西安交大自控平台与系统
电力拖动自动控制系统-学习指南 西交大考试题库及答案

电力拖动自动控制系统-学习指南选择题1.在三相桥式反并联可逆调速电路和三相零式反并联可逆调速电路中,为了限制环流,需要配置环流电抗器的数量分别是(D )。
A 、1个和2个B 、2个和1个C 、2个和4个D 、4个和2个2.交流异步电动机采用调压调速,从高速变到低速,其转差功率(B )。
A 、不变B 、全部以热能的形式消耗掉了C 、大部分回馈到电网中3.常用的数字滤波方法不包括(D )。
A 、算术平均值滤波B 、中值滤波C 、中值平均滤波D 、几何平均值滤波4.转速电流双闭环调速系统中电流调节器的英文缩写是(A )。
A 、ACRB 、AVRC 、ASRD 、ATR5.转速—电流双闭环不可逆系统正常稳定运转后,发现原定正向与机械要求的正方向相反,需改变电机运行方向。
此时不应(C )。
A 、调换磁场接线B 、调换电枢接线C 、同时调换磁埸和电枢接线D 、同时调换磁埸和测速发电机接线6.一个设计较好的双闭环调速系统在稳态工作时(C )。
A 、两个调节器都饱和B 、两个调节器都不饱和C 、ST 饱和,LT 不饱和D 、ST 不饱和,LT 饱和7.带二极管整流器的SPWM 变频器是以正弦波为逆变器输出波形,是一系列 的( A )矩形波。
A 、幅值不变,宽度可变B 、幅值可变,宽度不变C 、幅值不变,宽度不变D 、幅值可变,宽度可变8.绕线式异步电动机双馈调速,如原处于低同步电动运行,在转子侧加入与转子反电动势相位相同的反电动势,而负载为恒转矩负载,则(B )。
A 、10<<S ,输出功率低于输入功率B 、0<S ,输出功率高于输入功率C 、10<<S ,输出功率高于输入功率D 、0<S ,输出功率低于输入功率9.自控系统开环放大倍数(C )。
A 、越大越好B 、越小越好C 、在保证系统动态特性前提下越大越好10.异步电动机VVVF 调速系统的机械特性最好的是( C )。
A 、恒11ωU 控制B 、恒1ωg E 控制C 、恒1ωr E 控制D 、恒11ωI 控制11.开环自控系统在出现偏差时,系统将(A )。
西安交通大学校园一卡通建设方案

西安交通大学校园一卡通建设方案西安交通大学网络中心二0一三年六月第一部分项目建设内容1、项目简介西安交通大学是教育部直属的重点大学,是首批进入国家“985/211工程”建设的九所大学之一,也是国家以建设世界知名高水平大学为建设目标的高校之一。
学校现有三个校区,占地面积近4000亩。
校园一卡通各类应用将实施于三个校区。
近年来,学校信息化建设按照数字校园平台支撑各类应用系统(MIS)这种松耦合模式由网络中心建设数字校园平台,各部门为主建设部门MIS 系统。
其中,于2007年建成的校园一卡通平台也是基于学校的数字校园平台建设。
目前使用的校园一卡通平台完全达到了与数字校园平台关联紧密、MIS系统易接入、应用种类多、服务校务管理等多项特点。
目前,该平台即将全面更新改造,以满足学校不断发展的需要。
应标方首先需要在应标书中描述:如何通过本项目分年度建设,能够建设出达到或者基本达到国内一流或者世界知名高水平大学应该具备的一卡通平台?同时需要以服务师生、服务校务管理、服务数字校园为目标,提出在本次项目建设中的在国内高校里面所达到的新高度。
1.1 系统概况西安交通大学自2007年开始建设校园一卡通系统,采用了飞利浦标准的M1 S70卡,成功于2007年8月投入使用,至今已近6年。
通过校园一卡通系统的建设,实现了校内“以卡代币”的各种金融消费支付功能和“以卡代证”的各种身份识别功能,并且结合学校的各种个性化管理需求,量身定制开发了多种管理类应用系统。
