动平衡资料
动平衡均匀性资料

轮胎的1次成分是指轮胎在一次转动中的一次波峰波谷。
2次成分是指轮胎在一次转动中的2次波峰波谷。
8次成分是指轮胎在一次转动中的8次波峰波谷。
1秒中转15次,轮胎的1次成分产生15Hz的波动。
2次成分产生30Hz的波动。
8次成分产生120Hz的波动。
次数成分如果小的话没有问题,但是大的话这个波动的力量就会变 大造成车子振动、甚至人能感觉到。1次或2次的低次成分的话, 只是造成车子振动发展为振动问题;但是如果时8次等高次成分的 话,人能感觉到声音,进而发展为噪音、杂音等。一次限制、二次 限制就是这个原因。
表面
距离
静平衡
轮胎一周上的重心
背面
偶平衡
想象一下把轮胎竖起来以中心挂着的状态。 轮胎重的地方如果表面和背面不一样的话轮胎会倒下。 我们可以将这种使轮胎倒下的力的朝向和大小称之为偶平衡。 因为跟静平衡一样具有方向性和大小,因此用矢量表示很方便。 偶平衡在轮胎正面(U侧)和背面(M侧)力的大小虽然相同但朝向正好相反。
RFV的改善就只有接头定位而已?No!
每一个部件的要因、成型机的要因等 细节部分都很重要!
部件的要因
轮胎一周的厚度偏差 接头量 贴附精度
成型机的要因
cord pass 偏心
Cord pass与RFV的关系
Cord pass
Cord pass指的是轮胎横切面、一侧胎 圈的顶角到另一侧胎圈顶角处的帘线 长。 它在成型的胎圈设定工程处决定。 Cord pass长的地方,轮胎膨胀较大、 RFV波形里显示为波峰,短的地方轮 胎膨胀较小在波形里显示为波谷。
轻点
最重的地方 会下降
不管是胎面,胎侧,内衬层还是其他材料,在接头重叠的地方或者接头 拉伸的对面会变重。 这就是静平衡的原本面貌,也是其原因所在。 静平衡的改善只要与其相对进行改善就可以了。 接头量小,不拉升,不重叠地贴付材料。
MPM动平衡中文资料

2.01
MPM balancing systems have a modular structure. The best equipment for each machines and customer requirement can be arranged MPM 平衡系统可按客户的要求进行组合,为不同的机床提供不同的平衡解决方案。
or via the PCU of the machine. • 可以通过单独的操作模块或者机床的 PCU 系统操作动平衡系统 • It is possible to connect automatic external balancers, internal balancers or ring
balancers with measuring electronics. • 系统可以和外置平衡头、内置平衡头以及环状平衡头的连接 。
General 总括
Examples : 需要平衡的情况 :
• When using a new grinding wheel • 使用一个新砂轮时 • If there is a play in the tool holding system • 刀具(砂轮)夹持系统做过调整 • After each change of wheel • 每次更换砂轮后 • After the dressing • 砂轮修正以后 • After form-turning 成型车磨后 • After first use of coolants • 第一次冷却后
Balancing –2-channel(7-way) 5 双通道动平衡(7 线)
Balancing—2channel+GAP/Crash/Dress 6 function (2-channel) (7-way) 双通道动平衡和间隙、防碰撞、 修正功能(7 线)
动平衡报告

动平衡报告动平衡报告1.动平衡测试基础1.1关于动平衡的“精度”目前国内基本上都采用“最小检测量”这一指标来表征动平衡机的“精度”即0e 。
按部颁标准定义“最小检测量”的定义是:“对某一重量的校验转子,实验样机能够检测的最小偏心距,以0e 表示,单位:微米(m μ)”。
(通常平衡行业将0e 称为平衡精度,单位也有用“kg mm g /?”表示的,换算方法即:kg mm g /11?=μ)。
不平衡量计算公式m r m e /'=式中e ——平衡精度(kg mm g /?);m ’——剩余不平衡量;r ——矫正半径(mm );m ——工件质量(kg )。
在选用动平衡机时,首先必须明确所需校验的转子的许用不平衡量e (m μ)多少。
也就是说,所用的动平衡机最小检测量即0e 必须小于转子的许用不平衡量0e <e< p="">否则所选用的动平衡机的检测能力无法保证工件校验动平衡的要求。
转子的许用不平衡量e 是设计者规定的。
如果有些工件在图样上未标明许用不平衡量的要求,选用动平衡机时,可参照国际标准ISO-1940推荐值确定。
1.2平衡工艺的设计原则在工艺图样上应该标明,转子应在什么情况下平衡(例如在套上滚珠轴承时)。
如果不能随意选择的话,那么校正半径和支撑面应该标会并注明尺寸,校正半径也应如此。
此外,有关校正方式、所采用的工具、校正存在的限制(例如最大许用孔深)以及每平面上的许用剩余不平衡均要扼要说明。
下列要素应当在规定有平衡公差要求的图样、技术规格卡或其他文件上加以说明:1)每个校正平面上最大允许的剩余不平衡量;2)校正平面的位置;3)考虑所需要的转子强度和其他条件,说明在校正位置处能够可靠加或去除的最大质量及方法;4)轴承的类型和他们在平衡机上的位置;5)驱动方案;6)平衡转速;1.3典型刚性转子的平衡精度等级平衡试验能改善旋转体质量分布,使转子在轴承旋转时没有不平衡离心力,当然这目的仅能达到一定的程度,经平衡后,转子将还会有剩余不平衡量,只不过是达到允许的范围罢了。
动平衡基础知识
动平衡基础知识
嘿,朋友!咱今天来聊聊动平衡这档子事儿。
您知道不,就像咱走路得两条腿一样稳当,机器运转也得讲究个平衡。
动平衡啊,简单说,就是让转动的部件在工作的时候不晃悠、不闹腾,稳稳当当干活儿。
比如说,汽车轮子要是动平衡没做好,那开起来可就像醉汉走路,颠得慌,还费轮胎呢!您想想,要是您坐车上,一路“蹦迪”,这得多难受呀!
