (38)6.1.3平台业务支撑 (39)6.2 运行环境要求 (40)6.2.1硬件环境 (40)6.2.2软件环境 (41)6.2.3网络环境 (42)6.3 配置推荐原则 (42)6.4 平台功能设计 (51)6.4.1平台基础应用 (51)6.4.2平台增值应用 (72)6.4.3平台新技术应用 (90)第7 章系统特点 (99)7.1 一套卡口抓拍单元覆盖2/3个车道 (99)7.2 摄像机高密度集成技术应用提升卡口前端系统稳定性 (99)7.3 车牌前端识别技术 (99)7.4 视频检测模式保障系统工作稳定性 (100)7.5 雷达测速模式保障速度的准确性 (100)7.6 系统运维成本低 (101)7.7 前端系统结构简单稳定 (101)第8 章系统拍摄效果 (102)8.1 300万雷达卡口抓拍效果 (102)8.1.1白天抓拍效果 (102)8.1.2夜间抓拍效果 (104)概述应用背景多年以来,超速行驶一直是导致交通事故的主要原因之一。
整体介绍---海康威视智能交通应用方案

其他应用系统—公交专用道取证系统
其他应用系统—公交专用道取证系统
流动式检测
流动式检测设备主要基于GPS技术、车 道线辅助视频检测技术、车牌识别技术以及 3G通讯技术研发。通过在公交车上安装检 测设备,实现对“行驶途中,对公交车通行 效率发生实际影响的车辆”的检测。
其他应用系统—公交专用道取证系统
2014年标准明确了几项功能!
电子警察系统
占用专用道
电子警察
电子警察系统
•
•
一方面:提升摄像机的低照度效果,降低对补光强度的要求;
另一方面:降低补光灯对环境的影响。
电子警察系统
600万三车道
GA/T496-2014( 未发布) GA/T496-2009
新标准,至少2个位置看清车牌!
•
•
600万三车道比500万三车道,车牌看的更清了;响应新标准;
高清卡口系统
交通信号控制系统
机动车测速系统
交通诱导系统
道路智慧监控系统
交通事件检测系统
电子警察系统
出入口及停车场系统
交通事件检测系统
标清/高清摄像机 事件检测主机(多路) 报警器 报警器
传输网络
高清一体机
中心平台
基本功能
•支持服务器多路接入模式 •服务器支持IP/模拟接入 •支持单相机模式 •支持拥堵检测 •支持隧道烟雾检测 •支持行人、抛洒物检测 •支持图片+片段录像关联报警 嵌入式检测主机!一体机!
业务实践…
支持5种常见车型分类:大货车、大客车、面包车、小货车、轿车(小汽车)。
NEW!5种!
高清卡口系统
车标识别
•
•
摄像机内置识别算法,无需外加识别服务器。
雷达测速卡口方案
浙江徳威电子有限公司DSIPC4472-6高清网络摄像相机智能卡口系统目录一、徳威电子高清智能卡口系统简介..................... 错误!未定义书签。
二、设计原则......................................... 错误!未定义书签。
三、设计依据......................................... 错误!未定义书签。
四、系统整体描述..................................... 错误!未定义书签。
1、系统性能指标...................................... 错误!未定义书签。
2、系统功能概述...................................... 错误!未定义书签。
五、系统详细设计..................................... 错误!未定义书签。
1、系统构成.......................................... 错误!未定义书签。
2、系统软件介绍...................................... 错误!未定义书签。
3、系统功能.......................................... 错误!未定义书签。
4、系统特点.......................................... 错误!未定义书签。
