现代控制理论1-8三习题库
《现代控制理论》课后习题答案1.pdf

《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。
现代控制理论试题与答案
现代控制理论试题与答案现代控制理论1.经典-现代控制区别:经典控制理论中,对⼀个线性定常系统,可⽤常微分⽅程或传递函数加以描述,可将某个单变量作为输出,直接和输⼊联系起来;现代控制理论⽤状态空间法分析系统,系统的动态特性⽤状态变量构成的⼀阶微分⽅程组描述,不再局限于输⼊量,输出量,误差量,为提⾼系统性能提供了有⼒的⼯具.可以应⽤于⾮线性,时变系统,多输⼊-多输出系统以及随机过程.2.实现-描述由描述系统输⼊-输出动态关系的运动⽅程式或传递函数,建⽴系统的状态空间表达式,这样问题叫实现问题.实现是⾮唯⼀的.3.对偶原理系统=∑1(A1,B1,C1)和=∑2(A2,B2,C2)是互为对偶的两个系统,则∑1的能控性等价于∑2的能观性, ∑1的能观性等价于∑2的能控性.或者说,若∑1是状态完全能控的(完全能观的),则∑2是状态完全能观的(完全能控的).对偶系统的传递函数矩阵互为转置4.对线性定常系统∑0=(A,B,C),状态观测器存在的充要条件是的不能观⼦系统为渐近稳定第⼀章控制系统的状态空间表达式1.状态⽅程:由系统状态变量构成的⼀阶微分⽅程组2.输出⽅程:在指定系统输出的情况下,该输出与状态变量间的函数关系式3.状态空间表达式:状态⽅程和输出⽅程总合,构成对⼀个系统完整动态描述4.友矩阵:主对⾓线上⽅元素均为1:最后⼀⾏元素可取任意值;其余元素均为05.⾮奇异变换:x=Tz,z=T-1x;z=T-1A Tz+T-1Bu,y=CTz+Du.T为任意⾮奇异阵(变换矩阵),空间表达式⾮唯⼀6.同⼀系统,经⾮奇异变换后,特征值不变;特征多项式的系数为系统的不变量第⼆章控制系统状态空间表达式的解1.状态转移矩阵:eAt,记作Φ(t)2.线性定常⾮齐次⽅程的解:x(t)=Φ(t)x(0)+∫t0Φ(t-τ)Bu(τ)dτ第三章线性控制系统的能控能观性1.能控:使系统由某⼀初始状态x(t0),转移到指定的任⼀终端状态x(tf),称此状态是能控的.若系统的所有状态都是能控的,称系统是状态完全能控2.系统的能控性,取决于状态⽅程中系统矩阵A和控制矩阵b3.⼀般系统能控性充要条件:(1)在T-1B中对应于相同特征值的部分,它与每个约旦块最后⼀⾏相对应的⼀⾏元素没有全为0.(2)T-1B中对于互异特征值部分,它的各⾏元素没有全为0的4.在系统矩阵为约旦标准型的情况下,系统能观的充要条件是C中对应每个约旦块开头的⼀列的元素不全为05.约旦标准型对于状态转移矩阵的计算,可控可观性分析⽅便;状态反馈则化为能控标准型;状态观测器则化为能观标准型6.最⼩实现问题:根据给定传递函数阵求对应的状态空间表达式,其解⽆穷多,但其中维数最⼩的那个状态空间表达式是最常⽤的.第五章线性定常系统综合1.状态反馈:将系统的每⼀个状态变量乘以相应的反馈系数,然后反馈到输⼊端与参考输⼊相加形成控制律,作为受控系统的控制输⼊.K为r*n维状态反馈系数阵或状态反馈增益阵2.输出反馈:采⽤输出⽮量y构成线性反馈律H为输出反馈增益阵3.从输出到状态⽮量导数x的反馈:A+GC4.线性反馈:不增加新状态变量,系统开环与闭环同维,反馈增益阵都是常矩阵动态补偿器:引⼊⼀个动态⼦系统来改善系统性能5.(1)状态反馈不改变受控系统的能控性(2)输出反馈不改变受控系统的能控性和能观性6.极点配置问题:通过选择反馈增益阵,将闭环系统的极点恰好配置在根平⾯上所期望的位置,以获得所希望的动态性能 (1)采⽤状态反馈对系统任意配置极点的充要条件是∑0完全能控(2)对完全能控的单输⼊-单输出系统,通过带动态补偿器的输出反馈实现极点任意配置的充要条件[1]∑0完全能控[2]动态补偿器的阶数为n-1(3)对系统⽤从输出到x 线性反馈实现闭环极点任意配置充要条件是完全能观 7.传递函数没有零极点对消现象,能控能观8.对完全能控的单输⼊-单输出系统,不能采⽤输出线性反馈来实现闭环系统极点的任意配置9.系统镇定:保证稳定是控制系统正常⼯作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定 (1)对系统采⽤状态反馈能镇定的充要条件是其不能控⼦系统渐近稳定(2)对系统通过输出反馈能镇定的充要条件是其结构分解中的能控且能观⼦系统是输出反馈能镇定的,其余⼦系统是渐近稳定的(3)对系统采⽤输出到x 反馈实现镇定充要条件是其不能观⼦系统为渐近稳定10.解耦问题:寻求适当的控制规律,使输⼊输出相互关联的多变量系统的实现每个输出仅受相应的⼀个输⼊所控制,每个输⼊也仅能控制相应的⼀个输出11.系统解耦⽅法:前馈补偿器解耦和状态反馈解耦 12.全维观测器:维数和受控系统维数相同的观测器现代控制理论试题1 ①已知系统u u u y y 222++=+ ,试求其状态空间最⼩实现。
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
现代控制理论试题详细答案
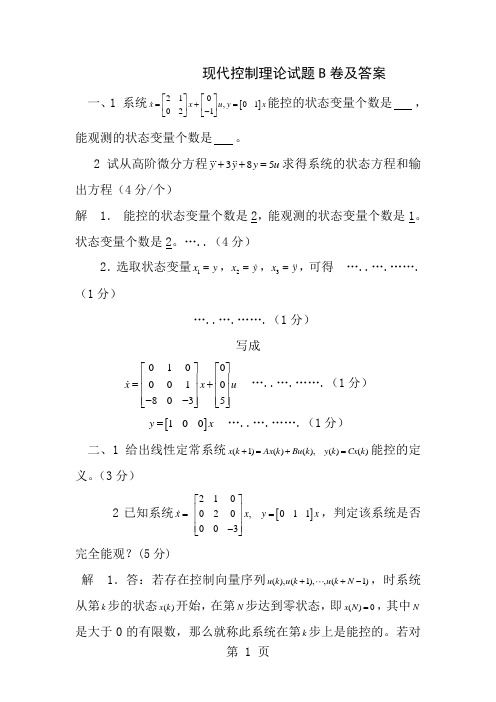
现代控制理论试题B 卷及答案一、1 系统[]210,01021x x u y x ⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦能控的状态变量个数是cvcvx ,能观测的状态变量个数是。
2试从高阶微分方程385y y y u ++=求得系统的状态方程和输出方程(4分/个)解 1. 能控的状态变量个数是2,能观测的状态变量个数是1。
状态变量个数是2。
…..(4分)2.选取状态变量1x y =,2x y =,3x y =,可得 …..….…….(1分)…..….…….(1分)写成010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦…..….…….(1分) []100y x = …..….…….(1分)二、1给出线性定常系统(1)()(),()()x k Ax k Bu k y k Cx k +=+=能控的定义。
(3分)2已知系统[]210 020,011003x x y x ⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦,判定该系统是否完全能观?(5分)解 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++-,时系统从第k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于0的有限数,那么就称此系统在第k 步上是能控的。
若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。
…..….…….(3分) 2.[][]320300020012 110-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=CA ………..……….(1分)[][]940300020012 3202=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=CA ……..……….(1分)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=940320110 2CA CA C U O ………………..……….(1分)rank 2O U n =<,所以该系统不完全能观……..….…….(2分)三、已知系统1、2的传递函数分别为 求两系统串联后系统的最小实现。
现代控制理论习题解答(第一章)

g
题 1-3 图 2
Y2 (s)
3
U (s)
K1
x6
x6
T1 1
T1
K2
x4
x4
T2 1
K3 x2
x2 1 T4
T2
x3
x3
x5
x5
K5
T5
1 T5
写成矩阵的形式得:
题 1-3 图 3
x 1
=− 1 T4
x1
+
1 T4
x2
x2 = K 3 (x4 − x3 )
x3 = x2
x 4
1⎤
R 2 C1 −1
R2C2
⎥ ⎥ ⎥
⎡ ⎢ ⎣
x1 x2
⎥⎦
⎤ ⎥ ⎦
+
⎡ ⎢ ⎢ ⎣
1
R1C1 0
⎤ ⎥⎥u i ⎦
y = u0 = [0
1]⎢⎡
⎣
x1 x2
⎤ ⎥ ⎦
(2)
设状态变量: x1 = iL 、 x2 = uc 而
1
根据基尔霍夫定律得: 整理得
•
iL = C uc
•
ui = R ⋅ iL + LiL + uc
(4) G(s)
=
s3
s2 + 2s + 3 + 3s 2 + 3s + 1
【解】: 此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)
⎡0 1
x
=
⎢ ⎢
0
0
⎢⎣− 6 −11
y = [1 1 1]x
0 ⎤ ⎡0⎤
1
⎥ ⎥
x
《现代控制理论》第3版课后习题答案
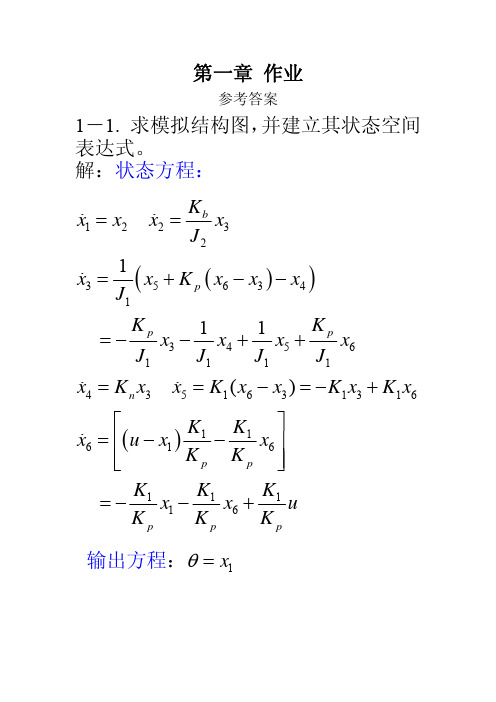
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》课后习题全部答案(最完整打印版)