再好比那飞机的螺旋桨,要是不平衡,那飞起来还不得像个没头的苍蝇,乱晃悠?这多危险呐!
动平衡的关键,就在于找到不平衡的地方和多少。
这就像给病人看病,得先找出病根儿来。
一般呢,是通过专门的仪器来检测,这仪器就像医生的听诊器,能把机器的“毛病”听出来。
检测出来不平衡的量之后,就得想办法解决。
这就跟咱减肥似的,多的地方得减掉,少的地方得补上。
有时候是在部件上加点配重,有时候得调整一下结构。
您可能会问啦,那怎么知道加多少配重,加在哪儿呢?这可就得靠技术和经验啦。
就像大厨做菜,盐放多少,火候怎么掌握,那都是功夫。
而且啊,不同的机器,动平衡的要求还不一样。
精密的仪器,那要
求就跟处女座似的,一点偏差都不行;而一些粗重的设备,可能要求
就没那么严苛,但也不能太离谱呀!
您说,要是一个大工厂里的机器都动平衡不好,那声音不得跟交响
乐似的,乱哄哄,工人师傅能受得了?生产出来的东西能靠谱?
所以说呀,动平衡可不是小事儿,它关系到机器的寿命、工作效率,甚至咱们的安全。
咱可得重视起来,不能马虎!
总之,动平衡这事儿,看似复杂,其实搞明白了也不难。
只要用心,就能让机器乖乖听话,稳稳当当干活儿!。
动平衡
检查胎压、清除泥土、石子与旧平衡块
选择锥体,装上车轮并上紧 打开平衡机电源开关 测量参数a、b、d并输入 启动仪器,读取不平衡量和不平衡位置 加装动平衡块调整动平横
平衡块系夹紧
检查输入尺寸 起动时,助推 车轮 检查锁紧螺母是 否拧紧
重新进行平衡试验,至指示装置显示“00”
测试结束,关闭电源 取下轮胎,整理工具
卸下轮胎时不 要撞击主轴
5.车轮动平衡检测与调整
三个重要参数测量:
a-轮辋边缘至机箱距离 b-轮辋宽度 C-轮辋直径
a
b
d
第三个参数就是轮辋的直径
6.课后练习
1.分组练习车轮动平衡检测与 调整 2.撰写实习报告
检测、调整车轮动平衡的基本流程 检测调整车轮动平衡的注意事项及动作要领
(2)加剧轮胎及有关机件的磨损,缩短汽车 的使用寿命
3.以下情况需考虑做车轮动平衡
某 速 度 范 围 内
1.方向盘振动
2.车轮摆振、有节奏的异响 3.更换轮胎或者修补轮胎之后
4.动平衡检测调整原理
(1)动平衡受力分析
离心力F的大小为: F=mv² /r
如果质量分布对车轮中心面 不对称,在车轮旋转轴线径向 相反位置上,有作用半径相同 的不平衡点m1和m2,转动中 产生力偶距M,使车轮动不平衡。
什么是车 轮动平衡?
车轮动平衡 有什么作用? 如何检测 与调整? 何时需做车 轮动平衡?
1.什么是车轮动平衡?
为消除车辆在行驶中车 轮抖动、摆动现象,通 过增加配重的方法,使 车轮在动态情况下平衡。
2.车轮动平衡的危害
(1)引起车轮上下跳动和摆振
影响操稳性
影响安全性
影响舒适性
2.车轮动平衡的危害
汽车车轮动平衡资料重点
动平衡是什么
汽车的车轮是由轮胎、轮毂组成的一个整 体。但由于制造上的原因,使这个整体各 部分的质量分布不可能非常均匀。当汽车 车轮高速旋转起来后,就会形成动不平衡 状态,造成车辆在行驶中车轮抖动、方向 盘震动的现象。为了避免这种现象或是消 除已经发生的这种现象,就要使车轮在动 态情况下通过增加配重的方法,使车轮校 正各边缘部分的平衡。这个校正的过程就 是人们常说的动平衡
1 检查
电源:提供动平衡仪的动力 助力源:在固定轮胎的过程中起到辅助的
作用(上升时注意轮胎的位置,下降过程 中注意安全)
2 轮胎的拆卸固定
固定轮胎到动平衡轴,选用合适的固定器 固定(必须紧固,并且固定器的大小合适)
3 轮胎的检查铅块及镶嵌在轮胎 花纹的杂物
固定完毕检查轮胎及轮辋,用专用钳摘掉 轮辋上的铅块,及轮胎花纹中的石子或其 他杂物
4 数据的测量及输入
把动平衡仪上的尺子拉出来,测量,然后输入第一个 控制器
测试轮辋宽度
输入轮辋直径
5 启动动平衡仪
注意远离轮胎位置
6 固定合适的铅块
选用的标准:轮辋的材质铝合金或者铁
规格合适
专用钳固定禁止用普通锤子固定
位置的选择:面板上全部指示灯亮起的位 置
7 重新测量调试
重新启动动平衡仪,直到左右均显示0为准
8 卸下轮胎,关闭电源,助力 源
松开固定器,卸下轮胎,并关闭电源,切 断压缩气体管路。
动平衡的设备
轮胎动平衡仪一台、多规格轮胎固定器、 弯尺(测量轮辋宽度)、专用钳。
各规格配重铅块
什么时候做动平衡
1 更换轮胎 2 车辆行驶过程中出现车辆发抖或方向 盘的震动。
3 行驶到一定里程,车辆需要保养时。
动平衡培训材料
Balancing
这是个有关平衡的例子
当我们加速时会产生什么 样的效果呢?
