基于CAN总线的电动汽车控制系统设计
基于CAN总线的并联混合动力汽车能量控制系统研制

测试 与控 制 ・
路 为能 量控 制单元 ( 5 # ) 的C A N节 点板 卡 ,调 试 软件 包 括
微 处理 器 初始 化 、内燃 机 目标扭 矩 计算 子 程 序 、模 糊 逻 辑 控 制 策 略 子 程 序 ,C A N 总 线 初 始 化 程 序 、发 送 程 序
等 ;② 双 系 统 调 试 ,硬 件 电 路 为 2块 C A N节点板 卡 ,
模糊逻辑控制
策略实际由两部分
处 ,一并在此提出:①能量控制系统采用的模糊逻辑控
制 策 略虽 然 原 理 清 晰 、易 于 实 现 但 本 质 还 是 个 开 环 系
< [ = = = 戛 垂 量 旦 壁 翌 兰 圈
I
.
统 ,控制结果还不够精确 ;②模糊逻Fra bibliotek控制策略有两输
入 ,可 以控制 在 内燃 机最 高 燃油 效 率前 提 下 ,实 现 蓄 电
其 中一块 为能 量控 制系统 ( 即5 # ) ,另一 块用 于 仿 真 C A N 总线 上其 他 四个单 元 信号 ,主要 内容是 虚拟 1 # 、2 # 、4 #
图 4 隶 属 度 函 数 示 意 图
通过 C A N 总线 向 5 #发送 信 息 ,中 断接 收 5 #向 2 鼻 、3 #
真【 J 】 . 系统仿真学报 , 2 0 0 5 , 3 .
( 上接第 1 4 3页 )
论 控 制线 路 发生 短 路 、接地 或 断线 故 障 ,系统 均 能 可 靠 跳 闸 。此外 ,系统 的 多功 能液 晶显 示 装 置 为工 作人 员 提
5 结束 语
利用 单 片机 构成 矿 用 隔爆 型低 压 开关 的 各种 故 障检 测 系 统 .完 全 改 变 了传 统 的模 拟 式 保 护 系 统 ,其 灵 活 性 、可靠 性 和先 进 性 显而 易见 。用 相 敏保 护 来 实现 井下 线 路 发生 三相 短 路的 主保 护 ,解 决 了长 距离 大容 量 鼠笼
基于CAN总线的汽车电气控制系统设计

基于CAN总线的汽车电气控制系统设计随着汽车行业的高速发展,其电气控制系统的发展也在逐渐加快,各种控制系统的更新换代促进了我国汽车行业的发展。
在该文中介绍的是CAN总线为基础的汽车电气控制系统,通过该系统的应用能够将企业的控制信号转变为信息流,然后通过分布式的控制模式来对汽车的电气控制系统进行更加高效的控制,这种控制模式打破了传统的汽车电气控制系统单一线束限制,保证了汽车电气控制系统在使用的过程中具有更高的利用率。
标签:CAN 总线;汽车;电气控制系统引言:现阶段,电子信息技术逐渐应用到了汽车领域中,而汽车总线技术的实现与发展,为汽车通信方式带来了新的发展途径,如今,怎样以总线技术为依托,对汽车的电气控制系统进行有效构建,已经成为当前领域内部关注的重点。
而以CAN为基础的总线技术,以其线路简单、扩展方便、抗干扰性强、传输速度快等优势,越来越受到汽车电子领域的重视,但由于该技术的成本相对较高,我国很多大型客车还无法对其广泛运用,因此,需要对该技术进行进一步研究。
1汽车电气控制系统的现状汽车电气控制系统需要许多驱动大功率的用电器件,如远光灯、近光灯、前后转向信号灯、刹车灯、前后雨刮器电机、电动车窗、电动后视镜、空调压缩机等行车必须的用电设备。
大型客车更有电视机、饮水机、通道灯、阅读灯等服务于乘客的用电设备。
汽车底盘也有许多传感器如速度传感器、水温传感器、机油传感器、刹车传感器、挡位传感器等等,加上诸多开关如门开关、发动机舱开关和仪表盘的各种开关等。
这些设备和传感器都需要通过导线送到中央控制器上,或从中央控制器送下来,形成了大量导线捆成的线扎,这种传统的汽车电气控制方式称为点对点的控制方式.随着车上电子装置的增加使连接的电子线路迅速膨胀,线束越来越复杂。
在汽车设计、装配、维护中的负担甚至到了无法承受的程度,而且线路接头的增加是引起安全问题的隐患。
另外线的重量和占用的空间也都是值得考虑的问题,重量的增加意味着降低效率。
基于CAN总线的汽车电子控制系统单元设计

