基于分布式的捷联导航计算机系统设计与实现
基于分布式的捷联导航计算机系统设计与实现
算机 ) 构成分布式姿态基准 系统 , 向各设备提供 姿
态信息 , 便能克服集中式和分立式姿态基准的弊端。
再有 , 当某个局部基准发生故障时 , 网络化布局的分
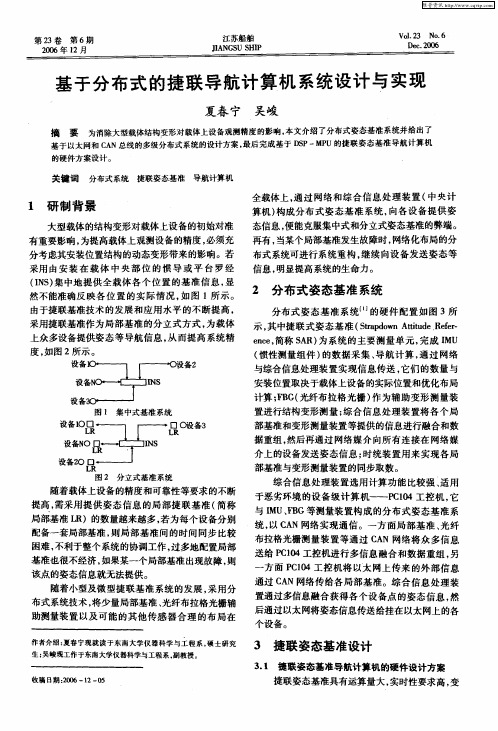
图 2 分 立 式 基 准 系统
随着载体上设备的精度和可靠性等要求的不断
综合信息处理装置选用计算功能 比较 强 、 适用 于恶劣环境的设备级计算机——P 14工控机 , C0 它
与 I U、B M F G等测量装 置构成的分布式姿态基准系
提高 , 需采用提供姿态信息 的局部捷联 基准 ( 简称
计算 ;B ( F G 光纤布拉格光栅) 作为辅 助变形测量装
图 1 集中式基准系统
口 。设备3
L R
置进行结构变形测量; 综合信息处理装置将各个局
部基准和变形测量装置等提供的信息进行融合和数
据重组 , 然后再通过 网络媒介 向所有连接在 网络媒 介上的设备发送姿态信息 ; 时统装置用来实现各局 部基准与变形测量装置的同步取数。
作者介绍 : 夏春 宁现 就读于 东南 大学仪器 科学 与工程 系 , 硕士 研究 生; 吴峻现工作 于东南大学仪器科学与工程系 , 副教授。
方面 P 14工控机将 以太 网上传来 的外部信息 C0
通过 C N网络传给各局部基准。综合信息处理装 A 置通过多信息融合获得各个设 备点 的姿态信息 , 然 后通过以太网将姿态信息传送给挂在以太网上的各 个设备。
高、 功耗最低的一种芯片。该芯片采用 3 3 电压 .V
数字信号处理器 ( S )是专 为高速数据处理 DP 而设计的微处理器。从结构特点上来看 , 具有改进
基于DSP的捷联惯导计算机系统的设计与开发
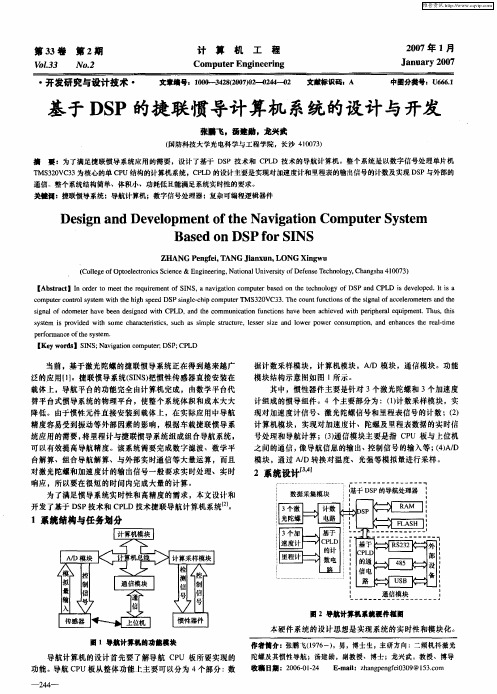
精度容易 受到振动等外部 因素 的影响 ,根据车载捷联惯导 系 统应 用的需要 , 将里程计与捷联惯导系统组成组合导航系统 , 可以有效提高 导航精 度。该 系统需要 完成 数字 滤波、数 学平 台解算、组合导航解算 、与外部实 时通信等大 量运 算,而且 对激光陀螺和加速 度计 的的计算 。 为了满足惯导 系统实 时性 和高精 度的需求 ,本文设 计和
c omp trc nr l yse wi h ihs e d DS sn l h pc ue o to tm t tehg p e P ige c i omp tr s h ue S 2 TM 3 0VC3 Th o n u ci n ftesgn lo c eeomee sa dte 3. ec u tf n to so i a fa c lr h tr n h sg a fo omee v e n d sg e t LD. n h o mu iain fncin a e b e c iv d wi e p ea q ime t in lo d trha e b e e in d wih CP a d tec m nc to u to sh v e n a he e t p r h rle up n.Th s hi h i u .t s
p ro ma c f h y t e r n e o e s sem. f t
[ e od l SN ; a i t n o p t ; S ; P D K y rs I S N v a o m u rD P C L w gi c e
当前 , 基于激 光陀螺的捷联惯导系统正在得到越来越广 泛的应 用… 。捷联惯 导系统( N ) S S把惯性传感器直接安装在 I 载体 上,导航平 台的功能完全 由计算机完成 ,由数 学平 台代
基于PC104和DSP的分布式导航计算机设计
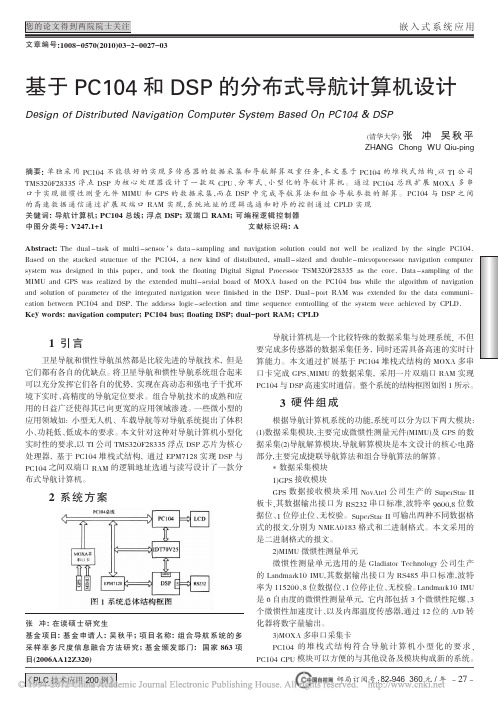
邮局订阅号:82-946360元/年技术创新嵌入式系统应用《PLC 技术应用200例》您的论文得到两院院士关注基于PC104和DSP 的分布式导航计算机设计Design of Distributed Navigation Computer System Based On PC104&DSP(清华大学)张冲吴秋平ZHANG Chong WU Qiu-ping摘要:单独采用PC104不能很好的实现多传感器的数据采集和导航解算双重任务,本文基于PC104的堆栈式结构,以TI 公司TMS320F28335浮点DSP 为核心处理器设计了一款双CPU 、分布式、小型化的导航计算机。
通过PC104总线扩展MOXA 多串口卡实现微惯性测量元件MIMU 和GPS 的数据采集,而在DSP 中完成导航算法和组合导航参数的解算。