不平衡看来变得 更糟。
Balancing
不平衡和速度关系对照表
14.00 12.00 10.00
"e" micron
质量等级 G 6.3
平衡公差随速度改变而变化
8.00 6.00 4.00 2.00 0.00 5000.00
R2,q2
2
Balancing
修正率
U
正常修正 数量 <10% of U
带角度误差的修正
20% 误差结果
Balancing
不平衡的向量 不平衡(超重) 修正(去重) a
残余不平衡量
如果修正的数量是正确的而 仅仅是角度误差,残余量等 于U sin a
Balancing
A n g le e r r o r
Balancing
转子平衡的理论,技术 和工艺
Balancing
为什么要平衡转子?
怎样平衡转子?
什么是公差?
不平衡的后果是什么?
Balancing
准备,
开始!
Balancing
产生振动 产生振动 产生噪音
不平衡会导致
Balancing
不平衡
不平衡的根源是什么? 振动或噪音来自哪里?
Balancing
Balancing
第三讲
Balancing
0°
?
90°
270°
180°
Balancing
平衡修正的相位误差 从1到2的修正 相位误差= a
a
1
R1,q1
a
角度改变量大于角度误差
R2,q2
动平衡原理及案例-2022年学习资料
动平衡衡操作过程中要-注意什么?-。确认是否动平衡问题:-看频谱和相位-正相位角-0相位的计量方向:-旋转 向-反光片-迎着旋转方向看-14
怎样选择动平衡测量参数?-口中低速机器,用位移或速度测量-口高速机器,-用速度或加速度测量-15
怎样判断试重是否可用?-加试重前后的-幅值差≤25%-幅值差>25%-相位差<25度-增大/移动试重-相位 >25度-测量值可用-•试重与最后的修正重量必须具有同一半径-•转速必须稳定-16
2002-12-25振动测试数据(测点:-轴承1-加速度-位移-高频加速度-峰值ms2-有效值mm/s峰峰 um-有效值ms2-第一次22.1-14.8-408-3.2-第二次-22.7-15.47-398-2.7 -报警线10-11.2-160-2.0
振动评价标准-IS02372振动质量评级标准-振动烈度-判断每种机器质量的实例-mm/s-小型机器-中型机 -大型机器-透平机器-45-28-不合格D》-目前值-18-15-11.2-合格C-7.1-4.5-良好B 属不合-2.8-格设备-1.8-1.12-0.71-0.45-优秀A-0.28-15KW-15-75KW75KW-参考GB6075-85以及VDI2056,适用于转速在600-12000转/分的各种器
a-a>b-△-不-什么情况要做双面动平衡?-。当转子的长度(不含轴)大于半径时,可能-要进行双面平衡才能 到满意的效果。-12
平面1-平面2-测点1-测点2-相位测量-。双面动平衡时,需选两个加重平面及两个测振点。-在其中一个面加试 时,需同时对两个测点的振动进-行测量,即要考虑所谓交叉效应。其步骤大致如下:-a、-测量两个测点的初始振动 b、第1面加试重,测量两个测点的振动-c、第2面加试重,测量两个测点的振动-d、仪器自动计算出影响系数、两 面上的应加重量和位置
动平衡

回转构件上各点的质量mi近似分布在一个平面上。
绕定轴转动时各点的惯性力mi riω2为一平面力系。
回转构件:绕定轴匀速ω转动刚性转子的平衡一、静平衡(径宽比(D/b )>= 5)二、动平衡(径宽比(D/b ) < 5 )回转构件上各点的质量mi分布不在一个平面上。
绕定轴转动时各点的惯性力mi r iω2为一平行空间力系。
静平衡(单面平衡)条件:合力为零m1r1ω2+m2r2ω2+m3r3ω2+mbrbω2=0消去公因子ω2后得m1r1+m2r2+m3r3+mbrb=0其中:mi ri为质径积。
静平衡即质径积平衡1F 2F 3F b F 'b F ''T 'T ''1231m 2m 3m b r '1r 2r3r b r ''1m '2m '3m '1m ''2m ''3m ''l1l '2l '3l '1l ''2l ''3l ''11r m '22r m '33r m 'b b r m ''11r m ''22r m ''33r m ''b br m ''''动平衡(双面平衡)条件:当转子转动时,转子上分布在同平面内的各个质量所产生的空间离心惯性力系的合力及合力矩均为零。
动平衡测量时要求转子必须能在支承系统上被驱动而旋转, 支承系统需必要的自由度, 以保证支承系统在转子不平衡离心力的作用下产生与转子不平衡量成正比的有规律振动。
这样, 转子-支承系统就组成了一定形式的质量-弹簧系统, 进而通过测量支承的振动而获得转子的校正平面上不平衡量大小和相位。
这就是动平衡测量的基本原理。
动平衡

2 平衡实验
§10.2 刚性转子的平衡
回转构件: 绕定轴匀速 转动 一、静平衡 (径宽比(D/b )>= 5) 回转构件上各点的质量mi 近似分布在 一个平面上 绕定轴转动时 各点的惯性力 mi ri 2 为一平面力系
二、动平衡 (径宽比(D/b ) < 5 ) 回转构件上各点的质量mi 分布不 在一个平面上 绕定轴转动时 各点的惯性力 mi ri 2 为一平行空间力系
凡满足前两个代换条件的代换,其惯性力不变,代换 前后静力效应完全相同,故称为静代换
凡满足上述所有三个代换条件的代换,其惯性力和 惯性力偶不变,代换前后动力效应完全相同,故称 为动代换
曲柄滑块机构的惯性力平衡 如何实现各构件的惯性力的合力为零 或总质心固定不动!
滑块 及其它构件 均作周期性的运 动。 惯性力平衡困难!