在经济不断发展的今天,各个行业和领域也都在悄无声息地发生着变化,在此背景下汽车行业的内部也悄悄地发生了变化。
汽车控制系统也早已不再是早些年那些简单的系统节点,代替其的是多节点和大数据量的系统单元构造,特别是当今时期,汽车制造商将各项功能都浓缩在汽车系统之内,使汽车的功能逐渐完善起来,但随之而来的问题也是显而易见的,这会为汽车的电子控制系统的单元设计带来较大的难题。
本研究将立足于CAN通信角度,就这方面的内容展开简要探讨。
1基于CAN总线的汽车电子控制系统的可行性研究现在汽车控制系统和传统汽车控制系统最大的区别就是现代汽车控制系统将汽车总线控制系统成功的引入到汽车控制系统当中,使其成为汽车电子控制数据的传输网络。
在汽车的内部有各种复杂的控制器和电子设备,而汽车总线控制系统就能够更好的为这些设备提供一个最优良的数据交换渠道,而这种数据交换渠道又是多元开放的[1]。
所以这种渠道能够更好地将汽车控制系统当中的多种功能数据混乱冲突问题合理解决。
当前环境下汽车的总线控制系统的实现有较多的方式,但是笔者认为最佳的方式就是基于CAN总线的控制方法,这种方法的数据结构是短帧数据结构,此外这种方法还结合了非破坏性的总线仲裁技术,在某种程度上来说是具有很可靠的高实效性特点。
CAN总线的纠错能力相对于其他技术来说更加的成熟,支持差分收发等,所以对于类似汽车系统这一类的高干扰工作环境而言,这类电子控制系统具有更好的适应性。
而当前的汽车系统对于电子控制系统的要求也越来越高,这主要是由汽车本身的技术性发展所决定的,不仅需要更高的可靠性,还需要更好的实时性,因此在对通信协议的选择上通常采用多指令或多响应式的方式。
所以CAN总线控制系统在当前来说是应用最为广泛的,也是应用最为稳定的汽车电子控制系统,它具有更好的发展前景。
2基于CAN总线的汽车电子控制系统单元设计研究2.1基于CAN总线的汽车电子控制系统单元设计方案对于基于CAN总线的汽车电子控制系统进行单元设计需要合理地对CAN驱动器(收发器)、CAN控制器、中心微处理器和抗干扰制动方式的合理选择与调用。
基于CAN总线的汽车电子控制系统设计与实现

基于CAN总线的汽车电子控制系统设计与实现摘要:本文以汽车电子控制领域为研究对象,探讨了基于CAN总线的汽车电子控制系统设计与实现。
通过分析CAN总线的技术特点和优势,以及对汽车电控系统的需求分析和功能设计,从硬件设计、底层通信协议、上层应用程序等方面进行了综合设计,最终实现了一个基于CAN总线的汽车电子控制系统原型。
该系统具有较高的实时性和可靠性,能够满足多种汽车电控应用的需求,为汽车电子控制技术的研究和应用提供了一定的参考和借鉴价值。
关键词:汽车电子控制;CAN总线;通信协议;应用程序;设计与实现一、引言汽车电子控制技术是当今汽车制造业中不可或缺的一部分,其对汽车性能、安全性、经济性等方面起着至关重要的作用。
而CAN总线作为一种广泛应用于汽车电子控制领域的通信技术,具有诸多优势,如高效率、可靠性强、扩展性好等,因此得到广泛应用。
本文旨在探讨基于CAN总线的汽车电子控制系统的设计与实现,为汽车电控技术的研究和应用提供一定的参考。
二、CAN总线技术特点分析1. 高通信效率:CAN总线的高通信效率主要得益于其采用的广播式通信机制和时间触发模式的工作方式。
CAN总线采用了广播式通信,即总线上所有节点都可以接收到发送的数据帧,而不需要像其他网络中那样进行点对点的通信,从而减少了通信时延和网络负担。
这种机制使得CAN总线在数据传输时的效率更高,尤其适合于多点控制和监测应用。
其次,在CAN总线中,节点的发送和接收是基于时间触发模式进行的。
每个节点在总线上均有机会发送数据帧,发送的优先级会根据数据帧的标识符确定,越低的标识符拥有更高的优先级。
因此,节点能够快速有效地完成数据的传输和接收,具有更高的通信效率。
CAN总线还支持多设备同时接入通信网络。
对于汽车电控系统而言,这意味着,可以在总线上同时接入多个传感器和执行器,使得汽车系统的控制更加全面和精细。
因此,,CAN总线采用的广播式通信机制和时间触发模式的工作方式,能够实现高速数据传输,有效减少通信时延,同时支持多设备同时接入通信网络,因此具有高通信效率的特点。
基于CAN总线的汽车电子控制系统单元设计

