毕业论文外文翻译-爬墙机器人
爬壁机械人运动和粘附的研究外文文献翻译、中英文翻译、外文翻译
外文资料翻译翻译资料名称(外文) A Survey of Climbing Robots:Locomotion and Adhesion翻译资料名称(中文) 爬壁机器人运动和粘附的研究院(系):机械工程系专业:机械设计制造及其自动化姓名:潘晨学号: 04111237指导教师:陈敏华完成日期:爬壁机械人运动和粘附的研究作者:Baeksuk Chu1, Kyungmo Jung1, Chang-Soo Han2 ,Daehie Hong1;关键词:机器人,爬壁,运动,粘附,工程应用摘要:爬壁机器人是机器人系统在2D或复杂的3D环境中移动,如墙壁,天花板,屋顶,几何结构以及适应各种类型的环境。
他们不仅将取代在危险环境中人工进行的危险任务,同时也提高运营效率,省去了昂贵的安装脚手架和人员成本。
爬壁机器人在自我维持他们的身体的同时,有不同的特点来适应二维和三维表面类型,左右移动,并配有适当的工具和传感器来完成工作。
因此,设计一个爬壁机器人最重要的标准是有适当的运动的设计和适应特定环境要求的粘附机理。
在这篇文章中,将会介绍爬壁机器人的简要概述以及和具有综合运动和黏附的分析的适当的爬壁机械人的例子。
同时,从适用范围进行考虑提出了爬壁机械人可运用在从建造工业行业的清洁任务到生物医学服务行业。
1、介绍作为一种特殊的移动机器人,爬壁机器人是指能在二维或三维复杂环境中移动的机器人系统如墙壁,天花板,屋顶,几何结构以及适应各种类型的环境。
爬壁机器人是一个非常有吸引力的研究课题,由于工作位置的困难环境不便于人们触及和工作的不安全隐患,大量的问题是人类操作员不能直接执行的。
因此,爬壁机器人可以是一个很好的替代方案,可以提高经营效率,保护工作者的人身安全,并且在从以下危险任务中可以保障工作者的安全:高层建筑的清洗和检查工作,核电厂储罐及石化设备的诊断工作,船体的焊接和维修工作,等等。
相比其他的移动机器人,通过轮子或者腿在地面上移动,爬壁机器人具有通过维持身体从而抵抗重力而在3D环境中移动的独特的特点。
机械 机器人 外文文献 英文文献 墙壁清理器 可实现角落清理的移动装置的方案
WallWalker: Proposal of LocomotionMechanism Cleaning Evenat the CornerT. Miyake1 2 and H. Ishihara11 Kagawa Univ. Japan2 MIRAIKIKAI Inc., JapanAbstract. The purpose of this research is to develop the window cleaning robot forcleaning a single large windowpane such as a show window. It requires the followingdemands to apply the window cleaning robot for the practical use:1. Clean the corner of window because fouling is left there often.2. Sweep the windowpane continuously to prevent making striped patterns on awindowpane.The keys of mechanisms are the rotatability of the mobile part around the otherparts and the continuous locomotion in order to achieve the above points. The formerenables the robot to change the direction with keeping its position and attitude at thecorner of window. The latter is necessary for preventing leaving the striped patternon a windowpane. We designed the continuous motion using two-wheel locomotionwith adhering on the windowpane using a suction cup.The size of prototype is about 300mm × 300mm × 100mm and its weight isabout 2 kg without batteries. As the results of basic experiments of the prototype ona vertical smooth window glass, traveling velocity of going up direction was 0.08 m/s,one of going down direction was 0.14 m/s and horizontal direction was 0.11 m/s.In this paper the 1st chapter mentions background and objectives of this research,and also introduces the concept of WallWalker. The 2nd chapter discussesthe adhering and moving mechanism. The 3rd chapter illustrates its basic propertiesbased on the experiments. Finally, problems and future works are discussed in the4th chapter.1 IntroductionRecently, we have had many requests for the automatic cleaning of outsidesurface of buildings. Some customized window cleaning machines have alreadybeen installed into the practical use in the field of building maintenance.However, almost of them are mounted on the building from the beginning and they needs very expensive costs. Therefore, requirementsfor small, lightweight and portable window cleaning robot are also growing in the field of buildingmaintenance.As the results of surveying the requirements for the window cleaning robotby the field research with the cleaning companies, the following points arenecessary for providing the window cleaning robot for practical use:1. It should be small size and lightweight for carried by one person to everywhere.2. Clean the corner of window because fouling is left there often.3. Sweep the windowpane continuously to prevent making striped pattern ona windowpane.The locomotion mechanism must be chosen to satisfy these demands, especially later two subjects. Here locomotion mechanism means the combinationof adhering mechanism, traveling mechanism and a mechanism for changinga traveling direction.Various researches of locomotion mechanisms on wall climbing robots have been reported [1–5]. However they do not adapt to above three points completely.For example, climbing robot by legged-wall walking can not realizethe continuous movement, and also its turn-ability is low [6].We focused on the application of the window cleaning robot on a singlewindowpane. It is apparently necessary to cross over the window frame orjoint line to use it at any window, but the single windowpanes like as a showwindow also exist as an important application.According to such considerations, we adopted the two-wheel locomotion mechanism with adhering by a suction cup. This paper mainly deals with this mechanism and functions specialized in cleaning the corner of window.First requirement brought the following specifications for designing thewindow cleaning robot.– Weight: 5 kg, including the weight of battery and washing water,– Size: 300mm × 300mm × 100 mm.These are also defined by the results of surveying the demands from thecleaning companies.This paper proposes the small, light and portable window cleaning robot named WallWalker, which are designed to satisfy the market demands as mentioned above. Figure 1 is the rendering at a scene of practical use of WallWalker. The WallWalker is adhering on a windowpane and cleaning as moving on large windows.This paper discusses the effectiveness of proposed locomotion mechanism. The 2nd chapter discusses the locomotion mechanisms and illustrates the prototype for testing the proposed locomotion mechanism. The 3rd chapter illustrates its basic properties based on theexperiments.Fig. 1. Small-size window cleaning robot on a window2 Locomotion MechanismVarious researches of locomotion mechanisms on the window cleaning robots have been reported. However they do not meet our specifications defined based on the market demands above-mentioned. For example, climbing robot by legged-walk cannot realize the continuous movement, and also its turn-ability is low [6]. Climbing robot using crawler mechanism allows continuous movement, but the rotatability is as low as or lower than the leggedwalk [7]. Window cleaning robot by crawler mechanism had been developed (Size: 440×400×180mm Weight: 6.5 kg maximum speed 2 cm/sec) by Shraftet al. [8]. It must bring its own crawler up from the adhering surface and rotate it in order to change its traveling direction. This mechanism needs strong adhering force to hold the whole system on the vertical plane with lifting the mobile mechanism, and also it takes a long timeto finish the process of changing its front.Both of Legged-Walk and Crawler mechanism need the complicated structures, and therefore it is difficult to lighten and downsize it.According to such considerations, we adopted the two-wheel locomotion mechanism with adhering by suction cup. Figure 2 shows conceptual structure of WallWalker, which includes two driving wheels, a suction cup put in the center of robot, an air regulator, a small vacuum pump, some electronic circuits and some cleaning units. This chapter deals with the details of structures and the prototype designed for testing the proposed mechanism.2.1 Traveling MechanismWallWalker moves on windowpane by two wheels with holing the body on the surface using a suction cup. The most important point in the mechanism isFig. 2. Overview of small-size window cleaning robotthe friction coefficient of suction cup and tire against the adhering surface, e.g. high friction between the tire and the surface of window transmits the torque, and low friction between the suction cup and the surface of window. It achieves to move the robot with holding the body on the window. We selected PTFE (Polytetrafluoroethylene) for the materials of surface of a suction cup, and silicon rubber for the material of tires.2.2 Turning MechanismTurning mechanism is a key to clean even at the corner of window. Figure 3 shows the scenes that the robot changes its traveling direction at the corner. Figure 3(a) shows a usual turning way like as turning of motorcars. In this case, since the robot changes a direction as tracing an arc, it can not reach the end of corner of window. It needs the complicated process as follows to cleanthe corner by such robot: first, the robot goes into a corner, next it moves back the distance to turn, then it changes its direction as tracing an arc. In case that the robot can change its direction at the end of corner as shown in Fig. 3(b), the robot can clean a corner easily and rapidly. Round-shape robot is easily able to turn at the corner, but it unable to reach the end of corner. On the other hand, a quadrangular robot can clean to the end of corner, but never turn itself there.To get a function to change direction as shown in Fig. 3(b), we designed the mechanism that a mobile unit and a cleaning part are rotatably connected at the center shaft as shown in Fig. 2. Proposed mechanism consists of an adhering part, a cleaning part and a mobile part. The adhering part is constructed of a suction cup covered with PTFE and a vacuum pump. The(a)Conventional turning strategy(b)Novel turning strategy, which enables to clean a cornerFig. 3. Turning mechanism at a window Cornercleaning part is fixed to the adhering part. The mobile part uses two-wheel driving mechanism and is connected to the center shaft of the adhering part with suspension springs.2.3 Suspension MechanismIt is very important to press the tires on the adhering surface with the force enough to generate the friction to move itself. Because the suction cup deforms its own shape by the condition of vacuum such as a vacuum pressure, it is impossible to calculate the posture of robot against the adhering surface initially. That is, the force that the tire is pushed on the adhering plane mustbe adjustable to the adhering force.WallWalker is introduced suspension springs into as an adjusting mechanism. They are placed between the mobile part and the adhering part, and enable to touch the tires on the adhering plane with a suitable force for the generating the friction.2.4 Prototype of Locomotion MechanismFigure 4 shows the photograph of prototype developed to test the proposed turning mechanism. The size of prototype is about 300mm × 300mm × 100mm and its weight is about 2 kg without batteries. The chassis that is made of aluminum alloy is formed square, and its inner area is hollowed to rotate mobile part at changing traveling direction. This contains two DC motors, suspension mechanism, a vacuum pump (−23 kPa) a suction cup which diameter is 150 mm, an air regulator and some electronic circuits. This robot is currently controlled from outside via cables and electric energy is also supplied by a power strip.Fig. 4. Developed prototype3 Experimental ResultsAt first the basic properties on a vertical smooth window glass have been tested. As the experimental results, traveling speed of going up direction was 0.08 m/s, one of going down direction was 0.14 m/s and horizontal direction was 0.11m/s (Fig. 5). Also, the robot kept its body on the window stably and did not fall down during moving. These results proved its basic performancesatisfies the specifications defined based on the field surveying.Next, rotatability of prototype at the corner of window was confirmed by the experiment. Figure 6 shows sequential photographs when the prototype turns at the corner using turning mechanism proposed in this paper. As shown by these photographs, it was verified that the prototype can change its traveling direction at rights smoothly.(a)Prototype is climbing up a window (b) Back side of prototypeFig. 5. Mobility measuring of prototypeFig. 6. Test of rotatability of prototype at the corner of window4 ConclusionProposed WallWalker, which provides the continuous motion on the vertical indowpane and rotatability that the robot can change its traveling direction t the corner of window, was designed for cleaning the end of corner of window. In order to verify the basic properties about above abilities, the prototype was eveloped. Those results proved that the prototype fill the basic requirements entioned in 1st chapter.As the next development, the installations of control system and cleaning nit are planed. Sensors such as the posture sensor, e.g. gyro sensor, will be ounted and control scheme will be developed. Finally, the cleaning be tested with some cleaning units. AcknowledgementsThis research was supported by Foundation of Nankai-Ikueikai, Takamatsu, Japan. We greatly appreciate their support and encouragement.墙壁清理器:可实现角落清理的移动装置的方案T.Miyake,H.Ishihara 著许璠译摘要:本次研究的目的是为了开发一种能清洗窗口的机器人,用于清洗一个大玻璃窗,如清洗一个展览窗。
爬墙机器人外文翻译