第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论试题与答案
现代控制理论1.经典-现代控制区别:经典控制理论中,对一个线性定常系统,可用常微分方程或传递函数加以描述,可将某个单变量作为输出,直接和输入联系起来;现代控制理论用状态空间法分析系统,系统的动态特性用状态变量构成的一阶微分方程组描述,不再局限于输入量,输出量,误差量,为提高系统性能提供了有力的工具.可以应用于非线性,时变系统,多输入-多输出系统以及随机过程.2.实现-描述由描述系统输入-输出动态关系的运动方程式或传递函数,建立系统的状态空间表达式,这样问题叫实现问题.实现是非唯一的.3.对偶原理系统=∑1A1,B1,C1和=∑2A2,B2,C2是互为对偶的两个系统,则∑1的能控性等价于∑2的能观性, ∑1的能观性等价于∑2的能控性.或者说,若∑1是状态完全能控的完全能观的,则∑2是状态完全能观的完全能控的.对偶系统的传递函数矩阵互为转置4.对线性定常系统∑0=A,B,C,状态观测器存在的充要条件是的不能观子系统为渐近稳定第一章控制系统的状态空间表达式1.状态方程:由系统状态变量构成的一阶微分方程组2.输出方程:在指定系统输出的情况下,该输出与状态变量间的函数关系式3.状态空间表达式:状态方程和输出方程总合,构成对一个系统完整动态描述4.友矩阵:主对角线上方元素均为1:最后一行元素可取任意值;其余元素均为05.非奇异变换:x=Tz,z=T-1x;z=T-1ATz+T-1Bu,y=CTz+为任意非奇异阵变换矩阵,空间表达式非唯一6.同一系统,经非奇异变换后,特征值不变;特征多项式的系数为系统的不变量第二章控制系统状态空间表达式的解1.状态转移矩阵:eAt,记作Φt2.线性定常非齐次方程的解:xt=Φtx0+∫t0Φt-τBuτdτ第三章线性控制系统的能控能观性1.能控:使系统由某一初始状态xt0,转移到指定的任一终端状态xtf,称此状态是能控的.若系统的所有状态都是能控的,称系统是状态完全能控2.系统的能控性,取决于状态方程中系统矩阵A和控制矩阵b3.一般系统能控性充要条件:1在T-1B中对应于相同特征值的部分,它与每个约旦块最后一行相对应的一行元素没有全为0.2T-1B中对于互异特征值部分,它的各行元素没有全为0的4.在系统矩阵为约旦标准型的情况下,系统能观的充要条件是C中对应每个约旦块开头的一列的元素不全为05.约旦标准型对于状态转移矩阵的计算,可控可观性分析方便;状态反馈则化为能控标准型;状态观测器则化为能观标准型6.最小实现问题:根据给定传递函数阵求对应的状态空间表达式,其解无穷多,但其中维数最小的那个状态空间表达式是最常用的.第五章线性定常系统综合1.状态反馈:将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入.K为rn维状态反馈系数阵或状态反馈增益阵2.输出反馈:采用输出矢量y构成线性反馈律H为输出反馈增益阵3.从输出到状态矢量导数x的反馈:A+GC4.线性反馈:不增加新状态变量,系统开环与闭环同维,反馈增益阵都是常矩阵动态补偿器:引入一个动态子系统来改善系统性能5.1状态反馈不改变受控系统的能控性2输出反馈不改变受控系统的能控性和能观性6.极点配置问题:通过选择反馈增益阵,将闭环系统的极点恰好配置在根平面上所期望的位置,以获得所希望的动态性能1采用状态反馈对系统任意配置极点的充要条件是∑0完全能控2对完全能控的单输入-单输出系统,通过带动态补偿器的输出反馈实现极点任意配置的充要条件1∑0完全能控2动态补偿器的阶数为n-13对系统用从输出到x线性反馈实现闭环极点任意配置充要条件是完全能观7.传递函数没有零极点对消现象,能控能观8.对完全能控的单输入-单输出系统,不能采用输出线性反馈来实现闭环系统极点的任意配置9.系统镇定:保证稳定是控制系统正常工作的必要前提,对受控系统通过反馈使其极点均具有负实部,保证系统渐近稳定1对系统采用状态反馈能镇定的充要条件是其不能控子系统渐近稳定2对系统通过输出反馈能镇定的充要条件是其结构分解中的能控且能观子系统是输出反馈能镇定的,其余子系统是渐近稳定的3对系统采用输出到x反馈实现镇定充要条件是其不能观子系统为渐近稳定10.解耦问题:寻求适当的控制规律,使输入输出相互关联的多变量系统的实现每个输出仅受相应的一个输入所控制,每个输入也仅能控制相应的一个输出 11.系统解耦方法:前馈补偿器解耦和状态反馈解耦 12.全维观测器:维数和受控系统维数相同的观测器现代控制理论试题1 ①已知系统u u uy y 222++=+ ,试求其状态空间最小实现;5分 ②设系统的状态方程及输出方程为11000101;0111x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y x =试判定系统的能控性;5分2 已知系统的状态空间表达式为00001⎛⎫⎡⎤=+ ⎪⎢⎥⎝⎭⎣⎦x x u t ;[]x y 01=; ⎥⎦⎤⎢⎣⎡=11)0(x 试求当0;≥=t t u 时,系统的输出)(t y ;10分 3给定系统的状态空间表达式为u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=100100110100013 ,211021y x -⎡⎤=⎢⎥⎣⎦ 试确定该系统能否状态反馈解耦,若能,则将其解耦10分 4 给定系统的状态空间表达式为设计一个具有特征值为 1 1 1---,,的全维状态观测器10分 5 ①已知非线性系统 ⎩⎨⎧--=+-=2112211sin 2x a x xx x x试求系统的平衡点,并确定出可以保证系统大范围渐近稳定的1a 的范围;5分② 判定系统11221223x x x x x x =-+⎧⎨=--⎩在原点的稳定性;5分6 已知系统 u x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=110011 试将其化为能控标准型;10分 7 已知子系统1∑ 111121011x x u -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦,[]1110y x = 求出串联后系统现代控制理论试题1 ① 取拉氏变换知 )()2()()22(33s u s s s y s ++=+21121)1(21)(2213++-=+++=s s s s s g 3分其状态空间最小实现为u x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=101110 ; 21021+⎥⎦⎤⎢⎣⎡=x y 2分② 1n c u B ABA B -⎡⎤=⎣⎦012111101⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦,秩为2,系统状态不完全能控; 2 解 02210(,)0.50.51⎛⎫Φ= ⎪-⎝⎭t t t t , 0()(,0)(0)(,)()tx t t x t B d τττ=Φ+Φ⎰ 1y = 3解 [][]100211101101c B ⎡⎤⎢⎥=-=-⎢⎥⎢⎥⎣⎦, [][]200021102101c B ⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦所以120d d ==,121121E E E -⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦; 1111213--⎡⎤=⎢⎥⎣⎦E 又因为E 非奇异,所以能用实现解耦控制; 2分12630011c A F c A ⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦1分 求出u kx Lv =-+4 解 令122E E E E ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦, 代入系统得()123120()011100101sE sI A EC sE s E --⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪--=---⎪ ⎪ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭理想特征多项式为*332()(1)331f x s s s s =-=+++ 列方程,比较系数求得 001E ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 全维状态观测器为[]ˆˆx A EC x Bu Ey =-++ 12020ˆ01100,00111x u y --⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦5 解 ①显然原点为一个平衡点,根据克拉索夫斯基方法,可知 因为 02<-;所以,当0)cos 21(42cos 21cos 212211111>--=----x a a x x时,该系统在原点大范围渐近稳定;解上述不等式知,491>a 时,不等式恒成立; 即491>a 时,系统在原点大范围渐近稳定; ② 解 2114523I A λλλλλ+--==+++,两个特征根均具有负实部,系统大范围一致渐近稳定;2分6 解 1210c u ⎡⎤=⎢⎥⎣⎦,1112201c u -⎡⎤=⎢⎥-⎣⎦ [][][]1111221122010101c p u -⎡⎤===-⎢⎥-⎣⎦[][]11112122221100p p A ⎡⎤==-=⎢⎥⎣⎦11221112211,11P P --⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦能控标准型为u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=101010 7 解 组合系统状态空间表达式为[]1200101001,00010011010010x x u y x -⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=+=⎢⎥⎢⎥-⎢⎥⎢⎥-⎣⎦⎣⎦5分组合系统传递函数为21()()()G s G s G s = 2分21331(1)(1)(1)(1)s s s s s s s ++=⨯=+-+-+ 3分。