现在汽车控制系统和传统汽车控制系统最大的区别就是现代 存 储 。
汽车 控 制 系统 将 汽 车 总线 控 制 系统 成 功 的引 入 到 汽车 控制 系统 当 P h i l i p s公 司 所 生 产 的 Y J A1 0 5 0可 以 据的传输 网络。在汽车的内部有各种 P C A 8 2 C 2 5 0总线 收发 驱 动器 。Y J A 1 0 5 0为物 理 总线 和 C A N控 制 器 复杂 的控 制 器 和电子 设备 , 而 汽 车总线 控制 系统就 能 够更 好 的为 这 之 间提供 了最 佳的接 口 , 将C A N总线 的差动 发送 功能 和接 收功 能更 些设 备 提供 一个 最优 良的数 据交 换渠 道 , 而这 种数 据 交换 渠 道又 是 好 的实 现 。对 Y J A 1 0 5 0的应用 将传 输距 离 大 幅度增 加 , 且更 好地 将 这 样 就能够 在汽 车环 境下 将系 统 的瞬间 多元开放的【 q 。所以这种渠道能够更好地将汽车控制系统当中的多 电子辐射 干扰 降低 到最 小 。
关键 词 : C A N总 线 ; 汽 车 电子控 制 系统 ; 单 元设计
在 经济 不断 发展 的今 天 , 各个 行业 和 领域 也 都在 悄 无声 息地 发 阐述 的过程 中 , 笔 者 主要采 用 Y J A 1 0 5 0和 C 8 0 5 1 F 0 4 2 总 线收 发器 所 生 着变 化 , 在此 背景 下 汽车 行业 的 内部也 悄 悄地 发 生 了变化 。汽 车 构成 的 电子控 制系 统单 元 的 C A N通信 模块 来进 行研究 和 分析 。
基于CAN总线的智能小车控制系统研制概要
西南交通大学硕士学位论文基于CAN总线的智能小车控制系统研制姓名:张文杰申请学位级别:硕士专业:机械电子工程指导教师:肖世德20090401摘要智能小车是一个集环境感知、规划决策、自动行驶等功能于一身的光机电一体化系统,它集中运用了计算机、传感、信息、通信、导航、人工智能及自动控制等高新技术。
CAN总线是一种具有高保密性、高抗干扰能力、有效支持分布式控制和实时控制的串行通信网络。
本论文将当前流行的CAN现场总线技术应用到智能小车上,为西南交通大学机电测控实验中心研制分布式控制的智能小车实验平台。
论文首先概要介绍了与智能小车相关的机器人领域和智能车辆领域的研究现状,给出了以电动小车为物理平台的智能小车的概要设计。
然后介绍了智能小车运动控制系统的硬件电路的设计与实现。
智能小车选择飞利浦公司的 LPC2290微控制器作为核心处理器,利用其高速的处理能力和芯片内部集成的丰富的外设接口资源,并结合CAN总线接口为智能小车提供了一个功能强大并具有一定扩展性的硬件平台。
论文结合嵌入式系统的特点说明了在智能小车中引入嵌入式操作系统的价值,介绍了嵌入式操作系统u C/OS—II在微处理器LPC2290的移植过程和开发方法。
论文根据智能小车各个模块的功能,详细描述了小车控制系统各个任务的执行流程。
由于采用了统一的CAN总线通讯协议,使得各个模块避免了重复繁琐的底层软硬件开发和调试工作,提高了智能小车开发效率。
研制的智能小车样机初步实验证明了本文叙述的技术方案的有效性和正确性,对于智能运输车辆开发具备一定参考和实用价值。
关键词:智能小车; 运动控制; CAN总线; 嵌入式系统;la C/OS—IIABSTRACTIntelligent vehicle is an integration system of optical system and mechatronics system combined with environmental perception、path planning and decision making and automatic driving functions using computer, sensing, information, communications,navigation,artificial intelligence and automatic control technology. CAN Bus is a type of serial communication network with many features such as high confidentiality,hi曲anti—interference ability,the effective support of distributedcontr01and real—time contr01mode. A distributed control experiment platform of intelligent vehicle is designed based on CAN bus technologyin mechatronics measuring and monitoring experiment center of Southwest Jiaotong University.At first,the key technology of intelligent vehicle is summarized in the paper. And then the design of control circuit and interface circuits for intelligent vehicle are presented.With high processor speed and abundant interface support LPC2290is used as the core processor of contr01circuits.It can afford an extensible platform for the intelligent vehicle combined with the application of CAN bus.Combined with the characteristics of embedded system the value of embedded operating system which is introduced into the intelligent vehicle is showed.The whole process of la C/OS——II operating system is migrated to LPC2290CPU. Based on the functions of intelligent vehicle the flow chart of every task module is described in thepaper.It is independent between modules and convenient for mutual communication by application of CAN Bus.Owning to the use of uniform communication agreement,we can avoid repeated bottom development or debugging of software and hardware.The test shows that the intelligent vehicle design is the effectiveness and correctness that can be taken as a reference for the intelligent transport vehicles. Keywords:InteI I igent VehiCle:Motion OontroI:CAN—Bus:Embedded System; uC/OS—II西南交通大学曲南爻遗大罕学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
基于CAN总线的电动汽车分布式控制系统研究

动 汽 车分 布 式控 制 系统 在 故 障 及 诊 断 上 得 到 了
较好 的结 果,但 故障处理 并不是特别 的理想 。 故障处理作 为诊 断的后续 工作 ,需达到较高 的 水准 ,否则将会造成系统故障 的反复 出现 。结
故障监测及诊断进行论述。
2 . 1故 障监 测的对 象 【 关键词 】电动汽车 分布 式 控制 系统 故 障 诊断
基于 C A N 总 线 的 电 动 汽 车 分 布 式 控 制 系
维修地点 , 运送过程 中, 可 能会 出现新 的故障 , 利用 DS U来 分析故 障逻辑 过程,可更 好的进 行分析故障 , 实现同时对多种 故障的有效处理 。
基 于 CA N 总线的 电动 汽车分布式控 制系 统 ,在 日常 的应用中比较广泛,其故障及诊断
并不 容 易 。 为 了 能 够 更 好 的 诊 断 系 统 的故 障 ,
2 ・ 2故降诊断原理
相对 于其他 的系 统而言 ,基于 CA N总 线 的 电动汽车分布式控制系 统在故 障诊 断方面 , 显得稍微有些简洁 。该系 统在应 用过程 中,不
汽车电子 ・ A u t o mo t i v e E l e c t r o n i c s
基于 C A N总线的电动汽车分布式 控制系统研 究
文/ 吴静波 杨亚峰 王 永巍 冯 嘉欣
2 故 障 监 测 及 诊 断
汽 车上 的 电子控 制 系统越 来 越 复杂 ,传统 的检 测 工具 对现 代 电子控 制 设备 故 障的检 测很 难 奏 效, 直接 影响到汽车的故障诊 断, 无 法运 用较短 的时 间来修 复。基 于C A N总 线 的 电 动 汽 车 分 布 式 控 制 系统 ,是 比较 常 见 的汽 车 电子 控 制 系统 , 通 过 对 该 系 统 的 故 障 分析 及诊 断研 究,能够 为 日后 的 修理 工作 提供 更多 的参 考,并 且 逐 步的健 全 电子控 制 系统 的诊 断 方 法 和 处 理 方 法 , 为 汽 车 的修 理 提 供 更 多 的保 障 。
基于CAN总线的汽车电气控制系统设计