The development trend of the robot1. Preface:Climbing robot is an important branch in the field of mobile robot, flexible mobile on vertical wall, replace artificial under the condition of the limit to complete various tasks, is one of the hotspot in research of the robot. It is mainly used in the nuclear industry, petrochemical industry, shipbuilding, fire departments and investigation activities, such as the building external wall cleaning, material storage tank in petrochemical enterprise testing and maintenance, the outer wall of large steel plate spray paint, and in building accident rescue and relief, etc., and achieved good social benefits and economic benefits, has wide development prospects.After 30 years of development, the field of robot which has emerged a large number of fruitful results, especially since the 1990 s, especially rapid development in the field of climbing robot at home and abroad. In recent years, due to the development of a variety of new technology, the robot which solved many technical challenges, greatly promote the development of the climbing robot. The robot design activities of universities in our country also has a wide development, this kind of atmosphere for our robot research and development of special and professional talents' cultivation is of positive significance.2. Climbing robot research status abroad1966 Japanese professor west light wall mobile robot prototype is developed for the first time, and performance success in Osaka prefecture university. This is a kind of rely on negative pressure adsorption climbing robot. Then appeared various types of climbing robot, has already begun to the late 80 s application in the production. Japan's most rapid development in the development of climbing robot, mainly used in the construction industry and nuclear industry. Such as: Japan shimizu construction company has developed with the outer wall of the building industry coating with ceramic tile of the robot, they developed by negative pressure adsorption cleaning climbing robot, on the surface of the glass for the Canadian embassy to clean. Tokyo university of technology development of the wireless remote control magnetic adsorption climbing robot. In Japan's miti "limit homework robot" national research projects, supported by day CDH, developed a large pot of negative pressure adsorption surface inspection robots used in nuclear power plants, etc.Other countries are also added to the climbing robot research upsurge, such as: Seattle Henry R Seemann under the funding of the Boeing company developed a vacuum adsorption crawler "AutoCrawler" robot. On the two tracks each containing a number of small adsorption chamber, with the moving of the crawler, adsorption chamber form continuous vacuum cavity and makes the crawler walking against thewall. American CaseWestern Reserve University developed by using four climbing robot prototype "legs". Similar to the first two robots, the robot depends on four "legs" on biomimetic viscous materials to adsorption, the prototype is the four legs wheel on the sole of the foot even special distribution is more advantageous to the robot stable crawling on the wall. The quality of the robot is only 87 g. Polytechnic school in the early 1990 s, British Portsmouth has developed a climbing robot multilegged walking type. Adopting modular design, the robot is composed of two similar modules, each module includes two mechanical legs and leg controller. According to the task need to install a different number of legs, reconfigurable ability. Mechanical legs using bionics mechanism, simulation of the large animals arm muscle function, is two type, including upper and lower two and three double-acting cylinder, with three degrees of freedom. Good stability and bearing capacity is big, the robot's lightweight, and can span bigger obstacles. In addition to the leg on one end of vacuum cups, robot equipped with suction cups, abdomen mass ratio of powder and make the robot has a larger load of 2:1.3. Climbing robot research status in ChinaChina is also in a similar study since the 1990 s. In 1988 at the national "863" high technology program, under the support of the robotics institute of Harbin institute of technology has successfully developed the use of magnetic adsorption and vacuum adsorption twoseries of five types of wall climbing robot. Successful development of the our country the first wall climbing robot remote detection, using negative pressure adsorption, omni-directional mobile wheel, used for nuclear waste storage jars of wall weld defect detection. Developed in 1994 for tall buildings wall climbing robot cleaning CLR - Ⅰ, adopts the omni-directional mobile mechanism, the robot in situ can arbitrarily change the direction of movement. After the development of the CLR - Ⅱ, driven by two independent ways -- coaxial two-wheeled differential mechanism, through the coordination of two rounds of speed control to realize the omni-directional mobile robot, the robot ontology and using power line carrier communication methods between the ground control station. Above-mentioned three climbing machine adopts single suction cup structure, spring air sealed, ensure the crawl robot with high speed and reliable adhesion ability. In 1995 successfully developed the metal corrosion by magnetic adsorption climbing robot, structure of permanent magnetic adsorption, accomplished by two tracks positive &negative mobile turn. The robot can do for petrochemical enterprises to the outer wall of the metal material storage tank to spray paint, sandblasting, as well as with automatic detection system to test the tank wall thickness. Developed in 1997's detection of water wall climbing robot, a circular permanent magnet adsorption block in conformity with the tank wall arc, improve the adsorption capacity, and improve theefficiency of the operation. Shanghai university also conducted early tall wall cleaning robot research, successively developed a vertical wall climbing robot and spherical wall climbing robot. The spherical wall climbing robot adopts many suckers, negative pressure adsorption, 6 foot independent driving leg feet walking style, can be used for different radius of curvature of the spherical outer wall since 1996, the Beijing university of aeronautics and astronautics has successfully developed WASH2 MAN, CLEANBOT 1, SKYCLEAN, "hanging basket type window robot" and "LanTianJie treasure" curtain wall cleaning robot prototype. For all the window is brushed pneumatic robot; Hanging basket type cleaning robot, the robot depends on the roof of the safety line traction, attached with the negative pressure made by fan robot on the wall in the application background of national grand theatre ellipsoid ceiling cleaning developed suitable for complex curved surface from climbing robot prototype, the climbing mechanism, mobile mechanism, cleaning robot has many similarities, but due to its special working environment and mission requirements, in terms of theory and technology has some particularity.4. The key technology of robot:4.1 adsorption mechanism, adsorption mechanism of action is to produce an upward force to balance the gravity of the robot, keep it on the wall. Currently, magnetic adsorption methods mainly include vacuumnegative pressure adsorption, adsorption, propeller thrust and binder etc. Several ways. Due to the adsorption methods each have limitations, climbing robot developed by often targeted strong, applies only to a specific task, difficult to generalize. Robot design need to work on task, environment, choose the right means of adsorption. In recent years, people through the study of the adsorption mechanism of gecko reptiles such as the soles of your feet, making the polymer synthesis of viscous material, the use of van der Waals force between the molecules and molecular materials, can be obtained on the contact area of small huge adsorption capacity, and has the advantages of adsorption has nothing to do with the surface material properties. Short life but at the moment, the use of these materials, the use of a certain number of times after lose viscosity, practical, need further study.4.2 mobile mechanism and motion control system: mobile mechanism and the movement control system of robot which major wheeled mobile mechanism, more foot type, such as caterpillar, among them, the wheel and foot type which has been widely used, caterpillar much for magnetic adsorption method. Obstacle ability is wall robot which used to an important indicator of performance. When work surface is convex, groove, the robot to go through these obstacles, we must have enough obstacle ability. All kinds of mobile mechanism, more foot type robot obstacle-navigation ability is stronger, its each leg smallsuction cup is placed, when faced with obstacles, can control the "leg", make the small suction cup across the obstacles one by one. Wall mobile mechanism of the robot can make the robot on the premise of reliable adsorption can move on the wall. Due to the particularity of climbing robot working in wall, mobile mechanism and adsorption mechanism exists coupling, which brought some difficulties to the robot's motion control. Than climbing robot sucker foot type and legs with a suction cup at the end, every move a leg needs to be done "to eliminate suction - leg - Wallace leg, left leg - generate adsorption force" a series of actions. In this process, the robot mobile mechanism of the action should coordinate with each other, and the adsorption mechanism to to guarantee the flexible mobile robot on the wall. In addition, there is also a mobile mechanism and adsorption separation, such as single suction cups, robot sucker adsorption, sustainable continuous movement of driving wheel mobile robot, motion control is relatively simple.Energy supply and drive mode: 4.3 the driving mode of energy supply and energy supply way with people via the wire line for the machine to provide energy such as electricity, gas, also has a built-in battery, cylinders and so on. Drive ways mainly have the pneumatic motor and other several ways. Climbing robot is designed to adopt high efficiency quality than drive and source of power, especially the wireless control cases. Using motor drive, energy supply mainly include polymerlithium battery, nickel metal hydride batteries, electrochemical batteries and fuel cells. In addition, due to the energy of internal combustion engine - - gasoline, hydrogen fuel can have higher weight ratio, such as advanced micro internal combustion engine can also be applied to the climbing robot.Safety problems: 4.4 the robot by interference, environmental change circumstances, how to ensure the safety of the robot is attached to the wall without falling, falling or after how to minimize the damage of the robot. The past buildings cleaning climbing robot, developed by most used by in carrying the car at the top of the tower, hoisting and wire rope of insurance system on the robot. Robot for some other purposes, such as detection with small climbing robot, the goal is not sure, cannot use the rope way of insurance, so need to study new way to prevent falling. Could consider using a parachute, small power into a pulp, fast supporting resistance drop plate, etc., these may be a future development direction of climbing robot safety measures.5. Development trend of the robotHard drive, sensor and control the development of software technology has greatly promoted the development of climbing robot technology, the demand of the practical application is also put forward the challenge, the development of robot climbing robot development trend in the aggregate, basically has the following several aspects. (1) thedevelopment of new adsorption technology. Adsorption technology has been a bottleneck of the development of the robot, it determines the application range of the robot. (2) the task of robot from simplification to muti_function change direction. The past most climbing robot which is used for washing, spraying, detection and so on homework, homework tasks are often confined to a single task. Now people want climbing robot can equipped with a variety of tools, are working on different occasions. (3) the miniaturization, micromation is currently the trend of the development of the robot. On the premise of meet the functional requirements, small volume, light quality of robot can be less energy consumption, high flexibility, and in some special occasions are also need robot with small volume. (4) by the mooring operation development to the direction of untethered. Because the robot working space is generally larger, mooring operation greatly limits the robot working space, so, in order to improve the flexibility of robot and expand the working space, no cable is changed and is now and the future development trend of the robot. (5) by simple remote monitoring to intelligent direction. Combined with artificial intelligence, the robot can in a closed environment has a certain capacity for independent decision and complete the task, and have ego to protect ability, is the important direction of mobile robot, is also a important development direction of mobile robot climbing wall. (6) the adaptability of the reconfigurablerobot is an important indicator. In order to make the robots could be used in different occasions, according to the mission requirements, under the condition of the system does not need to design, make full use of existing robot system, should make with reconfigurable robot, which has a modular structure. According to the mission requirements, the need of module is directly connected to form a new robot.译文:1.引言:爬壁机器人是移动机器人领域的一个重要分支,可在垂直壁面上灵活移动,代替人工在极限条件下完成多种作业任务,是当前机器人领域研究的热点之一。