现代控制理论1-8三习题库
复习题
1.现代控制理论研究的主要内容是什么? 2.现代控制理论研究对象? 3.现代控制理论所使用的数学工具有哪些? 4.现代控制理论问题的解决方法是什么?
练习题 1.控制一个动态系统的几个基本步骤是什么?
第二章(单元): 控制系统的状态空间表达式
本章节(单元)教学目标: 正确理解线性系统的数学描述,状态空间的基本概念,熟练掌握状态空间的表达式,线
3 均为标量。
d
u
3
2
1
+
y
+
x3 1/s x3 +
1/s
x2
x2
+ x1
1/s x1
a3
a2
a1
7. 试求图中所示的电网络中,以电感 L1 、L2 上的支电流 x1 、 x2 作为状态
变量的状态空间表达式。这里 u 是恒流源的电流值,输出 y 是 R3 上的
支路电压。
8. 已知系统的微分方程 y y 4y 5y 3u ,试列写出状态空间表达式。
复习题 练习题
2. 若已知系统的模拟结构图,如何建立其状态空间表达式? 3. 求下列矩阵的特征矢量
1 -1 0
A
2
0 2
10 5 2
4. (判断)状态变量的选取具有非惟一性。 5. (判断)系统状态变量的个数不是惟一的,可任意选取。 6. (判断)通过适当选择状态变量,可将线性定常微分方程描述其输入输
G(s) 3s 4 s(s 1)(s 3)
40. 已知系统的传递函数,试列写出状态空间表达式,并画出状态变量图。
G(s) s 2 2s 3 s3 1
41. 已知系统的传递函数,试列写出状态空间表达式,并画出状态变量图。
现代控制理论经典习题
第一周绪论1、我国人民哪些发明属于在经典控制理论萌芽阶段的发明?(AB)A指南车B水运仪象台C指南针D印刷术2、经典控制理论也可以称为(BD)A现代控制理论B自动控制理论C近代控制理论D古典控制理论3、以下哪些内容属于现代控制理论基础的内容?(AB)A李雅普诺夫稳定性理论B极小值原理C频率响应法D根轨迹法4、传递函数模型假设模型初值不为零。
(X)5、传递函数描述的是单输入单输出的外部描述模型。
(X)6、线性系统理论属于现代控制理论的知识体系中数学模型部分。
(,)7、最优控制理论属于现代控制理论的知识体系中估计方法部分。
(X)8、控制科学的意义下,现代控制理论主要研究(数学建模)和(控制理论方法)的科学问题。
9、现代控制理论在整个控制理论发展中起到了(承上启下)的作用。
10、除了稳定性外,现代控制理论基础还考虑系统(能控性)和(能观测性)两个内部特性。
一、现代控制理论作为一门科学技术,已经得到了广泛的运用。
你还知道现代控制理论具体应用到哪些具体实际的例子么?第二周状态空间描述下的动态方程1、关于输出方程,下列哪些说法是正确的?(BD)A输出方程中状态变量必须是一阶的B输出方程中不含输入的任何阶倒数C输出方程中输入变量可以是任意阶的D输出方程中不含状态变量的任何阶倒数2、关于系统的动态方程,下列哪些说法是正确的?(AB)A系统的状态方程的状态变量的个数是惟一的B系统输出方程的输入输出变量是惟一的C系统输出方程的输入输出变量是不惟一的D系统的状态方程的状态变量是惟一的3、对于一个有多个动态方程表示的系统,下列说法正确的是?(AC)A这些动态方程一定是等价的B这些动态方程经过线性变化后,不能转化为一个动态方程C这些动态方程经过线性变化后,可以转化为一个动态方程D这些动态方程不一定是等价的4、选取的状态向量是线性相关的(X)5、状态向量的选取是不唯一的(/)6、状态向量的个数是不唯一的(X)7、输出方程的选取是不唯一的(/)8、(系统的输出量与状态变量、输入变量关系的数学表达式)称为输出方程。
现代控制理论基础题库(带答案)

现代控制理论基础题库1、已知某系统的传递函数为:,以下状态空间描述正确的是(C)2、控制理论的发展阶段为(A)。
A、经典控制理论、现代控制理论和鲁棒控制理论B、经典控制理论、现代控制理论C、经典控制理论、鲁棒控制理论D、现代控制理论3、下面关于线性定常系统的非奇异线性变换说法错误的是(C)A、对于线性定常系统,非奇异线性变换不改变系统的传递函数矩阵B、对于线性定常系统,非奇异线性变换不改变系统的特征多项式C、对于线性定常系统,非奇异线性变换不改变系统的状态空间描述D、对于线性定常系统,非奇异线性变换不改变系统的特征值4、状态方程是什么方程(B)A、高阶微分方程B、一阶微分方程C、代数方程D、高阶差分方程5、现代控制理论在整个控制理论发展中起到了什么作用?AA、承上启下B、总结C、开拓D、引领6、能完全描述系统动态行为的数学模型是(B)A、差分方程B、状态空间表达式C、微分方程D、传递函数7、输出方程是(C)A、一阶微分方程B、高阶微分方程C、代数方程D、高阶差分方程8、若某一系统的状态空间描述为:(单选)则与其对应的传递函数为(B)9、以下叙述错误的是(C)A、系统的状态空间模型包括状态方程和输出方程B、状态空间模型不仅可以描述时不变系统,还可以描述时变系统C、一个给定的系统只存在一组动态方程D、状态空间模型存在多种等效的标准型10、以下叙述正确的是(A)A、状态空间模型(A,B,C)的极点等于矩阵A的特征根B、状态空间模型中,系统的输出是由微分方程决定的C、如果系统存在多个状态,则系统可建立对角矩阵形式的状态空间模型D、给定系统的状态微分方程,总能够求出状态的数学表达式。
11、某弹簧-质量-阻尼器机械位移系统如下图所示,图中,K为弹簧的弹性系数,M为质量块的质量,f为阻尼器的阻尼系数,y为质量块M的位移,也是系统的输出量。
为建立其状态空间表达式,以下状态变量的选择方式正确的是(D)(单选)12、某单输入-单输出系统的状态空间模型为(D)则该系统的极点为:A、1,3B、-1,3C、1,-3D、-1,-313、线性定常系统的状态解析表达式中包含ABCA、初始状态B、状态转移矩阵C、输入D、过去时刻的状态14、现代控制理论已经应用在哪些领域ABCDA、倒立摆稳定控制B、工业领域C、航天航空领域D、机器人控制15、哪些内容是现代控制理论的知识体系?ABCDA、系统辨识B、线性系统C、最优估计D、最优控制16、以下哪些条件下,状态变量可以描述系统的未来响应:ABDA、给定当前状态B、给定输入C、给定输出D、给定动态方程17、状态方程是唯一的(错)18、系统状态空间模型中的状态变量可能没有实际物理意义(对)19、具有互不相同的极点的系统总能够化成对角线标准型(对)20、时变控制系统是指一个或多个系统参数会随时间变化的系统。
现代控制理论第版课后习题答案
现代控制理论参考答案第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式; 解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示;以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程; 解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵;解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图; 解:令..3.21y x y x y x ===,,,则有 相应的模拟结构图如下: 1-6 2已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:2⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量3⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P 1-9将下列状态空间表达式化成约旦标准型并联分解2⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P 当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1s 和W 2s试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:1串联联结 2并联联结1-11 