基于CAN总线的汽车电气控制系统设计作者:李利飞闫瑞杰李海香来源:《山东工业技术》2019年第06期摘要:本文主要探讨了汽车电气控制系统中CAN总线技术的设计和应用的相关问题。
文章首先从两个方面分析了之所以要基于CAN总线设计汽车电气控制系统的原因;然后从总体架构设计、ECU节点设计以及软件架构设计三个方面探讨了基于CAN总线的汽车电气控制系统的设计与实现。
关键词:CAN总线;电气控制系统;汽车1 基于CAN总线汽车电气控制系统的必要性CAN通信协议是德国公司博世于一九八六年开发出来的面向汽车的通信协议,在其进行了标准化之后不仅在欧洲汽车网络中广为应用,而且在美国和日韩等国家也得到了广泛的采用。
选择基于CAN总线技术构建汽车电气控制系统符合当前国际汽车发展的潮流,其必要性主要体现在以下两个方面。
一方面,CAN总线技术是一种成熟的技术。
自1986年诞生以来,CAN经过了几十年的发展,相关的技术标准已经非常成熟,而且在汽车领域也得到了全面的推广。
在其发展的早期就已经得到了欧洲汽车领域的大力支持,之后又在世界范围内的竞争中战胜了其他总线标准,成为日本和韩国汽车商的首选,而且在美国CAN也淘汰了本土的J1850,攻占了美国市场。
这无疑使其兼容性和通用性得到巨大的提升,对于汽车电气控制系统的设计提供巨大的便利。
另一方面,CAN总线技术还拥有巨大的技术优势。
相较于其他一些总线技术,CAN总线使用的是更加先进的编码技术以及总线仲裁技术,可以更有效地应付125Kbps以上的传输。
虽然在125Kbps以下时CAN的优势并不明显,但是在汽车领域电气化不断提高的背景下,125Kbps的带宽已经远远达不到相关的要求,而CAN传输率可以达到11Mbps,可以很好地满足传输的需要。
CAN当前汽车电气控制系统的传输需求,同时成本也更低,因此基于CAN总线设计电气控制系统也更加实际、可行。
2 基于CAN总线汽车电气控制系统的设计与实现2.1 整体架构设计在汽车的电气控制系统设计中,CAN总线可以起到为通信介质提供平台的作用。
基于CAN总线的电动车控制系统设计

