工作四象限坐标图
时间四象限管理在中职生学习和生活中的运用

第四象限
重要
第一象限
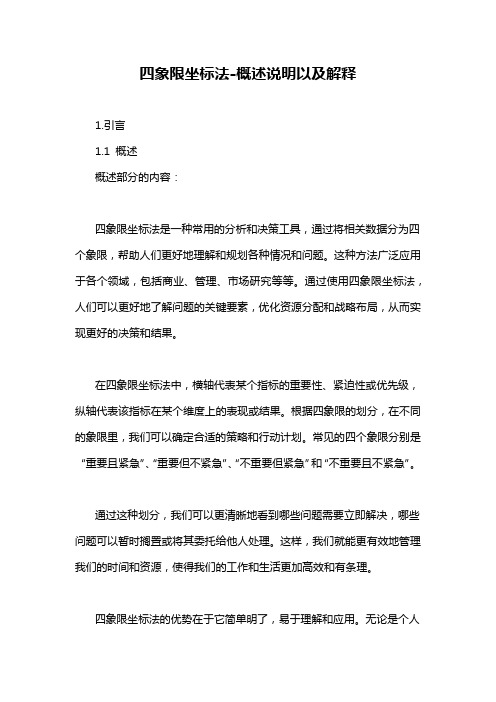
任务类型:紧急、重要
处理级别:优先级, 即刻做。
饱和后果:压力大增, 时间危机 紧急
不重要
第三象限
(二)第二象限任务类型、处理方式及饱和后果
重要
第二象限:任务类型:不紧急、重要的任务,处 第二象限
任务类型:不紧急、重要的任务
理级别:为次优先级。饱和后果,任务迁移至第一象限,
增加第一象限压力,时间危机。
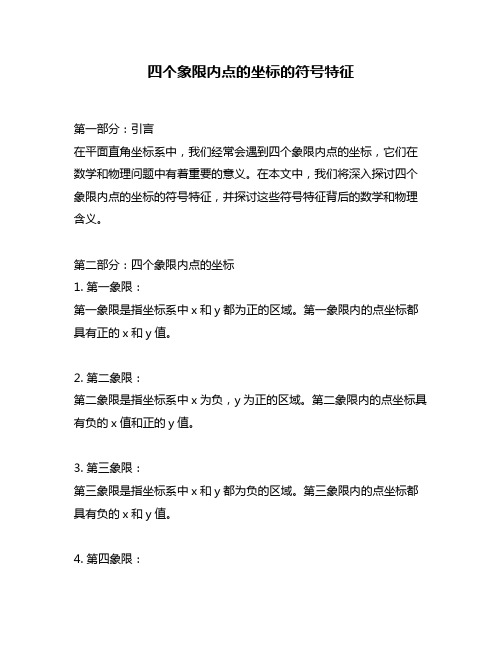
第三象限时间分配在5%~15%以内。 第四象限时间分配:时间控制在1%以内。
五、中职生高效的“四象限”法时间分配法
第二象限
重要
第一象限
时间分配:60%~85%
时间分配:10%~25%
不紧急 时间分配:控制在1%以内
紧急 时间分配:10%~15%
第四象限
不重要
第三象限
六、运用“四象限”法进行时间管理合理化建议
(一)第一象限任务类型、处 第二象限 理方式及饱和后果
第一象限:放置紧急、重要的 任务,并按照轻重缓急进行排序。 处理级别:最高优先级,即刻做。 饱和后果:压力大增,产生时间危 机。
不紧急
比如,中职生课前预习与复习 对知识的巩固非常重要,当天需要 训练的各种技能,因此对此象限里 的任务根据完成时限做完成计划, 估算好每个任务完成的时间。
第二象限
重要
不紧急 不紧急、不重要的任务
处理方式:学会拒绝
饱和后果:浪费时间、浪 费生命
第四象限
不重要
第一象限 紧急
第三象限
三、四象限任务类型、处理方式及饱和后果总图
四、“四象限”法时间管理如何有效提高时间利用率
由总图可知,第一象限和第二象限任务对中 职生来说非常重要,应把自己的大量时间花在这 两个象限的任务上。对于第三象限和第四象限的 任务对中职生来说不重要,因而在时间分配上尽 量压缩,压缩后的时间用来完成第一象限和第二 象限里的任务。
四象限坐标法-概述说明以及解释
四象限坐标法-概述说明以及解释1.引言1.1 概述概述部分的内容:四象限坐标法是一种常用的分析和决策工具,通过将相关数据分为四个象限,帮助人们更好地理解和规划各种情况和问题。
这种方法广泛应用于各个领域,包括商业、管理、市场研究等等。
通过使用四象限坐标法,人们可以更好地了解问题的关键要素,优化资源分配和战略布局,从而实现更好的决策和结果。
在四象限坐标法中,横轴代表某个指标的重要性、紧迫性或优先级,纵轴代表该指标在某个维度上的表现或结果。
根据四象限的划分,在不同的象限里,我们可以确定合适的策略和行动计划。
常见的四个象限分别是“重要且紧急”、“重要但不紧急”、“不重要但紧急”和“不重要且不紧急”。
通过这种划分,我们可以更清晰地看到哪些问题需要立即解决,哪些问题可以暂时搁置或将其委托给他人处理。
这样,我们就能更有效地管理我们的时间和资源,使得我们的工作和生活更加高效和有条理。
四象限坐标法的优势在于它简单明了,易于理解和应用。
无论是个人还是团队,都可以借助这种方法来进行分析和决策。
此外,四象限坐标法也有助于提高工作的灵活性和应变能力,帮助我们更好地应对突发事件和变化。
通过本文,我们将深入探讨四象限坐标法的应用领域和优势,并提出未来的发展方向。
我们相信,通过更好地理解和应用四象限坐标法,人们可以取得更好的个人和职业发展,为组织和社会创造更多的价值。
1.2 文章结构文章结构的主要目的是为了帮助读者更好地理解和组织文章的内容。
一个清晰的结构能够让读者更容易跟随你的思路,理解你的观点。
在这篇文章中,结构的主要部分包括引言、正文和结论三个部分。
引言部分是文章的开头,主要介绍文章的背景、目的和结构等内容。
通过概述引出四象限坐标法的概念,然后说明本文的结构和目的。
正文部分是文章的主体,包括什么是四象限坐标法、其应用领域以及其优势等内容。
可以通过对四象限坐标法的定义和原理进行解释,然后详细介绍四象限坐标法在各个领域的应用,以及其在这些领域中的优势和作用。
四个象限内点的坐标的符号特征
四个象限内点的坐标的符号特征第一部分:引言在平面直角坐标系中,我们经常会遇到四个象限内点的坐标,它们在数学和物理问题中有着重要的意义。
在本文中,我们将深入探讨四个象限内点的坐标的符号特征,并探讨这些符号特征背后的数学和物理含义。
第二部分:四个象限内点的坐标1. 第一象限:第一象限是指坐标系中x和y都为正的区域。