第十章 机械的平衡
§ 10.1 概述 §10.2 刚性转子的平衡 §10.3 机器在基座上的平衡
一、本章主要内容
1、刚性转子静平衡原理与计算 2、刚性转子静平衡实验方法 3、刚性转子动平衡原理与计算 4、动平衡实验方法 5、平面机构的平衡原理与方法
二、本章重点
刚性转子动平衡原理与方法
三、本章难点
1、空间力系的平衡问题——转化为两面上的汇交力系 的平衡问题 2、平面机构的惯性力和惯性力矩不能在构件内部平衡 只能在机架上对整个机构进行平衡。
实际机构 体积大,
总重量大,安装不便 希望:
惯性力不大,体积不大, 总重量不大
策略:损失平衡效果,换取体积、总重量的降低 在某些构件上加配重, 使滑块惯性力大部分平衡 如何实施? (1)连杆质量向连架杆上分解 (2) 曲柄上加配重m1E,
平衡曲柄上惯性力 平衡滑块上部分惯性力 对连杆2的质量m2在B、C处代换: m2B = m2LC2/LBC m2C=m2(L2-LC2)/LBC
动平衡检测资料
m1r1+ m1′r1′=m2r2+ m2′r2′ m1r1 L = m1′r1′ L ′ 。 则圆柱转子处于动平衡中,如图2(b)所示。配置平衡块所在的垂直于
转子轴线的两个平面,称为校正平面。
F1=m1r1
向相反位置上,各有一作用不平衡点m1和m2,满足静平衡条件m1r1ω2 =m2r2ω2,但由于m1和m2处于不同一平面内,产生的离心力F1=m1r1ω2和 F2=m2r2ω2形成力矩M=F1L,这时,转子处于动不平衡状态。
如果圆柱转子的两端面上配置质量块m1′和m2′,当转子匀速旋转时,产 生的离心力F1′和F2′,满足条件
3.轮胎质量分布不均、尺寸或形状误差太大、使用中变形或磨损不均、 使用翻新胎或补胎。
4.并装双胎的充气嘴未相隔180°安装,单胎的充气嘴未与不平衡点标记 (经过平衡试验的新轮胎,往往在胎侧标有红、黄、白或浅蓝色的□ 、△、○、或◇符号,用来表示不平衡点位置)相隔180°安装。
5.轮毂、制动鼓(盘)、轮胎螺栓、轮辋、内胎、衬带、轮胎等拆卸后重 新组装成车轮时,累计的不平衡质量或形位偏差太大,破坏了原来的 平衡。
m1
F1
F1'
m1
m1'
m2
l
F2=m2r2
(a)
l'
m2'
m2
l
F2'
F2
(b)
(a)转子静平衡但动不平衡 (b)转子动平衡 图2车轮动平衡示意图
三.车轮不平衡的危害
如图3 车轮不平衡
1.车轮不平衡质量m在高速下形成的不平衡力F可分解为水平分力Fx和垂
轮胎车轮动平衡PPT资料(正式版)
得到平衡。 当转速上升到设定值时显示灯即被点亮,计算机即将第一次所测得的变量自动处理成常量显示于仪表板上;
硬式车轮平衡机
凡是可测定车轮左右两侧的不平衡量及
离车式车轮平衡机
车轮的不平衡质量产生的不平衡力即被力传感器感
知并转变成电量,这一电信号由电缆传入驱动小车
内的电测系统予以计量和处理。光电传感器1拾取车 轮的初相位信号和转速信号,经电测电路处理后得
2、动不平衡
利用车轮在平衡机的转轴上高速旋转时 产生的离心力在支承装置上产生动反力,测 出支承装置锁受的动反力即可测得不平衡量。 检测原理如下图:
就车式平衡机 轮胎尺寸或形状误差太大、使用中变形或磨损不匀。
就车式车轮平衡机结构示意图
3)按平衡机转轴的支承方式 动平衡原理(方法):预先选定两个平面,根据力系等效原理,分别向两平面分解,然后在两平面内作平衡,则惯性力和惯性力矩都
得到平衡。 为了适应不同计量制式,平衡机上的所有标尺一般都同时标有英制和公制刻度。
m
' 2
O
M
m2
m
' 1
m2
2、动不平衡
动平衡的条件是: 即:分布在回转件上各个质量的离心惯性
力合力为零;同时离心力所引起的力偶的合力 偶矩也为零。
动平衡原理(方法):预先选定两个平面,根据
力系等效原理,分别向两平面分解,然后在两平面内 作平衡,则惯性力和惯性力矩都得到平衡。两平面称 为平衡面。
NR
d
NL
c
m1 aF1
m2
b F2
结论:
动平衡基本知识和操作经验
转子动平衡及操作技术一. 转子动平衡..(一) .有关基本概念1. 转子:机器中绕轴线旋转的零部件,称为机器的转子.2. 平衡转子:旋转与不旋转时对轴承只有静压力的转子.3. 不平衡转子:如果转子在旋转时对轴承除有静压力外,附加有动压力,则称之为不平衡的转子。
不平衡转子的危害性:转子如果是不平衡的,附加动压力将通过轴承传达到机器上,引起整个机器的振动产生噪音,加速轴承的磨损,降低机器的寿命,甚至使机器控制失灵,发生严重事故.(二) 转子不平衡的几种形式1. 静不平衡:主矢不为零,主矩为零: R0═Mrcω2≠0rc≠0,M0═0JYZ═JZX═0R0通过质心C,转轴Z与中心主惯性轴平行。
(图1)2. 准静不平衡:主矢和主矩均不为零,但相互垂直R0═Mrcω2≠0,M0═0JYZ═JZX═0, R0不通过质心C,转轴Z与中心主惯性轴相交于某一点。
(图2)3. 偶不平衡:主矢为零,主矩不为零R0═0rc═0M0≠0JXZ≠0JYZ≠0(图3)4. 动不平衡:主矢和主矩均不为零且既不相交,又不平行.R0═Mrcω2≠0rc≠0M0≠0JXZ≠0JYZ≠0(图4)5.选择静平衡或动平衡的一般原则当转子外径D与长度L满足D/L≧5时,不论其工作转速高低都只需进行静平衡(如果L/l>2时)当D≤I时,n>1000r/min必须进行动平衡.(特殊要求除外)(三) 动平衡机的工作原理把刚性回转体安装在动平衡机的弹性支承上,使回转体转动.根椐支承的不同情况,(通过回转体的周期性机械振动信号变为电感信号)测量出支承的振动和支反力.用分离解算电路,计算出回转体的不平衡量,再对回转体进行加重或去重,直至平衡量达到要求.1. 