六、主要设备介绍..................................... 错误!未定义书签。
1、高清智能网络摄像相机DSIPC4472-6 .................. 错误!未定义书签。
2、智能高清嵌入式处理器.............................. 错误!未定义书签。
3、雷达.............................................. 错误!未定义书签。
区间测速方案

区间测速方案导言在交通管理中,为了保障道路车辆的安全行驶,实施区间测速方案是必不可少的。
区间测速方案是指在某段道路的起点和终点之间设置测速设备,通过测量车辆通过该区间所需的时间来判断其平均速度是否超过限速值。
本文将介绍一种针对区间测速的解决方案,以提高交通管理的效果。
方案概述该区间测速方案采用先进的雷达设备结合计算机算法进行测速。
具体步骤如下:1.安装雷达设备:首先,在测速区间的起点和终点分别安装雷达设备,雷达设备可以通过微波信号实时检测车辆的速度。
2.数据采集:当车辆通过测速区间时,雷达设备将检测到车辆的速度,并将数据传输给计算机进行处理。
3.数据处理:计算机根据接收到的数据计算车辆通过测速区间所需的时间,并根据测速区间的长度推算出车辆的平均速度。
4.速度判断:计算机根据测速区间的平均速度与规定的限速值进行比较,如果超速则进行记录,否则不做处理。
5.数据储存与输出:超速记录将被储存在计算机中,并可以通过打印、导出等方式进行输出,以便于交通管理部门进行日常管理和处理。
优势与特点相比传统的测速方案,本方案具有以下优势和特点:1.高效准确:采用先进的雷达设备和计算机算法,能够实时准确地测量车辆通过测速区间所需的时间和平均速度。
2.自动化操作:整个测速过程完全自动化,无需人工干预,大大提高了工作效率,并减少了人为错误的可能性。
3.大数据支持:通过计算机储存和处理数据,交通管理部门可以获得大量的测速数据,以便分析交通状况和制定更有效的交通管理措施。
4.统一管理:所有的测速记录均储存在计算机中,可以通过网络进行集中管理,方便交通管理部门进行查询和处理。
5.便捷输出:测速数据可以通过打印、导出等方式进行输出,方便交通管理部门进行日常管理与交警部门进行执法操作。
应用场景该区间测速方案可以广泛应用于以下场景:1.高速公路:可以在高速公路上设置测速区间,对车辆的平均速度进行监测,以改善交通拥堵和提高道路安全。
2.城市道路:可以在城市道路的主干道上设置测速区间,对车辆的平均速度进行监测,以提高交通管理水平和减少交通事故发生率。
智慧交通雷达卡口测速技术方案

智慧交通雷达卡口测速技术方案摘要:随着交通车辆数量的逐年增加,交通事故频繁发生,交通安全问题越来越引起人们的关注。
而智慧交通雷达卡口测速技术作为一种高效准确的交通监控手段,可以有效提高交通安全水平。
本文将介绍智慧交通雷达卡口测速技术的基本原理、技术优势和实施方案。
一、技术原理1.雷达检测:通过设立雷达探头,实时检测车辆的速度。
2.图像识别:通过摄像头拍摄行驶中的车辆,并识别车牌号码。
3.数据分析:将雷达检测到的车辆速度与图像识别得到的车牌号码进行匹配分析。
4.数据传输:将分析结果传输到交通监控中心,实现对违法超速车辆的记录和处罚。
二、技术优势1.高准确性:该技术利用雷达和图像识别相结合的方式进行测速,相比传统的测速方法更加准确可靠。
2.实时监测:传感器与监控中心之间的数据传输几乎是实时的,可以快速发现并处理违法超速行为。
3.自动化处理:该技术可实现对违法超速行为的自动处理,避免了人为因素的影响,并提高了交通安全水平。
4.数据存储:该技术可以将每一起违法超速行为的信息保存在数据库中,方便后续查询和分析。
三、实施方案1.基础设施建设:在交通流量较大的路段设置雷达探头和摄像头,建立测速点。
针对不同的道路情况,可以选择不同类型的雷达设备和摄像头。
2.系统集成:将雷达和图像识别设备与交通监控中心进行连接和集成,实现数据的实时传输和分析处理。
