系统建模与仿真习题1及答案
系统建模与仿真答案
1名词解释:(1)系统:按照某种规律组合起来,互相作用、互相依存的所有实体的集合或总和(2)连续系统:系统状态量随时间连续变化,可以通过微分方程或者偏微分方程来描述。
(3)离散事件系统:系统状态是在离散的随机时点上发生变化,且状态在一段时间内保持不变(4)系统仿真过程:建立模型并通过模型在计算机上的运行对模型进行检验、修正和分析的过程2、什么是系统建模与仿真技术?系统建模与仿真技术是以相似原理、模型理论、系统技术、信息技术以及建模与仿真应用领域的有关专业技术为基础,以计算机系统、与应用相关的设备及仿真器为工具,利用模型参与已有或设想的系统进行研究、分析、设计、加工、生产、试验、运行、评估、维护和报废(全生命周期)活动的一门多学科的综合技术。
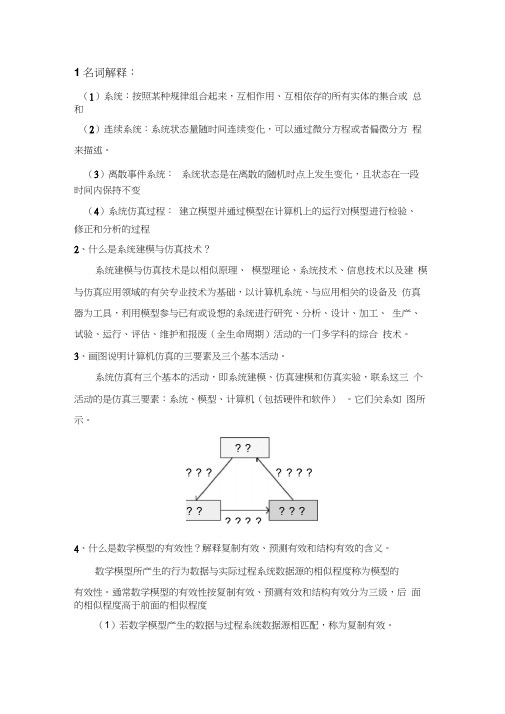
3、画图说明计算机仿真的三要素及三个基本活动。
系统仿真有三个基本的活动,即系统建模、仿真建模和仿真实验,联系这三个活动的是仿真三要素:系统、模型、计算机(包括硬件和软件)。
它们关系如图所示。
4、什么是数学模型的有效性?解释复制有效、预测有效和结构有效的含义。
数学模型所产生的行为数据与实际过程系统数据源的相似程度称为模型的有效性。
通常数学模型的有效性按复制有效、预测有效和结构有效分为三级,后面的相似程度高于前面的相似程度(1)若数学模型产生的数据与过程系统数据源相匹配,称为复制有效。
(2)在过程系统数据源取得之前,可以得到数学模型产生的数据与过程系统数据源的匹配情况,称为预测有效。
(3)数学模型不仅具有预测有效特性,而且可以反映出产生这些行为数据的内在原因,称为结构有效。
5、动态数学模型求解的实时性要求是什么?常用哪些方法提高实时性?动态数学模型运行特点是按选定的积分时间步长,每跨进一个步长,需将全部数据模型求解一遍,一直运行到收到停止命令。
经验证明:积分步长选1s 可以达到实时要求。
提高模型实时性常用的方法有:(1)通过预先试算找出规律,尽量避开非线性代数方程组的迭代计算;(2)使用回归或者辨识的方法获取简化降阶模型;(3)使用欧拉法求解高阶微分方程;(4)偏微分方程简化为常微分方程;(5)采用稳态加动态补偿方法获取动态响应。
系统建模与仿真考试题

1.信息时代认识世界(科学研究)的三种方法是:理论研究、(_实验研究_)、(__仿真___)。
2.根据系统状态随时间变化是连续性还是间断性的,可将系统划分为(_连续系统_)、(__离散系统__)。
3.系统仿真中的三个基本概念是系统、(__模型_)、仿真。
4.拟对某系统进行研究,首先要对系统作出明确的描述,即确定系统各个要素:实体、属性、活动、(__状态_)、(_事件___)。
•阶段性知识测试5.系统仿真有三个基本的活动,即系统建模、仿真建模和(__仿真实验__),联系这三个活动的是系统仿真的三要素,即系统、模型和计算机(硬件和软件)。
6.系统仿真的一般步骤是:(1)调研系统,明确问题、(2)(___设立目标,收集数据__)、(3)建立仿真模型、(4)编制程序、(5)运行模型,计算结果、(6)(_统计分析,进行决策__)•阶段性知识测试7.仿真软件发展经历了四个阶段(1)高级程序语言阶段;(2)仿真程序包、初级仿真语言阶段;(3)商业化仿真语言阶段;(4)(_一体化建模与仿真环境_)阶段。
8.常用的仿真软件有Arena、Automod、MATLAB、Promodel、(__WITNESS______)、(______FLEXSIM___)。
9.求解简单系统问题的“原始”方法是(___解析解决____),借助(___实验__)可大大提高该方法的效率和精度。
•阶段性知识测试10.排队系统可简化表示为A/B/C/D/E。
其中A为到达模式;B为(服务模式)、C为服务台数量、D为系统容量;E为排队规则。
11.常见的排队规则有:先到先服务、后到后服务、优先级服务、最短处理时间优先服务、随机服务等。
请以连线方式将下列排队规则名称的中英文对照起来。
先进先出FIFO后进先出LIFO随机服务SIRO最短处理时间优先SPT优先级服务PR•阶段性知识测试12.模型中,习惯称实体为成分。
成分可分为主动成分和被动成分。
请问排队系统中的随机到达的顾客属于(主动)成分(主动/被动)。
系统建模与仿真_考题答案

共10题 每题10分1、什么是数学建模形式化的表示?试列举一例说明形式化表示与非形式化表示的区别;模型的非形式描述是说明实际系统的本质,但不是详尽描述。
是对模型进行深入研究的基础。
主要由模型的实体、包括参变量的描述变量、实体间的相互关系及有必要阐述的假设组成。
模型的非形式描述主要说明实体、描述变量、实体间的相互关系及假设等。
例子:环形罗宾服务模型的非形式描述:实体CPU ,USR1,…,USR5描述变量CPU:Who,Now(现在是谁)----范围{1,2,…,5}; Who.Now=i 表示USRi 由CPU 服务。
USR :Completion.State (完成情况)----范围[0,1];它表示USR 完成整个程序任务的比例。
参变量i X -----范围[0,1];它表示USRi 每次完成程序的比率。
实体相互关系(1)CPU 以固定速度依次为用户服务,即Who.Now 为1,2,3,4,5,1,2…..循环运行。
(2)当Who.Now=I,CPU 完成USRi 余下的i X 工作。
假设:CPU 对USR 的服务时间固定,不依赖于USR 的程序;USRi 的进程是由各自的参变量i X 决定。
2、模型描述变量化简的四种方法比较;建模过程中,在能满足建模的前提下,系统的描述变量应是愈简单愈好。
模型描述变量一般有以下四种方法:(1)、淘汰一个或多个实体、描述变量或相互关系规则;建模者决定淘汰那些次要因素,只要忽略的因素不会显著地改变整个模型行为,相反却使不必要的复杂了。
淘汰一个实体可能要淘汰或修改其他实体:淘汰一个实体,需要淘汰所有涉及这个实体的描述变量;淘汰一个描述变量,需要淘汰或修改涉及该变量的相互关系。
(2)、随机变量取代确定性变量;在一个确定性模型中,相互关系的规则控制着整个描述变量的值。
有些随机值也是由相互关系的规则确定,为了使模型相对简化,可利用概率原理,用随机变量来取代某些变量的相互关系规则,从而将影响变量转换成随机变量。
系统建模控制与仿真 习题及解答

1、工业控制系统可分为几种大类型,各有什么特点?适合的应用领域。
答:工业控制系统可分为分布式控制系统(DCS )和可编程逻辑控制器(PLC )两大类型。
分布式控制系统(DCS ))是以微处理机为基础,以危险分散控制,操作和管理集中为特性的新型控制系统,它具有高可靠性、开放性、灵活性、协调性、易于维护、控制功能齐全等特点,属于过程控制系统,主要控制手段是PID ,适用于流程工业; 可编程逻辑控制器(PLC )是一种专门为在工业环境下应用而设计的数字运算操作的电子装置,它的特点有可靠性高、抗干扰能力强、硬件配套齐全、功能完善、适用性强、易学易用、容易改造、体积小、重量轻、能耗低等,属于离散控制系统,主要控制手段是顺序与逻辑控制,适用于制造业,目前,已广泛应用于钢铁、石油、化工、电力、建材、机械制造、汽车、轻纺、交通运输、环保及文化娱乐等各个行业。
2、根据自己的理解简述现代控制理论的发展历史,分析为什么现代控制理论在过程控制系统中难以应用?答:现代控制理论是为了分析多输入多输出系统、非线性系统和时变系统而出现的,先是贝尔曼等人提出状态分析法,接着卡尔曼等人提出状态空间法,后来,罗森布洛克等人将经典控制理论传递函数的概念推广到多变量系统,并探讨了传递函数矩阵与状态方程之间的等价转换关系,与此同时,系统辨识、最优控制、离散时间系统和自适应控制的发展大大丰富了现代控制理论的内容。