机器人自动寻迹控制系统-外文翻译【范本模板】
南京理工大学毕业设计(论文)外文资料翻译学院(系):机械工程学院专业:机械工程及其自动化姓名:陆建学号:0701500122外文出处:IEEE/IEE Electronic(用外文写)library(IEL)附件:1。
外文资料翻译译文;2.外文原文。
注:请将该封面与附件装订成册。
附件1:外文资料翻译译文导电胶粘剂机器人—一种新型,健壮,电力可控制附着技术的爬墙机器人Harsha Prahlad, Ron Pelrine,Scott Stanford,John Marlow, and Roy Kornbluh摘要本文介绍了一种新型夹紧称为兼容电胶合技术,同时也是第一次将这种技术应用于爬墙机器人.正如其名称所示电胶合是一种电气控制粘连技术,它涉及到采用电源连接到适合机器人移动的顺滑板来诱导墙体表面的静电荷。
立足于移动机人,夹紧力高(1平方厘米的夹紧表面承受0.2-1.4牛顿的力,力的具体大小取决于基板)已经在各种各样的常见的建筑基质中得到证实,无论是在粗糙还是光滑抑或是导电体还是绝缘体中都得到证实,与传统的粘合剂或干燥粘合剂不同,它可以为了符合流动性或配合清洗而被调制或关掉,该技术利用数量非常小的力量(大约20微瓦/牛顿的承受力量)并且展示了能重复地夹在有大量灰尘或其他杂物覆盖在基板的墙中的能力,通过使用这项技术,国际斯坦福研究所展示了各种各样的爬墙机器人包括跟踪和腿机器人。
I 引言最近的事件,诸如自然灾害,军事行动,或公众安全的威胁,强大的侦察机器人已经得到越来越多的重视,而能在三维空间里穿越地形复杂的城市的机器人更加受到重视。
创新地机器人具有良好的净空能力,通常使用很多模式的移动,如轮式或跟踪运动,腿运动,跳跃运动的机器人。
然而,它的攀爬或者停在垂直的表面建筑物及其他设施的能力,对其在军事用途提供了独特的应用空间.如城市侦察,传感器部署,建立城市网络节点,以及在民事搜索和救援行动.其垂直机动性和在高处栖息方面的能力也有众多的商业应用,如管道和槽罐检查或访问够不着的场合,如窗口区域清洁。
爬壁机器人设计毕业论文

毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
机器人外文文献翻译、中英文翻译
机器⼈外⽂⽂献翻译、中英⽂翻译外⽂资料robotThe industrial robot is a tool that is used in the manufacturing environment to increase productivity. It can be used to do routine and tedious assembly line jobs,or it can perform jobs that might be hazardous to the human worker . For example ,one of the first industrial robot was used to replace the nuclear fuel rods in nuclear power plants. A human doing this job might be exposed to harmful amounts of radiation. The industrial robot can also operate on the assembly line,putting together small components,such as placing electronic components on a printed circuit board. Thus,the human worker can be relieved of the routine operation of this tedious task. Robots can also be programmed to defuse bombs,to serve the handicapped,and to perform functions in numerous applications in our society.The robot can be thought of as a machine that will move an end-of-tool ,sensor ,and/or gripper to a preprogrammed location. When the robot arrives at this location,it will perform some sort of task .This task could bewelding,sealing,machine loading ,machine unloading,or a host of assembly jobs. Generally,this work can be accomplished without the involvement of a human being,except for programming and for turning the system on and off. The basic terminology of robotic systems is introduced in the following:1. A robot is a reprogrammable ,multifunctional manipulator designed to move parts,material,tool,or special devices through variable programmed motions for the performance of a variety of different task. This basic definition leads to other definitions,presented in the following paragraphs,that give acomplete picture of a robotic system.2. Preprogrammed locations are paths that the robot must follow to accomplish work,At some of these locations,the robot will stop and perform some operation ,such as assembly of parts,spray painting ,or welding .These preprogrammed locations are stored in the robot’s memory and are recalled later for continuousoperation.Furthermore,these preprogrammed locations,as well as other program data,can be changed later as the work requirements change.Thus,with regard to this programming feature,an industrial robot is very much like a computer,where data can be stoned and later recalled and edited.3. The manipulator is the arm of the robot .It allows the robot to bend,reach,and twist.This movement is provided by the manipulator’s axes,also called the degrees of freedom of the robot .A robot can have from 3 to 16 axes.The term degrees of freedom will always relate to the number of axes found on a robot.4. The tooling and frippers are not part the robotic system itself;rather,they are attachments that fit on the end of the robot’s arm. These attachments connected to the end of the robot’s arm allow the robot to lift parts,spot-weld ,paint,arc-weld,drill,deburr,and do a variety of tasks,depending on what is required of the robot.5. The robotic system can control the work cell of the operating robot.The work cell of the robot is the total environment in which the robot must perform itstask.Included within this cell may be the controller ,the robot manipulator ,a work table ,safety features,or a conveyor.All the equipment that is required in order for the robot to do its job is included in the work cell .In addition,signals from outside devices can communicate with the robot to tell the robot when it should parts,pick up parts,or unload parts to a conveyor.The robotic system has three basic components: the manipulator,the controller,and the power source.A.ManipulatorThe manipulator ,which does the physical work of the robotic system,consists of two sections:the mechanical section and the attached appendage.The manipulator also has a base to which the appendages are attached.Fig.1 illustrates the connectionof the base and the appendage of a robot.图1.Basic components of a robot’s manipulatorThe base of the manipulator is usually fixed to the floor of the work area. Sometimes,though,the base may be movable. In this case,the base is attached to either a rail or a track,allowing the manipulator to be moved from one location to anther.As mentioned previously ,the appendage extends from the base of the robot. The appendage is the arm of the robot. It can be either a straight ,movable arm or a jointed arm. The jointed arm is also known as an articulated arm.The appendages of the robot manipulator give the manipulator its various axes of motion. These axes are attached to a fixed base ,which,in turn,is secured to a mounting. This mounting ensures that the manipulator will in one location.At the end of the arm ,a wrist(see Fig 2)is connected. The wrist is made up of additional axes and a wrist flange. The wrist flange allows the robot user to connect different tooling to the wrist for different jobs.图2.Elements of a work cell from the topThe manipulator’s axes allow it to perform work within a certain area. The area is called the work cell of the robot ,and its size corresponds to the size of the manipulator.(Fid2)illustrates the work cell of a typical assembly ro bot.As the robot’s physical size increases,the size of the work cell must also increase.The movement of the manipulator is controlled by actuator,or drive systems.The actuator,or drive systems,allows the various axes to move within the work cell. The drive system can use electric,hydraulic,or pneumatic power.The energy developed by the drive system is converted to mechanical power by various mechanical power systems.The drive systems are coupled through mechanical linkages.These linkages,in turn,drive the different axes of the robot.The mechanical linkages may be composed of chain,gear,and ball screws.B.ControllerThe controller in the robotic system is the heart of the operation .The controller stores preprogrammed information for later recall,controls peripheral devices,and communicates with computers within the plant for constant updates in production. The controller is used to control the robot manipulator’s movements as well as to control peripheral components within the work cell. The user can program the movements of the manipulator into the controller through the use of a hard-held teach pendant.This information is stored in the memory of the controller for later recall.The controller stores all program data for the robotic system.It can store several differentprograms,and any of these programs can be edited.The controller is also required to communicate with peripheral equipment within the work cell. For example,the controller has an input line that identifies when a machining operation is completed.When the machine cycle is completed,the input line turn on telling the controller to position the manipulator so that it can pick up the finished part.Then ,a new part is picked up by the manipulator and placed into the machine.Next,the controller signals the machine to start operation.The controller can be made from mechanically operated drums that step through a sequence of events.This type of controller operates with a very simple robotic system.The controllers found on the majority of robotic systems are more complex devices and represent state-of-the-art eletronoics.That is,they are microprocessor-operated.these microprocessors are either 8-bit,16-bit,or 32-bit processors.this power allows the controller to be very flexible in its operation.The controller can send electric signals over communication lines that allow it to talk with the various axes of the manipulator. This two-way communication between the robot manipulator and the controller maintains a constant update of the end the operation of the system.The controller also controls any tooling placed on the end of the robot’s wrist.The controller also has the job of communicating with the different plant computers. The communication link establishes the robot as part a computer-assisted manufacturing (CAM)system.As the basic definition stated,the robot is a reprogrammable,multifunctional manipulator.Therefore,the controller must contain some of memory stage. The microprocessor-based systems operates in conjunction with solid-state devices.These memory devices may be magnetic bubbles,random-access memory,floppy disks,or magnetic tape.Each memory storage device stores program information fir or for editing.C.power supplyThe power supply is the unit that supplies power to the controller and the manipulator. The type of power are delivered to the robotic system. One type of power is the AC power for operation of the controller. The other type of power isused for driving the various axes of the manipulator. For example,if the robot manipulator is controlled by hydraulic or pneumatic drives,control signals are sent to these devices causing motion of the robot.For each robotic system,power is required to operate the manipulator .This power can be developed from either a hydraulic power source,a pneumatic power source,or an electric power source.There power sources are part of the total components of the robotic work cell.中⽂翻译机器⼈⼯业机器⼈是在⽣产环境中⽤以提⾼⽣产效率的⼯具,它能做常规乏味的装配线⼯作,或能做那些对于⼯⼈来说是危险的⼯作,例如,第⼀代⼯业机器⼈是⽤来在核电站中更换核燃料棒,如果⼈去做这项⼯作,将会遭受有害放射线的辐射。
新型爬壁机器人多向磁化永磁吸附装置的设计外文文献翻译、中英文翻译
新型爬壁机器⼈多向磁化永磁吸附装置的设计外⽂⽂献翻译、中英⽂翻译附录1:外⽂翻译新型爬壁机器⼈多向磁化永磁吸附装置的设计引⾔:⼀种⽤于爬壁机器⼈的多向磁化永磁吸附装置(PMAD)。
在相同质量下,新型PMAD能显著提⾼吸附⼒。
⾸先,基于本⽂提出的设计理论,对新型PMAD的磁路进⾏了优化。
新型PMAD包含多个排列紧密的不同磁化⽅向的永磁体。
根据磁化⽅向的排列规律,磁体可分为若⼲个元件单元。
在每个元件单元中,磁化⽅向沿半圆分布.其次,采⽤有限元分析软件ansys workbench对结构进⾏参数化建模和结构特征分析。
对新型PMAD进⾏了特性分析、磁路模拟、吸附⼒计算和参数优化。
在此基础上,提出了材料和体积相同的新型和Halbach型PMAD。
都是试制的。
测定了不同⽓隙厚度下的吸附⼒。
实验结果表明,在相同质量下,与Halbach型PMAD相⽐,新型PMAD的吸附⼒平均提⾼了⼀倍,最⼤放⼤倍数为2.3倍。
最后,将新型pMADs应⽤于爬壁机器⼈的超声波检测中,提供了稳定可靠的吸附性能。
1.概况爬墙机器⼈作为⼀种特殊的移动机器⼈,可以在墙、天花板等⼆维或复杂的三维环境中执⾏各种任务,除移动机器⼈⽤轮⼦或腿在地⾯上移动外,爬墙机器⼈还具有在移动时保持⾝体对抗重⼒的独特特性。
因此,在爬壁机器⼈设计中,既要考虑移动性,⼜要考虑吸附性。
根据吸附⽅式的不同,爬壁机器⼈可分为五类:真空吸附式、磁吸附式、夹持式、导轨式和仿⽣t型。
YPE3磁性吸附,包括永磁吸附和电磁吸附,⽐真空吸附更适⽤于铁磁表⾯。
⼀般来说,磁路的设计应该是为了最⼤限度地利⽤其中的材料。
另⼀⽅⾯,如果在移动设备上安装PMAD,则PMAD质量的降低可以提⾼移动设备的移动性。
因此,优化PMAD的磁路以增加吸附量是⾮常必要的。
2.多向磁化PMAD的结构设计将不同的部件单元紧密地布置可以使泄漏通量最⼩化并集中更多的磁感应。
“期望区域”中的n⾏。
同样,沿y轴两侧也有泄漏通量。
机器人对人类的好处和坏处英语作文