第3版教材已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-11第2版教材 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b 即控制列阵为 1⎥⎦⎤⎢⎣⎡=11b 解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e ;2 A=1141⎛⎫⎪⎝⎭解:第一种方法: 令0I A λ-=则11041λλ--=-- ,即()2140λ--=;求解得到13λ=,21λ=- 当13λ=时,特征矢量11121p p p ⎡⎤=⎢⎥⎣⎦由 111Ap p λ=,得11112121311341p p p p ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦即112111112121343p p p p p p +=⎧⎨+=⎩,可令112p ⎡⎤=⎢⎥⎣⎦当21λ=-时,特征矢量12222p p p ⎡⎤=⎢⎥⎣⎦由222Ap p λ=,得121222221141p p p p -⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦即1222121222224p p p p p p +=-⎧⎨+=-⎩ ,可令212p ⎡⎤=⎢⎥-⎣⎦则1122T ⎡⎤=⎢⎥-⎣⎦,111241124T -⎡⎤⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦第二种方法,即拉氏反变换法:第三种方法,即凯莱—哈密顿定理 由第一种方法可知13λ=,21λ=-2-5 下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A 阵;3()22222222t tt t ttt t e e e e t e e e e --------⎡⎤--Φ=⎢⎥--⎣⎦ 4()()()()3333112412t t t t t tt t e e e e t e e e e ----⎡⎤+-+⎢⎥Φ=⎢⎥⎢⎥-++⎢⎥⎣⎦解:3因为 ()10001I ⎡⎤Φ==⎢⎥⎣⎦,所以该矩阵满足状态转移矩阵的条件 4因为()10001I ⎡⎤Φ==⎢⎥⎣⎦,所以该矩阵满足状态转移矩阵的条件2-6 求下列状态空间表达式的解:初始状态()101x ⎡⎤=⎢⎥⎣⎦,输入()u t 时单位阶跃函数;解: 0100A ⎡⎤=⎢⎥⎣⎦ 因为 01B ⎡⎤=⎢⎥⎣⎦,()()u t I t =2-9 有系统如图所示,试求离散化的状态空间表达式;设采样周期分别为T=和1s,而1u 和2u 为分段常数; 图 系统结构图 解:将此图化成模拟结构图 列出状态方程则离散时间状态空间表达式为 由()At G T e =和()0TAt H T e dtB =⎰得:当T=1时 ()()()()11111001111k e e x k x k u k e ke ----⎡⎤-⎡⎤+=+⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦当T=时 ()()()()()0.10.10.10.11001110.90.1k e e x k x k u k e k e ----⎡⎤-⎡⎤⎢⎥+=+⎢⎥⎢⎥---⎣⎦⎣⎦第三章习题3-1判断下列系统的状态能控性和能观测性;系统中a,b,c,d 的取值对能控性和能观性是否有关,若有关,其取值条件如何 1系统如图所示: 解:由图可得: 状态空间表达式为:由于•2x 、•3x 、•4x 与u 无关,因而状态不能完全能控,为不能控系统;由于y 只与3x 有关,因而系统为不完全能观的,为不能观系统; 3系统如下式:解:如状态方程与输出方程所示,A 为约旦标准形;要使系统能控,控制矩阵b 中相对于约旦块的最后一行元素不能为0,故有0,0≠≠b a ;要使系统能观,则C 中对应于约旦块的第一列元素不全为0,故有0,0≠≠d c ; 3-2时不变系统试用两种方法判别其能控性和能观性; 解:方法一:方法二:将系统化为约旦标准形;⎥⎦⎤⎢⎣⎡=1-111T ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=21212121T 1- B T -1中有全为零的行,系统不可控;CT 中没有全为0的列,系统可观; 3-3确定使下列系统为状态完全能控和状态完全能观的待定常数i i βα和 解:构造能控阵:要使系统完全能控,则211αα≠+,即0121≠+-αα 构造能观阵:要使系统完全能观,则121αα-≠-,即0121≠+-αα 3-4设系统的传递函数是1当a 取何值时,系统将是不完全能控或不完全能观的 2当a 取上述值时,求使系统的完全能控的状态空间表达式; 3当a 取上述值时,求使系统的完全能观的状态空间表达式; 解:1 方法1 :)6)(3)(1()()()(++++==s s s as s u s y s W 系统能控且能观的条件为Ws 没有零极点对消;因此当a=1,或a=3或a=6时,系统为不能控或不能观; 方法2:系统能控且能观的条件为矩阵C 不存在全为0的列;因此当a=1,或a=3或a=6时,系统为不能控或不能观;2当a=1, a=3或a=6时,系统可化为能控标准I 型3根据对偶原理,当a=1, a=2或a=4时,系统的能观标准II 型为 3-6已知系统的微分方程为:u y y y y 66116...=+++试写出其对偶系统的状态空间表达式及其传递函数; 解:63611603210=====b a a a a ,,,,系统的状态空间表达式为 传递函数为其对偶系统的状态空间表达式为: 传递函数为61166)(23+--=s s s s W 3-9已知系统的传递函数为 试求其能控标准型和能观标准型;解:345213486)(222++++=++++=s s s s s s s s W系统的能控标准I 型为 能观标准II 型为3-10给定下列状态空间方程,试判别其是否变换为能控和能观标准型;解:[]100210311032010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=C b A ,, 3-11试将下列系统按能控性进行分解1[]111,100,340010121-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=C b A 解:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--==9310004102b A Ab bM rankM=2<3,系统不是完全能控的; 构造奇异变换阵c R :⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==010*********R Ab R b R ,,,其中3R 是任意的,只要满足c R 满秩;即⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=031100010c R 得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-010*******c R 3-12 试将下列系统按能观性进行结构分解1 []111,100,340010121-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=C b A 解: 由已知得[]111,100,340010121-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=C b A 则有⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=4742321112CA CA C Nrank N=2<3,该系统不能观构造非奇异变换矩阵10R -,有10111232001R --⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦ 则0311210001R --⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦3-13 试将下列系统按能控性和能观性进行结构分解1[]211,221,102322001=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=C b A 解:由已知得211121226202M A Ab Ab ⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦rank M=3,则系统能控 rank N=3,则系统能观所以此系统为能控并且能观系统取211121226202c T ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦,则1217344173215344c T -⎡⎤-⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦则002105014A ⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦,12100c B T b -⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦,[]271323c c cT == 3-14求下列传递函数阵的最小实现; 1 ()111111w s s ⎡⎤=⎢⎥+⎣⎦解: 01α=,01111B ⎡⎤=⎢⎥⎣⎦,1001c A -⎡⎤=⎢⎥-⎣⎦ 1001c B ⎡⎤=⎢⎥⎣⎦,1111c C ⎡⎤=⎢⎥⎣⎦,0000c D ⎡⎤=⎢⎥⎣⎦ 系统能控不能观取101101R -⎡⎤=⎢⎥⎣⎦,则01101R -⎡⎤=⎢⎥⎣⎦所以10010ˆ01A R AR --⎡⎤==⎢⎥-⎣⎦,1011ˆ01c B R B -⎡⎤==⎢⎥⎣⎦ 010ˆ10c C C R ⎡⎤==⎢⎥⎣⎦,00ˆ00D ⎡⎤=⎢⎥⎣⎦所以最小实现为ˆ1m A =,[]ˆ11m B =,1ˆ1m C ⎡⎤=⎢⎥⎣⎦,00ˆ00m D ⎡⎤=⎢⎥⎣⎦ 验证:()()1111ˆˆˆ111m mm C sI A B w s s -⎡⎤-==⎢⎥+⎣⎦3-15设1∑和2∑是两个能控且能观的系统1试分析由1∑和2∑所组成的串联系统的能控性和能观性,并写出其传递函数; 2试分析由1∑和2∑所组成的并联系统的能控性和能观性,并写出其传递函数; 解: 11∑和2∑串联当1∑的输出1y 是2∑的输入2u 时,331222x x x x =-++010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=--+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]001y x = 则rank M=2<3,所以系统不完全能控; 当2∑得输出2y 是1∑的输入1u 时011034100021x x u ⎡⎤⎡⎤⎢⎥⎢⎥=--+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]210y x = 因为 2001016124M bAbA b ⎡⎤⎢⎥⎡⎤==-⎣⎦⎢⎥⎢⎥--⎣⎦rank M=3 则系统能控因为2210321654c N cA cA ⎡⎤⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦rank N=2<3 则系统不能观 21∑和2∑并联010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=--+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]211y x = 因为rank M=3,所以系统完全能控 因为rank N=3,所以系统完全能观现代控制理论第四章习题答案4-1判断下列二次型函数的符号性质:1222123122313()31122Q x x x x x x x x x x =---+-- 2222123122313()4262v x x x x x x x x x x =++--- 解:1由已知得110∆=-<,2112013-∆==>-,31111711302411112--∆=--=-<--- 因此()Q x 是负定的 2由已知得110∆=>,2113014-∆==>-,3111143160131--∆=--=-<--因此()Q x 不是正定的 4-2已知二阶系统的状态方程:试确定系统在平衡状态处大范围渐进稳定的条件;解:方法1:要使系统在平衡状态处大范围渐进稳定,则要求满足A 的特征值均具有负实部;即:有解,且解具有负实部; 即:1122112212210a a a a a a +<>且方法2:系统的原点平衡状态0e x =为大范围渐近稳定,等价于T A P PA Q +=-;取Q I =,令11121222PP P P P ⎡⎤=⎢⎥⎣⎦,则带入TA P PA Q +=-,得到 若 11211211222111221122122112222204()()0022a a a a a a a a a a a a a a +=+-≠,则此方程组有唯一解;即 其中11221221det A A a a a a ==- 要求P 正定,则要求 因此11220a a +<,且det 0A >4-3试用lyapunov 第二法确定下列系统原点的稳定性;11123x x -⎡⎤=⎢⎥-⎣⎦ 21111x x -⎡⎤=⎢⎥--⎣⎦解:1系统唯一的平衡状态是0e x =;选取Lyapunov 函数为2212()0V x x x =+>,则 ()V x •是负定的;x →∞,有()V x →∞;即系统在原点处大范围渐近稳定;2系统唯一的平衡状态是0e x =;选取Lyapunov 函数为2212()0V x x x =+>,则 ()V x •是负定的;x →∞,有()V x →∞;即系统在原点处大范围渐近稳定;4-6设非线性系统状态方程为: 试确定平衡状态的稳定性;解:若采用克拉索夫斯基法,则依题意有: 取P I =很明显,()Q x 的符号无法确定,故改用李雅普诺夫第二法;选取Lyapunov 函数为2212()0V x x x =+>,则()V x •是负定的;x →∞,有()V x →∞;即系统在原点处大范围渐近稳定;4-9设非线性方程:试用克拉索夫斯基法确定系统原点的稳定性; 解:1采用克拉索夫斯基法,依题意有:x →∞,有()V x →∞; 取P I =则2121013()132x Q x x ⎡⎤-+=⎢⎥-+⎣⎦,根据希尔维斯特判据,有: 2221121210310310132x x x -∆=∆==->-+,(),()Q x 的符号无法判断; 2李雅普诺夫方法:选取Lyapunov 函数为421233()042V x x x =+>,则 ()V x •是负定的;x →∞,有()V x →∞;即系统在原点处大范围渐近稳定;4-12试用变量梯度法构造下列系统的李雅普诺夫函数 解:假设()V x 的梯度为: 计算()V x 的导数为:选择参数,试选112212211,0a a a a ====,于是得:12x V x ⎛⎫∇= ⎪⎝⎭,显然满足旋度方程12122121,0V V x xx x x x ∂∇∂∇∂∂===∂∂∂∂即,表明上述选择的参数是允许的;则有:如果121211202x x x x -><或,则()V x •是负定的,因此,1212x x <是12x x 和的约束条件; 计算得到()V x 为:()V x 是正定的,因此在121211202x x x x -><即范围内,0e x =是渐进稳定的;现代控制理论第五章习题答案5-1已知系统状态方程为:试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3; 解:依题意有:2011012112M bAbA b ⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥⎣⎦3rankM =,系统能控; 系统0(,,)A b C =∑的特征多项式为:则将系统写成能控标准I 型,则有010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦; 引入状态反馈后,系统的状态方程为:()x A bK x bu =++,其中3K ⨯为1矩阵,设[]012K k k k =,则系统(,,)K A bK C =∑的特征多项式为:根据给定的极点值,得到期望特征多项式为:比较*()()f f λλ与各对应项系数,可解得:012599k k k =-=-=-,则有:[]-5-9-9K =;5-3有系统:(1) 画出模拟结构图;(2) 若动态性能不满足要求,可否任意配置极点 (3) 若指定极点为-3,-3,求状态反馈阵; 解1系统模拟结构图如下:2系统采用状态反馈任意配置极点的充要条件是系统0(,,)A b C =∑完全能控; 对于系统0(,,)A b C =∑有: []0111M bAb ⎡⎤==⎢⎥-⎣⎦2rankM =,系统能控,故若系统动态性能不满足要求,可任意配置极点;3系统0(,,)A b C =∑的特征多项式为:则将系统写成能控标准I 型,则有010231x x u ⎡⎤⎡⎤=+⎢⎥⎢⎥--⎣⎦⎣⎦; 引入状态反馈后,系统的状态方程为:()x A bK x bu =++,设[]01K k k =,则系统(,,)KA bK C =∑的特征多项式为:根据给定的极点值,得到期望特征多项式为:比较*()()f f λλ与各对应项系数,可解得:[]017373k k K =-=-=--,; 5-4设系统传递函数为试问能否利用状态反馈将传递函数变成 若有可能,试求出状态反馈K ,并画出系统结构图;解:6522)3)(2)(1()2)(1()(232--+-+=+-++-=s s s s s s s s s s s W由于传递函数无零极点对消,因此系统为能控且能观; 能控标准I 型为 令[] 210k k k K =为状态反馈阵,则闭环系统的特征多项式为由于状态反馈不改变系统的零点,根据题意,配置极点应为-2,-2,-3,得期望特征多项式为比较 )(λf 与 )(*λf 的对应项系数,可得 即[]52118---=K 系统结构图如下:5-5使判断下列系统通过状态反馈能否镇定;11222 