现代控制理论之所以难以在过程控制系统中应用,有以下几个主要原因:1) 现代控制理论获得较好效果的前提是系统内部结构参数完全已知,并且很精确,而过程控制系统中系统参数一般都是经常变化的,在每次重新开机之后系统参数都会发生变化2) 现代控制理论对系统状态变量采用的是微分运算,对各种干扰非常敏感,而过程控制系统中的干扰非常多,因此在过程控制系统中运用现代控制理论经常得不到好的结果,甚至出现错误的结果,现代控制理论适用于航天、实验室等干扰很少的场合3) x Ax Bu ∙=+;y Cx =中,输出并不在闭环内部,因此现代控制理论不能保证输出具有稳定性4) 现代控制理论在解决现实问题中为了保证系统的稳定性,一般会采用模糊化,这样做的代价是大大降低系统的精确性、快速性5) 在过程控制系统中应用现代控制理论后得到的结果往往不如直接运用PID 后得到的结果好3、什么是串级控制系统?其两个回路各有什么特点?答:串级控制系统是两只调节器串联起来工作,其中一个调节器的输出作为另一个调节器的给定值的系统。
《电力电子系统建模与仿真》题集

《电力电子系统建模与仿真》题集一、选择题(每题2分,共20分)1.在电力电子系统建模过程中,哪一种软件工具常被用于进行系统级仿真分析?( )A. Microsoft OfficeB. AutoCADC. MATLAB/SimulinkD. Photoshop2.PWM (脉宽调制)技术中,通过调节什么参数来控制开关管的导通时间?( )A. 电压幅值B. 电流频率C. 脉冲宽度D. 电容容量3.在Simulink环境中,哪个模块库提供了丰富的电力电子元件模型用于系统仿真?( )A. Simulink Control DesignB. SimPowerSystemsC. Communications System ToolboxD. Robotics System Toolbox4.电力电子系统建模的主要目的是什么?( )A. 提高系统美观性B. 分析和优化系统性能C. 增加系统复杂性D. 降低系统成本5.在进行电力电子系统仿真时,哪个因素对于仿真结果的准确性至关重要?( )A. 计算机的显示器尺寸B. 元器件模型的精度C. 仿真软件的安装位置D. 操作系统的版本6.SPWM (正弦脉宽调制)技术主要应用于哪种电力电子变换器?( )A. DC-DC变换器B. AC-DC整流器C. DC-AC逆变器D. AC-AC变频器7.PID控制器在电力电子系统中主要起什么作用?( )A. 增加系统噪声B. 提高系统稳定性C. 降低系统效率D. 增加系统功耗8.在电力电子系统仿真中,设置合适的仿真步长对结果有何影响?( )A. 不影响仿真结果B. 提高仿真速度但降低精度C. 平衡仿真速度和精度D. 只影响仿真过程中的动画效果9.电力电子系统中的核心元件是什么?( )A. 电阻和电容B. 电感和变压器C. 电力电子开关器件D. 传感器和执行器10.在进行DC-DC变换器仿真时,需要关注哪些性能指标?( )A. 变换效率和输出电压纹波B. 变换器的重量和体积C. 变换器的颜色和材质D. 变换器的生产厂家和品牌二、填空题(每题2分,共20分)1.电力电子系统建模中,常用的两种仿真方法是________________和________________。
西北工业大学智慧树知到“电气工程及其自动化”《系统建模与仿真》网课测试题答案卷1

西北工业大学智慧树知到“电气工程及其自动化”《系统建模与仿真》网课测试题答案(图片大小可自由调整)第1卷一.综合考核(共10题)1.UML基础包分为()。
A.核心包B.辅助元素包C.扩展机制包D.数据类型包2.Simulink模型通常包括()组件。
A.信源B.信宿C.系统D.用户3.描述系统内与值的变化有关系的系统属性是()。
A.静态模型B.功能模型C.动态模型D.随机模型4.UML行为元素包中,描述系统功能的是合作包。
()A.错误B.正确5.常用的连续系统数学模型有()。
A.微分方程模型B.积分方程模型C.传递函数模型D.状态空间模型6.由于大多数微分方程是求不出其解析解的,因此研究其()和数值解法是十分重要的手段。
A.离散性B.连续性C.非稳定性D.稳定性7.在库存系统中,需求与定货的不断发生,使得库存量呈现动态变化。
()A.错误B.正确8.对系统的描述,一般可以分为行为级、状态结构级和结构分解级三级,其中,最低一级是行为一级,在这一级系统被视为黑箱。
()A.错误B.正确9.在系统建模准备阶段工作完成之后,需要进行下列哪个阶段的工作?()A.系统建模阶段B.系统认识阶段C.系统求解阶段D.系统优化阶段10.智能仿真技术的开发途径是()。
A.理论计算B.人工智能C.仿真技术的集成化D.互联网第1卷参考答案一.综合考核1.参考答案:ABCD2.参考答案:ABC3.参考答案:B4.参考答案:A5.参考答案:ACD6.参考答案:D7.参考答案:B8.参考答案:B9.参考答案:B10.参考答案:BC。
智慧树知到《数学建模与系统仿真》章节测试答案

智慧树知到《数学建模与系统仿真》章节测试答案第一章单元测试1.数学模型是根据特定对象和特定目的,做出必要假设,运用适当数学工具得到一个数学结构的理论表述。
答案:对2.数学建模是利用数学方法解决实际问题的一种实践。
通过抽象、简化、假设、引入变量等处理过程后,将实际问题用数学方式表达,建立起数学模型,然后运用先进的数学方法及计算机技术进行求解,是对实际问题的完全解答和真实反映,结果真实可靠。
答案:对3.数学模型是用数学符号、数学公式、程序、图、表等刻画客观事物的本质属性与内在联系的理想化表述。
数学建模就是建立数学模型的全过程(包括表述、求解、解释、检验)。
答案:对4.数学模型(Mathematical Model)强调的是过程;数学建模(Mathematical Modeling)强调的是结果。
答案:错5.人口增长的Logistic模型表明人口增长过程是先快后慢。
答案:对6.MATLAB的主要功能包括符号计算、绘图功能、与其他程序语言交互的接口和数值计算。
答案:符号计算、绘图功能、与其他程序语言交互的接口、数值计算7.Mathematica的基本功能包括语言功能(Programing Language)、符号运算(Algebric n)、数值运算(XXX)和图像处理(Graphics)。
答案:语言功能(Programing Language)、符号运算(Algebric n)、数值运算(Numeric n)、图像处理(Graphics)8.数值计算是Maple、MATLAB和Mathematica的主要功能之一。
答案:Maple、MATLAB、XXX9.评阅数学建模论文的标准包括表述的清晰性、建模的创造性和论文假设的合理性。
答案:表述的清晰性、建模的创造性、论文假设的合理性10.中国(全国)大学生数学建模竞赛(CUMCM)每年举办一次。
该竞赛开始于70年代初。
答案:一年举办一次,开始于70年代初。
10、微分方程模型可以用于描述物体动态变化过程,并且可以用来预测对象特征的未来状态。
(完整)系统建模与仿真习题答案(forstudents)
第一章习题1-1什么是仿真?它所遵循的基本原则是什么?答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。