PC104与DSP 之间的高速数据通信通过扩展双端口RAM 实现,系统地址的逻辑选通和时序的控制通过CPLD 实现关键词:导航计算机;PC104总线;浮点DSP;双端口RAM;可编程逻辑控制器中图分类号:V247.1+1文献标识码:AAbstract:The dual -task of multi -sensor ’s data -sampling and navigation solution could not well be realized by the single PC104.Based on the stacked structure of the PC104,a new kind of distributed,small-sized and double-microprocessor navigation computer system was designed in this paper,and took the floating Digital Signal Processor TSM320F28335as the core.Data-sampling of the MIMU and GPS was realized by the extended multi-serial board of MOXA based on the PC104bus while the algorithm of navigation and solution of parameter of the integrated navigation were finished in the DSP.Dual-port RAM was extended for the data communi -cation between PC104and DSP.The address logic-selection and time sequence controlling of the system were achieved by CPLD.Key words:navigation computer;PC104bus;floating DSP;dual-port RAM;CPLD文章编号:1008-0570(2010)03-2-0027-031引言卫星导航和惯性导航虽然都是比较先进的导航技术,但是它们都有各自的优缺点。
分布式计算系统的设计与实现
分布式计算系统的设计与实现随着互联网的发展,大数据和高速计算变得越来越重要。
分布式计算系统的出现可以更方便地实现这些目标。
在分布式计算系统中,计算任务被拆分到多个计算节点,每个节点分别计算负载的一部分。
通过组合所有节点的结果,可以获得整个计算任务的结果。
在这篇文章中,我们将深入探讨分布式计算系统的设计和实现,主要包括以下几个方面:1. 系统架构设计2. 通信协议设计3. 数据存储设计4. 节点管理设计5. 性能优化设计1. 系统架构设计一个分布式计算系统通常由多个节点组成,每个节点拥有自己的计算资源和存储资源。
节点之间通过通信协议进行通信,并且协调所有节点的计算任务。
在设计系统架构时应该考虑到以下因素:• 负载均衡:任务应该均衡地分配到所有节点上,以实现每个节点的最大利用率。
• 可扩展性:系统应该能够轻松地增加或减少节点,以处理不断变化的计算需求。
• 容错性:系统需要具备高可靠性,尽管单个节点可能会失败或长时间无响应。
• 安全性:在分布式计算中,节点之间的通信和数据传输需要保证安全。
一些常见的系统架构包括:• 客户端-服务器架构:这是最常见的传统架构,其中一个中心服务器负责管理所有节点的计算任务。
• 对等网络架构:系统中所有节点都是平等的,并且任何节点都可以接受并处理请求。
• 混合网络架构:此架构与对等网络架构相似,但是有一些节点在网络中扮演中心服务器的角色。
2. 通信协议设计在分布式计算中,节点之间需要高效地通信,并且要确保数据传输的正确性和安全性。
一个好的通信协议应该能够支持以下功能:• 节点之间的消息传递• 数据传输的可靠性和完整性• 新节点加入和节点离开时的自动发现和注册• 数据序列化和反序列化以及压缩一些常用的通信协议包括:• HTTP:向着互联网开放的协议,可以轻松地与其他系统集成。
• RPC:Remote Procedure Call的缩写,可以方便地调用远程节点上的函数或方法。
• TCP/IP:适用于高流量和高带宽的应用程序。
基于Voyager平台的动态分布式计算系统的实现
基于Voyager平台的动态分布式计算系统的实现第27卷第2期武汉理工大学?信息与管理工程版生』QOFWUT(INFORMATION&MANAGEMENTENGINEERINGV ol_27No.2 ADr.2005文章编号:1007—144X(2005)02~0030—04基于V oyager平台的动态分布式计算系统的实现冉春玉,陈敏,毕建信,谷川(武汉理工大学计算机科学与技术学院,湖北武汉430070)摘要:阐述了在V oyager平台下如何实现一个能够动态加载计算任务,并能够将计算任务分解成各个子任务,同时生成代理并移动到指定的子结点上运行,生成的结果文件再保存到指定的地址.关键词:V oyager动态;分布式计算;代理中图法分类号:TP301.6文献标识码:A1前言智能软件Agent是能为用户执行特定的任务,具有一定的智能,以允许自主执行部分任务并以一种合适的方式与环境相互作用的软件程序.在当今分布式系统已经得到了广泛的认同,它较集中式系统而言有着很多的优点.很多分布式系统所实现的都是依据固定的计算公式来进行计算,固定的处理方法.这种结构不能很好的在不关闭运行程序的情况下动态加载计算任务以及动态加入和删除节点.