A 011,01011b ---⎡⎤⎡⎤⎢⎥⎢⎥=-=⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦解:系统的能控阵为:2240010115M bAbA b -⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦3rankM =,系统能控; 由定理 5.2.1可知,采用状态反馈对系统0(,,)A b C =∑任意配置极点的充要条件是(,,)A b C =∑完全能控;又由于3rankM =,系统0(,,)A b C =∑能控,可以采用状态反馈将系统的极点配置在根平面的左侧,使闭环系统镇定; 5-7设计一个前馈补偿器,使系统 解耦,且解耦后的极点为1,1,2,2----; 解:0()()() d W s W s W s = 5-10已知系统:试设计一个状态观测器,使观测器的极点为-r,-2rr>0;解:因为1001c N cA ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦满秩,系统能观,可构造观测器; 系统特征多项式为[]21det det 0I A λλλλ-⎡⎤-==⎢⎥⎣⎦,所以有10010,0,10a a L ⎡⎤===⎢⎥⎣⎦ 于是11001100x T ATx T bu x u --⎡⎤⎡⎤=+=+⎢⎥⎢⎥⎣⎦⎣⎦ 引入反馈阵12g G g ⎡⎤=⎢⎥⎣⎦,使得观测器特征多项式:根据期望极点得期望特征式:比较()f λ与()*f λ各项系数得:即223r G r ⎡⎤=⎢⎥⎣⎦,反变换到x 状态下2201321023r r G TG r r ⎡⎤⎡⎤⎡⎤===⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ 观测器方程为:。
现代控制理论1-8三习题库

现代控制理论1-8三习题库信息工程学院现代控制理论课程习题清单正确理解线性系统的数学描述,状态空间的基本概念,熟练掌握状态空间的表达式,线性变换,线性定常系统状态方程的求解方法。
重点容:状态空间表达式的建立,状态转移矩阵和状态方程的求解,线性变换的基本性质,传递函数矩阵的定义。
要求熟练掌握通过传递函数、微分方程和结构图建立电路、机电系统的状态空间表达式,并画出状态变量图,以及能控、能观、对角和约当标准型。
难点:状态变量选取的非唯一性,多输入多输出状态空间表达式的建立。
预习题1.现代控制理论中的状态空间模型与经典控制理论中的传递函数有何区别?2.状态、状态空间的概念?3.状态方程规形式有何特点?4.状态变量和状态矢量的定义?5.怎样建立状态空间模型?6.怎样从状态空间表达式求传递函数?复习题1.怎样写出SISO系统状态空间表达式对应的传递函数阵表达式2.若已知系统的模拟结构图,如何建立其状态空间表达式?3.求下列矩阵的特征矢量--=2510221-1A4.(判断)状态变量的选取具有非惟一性。
5.(判断)系统状态变量的个数不是惟一的,可任意选取。
6.(判断)通过适当选择状态变量,可将线性定常微分方程描述其输入输出关系的系统,表达为状态空间描述。
7.(判断)传递函数仅适用于线性定常系统;而状态空间表达式可以在定常系统中应用,也可以在时变系统中应用.8.如果矩阵A 有重特征值,并且独立特征向量的个数小于n ,则只能化为模态阵。
9.动态系统的状态是一个可以确定该系统______(结构,行为)的信息集合。
这些信息对于确定系统______(过去,未来)的行为是充分且必要的。
10.如果系统状态空间表达式中矩阵A, B, C, D中所有元素均为实常数时,则称这样的系统为______(线性定常,线性时变)系统。
如果这些元素中有些是时间t 的函数,则称系统为______(线性定常,线性时变)系统。
11.线性变换不改变系统的______特征值,状态变量)。
现代控制理论试习题(详细答案

现代控制理论试题B 卷及答案一、1 系统[]210,01021x x u y x ⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦能控的状态变量个数是,能观测的状态变量个数是cvcvx 。
2试从高阶微分方程385y y y u ++=求得系统的状态方程和输出方程(4分/个) 解 12。
…..233118x x x x y x ==--=010080x ⎡⎢=⎢⎢-⎣分) 00⎣(5分)解 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++-,时系统从第k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于0的有限数,那么就称此系统在第k 步上是能控的。
若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。
…..….…….(3分)2.[][]320300020012 110-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=CA ………..……….(1分) [][]940300020012 3202=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=CA ……..……….(1分) ⎤⎡⎤⎡110C 1分)0140x ⎡⎤=⎢⎥⎣⎦ ()⎥⎦⎢⎢⎢⎣-=-8181881C U ……..…………..…….…….(1分) 11188P ⎡⎤=-⎢⎥⎣⎦……..………….…..…….…….(1分) ⎦⎤⎢⎣⎡=43412P ……..………….…...…….…….(1分)1314881148P -⎡⎤-⎢⎥=⎢⎥--⎢⎥⎣⎦..………….…...…….…….(1分) 101105C A PAP -⎡⎤==⎢⎥-⎣⎦………….…...…….…….(1分) ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==1011 43418181Pb b C ……….…...…….…….(1分)1分) 解(3分) 3分)2分)(81分)11121112221222420261p p p p p ⎪-+=⎨⎪-=-⎩………...……....…….…….(1分) 112212743858p p p ⎧=⎪⎪=⎨⎪=⎪⎩………...…………....…….…….(1分)1112122275485388p p P p p ⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦⎣⎦...…………....…….…….(1分) 111211122275717480 det det 05346488p p P p p ⎡⎤⎡⎤⎢⎥=>==>⎢⎥⎢⎥⎣⎦⎣⎦………...(1分) P 正定,因此系统在原点处是大范围渐近稳定的.………(1分)八、给定系统的状态空间表达式为1010x --⎡⎢=-⎢⎢⎣2322213332223321(21)3313332(3)(26)64E E E E E E E E E E E λλλλλλλλλλ=+++++++++++++=+++++++++ -- 2分 又因为 *32()331f λλλλ=+++ ------- 1分列方程32123264126333E E E E E E +++=++=+= ----- 2分1232,0,3E k E =-==- ----------- 1分观测器为10312ˆˆ0110010113x x u y ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=-++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦------- 1分 方法 2λ⋅分 分分分10ˆ0110x -⎡⎢=-⎢⎢⎣九 分) 1200A tAt A t e e e ⎛⎫= ⎪⎝⎭1A t t e e =…………………………..……….(1分) 11210()12s sI A s ---⎛⎫-= ⎪--⎝⎭101111212s s s s ⎛⎫ ⎪-= ⎪ ⎪- ⎪---⎝⎭………..……….(1分)(){}2112220t A t t t t e e L sI A e ee --⎛⎫=-= ⎪-⎝⎭……….…(1分)()112200000t At tt tt e e L sI A e e e e --⎛⎫ ⎪⎡⎤=-= ⎪⎣⎦ ⎪-⎝⎭……….……….(2分) 222001000001t t tt t t t e e e e e e e ⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭……………..……….(2分)一、(( × ( × ( √ ( √二、(的能控标准型、能观标准型和对角线标准型,并画出能控标准型的状态变量图。
现代控制理论试题(详细答案)

现代控制理论试题B 卷及答案2 1cvcvx ,一、 1 系统 x2xu, y 0 1 x 能控的状态变量个数是 0 1能观测的状态变量个数是cvcvx 。