基于CAN总线的电动车控制系统设计当前全球汽车工业面临金融危机和能源环境问题的巨大挑战,实现汽车能源动力系统的电气化,已经成为汽车产业的趋势。
提高电动汽车上的各个控制单元间通信的可靠性和实现高传输速率,选择CAN总线协议。
CAN总线为多主工作方式,网络上任何节点均可在任意时刻向其他节点发送信息。
它采用非破坏性的基于优先权的总线仲裁技术,可靠性高。
CAN总线通信距离长达10 km,通信速率最高可达1 Mb/s。
CAN通信系统抗干扰性好,工作稳定。
某个节点出现故障,不会导致整个系统通信的不正常。
由于采用短帧的报文结构,数据传输时间短,具有很强的抗干扰性,具有高效的非破坏总线仲裁,出错检测和故障自动关闭等优点。
1 控制系统整体结构电动车控制系统由电池管理、充电机、电动机和整车控制等模块组成。
本系统总体结构如图1所示。
由图1知,CAN通信网络上共有4个通信节点。
整车控制器接收BMS、CCS、电机控制器的报文提供的各种参数;充电机接收BMS发送的控制信息并根据报文数据的电压电流设置来工作;电机控制器接收BMS发送的电池状态信息设置来工作,同时电机控制器接收由整车控制器发送的控制信息并根据报文数据的转矩设置来工作。
2 CAN总线节点的硬件电路设计整车控制模块这一节点所实现的功能主要是接收其他节点的数据信息,通过控制算法等进行数据处理,然后发送控制信息给电机控制器,从而实现电动车的正常功能运行。
整车控制节点是基于STM32F103VE设计的。
ARMCortex TM-M3是一款高性能、低成本、低功耗的32位BISC处理器,可在高达72 MHz的频率下运行,拥有512 KB的片内Flash程序存储器,具有64 KB的RAM数据存储器,可进行高性能的CPU访问。
该徽控制器包含1个USB2.0全速(12 Mb/s)设备、1路CAN2.0B 通道、1个通用DMA控制器、3个16位的A/D转换器和1个16位的D/A转换器。
基于CAN总线的电动汽车车门控制系统的设计
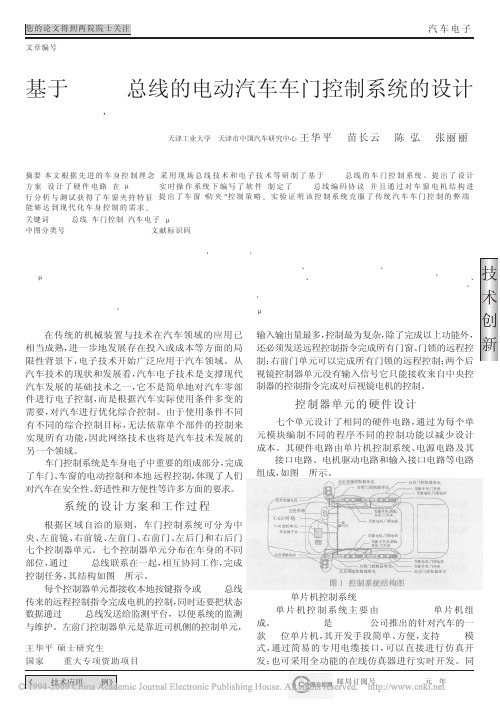
限性背景下,电子技术开始广泛应用于汽车领域。从 制;右前门单元可以完成所有门锁的远程控制;两个后
汽车技术的现状和发展看,汽车电子技术是支撑现代 视镜控制器单元没有输入信号它只能接收来自中央控
汽车发展的基础技术之一,它不是简单地对汽车零部 制器的控制指令完成对后视镜电机的控制。
件进行电子控制,而是根据汽车实际使用条件多变的 需要,对汽车进行优化综合控制。由于使用条件不同 有不同的综合控制目标,无法依靠单个部件的控制来 实现所有功能,因此网络技术也将是汽车技术发展的 另一个领域。
4.1 引入 μC/OS- II 实时操作系统 μC/OS- II 操作系统是基于优先级占先式的实时 内核,因此实时性要比非占先式内核要好。它包含了 实时内核、任务管理、时间管理、任务间通信同步和内 存管理等功能;它的绝大部分代码都是用 C 语言编 写,可移植性强,可以在绝大多数 8 位、16 位、32 位以 至 64 位微处理器、微控制器上运行。 MC9S12D64 是 16 位微处理器,具有 4K 字节的片 内 RAM 和 64K 的 Flash Rom,支持分页寻址,完全可以 运行 μC/OS- II 操作系统。μC/OS- II 实时操作系统可以 支持多达 64 个任务,并且能有效地对任务进行调度; 对各任务赋予不同的优先级可以保证任务及时响应, 且降低了程序的复杂度,方便了程序的开发,但在设计 过程中必需考虑代码容量和系统的实时性与安全性。 4.2 任务的划分与调度 整个程序由操作系统和一系列用户程序组成。系 统中创建了一个启动任务负责时钟的初始化与启动、 CAN 控制模块的初始化和启动、中断启动、模数转换 模块初始化及任务的划分等,在交出 CPU 的使用权之 后,只做一些空闲处理。 用户程序根据控制任务的重要性和实行性可以 分成六个具有不同优先级的任务,包括电机控制、键 盘输入、A/D 采样、电源模块控制、系统监控、状态显 示。除了这些主要任务之外,还有两个中断服务子程 序:一个提供时钟节拍,用于提供周期性信号源;一个 为 CAN 接收中断,用于把数据写入环形缓冲区。表 2 为任务划分表。
基于CAN总线的汽车控制系统设计及实现

基于CAN总线的汽车控制系统设计及实现随着科技的不断发展,汽车行业也在不断地进步和创新。
CAN总线技术的应用对汽车控制系统来讲是一个重大的突破,不仅可以提高汽车的安全性,还可以提高其性能和舒适度。
本文将围绕基于CAN总线的汽车控制系统的设计和实现进行探讨。
一、CAN总线技术的应用在汽车行业中,各种各样的传感器和执行器需要连接一个或多个控制单元,以实现对车辆的各种操作和控制。
CAN总线技术具有可以在单个总线上连接多个设备的能力,以及在高速传输过程中可以进行实时数据交换的能力。
因此,CAN总线技术被广泛应用于汽车的电子控制系统。
它不仅可以帮助提高汽车的性能,还可以提高其安全性。
使用CAN总线技术的汽车控制系统包括多个控制单元。
每个控制单元都可以根据需要发送和接收数据。
数据可以分为多个不同的数据包,在汽车控制系统中运行,以便控制单元之间进行通信。
二、汽车控制系统的设计在设计基于CAN总线的汽车控制系统时,需要考虑多个因素,例如:1. 控制单元的数量:需要确定需要使用多少个控制单元以及每个控制单元的功能。
2. 数据传输速度:需要确定需要多快的数据传输速度来确保实时数据交换。
3. 数据传输距离:需要确定需要多长的数据传输距离来确保性能和安全性。
4. 数据包的大小:需要确定数据包的大小,以提高数据传输的效率。
在确定所有这些因素后,可以开始设计汽车控制系统的电路图。
电路图中应包括CAN总线控制器,多个节点控制单元,以及实际执行操作的传感器和执行器。
三、控制器编程和实现编写代码以控制每个控制单元,并在真实设备上测试运行。
测试应包括测试电路和测试代码。
如果出现问题,应尝试识别和解决问题,以确保系统的正常运行。
在汽车控制系统中,每个控制单元都应定期检查总线上是否有新数据包,并应根据需要发送数据包。
如果检测到错误或异常情况,控制单元应能够发送警告或停机信号。
四、实现结果一旦系统开发完成,并通过所有测试,就可以将系统部署到实际设备上并进行使用。
基于CAN总线的汽车电动车窗控制系统设计毕业设计