第一象限内的点坐标都具有正的x和y值。
2. 第二象限:第二象限是指坐标系中x为负,y为正的区域。
第二象限内的点坐标具有负的x值和正的y值。
3. 第三象限:第三象限是指坐标系中x和y都为负的区域。
第三象限内的点坐标都具有负的x和y值。
4. 第四象限:第四象限是指坐标系中x为正,y为负的区域。
第四象限内的点坐标具有正的x值和负的y值。
第三部分:符号特征的数学和物理含义这些符号特征在数学和物理问题中有着重要的意义。
在数学中,我们可以通过象限来确定函数值的正负性,进而推导不等式的解集。
在物理中,四个象限内的点的符号特征可以帮助我们确定向量的方向和大小,对于描述物体运动、力的作用等问题有着重要的应用。
第四部分:个人观点和理解我个人认为,四个象限内点的坐标的符号特征是数学和物理中基础而重要的概念。
它们在解决问题和推导结论中发挥着不可替代的作用,对于深入理解数学和物理问题有着重要的帮助。
总结:通过本文的讨论,我们深入探讨了四个象限内点的坐标的符号特征,并解释了这些符号特征在数学和物理中的重要意义。
希望通过阅读本文,您能够更全面、深刻和灵活地理解这一主题。
:在数学中,四个象限内点的坐标的符号特征不仅对于解决函数值的正负性和推导不等式的解集具有重要意义,还可应用于解决图形的对称性和方程的根的问题。
在代数和几何问题中,我们常常需要判断图形、函数或者方程的性质,而四个象限内点的坐标的符号特征可以为我们提供方便快捷的判断标准。
另外,在物理中,四个象限内点的坐标的符号特征也具有重要的应用。
以向量为例,它不仅可以描述物体的运动状态,还可以表示力的作用方向和大小。
四象限分析模型
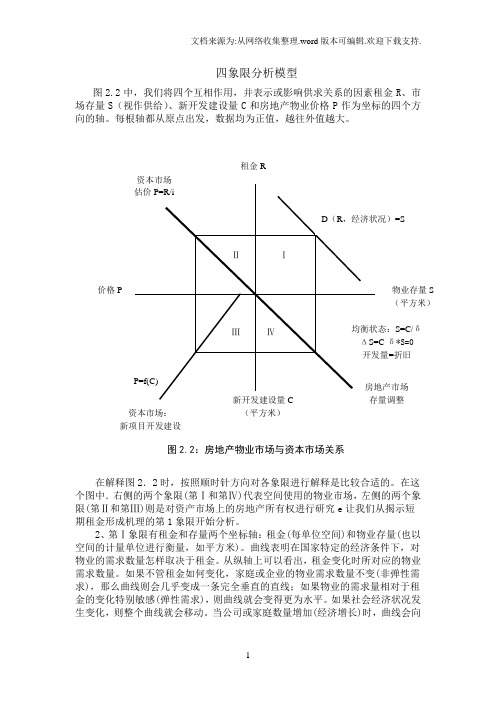
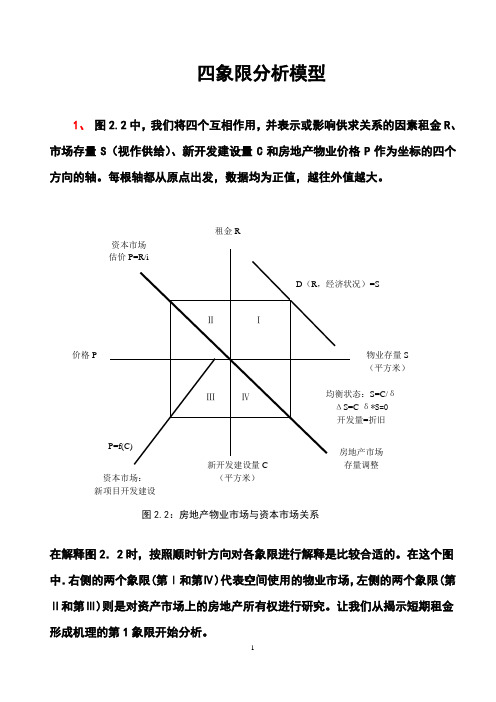
四象限分析模型图2.2中,我们将四个互相作用,并表示或影响供求关系的因素租金R、市场存量S(视作供给)、新开发建设量C和房地产物业价格P作为坐标的四个方向的轴。
每根轴都从原点出发,数据均为正值,越往外值越大。
在解释图2.2时,按照顺时针方向对各象限进行解释是比较合适的。
在这个图中.右侧的两个象限(第Ⅰ和第Ⅳ)代表空间使用的物业市场,左侧的两个象限(第Ⅱ和第Ⅲ)则是对资产市场上的房地产所有权进行研究e让我们从揭示短期租金形成机理的第1象限开始分析。
2、第Ⅰ象限有租金和存量两个坐标轴:租金(每单位空间)和物业存量(也以空间的计量单位进行衡量,如平方米)。
曲线表明在国家特定的经济条件下,对物业的需求数量怎样取决于租金。
从纵轴上可以看出,租金变化时所对应的物业需求数量。
如果不管租金如何变化,家庭或企业的物业需求数量不变(非弹性需求),那么曲线则会几乎变成一条完全垂直的直线;如果物业的需求量相对于租金的变化特别敏感(弹性需求),则曲线就会变得更为水平。
如果社会经济状况发生变化,则整个曲线就会移动。
当公司或家庭数量增加(经济增长)时,曲线会向上移动,表明在租金不变的情况下,物业需求会增加;当经济衰退时,曲线会向下移动,表明物业需求减少。
为了使物业需求量D和物业存量S达到平衡,必须确定适当的租金水平R,使需求量等于存量。
需求是租金R和经济状况的函数:D(R,经济状况)=S (2.1)如前所述.物业市场上的存量供给是由资产市场给定,因此,在图2.2中.对于横轴上的某一数量的物业存量,向上画一条垂直线与需求曲线相交,然后从交点再画一条水平线与纵轴相交,按照这种方法可以找出对应的租金标准.在使用物业的这种租金标准下.我们可以将注意力转移到第Ⅱ象限。
第Ⅱ象限代表了资产市场的第一部分,有租金和价格(每单位空间)两个坐标轴。
以原点作为起点的这条射线,其斜率代表了房地产资产的资本化率,即租金和价格的比值。
这是投资者愿意持有房地产资产的当前期望收益率。
坐标方位角和象限角的关系表-概述说明以及解释

坐标方位角和象限角的关系表-概述说明以及解释1.引言1.1 概述在几何学和数学中,坐标方位角和象限角是两个重要的概念。
坐标方位角是指向任意点在直角坐标系中与正向X 轴的夹角,通常用弧度或度数表示;而象限角是指一个角落在某一象限内的角度,从正向X 轴逆时针旋转而来,范围通常是0 到360。
本文将探讨坐标方位角与象限角之间的关系,分析它们在数学和几何中的重要性。
通过对这两个角度概念的深入研究,我们可以更好地理解空间中位置和方向的表示方式,并且在实际问题中进行角度计算和图形分析。