3.数据处理软件:开发符合实际需求的数据处理软件,对采集到的数据进行匹配分析,筛选出违法超速车辆,并将信息传输到交通监控中心。
4.数据存储和查询:将每一起违法超速行为的信息保存在数据库中,并设计相应的查询系统,方便后续的数据分析和查询。
四、应用前景智慧交通雷达卡口测速技术的应用前景广阔。
通过实时监测和自动化处理,可以有效提高交通安全水平,降低交通事故发生率。
同时,该技术还可以帮助交通部门实现对交通违法行为的有效打击和管理,提升交通管理的水平。
预计未来随着智能城市建设的推进,该技术将在各个城市得到广泛应用和推广。
海康威视触发雷达说明书
海康威视触发雷达说明书
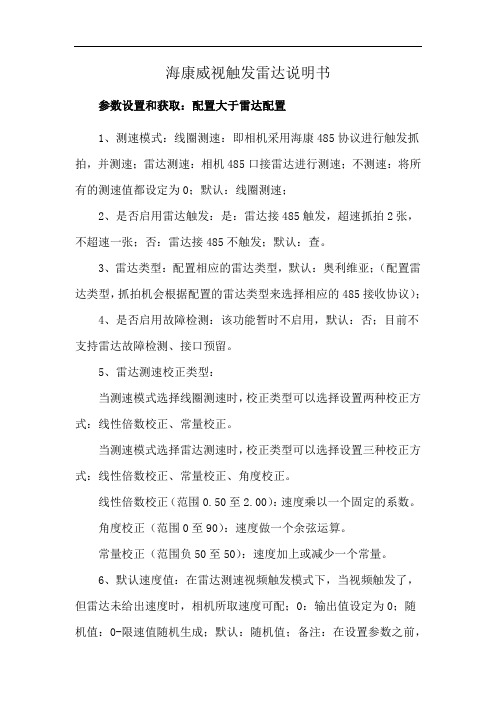
参数设置和获取:配置大于雷达配置
1、测速模式:线圈测速:即相机采用海康485协议进行触发抓拍,并测速;雷达测速:相机485口接雷达进行测速;不测速:将所有的测速值都设定为0;默认:线圈测速;
2、是否启用雷达触发:是:雷达接485触发,超速抓拍2张,不超速一张;否:雷达接485不触发;默认:查。
3、雷达类型:配置相应的雷达类型,默认:奥利维亚;(配置雷达类型,抓拍机会根据配置的雷达类型来选择相应的485接收协议);
4、是否启用故障检测:该功能暂时不启用,默认:否;目前不支持雷达故障检测、接口预留。
5、雷达测速校正类型:
当测速模式选择线圈测速时,校正类型可以选择设置两种校正方式:线性倍数校正、常量校正。
当测速模式选择雷达测速时,校正类型可以选择设置三种校正方式:线性倍数校正、常量校正、角度校正。
线性倍数校正(范围0.50至2.00):速度乘以一个固定的系数。
角度校正(范围0至90):速度做一个余弦运算。
常量校正(范围负50至50):速度加上或减少一个常量。
6、默认速度值:在雷达测速视频触发模式下,当视频触发了,但雷达未给出速度时,相机所取速度可配;0:输出值设定为0;随机值:0-限速值随机生成;默认:随机值;备注:在设置参数之前,
先获取,然后修改所要修改的参数,然后再设置。
海康威视智能交通方案

多码流编码
图片存储、视频存储
断网续传、一键复位
• 摄像机:鳍型散热、无风扇设计;交通专用的ISP技术,确保成像效果。 • 前端主机:嵌入式DSP架构,相比传统的X86架构主机,大大提升了室外使用的稳
定性。
高清卡口系统
部分产品设计
网络、RS485防雷 温控模块
• 护罩:独有的专业设计,大大减少卡口设备中易于出现的面板脏、积水现象。 • 抓拍单元:内置防雷、温控,适应高速环境(易雷击、四季温差大)。
高清卡口系统 机动车测速系统 道路智慧监控系统 交通事件检测系统
电子警察系统 停车场应用系统 交通诱导系统 其他应用系统
机动车测速系统
路侧测速
卡口测速
区间测速
机动车测速系统
超速连拍:帧率高、补光灯回电时间快, 不会冲出视场。
机动车测速系统
普通雷达:波瓣角大,有误测速
HIK测速雷:窄波束,单车道
高清卡口系统
暴爆 闪 灯
白夜 天间
高清卡口系统
白 光 LED
白夜 天间
高清卡口系统
红 外
白夜 天间
高清卡口系统
300W双车道
• 左图:常规的1080P(1920*1080)双车道卡口; • 右图:海康300W(2048*1536)双车道 传统卡口采用虚拟线圈检测;海康卡口采用全画面分析、多种技术复合式检测。 • 传统卡口只针对车辆进行检测;海康卡口实现机非人全目标检测。 • 海康视频卡口,对复杂环境下的过车适应性好。
中心平台
• 摄像机内置检测算法,无需外加识别服务器。 • 检出有效率高。
高清卡口系统
红外技术
• 红外共焦镜头、红外补光灯、红外摄像机。 • 红外图像下的 成像技术、视频检测技术、车牌识别技术。
道路区间测速标定服务技术方案

道路区间测速标定服务技术方案说到道路区间测速标定,大家第一反应是什么?是不是会想起那些老是让你心跳加速的测速照相机?你是不是也曾经因为开车稍微超速了,心里在想:“哎呀,完了,罚单又来了。
”今天咱们要聊的可不是让大家抓狂的测速照相机,而是如何通过区间测速标定,来确保这些测速设备更精准、更公平。