机器人对人类的好处和坏处英语作文Robots: The Good, The Bad, and The Creepy!Hi there! My name is Emma and I'm 10 years old. Today I want to talk to you about robots. Robots are these really cool machines that can do all sorts of things. Some robots are made to help people, some are just for fun, and some are...well, a little creepy if you ask me!First off, let me tell you about all the awesome ways robots can make our lives better. Robots are super strong and never get tired, so they can do jobs that are too hard or too boring for humans. Like lifting really heavy things or putting together cars in a factory over and over again. Robots are also really precise. Their robot arms and tools can put things together perfectly every single time.That's why robots are great for building stuff, especially tiny little parts for computers and phones. Humans couldn't make those parts so perfectly! Robots can also go places that are too dangerous for people, like fixing a nuclear reactor or exploring the depths of the ocean. Instead of a person risking their life, we can just send in a robot!Some robots even help out doctors and nurses in hospitals. They can Move around heavy equipment, deliver medicines, and help with surgery by holding cameras or tools. Robots don't get sleepy or shaky hands, so they are really good at that kind of precise work. Cool, right?Robots are also helping to make our lives more fun and convenient. You've probably seen or heard of robot vacuum cleaners that can automatically clean your house for you. No more pushing that heavy vacuum around! Or how about those cute little robot pets and toys that can walk, dance, and play games? Having a robot buddy sounds awesome to me.Speaking of robot buddies, some robots are even being designed to take care of older people who can't take care of themselves anymore. These robots can remind them to take their medicine, call for help if they fall down, and just keep them company so they don't get lonely. That's really nice, isn't it?Okay, I've talked about lots of good robots so far. But you know what? Robots can also be kinda bad...or at least cause some problems. One issue is that robots could take over jobs that used to be done by humans. If a factory gets a bunch of robots to build cars, they might not need as many humanworkers anymore. That's not fair to all the people who could lose their jobs to robots!Robots that take care of older people sound helpful, but it's kinda sad if an older person only has robots to keep them company instead of real people. Having robots as friends seems pretty lonely to me. And some people are honestly just creeped out by robots, especially if they look too human-like. Having a robot pretending to be a person makes some grown-ups feel really uncomfortable for some reason.Another worry is that some day, super intelligent robots could become smarter than humans. If that happened, those robots might not want to follow our orders and rules anymore. A robot that gets TOO smart could maybe even try to take over and rule the world! That sounds like a scary movie, doesn't it? I really hope robots always listen to their human creators.But you know, even regular robots that aren't evil geniuses could cause big problems by accident. What if a big, strong robot gets a glitch and starts swinging its powerful arms around? It could seriously hurt someone! Or a self-driving robot car might have an error and crash into something. Robots have to be programmed very, very carefully so they don't make dangerous mistakes.And let's not forget about privacy! Some robots have cameras and sensors to see the world around them. But if those robots get hacked by bad people, those cameras could be used to spy on your private life at home. Nobody wants a creepy robot peeping through their window! Robots need really good cyber security to protect our privacy.So those are some of the pros and cons of robots from my perspective. Robots can help us in so many cool ways, like with building, medicine, dangerous jobs, and taking care of people. But we also have to be careful that robots don't。
自动爬墙机器人控制系统设计

对核废液储罐进行视觉检查、测厚及焊缝探伤等;石化企业:
对立式金属罐或球形罐的内外壁面进行检查或喷砂除锈、喷漆防腐、测量和保养;建筑行业:
用于对巨型壁面的喷涂,玻璃壁面的清洗,磁砖安装,桥梁探伤等;消防部门:
用于传递救援物资,进行救援工作;造船业:
用于喷涂船体的内外壁等。
它作为高空极限作业的一种自动机械装置,越来越受到人们的重视。
基于PLC的爬壁机器人控制系统的设计二、毕业论文(设计)主要内容:
设计一种以PLC为核心控制的吸盘式爬壁机器人控制系统,用于高空壁面作业等。
设计的机器人采用有线控制和PLC控制相结合,有线控制是通过有线控制盒的按钮开关来控制电机正反转、控制真空泵的工作状态。
PLC控制是基于已经编好的PLC程序对机器人进行自动控制。
表2-1系统输入输出总点数输出点元器件或功能元器件数或功能数每个元器件所需点数所需点数移动驱动电动机2 2 4微型真空泵2 1 2蜂鸣器1 1 1输出总点数7输入点元器件或功能元器件数或功能数每个元器件所需点数所需点数按钮开关1 1 1接近开关4 1 4输入总点数5总共需要输出点数7点,输入点数为5点。
单片机控制系统具有较高的性价比,但控制系统则需进行难度较大的系统软硬件设计和抗干扰设计,须进行工作量较大的硬件组装,开发周长且技术难度较大,对我们无较多控制要求爬墙机器人不适宜。
DSP控制系统用于数字信号数据处理,计算速度快,但也需进行较多的系统软硬件设计和抗干扰设计,难度也较大。
因此DSP的控制方式也不适宜。
另外,可在线修改程序,改变控制方案而不拆动硬件。
三、能适应各种恶劣的运行环境,抗干扰能力强,可靠性强,远高于其他控制方式。
2.3 PLC的选型PLC的输入输出模块选择要根据系统所需的输入输出点数来确定,PLC作为机器人控制核心,其输入主要为接近开关和操作按钮开关的开关量,输出主要为各个电机和真空泵的开关量,这些开关量决定PLC输入输出点数。
一个新的仿生吸附爬墙机器人
Corresponding author: Amirpasha Peyvandi E-mail:Peyvandi@Journal of Bionic Engineering 10 (2013) 12–18A New Self-Loading Locomotion Mechanism for Wall Climbing RobotsEmploying Biomimetic AdhesivesAmirpasha Peyvandi 1, Parviz Soroushian 1, Jue Lu 21. Department of Civil and Environmental Engineering , Michigan State University , 3546 Engineering Building ,E . Lansing , MI 48824-1226, USA2. Senior Scientist , Technova Corporation , 1926 Turner Street , Lansing , MI 48906, USAAbstractA versatile locomotion mechanism is introduced and experimentally verified. This mechanism comprises four rectangular wheels (legs) with rotational phase difference which enables the application of pressure to each contacting surface for securing it to the surface using bio-inspired or pressure-sensitive adhesives. In this mechanism, the adhesives are applied to two rigid plates attached to each wheel via hinges incorporating torsional springs. The springs force the plates back to their original position after the contact with the surface is lost in the course of locomotion. The wheels are made of low-modulus elastomers, and the pressure applied during contact is controlled by the elastic modulus, geometry and phase difference of wheels. This reliable adhesion system does not rely upon gravity for adhering to surfaces, and provides the locomotion mechanism with the ability to climb walls and transition from horizontal to vertical surfaces.Keywords: biomimetics, adhesives, locomotion, climbing robots, geckoCopyright © 2013, Jilin University. Published by Elsevier Limited and Science Press. All rights reserved. doi: 10.1016/S1672-6529(13)60194-81 IntroductionThere is a great interest in developing versatile locomotion capabilities for (unmmaned) micro air ve-hicles (when landed) and also for micro robots and un-manned ground vehicles [1–4]. These vehicles can replace human in high-risk or remote work environments like high-rise buildings [5,6], and nuclear power plants [3,7] or in special tasks such as inspection, surveillance and re-connaissance [8].Over the years, a great number of locomotion mechanisms have been proposed for traversing rugged horizontal or vertical surfaces [3]. A key consideration in designing such systems is the ability to climb vertical surfaces. Three major adhesion concepts have been considered for making use of these locomotion mecha-nisms: vacuum suction [9–13], magnetic attraction [14–17], and grasping/gripping with claws [18–20].There are some advantages and drawbacks associ-ated with each of these mechanisms. Vacuum suction is used widely because of its simple structure and control [11,23]; this mechanism, however, requires a smooth sur-face to ensure sealing, and its untethered climbing du-ration is limited by power efficiency. Magnetic adhesion can be very strong, but it is limited to ferromagnetic surfaces. Micro claws are also limited to very rough surfaces such as brick and stone, but they can not func-tion on smooth surfaces such as glass or painted wall.Recently, some progress has been made in loco-motion against various types of surfaces with different roughness conditions by using an emerging generation of dry bio-inspired adhesive materials [28] comprising fibrillar arrays, which are similar to those used by geckos, spiders, flies and other insects [22–24].Bio-inspired adhesive micro/nano-scale fibrillar structures provide high adhesion capacity against a great variety of surfaces at high reliability levels. Self- cleaning is an appealing feature of the fibrillar (inspired by the gecko-foot) adhesion mechanism [25–27]. Various locomotion mechanisms could benefit from the intro-duction of bio-inspired adhesives for energy-efficient and versatile locomotion against different sur-faces [22,23,29–32].The pressure applied during contact is an importantPeyvandi et al .: A New Self-Loading Locomotion Mechanism for Wall Climbing Robots Employing Biomimetic Adhesives 13factor governing the adhesion capacity developed by bio-inspired adhesives (or traditional pressure-sensitive adhesives) against the surface. In this study, a locomo-tion mechanism (Fig. 1) was developed for streamlined application of the pressure required to bring the adhesive into intimate contact with surfaces of different inclina-tions and roughness conditions. This mechanism enables effective use of bio-inspired adhesives (as well as tradi-tional pressure-sensitive adhesives) which offer desired qualities such as energy-efficient separation from the surface via peeling [33], ability to adhere to different sur-faces, thermal stability [34], and self-cleaning attrib-utes [26,27].Fig. 1 The locomotion system with bio-inspired adhesives climbing a wall.2 Mechanism of pressure application upon contactThe contacting surfaces of plates connected to wheels are coated with peelable bio-inspired adhesives. These adhesives require application of a minimum pressure upon contact in order to effectively adhere to the surfaces of different types and roughness conditions. The approach adopted here uses the adhesion capacity of two (first group) of the wheels that have already adhered to the surface in order to apply pressure to the other two (second group of) wheels as they establish contact with the surface during locomotion. The first group of wheels would then peel off the surface, and the adhesion ca-pacity of the second group would be used to apply pressure to them as they establish new contacts with the surface. This sequence of events would be repeated in the course of locomotion. The pressure applied to each group of wheels upon contact is equilibrated by the ten-sion generated in the other group of wheels, and it does not depend upon surface inclination and gravity. This enables the system to traverse the surfaces of different inclinations (e.g., climb walls).A wheel with two rigid plates (coated with bio-inspired fibrillar adhesive) is shown in Fig. 2. This wheel is made of an elastomer, and the geometry and elastic modulus of the wheel are selected for application of the required contact pressure during locomotion. The wheels in each of the two groups noted above are per-pendicular to the wheels in other groups (i.e., the two groups of wheels have 90 degrees rotational phase dif-ference). The difference between the length and width of rectangular wheels is thus the cause of pressure appli-cation on a group of wheels establishing contact with the surface during locomotion. In each elastomeric wheel (component 3 in Fig. 2), the contacting surface is that of a rigid plate (component 2 in Fig. 2) that is attached to the wheel via a hinge incorporating a rotational spring (component 5 in Fig. 2). The contacting surface of the plate is coated with a peelable bio-inspired (fibrillar) adhesive (component 1 in Fig. 2). As each plate estab-lished contact with the surface, the rotational spring allows it maintain contact with the surface as the wheel undergoes 90 degrees rotation. Afterwards, the plate peel off the surface during another 90 degrees of rotation, and the rotational spring returns it to its original position after it is peeled off the surface. Component 4 in Fig. 2 is a shaft that connects an axle to the wheel.2342(a +b)2at5(a)(b)Fig. 2 Wheel (leg) components. (a) Front view; (b) side view.3 Wheel (leg) designEach wheel in the locomotion mechanism contacts the surface (via plates coated with bio-inspired adhesive) with either its short face (with length 2a ) or its long face (with length 2b ) facing the surface (Fig. 3). Stiffness of the wheel (under loads normal to the surface applied via axle at mid-height) is a factor in determining the pres-sure applied upon contact for adherence to the surface.Journal of Bionic Engineering (2013) V ol.10 No.114When the short side (width) of a wheel contacts the surface, this stiffness, K 1 can be written as1,EatK b=(1) where E is the elastic modulus of the wheel material, a and b are half the width and length of wheel, respectively, and t is the thickness of wheel.When the long side (length) of a wheel contacts the surface, the stiffness, K 2 can be written as2,Ebt K a=(2)Fig. 3 Schematic view of wheel with its dimensions.Fig. 4 shows the orientations of the wheels in lo-comotion system. Fig. 4 also shows the forces applied to the wheels in a particular step during locomotion; ne-glecting the gravity forces would produce similar forces in horizontal, vertical or other configurations of the locomotion system. The applied forces are tensile in the case of wheels with their longer side (length) normal to the surface and they are compressive in the case of wheels with their shorter side (width) normal to the surface. These forces are applied via axles. The wheels receiving compressive forces are those just contacting the surface, and the compressive force generates the pressure required for adhering to the surface via adhe-sives (bio-inspired or pressure sensitive adhesives). The wheels receiving tensile forces are those that have al-ready adhered to the surface, and their adhesion capacity is used to balance the compressive force applied on newly contacting wheels. The tensile and compressive forces shown in Fig. 4 should balance each other1324.F F F F +=+ (3)The force developed in each wheel is equal to the product of the wheel stiffness and the wheel deformation in the direction of applied force111222333444,,,,F K F K F K F K δδδδ==== (4) where δ1, δ2, δ3 and δ4 are the deformations of wheels 1, 2, 3 and 4, respectively, normal to the contact surface over the distance from axle to contact surface. With wheels of similar geometric and material characteristics, and neglecting the gravity effects, the configuration of Fig. 4 produces forces with equal absolute values (|F 1|=|F 2|=|F 3|=|F 4|).F 1F 2F 3F 4Fig. 4 Schematic view of forces applied to the four wheels in a particular step during locomotion.Since wheels 1 and 3, and also wheels 2 and 4 act similarly, this discussion focuses on wheels 1 and 2. For these two wheels,112212.Eat Ebt K K b a δδδδ⎛⎞⎛⎞=⇒=⎜⎟⎜⎟⎝⎠⎝⎠(5)Hence,2122.b aδδ= (6) Wheels 1 and 2, which are perpendicular to each other, undergo deflections δ1 and δ2 in order to overcome the difference between the distances of their axel from contact surface, that is ∆ = b −a . Hence,12,δδ+=Δ (7)where δ1 and δ2 are expressed as absolute values.The above expressions enable derivation of one dimension of the rectangular wheel (e.g., half the width, b ) in terms of its other dimension (e.g., half the length, a ) and elastic modulus (E ) in order to apply a targeted compressive force (F 2) required for adhering to the bio-inspired adhesive to the contact surface, as described below.Eqs. (6) and (7) indicate (using the notation β = b 2/a 2)Peyvandi et al .: A New Self-Loading Locomotion Mechanism for Wall Climbing Robots Employing Biomimetic Adhesives 151(),(1)b a βδβ−=+ (8)2().