然而要实现计算任务的动态加载不仅涉及到计算任务类的导人,任务的智能识别和智能分发,而且也涉及到计算任务的一致性以及通用性….如果采用一般的通信模式,那么就不具有通用型,当然也就无法实现类的任务的动态执行.笔者对这个问题提出了解决方案, 并实现了一个动态分布式计算系统.2Agent传输协议Agent传输协议定义了移动Agent传输的语义和语法,具体实现了Agent在服务设施问的移动机制.IBM提出的ATP框架结构定义了一组原语性的接口和基础的消息集,可以看作是一个传输协议的最小实现,其基本的操作如图1所示. 目前研究的重点是可靠而实时的传输,这是传输信息能否到达的根本保证,而后就是接口的通用性以及功能的完整性.当然这只是最底层的通信协议,对它的实现并没有一个规定.Dispath(分派)Retract(召回)Fetch(提取)Message(消息)Response(相应)图1传输协议的基本操作3V oyager平台要实现计算任务的动态移动,并能够实现结点之间的通信,选择一个理想的移动Agent开发平台非常重要.移动Agent技术虽然已经研究了很多年,但直到1996年才出现了真正实用的移动Agent系统,已从过去的理论探索进入到实用阶段,目前使用的移动Agent系统大致可以分为如下3类:第一类是基于传统解释语言的;第二类是基于Java语言的;第三类则是基于CORBA平台的J.由于本方案是基于Java的,故只考虑基于Java语言的移动Agent开发平台.GeneralMagic公司的Odysses系统,它是一个全用Java实现的移动Agent系统Odyssey,能够支持JavaRMI,MicrosoftDCOM以及CORBAIIOP.Odyssey继承了Telescript中的许多特性,是目前被广泛使用的一个移动Agent开发平台.Aglet是最早基于Java的移动Agent开发平台之一.Aglet的名字来源于Agent和Applet,可收稿日期:2004一l2—28.作者简介:冉春玉(1945一),男,湖北武汉人,武汉理工大学计算机科学与技术学院教授.基金项目:湖北省科技开发资助项目(2003717).3127禚第2玉等:基于V oyager的动态以简单地将其看成具有Agent行为的Applet对象.Aglet以线程的形式产生于一台机器,需要时可以随时暂停正在执行的工作,并将整个Aglet分派到另一台机器上,然后继续执行尚未完成的任务.从概念上讲,一个Aglet就是一个移动Java对象,它支持自动运行的思想,可以从一个基于Aglet的主机移动到其他支持Aglet的主机上.V oyager的第三代产品已经集成了RMI/CORBA/DCOM,而且可以在运行期生成远程对象的代理,这样就不需要rmic或是V oyager先前版本中使用的增强性rmic:VCC.总体来说,V oyag—er的功能有远程对象生成,迁移,远程引用,出错处理,名字服务,分布式垃圾回收,移动代理,Ap—plet通信,群组通信,远程激活,独立与数据库的分布式持久化,ORB,CORBAR,RMI和DCOM等. 不仅如此,V oyager平台同其他移动Agent系统相比,V oyager与Java语言的结合更加紧密,既可用于开发移动Agent系统,也可用于创建传统的分布式系统.V oyager是一个纯Java分布式计算平台,可用来迅速生成高性能分布式应用程序,是代表当前技术水平的一个优秀的移动Agent开发平台,因此它很适合当前方案.4系统的工作流程用户首先提交自己的计算任务文件到指定的目录,如果系统是第一次运行,那么需要先添加子结点到根结点.如果系统已经启动,那么系统会把当前的计算任务执行完以后来动态加载该计算任务文件.这个计算任务必须能够自动分解成子任务,这样根节点就可以将任务分解,生成子任务,进而生成一个个代理,然后查询可用的子结点集,通过移动代理平台移动到相应的节点进行计算,在结点运算完成后,代理返回,根结点对结果进行处理并保存最终结果文件(如图2).在这个流程中,子任务(Agent)必须带有一定的状态,这样才能够识别这个任务基本情况.而且系统必须做出一些出错处理,例如子结点由于自然原因或者人为的错误导致机器突然关闭,或者是网络故障而无法通信,那么代理就需要设定一个时间戳;如果在规定的时间返回,那么有效;如果时间太长而不能返回,那么这个代理就要移动到别的节点上再进行运算.5关键技术本系统是用Java语言实现的,编译器使用图2根结点对结果处理并保存最终结果文件JDK_5.0,V oyager4.7.运行前必须先在根结点处添加子结点,才能正常运行.5.1实现动态加载计算类要实现计算任务的动态加载,本系统要求必须将编译好的类文件放到指定的存放地点,例如C:\task.程序首先搜索此路径(或者是当当前计算任务完成以后),发现新的计算任务,则加载之,整个计算任务完成后,将生成相应的结果文件,结果文件以计算任务名加'result'字符串为文件名.Java的动态类载人机制中与动态类载人有关的系统类是在系统类组java.1ang中提供的2个类:Class类和ClassLoader类.其中Class类提供了一个静态的方法forName(),其参数只能是像iava.rmi.Remote这样的本地系统类名,即在ClassPath中设定了的类文件,然而现在是在本地机器(或者说是在网络中的一台服务器中,现暂不考虑,道理是一样的)中.