这玩意儿,可能大家了解的不多,但绝对是事关交通安全和公正执法的好东西。
好啦,接下来的内容,你就当我在和你唠嗑吧,轻松点。
先说说啥是“道路区间测速”吧。
你肯定知道普通的固定测速,那个测速照相机一站就是一个点,你通过的时候,如果超速了,啪啪一个闪光灯,嘿嘿,照片都拍好了。
问题是,光拍一张照片有什么用呢?很多时候,大家开车都不是一直开得很快,突然一脚油门踩下去超速了,照相机就拍了个“定格画面”。
但是,如果是在一段路程内慢慢加速的,没超速,但总时速加起来也挺快,这种情况下就不好判定了。
所以,区间测速就是解决这个问题的关键。
简单来说,区间测速就是通过对一个具体路段的车速进行监控,不是只盯一个点,而是通过路程的起点和终点来算你整个过程中平均的行驶速度。
如果你的平均速度超过了那个限速,那就恭喜你,收到罚单的概率就大了。
你看,这不就像是你走路上学,总老师站一个点拍照那样,今天这走得慢点,明天那走得快点,老师看到了之后能明白你到底是不是在走“捷径”。
这种方式反而更加合理和精确了。
那这玩意儿怎么标定呢?别急,这就到了咱们今天的重点了。
所谓的标定,其实就是为这个区间测速系统打好基础,确保它的准确性,不让它乱跑。
你想象一下,如果测速设备根本没有经过标定,那岂不是像一个随时可能掉链子的“千里眼”?那时候,大家开车,连自己是否超速都不清楚,谁知道是哪来的误差?标定的过程其实挺复杂的。
得用一些标准化的设备,像精确的测速仪器、控制系统这些,给区间测速设备做个详细的“体检”。
有时候还得模拟各种情况,像车速突然加快,或者突然减慢,看看这些设备能不能及时准确地反应出来。
海康威视高清智能卡口系统设计方案共22页文档
高清智能卡口系统设计方案杭州海康威视系统技术有限公司2009年9月V1.002000099年222000099目录第一章概述 (3)第二章系统功能及性能指标 (4)2.1.系统功能 (4)2.1.1.车辆捕获功能 (4)2.1.2.车辆测速功能 (4)2.1.3.车辆特征和车辆驾驶人面部特征高清晰拍照功能 (4)2.1.4.车辆牌照自动识别功能 (5)2.1.5.车身颜色自动识别功能 (6)2.1.6.车辆型号判别功能 (6)2.1.7.全景数字录像功能 (6)2.1.8.记录及图像存储功能 (6)2.1.9.数据自动上传和历史数据下载功能 (6)2.1.10.Web方式数据查询浏览功能 (7)2.1.11.前端设备管理维护功能 (7)2.1.12.远程自动更新功能 (7)2.2.性能指标 (7)第三章系统特点 (10)3.1.完全嵌入式处理系统 (10)3.2.车辆数据全天候存储 (10)3.3.基于TCP/IP的前后端独立网络架构 (11)3.4.智能工业相机实现高捕获率 (11)3.5.全天候高清成像, (11)3.5.1.反馈控制的全天候高清晰成像 (11)3.5.2.综合技术应用 (12)3.6.独特的车身颜色识别 (12)3.7.高牌照识别率 (12)第四章系统设计方案 (13)4.1.系统结构 (13)4.1.1.系统拓扑图 (13)4.1.2.系统设备布局示意图 (13)4.1.3.现场布局侧视图 (13)4.2.工作原理 (14)4.3.各子系统构造 (15)4.3.1.车辆检测子系统 (15)4.3.2.车速测量子系统 (15)4.3.3.成像与控制子系统 (15)4.3.4.图像采集与识别处理子系统 (16)4.3.5.车辆信息存储管理子系统 (16)4.3.6.配电及安全系统 (16)4.4.系统主要设备性能规格 (17)4.4.1.智能工业相机 (17)4.4.2.智能闪光灯 (18)4.4.3.智能工业相机终端服务器 (18)4.5.智能工业相机终端服务器软件主要功能 (19)4.5.1.车辆通行数据 (19)4.5.2.日志数据 (19)4.5.3.请求数据 (19)4.5.4.设备状态 (19)4.5.5.控制命令 (19)4.5.6.参数配置 (20)4.5.7.自动更新 (20)4.5.8.权限设置 (20)4.5.9.自动恢复 (20)4.6.软件Web界面 (20)4.7.系统用户接口 (20)4.7.1.硬件用户接口 (20)4.7.2.软件用户接口 (20)第五章系统设备清单 (21)第一章概述近年来,随着社会经济的快速发展,机动车数量的迅速增长,公路运输变得越来越繁忙。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高清雷达测速卡口解决方案