在本文的结论部分,我们将总结这两种角度概念的关系,提供一些应用举例并展望未来可能的研究方向。
通过本文的阅读,读者可以更全面地了解坐标方位角和象限角的关系,为进一步学习和研究奠定基础。
1.2文章结构1.2 文章结构本文主要分为引言、正文和结论三个部分。
在引言部分中,将对坐标方位角和象限角的概念进行概述,介绍本文的结构以及文章撰写的目的。
在正文部分中,将详细讨论坐标方位角的定义和范围,象限角的定义和性质,以及两者之间的关系。
在结论部分中,将对文章进行总结,提出相关的应用举例,并展望未来的研究方向。
通过这样的结构安排,读者可以系统地了解和掌握坐标方位角和象限角的知识,并进一步探讨其在实际问题中的应用和发展前景。
1.3 目的本文旨在探讨坐标方位角和象限角之间的关系,帮助读者更深入地理解这两个概念在数学中的应用和意义。
通过对坐标方位角和象限角的定义、范围以及性质进行详细分析,我们将揭示它们之间的联系,并探讨它们在解决实际问题中的应用。
通过本文的阐述,读者可以更好地理解和运用坐标方位角和象限角,从而提高数学解题的能力和水平。
通过具体的应用举例,我们将展示坐标方位角和象限角在实际问题中的运用,帮助读者更好地理解其实际意义。
最后,我们将展望未来研究的方向,为进一步深入研究和探讨坐标方位角和象限角的相关问题提供思路和指导。
通过本文的阐述,我们希望读者可以全面了解和掌握坐标方位角和象限角的知识,从而更好地运用于实际生活和学习中。
平面直角坐标系 点的分布 象限
平面直角坐标系点的分布象限【摘要】平面直角坐标系是数学中重要的概念,它将二维空间划分为四个象限。
在第一象限,所有坐标均为正数;第二象限为负x轴正y轴;第三象限为负数坐标;第四象限为正x轴负y轴。
在特殊情况下,点可能位于坐标轴上。
象限在几何学中具有重要作用,可帮助确定点的位置。
判断点所在象限的方法是根据坐标的正负情况进行判断。
经典案例分析如确定一个点的坐标,便可通过象限的概念来判断点所在的具体位置。
通过本文的介绍,读者可以更好地理解平面直角坐标系中点的分布情况及象限的概念,为进一步学习数学几何学提供基础。
【关键词】平面直角坐标系、点的分布、象限、第一象限、第二象限、第三象限、第四象限、特殊情况、象限的作用、点的象限判断方法、经典案例分析1. 引言1.1 平面直角坐标系的定义平面直角坐标系是二维空间中一种常用的坐标系统,用来描述点在平面上的位置。
在平面直角坐标系中,以两条相互垂直的直线(通常水平和垂直)为基准,确定了一个平面。
这两条直线分别称为x轴和y 轴,它们的交点被称为原点,通常用O表示。
对于平面直角坐标系中的任意一个点,可以用一个有序对(x, y)来表示,其中x表示该点在x轴上的坐标,y表示该点在y轴上的坐标。
根据这个有序对,就可以确定该点在平面上的位置。
平面直角坐标系中的点的分布具有一些特点,比如第一象限中的点都具有正的x坐标和y坐标,第二象限中的点具有负的x坐标和正的y坐标,依此类推。
象限的概念是用来描述平面直角坐标系中点的位置关系的重要概念,它将平面分成四个部分,每个部分称为一个象限。
通过平面直角坐标系,我们可以方便地描述点在平面上的位置,以及进行各种几何、代数等计算。
在接下来的正文和结论中,我们将进一步探讨象限的特点、作用以及点的象限判断方法。
1.2 点的分布特点点的分布特点是指在平面直角坐标系中,点的坐标位置具有一定规律性和特征。
根据坐标轴的划分,点的位置可以分布在四个象限中,分别为第一象限、第二象限、第三象限和第四象限。
四象限直流电动机 ppt课件

有限元法预备知识
16
四象限直流电动机的发展与应用
直流电动机以其优良的转矩特性在运动控制领域得到了广泛的应用, 但普通的直流电动机由于需要机械换相和电刷,可靠性差,需要经常维护; 换相时产生电磁干扰,噪声大,影响了直流电动机在控制系统中的进一步 应用。为了克服机械换相带来的缺点,以电子换相取代机械换相的无刷电 机应运而生。
有限元法预备知识
15
第三象限和第一象限过程相同,只不过电动转矩和旋转方向分 别相反。而第四象限和第二象限过程相同,也只不过是电动转矩和 旋转方向分别相反。
换向的时间问题
对于单象限的调速器,当电机需要反转时,要加时间继电器。 无论是改变励磁方向还是改变电枢方向,都必须等待一段时间,就 是说不允许工作中突然换向。因为励磁线圈和电枢线圈通的都是直 流电,需要时间来释放能量,如果换向太快将会把整流桥反向击穿。 而四象限的调速器不存在此问题,因为两组整流桥方向相反,当一 组停止输出时,另一组正好可以给电机释放能量。