而ClassLoader是一个抽象类,那么必须继承并重写它的loadClass() 方法,所以需要实现一个MyClassLoader类.简要代码如下:要想取得以.calss结尾的类文件,那么必须实现一个目录过滤器DirFileter.它实现了FilenameFileter接口,接口方法是accept(). Filepath=newFile("C:\task");String[]list=path.1ist(newDirFiher("class"));…如果有新的计算任务,则检验是否有新的计算任务加入.MyClassLoaderLoader=newMyClassLoader ();ClassNewTask:Loader.1oadClass(nanle); IMTaskTask=(IMTask)NewTask.newIn-stance();//得出动态导人类的一个实例动态加载函数类MyClassLoader继承了Class—32'汉堡堂堂Loader,并覆盖了loadClass(String)和loadC1ass (String,Boolean). publicsynchronizedclassloadClass(String name){ClassnewClass;byte[]classdata;classData=getClassData(name);//得到类数据newClass=defineClass(classData,0,calssDa—ta.1ength);//将字节数组中的数据定义为Class 类型的对象,字节数组的格式由虚拟机规定. retumnewClass;}protectedbyte[]getClassData(Stringname){//局部变量定义省略Filefile=File(dir,name); BufferedReadinStream=newBufferedRead (newFileRead(file));Instream.read(data,0,file.1engh());//从指定的文件读出类数据retumdata;}至于loadClass的另外一个多态方法的boole—an型的参数,它表示类是否需要解析,而在这并不需要解析,故只需简单的将其设为false并调用上面这个方法即可.5.2计算任务类的实现在这个系统中,计算任务类MTask能够将其任务分解成很多子任务类CTask,然后将CTask 转化成它的ICTask接口,而子任务能够携带数据迁移到指定的子结点上并能够计算,计算完后,子任务能够继续接受数据,并运算.同时MTask也有其接口IMTask,所有的计算任务类都能够实现这个接口.IMTask接口主要有一个run()方法.ICTask接口主要有startup方法和seLParameter方法.所有实现这两个接口的类,都必须提供让子任务能够正常接受运行参数并能够顺利启动.虽然这两个接口都比较简单,但是它却能将所有实现了这两个接口的向上转型成这个接口,从而可以比较通用的改变计算类方法的实现.Ctask也比较简单,它只需实现startup方法和setParameter方法, 由于它要迁移,因此需要对它进行序列化.根据计算任务的不同Mtask类具体的算法会有一些改变,但是大致不会变.MTask类有如下属性(根据计算任务的不同还应该有别的属性): (1)flag(byte):标示任务的执行情况,0表示还没有开始计算(默认值);1表示任务正在执信息与管理工2005年4月行;2表示任务已经正常结束;一1表示任务非正常结束.(2)Typeresult:这里存放着结果.(3)Hashtabledestination:这里存放着可用子结点的地址和端口号.它的方法如下:run():执行任务.其功能是分解任务成子任务,然后从可用子结点中选出一个,生成一个代理并移动到指定的节点,而生成代理需要用到V oy—ager平台所提供的移动代理服务. publicvoidrun(){…//初始化省略V ectortask=newV ector(Hashtable.size);for(inti=0;I<=Hashtable.size;i++){task.add(newCtask());}while(condition){//condition表示是否还有子任务可以分配CTaskctask=task.get(index);If(!ctask.isUsed())continue;……//如果计算任务正常结束,对结果处理ctask.setParameter(parameter);//设置子任务的参数ICTaskclientTask=(ICTask)Proxy.of(ctask);IAgenttaskAgent=Agent.of(clientTask);//生成代理TaskAgent.moveTo(dest,"statup");}//dest从结点集中得到可用结点代理移动到指定的机器上,移动完成之后调用ICTask的方法startup();…}//生成结果文件,保存到当前目录或指定目录.5.3添加删除子结点系统第一次运行时如果想添加子结点必须先在子结点上运行V oyager程序,而后再在根结点上添加子结点,添加方式为添加计算机名或者是IP地址和端口号.