软支承动平衡机的分离解算原理刚性回转体动平衡时,任一校正面的不平衡量都会使左,右二支承同时产生振动, α设校正面I上的不平衡量m1r1在左,右支承处引起的振幅分别用αL1mr1和αR1mr1表示;校正面Ⅱ上的不平衡量m2r2在左,右支承处引起的振幅分别用αL2mr2和αR2mr2表示.其中为一组与回转体重量,支承位置,校正面位置及回转体惯性矩等有关的动力影响系数,在实际操作中,可由试验确定.则左,右支承的振幅Vl,VR与不平衡量m1r1,m2r2的关系为:VL═αL1m1r1+αL2m2r2VR=αR1m1r1+αR2m2r2以下两式可联立解出得: m1r1=αR2 VL/?-αL2 VR/?m2r2=αL1VR/?-αR1 VL/?式中:△=αL1 αR2-αL2αR1由算式可知:只要知道四个影响系数,就可以从测得的支承振幅VL和VR算出不平衡量m1r1和m2r2,在动平衡机实际操作中,无需算出四个动力影响系数,只需通过调整电位器W1,W2,W3,W4即可求出m1r1和m2r2(见DRZ—1A)动平衡机操作显示屏示意图.(图5)2. 硬支承动平衡机的分离解算原理在硬支承动平衡机中,不平衡产生的离心力与支承振幅成正比,而且相位相同,因此,对于硬支承动平衡机是通过测量支承反力来确定二校正面上的不平衡量,若二校正面上的不平衡量产生的离心力为FL和FR,则左,右两支承的反力NL和NR,则左,右两支承的反力NL和NR.可由静力学的方法求出.硬支承平衡机的支承关系式如下:FL=fL+1/B(AfL-CfR) FR=fR-1/B(AfL-CfR)(图6)(1) FL=fL+1/B(AfL+CfR) FR=fR-1/B(AfL+CfR)(图7)(2) FL=fL-1/B(AfL+CfR) FR=fR+1/B(AfL+CfR) (图8),(图9)(3) FL=fL+1/B(AfL-CfR) FR=fR+1/B(AfL-CfR)(图10)图中的A,B,C为支承和校正面的位置尺寸.离心力FL和FR仅与支承反力NL和NR及尺寸A,B,C有关.不同的支承形式只改变支反力的运算符号,用传感器测出支反力NL,使用如软支承平衡机类似的分离解算电路,求出离心力FL和FR,再根椐回转体的工作角度ωω 算出左,右校正面上的不平衡量FL/ω和FR/ω(1)~(4)为通常将不平衡量分解到两个校正面上进行平衡校正的方法,而对于直径比(L/D)较小的园盘形回转体,进行两面高精度平衡或检查其单面平衡后的精度,或对装配式回转体(如带叶片轴)进行边装配边平衡则可用静/偶平衡法.3.软支承动平衡机与硬支承动平衡机的比较:(四) 动平衡精度1. 动平衡的定义:不平衡的转子经过测量其不平衡量和不平衡相位,并加以校正以消除其不平衡量,使转子在旋转时,不致产生不平衡离心力的平衡工艺叫做动平衡.2. 转子的平衡精度等级(1) 通过实验(工作状态下),积累资料,对未做规定的某些特殊要求的转子订出可行的平衡精度规范(2)根据eω=G(递减的常数)分级。
动平衡的标准

动平衡的标准动平衡是指在机械系统中,各部件的质量和速度分布使得系统整体保持平衡状态。
在工程实践中,动平衡是非常重要的,它能够有效地减少机械系统的振动和噪音,提高系统的稳定性和工作效率。
为了达到良好的动平衡效果,需要按照一定的标准进行设计和检测。
本文将从动平衡的标准入手,介绍动平衡的相关知识和要点。
首先,动平衡的标准主要包括两个方面,一是质量的平衡,二是速度的平衡。
质量的平衡要求各部件的质量分布均匀,不会产生偏心力;速度的平衡则要求各部件的线速度和角速度在运转时保持平衡,不会产生震动和共振。
因此,动平衡的标准是基于质量和速度平衡的要求而制定的。
在进行动平衡设计时,需要根据实际情况和要求确定相应的标准。
一般来说,动平衡的标准包括以下几个方面:1. 精度要求,动平衡的精度要求取决于机械系统的工作条件和要求。
一般来说,对于高速旋转的部件,如飞机发动机的涡轮叶片,要求的动平衡精度更高;而对于低速旋转的部件,如汽车轮胎,要求的动平衡精度相对较低。
2. 平衡质量的限制,动平衡的标准还包括对平衡质量的限制。
根据质量平衡的要求,各部件的质量分布应符合一定的比例和范围,以保证系统的平衡性。
对于不同类型的机械系统,其平衡质量的限制也会有所不同。
3. 平衡速度的要求,动平衡的标准还包括对平衡速度的要求。
在设计和检测过程中,需要根据系统的工作条件和要求确定各部件的线速度和角速度的平衡范围,以保证系统的稳定性和安全性。
4. 检测方法和设备,动平衡的标准还包括对检测方法和设备的要求。
在进行动平衡设计和检测时,需要选择合适的检测方法和设备,以保证检测结果的准确性和可靠性。
总之,动平衡的标准是保证机械系统正常运转和工作效率的重要依据。
在实际工程中,需要根据具体情况和要求确定相应的标准,并采取相应的措施和方法进行设计和检测。
只有严格按照标准要求进行动平衡设计和检测,才能确保机械系统达到良好的动平衡效果,提高系统的稳定性和工作效率。
动平衡
1.胎面全长的不稳定 接合处的时大时小 2.胎面才断面的摸样 3.胎面圆周方向厚度的不均一 4.带束的宽度不稳定和断差的存在 5.胎体帘布、带束附胶厚度不均一
• 成型
1.半制品接头量过大 2.冠带、带束的接合点分散 3.成型机的纵振动减小
• 硫化
1.磨具的偏心 2.胶囊的偏心 3.机械手的偏心
• 动平衡(D/B)
轮胎和轮辋组装并注入标准的空气压后,以回转轴为 基准进行回转时由于存在着质量分布不均一现象而发生的 上下、左右震动现象。
动平衡、静平衡与偶平衡之间的关系
静平衡
共存
动平衡 偶平衡
静平衡
Static Balance
“Static = 10g”
“Static = 0g”
静平衡产生原因
• 硫化
1.磨具的上下断差(错位) 2.胶囊的上下偏心 3.局部性的胎圈部位橡胶溢出
动平衡产生的原因
由于D/B是S/B和C/B力的合成,故D/B 的产生原因是S/B和C/B产生原因的合成
动平衡
什么是平衡?