基于CAN总线的汽车电动车窗控制系统设计毕业设计目录摘要............................................... 错误!未定义书签。
ABSTRACT........................................... 错误!未定义书签。
1绪论.. (1)1.1 研究背景 (1)1.2 汽车车载网络技术概述 (2)1.3 电动车窗控制技术的发展概况 (2)1.4 课题的主要内容和意义 (3)1.4.1 课题的主要内容 (3)1.4.2 课题的意义 (3)1.5 本章小结 (3)2 CAN总线 (5)2.1 CAN简介 (5)2.2 按照ISO/OSI参考模型CAN的分层结构 (6)2.3 CAN总线数值的特性 (6)2.4 CAN协议的报文帧结构形式 (7)2.4.1 数据帧 (7)2.4.2 遥控帧 (9)2.4.3 错误帧 (9)2.4.4 过载帧 (9)2.4.5 帧间隔 (9)2.5 报文接收和仲裁 (10)2.6 CAN的数据错误检测 (10)2.6.1 错误处理 (10)2.6.2 错误状态种类 (12)2.6.3 错误检测规则 (12)2.7 位时序 (13)2.8 本章小结 (14)3电动车窗的硬件设计 (15)3.1 主控节点的硬件设计 (15)3.1.1 微控制器介绍 (15)3.1.2 CAN模块 (17)3.2 车窗节点的的设计 (23)3.3 本章小结 (27)4基于CAN的车窗控制系统软件设计 (28)4.1 软件开发的环境 (28)4.2 CAN模块 (29)4.2.1 系统主程序 (29)4.2.2 系统的初始化 (29)4.2.3 CAN报文的发送 (30)4.2.4 CAN报文接收 (31)4.3 驱动模块 (32)4.4 本章小结 (33)5车窗防夹功能模拟测试与分析 (34)6总结与展望 (36)6.1 总结 (36)6.2 展望 (36)参考文献 (37)致谢............................................... 错误!未定义书签。
汽车CAN总线网络控制系统设计与实现

汽车CAN总线网络控制系统设计与实现一、本文概述随着汽车工业的快速发展和智能化水平的提高,汽车内部电子控制系统的复杂性和集成度也在不断提升。
汽车CAN(Controller Area Network)总线网络控制系统作为现代汽车的核心技术之一,对于实现汽车内部各电子控制单元(ECU)之间的高效、可靠通信起着至关重要的作用。
本文旨在深入探讨汽车CAN总线网络控制系统的设计与实现,包括其基本原理、网络架构、关键技术以及实际应用等方面,以期为汽车控制系统的研发和优化提供有益的参考和借鉴。
文章首先将对汽车CAN总线网络控制系统的基本概念进行介绍,包括CAN总线的历史背景、技术特点以及在现代汽车中的应用场景。
随后,文章将详细阐述CAN总线网络控制系统的网络架构,包括其拓扑结构、通信协议、数据传输方式等方面,以便读者对该系统的整体框架有清晰的认识。
在此基础上,文章将重点探讨汽车CAN总线网络控制系统的关键技术,如CAN总线的通信协议、数据帧结构、错误检测与处理机制等。
还将对CAN总线网络控制系统的可靠性和实时性进行分析和研究,提出相应的优化策略和方法。
文章将通过实际案例分析,展示汽车CAN总线网络控制系统在实际应用中的表现和应用效果,总结其优势和不足,并展望未来的发展趋势和研究方向。
希望通过本文的介绍和分析,能够为读者提供全面而深入的汽车CAN总线网络控制系统知识,为汽车控制系统的研发和优化提供有益的启示和帮助。
二、CAN总线技术基础CAN(Controller Area Network)总线是一种用于实时应用的串行通讯协议,其设计初衷是为了满足汽车内部各个电子控制单元(ECU)之间的通讯需求。
CAN总线以其高可靠性、强大的错误处理能力和灵活的数据通讯方式,成为了现代汽车网络控制系统的核心。
CAN总线技术的基础在于其独特的通讯机制和协议规则。
CAN总线采用差分信号进行数据传输,通过两条信号线CAN_H和CAN_L之间的电压差来表示逻辑“0”和“1”。
基于CAN总线技术的汽车车灯电动车窗雨刮的控制系统方案