它所遵循的基本原则是相似原理。
1-2在系统分析与设计中仿真法与解析法有何区别?各有什么特点?答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,计算。
它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。
由于受到理论的不完善性以及对事物认识的不全面性等因素的影响,其应用往往有很大局限性.仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法.1-3数字仿真包括那几个要素?其关系如何?答: 通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与计算机。
由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题;将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验.1—4为什么说模拟仿真较数字仿真精度低?其优点如何?.答:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真。
(2)仿真速度极快,失真小,结果可信度高。
(3)能快速求解微分方程.模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关.(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真.(5)易于和实物相连。
1-5什么是CAD技术?控制系统CAD可解决那些问题?答:CAD技术,即计算机辅助设计(Computer Aided Design),是将计算机高速而精确的计算能力,大容量存储和处理数据的能力与设计者的综合分析,逻辑判断以及创造性思维结合起来,用以加快设计进程,缩短设计周期,提高设计质量的技术.控制系统CAD可以解决以频域法为主要内容的经典控制理论和以时域法为主要内容的现代控制理论。
《系统建模与仿真》作业题1
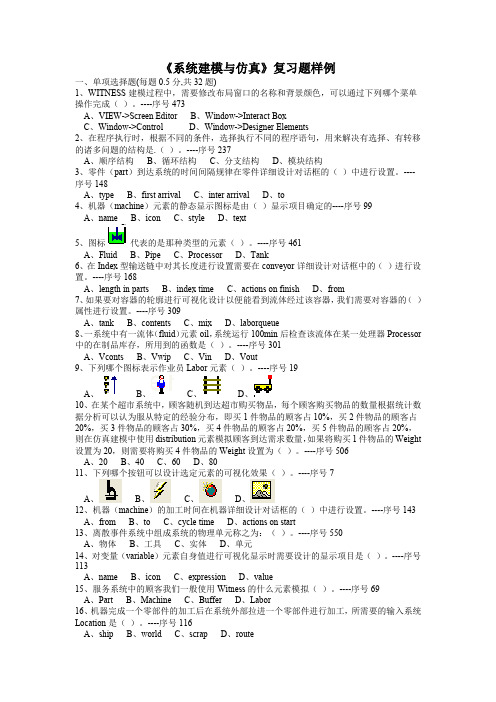
《系统建模与仿真》作业第一次(共两次)布置作业时间:“经典建模法”结束后 要求交作业时间:从布置日开始不超过1周 作业量:共3道题第1题——体现电气系统经典建模[题目] 在如图所示的电路中,R 表示一个电阻,L 表示一个电感,C 表示一个电容,i 表示电流强度,u 表示输入电压,c u 表示电容器的输出电压。
试写出一个状态空间数学模型。
u图1 典型的RLC 电路第2题——体现机械系统经典建模[题目]如图2是一个文字处理器打印轮轴控制系统的简化图。
打印轮轴由一个直流电动机通过皮带和滑轮进行控制。
假设皮带是刚性的,电动机与皮带轮之间的连接也是刚性的,并定义如下的参数和变量:m ()T t 是电动机的力矩;m ()t 是电动机的角位移;()y t 是打印轮轴的线性位移;m J 式电动机的惯量;m B 是电动机的粘性摩擦系数;K 是扭转轴的刚性系数;r 是滑轮的半径;M 是打印轮轴的质量。
(1)写出系统的微分方程;(2)写出系统的传递函数模型m ()()Y s T s 。
T打印轮轴图2 打印轮轴控制系统简化图第3题——体现热工过程经典建模汽轮机高压加热器疏水系统的原理框图如图3所示,其中各段抽汽的压力大小关系为321p p p >>,抽汽温度大小关系为321T T T >>。
给水流量w 和给水温度T 一般来说为两个随机变量。
三个疏水管道阀门的开度为归一化量,即]1,0[,,321∈u u u 。
三个高压加热器的疏水水位分别为1y ,2y ,3y 。
它们的关系可描述为),,,(111111T w T p f u k y+-= ),,,(22223122T w T p f u k u k y+-= ),,,(T w T p f u k u k y+-=图3 汽机高加疏水系统原理框图式中的),,,(111T w T p f ,),,,(222T w T p f ,),,,(333T w T p f 表示系统的不确定干扰,1k ,2k ,3k ,4k ,5k 表示适当的正常数。
物联网系统建模与仿真智慧树知到课后章节答案2023年下长春大学

物联网系统建模与仿真智慧树知到课后章节答案2023年下长春大学长春大学第一章测试1.仿真模型十分强大,能够做到与真实系统一一对应。
答案:错2.物流系统是由多个既互相区别又互相联系的单元结合起来,以货物为工作对象,以完成货物实体流动为目的的有机结合体。
答案:对3.信息时代认识世界(科学研究)的三种方法是理论研究、实验研究、仿真研究。
答案:对4.系统是研究的对象,仿真是系统的抽象。
答案:错5.仿真模型的优点是形式规范,通常能够求得确定的最优解。
答案:对6.仿真系统中三个基本概念是( )。
答案:系统;模型;仿真7.属于一个银行服务系统中的元素有( )。
答案:ATM机;顾客;银行员工;柜员窗口8.下列属于符号模型的是( )。
答案:流程图9.仿真项目研究步骤中的最后一步是( )。
答案:实验运行和结果分析10.模型验证(Validation)的作用是( )。
答案:查看模型是否与实际情况相符第二章测试1.当现有对象库不能满足模型需要时,用户可以创建自己的对象。
答案:对2.Flexsim仿真软件只能进行二维平面模型展示。
答案:错3.Flexsim建模的基本步骤和顺序为构建模型布局、定义对象流程、编辑对象参数、运行仿真模型、分析仿真结果。
答案:对4.构建模型布局步骤中绘制图纸的过程在建立简单模型时可以省略答案:对5.关于端口连接的显示位置,下列说法错误的是( )。
答案:中心端口显示在对象顶部中心6.打开对象属性窗口,对打开连接不能进行的操作是( )。
答案:添加端口连接7.下列哪些不属于Flexsim软件仿真控制栏的功能按钮?答案:后退8.下列不能通过实体的属性参数进行设定的是( )。
答案:数量9.下列属于仿真软件的是( )。
答案:Flexsim;Arena;Witness10.下列属于固定资源对象的是( )。
答案:回收器;发生器第三章测试1.设置邮局窗口服务的时间需要对哪种对象进行设置?答案:处理器2.顾客分流到不同服务窗口,应如何对暂存区的“发送至端口”属性进行设置?答案:按比例分配3.使用合成器时,哪个输入端口的临时实体将作为容器盛装来自其他端口的临时实体?答案:第一个端口4.操作员要进行文件处理和文件搬运,处理器的优先级为2,若先进行文件处理,运输的优先级应设置为( )。
系统仿真技术阶段练习一及答案

系统仿真技术阶段练习⼀及答案系统仿真技术阶段练习⼀第⼀章:计算机仿真技术概述1.系统的概念,系统的边界。
2.模型的定义。
3.简述模型型谱。
4.仿真的定义。
5. 仿真三要素及三项基本活动之间的关系。
6.按照状态变量的特点,系统怎么分类?第⼆章数学建模⽅法1.什么是机理建模,对典型的RLC 电路进⾏建模。
2.什么叫做数据建模?数据建模的前提及主要⽅法。
3. 什么叫系统辨识,常见的系统辨识⽅法。
⿊箱⽩箱经济⽣理经济过程控制动⼒学电⼦电路集中参数常微分⽅程分布参数偏微分⽅程离散时间差分⽅程4.最⼩⼆乘的定义,公式?5.简述模糊建模、神经⽹络建模、模糊神经⽹络建模的定义,特点。
第⼀章:计算机仿真技术概述1.系统的概念,系统的边界。