校园一卡通系统的建设在丰富了西安交通大学信息化建设内容的同时,为校内学生、教职员工、校友和家属的学习、工作、科研和生活提供了极大的便利,并且实现了财务的集中管理,从一定程度上提高了管理效率。
经过6年来的持续建设,西安交通大学校园一卡通系统目前已经建成并投入使用的主要系统如下表所示:1.2 学校需求背景(1)设备需要更新随着西安交通大学一卡通系统应用的持续深入的推广建设,新需求、新业务不断涌现,西安交通大学校园一卡通系统变得越来越庞大,系统帐户容量和业务流水不断扩张,使得数据库容量激增,原有服务器和存储连续在线工作近6年,使得基础环境运算性能下降、设备故障率增加。
西工大、西交大自动控制原理 第二章 控制系统的数学模型_2

5 比较点的移动 比较点的前移:
Rs
Cs
Rs
Cs
Gs
Gs
Qs
1 Qs
Gs
若要将比较点由方框后移至方框的前面,为保持信号 的等效,要在移动后的信号线上加入一个比较点所越 过的方框的倒数。
5 比较点的移动 比较点的后移:
Rs
Cs Gs
Rs Gs
Cs
Qs
Qs
G(s)
若要将比较点由方框前移至方框的后面,为保持信号的 等效,要在移动后的信号线上加入一个比较点所越过的 方框。
2-3 控制系统的结构图与信号流图
控制系统的结构图概述
控制系统的结构图(block diagram)是描述系统各元部 件之间信号传递关系的数学图形,表示了系统中各变量 间的因果关系以及对各变量所进行的运算。通过对系统 结构图进行等效变换(equivalent transform)后,可 求出系统的传递函数。
G1(s)
-1 H(s)
R(s)=0
f
(s)
C(s) F(s)
G2 ( s) 1 G2 (s)H (s)(1)G1(s)
G2 ( s) 1 G2 (s)G1(s)H (s)
G2(s) G2(s) 1 G(s)H(s) 1 Gk (s)
单位反馈系统H(s)=1,有
f
(s)
C(s) F(s)
若令:G(s) G1(s)G2(s) 为前向通路传递函数,
则:
B(s)
Gk (s) (s) G(s)H(s)
可见:系统开环传递函数Gk(s)等于前向通路传递函 数G(s)=G1(s)G2(s)与反馈通道传递函数H(s)的乘积。
R(S) ε(s) G1(s)
F(s)
03(国发平台)国控重点污染源自动监控系统V3.0版操作手册
国控重点污染源自动监控系统操作手册3.0版国控重点污染源自动监控系统操作手册西安交大长天软件股份有限公司2013年3月操作手册 (I)第一章概述 (1)1.1系统目标 (3)1.2系统功能 (4)1.3功能模块 (5)第二章系统登录 (6)2.1启动登录系统 (6)2.2进入系统 (6)2.3退出系统 (8)第三章页面布局及控件介绍 (9)3.1页面布局 (9)3.2控件介绍 (11)3.3图标介绍 (13)第四章总体预览 (15)4.1数据完整性 (15)4.1.1功能说明 (15)4.1.2操作说明 (15)4.2报警统计 (16)4.2.1功能说明 (16)4.2.2操作说明 (16)4.3数据审核情况 (18)4.3.1功能说明 (18)4.3.2操作说明 (18)4.4设备审核情况 (19)4.4.1功能说明 (19)4.4.2操作说明 (19)4.5设备验收情况 (21)4.5.1功能说明 (21)4.5.2操作说明 (21)4.6污染物超标T OP10 (23)4.6.1功能说明 (23)4.6.2操作说明 (23)4.7重点污染物超标情况 (24)4.7.1功能说明 (24)4.7.2操作说明 (24)4.8通讯服务器连通情况 (25)4.8.1功能说明 (25)4.8.2操作说明 (25)4.9监控数据最新交换时间 ................................................................................................... 错误!未定义书签。