有限元法预备知识
2
有限元法预备知识
3
直流电动机
有限元法预备知识
8 10 13
4
上图是一台直流电机的最简单模型。N和S是一对固定的磁极, 可以是电磁铁,也可以是永久磁铁。磁极之间有一个可以转动的铁 质圆柱体,称为电枢铁心。铁心表面固定一个用绝缘导体构成的电 枢线圈abcd,线圈的两端分别接到相互绝缘的两个半圆形铜片(换 向片)上,它们的组合在一起称为换向器,在每个半圆铜片上又分 别放置一个固定不动而与之滑动接触的电刷A和B,线圈abcd通过 换向器和电刷接通外电路。
有限元法预备知识
9
上图是带位能负载下降时的回馈制动机械特性,电动机电动运行带动 位能性负载下降,在电磁转矩和负载转矩的共同驱动下,转速沿特性 曲线1逐渐升高,进入回馈制动后将稳定运行在a点上。需要指出的是, 此时电枢回路不允许串入电阻,否则将会稳定运行在很高转速的b点 上。
64.四象限分析模型
四象限分析模型1、图2.2中,我们将四个互相作用,并表示或影响供求关系的因素租金R、市场存量S(视作供给)、新开发建设量C和房地产物业价格P作为坐标的四个方向的轴。
每根轴都从原点出发,数据均为正值,越往外值越大。
在解释图2.2时,按照顺时针方向对各象限进行解释是比较合适的。
在这个图中.右侧的两个象限(第Ⅰ和第Ⅳ)代表空间使用的物业市场,左侧的两个象限(第Ⅱ和第Ⅲ)则是对资产市场上的房地产所有权进行研究。
让我们从揭示短期租金形成机理的第1象限开始分析。
2、第Ⅰ象限有租金和存量两个坐标轴:租金(每单位空间)和物业存量(也以空间的计量单位进行衡量,如平方米)。
曲线表明在国家特定的经济条件下,对物业的需求数量怎样取决于租金。
从纵轴上可以看出,租金变化时所对应的物业需求数量。
如果不管租金如何变化,家庭或企业的物业需求数量不变(非弹性需求),那么曲线则会几乎变成一条完全垂直的直线;如果物业的需求量相对于租金的变化特别敏感(弹性需求),则曲线就会变得更为水平。
如果社会经济状况发生变化,则整个曲线就会移动。
当公司或家庭数量增加(经济增长)时,曲线会向上移动,表明在租金不变的情况下,物业需求会增加;当经济衰退时,曲线会向下移动,表明物业需求减少。
为了使物业需求量D和物业存量S达到平衡,必须确定适当的租金水平R,使需求量等于存量。
需求是租金R和经济状况的函数:D(R,经济状况)=S (2.1)如前所述.物业市场上的存量供给是由资产市场给定,因此,在图2.2中.对于横轴上的某一数量的物业存量,向上画一条垂直线与需求曲线相交,然后从交点再画一条水平线与纵轴相交,按照这种方法可以找出对应的租金标准.在使用物业的这种租金标准下.我们可以将注意力转移到第Ⅱ象限。
第Ⅱ象限代表了资产市场的第一部分,有租金和价格(每单位空间)两个坐标轴。
以原点作为起点的这条射线,其斜率代表了房地产资产的资本化率,即租金和价格的比值。
这是投资者愿意持有房地产资产的当前期望收益率。
电动机四象限运行

电机四象限运行1、什么是单象限和4象限?以电动机的转速为纵座标轴,以转矩为横座标轴建立的直角坐标系,用来描述电动机的四种运转状态,即正向电动,回馈发电制动,反接制动,以及反向电动四种运转状态.每一种状态的机械特性曲线分别在直角坐标系的四个象限.如果装置只能满足电动机的电动运转状态,那么它就是单象限的。
如果装置驱动在电动状态时,能够从电动状态进入第二象限运行,也能从电动状态进入第四象限运行,那么装置是四象限的。
单象限装置只能正向电动,或反向电动,不能从电动运行进入再生发电运行。
左半部是众所周知的可逆变频器原理图,各位同行一看便知。
而右半部分电机分别处于四象限运行的转矩方向和转速方向(也是旋转方向)图.现简单分析如下:当电机通常是处于处于第一象限运行,我们称其为正转(顺时针反向)电动状态,电动机通过变频器以不同的转速从电网吸收电能,并将其转换为机械能。
电动机的电动转矩和旋转反向一致,也是顺时针方向.负载机械转矩和电动机电动转矩相反,当电动转矩大于负载转矩时,电动机升速,当电动转矩等于负载转矩时,电机匀速运转。
当我们电机处于某一转速运行在第一象限运行时,当变频器的给定频率突然变小,不管变频器的减速参数如何设定,只要是频率下降减速度大于电动机带负载的惯性减速速率,那么电机由电动状态变为发电状态,它将机械动能通过逆变模块的续流二极管并由制动单元控制向制动电阻放电,将机械能通过制动电阻发热耗掉,这时电机运转方向仍为正转(顺时针),而电机的电动转矩方向和第一象限相反,也就是和转动方向相反(逆时针),电动机对机械负载起制动作用,使得电机运转减速度加快。