平衡实际是指不平衡
1.不平衡是如何产生的? 回转体的质量分布不均匀(即偏心)。 质量分布偏离质心状态的回转运动产生离心力,是引起 振动、发生噪音等的原因之一。
2.不平衡产生的位置 确切地很难说清楚明确的位置。但是可以简单地设定一 个测定基准面。 以轮胎为例,通常把胎圈面作为基准面。
动平衡检测的目的
• 防止轮胎异常磨损 • 提高汽车行驶时的稳定性,安全
平衡的分类
BALANCE
静平衡
动平衡
偶平衡
定义
• 静平衡(S/B)
静止状态下,以回转轴为中心轮胎质量分布不均一 的现象。
• 偶平衡(C/B)
动平衡名称解释

动平衡名称解释动平衡是一种机械设计原则,它是指在机械系统中的动态平衡状态,在这个状态中,任何不平衡力和力矩都被有效地抵消,以便整个系统可以尽可能地稳定运转。
动平衡在各种机械系统中都非常重要,尤其是高速旋转的设备,因为未经调整的高速旋转的设备可能产生振动和噪声,从而缩短使用寿命。
下面是对动平衡名称的解释:1. 静平衡静平衡是指旋转物体在旋转时没有产生外部力矩,它完全处于平衡状态。
这种平衡状态适用于瞬时平衡的情况,如在对称的物体上进行的平衡计算。
在这种情况下,运用“等效重力线”理论,纵向向心力与重力作用线重合,采用重力作用中心和转轴构成的线作为平衡参考线,达到静平衡状态。
2. 动平衡动平衡是指旋转物体在旋转时没有产生振动,它在力学上处于动态平衡状态。
这种平衡状态适用于非对称的物体,在它们的反复旋转中产生微小的不对称力矩。
在动平衡过程中,通过给物质添加或移除质量来调整平衡,以便将不平衡力矩最小化。
3. 平衡量平衡量是指某一物体在平衡状态下需要调整的重量或质量。
通过对平衡量的测定,可以确定需要添加或移除多少质量才能使动平衡得到调整。
这个过程需要测量物体的重心和转轴之间的距离以及物体的不平衡力矩和转速等参数,以便计算出需要平衡的量。
4. 平衡机平衡机是一种用于测试和调整物体平衡的机器设备。
平衡机通常包括一个水平或垂直支架,以便将旋转物体安装到其中。
机器设备还包括一个转速测量装置,以便测量旋转物体的转速,并确定物体的平衡量。
通过在平衡机中调整物体的平衡量,可以保证物体在高速旋转时处于稳定的状态。
综上所述,动平衡是机械设计必不可少的原则之一。
通过正确的调整和平衡,可以最大限度地提高机械系统的稳定性和寿命。
有关动平衡名词的理解和运用,有助于我们在日常生活和工作中更好地理解和使用机械设备。
动平衡技术资料
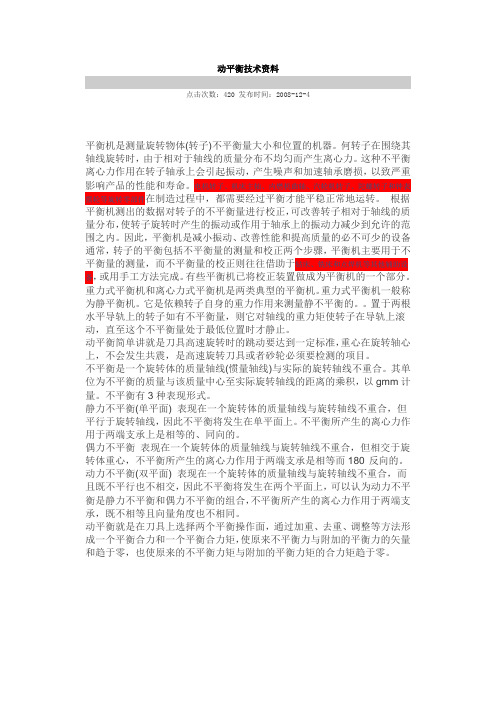
动平衡技术资料点击次数:420 发布时间:2008-12-4平衡机是测量旋转物体(转子)不平衡量大小和位置的机器。
何转子在围绕其轴线旋转时,由于相对于轴线的质量分布不均匀而产生离心力。
这种不平衡离心力作用在转子轴承上会引起振动,产生噪声和加速轴承磨损,以致严重影响产品的性能和寿命。
电机转子、机床主轴、内燃机曲轴、汽轮机转子、陀螺转子和钟表摆轮等旋转零部件在制造过程中,都需要经过平衡才能平稳正常地运转。
根据平衡机测出的数据对转子的不平衡量进行校正,可改善转子相对于轴线的质量分布,使转子旋转时产生的振动或作用于轴承上的振动力减少到允许的范围之内。
因此,平衡机是减小振动、改善性能和提高质量的必不可少的设备通常,转子的平衡包括不平衡量的测量和校正两个步骤,平衡机主要用于不平衡量的测量,而不平衡量的校正则往往借助于钻床、铣床和点焊机等其他辅助设备,或用手工方法完成。
有些平衡机已将校正装置做成为平衡机的一个部分。
重力式平衡机和离心力式平衡机是两类典型的平衡机。
重力式平衡机一般称为静平衡机。
它是依赖转子自身的重力作用来测量静不平衡的。
置于两根水平导轨上的转子如有不平衡量,则它对轴线的重力矩使转子在导轨上滚动,直至这个不平衡量处于最低位置时才静止。
动平衡简单讲就是刀具高速旋转时的跳动要达到一定标准,重心在旋转轴心上,不会发生共震,是高速旋转刀具或者砂轮必须要检测的项目。
不平衡是一个旋转体的质量轴线(惯量轴线)与实际的旋转轴线不重合。
其单位为不平衡的质量与该质量中心至实际旋转轴线的距离的乘积,以gmm计量。
不平衡有3种表现形式。
静力不平衡(单平面) 表现在一个旋转体的质量轴线与旋转轴线不重合,但平行于旋转轴线,因此不平衡将发生在单平面上。
不平衡所产生的离心力作用于两端支承上是相等的、同向的。