(1)b a δβ−=+ (9) The above equations can be used to derive (b ) in terms of (a ) and elastic modulus. This design requires the definition of gravity forces, which have been ne-glected so far. A viable design, however, would require consideration of gravity forces because the effects of gravity forces depend upon surface inclination, mass of the system, and the distance from the center of gravity of the mass to surface. At a critical point during locomotion, two of the wheels are adhered to the surface. These two wheels should be able to resist the tensile and shear forces applied under the combined effects of gravity and the balancing action of wheels described above. This requirement combined with the shear and tensile adhe-sion capacities of the bio-inspired adhesives would govern the determination of the total contact area of each wheel. This contact area is actually that of a plate con-nected to the wheel, which is coated with bio-inspired adhesive. Fig. 2 presents the plate geometry; its length is equal to 2(a +b ) and its width is equal to the wheel thickness.4 Kinematics of locomotionReferring to the Fig. 1, each wheel comprises a flexible (elastomeric) rectangular body (component 3 in Fig. 2), with different parts attached to it. These parts include two side plates (component 2 in Fig. 2), which are covered with adhesives (preferably bio-inspired fibrillar adhesives, or pressure-sensitive adhesives) (component 1 in Fig. 2). Two diagonally oriented wheels (see Fig. 1), which rotate around its axis (component 4 in Fig. 2), are in phase (i.e., have the same orientation), and the other two are 90 degrees out of phase with respect to them. The side plates at their attachment locations in-corporate torsional springs (component 5 in Fig. 2) which restore their original inclinations after the plate peels off the surface in the course of wheel rotation.Each wheel has two rigid plates, each of which stays in contact with the surface over a rotation angle of 180 degrees. The use of solid plates improves the uni-formity of pressure applied to the contact area. Upon separation, the torsional spring (component 5 in Fig. 2) restores the original inclination of the rigid plate. Each180-degree rotation of the wheel uses the adhesion ca-pacity of two in-phase wheels to apply pressure on the other two wheels (see Fig. 4). The forces in Fig. 4 are developed due to the phase difference between rotational angles of rectangular wheels connected to a rigid body via axles. The rotational phase difference generates height difference from the axle of each wheel to the contact surface.A more detailed illustration of the operation of one wheel in the locomotion mechanism of Fig. 1 is pre-sented in Fig. 5. The wheel undergoes the four sequential steps shown in Fig. 5 as it undergoes 360 degrees rota-tion. The rotation of the hinged rigid plate (2a) is enabled by a torsional spring introduced at the hinge location (component 6a in Fig. 5). During the rotation of the wheel, the hinge incorporating the torsional spring is key to maintaining the adhered status of the plate (compo-nent 2a in Fig. 5) after the application of pre-load pres-sure as the wheel undergoes 90 degrees rotation before it peels off the surface as the next hinged plate (component 2b in Fig. 5) establishes contact and receives thepre-load pressure.Fig. 5 The sequential steps involved in the rotation of a wheel.In step 1 (in Fig. 5), plate (2a) has established contact, and received the pre-load pressure required for adhering to the surface. In step 2, the plate has adhered to the surface, and its adhesion capacity is used to apply pre-load pressure to other wheels which are out of phase with respect to it. Plate (2a) remains in contact with theJournal of Bionic Engineering (2013) V ol.10 No.116surface throughout steps 1 and 2. During transformation from step 2 to step 3, plate (2a) separates (peels off) from the surface, and the hinge (6a) incorporating torsional spring returns to the rest position of the torsional spring and brings plate (2a) into its rest position. In step 3, plate (2b) assumes the position of plate (2a) in step 1. In transition from step 3 to step 4, plate (2b) and hinge (6b) play the roles of plate (2a) and hinge (6a) in transition from step 1 to step 2. After step 4, the wheel configura-tion returns to step 1 because of incorporating torsional spring 6b which wants to return back to its rest position, and the four steps shown in Fig. 5 will be repeated.5 Experimental validation of the locomotion mechanismSelf-loading locomotion mechanism employing bio-inspired adhesives was developed and evaluated. The vehicle embodying the self-loading locomotion mechanismis is 4.5 cm wide and 12.0 cm long [25]. This system has two axles accommodating a total of four wheel-legs. Both axles are driven by a single motor. A rack and pinion steering mechanism pivots the front wheel-legs. The rack and pinion system comprises a pair of gears which convert rotational motion into linear motion. The “pinion” engages teeth on a linear “gear” bar known as the “rack”; rotational motion applied to the pinion causes the rack to move, thereby this action could transfer to the front wheel.The electronics drive system and batteries are contained within the system, and its total weight (in-cluding wheels weight) is 130 grams. Fig. 6 shows the details of a rectangular wheel and its side plates. ST-3040 Polyurethane (BJB Enterprise, Inc.) was used for production of the rectangular wheels. This polyure-thane has a tensile strength of 5.27 MPa, an elasticmodulus of 0.69 MPa, and a hardness of 42 A.Fig. 6 Geometry detailing of the new rectangular wheel.The wheels were designed based on the theoretical work presented earlier and were fabricated by casting in molds (Fig. 7a). The side plates at their attachment lo-cations (pins shown in Fig. 7a) incorporate torsional springs (Fig. 7b) which restore the original inclinations of plates after the contact with the surface is lost in the course of wheel rotation (locomotion). Fig. 8 shows two side views of the rectangular wheel with side plates. The side plates and the inclusions in polyurethane wheelwere made of aluminum.Fig. 7 Wheel production and components. (a) Molds used for casting the elastomeric body of wheels; (b) torsional springs usedat the pin location of side plates on elastomeric wheels.Fig. 8 Side views of wheels comprising an elastomeric rectan-gular body and aluminum components. (a) Back view; (b) front view.The locomotion mechanism incorporating four rectangular wheels is shown in Fig. 1 on a vertical glass surfaces. The side plates of wheels were covered with bio-inspired adhesives. These adhesives were fibrillar array, comprising fibrils 20 μm in length and 20 μm in diameter (Fig. 9). Tension and shear adhesion capacities of 1 cm × 1 cm specimens of fibrillar arrays which used in locomotion mechanism were measured against glass slides. The experimental was performed on three dif-ferent samples. These substrates were sonicated in dis-tilled water for 15 minutes, and then blown dried with N 2 gas. A preload pressure of 5 kPa (5 N on 1 cm × 1 cm contacted area) was applied to establish adhesion prior to the performance of tension and shear adhesion tests. Based on the adhesion capacity provided by fibrillar array and locomotion system weight, the required bio-inspired adhesive (fibrillar array) was calculated and put on the bottom of each wheels. Developing fibrillar array could provide 25 kPa and 15 kPa shear and tensile adhesion capacity, respectively, against glass (Fig. 10).Peyvandi et al .: A New Self-Loading Locomotion Mechanism for Wall Climbing Robots Employing Biomimetic Adhesives 17Bio-inspired adhesive arrays with 1 cm × 5 cm planar dimensions were placed on the bottom of each plate. The system was evaluated by determining its ability to climb a vertical glass surface (Fig. 1). The locomotion system ascended the vertical surface about 90 cm at a speed of 4 cm·s −1without falling.Fig. 9 Fabricated bio-inspired adhesive fibrillar structure used in developed locomotion system.Fig. 10 Adhesion capacity of fabricated bio-inspired adhesive fibrillar structure on glass substrate with mean and standard de-viation.6 ConclusionA new locomotion mechanism is presented, with wheels employing bio-inspired adhesives for operation against surfaces of different inclination and roughness conditions. This mechanism enables movement on ver-tical surfaces. The new locomotion mechanism provides the inherent ability to apply pressure on adhesives as they establish contact with the surface, without relying on gravity, in order to effectively adhere to various sur-faces of different inclinations. Some of the wheels in this locomotion-mechanism have rotational phase difference with respect to the other wheels. At each moment, the in-phase wheels have established adhesion with the surface, and are used to apply pressure to the other wheels as they contact the surface. In order to validate this self-loading locomotion mechanism, prototype system was designed and fabricated using bio-inspired adhesives and was tested on vertical glass surfaces. The system ascended the vertical surface at a speed of 4 cm·s −1 without falling. This locomotion mechanismcan provide unmanned (air or ground) vehicles with versatile mobility in difficult terrain and against inclined or vertical surfaces.AcknowledgmentsThe authors acknowledge the support of the U.S. Air Force (Contract FA8651-07-C-0092) for the project.References[1] Fu Y , Li Z, Yang H, Wang S. Development of a wall climb-ing robot with wheel-leg hybrid locomotion mechanism. Proceedings of IEEE International Conference on Robotics and Biomimetics , Sanya, China, 2007, 1876–1881. [2] Liu S Y , Gao X S, Li K J, Li J, Duan X G . A Small-sizedwall-climbing robot for anti-terror scout. Proceedings of IEEE International Conference on Robotics and Biomimet-ics , Sanya, China, 2007, 1866–1870.[3] Zhu H F, Guan Y S, Wu W Q, Zhou X F, Zhang L M, ZhangX M, Zhang H. The superior mobility and function of W-Climbot-A bio-inspired modular biped wall-climbing robot. Proceedings of IEEE International Conference on Robotics and Biomimetics , Karon Beach, Phuket, Thailand, 2011, 509–514.[4] Ariga A, Kobayashi T, Yamaguchi T, Hashimoto S. Wallclimbing robot in narrow space with pantograph-type structure. Proceedings of IEEE International Conference on Robotics and Biomimetics , Tianjin, China, 2010, 1507–1512.[5] Longo D, Muscato G . The alicia climbing robot: Athree-module robot for automatic wall inspection. IEEE Robotics & Automation Magazine , 2006, 13, 42–50. [6] Zhang H X, Zhang J W, Zong G H, Wang W, Liu R. Skycleaner 3: a real pneumatic climbing robot for glass-wall cleaning. IEEE Robotics & Automation Magazine , 2006, 13, 32–41.[7] Luk B L, Cooke D B, Collie A A, Hewer N D, Chen S.Intelligent legged climbing service robot for remote inspec-tion and maintenance in hazardous environments. Proceed-ings of IEEE Conference on Mechatrinics and Machine Vi-sion in Practice , Hong Kong, China, 2001, 252–256. [8] Fu Y L, Li Z H, Wang S G . A wheel-leg hybrid wall climbingrobot with multi-surface locomotion ability. Proceedings of IEEE International Conference on Mechatronics and Automation , Takamatsu, Japan, 2008, 627–632.[9] Hirose S, Nagakubo A, Toyama R. Machine that can walkand climb on floors, walls and cellings. Proceedings of IEEE International Conference on Advanced Robotics , Pisa, Italy, 1991, 753–758.Journal of Bionic Engineering (2013) V ol.10 No.1 18[10]Yang H, Liu R, Hong Q F, He N S B. A miniature multi-jointwall-climbing robot based on new vibration suction roboticfoot. Proceedings of IEEE International Conference onAutomation and Logistics, Qingdao, China, 2008, 1160–1165.