我们称其为发电能耗制动状态,如果具有回馈制动单元的话,它可以将机械能通过回馈制动单元向电网回馈.第三象限和第一象限过程相同,只不过电动转矩和旋转方向分别相反。
而第四象限和第二象限过程相同,也只不过是电动转矩和旋转方向分别相反。
2、关于控制器的象限和电机的象限:单象限:能量只能单向流动。
变频调速的四象限运行

变频调速的四象限运行张燕宾1 异步电动机的机械特性1.1 概述电力拖动系统就是电动机带动生产机械运动(大多数为旋转运动)的系统。
进一步说,则是电动机的电磁转矩克服了生产机械的阻转矩,把生产机械带动到一定转速的运行系统。
如图1所示,拖动系统主要由三大部分构成:图1 电力拖动系统的构成(1) 电动机是把电能转换成机械能的装置。
在拖动系统里,起原动机的作用。
(2) 生产机械是拖动系统的工作对象,如鼓风机、水泵、起重机械、机床等。
也是电动机的负载。
(3) 传动机构是把电动机输出的机械能传递给生产机械的装置。
在大多数情况下是一种减速装置,有时也能在一定范围内进行调速。
常见的传动机构如皮带、齿轮、联轴器等。
拖动系统的主要物理量是:(1) 转速n拖动系统的基本工况是由电动机带动生产机械以一定的速度运行。
因此,转速n是拖动系统的工作目的。
本文中,电动机输出轴上的转速用n M表示;生产机械输入轴上的转速用n L表示。
(2) 转矩T对于电动机,这是拖动系统得以转动的原因,是原动力。
由于电动机的转矩是由电流和磁场相互作用而产生的,故称为电磁转矩,用T M表示。
描绘转速n与转矩T之间的关系n=ƒ(T)是至关重要的,称之为机械特性。
在异步电动机内,电磁转矩的大小与电流和磁通量的乘积成正比:T M=K T I1Ф1cosö2 (1) 式中,K T为转矩常数;I1为定子电流;Ф1为每个磁极的磁通量;cosö2为转子电流的功率因数。
作为拖动生产机械的原动转矩,应该是电动机轴上的输出转矩。
是电磁转矩克服了电动机内部的磨擦损失和通风损失的结果。
但由于磨擦损失和通风损失都很小,为了简化分析的过程,常粗略地把异步电动机的电磁转矩直接看作是电动机轴上的输出转矩。
1.2 自然机械特性与速度变化电动机在没有人为地改变其参数时的机械特性,称为自然机械特性。
异步电动机的自然机械特性如图2所示。
其主要特征可由三个点来描述:图2 异步电动机的自然机械特性(1) 理想空载点(N0点)电动机输出轴上的转矩为0(T=0),称为理想空载。
电动机四象限运行

电机四象限运行1、什么是单象限和4象限?以电动机的转速为纵座标轴,以转矩为横座标轴建立的直角坐标系,用来描述电动机的四种运转状态,即正向电动,回馈发电制动,反接制动,以及反向电动四种运转状态。
每一种状态的机械特性曲线分别在直角坐标系的四个象限。
如果装置只能满足电动机的电动运转状态,那么它就是单象限的。
如果装置驱动在电动状态时,能够从电动状态进入第二象限运行,也能从电动状态进入第四象限运行,那么装置是四象限的。
单象限装置只能正向电动,或反向电动,不能从电动运行进入再生发电运行。
左半部是众所周知的可逆变频器原理图,各位同行一看便知。
而右半部分电机分别处于四象限运行的转矩方向和转速方向(也是旋转方向)图。
现简单分析如下:当电机通常是处于处于第一象限运行,我们称其为正转(顺时针反向)电动状态,电动机通过变频器以不同的转速从电网吸收电能,并将其转换为机械能。
电动机的电动转矩和旋转反向一致,也是顺时针方向。
负载机械转矩和电动机电动转矩相反,当电动转矩大于负载转矩时,电动机升速,当电动转矩等于负载转矩时,电机匀速运转。
当我们电机处于某一转速运行在第一象限运行时,当变频器的给定频率突然变小,不管变频器的减速参数如何设定,只要是频率下降减速度大于电动机带负载的惯性减速速率,那么电机由电动状态变为发电状态,它将机械动能通过逆变模块的续流二极管并由制动单元控制向制动电阻放电,将机械能通过制动电阻发热耗掉,这时电机运转方向仍为正转(顺时针),而电机的电动转矩方向和第一象限相反,也就是和转动方向相反(逆时针),电动机对机械负载起制动作用,使得电机运转减速度加快。
我们称其为发电能耗制动状态,如果具有回馈制动单元的话,它可以将机械能通过回馈制动单元向电网回馈。