答:A system can be defined as a set of component which are related by some forms of interaction ,and which act together to achieve some objective or purpose.在定义⼀个系统时,⾸先要确定系统的边界。
尽管世界上的事物是相互联系的,但当我们研究某⼀对象时,总是要将该对象与其环境(environment)区别开来。
边界确定了系统的范围。
边界以外对系统的作⽤称为系统的输⼊,系统对边界以外的环境的作⽤称为系统的输出。
2.模型的定义。
答:是对真实系统中那些有⽤的和令⼈感兴趣的特性的抽象化。
模型并不是对真实系统的完全复现。
如果M 能够⽤来回答关于系统(S)的问题,并且在精度范围A 之内,那末M 就是系统S 的模型。
3.简述模型型谱。
答:⽩箱:运⾏机理了解⽐较深⼊,基本上可以通过演绎的⽅法来建⽴模型;灰箱:对系统不太了解,要通过演绎和归纳相结合的⽅法来建⽴模型;⿊箱:对系统了解不太清楚,主要通过系统辨识的⽅法或数据收集和统计归纳的⽅法来建⽴模型,由于数据掌握得不够多,模型精度⼀般⽐较差。
《系统建模与仿真》复习题
《系统建模与仿真》复习题样例一、单项选择题(每题0.5分,共32题)1、WITNESS建模过程中,需要修改布局窗口的名称和背景颜色,可以通过下列哪个菜单操作完成()。
----序号473A、VIEW->Screen EditorB、Window->Interact BoxC、Window->ControlD、Window->Designer Elements2、在程序执行时,根据不同的条件,选择执行不同的程序语句,用来解决有选择、有转移的诸多问题的结构是.()。
----序号237A、顺序结构B、循环结构C、分支结构D、模块结构3、零件(part)到达系统的时间间隔规律在零件详细设计对话框的()中进行设置。
----序号148A、typeB、first arrivalC、inter arrivalD、to4、机器(machine)元素的静态显示图标是由()显示项目确定的----序号99A、nameB、iconC、styleD、text5、图标代表的是那种类型的元素()。
----序号461A、FluidB、PipeC、ProcessorD、Tank6、在Index型输送链中对其长度进行设置需要在conveyor详细设计对话框中的()进行设置。
----序号168A、length in partsB、index timeC、actions on finishD、from7、如果要对容器的轮廓进行可视化设计以便能看到流体经过该容器,我们需要对容器的()属性进行设置。
----序号309A、tankB、contentsC、mixD、laborqueue8、一系统中有一流体(fluid)元素oil,系统运行100min后检查该流体在某一处理器Processor 中的在制品库存,所用到的函数是()。
----序号301A、VcontsB、VwipC、VinD、Vout9、下列哪个图标表示作业员Labor元素()。
浙江工商大学系统建模与仿真课后习题答案

参考教材:离散事件系统建模仿真及GPSSWorld 教程,译作者:谢毅缪亚萍,出版社:清华大学出版社,年代:2011部分习题答案:(具体题目信息省略)第二章:2.16(双理发师手工仿真)理发师1利用率:49/58理发师2利用率:28/58时钟系统状态时间表统计计数器StQ (t )StS1(t )StS2(t )C B1B2W 0000A (1,5)00005010D (1,23),A (2,11)00011012D (1,23),D (2,31),A (3,19)060019112D (1,23),D (2,31),A (4,38)0148023032D (2,31),D (3,38),A (4,38)11812431030D (3,38),A (4,38)2262043800A (4,38)333204040D (4,54),A (5,50)33320450045D (4,54),D (5,66),A (6,58)34520454005D (5,66),A (6,58)4492445865D (6,74),D (5,66),A (7,…)449284平均等待时间:4/6(min)第三章:3.3(货物出库)GENERATE10,5 TERMINATE10 GENERATE15 TERMINATE20 GENERATE30,10 TERMINATE50START20003.4(零件加工)GENERATE20,5ADD1QUEUE Q_ASEIZE ADEPART Q_AADVANCE16,5RELEASE AQUEUE Q_BSEIZE BDEPART Q_BADVANCE15,10RELEASE BQUEUE Q_CSEIZE CDEPART Q_CADVANCE10,2RELEASE C TRANSFER0.05,ADD2,ADD1ADD2TERMINATEGENERATE60TERMINATE1START40(仿真4个小时)若为生产200个合格零件,则ADD2改为:ADD2TERMINATE1START200(仿真4个小时)3.6(加工中心)S_A STORAGE2S_B STORAGE1S_C STORAGE3S_D STORAGE5GENERATE20,10QUEUE Q_AENTER S_ADEPART Q_AADVANCE30,15LEAVE S_ATRANSFER0.6,ADDC,ADDBADDC ENTER S_CADVANCE70,20LEAVE S_CTRANSFER,ADDDADDB ENTER S_BADVANCE20,10LEAVE S_BTRANSFER0.2,ADDD,ADDC ADDD ENTER S_DADVANCE90,30LEAVE S_DTERMINATEGENERATE60TERMINATE1START1003.7(汽车清洗店,顾客有偏好)注:可用BOTH或是ALL模式,但是相对比较复杂,可用SELECT,实现更简单。
系统建模与仿真习题1及答案
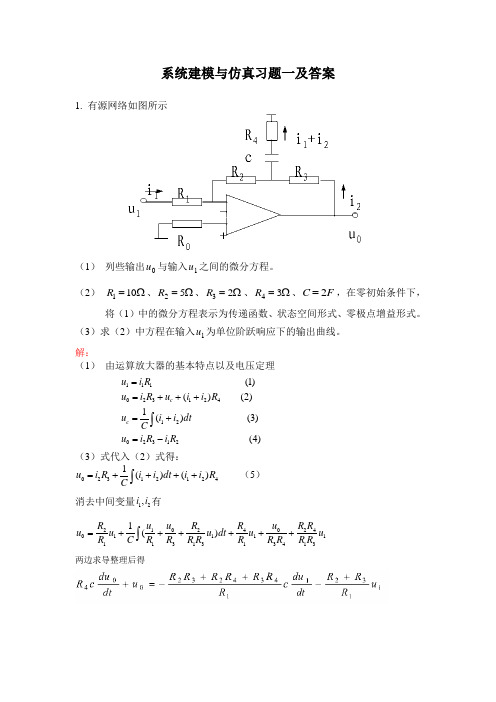
系统建模与仿真习题一及答案1. 有源网络如图所示(1) 列些输出0u 与输入1u 之间的微分方程。
(2) Ω=101R 、Ω=52R 、Ω=23R 、Ω=34R 、F C 2=,在零初始条件下,将(1)中的微分方程表示为传递函数、状态空间形式、零极点增益形式。
(3)求(2)中方程在输入1u 为单位阶跃响应下的输出曲线。