只有这样才能保证根结点能够找到子结点,并与之相连.例如根结点计算机名为whut000,端口号为8000.而子结点的计算机名为whutO01,那么子结点的启动方式为在命令行处输入>voyager8000一Chttp://whutO00: 8000,当回显voyagerorbprofessional4.6,copy—fightrecursionsoftware1997—2003时表明子结点的V oyager平台已经启动成功.而根结点启动方式是通过程序启动:3327鞣第2玉等:基于V0V oyager.startup("8000");//启动V oyager平台;ClassManager.enableResourceServer();//激活http服务.系统运行时如果要想添加新的子结点就需要维护一个可用子结点集.由于是动态接收,在系统中是通过在用户GUI中添加一个Button,用它来捕获鼠标事件,在actionPerformed()方法中将结点地址,端口号和相关资料添加进来.这样就会使计算任务工作无法继续进行,因此需要运行一个工作线程来单独处理计算任务,同时也能保证用户界面的反应灵敏性.6扩展按照本系统设计,它只能有一个根结点,但是可以有很多个子结点.如果是这样的话,当子结点过多的话,根结点既要处理子结点的计算结果又要分配任务,那样它的负荷就会很大,这时就需要用到负载平衡和自组网.也就是需要增加枝结点并能够将根结点分配的任务重新再分配,它也能够接收子结点(枝结点和叶结点),当然所增加的结点需要让其父结点知道并保存.这在本系统的基础上是比较容易解决的,所用到的技术还是对象代理的迁移,当然还需要对计算任务类进行改动J.7结束语在本系统中由于采用了V oyager平台,所以在对象的生成代理和迁移方面非常容易实现,它能显着的提高编程效率,同时也能使编程人员将主要精力放在计算任务的实现上.由于使用对Java中提供的动态加载类进行了重载,采用了自己的加载方式,从而能够加载自己想加载的类而不是只能加载系统类或是在ClassPath中设定的类包.只要对程序稍加修改即可从网络上加载class文件,因此本系统的扩展型是比较强的.参考文献:BogerM.Java与分布式系统[M].曹学军译.北京:机械工业出版社,2003.GbruceEcke1.Java编程思想(第二版)[M].侯捷译.北京:机械工业出版社,2004.杨海,熊齐邦.关于CORBA与移动代理结合用于网络管理的研究[J].计算机应用研究,2004(8):20—22.徐宏酷,聂影.黄征华.基于移动代理的远程教育系统[J].中国远程教育,2004(11):13—15.曹华东,白立.傅汝霖.基于移动Agent的对象请求代理(ORB)扩展[J].计算机工程,2004(09):17—19.许力,郑宝玉,吴子文.主动网络的安全策略[J].计算机系统应用,2003(10):21—23. RealizationoftheDynamicDistributedComputingSystemBasedonV oyagerPlatformRanChunyu,ChenMin,BiJianxin,GuChuanAbstract:Amethodofhowtodynamicallyloadthecomputingtasks,howtodisassembletheta skintosub—tasks,howtogenerateagenciesandmovethemtothedesignateddestinations,andhowtosavef ilesindesig—natedaddressesisanalyzedbasedontheV oyagerPlatform.Keywords:V oyagerdynamic;distributedcomputing;agencyRanChunyu:Prof.;SchoolofComputerScienceandTechnology,WUT,Wuhan430070,Chi na.[编辑:李道文]1J1J1J1J1J23456。
卫星导航捷联惯性导航系统的建模与设计
卫星导航捷联惯性导航系统的建模与设计导航系统在现代社会中起着不可或缺的作用。
随着卫星导航技术的快速发展,卫星导航捷联惯性导航系统(SGINS)成为一种高精度、高可靠性的导航解决方案。
本文将探讨SGINS的建模与设计方法。
一、SGINS的基本原理卫星导航捷联惯性导航系统是将全球定位系统(GPS)和惯性导航系统(INS)相互融合的一种导航方案。
GPS通过接收卫星发射的定位信号来确定位置,但其精度受环境因素和信号传播延迟的影响。
而INS则通过测量加速度和角速度来估计位置和姿态,但由于积分误差的累积,导航精度会随时间增长而降低。
SGINS利用GPS和INS互补的性质,实现了位置和姿态的精确估计。
二、SGINS的建模方法1. 系统状态估计SGINS的建模首先需要考虑系统状态的估计问题。
系统状态通常包括飞行器的位置、速度和姿态等信息。
可以使用卡尔曼滤波器来处理系统状态的估计问题,通过状态观测和预测来优化估计结果。
同时,还需要根据系统的实际情况选择合适的状态表示和测量模型,以提高估计的准确性。