偶力不平衡表现在一个旋转体的质量轴线与旋转轴线不重合,但相交于旋转体重心,不平衡所产生的离心力作用于两端支承是相等而180°反向的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统组成 系统主要由大容量数据采集器、传感器及动平衡软件组成。
特色功能 振动分析:由计算机、计算机软件与采集箱组成的采集系统实时采集设备振动信号,并提 供了时域波形、频谱图、相关分析、概率分析、轴心轨迹、时间三维谱等分析方法。通过这 些分析手段可以判断设备状态是否良好、或诊断设备存在何种故障,从而避免盲目地进行动 平衡校正。 试重估算:根据输入的转子资料自动估算出合理的动平衡试重质量,并可给出动平衡效果 的结论。
现场动平衡概念和必要性
用机械中包含着大量的作旋转运动的零部件,例如各种传动轴、主轴、电动机和汽轮机 的转子等,统称为回转体。在理想的情况下回转体旋转时与不旋转时,对轴承产生的压力是 一样的,这样的回转体是平衡的回转体。但工程中的各种回转体,由于材质不均匀或毛坯缺 陷、加工及装配中产生的误差,甚至设计时就具有非对称的几何形状等多种因素,使得回转 体在旋转时,其上每个微小质点产生的离心惯性力不能相互抵消,离心惯性力通过轴承作用 到机械及其基础上,引起振动,产生了噪音,加速轴承磨损,缩短了机械寿命,严重时能造 成破坏性事故。为此,必须对转子进行平衡,使其达到允许的平衡精度等级,或使因此产生 的机械振动幅度降在允许的范围内。
整机现场动平衡技术
整机现场动平衡技术是为了解决工艺平衡技术中存在的问题而提出的。 工艺平衡法的测试系统所受干扰小,平衡精度高,效率高,特别适于对生产过程中的旋 转机械零件作单体平衡,目前在动平衡领域中发挥着相当重要的作用,汽轮机、航空发动机 普遍采用这种平衡方法。但是,工艺平衡法仍存在以下问题:
(1)平衡时的转速和工作转速不一致,造成平衡精度下降。例如:有不少转子属于二阶 临界转速的扰性转子,由于平衡机本身转速有限,这些转子若采用工艺平衡,则无法有效的 防止转子在高速下发生变 形而造成的不平衡。
大大节省拆卸、运输、安装、维修的费用,进而为企业带来明显的经济效益。 HG-3568、 HG-3638、HG-3538 系列的动平衡系统都可以在现场迅速判断设备运行状态,分析出设备是 否存在动平衡不良故障。如果存在,则可以利用系统提供的试重法或影响系数法进行动平衡 校正,系统将自动解算出加(减)配重的质量大小和角度。许多情况下,一次动平衡校正就 可以去除转子(轴系) 90%以上的不平衡量。
那么,车辆在什么情况下需要做动平衡呢? 当您在行车过程中发现车辆高速行驶时方向盘抖动或是车轮出现某种有节奏的异响时, 就有可能是车轮该做动平衡了,尤其是当更换轮胎、轮毂或是补过轮胎后、车轮受过大的撞 击、由于颠簸导致平衡块丢失等都应该对车轮做动平衡。别小看了车轮的动平衡,也别小瞧 了那一块块不起眼的小铅块,如果车轮动平衡不好会造成轮胎的异常磨损,也会影响车辆的 稳定。特别是前轮,震动会通过转向系统传到方向盘,不但影响司机朋友的驾驶,严重的还 会导致转向系统的松旷。
现代的动平衡技术是在本世纪初随着蒸汽透平的出现而发展起来的。随着工业生产的飞 ቤተ መጻሕፍቲ ባይዱ发展,旋转机械逐步向精密化、大型化、高速化方向发展,使机械振动问题越来越突出。 机械的剧烈振动对机器本身及其周围环境都会带来一系列危害。虽然产生振动的原因多种多 样,但普遍认为“不平衡力”是主要原因。据统计,有 50%左右的机械振动是由不平衡力引起 的。因此,有必要改变旋转机械运动部分的质量,减小不平衡力,即对转子进行平衡。
其它技术指标 存储:大于 20G 体积:285×240×50mm (采集箱) 重量:2200g(采集箱)
HG-3638 双通道现场平衡系统 概述 现场动平衡技术是工矿企业应用极为广泛的实用技术。利用现场动平衡技术可以在不改变 设备原有安装条件的基础上,利用很短的时间解决设备转子或轴系动平衡不良的故障,从而
“高速切削”目前还是一个发展中的相对概念。对于不同的工件材料和不同的加工工序, 要求达到的切削速度并不相同,通常可将切削速度(或进给速度)较普通切削提高 5~1O 倍归 入高速切削范畴。