基于CAN 总线技术的汽车车灯、电动车窗、雨刮的控制系统简介随着现代汽车的迅猛发展和电子技术的日新月异,汽车电子设备不断增多,从发动机控制到传动系统控制,从行驶、制动、转向系统控制到安全保证系统及仪表报警系统,从电源管理到为提高舒适性而作的各种努力,使汽车综合控制系统越来越复杂。
目前.以微控制器为代表的汽车电子在整车电子系统中应用广泛,汽车控制正由机电控制系统转向以分布式网络为基础的智能化系统。
CAN 总线是一种支持分布式和实时控制的串行通信网络,以其高性能和高可靠性在自动控制领域广泛应用。
本设计主要针对基于CAN 总线的汽车电子系统的设计,包括汽车车灯和汽车车窗和汽车雨刮等控制系统的总体设计思想、方法和硬件设计,介绍如何实现用CAN 总线完成汽车控制系统的控制。
目录CAN 总线-------------------------------------------------------- 31.1 CAN 简介- ------------------------------------------------------------------------------ 31.2 CAN 总线协议的报文帧结构形式 ------------------------------------- 3CAN 总线在奥迪A6 汽车车灯上的应用------------------------------------- 42.1 灯光控制系统的网络硬件设计。
- -------------------------------------------------------- 52.2 MCU 的选择-------------------------------------------------- 62.3 CAN 通讯控制器------------------------------------------------ 62.4 CAN 总线收发器------------------------------------------------ 62.5 系统的软件设计------------------------------------------------- 72.6 CAN 控制初始化程序-------------------------------------------- 72.7 中央处理器程序设计--------------------------------------------- 82.8 车灯控制程序--------------------------------------------------- 11CAN 总线在奥迪A6 汽车电动车窗上的应用 --------------------------------- 153.1 -------------------------------------------------------------- 系统的总体设计15 3.2 -------------------------------------------------------------- 硬件接口电路设计153.3 -------------------------------------------------------------- 系统软件设计17 3.3.1 CAN 控制初始化 ------------------------------------- 173.3.2 节点发送/接收报文------------------------------------------------------------------------------------ --173.3.3 主控程序----- 183.4 电动车窗系统主要技术参数和功能--------------------------------------- 19CAN 总线在奥迪A6 汽车雨刮上的应用------------------------------------- 194.1 系统的总体设计-------------------------------------------------- 194.2 系统硬件电路设计----------------------------------------------- 204.2.1 雨量检测模块-------------------------------------------------- 204.2.2 开关控制模块------------------------------------------------- 214.2.3 ECU 和CAN 通信模块----------------------------------------- 214.2.4 输出驱动模块------------------------------------------------- 224.2.5 雨刮电动机--------------------------------------------------- 224.3 系统软件设计---------------------------------------------------- 24结语32CAN 总线1.1 CAN 简介CAN(ControllerAreaNewtork) 即控制器局域网,是一种先进的串行通信协议,属于现场总线范围。
基于CAN总线的汽车电子控制系统设计分析

基于CAN总线的汽车电子控制系统设计分析近年来,汽车电子控制系统的发展给我们的驾车体验带来了更多的便利和安全性。
其中,基于CAN总线架构的汽车电子控制系统已成为主流,更加高效和可靠。
本文将从CAN总线的优势和特点、汽车电子控制系统的设计要点以及系统的分析等多个方面来详细探讨CAN总线在汽车电子控制系统中的应用。
一、CAN总线的优势与特点CAN总线是一种高速、实时、多主体的通信总线,具有高度的可靠性、抗干扰性和高效性。
具体可从以下几个方面来分析:1. 高速通信CAN总线是一种高速的通信协议,其最高通信速率可达1Mbit/s。
在车辆控制系统中,需要快速准确地获取各种数据,同时各部件之间需要快速、高效的通信,CAN总线便成为了最佳选择。
2. 实时性在汽车电子控制系统中,许多电子设备需要在实时的条件下进行控制和通信。
CAN总线基于时间触发方式实现数据传输,因此网络响应速度快,具有良好的实时性。
3. 多主体通信在CAN总线中,不同的节点能够同时进行发送和接收数据,这也就意味着多个电子设备能够在同一时间内进行通信。
因此,在车辆控制系统中,多个节点之间能够同时进行数据的交换和共享。
二、汽车电子控制系统的设计要点车辆控制系统包括发动机、变速器、底盘、车身等多个方面。
系统的设计应遵循以下的要点:1. 设计合理的系统架构汽车电子控制系统是由多个电子设备组成的,这些设备之间需要高效地进行通信和控制。
因此,在系统设计的初期,需要根据车辆的特点和控制需求制定出合理的系统架构。
2. 选择合适的通信总线CAN总线在汽车电子控制系统中应用广泛,但在某些特殊情况下,还需要使用其他通信总线。
例如,在高速数据传输和实时响应方面,FlexRay数字总线是一种更好的选择。
3. 实现本地控制和远程控制在汽车电子控制系统中,除了需要进行本地的控制,还需要能够进行远程的控制。
远程控制主要通过无线网进行,因此,网络的稳定性和可靠性非常重要。
三、系统的分析汽车电子控制系统的分析,主要包括以下几个方面:1. 车辆诊断系统车辆诊断系统主要用于实时检测车辆的各个电子设备的运行情况,通过CAN总线将数据传输到中央处理器中,进行实时的分析和诊断。
项目3 新能源汽车CAN总线控制系统《新能源汽车总线控制技术》