2. 误差建模SGINS中的误差主要来自于GPS和INS的测量误差,需要进行误差建模和补偿。
对于GPS测量误差,可以通过统计分析和模型辨识来进行建模。
INS测量误差主要包括随机误差和系统误差,可以通过校准和校正来减小。
此外,还需要考虑动态误差和环境因素对误差的影响,例如加速度噪声、温度变化等。
3. 系统动力学建模SGINS的建模还需要考虑系统的动力学特性。
对于飞行器的运动状态,可以利用运动学和动力学方程来描述。
此外,还需要考虑外部扰动和不确定性对系统动力学的影响,以提高系统的稳定性和鲁棒性。
三、SGINS的设计方法1. 系统硬件设计SGINS的设计首先需要选取合适的硬件组件,包括GPS接收器、惯性传感器和计算单元等。
对于GPS接收器,可以选择多系统接收器,以提高定位精度和可用性。
对于惯性传感器,可以选择高精度的加速度计和陀螺仪,以减小测量误差。
分布式系统的架构设计及实现

分布式系统的架构设计及实现随着互联网的蓬勃发展,大量的数据处理需求不再是单一的、独立的任务,而是需要多方协作共同完成的任务。
这就引出了分布式系统的概念,通过将一个巨大的系统分解成许多小的子服务,利用不同的计算节点完成不同的任务,分布式系统不仅可以提高系统的可拓展性和稳定性,还可以让我们更好的处理数据,实现更高的运算效率和运算速度。
一、分布式系统的架构设计在分布式系统的架构设计中,我们要考虑到许多因素,例如系统的可靠性、可拓展性、安全性等等。
下面分别对这些因素进行论述:1. 可靠性在设计分布式系统时,我们需要预见到其中的风险,并采取措施来消除或降低这些风险。
例如,我们如何防止网络抖动,如何防止单个计算节点宕机等等。
通常,我们采用的方案是冗余和容错。
通过使用冗余计算节点,系统可以继续运行,即使有某些计算节点宕机了。
而容错能力则可以保证数据的正确性,例如通过使用额外的校验位,修复数据被损坏的问题。
2. 可拓展性当需求增加时,分布式系统应该可以轻松地增加节点,而不会导致系统的瘫痪或降低。
为此,我们需要采用可伸缩性架构来解决这个问题。
可伸缩性架构需要满足以下两个条件:其一,能够水平扩展,即在多个计算节点间分配负载,以避免单个节点过度负担所导致的性能下降;其二,能够垂直扩展,即提高单个节点的处理能力,以克服单个节点的限制。
3. 安全性在分布式系统中,各个计算节点之间的通信是很容易受到黑客攻击和嗅探的。
因此,系统安全性很重要。
我们需要考虑到如何为数据保密、如何保证数据真实性、如何防止拒绝服务攻击等等问题。
通常,我们采用加密和身份认证来保障系统安全。
通过使用加密技术,我们可以使得数据传输无法被黑客窃听,而身份认证则可以保证只有授权用户才有权限进行数据的读、写和修改。
二、分布式系统的实现在实现分布式系统时,我们通常会遇到许多问题,例如如何选择技术栈、如何设计数据模型等等。
下面分别对这些问题进行论述:1. 技术栈的选择在选择技术栈时,我们需要考虑到系统的适用场景、技术的稳定性和可拓展性。
计算机专业的分布式系统设计
计算机专业的分布式系统设计随着科技的不断发展,计算机领域的分布式系统设计成为了一个热门话题。
分布式系统是由多个计算机节点组成的,这些节点通过网络连接并合作完成任务。
本文将探讨计算机专业的分布式系统设计。
一、什么是分布式系统设计?分布式系统是由多个计算节点组成的系统,节点之间通过网络进行通信和协调。
每个节点独立运行,并且可以在任意时间加入或退出系统。
分布式系统设计是指对这个系统的整体设计和架构进行规划和优化的过程。
二、分布式系统设计的重要性1. 可伸缩性:分布式系统可以根据需求增加或减少节点,实现系统的可伸缩性。
这意味着系统可以应对不同规模和负载的环境。
2. 容错性:分布式系统可以分布在多个节点上,一旦某个节点出现故障,其他节点可以接管任务,保证系统的可靠性和稳定性。
3. 高性能:通过将任务分配给多个节点处理,分布式系统可以实现高并发处理,提高系统的性能。
4. 数据一致性:在分布式系统中,节点之间需要保持数据的一致性。
设计一个有效的数据同步和更新策略是分布式系统设计的重要一环。
三、分布式系统设计的关键问题1. 节点通信:节点之间的通信是分布式系统中的核心问题。
设计合适的通信协议和数据传输方式可以实现节点之间的高效通信。
2. 负载均衡:在分布式系统中,各个节点的负载应该均衡分布,避免某个节点过载而导致系统性能下降。
设计合理的负载均衡策略可以提高系统的性能。
3. 数据一致性:在分布式系统中,节点之间的数据一致性是一个挑战。
设计合适的数据复制和同步策略可以确保数据的一致性和可靠性。
4. 容错处理:分布式系统需要具备容错能力,即使某个节点出现故障,系统仍然能够正常运行。
设计适当的容错机制可以提高系统的可靠性。
四、分布式系统设计的案例分析以云计算系统为例,展示分布式系统设计的实际应用和挑战。
1. 节点规划:根据系统需求和用户数,设计合适的节点规模和分布。
考虑到不同节点的性能和通信开销,合理划分节点可以提高系统的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