解:(1) 由运算放大器的基本特点以及电压定理)4()3()(1)2()()1(2132021421320111R i R i u dt i i Cu R i i u R i u R i u c c -=+=+++==⎰(3)式代入(2)式得:42121320)()(1R i i dt i i C R i u ++++=⎰ (5)消去中间变量21,i i 有13142430114131230111120)(1u R R R R R R u u R R dt u R R R R u R u C u R R u ++++++=⎰ 两边求导整理后得(2)代入数据可以得到微分方程为:11007.02.610u u u u--=+ 程序如下:clc;clear;num=[-6.2 -0.7]; den=[10 1]; Gtf=tf(num,den) Gss=ss(Gtf) Gzpk=zpk(Gtf)结果:Transfer function: -6.2 s - 0.7 ------------ 10 s + 1状态空间形式: a =x1 x1 -0.1 b =u1 x1 0.125 c =x1 y1 -0.064 d =u1 y1 -0.62Continuous-time model.Zero/pole/gain: -0.62 (s+0.1129) ---------------- (s+0.1)(3)由(2)知系统的传递函数为-6.2 s - 0.7 ------------ 10 s + 1系统的输入信号为单位阶跃函数,则其Laplace 变换为1/s ,这样系统的输出信号的Laplace 变换为Y(s)=-6.2 s - 0.7 ------------ 10 s^2 + s编写程序,将其表示为(R,P,Q )形式 clc;clear; s=tf('s')Gtf=(-6.2*s-0.7)/(10*s^2+s) [num,den]=tfdata(Gtf,'v') [R,P,Q]=residue(num,den) R =0.0800 -0.7000 P =-0.1000 0 Q = []于是得到:7.008.0)(1.0-=-t e t y 绘制曲线程序: clc;clear; t=0:0.1:100;y=0.08*exp(-0.1*t)-0.7; plot(t,y)2.已知系统的框图如下:其中:G1=1/(s+1),G2=s/(s^2+2),G3=1/s^2,G4=(4*s+2)/(s+1)^2,G5=(s^2+2)/(s^3+14)。
仪器系统建模与仿真考核试卷

15.关于建模与仿真,以下哪个说法是错误的?()
A.建模是对现实系统的抽象表示
B.仿真是对模型的实际运行
C.建模与仿真可以相互替代
D.建模与仿真相辅相成
16.以下哪个不属于系统仿真的应用领域?()
A.航空航天
B.交通运输
C.生物医学
D.日常生活
17.在以下哪种情况下,可以使用虚拟现实技术进行仿真?()
A.可以降低系统开发成本
B.可以提高系统设计效率
C.可以完全替代实际系统
D.可以进行危险环境的模拟
13.以下哪个不属于仿真模型的验证方法?()
A.对比实际数据
B.参数分析
C.灵敏度分析
D.回归分析
14.在以下哪种情况下,可以考虑使用多模型仿真?()
A.系统具有多个不确定因素
B.系统结构简单
C.系统参数完全已知
A.存在多个局部最优解
B.算法易于实现
C.对初值依赖性较小
D.系统具有非线性
17.在仿真结果分析中,以下哪些做法是合理的?()
A.对仿真数据进行统计分析
B.与实际数据对比
C.进行误差分析
D.忽略任何异常结果
18.以下哪些是连续事件仿真的特点?()
A.时间是连续的
B.状态变化是连续的
C.事件发生是离散的
D.系统建模可以提高系统分析效率
4.在以下仿真类型中,哪一种不属于按照时间特性分类?()
A.离散事件仿真
B.连续事件仿真
C.实时仿真
D.静态仿真
5.关于仿真模型,以下哪个说法是正确的?()
A.模型越复杂,仿真结果越准确
B.模型越简单,仿真运行越快
C.模型与实际系统越相似,仿真结果越可信
西工大2022年4月机考《系统建模与仿真》作业参考答案

西工大2022年4月机考《系统建模与仿真》作业参考答案试卷总分:100 得分:100本科目3次作答机会,每次试题内容相同,只是题目和选项顺序是随机调整的,大家可放心下载使用一、单选题(共20 道试题,共40 分)1.数学模型根据模型的状态变量可以分为()。
A.连续变化模型和离散变化模型B.连续时间模型和离散时间模型C.确定性模型和随机性模型D.同构模型和同态模型正确答案:A2.在仿真模型一样,所要仿真的时间长度也一样的情况下,采用()可获得最高的效率。
A.固定步长时间推进机制B.下次事件时间推进机制C.混合时间推进机制D.随机步长时间推进机制正确答案:B3.忽略具体事物的特殊性,着眼于整体和一般规律,这种研究方法是()。
A.抽象B.归纳C.演绎D.推导正确答案:A4.()是把过程调用和响应调用执行码结合在一起的过程A.汇编B.联编C.调试D.执行正确答案:B5.在系统与模型之间,如果在行为一级等价,则称之为()。
A.同构模型B.同态模型C.数学模型D.本构模型正确答案:B6.一种产品进入市场之后,一般会经过销售速度先不断增加然后又逐渐下降的过程,这称为产品的()。
A.生命周期B.保质期C.生产周期D.销售周期正确答案:A7.由于大多数微分方程是求不出其解析解的,因此研究其()和数值解法是十分重要的手段。
A.离散性B.连续性C.非稳定性D.稳定性正确答案:D8.根据事件调度法建立的仿真模型称为()仿真模型。
A.面向事件的B.面向对象的C.面向用户的D.面向系统的正确答案:A9.能够预定事件发生时间的策略方法是()。
A.事件调度法B.活动扫描法C.进程交互法D.结果预测法正确答案:A10.系统在有确定输入时,得到的输出却不确定,这种事物发展变化没有确定因果关系的模型是()。
A.连续变化模型B.离散变化模型C.随机性模型D.因果模型正确答案:C11.系统数学模型的建立需要按照模型论对输入、输出状态变量及其间的函数关系进行抽象,这种抽象理论称为()。
西北工业大学智慧树知到“电气工程及其自动化”《系统建模与仿真》网课测试题答案卷1
西北工业大学智慧树知到“电气工程及其自动化”《系统建模与仿真》网课测试题答案(图片大小可自由调整)第1卷一.综合考核(共10题)1.模型求解中最有力的工具是计算机模拟仿真。
()A.错误B.正确2.描述系统内与值的变化有关系的系统属性是()。
A.静态模型B.功能模型C.动态模型D.随机模型3.消费者总体按照他们在决定采用新产品之前所需的信息分成()几部分。
A.守旧者B.革新者C.追随者D.模仿者4.由于大多数微分方程是求不出其解析解的,因此研究其()和数值解法是十分重要的手段。
A.离散性B.连续性C.非稳定性D.稳定性5.()就是从特殊的具体认识推进到一般的抽象认识的一种思维方式。
A.推演B.总结C.假设D.归纳6.仿真模型是用来研究系统功能及其规律的工具,它常常是用数学公式、图、表等形式表示的行为数据的一组指令。
()A.错误B.正确7.仿真时钟每次推进一个固定时间步长的整数倍,这种仿真时钟推进机制是固定步长时间推进机制。
()A.错误B.正确8.智能仿真技术的开发途径是()。
A.理论计算B.人工智能C.仿真技术的集成化D.互联网9.以知识为核心,以人类思维行为作背景,引入整个建模与仿真过程,构造各处基本知识的仿真系统,这种仿真是智能仿真。
()A.错误B.正确10.数学模型根据模型的状态变量可以分为()。
A.连续变化模型和离散变化模型B.连续时间模型和离散时间模型C.确定性模型和随机性模型D.同构模型和同态模型第1卷参考答案一.综合考核1.参考答案:B2.参考答案:B3.参考答案:BD4.参考答案:D5.参考答案:D6.参考答案:A7.参考答案:A8.参考答案:BC9.参考答案:B10.参考答案:A。
系统建模与仿真课后作业
所以,蒙特卡罗方法的基本思想就是:当试验次数充分多时,某一事件出现的频率近似等于该事件发生的概率。
一般步骤:(1)构造或描述概率过程
(2)以已知概率分布进行抽样
(3)建立各种估计量
2.8、简述离散事件系统仿真的一般步骤。
(1)阐明问题与设定目标
(2)仿真建模
29
1023
511
0.998047
5
103
103
0.201172
30
2558
510
0.996094
6
518
6
0.011719
31
2553
505
0.986328
7
33
33
0.064453
32
2528