第三象限和第一象限过程相同,只不过电动转矩和旋转方向分别相反。
而第四象限和第二象限过程相同,也只不过是电动转矩和旋转方向分别相反。
2、关于控制器的象限和电机的象限:单象限:能量只能单向流动。
平面直角坐标系课件

(-3,0)
(0,0)
(3,0)
x
(3,-3)
2、春天到了,初一某班组织同学到人民公园春游.张明、 王丽二位同学和其他同学走散了.同学们已经到了中心广
场,而他们仍在牡丹园赏花,他们对着景区示意图在电 话中向老师告知了他们的位置.
张明:“我这里的坐标是(300,300)”
王丽:“我这里的坐标是(200,30y0)”. y
图3-5
解 如图3-5,先在x 轴上找到表示5的点,再在y 轴 上找出表示4 的点,过这两个点分别作x 轴,y
轴的垂线,垂线的交点就是点A. 类似地,其他
各点的位置如图所示.点A 在第一象限,点B 在 第二象限,点C在第三象限,点D在第四象限.
图3-5
写出平面直角坐标系中的A、B、C、E、F、G、H、O、T
2叫做点A的纵坐B(标2,3) A点在平面内的坐标为(3, 2) 记作:A(3,2)
·
·A(3,2)
方法:先横后纵
-4 -3 -2 -1 0 -1
1 2 3 4 5 x 横轴
平面直角坐标系上-2的点和有序实数对一一对应
-3
D
-4
E
(-3,-3)
(5,-4)
笛卡尔,法国数学家、 科学家和哲学家.早在 1637年以前,他受到了 经纬度的启示.(地理上 的经纬度是以赤道和本 初子午线为标准的,这 两条线从局部上看可以 看成平面内互相垂直的 两条线.)发明了平面直 角坐标系,又称笛卡尔 坐标系.
我们把北偏西60°,南偏东60°这样的角称为方位角.
例4 如图3-10,12 时我渔政船在H 岛正南方向, 距H岛30海里的A 处,渔政船以每小时40 海 里的速度向东航行, 13 时到达B处,并测 得H 岛的方向是北偏西53°6′. 那么此时渔 政船相对于H岛的位置怎样描述呢?
四象限模型分析教学实例
四象限模型分析教学实例
四象限分析法是一种非常有意思的分析工具。
所谓象限,是平面直角坐标系(笛卡尔坐标系之一)中里的横轴和纵轴所划分的四个区域,每一个区域叫做一个象限。
形象一点来讲,就像一个田字形,四个格子就是四个象限。
说两个最经典的四象限分析:第一,科维的时间管理法。
横轴为“紧急-不紧急”,竖轴为“重要-不重要”,就把一个人的时间分配为四个部分:1.重要-紧急的,2.重要-不紧急的,3.不重要-紧急的,4.不重要-不紧急的。
第二,美国波士顿咨询集团的“波士顿矩阵”。
横轴为“市场增长率高和低”,竖轴为“市场占有率高和低”,把一个公司的所有产品分成四种:明星、现金奶牛、问号和瘦狗。
在无数的思维精细化工具中,四象限分析法的优势在于:第一,它是一种最简单易学,而实用性超强的工具。
第二,图形他的呈现思路,有助于思考更细致、深入、全面。
第三,应用广泛,工作生活的大事小情,都可以用它来进行分析。
学会四象限分析法,你的好处在于:第一,拓展思路。
就讲话而言,如果说我们打不开思路没话说,其实就是没有打开大脑的钥匙。
打开大脑的钥匙有很多把,而四象限分析法,是最好的钥匙之一。
第二,见解独到。
当你通过四象限把事物解剖之后,你对事物的看法将走出一般人。
第三,通俗易懂。
你通过四象限分析法分析某一看似复杂的问题,会让听者觉得一下子变得简单清晰。
四象限分析法在经济学、政治学、管理学、心理学等学科以及日常工作与生活场景中都有广泛的运用。
如果你作为一个有心人,不仅可以借鉴别人的经典分析,还可以自己创造出许多有趣而实用的四象限来。
四象限管理法则

时间“四象限”法是一种有效的时间管理方法,按照“重要”和“紧急”两个坐标进行划分,分为四个象限。
如下图:
第一象限是重要又紧急的事情。
例如,交通事故、突然发病、上级要求立即就得做的事情、活动现场调度与配合事宜、需要马上处理的客户投诉等需要尽快以最短最快的时间完成。
第二象限是重要但不紧急的事情。
例如:长期的规划、问题的发掘与预防、参加培训、建立人际关系、于家人相处的时间、锻炼身体、体格检查等。
这些,通常是可以暂时延缓的任务,从长远看,却是会产生重大后果的事情。
第三象限是也不紧急也不重要的事情。
例如:闲谈、上网、写博客、网络游戏等。
第四象限十紧急但不重要的事情。
例如:电话、会议、突然访客。
这一类的事情表面上容易与第一象限重要又紧急的事情相混淆,因为迫切的事情会让我们产生错觉,认为这件事很重要。