- 1 -基于分布式的捷联导航计算机系统设计与实现夏春宁,吴峻东南大学仪器科学与工程系(210096)xcn25@摘要:为消除大型载体结构变形对载体上设备观测精度的影响,本文介绍了分布式姿态基准系统并给出其设计方案,最后完成捷联姿态基准导航计算机的硬件方案设计。
关键字:分布式系统 捷联姿态基准 导航计算机 DSP引言大型载体的结构变形对载体上的设备的初始对准有重要影响,为提高载体上观测设备的精度,必须充分考虑其安装位置结构的动态变形带来的影响。
若采用由安装在载体中央部位的惯导或平台罗经(INS )集中地提供全载体各个位置的基准信息(如a 图)[]1,显然不能准确反映各位置的实际情况。
由于捷联基准技术的发展和应用水平的不断提高,采用捷联基准作为局部基准的分立式(如b 图)方式[]1,为载体上众多设备提供姿态等导航信息,从而提高系统精度。
随着载体上设备的精度和可靠性等要求的不断提高,需采用提供姿态信息的局部捷联基准(简称局部基准LR) 的数量越来越多,若为每个设备分别配备一套局部基准,则局部基准间的时间同步比较困难,不利于整个全系统的协调工作,过多地配置局部基准也很不经济,如果某一个局部基准出现故障,则该点的姿态信息就无法提供。
随着小型及微型捷联基准系统的发展,采用分布式系统技术,将少量局部基准、光纤布拉格光栅辅助测量装置以及可能的其他传感器合理的布局在全载体上,通过网络和综合信息处理装置(中央计算机)构成分布式姿态基准系统,向各设备提供姿态信息,便能克服集中式和分立式姿态基准的弊端。
再有,当某个局部基准发生故障时,网络化布局的分布式系统可进行系统重构,继续向设备发送姿态等信息,明显提高系统的生命力。
1.分布式姿态基准系统[]1分布式姿态基准系统的硬件配置如图1,其中捷联式姿态基准(Strapdown Attitude Reference,简称SAR )为系统的主要测量单元,完成IMU (惯性测量组件)的数据采集、导航计算、通过网络与综合信息处理装置实现信息传送,它们的数量与安装位置取决于载体上设备的实际位置和优化布局计算;FBG(光纤布拉格光栅)作为辅助变形测量装置进行结构变形测量;综合信息处理装置将各个局部基准和变形测量装置等提供的信息进行融合和数据重组,然后再通过网络媒介向所有连接在网络媒介上的设备发送姿态信息;时统装置用来实现各局部基准与变形测量装置的同步取数。
综合信息处理装置选用计算功能比较强、适用于恶劣环境的设备级计算机--PC104工控机,它与IMU,FBG等测量装置构成的分布式姿态基准系统,以CAN网络实现通信。
一方面局部基准、光纤布拉格光栅测量装置等通过CAN网络将众多信息送给PC104工控机进行多信息融合和数据重组,另一方面PC104工控机将以太网上传来的外部信息通过CAN网络传给各局部基准。
综合信息处理装置通过多信息融合获得各个设备点的姿态信息,然后通过以太网将姿态信息传送给挂在以太网上的各个设备。
2.捷联姿态基准设计2.1捷联姿态基准导航计算机的硬件设计方案捷联姿态基准具有运算量大,实时性要求高,变量动态范围大,计算精度要求高等特- 2 -点。
捷联姿态基准的主要任务有以下三类:1、数据采集;2、数据处理与导航等运算;3、导航数据输出。
数字信号处理器(DSP) 是专为高速数据处理而设计的微处理器。
从结构特点上来看, 具有改进的哈佛结构(数据与程序分开,以提高数据吞吐量)、专用的硬件乘法器、多功能单元并行操作、专用寻址单元、多级流水机制(减少指令执行时间)、高效的精简指令集等, 使芯片的指令周期降到10ns 以下, 在需要大运算量实时处理的环境中,非常适合用DSP芯片来实现。
从制造工艺上来看, 其采用先进的制造工艺使其体积小、重量轻、功耗低。
目前,DSP 的价格越来越低,性价比日益提高,且系统设计开发方便、产品易于集成,已成为低成本、小型化的捷联基准系统的首选微处理器。
一个捷联基准除了要完成大量的运算处理工作外,还要实现惯性测量元件(陀螺仪和加速度组件)的数据采集、与外部系统的通信、时序逻辑控制等功能,在这样的情况下,由于DSP芯片本身处理能力和结构的限制,仅用一个DSP芯片来完成,会影响系统的实时性能。
采用两个或多个DSP或由一个通用微处理器MPU加一个或几个DSP构成主从式多处理器是23、。
由DSP主要完成导航计算任务,也就是计算模块实现的功能,可选择地系统实现方案[]其他处理器实现数据采集和通信控制模块功能。
常用的单片微处理器以控制能力见长而运算能力一般,与DSP 结合可以实现优势互补。
所以利用一个MPU加上一个DSP构成主从式多处理器系统,是一个比较理想的方案。
DSP作为从机主要完成主机间的数据交换、捷联惯性系统的算法运算等功能;MPU作为主机主要完成FOG光纤陀螺仪(数字信号,3路串口输出)的采集、加速度计(6路脉冲信号)的采集、与从机间的数据交换、导航信息输出、与外部系统通信等功能;整个系统在定时控制下同步协调工作。
捷联姿态基准导航计算机硬件结构框图如图2 Array2.2系统硬件本系统的DSP芯片采用TI公司的TMS320VC33,它是TMS320C3X系列中性价比最高、功耗最低的一种芯片。