2 试从高阶微分方程 y3y 8 y 5u 求得系统的状态方程和输出方程(4 分/ 个)解 1 . 能控的状态变量个数是 2,能观测的状态变量个数是 1。
状态变量个数是 2。
⋯ .. (4 分)2.选取状态变量 x 1y , x 2y , x 3y ,可得⋯ .. ⋯ . ⋯⋯ .(1 分)x 1 x 2x 2 x 3⋯.. ⋯. ⋯⋯ . (1 分)x 3 8x 1 3x 35uy x 1写成 0 1 0 0x0 0 1 x 0 u ⋯.. ⋯. ⋯⋯ . (1 分)8 035y 1 0 0 x ⋯.. ⋯. ⋯⋯ . (1 分)二、 1 给出线性定常系统 x( k 1) Ax( k) Bu( k), y(k) Cx (k) 能控的定义。
(3 分)2 1 0 2 已知系统 x0 2 0 x, y 0 1 1 x ,判定该系统是否完0 03全能观? (5 分)解 1 .答:若存在控制向量序列 u (k ), u(k 1), , u(k N 1) ,时系统从第k 步的状态 x(k) 开始,在第 N 步达到零状态,即 x( N ) 0 ,其中 N 是大于0 的有限数,那么就称此系统在第k 步上是能控的。
若对每一个 k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。
⋯ .. ⋯. ⋯⋯ . (3 分)2.2 1 0CA 0110 2 0 0 2 3⋯⋯⋯.. ⋯⋯⋯.0 0 3(1 分)2 1 0CA20230 2 0 0 4 9 ⋯⋯.. ⋯⋯⋯.(1分)0 0 3C 0 1 1U O CA 0 2 3 ⋯⋯⋯⋯⋯⋯ .. ⋯⋯⋯ . (1 分)CA20 4 9rankU O 2 n ,所以该系统不完全能观⋯⋯ .. ⋯. ⋯⋯ .(2 分)三、已知系统 1、 2 的传递函数分别为g1 (s)s2 1 ,g2s 1 3s 2( s)3s 2 s2s2求两系统串联后系统的最小实现。
《现代控制理论》习题册
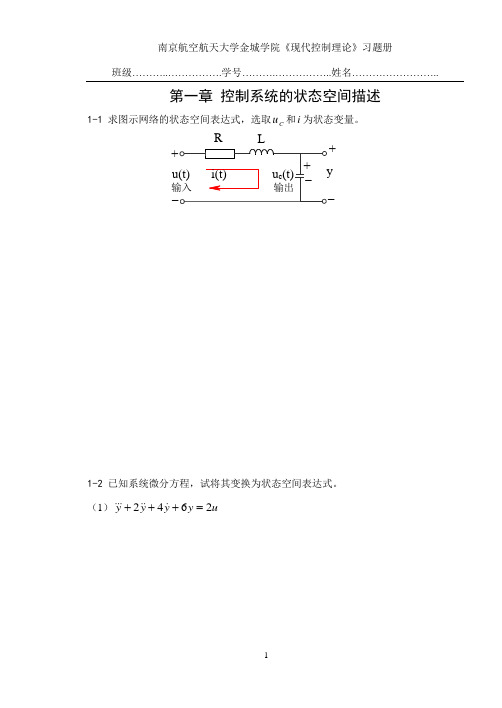
第一章 控制系统的状态空间描述1-1 求图示网络的状态空间表达式,选取C u 和i 为状态变量。
RL +1-2 已知系统微分方程,试将其变换为状态空间表达式。
(1)u y y y y 2642=+++(2)u u y yy 237+=++(3)u u u y y yy 23745++=+++(4)u u u u y y y y 81786116+++=+++1-3试画出如图所示系统的状态变量图,并建立其状态空间表达式。
1-4 已知系统的传递函数,试建立其状态空间表达式,并画出状态变量图。
(1)61161)(232+++++=s s s s s s G (2)6513)(22++++=s s s s s G(3))3()1(4)(2++=s s s s G (4)13332)(232+++++=s s s s s s G1-5 已知系统233)()(2+++=s s s s U s Y ,试求其能控标准型和对角标准型。
1-6 已知系统传递函数,试用并联法求其状态空间表达式。
(1)61161)(23+++=s s s s G (2)2545)(23+++=s s s s G1-7 试求下列状态方程所定义系统的传递函数。
⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21212121211001101142510x x y y u u x x x x1-8 试将下列状态方程化为对角标准型。
(1)u(t)x(t)(t)x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=106510(2)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=1751326712203010(3)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=01161161000101-9 试将下列状态方程化为约当标准型。
(1)u(t)x(t)(t)x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=102112(2)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=357213*********(3)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=100452100010第二章 线性控制系统状态空间表达式的解2-1 试求下列系统矩阵A 对应的状态转移矩阵。
(完整word版)现代控制理论习题解答

(完整word版)现代控制理论习题解答《现代控制理论》第1章习题解答1.1 线性定常系统和线性时变系统的区别何在?答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+&线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和D 中的各分量均为常数,⽽对线性时变系统,其系数矩阵A ,B ,C 和D 中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的⼀类系统,⽽线性时变系统的参数则随时间的变化⽽变化。
1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别?答: 传递函数模型与状态空间模型的主要区别如下:1.3 线性系统的状态空间模型有哪⼏种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对⾓线标准型。
对于n 阶传递函数1212101110()n n n n n n n b s b s b s b G s d s a s a s a ------++++=+++++L L ,分别有⑴能控标准型: []012101210100000100000101n n n xx u a a a a y b b b b x du---=+??----????=+LL &M M M O M M L LLb a b y xdu ---?--=-+?????-????=+??L L &%%L M M M M M M L %L ⑶对⾓线标准型: []1212001001001n n p p x x u p y c c c x du=+??????=+?L L &M M O M M L L 式中的12,,,n p p p L 和12,,,n c c c L 可由下式给出,12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p ------++++=+=++++++++---L L L 能控标准型的特点:状态矩阵的最后⼀⾏由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分⼦多项式系数,输⼊矩阵中的元素除了最后⼀个元素是1外,其余全为0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信息工程学院 现代控制理论 课程习题清单
3 学分,48 学 课程归属
学分、学时
时
(系、专业) 自动化系
授课专业 年级
自动化大三
总章节或
总单元
6
授课周数
16
教师教龄
2
命题教师
课程负责人
教学副院长
签名
签名
签名
课程目标:
自动控制领域的科学研究方法,已经由最早的经典控制中以输入输出模型为主,发展为
现今的现代控制中以状态空间模型为主。因而,“现代控制理论”是从事自动化专业必备的
复习题
2. 若已知系统的模拟结构图,如何建立其状态空间表达式? 3. 求下列矩阵的特征矢量
1 -1 0
A
4. (判断)状态变量的选取具有非惟一性。 5. (判断)系统状态变量的个数不是惟一的,可任意选取。 6. (判断)通过适当选择状态变量,可将线性定常微分方程描述其输入输
U(s) +
K1
+
KpsK1 +
1
- Kps K1
s
-
-
J1s
Kn s
Kb (s)
J2s2
练习题
图1-27系统方块结构图
2. 有电路如图所示,设输入为 ,输出为 ,试自选状态变量并列写出其状
态空间表达式。
R1
u1
u C1
R2
uC2
u2
3. 有电路如图 1-28 所示。以电压 u(t) 为输入量,求以电感中的电流和电
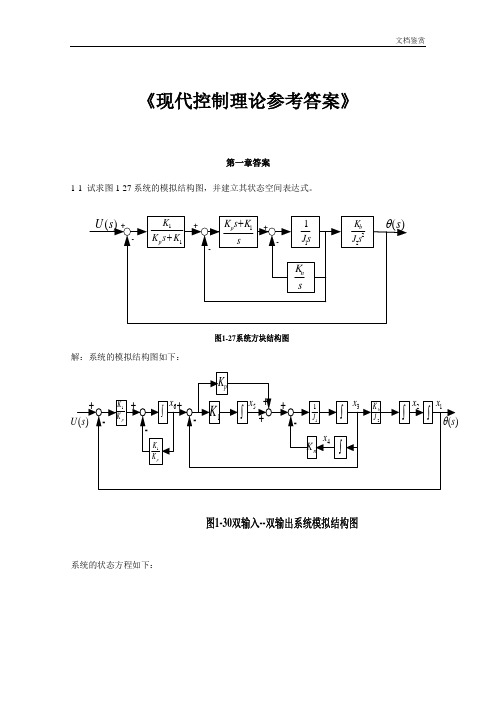
3 均为标量。
d
u
3
2
1
+
y
+
x3 1/s x3 +
1/s
x2
x2
+ x1
1/s x1
a3
a2
a1
7. 试求图中所示的电网络中,以电感 L1 、L2 上的支电流 x1 、 x2 作为状态
第一章(单元):
绪论
本章节(单元)教学目标:
主要介绍控制理论的产生背景及现代控制理论研究的主要内容,使学生对现代控制理论
的发展及其所研究的主要问题有一个初步了解,并且复习、补充有关《线性代数》的内容。
重点内容:逆矩阵、线性无关与线性相关定义、非齐次方程求解、哈密顿定理、定号性
理论等。
预习题
1.系统的数学描述可分为哪两种类型? 2.自然界存在两类系统:静态系统和动态系统,有何区别?