二者的区别就在于这件事是否有助于完成某种重要的目标,如果答案是否定的,便应归入第四象限。
处理原则:
若遇到第一象限的事务,即重要而紧急的工作,只能是放下手中的一切,全力去面对,这是不得已的;但平时,要把精力和时间集中放在第二象限,即处理重要但不紧急的工作上,这样可以防微杜渐,避免重要的事进入第一象限,变得紧急。
长期不得不面对第一象限的事情是一种煎熬。
而经常能有条不紊地处理第二象限的事情则是一种享受。
沉溺于第三象限的事,是无聊,要学习节制,节制是一种成为卓越必须具备的性格之一。
对于第四象限紧急但不重要的事情,首先要学会辨别,然后学会说“不”。
电机四象限运行
电机四象限运行1、什么是单象限和4象限?以电动机的转速为纵座标轴,以转矩为横座标轴建立的直角坐标系,用来描述电动机的四种运转状态,即正向电动,回馈发电制动,反接制动,以及反向电动四种运转状态。
每一种状态的机械特性曲线分别在直角坐标系的四个象限。
如果装置只能满足电动机的电动运转状态,那么它就是单象限的。
如果装置驱动在电动状态时,能够从电动状态进入第二象限运行,也能从电动状态进入第四象限运行,那么装置是四象限的。
单象限装置只能正向电动,或反向电动,不能从电动运行进入再生发电运行。
2、关于控制器的象限和电机的象限:单象限:能量只能单向流动。
四象限:能量可以双向流动。
电机和变频器都有自己的象限,不要搞混了。
*电机的单象限运行,指电机电动运行。
四象限指发电运行。
*变频器的单象限运行,指能量从电网进入变频器。
四象限指能量还可以回馈电网。
可能有这种情况:a.单象限运行的变频器带四象限运行的电机。
电机发电的能量提升了母线电压,或在制动单元消耗掉。
b.单象限的直流调速换向麻烦,需要改变励磁或电枢的正负来实现反转。
四象限的直流调速有两组整流桥,输出方向相反,正转时其中一组工作,反转时另一组工作。
需要注意的主要是换向的时间问题:对于单象限的调速器,当电机需要反转时,要加时间继电器。
无论是改变励磁方向还是改变电枢方向,都必须等待一段时间,就是说不允许工作中突然换向。
因为励磁线圈和电枢线圈通的都是直流电,需要时间来释放能量,如果换向太快将会把整流桥反向击穿。
而四象限的调速器不存在此问题,因为两组整流桥方向相反,当一组停止输出时,另一组正好可以给电机释放能量。
3、关于变频器和直流调速器的互换:从理论上讲,磁场矢量控制的交流电机变频装置,完全可替代直流调速系统,当然要实现4象限运行,IGBT和整流二极管都要反并联,以实现电流的反向。
电机也要求有速度反馈,如测速发电机或者码盘等,另外还要根据负载的特性,选择电动机的恒扭矩和恒功率的调速范围。
平面直角坐标系象限划分
平面直角坐标系象限划分一、第一象限第一象限是平面直角坐标系中的一个象限,它位于x轴和y轴的正方向,其中x轴上的点坐标大于0,y轴上的点坐标也大于0。
第一象限是一个非常重要的象限,它是数学中常见的坐标系区域之一。
在第一象限中,所有的点的x坐标和y坐标都是正数,这意味着第一象限是一个位于第一象限的区域。
在数学中,第一象限通常用来表示正数和正方向的概念。
例如,在数学中,我们常常使用第一象限来表示正数的概念,比如在数轴上表示正数的位置。
第一象限还有一些特殊的性质。
例如,在第一象限中,两个点的x 坐标和y坐标都是正数,那么这两个点之间的距离就是正数。
这是因为在第一象限中,两个点之间的距离可以使用勾股定理来计算,而勾股定理中的两个正数相加的结果也是正数。
在现实生活中,第一象限也有许多应用。
例如,在地理学中,我们常常使用第一象限来表示地球上的东经和北纬。
在这种情况下,东经是一个正数,北纬也是一个正数,它们的值都是大于0的。
二、第二象限第二象限是平面直角坐标系中的一个象限,它位于x轴的负方向和y轴的正方向。
在第二象限中,x轴上的点坐标小于0,y轴上的点坐标大于0。
第二象限也是一个重要的象限,它在数学中有着广泛的应用。
在第二象限中,所有的点的x坐标都是负数,而y坐标都是正数。
这意味着第二象限是一个位于第二象限的区域。
在数学中,第二象限常常用来表示负数和正方向的概念。
例如,在数轴上表示负数的位置时,我们常常使用第二象限来表示。
第二象限也有一些特殊的性质。
例如,在第二象限中,两个点的x 坐标是负数,y坐标是正数,那么这两个点之间的距离也是正数。
这是因为在第二象限中,两个点之间的距离可以使用勾股定理来计算,而勾股定理中的两个正数相加的结果也是正数。