(二)CAN协议与标准
1.CAN协议规范
:主要为远程数据请求以及数 据传输提供服务,确定LLC子层接收哪一个报文,为恢复管理和 过载通知提供手段。
:主要是传送规则,即控制帧结构、执行仲裁、 错误检测、出错标定、故障界定。
:在不同节点之间根据所有的电气属性进行位的实 际传输,同一网络的物理层对于所有的节点都是相同的。
CAN协议分层的报文包分为两部分:
。
• 头两个字节为信息部分,其中前11位为标识符,标识符
中的前8位用作接收判断,包含本信息包的目的站地址。
• 总线上的任意节点均可以作为发送器或接收器,其中发
8.仲裁
✓ 只要总线空闲,任何单元都可以开始发送报文,但具有较高优先权
报文的单元才可以获得
。
9. 错误检测
✓ 为了获得最安全的数据发送,CAN的每一个节点均采取了强有力的 措施以便于错误检测、错误标定及错误自检。
✓ 进行错误检测时,必须采取监视(发送器对发送位的电平与被监控
的总线电平进行比较)、循环冗余检查、位填充、报文格式检查、
整车系统结构示意图
(一)主控制器ECU
: (1)汽车驱动控制功能根据驾驶员的要求,以及相应的车辆运行状态、 工况,计算驱动转矩,控制电机驱动控制系统和发动机控制系统满足工况 要求。 2制动能量回馈控制根据制动踏板的开度、车辆行驶状态、电池管理 系 统的信息,确定制动模式和制动力矩。 3整车能量管理控制能量消耗,对蓄电池、辅助动力源和车载其他动 力 系统统一管理,提高整车能量利用率,增加续驶里程。
谢谢您的聆听
有三种过载的情况,这三种情况都会引发过载标志的传送: 1接收器的内部情况(接收器对于下一数据帧或远程帧需要有一个延 时 )。
基于CAN总线的电动汽车数字控制系统研究

O 引言电动汽车是集计算机技术、通信技术、电子技术、新材料技术等一体化的高科技产品,其结构复杂,有多种相互作用却又相对独立的部件,且车载环境较恶劣,有很强的干扰,用模拟量的控制可靠性不高。
先进高效的控制体系结构,可以使电动汽车各系统之间的数据交换满足简单迅速、可靠性高、抗干扰能力强、实时性好、系统错误检测和隔离能力强等要求。
本文采用了先进的计算机技术和CAN总线技术,集智能控制、信号采集、数据处理和通信于一体,控制实时性好,可实现整车控制智能化和多传感器信息的有效融合。
1 CAN总线的简介CAN(ControllerAreaNewtork)即控制器局域网,是一种先进的串行通信协议,属于现场总线范围。
CAN总线是最初由德国Bosch公司在80年代初期,为了解决现代汽车中众多的控制与测试一起之间的数据交换而开发的一种串行数据通信协议,目的是通过较少的信号线将汽车上的各种电子设备通过网络连接起来,并提高数据在网络中传输的可靠性,CA N总线具有较强纠错能力,支持差分收发,因而适合高噪声环境,并具有较远的传输距离,特别适合于中小型分布式测控系统,目前己在工业自动化、建筑物环境控制、机床、医疗设备等领域得到广泛应用。
CAN总线具有以下几个重要特点:1)结构简单,只有两根线与外部相连,且内部含有错误探测和管理模块。
2)通信方式灵活。
可以多种方式工作,网络上任意一个节点均可在任意时刻主动的向网络上的其他节点发送信息,而不分主从。
3)可以点对点、点对多点及全局广播方式发送和接受数据。
4)网络上的节点信息可分成不同的优先级,可以满足不同的实时要求。
5)CAN通讯格式采用短帧格式,每帧字节数最多为8个,可满足通常工业领域中控制命令、工作状态和测试数据的一般要求。
同时,8个字节也不会占用总线时间过长,从而保证了通讯的实时性。
6)采用非破坏性总线仲裁技术。
当两个节点同时向总线上发送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可以不受影响继续传输数据,这大大地节省了总线仲裁冲突时间,在网络负载很重的情况下也不会出现网络瘫痪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
书山有路勤为径;学海无涯苦作舟
基于CAN总线的电动汽车控制系统设计
一、前言
CAN总线是德国BOSCH公司在20世纪80年代初为解决汽车中众多
的控制与测试仪器之间的数据交换而开发的一种通信协议。
由于CAN总线具有突出的可*性、实时性和灵活性,因而得到了业界的广泛认同和运用,并在1993年正式成为国际标准和行业标准,被誉为“最有前途的现场总
线”之一。
以CAN为代表的总线技术在汽车上的应用不但减少了车身线束,也提高了汽车的可*性。
在国外现代轿车的设计中,CAN已经成为必须采用的技术,奔驰、宝马、大众、沃尔沃及雷诺等汽车都将CAN作为控制器联网的手段。
我国目前CAN总线技术在汽车上的应用存在着很大的空白,在电动汽车上应用CAN总线技术研究尚处于起步阶段。
电动汽车融合了许多的电子控制系统,如电池管理系统、电机控制
系统、驱动控制系统、再生制动系统及ABS系统等。
电子设备的大量应用,必然导致车身布线增长且复杂、运行可*性降低、线路上的功率损耗加大、故障维修难度增大。
特别是电子控制单元的大量引入,为了提高信号的利
用率,要求大批的数据信息能在不同的电子单元中共享,汽车综合控制系
统中大量的控制信号也需要实时交换,传统线束已远远不能满足这种需求。
将CAN总线技术引入电动汽车可以克服以上缺点,具有广阔的应用前景。
文中将CAN总线技术应用到电动汽车控制系统,并采用通用扩展单元解决电动汽车电控系统的电路设计复杂性的问题,优化组合各电控单元信息以
实现充分信息共享,达到提高电动汽车控制系统性能的目的。
专注下一代成长,为了孩子。