(IS-3013VR)
目录
第1 章概述 (1)
1.1 应用背景 (1)
1.2 设计原则 (1)
1.3 设计依据 (4)
第2 章系统总体设计 (7)
2.1 设计思想 (7)
2.1.1坚持两个原则 (7)
2.1.2遵循三个模式 (7)
2.1.3保持四个一致 (7)
2.2 技术路线 (8)
2.2.1卡口系统前端设备技术路线 (8)
2.2.2卡口系统中心管理平台技术路线 (8)
2.3 系统结构 (9)
2.4 系统组成 (10)
2.5 功能描述 (11)
2.5.1车辆捕获功能 (11)
2.5.2车辆速度检测功能 (11)
2.5.3车辆图像记录功能 (11)
2.5.4超速抓拍功能 (12)
2.5.5智能补光功能 (12)
2.5.6车辆牌照自动识别功能 (13)
2.5.7车身颜色识别功能 (14)
2.5.8车型判别功能 (15)
2.5.9车标识别功能 (15)
2.5.10车辆子品牌识别功能 (15)
2.5.11未系安全带检测功能 (15)
2.5.12接打电话检测功能 (15)
2.5.13人脸特征抠图 (15)
2.5.14打开遮阳板检测 (16)
2.5.15前端备份存储功能 (16)
2.5.16数据断点续传功能 (16)
2.5.17图像防篡改功能 (16)
2.5.18网络远程维护功能 (16)
2.5.19全景高清录像功能(选配) (16)
2.5.20平台功能 (17)
2.6 系统性能指标 (17)
第3 章前端子系统设计 (20)
3.1 前端子系统组成 (20)
3.1.1前端子系统组成 (20)
3.1.2车辆测速单元 (21)
3.1.3图像采集识别处理单元 (21)
3.1.4前端数据处理及上传单元 (22)
3.1.5网络传输单元 (22)
3.1.6视频监控单元(选配) (22)
3.2 系统现场布局 (22)
3.2.1现场布局俯视图 (23)
3.2.2现场布局侧视图 (23)
3.3 硬件设备配置原则 (23)
3.4 前端系统主要设备选型 (24)
3.4.1 300万卡口抓拍单元 (24)
3.4.2雷达 (26)
3.4.3补光灯 (27)
3.4.4终端服务器 (28)
第4 章网络传输子系统设计 (30)
第5 章中心存储子系统设计 (31)
5.1 存储方案 (31)
5.1.1存储需求 (31)
5.1.2存储技术对比 (31)
5.1.3存储方案选择 (33)
5.2 数据存储设计 (33)
5.3 图片存储设计 (34)
5.4 视频存储设计(选配) (34)
第6 章中心管理平台子系统设计 (36)
6.1 平台概述 (36)
6.1.1平台整体架构 (36)
6.1.2平台功能模块 (38)
6.1.3平台业务支撑 (39)
6.2 运行环境要求 (40)
6.2.1硬件环境 (40)
6.2.2软件环境 (41)
6.2.3网络环境 (42)
6.3 配置推荐原则 (42)
6.4 平台功能设计 (51)
6.4.1平台基础应用 (51)
6.4.2平台增值应用 (72)
6.4.3平台新技术应用 (90)
第7 章系统特点 (99)
7.1 一套卡口抓拍单元覆盖2/3个车道 (99)
7.2 摄像机高密度集成技术应用提升卡口前端系统稳定性 (99)
7.3 车牌前端识别技术 (99)
7.4 视频检测模式保障系统工作稳定性 (100)
7.5 雷达测速模式保障速度的准确性 (100)
7.6 系统运维成本低 (101)
7.7 前端系统结构简单稳定 (101)
第8 章系统拍摄效果 (102)
8.1 300万雷达卡口抓拍效果 (102)
8.1.1白天抓拍效果 (102)
8.1.2夜间抓拍效果 (104)。