高速切削的实现需要建立在机床、刀具等相关领域最新技术成果的基础上。目前,高速 切削主要应用于在加工中心机床上采用铣刀、镗刀、孔加工刀具等旋转刀具进行的切削加工, 所用加工中心机床的主轴转速通常在 lO000r/min 以上。当加工中心机床主轴转速高达 lO000r/min 以上时,高速旋转的刀具(包括夹持刀柄)存在的不平衡量所产生的离心力将对主 轴轴承、机床部件等施加周期性载荷,从而引起振动,这将对主轴轴承、刀具寿命和加工质 量造成不利影响。因此,高速切削加工对旋转刀具提出了严格的动平衡要求。研究高速旋转 刀具的动平衡技术、有效控制刀具不平衡量是研制开发和推广应用高速切削技术的必要前提 和配套技术。德国的切削行业对高速旋转刀具动平衡技术做了大量研究开发工作,本文结合 有关报导对高速切削刀具动平衡技术的研究现状及一些相关问题作一介绍。 2.动平衡的一般概念
功能 向导式动平衡功能:软件根据测量数据快速解算出配重质量及其角度,提供了完全向导式 的动平衡功能,操作者只要按向导进行就可以轻松完成动平衡校正。 矢量分解:对解算出的平衡质量进行合理的矢量分解, 以满足现场安装的客观要求。 平衡方法:试重法和影响系数法;
技术指标 振动测量精度:±5% 转速测量范围:60~20000r/min 转速测量精度:± 1‰± 1 个字 显 示:全中文界面
功能 向导式动平衡功能:软件根据测量数据快速解算出配重质量及其角度,提供了完全向导式 的动平衡功能,操作者只要按向导进行就可以轻松完成动平衡校正。 矢量分解:对解算出的平衡质量进行合理的矢量分解, 以满足现场安装的客观要求。 平衡方法:试重法和影响系数法; 技术指标 振动测量精度:±5% 转速测量范围:60~20000r/min 转速测量精度:± 1‰± 1 个字 显 示:全中文界面
其它技术指标 存储:大于 100M 体积:212×195×50(mm)(采集器) 重量:1700g(采集器) 单面转子试重法一次平衡报告
刀具动平衡的发展与展望
1.引言 从二十世纪八十年代开始,随着现代制造技术的快速发展,金属切削加工进入了以高速切 削为代表的发展阶段。由于高速切削技术具有明显的技术优势,目前已在工业发达国家的汽 车、飞机、模具等工业制造领域得到广泛应用,产生了巨大的技术经济效益,并显示出在二 十一世纪现代制造技术发展中具有的重要地位和广阔应用前景。
动平衡常识
很多细心的朋友都会发现,在汽车车轮的轮毂边缘上,有的有一块或多块大小不等的小 铅块。与各式各样漂亮的轮毂相比,这些个小铅块好像有些不太相衬。但正是这一个个小小 的铅块,对汽车高速行驶的稳定性起着非常重要的作用。
汽车的车轮是由轮胎、轮毂组成的一个整体。但由于制造上的原因,使这个整体各部分 的质量分布不可能非常均匀。当汽车车轮高速旋转起来后,就会形成动不平衡状态,造成车 辆在行驶中车轮抖动、方向盘震动的现象。为了避免这种现象或是消除已经发生的这种现象, 就要使车轮在动态情况下通过增加配重的方法,使车轮校正各边缘部分的平衡。这个校正的 过程就是人们常说的动平衡。
各种动平衡仪简介:
HG-3568 双通道现场动平衡系统
概述 现场动平衡技术是工矿企业应用极为广泛的实用技术。利用现场动平衡技术可以在不改变 设备原有安装条件的基础上,利用很短的时间解决设备转子或轴系动平衡不良的故障,从而 大大节省拆卸、运输、安装、维修的费用,进而为企业带来明显的经济效益。 HG-3568、 HG-3638、HG-3538 系列的动平衡系统都可以在现场迅速判断设备运行状态,分析出设备是 否存在动平衡不良故障。如果存在,则可以利用系统提供的试重法或影响系数法进行动平衡 校正,系统将自动解算出加(减)配重的质量大小和角度。许多情况下,一次动平衡校正就 可以去除转子(轴系) 90%以上的不平衡量。
现代,各类机器所使用的平衡方法较多,例如单面平衡(亦称静平衡)常使用平衡架,双 面平衡(亦称动平衡)使用各类动平衡试验机。静平衡精度太低,平衡时间长;动平衡试验机 虽能较好地对转子本身进行平衡,但是对于转子尺寸相差较大时,往往需要不同规格尺寸的 动平衡机,而且试验时仍需将转子从机器上拆下来,这样明显是既不经济,也十分费工(如 大修后的汽轮机转子)。特别是动平衡机无法消除由于装配或其它随动元件引发的系统振动。 使转子在正常安装与运转条件下进行平衡通常称为“现场平衡”。现场平衡不但可以减少拆装 转子的劳动量,不再需要动平衡机;同时由于试验的状态与实际工作状态二致,有利于提高 测算不平衡量的精度,降低系统振动。国际标准 ISOl940 一 1973(E)“刚体旋转体的平衡精度” 中规定,要求平衡精度为 G0.4 的精密转子,必须使用现场平衡,否则平衡毫无意义。