[11]Xu D J, Gao X S, Wu X B, Fan N J, Li K J, Koki K. Suctionability analyses of a novel wall climbing robot, Proceedingsof IEEE International Conference on Robotics and Biomi-metics, Kunming, China, 2006, 1506–1511.[12]Guo W, Zhong M, Li M T, Li Y. Design of a six leggedwall-climbing robot, Proceedings of IEEE International Conference on Advanced robotics and Its Social Impacts,Taibei, China, 2008, 1–4 .[13]Li J, Gao X S, Fan N J, Zhu W, Yin J, Jia Y J. Wall climbingrobot based on negative pressure-thrust suction method.Proceedings of IEEE International Conference on Mecha-tronics and Automation, Takamatsu, Japan, 604–609. [14]Guo L, Rogers K, Kirkham R. A Climbing robot with con-tinuous motion. Proceedings of IEEE International Con-ference on Robotics & Automation, San Diego, CA, 1994,2495–2500.[15]Grieco J C, Prieto M, Armada M, Santos P G. A six-leggedclimbing robot for high payloads. Proceedings of IEEE In-ternational Conference on Control Applications, Trieste, It-aly, 1998, 446–450.[16]Koh K H, Kuppan Chetty R M, Ponnambalam S G. Model-ing and simulation of electrostatic adhesion for wall climb-ing robot. Proceedings of IEEE International Conference onRobotics and Biomimetics, Phuket, Thailand, 2031–2036. [17]Sheng W, Gu J, Shen Y. Permanent magnetic system designfor the wall-climbing robot. Applied Bionics and Biome-chanics, 2006, 3, 151–159.[18]Kim S, Asbeck A T, Cutkosky M R, Provancher W R.SpinybotII: climbing hard walls with compliant micro spines.Proceedings of IEEE International Conference on AdvancedRobotics, 2005, 601–606.[19]Bretl T, Rock S, Latombe J C. Motion planning for athreelimbed climbing robot in vertical natural terrain. Pro-ceedings of IEEE International Conference on RoboticsAutomation, Taipei, Taiwan, China, 2003, 2946–2953. [20]Spenko M, Haynes G, Saunders J, Cutkowsky M, Rizzi A,Full R, Koditschek D. Biologically inspired climbing with ahexapedal robot. Journal of Field Robotics, 2008, 24,223–242.[21]Wang W, Wang K, Zong G H, Li D Z. Principle and ex-periment of vibrating suction method for wall-climbing ro-bot, Vacuum, 2010, 85, 107–112. [22]Daltorio K A, Gorb S, Peressadko A, Horchler A D, Ritz-mann R E, Quinn R D A. Robot climbs walls using mi-cro-structured polymer feet. Proceedings of the Interna-tional Conference on Climbing and Walking Robots,London, UK, 2005, 131–138.[23]Murphy M P, Sitti M. Waalbot: An agile small-scalewall-climbing robot utilizing dry elastomer adhesives. IEEETransactions on Mechatronics, 2007, 12, 330–338.[24]Kim S, Spenko M, Trujillo S, Heyneman B, Cutkosky MR. Smooth vertical surface climbing with directional adhe-sion, IEEE Transactions on Robotics, 2008, 24, 65–74. [25]Hansen W R, Autumn K. Evidence for self-cleaning ingecko setae. Proceedings of the National Academy of Sci-ences of the United States of America, 2005, 102, 385–389.[26]Kim S, Cheung E, Sitti M. Wet self-cleaning of biologicallyinspired elastomer mushroom shaped microfibrillar adhe-sives. Langmuir, 2009, 25, 7196–7199.[27]Lee J, Fearing R S. Contact self-cleaning of synthetic geckoadhesive from polymer microfibers. Langmuir, 2008, 24,10587–10591.[28]Ji A, Han L, Dai Z. Adhesive contact in Animal: Morphol-ogy, mechanism and bio-inspired application. Journal of Bionic Engineering, 2011, 8, 345–356.[29]Daltorio K, Wei T, Gorb S N, Ritzmann R E, Quinn R D.Passive foot design and contact area analysis for climbing Mini-Whegs™. Proceedings of IEEE International Con-ference on Robotics Automation, Roma, Italy, 2007, 1274–1279.[30]Murphy M P, Kute C, Mengüc Y, Sitti M. Waalbot II: Ad-hesion recovery and improved performance of a climbing robot using fibrillar adhesives. International Journal of Robotic Research, 2011, 30, 118–133.[31]Menon C, Murphy M, Sitti M. Gecko Inspired SurfaceClimbing Robots. Proceedings of IEEE International Con-ference on Robotics and Biomimetics, Shenyang, China, 2004, 431–436.[32]Krahn J, Liu Y, Sadegi A, Menon C. A tailless timing beltclimbing platform utilizing dry adhesives with mushroom caps. Smart Materials and Structures, 2011, 20, 115021. [33]Ghatak A, Mahadevan L, Chung J Y, Chaudgury M, ShenoyV. Peeling from a biomimetically patterned thin elastic film.Proceedings of the Royal Society A-Mathematical Physical and Engineering Sciences, 2004, 460, 2725–2735.[34]Gong G, Wu J, Liu J, Sun N, Zhao Y, Jiang L. Bio-inspiredadhesive superhydrophobic polyimide mat with high ther-mal stability. Journal of Materials Chemistry, 2012, 22,8257–8262.。
爬墙机器人设计毕业论文
1.绪论1.1课题背景和研究意义机器人的万能性和可编程序性,决定了它将取代一些自动化机器,特别是在生产中它与我们人类紧密相连。
由于它的万能性,可以提高生产率,改进生产质量,并从多方面降低成本。
对于一个产品经常变化的市场来说,对机器人重新调整和编程所需要费用,远远低于重新调整固定化的自动化机器。
另外由于机器人承担了很多危险或令人厌烦的工作,许多的职业病、工伤及因此需要支付的高昂代价都可以避免了。
因为机器人中可以总是可以以相同的方式完成其工作,所以产品质量十分稳定,这也会给制造者带来确定的效益;产品总价值中每一项费用的节省,都将提高产品在各种市场上的竞争能力。
机器人的另一大优点是可用于小批量生产,而固定化的自动装置一般只对大批量的、标准化的生产才是有利的。
所以综合上述,研究机器人势在必行。
在西方国家,由于劳动力成本的提高为企业带来了不小的压力,而机器人价格指数的降低又恰巧为其进一步推广应用带来了契机。
减少员工与增加机器人的设备投资,在两者费用达到某一平衡点的时候,采用机器人的利显然要比采用人工所带来的利大,它一方面可大大提高生产设备的自动化水平,从而提高劳动生产率,同时又可提升企业的产品质量,提高企业的整体竞争力。
虽然机器人一次性投资比较大,但它的日常维护和消耗相对于它的产出远比完成同样任务所消耗的人工费用小。
因此,从长远看,产品的生产成本还会大大降低。
而机器人价格的降低使一些中小企业投资购买机器人变得轻而易举。
因此,工业机器人的应用在各行各业得到飞速发展。
根据UNECE的统计,2021 年全世界有75万台工业机器人用于工业制造领域,其中38.9万在日本、19.8万在欧盟、9万在北美,7.3万在其余国家。
至2021 年底全世界在役的工业机器人至少有约100万。
随着机器人技术的出现和发展以及人们自我保护意识的增强,人们迫切希望能用机器人代替人进行这些高空极危险的作业,从而把人从恶劣的环境和繁重的劳动中解脱出来。
爬壁式机器人-毕业论文-毕业设计
高等教育自学考试毕业设计(论文)题目爬壁式机器人设计专业班级姓名指导教师所属助学单位2011年 12 月 2 日目录前言 (2)第一章 (3)总体结构 (3)1.1机械结构 (3)1.2控制系统硬件 (4)1.3传感导引系统 (9)第二章 (14)2.1爬壁机器人磁吸附原理 (14)2.2磁吸附技术简介 (14)2.3.电磁铁吸力及选材 (14)第三章 (16)3.1一种新型磁轮单元 (16)3.2磁轮分析 (16)第四章爬壁机器人的力学分析 (18)4.1爬壁机器人静力学分析 (18)4.2爬壁机器人动力学分析 (19)结论 (21)参考文献 (21)致谢 (21)摘要爬壁机器人,是极限作业机器人的一个分支,它的突出特点是可以在垂直墙壁表面或者天花板上移动作业爬壁机器人能吸附于壁面而不下滑,实现的方法主要有两种:负压吸附与磁吸附介绍一种新型爬壁机器人,它以超声串列法自动扫查和检测在役化工容器筒壁对接环焊的危害性缺陷。
本文将着重介绍了它的机械结构及位置调整运动控制算法。
这种机器人采用磁轮吸附和小车式行走,利用磁带导航,光纤传感器检测,具有结构紧凑、导航性能好、位置调整方法可行和定位精度高等特点。
本文将介绍的爬壁机器人为超声串列自动扫查机器人是以某炼油厂加氢反应器为具体的应用对象,用来以超声串列法自动扫查和检测筒壁对接环焊缝的危害缺陷而研制的,并按JB4730-94《压力容器无损检测》的要求,用超声串列法检测。
超声串列法要求一发、一收探头中心声束保持在一个与焊缝中心线相垂直的平面内,收发探头相对于串列基准线须保持等距、反相、匀速移动。
由于采用手动检测,操作难度大,重复性差,可比性差而难以实施。
对于这种用在圆形筒壁上在役检测的机器人,丹麦的force公司研制了多用途模块磁轮扫描仪AMS-9、AMS-10等系列磁轮爬壁机器人,日本的Osaka Gas Co。
Ltd公司研制了磁轮爬壁检测机器人,但是售价昂贵。
爬墙机器人设计—机器人结构设计+外文翻译
爬墙机器人设计—结构设计摘要本文设计一种以涵道风扇和负压吸盘为吸附系统主体的轮式爬墙机器人,对爬墙机器人的结构设计是个人主要研究方向。
首先提出基于负压吸附原理的机器人结构设计方案和要求,根据要求和尺寸,首先对爬墙机器人硬件设备和机械结构进行合理排布,自主设计一体化的机器人底板,并对其及主要运动组件进行Proe软件上的建模。
最后通过Proe的MDX模块对爬墙机器人进行虚拟模型运动仿真,检验基本机械结构的合理性和可行性。
关键词:爬墙机器人;负压吸附;机器人结构Wall Climbing Robot Design-Structural DesignAbstractThis paper designs a wheeled wall climbing robot with ducted fan and negative pressure suction cup as the main body of the adsorption system. The structural design of the wall climbing robot is my main research direction. Firstly, the structural design scheme and requirements of the robot based on the negative pressure adsorption principle are proposed. According to the requirements and sizes, the hardware equipment and mechanical structure of the wall climbing robot are arranged reasonably, the integrated robot base plate is designed independently, and the Proe software modeling is carried out on the robot base plate and the main moving components. Finally, the MDX module of Proe is used to simulate the motion of the virtual model of the wall climbing robot to verify the rationality and feasibility of the basic mechanical structure.Keyword: Wall climbing robot; Negative pressure adsorption; Robot structure; Ducted fan目录目录 (1)1 绪论 (3)1.1 引言 (3)1.2研究背景及意义 (3)1.3国内外发展状况及发展趋势 (4)1.3.1国外研究现状 (4)1.3.2国内研究现状 (5)1.4 研究的主要内容和目标 (6)1.5 本章小结 (6)2 爬墙机器人的总体设计方案 (7)2.1本文主要研究内容 (7)2.2爬墙机器人的总体设计方案 (7)2.2.1系统总体设计要求 (7)2.2.2个人结构设计技术路线 (7)2.3爬墙机器人的主要组成系统 (7)2.4本章小结 (8)3爬墙机器人的结构设计 (8)3.1移动方式 (8)3.2移动机构 (8)3.3结构硬件布置 (9)3.4主要硬件设备 (10)3.4.2硬件外部设备区域安装 (11)3.5 本章小结 (12)4 Proe建模 (12)4.1 Proe建模软件介绍 (12)4.2 在Proe软件上的总体设计 (13)4.3机器人底板建模设计 (13)4.4驱动组件 (15)4.4.1步进电机 (15)4.4.2电机安装板组件 (16)4.5 涵道风扇组件 (17)4.6 其他组件 (19)4.6.1涵道风扇装夹套 (19)4.6.2联轴器 (20)4.6.3万向轮 (20)4.6.4车体外壳 (21)4.7本章小结 (21)5 仿真设计 (21)5.1运动仿真准备 (21)5.2 Proe中的机构运动模块 (23)5.3 机器人的运动仿真 (23)5.3 本章小结 (26)6 结论 (26)6.1设计的总结 (26)6.2不足之处 (27)6.3展望 (27)参考文献 (27)致谢 ............................................................................................................................... 错误!未定义书签。
毕业论文外文文献翻译Robots机器人
毕业设计(论文)外文文献翻译文献、资料中文题目:机器人文献、资料英文题目:Robots文献、资料来源:文献、资料发表(出版)日期:院(部):专业:班级:姓名:学号:指导教师:翻译日期:2017.02.14外文翻译外文资料:RobotsFirst, I explain the background robots, robot technology development. It should be said it is a common scientific and technological development of a comprehensive results, for the socio-economic development of a significant impact on a science and technology. It attributed the development of all countries in the Second World War to strengthen the economic input on strengthening the country's economic development. But they also demand the development of the productive forces the inevitable result of human development itself is the inevitable result then with the development of humanity, people constantly discuss the natural process, in understanding and reconstructing the natural process, people need to be able to liberate a slave. So this is the slave people to be able to replace the complex and engaged in heavy manual labor, People do not realize right up to the world's understanding and transformation of this technology as well as people in the development process of an objective need.Robots are three stages of development, in other words, we are accustomed to regarding robots are divided into three categories. is a first-generation robots, also known as teach-type robot, it is through a computer, to control over one of a mechanical degrees of freedom Through teaching and information stored procedures, working hours to read out information, and then issued a directive so the robot can repeat according to the people at that time said the results show this kind of movement again, For example, the car spot welding robots, only to put this spot welding process, after teaching, and it is always a repeat of a work It has the external environment is no perception that the force manipulation of the size of the work piece there does not exist, welding 0S It does not know, then this fact from the first generation robot, it will exist this shortcoming, it in the 20th century, the late 1970s, people started to study the second-generation robot, called Robot with thefeeling that This feeling with the robot is similar in function of a certain feeling, for instance, force and touch, slipping, visual, hearing and who is analogous to that with all kinds of feelings, say in a robot grasping objects, In fact, it can be the size of feeling out, it can through visual, to be able to feel and identify its shape, size, color Grasping an egg, it adopted a acumen, aware of its power and the size of the slide. Third-generation robots, we were a robotics ideal pursued by the most advanced stage, called intelligent robots, So long as tell it what to do, not how to tell it to do, it will be able to complete the campaign, thinking and perception of this man-machine communication function and function Well, this current development or relative is in a smart part of the concept and meaning But the real significance of the integrity of this intelligent robot did not actually exist, but as we continued the development of science and technology, the concept of intelligent increasingly rich, it grows ever wider connotations.Now I have a brief account of China's robot development of the basic profiles. As our country there are many other factors that problem. Our country in robotics research of the 20th century the late 1970s. At that time, we organized at the national, a Japanese industrial automation products exhibition. In this meeting, there are two products, is a CNC machine tools, an industrial robot, this time, our country's many scholars see such a direction, has begun to make a robot research But this time, are basically confined to the theory of phase .Then the real robot research, in 7500 August 5, 1995, 15 nearly 20 years of development, The most rapid development, in 1986 we established a national plan of 863 high-technology development plan, As robot technology will be an important theme of the development of The state has invested nearly Jiganyi funds begun to make a robot, We made the robot in the field quickly and rapid development.At present, units like the CAS ShenYng Institute of Automation, the original machinery, automation of the Ministry, as of Harbin Industrial University, Beijing University of Aeronautics and Astronautics, Qinghua University, Chinese Academy of Sciences, also includes automation of some units, and so on have done a very important study, also made a lot of achievements Meanwhile, in recent years, we end up in college, a lot of flats in robot research, Many graduate students and doctoralcandidates are engaged in robotics research, we are more representative national study Industrial robots, underwater robots, space