480
0.9375
8
168
168
0.328125
33
2403
355
0.693359
9
843
331
0.646484
34
1778
242
0.472656
10
1658
122
0.238281
35
1213
189
0.369141
11
613
101
0.197266
36
948
436
0.851563
12
508
508
0.992188
37
2183
135
0.263672
13
2543
495
0.966797
38
678
166
0.324219
系统建模与仿真课后作业
、系统、模型和仿真三者之间具有怎样的相互关系答:系统是研究的对象,模型是系统的抽象,仿真通过对模型的实验以达到研究系统的目的。
、通过因特网查阅有关蒲丰投针实验的文献资料,理解蒙特卡罗方法的基本思想及其应用的一般步骤。
答:蒲丰投针实验内容是这样的:在平面上画有一组间距为a的平行线,将一根长度为L(L<a)的针任意掷在这个平面上,求此针与平行线中任一条相交的概率。
”布丰本人证明了,这个概率是:p=2L/(πa) (π为圆周率)利用这个公式可以用概率的方法得到圆周率的近似值。
所以,蒙特卡罗方法的基本思想就是:当试验次数充分多时,某一事件出现的频率近似等于该事件发生的概率。
一般步骤:(1)构造或描述概率过程(2)以已知概率分布进行抽样(3)建立各种估计量、简述离散事件系统仿真的一般步骤。
(1)阐明问题与设定目标(2)仿真建模(3)数据采集(4)仿真模型的验证(5)仿真程序的编制与校核(6)仿真模型的运行(7)仿真输出结果的统计分析、以第二章图2-5所示的并行加工中心系统为对象,试分别画出相应的实体流图和活动循环图,并比较它们两者有何区别和练习。
(1)实体流图(2)活动循环图、以第二章中图2-5所示的并行加工中心系统为对象,建立Petri 网模型。
3214Petri 网模型的运行过程,并将分析结果同例3-5相比较。
、任取一整数作为种子值,采用第三题中得到的随机数发生器生成随机数序列的前200项数据,并对其统计性能进行检验。
解:由第3题可得到一个随机数发生器: a=5 b=9 c=3 m=512取种子值,生成的随机数序列前200项数据如下: nn1500000332326458458t 4t 3 P 1 t 1P 2P 6 P 3 P 5 t 2 P 4(2)t 3发生后 t 4t 3 P 1 t 1P 2P 6 P 3 P 5 t 2P 4(3)t 2发生后 (4)t 1不能发生t 4t 3 P 1t 1 P 2 P 6 P 3 P 5 t 2 P 4 (5)t 4发生后2161882272293245 3413413281228204 4206820291023511 5103103302558510 65186312553505 73333322528480 8168168332403355 9843331341778242 101658122351213189 1161310136948436 12508508372183135 13254349538678166 14247843039833321 15215310540160872 165281641363363 178383421818282 18418418431413389 19209345441948412 2022822845206315 211143119467878 225988647393393 23433433481968432 242168120492163115 25603915057866n n 5133333376828316 52166813277158347 5366315178238238 54758246791193169 55123320980848336 56104824811683147 5712312382738226 58618106831133109 59533218454836 6010810885183183 615433186918406 62158158872033497 63793281882488440 641408384892203155 65192338790778266 661938402911333309 67201347792154812682388340936363 69170316794318318 7083832695159357 7116339796288288 72488488971443419 73244339598209850 74197844299253253 7522131651001268244n n 1011223199126478478 1029984861272393345 10324333851281728192 1041928392129963451 10519634271302258210 106213890131105329 107453453132148148 1082268220133743231 1091103791341158134 110398398135673161 1111993457136808296 11222882401371483459 11312031791382298250 1148983861391253229 11519333971401148124 1161988452141623111 117226321514255846 118107854143233233 1192732731441168144 1201368344145723211 1211723187146105834 122938426147173173 123213385148868356 1244284281491783247 1252143951501238214n n 1511073491764848 152248248177243243 15312432191781218194 154109874179973461 1553733731802308260 1561868332181130327915716631271821398374 1586381261831873337 1596331211841688152 16060896185763251 1614834831861258234 16224183701871173149 1631853317188748236 1641588521891183159 165263263190798286 16613182941911433409 1671473449192204800 168224820019333 16910034911941818 17024584101959393 17120535196468468 17228281972343295 1731431431981478454 1747182061992273225 175103392001128104对上述数据进行参数检验如下:经计算可知,===因此可知统计量=()==()=假定显著性水平,则查表可知故可以认为:在显著性水平时,该随机数序列总体的均值和方差与均匀分布U(0,1)的均值和方差没有显著性的差异。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统建模与仿真习题一及答案1. 有源网络如图所示(1) 列些输出0u 与输入1u 之间的微分方程。
(2) Ω=101R 、Ω=52R 、Ω=23R 、Ω=34R 、F C 2=,在零初始条件下,将(1)中的微分方程表示为传递函数、状态空间形式、零极点增益形式。