知识。“现代控制理论”的教学目标是使学生牢固树立线性系统中状态空间的概念、进一步
理解系统稳定性这一控制学科最为重要的概念,掌握能控与能观、状态反馈与状态估计等核
心方法。通过本课程学习,使学生做到各章概念融会贯通,解题方法灵活运用,分析解决实
际问题。从宏观角度把握课程的体系结构,建立起现代控制理论的基本框架。主要培养学生
试求其状态空间表达式和传递函数阵。
u1
b1 +
a -
-
1
y1
a2
a5
a6
1
u2
b +2 --
+
+
y2
a3
a4
图1-30双输入--双输出系统模拟结构图
6. 系统的结构如图所示。以图中所标记的 x1 、 x2 、 x3 作为状态变量,推
导其状态空间表达式。其中,u 、y 分别为系统的输入、输出,1 、 2 、
角阵,雅可比阵)。 14. 状态变量是确定系统状态的______(最小,最大)一组变量。 15. 以所选择的一组状态变量为坐标轴而构成的正交______(线性,非线性)
.
精选文档
空间,称之为______(传递函数,状态空间)。
.
精选文档
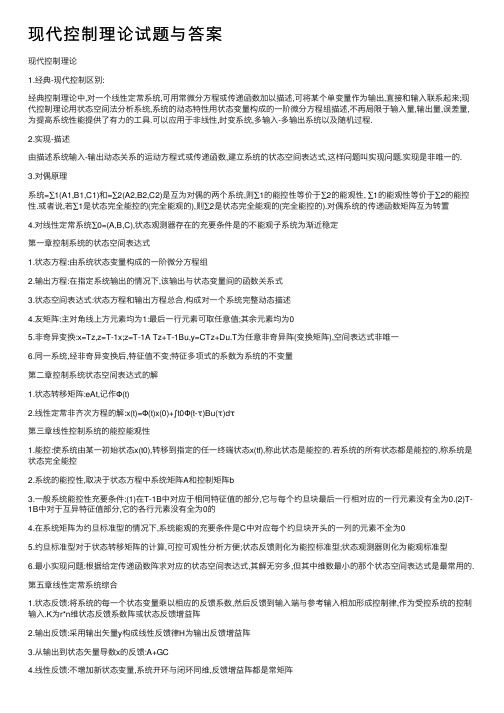
1. 试求图 1-27 系统的模拟结构图,并建立其状态空间表达式。
出关系的系统,表达为状态空间描述。
7. (判断)传递函数仅适用于线性定常系统;而状态空间表达式可以在定 常系统中应用,也可以在时变系统中应用.
8. 如果矩阵 A 有重特征值,并且独立特征向量的个数小于 n ,则只能化为 模态阵。
9. 动态系统的状态是一个可以确定该系统______(结构,行为)的信息集 合。这些信息对于确定系统______(过去,未来)的行为是充分且必要 的。
重点内容:状态空间表达式的建立,状态转移矩阵和状态方程的求解,线性变换的基本 性质,传递函数矩阵的定义。要求熟练掌握通过传递函数、微分方程和结构图建立电路、机 电系统的状态空间表达式,并画出状态变量图,以及能控、能观、对角和约当标准型。难点: 状态变量选取的非唯一性,多输入多输出状态空间表达式的建立。
1.现代控制理论中的状态空间模型与经典控制理论中的传递函数有何区别? 2.状态、状态空间的概念? 预习题 3.状态方程规范形式有何特点? 4.状态变量和状态矢量的定义? 5.怎样建立状态空间模型? 6.怎样从状态空间表达式求传递函数? 1. 怎 样 写 出 SISO 系 统 状 态 空 间 表 达 式 对 应 的 传 递 函 数 阵 表 达 式
容上的电压作为状态变量的状态方程,和以电阻 R 2 上的电压作为输出
量的输出方程。
R1
L1
L2
i1
i2
C --------Uc
U
---------
R2
图1-28 电路图
4. 建立图 P12 所示系统的状态空间表达式。
.
精选文档
K
B2
M1
B1
M2 f (t)
.
精选文档
5. 两输入 u1 , u2 ,两输出 y1 , y2 的系统,其模拟结构图如图 1-30 所示,
以下三个方面的能力:
1、分析建模能力
根据系统的工作原理或实验数据,建立合理的数学模型。
2、认知和理解能力
理解与掌握能控性、能观测性与系统设计的关系,系统矩阵与稳定性的关系,输出反馈
与状态反馈的关系。
3、设计实施能力
根据系统的不可变部分及给出的综合性性能指标,设计出满足控制系统要求的状态反馈
矩阵,并画出模拟电路图。
10. 如果系统状态空间表达式中矩阵 A, B, C, D 中所有元素均为实常数时, 则称这样的系统为______(线性定常,线性时变)系统。如果这些元素
中有些是时间 t 的函数,则称系统为______(线性定常,线性时变)系 统。
11. 线性变换不改变系统的______特征值,状态变量)。 12. 线性变换不改变系统的______(状态空间,传递函数矩阵)。 13. 若矩阵 A 的 n 个特征值互异,则可通过线性变换将其化为______(对
复习题
1.现代控制理论研究的主要内容是什么? 2.现代控制理论研究对象? 3.现代控制理论所使用的数学工具有哪些? 4.现代控制理论问题的解决方法是什么?
练习题 1.控制一个动态系统的几个基本步骤是什么?
第二章(单元):
.
精选文档
控制系统的状态空间表达式 本章节(单元)教学目标:
正确理解线性系统的数学描述,状态空间的基本概念,熟练掌握状态空间的表达式,线 性变换,线性定常系统状态方程的求解方法。