robots, robots in the nuclear industry are on the international level should be taking the lead .On the whole of our country Compared with developed countries, there is still a big gap, primarily manifested in the We in the robot industry, at present there is no fixed maturity product, but in these underwater, space, the nuclear industry, a number of special robots, we have made a lot of achievements characteristics.Now, I would like to briefly outline some of the industrial robot situation. So far, the industrial robot is the most mature and widely used category of a robot, now the world's total sales of 1.1 million Taiwan, which is the 1999 statistics, however, 1.1 million in Taiwan have been using the equipment is 75 million, this volume is not small. Overall, the Japanese industrial robots in this one, is the first of the robots to become the Kingdom, the United States have developed rapidly. Newly installed in several areas of Taiwan, which already exceeds Japan, China has only just begun to enter the stage of industrialization, has developed a variety of industrial robot prototype and small batch has been used in production.Spot welding robot is the auto production line, improve production efficiency and raise the quality of welding car, reduce the labor intensity of a robot. It is characterized by two pairs of robots for spot welding of steel plate, bearing a great need for the welding tongs, general in dozens of kilograms or more, then its speed in meters per second a 5-2 meter of such high-speed movement. So it is generally five to six degrees of freedom, load 30 to 120 kilograms, the great space, probably expected that the work of a spherical space, a high velocity, the concept of freedom, that is to say, Movement is relatively independent of the number of components, the equivalent of our body, waist is a rotary degree of freedom We have to be able to hold his arm, Arm can be bent, then this three degrees of freedom, Meanwhile there is a wrist posture adjustment to the use of the three autonomy, the general robot has six degrees of freedom. We will be able to space the three locations, three postures, the robot fully achieved, and of course we have less than six degrees of freedom. Have more than six degrees of freedom robot, in different occasions the need to configure.The second category of service robots, with the development of industrialization,especially in the past decade, Robot development in the areas of application are continuously expanding, and now a very important characteristic, as we all know, Robot has gradually shifted from manufacturing to non-manufacturing and service industries, we are talking about the car manufacturer belonging to the manufacturing industry, However, the services sector including cleaning, refueling, rescue, rescue, relief, etc. These belong to the non-manufacturing industries and service industries, so here is compared with the industrial robot, it is a very important difference. It is primarily a mobile platform, it can move to sports, there are some arms operate, also installed some as a force sensor and visual sensors, ultrasonic ranging sensors, etc. It’s surrounding environment for the conduct of identification, to determine its campaign to complete some work, this is service robot’s one of the basic characteristics.For example, domestic robot is mainly embodied in the example of some of the carpets and flooring it to the regular cleaning and vacuuming. The robot it is very meaningful, it has sensors, it can furniture and people can identify, It automatically according to a law put to the ground under the road all cleaned up. This is also the home of some robot performance.The medical robots, nearly five years of relatively rapid development of new application areas. If people in the course of an operation, doctors surgery, is a fatigue, and the other manually operated accuracy is limited. Some universities in Germany, which, facing the spine, lumbar disc disease, the identification, can automatically use the robot-aided positioning, operation and surgery Like the United States have been more than 1,000 cases of human eyeball robot surgery, the robot, also including remote-controlled approach, the right of such gastrointestinal surgery, we see on the television inside. a manipulator, about the thickness fingers such a manipulator, inserted through the abdominal viscera, people on the screen operating the machines hand, it also used the method of laser lesion laser treatment, this is the case, people would not have a very big damage to the human body.In reality, this right as a human liberation is a very good robots, medical robots it is very complex, while it is fully automated to complete all the work, there are difficulties, and generally are people to participate. This is America, the development of such a surgery Lin Bai an example, through the screen, through a remote controloperator to control another manipulator, through the realization of the right abdominal surgery A few years ago our country the exhibition, the United States has been successful in achieving the right to the heart valve surgery and bypass surgery. This robot has in the area, caused a great sensation, but also, AESOP's surgical robot, In fact, it through some equipment to some of the lesions inspections, through a manipulator can be achieved on some parts of the operation Also including remotely operated manipulator, and many doctors are able to participate in the robot under surgery Robot doctor to include doctors with pliers, tweezers or a knife to replace the nurses, while lighting automatically to the doctor's movements linked, the doctor hands off, lighting went off, This is very good, a doctor's assistant.We regard this country excel, it should be said that the United States, Russia and France, in our nation, also to the international forefront, which is the CAS ShenYang Institute of Automation of developing successful, 6,000 meters underwater without cable autonomous underwater robot, the robot to 6,000 meters underwater, can be conducted without cable operations. His is 2000, has been obtained in our country one of the top ten scientific and technological achievements. This indicates that our country in this underwater robot, have reached the advanced international level, 863 in the current plan, the development of 7,000 meters underwater in a manned submersible to the ocean further development and operation, This is a great vote of financial and material resources.In this space robotics research has also been a lot of development. In Europe, including 16 in the United States space program, and the future of this space capsule such a scheme, One thing is for space robots, its main significance lies in the development of the universe and the benefit of mankind and the creation of new human homes, Its main function is to scientific investigation, as production and space scientific experiments, satellites and space vehicles maintenance and repair, and the construction of the space assembly. These applications, indeed necessary, for example, scientific investigation, as if to mock the ground some physical and chemical experiments do not necessarily have people sitting in the edge of space, because the space crew survival in the day the cost is nearly one million dollars. But also very dangerous, in fact, some action is very simple, through the ground, via satellitecontrol robot, and some regularly scheduled completion of the action is actually very simple. Include the capsule as control experiments, some switches, buttons, simple flange repair maintenance, Robot can be used to be performed by robots because of a solar battery, then the robot will be able to survive, we will be able to work, We have just passed the last robot development on the application of the different areas of application, and have seen the robots in industry, medical, underwater, space, mining, construction, service, entertainment and military aspects of the application .Also really see that the application is driven by the development of key technologies, a lack of demand, the robot can not, It is because people in understanding the natural transformation of the natural process, the needs of a wide range of robots, So this will promote the development of key technologies, the robot itself for the development of From another aspect, as key technology solutions, as well as the needs of the application, on the promotion of the robot itself a theme for the development of intelligent, and from teaching reappearance development of the current local perception of the second-generation robot, the ultimate goal, continuously with other disciplines and the development of advanced technology, the robot has become rich, eventually achieve such an intelligent robot mainstream.Robot is mankind's right-hand man; friendly coexistence can be a reliable friend. In future, we will see and there will be a robot space inside, as a mutual aide and friend. Robots will create the jobs issue. We believe that there would not be a "robot appointment of workers being laid off" situation, because people with the development of society, In fact the people from the heavy physical and dangerous environment liberated, so that people have a better position to work, to create a better spiritual wealth and cultural wealth.译文资料:机器人首先我介绍一下机器人产生的背景,机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中各国加强了经济的投入,就加强了本国的经济的发展。
可以搭建高楼大厦的机器人作文
可以搭建高楼大厦的机器人作文英文回答:Building a skyscraper is a complex task that requires precision, strength, and efficiency. To accomplish this, robots can play a crucial role in the construction process. Let's explore how robots can be used to build high-rise buildings.Firstly, robots can be used for site preparation. They can clear the land, remove debris, and level the ground before construction begins. This helps to create a solid foundation for the building. Additionally, robots equipped with sensors can analyze the soil composition and identify any potential risks or weaknesses.Secondly, robots can assist in the construction of the building's framework. They can lift heavy materials, such as steel beams and concrete panels, with ease and accuracy. This eliminates the need for manual labor and reduces therisk of injuries. Robots can also be programmed to assemble and connect these materials, ensuring precise alignment and structural integrity.Furthermore, robots can be employed for interior construction tasks. They can install electrical wiring, plumbing systems, and ventilation ducts with precision and efficiency. This not only saves time but also reduces the chances of human error. Robots can also paint walls, lay floor tiles, and perform other finishing touches, giving the building a polished and professional look.In addition to construction, robots can contribute to the maintenance and safety of high-rise buildings. They can inspect the structure for any signs of damage or wear, using sensors and cameras to detect potential issues. Robots can also clean windows, repair exterior surfaces, and even perform minor repairs. This reduces the need for human workers to perform risky tasks at great heights.中文回答:机器人可以在高楼大厦的搭建过程中发挥重要作用。
爬墙机器人设计
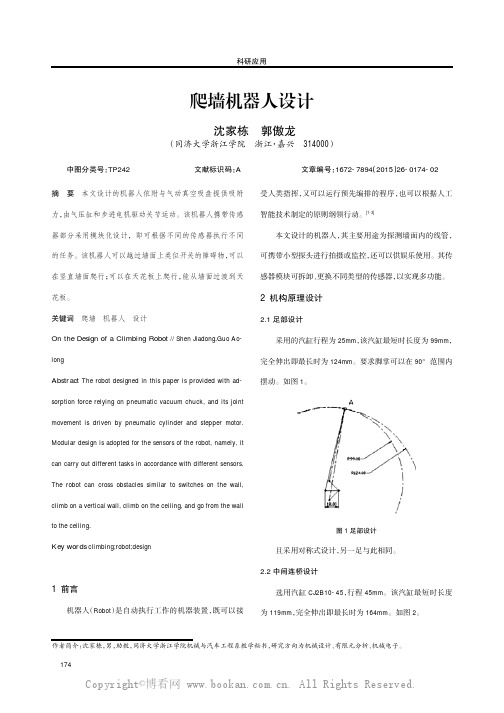
爬墙机器人设计沈家栋郭傲龙(同济大学浙江学院浙江·嘉兴314000)中图分类号:TP242文献标识码:A文章编号:1672-7894(2015)26-0174-02科研应用摘要本文设计的机器人依附与气动真空吸盘提供吸附力,由气压缸和步进电机驱动关节运动。
该机器人携带传感器部分采用模块化设计,即可根据不同的传感器执行不同的任务。
该机器人可以越过墙面上类似开关的障碍物,可以在竖直墙面爬行;可以在天花板上爬行,能从墙面过渡到天花板。
关键词爬墙机器人设计On the Design of a Climbing Robot//Shen Jiadong,Guo Ao-longAbstract The robot designed in this paper is provided with ad-sorption force relying on pneumatic vacuum chuck,and its joint movement is driven by pneumatic cylinder and stepper motor. Modular design is adopted for the sensors of the robot,namely,it can carry out different tasks in accordance with different sensors. The robot can cross obstacles similar to switches on the wall, climb on a vertical wall,climb on the ceiling,and go from the wall to the ceiling.Key words climbing;robot;design1前言机器人(Robot)是自动执行工作的机器装置,既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