该芯片采用3.3V电压(核心电压是1.8V ),即使工作在最高速度,其功耗也- 3 -- 4 -低于200mW ;内部继承了34K 字的双向访问静态RAM ,可满足大部分系统对RAM 的要求;浮点型的TMS320VC33,字长32位,累加器40位,运算精度较高;有足够的处理能力,VC33有一120和-150两种,-120主频17ns,120MFLOPS, 60MIPS ; -150主频13ns,150MFLOPS, 75MIPS 。
适合于运算量大、实时性要求高、计算精度要求高的捷联姿态基准系统。
VC33外围主要由晶振电路,电源电路,复位电路等组成。
VC33片内存储区实际上无法满足导航计算机存储数据和运行程序的需要,必须在片外扩展存储区,包括静态RAM 区(SRAM )和永久ROM 区(FLASH )。
由于系统对实时性要求高,与DSP 接口电路尽量采用快速零等待状态器件,同时采用3.3V 的器件可以与VC33直接连接。
MPU 选择C8051F040单片机,它是混合信号片上系统级单片机,内含CAN2.0B 控制器,25MIPS 高速流水线式CIP-51控制器内核,64KB 的可编程FLASH 存储器,RAM 可存储4352(4096+256)字节,SPI 、SMBus 和2个UART 串行接口,有12位的ADC ,8位的多通道DAC ,片内有看门狗定时器,温度传感器等,工作电压为2.7V -3.6V 。
进一步信息可参考文献[5]。
C8051F040的端口I/O 、/RST 和JTAG 引脚都容许5V 的输入信号电压,但输出的最大电压值为VDD (2.7 到3.6V ),如果单片机外围5V 器件需要一个高于该VDD 的输入电压才能工作,那么为了提供一个比VDD 高的输入电压值,可将端口引脚的输出方式设置为“漏极开路”,并将输出端通过一个上拉电阻接到5V 电源。
此时,C8051F040的逻辑‘1’输出将被提升到5V ,而逻辑‘0’为地电平。
主从处理器间的数据交换采用双端口RAM 方式,双端口RAM 具有两组数据总线和地址总线,因而主从处理器可以同时访问共享其内部的数据存储器。
本系统选用IDT 公司的异步高速双端口RAMIDT70v05,存储器资源为8Kx8b,3.3V 电压供电,它具有中断、仲裁、扩展以及旗语通讯等逻辑功能,允许两个控制器同时读取任何存储单元(包括同时读同一地址单元),但不允许同时写或一读一写同一地址单元。
主从处理器与IDT70v50之间皆采用中断方式完成对存储单元中数据的读写任务。
IDT70v50的数据位宽为8位,当它与具有32位数据宽度的DSP 进行数据交换时,采用DSP 数据总线的低8位与双口RAM 的数据总线相连。
DSP 发送32位数至双口RAM 时,单字发送任务分四次进行,先发低8位,再利用移位指令依次发送高24位。
DSP 从双口RAM 中读取数据操作和发送时类似。
光纤陀螺仪信号以三路串口形式输出,C8051F040只有2个异步串行口,需要进行串口扩展。
加速度计组件输出为6路脉冲信号,由于导航算法要求对各惯性器件输出的信号进行同时采集,因此多路脉冲信号采集器中各路计数器启动后,在每个采集时刻到来时,必须先将采集器中的所有计数器的计数值同时锁存(即实现了同时采集),然后再分时读出已被锁存的计数值。
采用两片Intel8254可实现加速度计信号采集,Intel8254内含3个16位计数器,它的读回命令控制字可使三个计数器的计数值同时锁存而不影响正在进行的计数过程,通过硬件译码实现两片Intel8254芯片上6路计数器的同时锁[]6存。
C8051F040内部集成有BOTSHCAN,它兼容CAN 技术规范2.0A 和2.0B,主要由CAN 内核、消息RAM(独立于CIP-51的RAM )、消息处理单元和控制寄存器组成。
CAN 的输出输入必须加总线收发器才能与CAN 物理总线相连。
本系统采用TJA1050高速CAN 收发器,它具有电磁辐射低、防短路、不上电时对总线无影响等特点,有高速或静音两种模式。
为了增加CAN 节点的抗干扰能力,将CAN引脚通过高速光耦与总线收发器相连,可实现各节点之间的电气隔离。
系统硬件框图如图32.3实时操作系统应用当系统处理的任务较多,编程头绪也多,为了简化应用程序的编写思路,实现程序模块化,方便系统功能的扩充,提高应用程序的实时性和可靠性,将实时操作系统移植到本系统中就成为一件很有意义的事。
实时操作系统μCOS -Ⅱ是广泛应用的、源码公开的嵌入式实时操作系统,它能成功地移植到各种16位、32位单片机上,也能移植到8位单片机应用系统中。
该操作系统具有执行效率高、占用空间小、实时性能优良、可扩展性强、可剪裁等特点,最小内核可编译至2KB,适合小型控制系统。
C8051F040微控制器4KB的数据空间,满足μCOS-Ⅱ对硬件堆栈的要求,在理解了处理器和编译器的技术细节后,系统的移植只需要修改和处理器相关的代码。
2.4导航计算机的软件组成系统软件主要分两部分:1)系统模块:接收外部IMU 部件的数据采集信息,然后转换成系统要求可用的信息;与DSP- 5 -间的数据交换;与上位机的CAN总线通信,主要完成姿态信息的发送和初始位置等信息的接收。
2)导航模块:包括初始对准、姿态转换和更新、导航算法、误差补偿等子模块。
主要任务是实现捷联算法,产生导航要求的数据。
3.结论本文就分布式姿态基准系统以及本系统中捷联导航计算机的实现方案进行了讨论。