(3)求(2)中方程在输入1u 为单位阶跃响应下的输出曲线。
解:(1) 由运算放大器的基本特点以及电压定理)4()3()(1)2()()1(2132021421320111R i R i u dt i i Cu R i i u R i u R i u c c -=+=+++==⎰(3)式代入(2)式得:42121320)()(1R i i dt i i C R i u ++++=⎰ (5)消去中间变量21,i i 有13142430114131230111120)(1u R R R R R R u u R R dt u R R R R u R u C u R R u ++++++=⎰ 两边求导整理后得(2)代入数据可以得到微分方程为:11007.02.610u u u u--=+ 程序如下:clc;clear;num=[-6.2 -0.7]; den=[10 1]; Gtf=tf(num,den) Gss=ss(Gtf) Gzpk=zpk(Gtf)结果:Transfer function: -6.2 s - 0.7 ------------ 10 s + 1状态空间形式: a =x1 x1 -0.1 b =u1 x1 0.125 c =x1 y1 -0.064 d =u1 y1 -0.62Continuous-time model.Zero/pole/gain: -0.62 (s+0.1129) ---------------- (s+0.1)(3)由(2)知系统的传递函数为-6.2 s - 0.7 ------------ 10 s + 1系统的输入信号为单位阶跃函数,则其Laplace 变换为1/s ,这样系统的输出信号的Laplace 变换为Y(s)=-6.2 s - 0.7 ------------ 10 s^2 + s编写程序,将其表示为(R,P,Q )形式 clc;clear; s=tf('s')Gtf=(-6.2*s-0.7)/(10*s^2+s) [num,den]=tfdata(Gtf,'v') [R,P,Q]=residue(num,den) R =0.0800 -0.7000 P =-0.1000 0 Q = []于是得到:7.008.0)(1.0-=-t e t y 绘制曲线程序: clc;clear; t=0:0.1:100;y=0.08*exp(-0.1*t)-0.7; plot(t,y)2.已知系统的框图如下:其中:G1=1/(s+1),G2=s/(s^2+2),G3=1/s^2,G4=(4*s+2)/(s+1)^2,G5=(s^2+2)/(s^3+14)。
(1)根据梅森公式求总系统传递函数(2)根据节点、支点、相加点移动方法求总系统传递函数 (3)根据feedback( )函数求总系统传递函数 解: (1)前向通道传递函数为1231G G G P =三个回路:1241G G G L -=,3502G L -=,12353G G G G L -= 两个不接触回路:12435012G G G G L =12)321(1L L L L +++-=∆11=∆12435012353501241123311G G G G G G G G G G G G G G G P G ++++=∆∆=s=tf('s');G1=1/(s+1);G2=s/(s^2+2);G3=1/s^2;G4=(4*s+2)/(s+1)^2;G5=(s^2+2)/(s^3+14);G=minreal(3*G3*G2*G1/(1+G4*G2*G1+50*G3+G5*G3*G2*G1+50*G3*G4*G2* G1))结果:Transfer function:3 s^6 + 6 s^5 + 3 s^4 + 42 s^3 + 84 s^2 + 42 s------------------------------------------------------------------------------------------------------------------------------------------ s^10 + 3 s^9 + 55 s^8 + 175 s^7 + 300 s^6 + 923 s^5 + 2456 s^4 + 3715 s^3 + 2132 s^2 + 2802 s + 1400(2)G构成反馈回路G,4G,21G构成反馈回路50,3clc;clear;s=tf('s');G1=1/(s+1);G2=s/(s^2+2);G3=1/s^2;G4=(4*s+2)/(s+1)^2;G5=(s^2+2)/(s^3+14);G124=G2*G1/(1+G2*G1*G4);G350=G3/(1+G3*50);G=minreal(3*G350*G124/(1+G350*G124*G5))结果:Transfer function:3 s^6 + 6 s^5 + 3 s^4 + 42 s^3 + 84 s^2 + 42 s------------------------------------------------------------------------------------------------------------------------------------------ s^10 + 3 s^9 + 55 s^8 + 175 s^7 + 300 s^6 + 923 s^5 + 2456 s^4 + 3715 s^3 + 2132 s^2 + 2802 s + 1400(3)clc;clear;s=tf('s');G1=1/(s+1);G2=s/(s^2+2);G4=(4*s+2)/(s+1)^2; G5=(s^2+2)/(s^3+14);G124=feedback(G2*G1,G4); G350=feedback(G3,50);G=minreal(3*feedback(G350*G124,G5))结果:Transfer function:3 s^6 + 6 s^5 + 3 s^4 + 42 s^3 + 84 s^2 + 42 s------------------------------------------------------------------------------------------------------------------------------------------ s^10 + 3 s^9 + 55 s^8 + 175 s^7 + 300 s^6 + 923 s^5 + 2456 s^4 + 3715 s^3 + 2132 s^2 + 2802 s + 14003. 已知系统的传递函数模型为:]52)1)[(2(24)(32233++++++=s s s s s s s G (1) 采用tf( )函数将该传递函数模型输入到MATLAB 环境。
(2) 采用zpk( )、tf2zp( )函数将上述传递函数模型转化为零极点增益模型。
(3) 采用ss( )、tf2ss( )函数将上述传递函数模型转化为状态空间模型。
(4) 采用tf( )、 ss2tf( )将(3)中变换后的状态空间模型回变为传递函数模型,并与(1)的结果进行比较。
(5) 采用Residue( ) 函数将上述传递函数模型转化为部分分式模型。
(6) 绘制系统的零极点图。