The development trend of the robot1. Preface:Climbing robot is an important branch in the field of mobile robot, flexible mobile on vertical wall, replace artificial under the condition of the limit to complete various tasks, is one of the hotspot in research of the robot. It is mainly used in the nuclear industry, petrochemical industry, shipbuilding, fire departments and investigation activities, such as the building external wall cleaning, material storage tank in petrochemical enterprise testing and maintenance, the outer wall of large steel plate spray paint, and in building accident rescue and relief, etc., and achieved good social benefits and economic benefits, has wide development prospects.After 30 years of development, the field of robot which has emerged a large number of fruitful results, especially since the 1990 s, especially rapid development in the field of climbing robot at home and abroad. In recent years, due to the development of a variety of new technology, the robot which solved many technical challenges, greatly promote the development of the climbing robot. The robot design activities of universities in our country also has a wide development, this kind of atmosphere for our robot research and development of special and professional talents' cultivation is of positive significance.2. Climbing robot research status abroad1966 Japanese professor west light wall mobile robot prototype is developed for the first time, and performance success in Osaka prefecture university. This is a kind of rely on negative pressure adsorption climbing robot. Then appeared various types of climbing robot, has already begun to the late 80 s application in the production. Japan's most rapid development in the development of climbing robot, mainly used in the construction industry and nuclear industry. Such as: Japan shimizu construction company has developed with the outer wall of the building industry coating with ceramic tile of the robot, they developed by negative pressure adsorption cleaning climbing robot, on the surface of the glass for the Canadian embassy to clean. Tokyo university of technology development of the wireless remote control magnetic adsorption climbing robot. In Japan's miti "limit homework robot" national researchprojects, supported by day CDH, developed a large pot of negative pressure adsorption surface inspection robots used in nuclear power plants, etc.Other countries are also added to the climbing robot research upsurge, such as: Seattle Henry R Seemann under the funding of the Boeing company developed a vacuum adsorption crawler "AutoCrawler" robot. On the two tracks each containing a number of small adsorption chamber, with the moving of the crawler, adsorption chamber form continuous vacuum cavity and makes the crawler walking against the wall. American CaseWestern Reserve University developed by using four climbing robot prototype "legs". Similar to the first two robots, the robot depends on four "legs" on biomimetic viscous materials to adsorption, the prototype is the four legs wheel on the sole of the foot even special distribution is more advantageous to the robot stable crawling on the wall. The quality of the robot is only 87 g. Polytechnic school in the early 1990 s, British Portsmouth has developed a climbing robot multilegged walking type. Adopting modular design, the robot is composed of two similar modules, each module includes two mechanical legs and leg controller. According to the task need to install a different number of legs, reconfigurable ability. Mechanical legs using bionics mechanism, simulation of the large animals arm muscle function, is two type, including upper and lower two and three double-acting cylinder, with three degrees of freedom. Good stability and bearing capacity is big, the robot's lightweight, and can span bigger obstacles. In addition to the leg on one end of vacuum cups, robot equipped with suction cups, abdomen mass ratio of powder and make the robot has a larger load of 2:1.3. Climbing robot research status in ChinaChina is also in a similar study since the 1990 s. In 1988 at the national "863" high technology program, under the support of the robotics institute of Harbin institute of technology has successfully developed the use of magnetic adsorption and vacuum adsorption two series of five types of wall climbing robot. Successful development of the our country the first wall climbing robot remote detection, using negative pressure adsorption, omni-directional mobile wheel, used for nuclear waste storage jars of wall weld defect detection. Developed in 1994 for tall buildings wallclimbing robot cleaning CLR - Ⅰ, adopts the omni-directional mobile mechanism, the robot in situ can arbitrarily change the direction of movement. After the development of the CLR - Ⅱ, driven by two independent ways -- coaxial two-wheeled differential mechanism, through the coordination of two rounds of speed control to realize the omni-directional mobile robot, the robot ontology and using power line carrier communication methods between the ground control station. Above-mentioned three climbing machine adopts single suction cup structure, spring air sealed, ensure the crawl robot with high speed and reliable adhesion ability. In 1995 successfully developed the metal corrosion by magnetic adsorption climbing robot, structure of permanent magnetic adsorption, accomplished by two tracks positive &negative mobile turn. The robot can do for petrochemical enterprises to the outer wall of the metal material storage tank to spray paint, sandblasting, as well as with automatic detection system to test the tank wall thickness. Developed in 1997's detection of water wall climbing robot, a circular permanent magnet adsorption block in conformity with the tank wall arc, improve the adsorption capacity, and improve the efficiency of the operation. Shanghai university also conducted early tall wall cleaning robot research, successively developed a vertical wall climbing robot and spherical wall climbing robot. The spherical wall climbing robot adopts many suckers, negative pressure adsorption, 6 foot independent driving leg feet walking style, can be used for different radius of curvature of the spherical outer wall since 1996, the Beijing university of aeronautics and astronautics has successfully developed WASH2 MAN, CLEANBOT 1, SKYCLEAN, "hanging basket type window robot" and "LanTianJie treasure" curtain wall cleaning robot prototype. For all the window is brushed pneumatic robot; Hanging basket type cleaning robot, the robot depends on the roof of the safety line traction, attached with the negative pressure made by fan robot on the wall in the application background of national grand theatre ellipsoid ceiling cleaning developed suitable for complex curved surface from climbing robot prototype, the climbing mechanism, mobile mechanism, cleaning robot has many similarities, but due to its special working environment and mission requirements, in terms of theory and technology has some particularity.4. The key technology of robot:4.1 adsorption mechanism, adsorption mechanism of action is to produce an upward force to balance the gravity of the robot, keep it on the wall. Currently, magnetic adsorption methods mainly include vacuum negative pressure adsorption, adsorption, propeller thrust and binder etc. Several ways. Due to the adsorption methods each have limitations, climbing robot developed by often targeted strong, applies only to a specific task, difficult to generalize. Robot design need to work on task, environment, choose the right means of adsorption. In recent years, people through the study of the adsorption mechanism of gecko reptiles such as the soles of your feet, making the polymer synthesis of viscous material, the use of van der Waals force between the molecules and molecular materials, can be obtained on the contact area of small huge adsorption capacity, and has the advantages of adsorption has nothing to do with the surface material properties. Short life but at the moment, the use of these materials, the use of a certain number of times after lose viscosity, practical, need further study.4.2 mobile mechanism and motion control system: mobile mechanism and the movement control system of robot which major wheeled mobile mechanism, more foot type, such as caterpillar, among them, the wheel and foot type which has been widely used, caterpillar much for magnetic adsorption method. Obstacle ability is wall robot which used to an important indicator of performance. When work surface is convex, groove, the robot to go through these obstacles, we must have enough obstacle ability. All kinds of mobile mechanism, more foot type robot obstacle-navigation ability is stronger, its each leg small suction cup is placed, when faced with obstacles, can control the "leg", make the small suction cup across the obstacles one by one. Wall mobile mechanism of the robot can make the robot on the premise of reliable adsorption can move on the wall. Due to the particularity of climbing robot working in wall, mobile mechanism and adsorption mechanism exists coupling, which brought some difficulties to the robot's motion control. Than climbing robot sucker foot type and legs with a suction cup at the end, every move a leg needs to be done "to eliminate suction - leg - Wallace leg, left leg - generateadsorption force" a series of actions. In this process, the robot mobile mechanism of the action should coordinate with each other, and the adsorption mechanism to to guarantee the flexible mobile robot on the wall. In addition, there is also a mobile mechanism and adsorption separation, such as single suction cups, robot sucker adsorption, sustainable continuous movement of driving wheel mobile robot, motion control is relatively simple.Energy supply and drive mode: 4.3 the driving mode of energy supply and energy supply way with people via the wire line for the machine to provide energy such as electricity, gas, also has a built-in battery, cylinders and so on. Drive ways mainly have the pneumatic motor and other several ways. Climbing robot is designed to adopt high efficiency quality than drive and source of power, especially the wireless control cases. Using motor drive, energy supply mainly include polymer lithium battery, nickel metal hydride batteries, electrochemical batteries and fuel cells. In addition, due to the energy of internal combustion engine - - gasoline, hydrogen fuel can have higher weight ratio, such as advanced micro internal combustion engine can also be applied to the climbing robot.Safety problems: 4.4 the robot by interference, environmental change circumstances, how to ensure the safety of the robot is attached to the wall without falling, falling or after how to minimize the damage of the robot. The past buildings cleaning climbing robot, developed by most used by in carrying the car at the top of the tower, hoisting and wire rope of insurance system on the robot. Robot for some other purposes, such as detection with small climbing robot, the goal is not sure, cannot use the rope way of insurance, so need to study new way to prevent falling. Could consider using a parachute, small power into a pulp, fast supporting resistance drop plate, etc., these may be a future development direction of climbing robot safety measures.5. Development trend of the robotHard drive, sensor and control the development of software technology has greatly promoted the development of climbing robot technology, the demand of the practical application is also put forward the challenge, the development of robotclimbing robot development trend in the aggregate, basically has the following several aspects. (1) the development of new adsorption technology. Adsorption technology has been a bottleneck of the development of the robot, it determines the application range of the robot. (2) the task of robot from simplification to muti_function change direction. The past most climbing robot which is used for washing, spraying, detection and so on homework, homework tasks are often confined to a single task. Now people want climbing robot can equipped with a variety of tools, are working on different occasions. (3) the miniaturization, micromation is currently the trend of the development of the robot. On the premise of meet the functional requirements, small volume, light quality of robot can be less energy consumption, high flexibility, and in some special occasions are also need robot with small volume. (4) by the mooring operation development to the direction of untethered. Because the robot working space is generally larger, mooring operation greatly limits the robot working space, so, in order to improve the flexibility of robot and expand the working space, no cable is changed and is now and the future development trend of the robot. (5) by simple remote monitoring to intelligent direction. Combined with artificial intelligence, the robot can in a closed environment has a certain capacity for independent decision and complete the task, and have ego to protect ability, is the important direction of mobile robot, is also a important development direction of mobile robot climbing wall. (6) the adaptability of the reconfigurable robot is an important indicator. In order to make the robots could be used in different occasions, according to the mission requirements, under the condition of the system does not need to design, make full use of existing robot system, should make with reconfigurable robot, which has a modular structure. According to the mission requirements, the need of module is directly connected to form a new robot.译文:1.引言:爬壁机器人是移动机器人领域的一个重要分支,可在垂直壁面上灵活移动,代替人工在极限条件下完成多种作业任务,是当前机器人领域研究的热点之一。