在现实生活中,第二象限也有许多应用。
例如,在金融学中,我们常常使用第二象限来表示亏损和收入。
在这种情况下,亏损是一个负数,收入是一个正数,它们的值都是大于0的。
三、第三象限第三象限是平面直角坐标系中的一个象限,它位于x轴和y轴的负方向。
测量学中的坐标象限

测量学中的坐标象限在测量学中,坐标象限是指用于确定空间位置和方向的一种系统。
它是一种常见的工具,广泛应用于物理学、地理学、工程学等领域。
坐标象限可以帮助我们确定物体或者点在空间中的具体位置,并且可以提供关于方向的信息。
在本文中,我们将介绍测量学中的坐标象限的概念、特点以及应用。
1. 坐标象限的概念和表示方法1.1 概念坐标象限是一个二维平面上的四个区域,每个区域都有唯一的标识符。
通常情况下,我们使用罗马数字I、II、III和IV表示这四个象限。
每个象限都有一个原点,它是坐标轴的交叉点,通常表示为(0,0)。
坐标轴分为水平轴(X轴)和垂直轴(Y 轴),一个象限中的点由其在X轴和Y轴上的坐标表示。
1.2 表示方法在表示坐标象限时,我们使用二维坐标系。
其中,横轴表示X轴,纵轴表示Y 轴。
原点(0,0)位于横轴和纵轴交叉点,具有相对应的象限标识。
例如,在第一象限中,X轴和Y轴的值都是正数。
在第二、三、四象限中,X轴或Y轴的值是负数。
通过将特定点的坐标放置在坐标系中,我们可以确定该点所在的象限。
2. 坐标象限的特点2.1 单一性每个点在二维平面上只能属于一个象限。
根据点在X轴和Y轴上的坐标值,我们可以准确地确定其所在的象限。
例如,如果一个点的X坐标是正数,而Y坐标是负数,那么该点一定位于第四象限。
2.2 方向性坐标象限不仅提供点所在的位置,还提供了关于点的方向的信息。
根据象限的定义,第一象限中的点向右上方延伸,第二象限中的点向左上方延伸,第三象限中的点向左下方延伸,第四象限中的点向右下方延伸。
2.3 坐标轴划分坐标轴将二维平面分为四个象限。
在第一象限,X轴和Y轴的值都是正数;在第二象限,X轴的值是负数,Y轴的值是正数;在第三象限,X轴和Y轴的值都是负数;在第四象限,X轴的值是正数,Y轴的值是负数。
3. 坐标象限的应用3.1 几何定位在几何学中,坐标象限被广泛应用于图形的定位。
通过确定一个点在二维平面上的坐标,我们可以准确地确定图形的位置和方向。
测量坐标系的象限

测量坐标系的象限坐标系是数学中常用的一种几何工具,用来描述和定位平面或空间中的点。
而坐标系的象限则是坐标系划分的四个区域,每个象限都有其特定的属性和规律。
在测量学中,了解和运用坐标系的象限是非常重要的,因为它可以帮助我们准确测量和描述物体的位置和方向。
1. 第一象限第一象限位于坐标系的右上方,横轴(x轴)和纵轴(y轴)均为正值。
在第一象限中,x轴大于零,y轴也大于零。
这表示在该象限中,物体的x坐标和y坐标均为正数。
在测量学中,第一象限常用于描述和定位位于一个平面上的物体。
例如,在地图上定位一个城市或者标记一个特定地点,我们可以使用第一象限的坐标系。
2. 第二象限第二象限位于坐标系的左上方,横轴(x轴)为负值,纵轴(y轴)为正值。
在第二象限中,x轴小于零,y轴大于零。
这表示在该象限中,物体的x坐标为负数,而y坐标为正数。
在测量学中,第二象限常用于描述和定位位于平面上的逆时针方向的物体。
例如,在地图上标记一辆车从A点向B点的运动方向,我们可以使用第二象限的坐标系。
3. 第三象限第三象限位于坐标系的左下方,即横轴(x轴)和纵轴(y轴)均为负值。
在第三象限中,x轴小于零,y轴也小于零。
这表示在该象限中,物体的x坐标和y 坐标均为负数。
在测量学中,第三象限常用于描述和定位位于平面上的逆时针方向且偏下的物体。
例如,在地图上标记一个位置位于底部左侧的物体,我们可以使用第三象限的坐标系。
4. 第四象限第四象限位于坐标系的右下方,横轴(x轴)为正值,纵轴(y轴)为负值。
在第四象限中,x轴大于零,y轴小于零。
这表示在该象限中,物体的x坐标为正数,而y坐标为负数。
在测量学中,第四象限常用于描述和定位位于平面上的顺时针方向且偏下的物体。
例如,在地图上标记一个位置位于底部右侧的物体,我们可以使用第四象限的坐标系。
总结通过了解和运用坐标系的象限,我们可以准确地测量和描述物体的位置和方向。
第一象限常用于定位位于一个平面上的物体,第二象限常用于定位逆时针方向的物体,第三象限常用于定位逆时针方向且偏下的物体,第四象限常用于定位顺时针方向且偏下的物体。