解: (1) clc; clear;num=[1 0 4 2];den1=conv([1 0 1],conv([1 0 1],[1 0 1]))+[0 0 0 0 0 2 5]; den=conv([1,0],conv([1,0],conv([1,0],conv([1,0 2],den1)))); G=tf(num,den) 结果:s^3 + 4 s + 2------------------------------------------------------------------- s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3 (2)clc; clear;num=[1 0 4 2];den1=conv([1 0 1],conv([1 0 1],[1 0 1]))+[0 0 0 0 0 2 5]; den=conv([1,0],conv([1,0],conv([1,0],conv([1,0 2],den1))));G=tf(num,den);sys=zpk(G)[z,p,k]=tf2zp(num,den)结果:(s+0.4735) (s^2 - 0.4735s + 4.224)------------------------------------------------------------------------------------------------------- s^3 (s^2 + 1.544s + 1.227) (s^2 - 1.762s + 1.755) (s^2 + 2) (s^2 + 0.2176s + 2.786)z =0.2367 + 2.0416i0.2367 - 2.0416i-0.4735p =0.8810 + 0.9896i0.8810 - 0.9896i-0.7722 + 0.7940i-0.7722 - 0.7940i-0.1088 + 1.6657i-0.1088 - 1.6657i-0.0000 + 1.4142i-0.0000 - 1.4142ik =1(3)clc; clear;num=[1 0 4 2];den1=conv([1 0 1],conv([1 0 1],[1 0 1]))+[0 0 0 0 0 2 5];den=conv([1,0],conv([1,0],conv([1,0],conv([1,0 2],den1))));G=tf(num,den);sys=ss(G)[A,B,C,D]=tf2ss(num,den)结果:a =x1 x2 x3 x4 x5 x6 x7 x8 x9 x10x1 0 -1.25 0 -1.125 -0.25 -0.75 -0.25 -0.75 0 0x2 4 0 0 0 0 0 00 0 0x3 0 2 0 0 0 0 0 0 0 0x4 0 0 1 0 0 0 0 0 0 0x5 0 0 0 1 0 0 0 0 0 0x6 0 0 0 0 2 0 0 0 0 0x7 0 0 0 0 0 1 0 0 0 0x8 0 0 0 0 0 0 1 0 0 0x9 0 0 0 0 0 0 0 1 0 0x10 0 0 0 0 0 0 0 0 2 0x11 0 0 0 0 0 0 0 0 0 0.5x11x1 0x2 0x3 0x4 0x5 0x6 0x7 0x8 0x9 0x10 0x11 0b =u1x1 0.5x2 0x3 0x4 0x5 0x6 0x7 0x8 0x9 0x10 0x11 0c =x1 x2 x3 x4 x5 x6 x7 x8 x9 x10 x11y1 0 0 0 0 0 0 0 0.125 00.25 0.25d =u1y1 0Continuous-time model.A =0 -5 0 -9 -2 -12 -4 -12 0 0 01 0 0 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 0 0 00 0 1 0 0 0 0 0 0 0 00 0 0 1 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 00 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 1 0B =1C =0 0 0 0 0 0 0 1 0 4 2D =(4)clc; clear;num=[1 0 4 2];den1=conv([1 0 1],conv([1 0 1],[1 0 1]))+[0 0 0 0 0 2 5];den=conv([1,0],conv([1,0],conv([1,0],conv([1,0 2],den1))));G=tf(num,den);sys=ss(G);[A,B,C,D]=tf2ss(num,den);sys=tf(sys)[num,den]=ss2tf(A,B,C,D)结果:Transfer function:s^3 - 1.11e-016 s^2 + 4 s + 2---------------------------------------------------------------------------------------------------------------------------s^11 + 4.816e-015 s^10 + 5 s^9 + 2.386e-014 s^8 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3num =Columns 1 through 90 0.0000 0 0.0000 -0.0000 0.0000 0.0000 -0.0000 1.0000Columns 10 through 120.0000 4.0000 2.0000den =Columns 1 through 91.0000 -0.0000 5.0000 0.0000 9.00002.0000 12.0000 4.0000 12.0000Columns 10 through 120 0 0(5)clc; clear;num=[1 0 4 2];den1=conv([1 0 1],conv([1 0 1],[1 0 1]))+[0 0 0 0 0 2 5];den=conv([1,0],conv([1,0],conv([1,0],conv([1,0 2],den1))));[R,P,Q]=residue(num,den)结果:R =-0.0246 + 0.0089i-0.0246 - 0.0089i0.0833 + 0.0295i0.0833 - 0.0295i0.0274 + 0.0298i0.0274 - 0.0298i0.0435 + 0.0581i0.0435 - 0.0581i-0.25930.27780.1667P =-0.1088 + 1.6657i-0.1088 - 1.6657i-0.0000 + 1.4142i-0.0000 - 1.4142i0.8810 + 0.9896i0.8810 - 0.9896i-0.7722 + 0.7940i-0.7722 - 0.7940iQ =[](6)clc; clear;num=[1 0 4 2];den1=conv([1 0 1],conv([1 0 1],[1 0 1]))+[0 0 0 0 0 2 5];den=conv([1,0],conv([1,0],conv([1,0],conv([1,0 2],den1))));G=tf(num,den);pzmap(G)结果:4. 考虑二阶系统:121)(2++=s s s G 系统的输入为)2sin(t 。