4.9.1功能说明........................................................ 错误!未定义书签。
4.9.2操作说明........................................................ 错误!未定义书签。
西安交大本科测控技术与仪器电类研究生方向
西安交大本科测控技术与仪器电类研究生方向
西安交通大学本科测控技术与仪器电类研究生方向主要涉及测控技术和仪器电类相关领域的深入研究和应用。
该方向的研究生将学习测控技术和仪器电方面的高级理论和实践技能,培养电子测量与仪器、自动控制与自动化装置以及测控软件研发等方面的能力。
研究生方向课程可能包括但不限于以下内容:
1. 信号与系统:学习信号处理理论、数字信号处理、系统建模与分析等内容;
2. 测量与检测技术:学习各种物理和电子测量技术、传感器原理和应用、仪器测试与校准等内容;
3. 仪器电路与设计:学习电子仪器的电路设计原理和方法、低噪声放大器、滤波器设计等内容;
4. 自动控制理论与应用:学习自动控制系统的理论、控制器设计和参数调节、系统建模与仿真等内容;
5. 电磁场与电磁波:学习电磁场理论、电磁波传播、天线理论与设计等内容;
6. 传感器与智能测控:学习传感器技术、智能测控系统设计与应用、嵌入式系统等内容。
研究生方向的毕业生可以在电子测量与仪器领域、自动控制与自动化装置领域、科研机构、高等教育、电子制造和信息技术等领域从事研究、开发和应用工作。
西安交大校园无线网络使用说明
西安交大校园无线网络使用说明一、什么是校园无线网络我校校园无线网络(XJTU_WLAN)向广大教职工提供教学区内和会议场所无线接入校园网服务,用户可以使用笔记本、手机、PDA 等设备接入校园无线网络,与现有的校园有线网络相比,无线网络可以便捷的、随时随地的接入校园网。
校园无线网络采用WEb/PORTAL 认证,通过账号口令认证即可接入校园无线网。
我校校园无线网支持802.11a、802.11g协议。
采用802.11g 协议的WLAN理论上可提供54M下行速率,实际使用中速率会受信号强弱、干扰、连接人数等的影响。
二、开通校园无线网账号需要什么条件根据我校无线网络建设情况,本期无线网络开通主要面向教学区内的教职工,并符合下列条件:1.有线校园网用户(拥有教学区内IP地址或有线网络账号)2.拥有校园网身份ID(NetID)三、如何开通校园无线网络账号校园无线网络账号采用网上自助申请的方式,首先要确保激活校园统一身份NetID,然后确保已有IP地址或校园上网账号。
无线账号名称使用NetID,口令自己设定。
申请方式可以选择网上自助办理,也可选择在网络中心用户服务室办理。
网上自助申请步骤(申请过程中有问题请拨打82667777咨询):1.登录校园网自助服务平台。
2.输入NetID及口令。
(NetID账号激活请访问,点击“用户账号激活”,再点击教工账号激活,然后按照提示完成激活,如果激活NetID时有问题请拨打82668827咨询)。
3.进入校园网自助服务平台,如果您名下有IP地址,点击申请校园无线网络,填写必要信息,选择一个IP地址捆绑到无线账号上,然后提交;如果您名下有个人上网账号,点击申请校园无线网络,填写必要信息,然后提交。
4.如果您使用的IP地址非个人申请,则首先需要IP所有者(申请人)登录,点击“IP地址管理”,找到您使用的IP地址,点击“修改信息”,输入使用人的NetID(必须保证NetID正确)及其它相关信息,提交,然后使用人按照步骤3申请。
智慧交大教务综合管理系统五篇

智慧交大教务综合管理系统五篇高校综合教务管理系统及行政管理系统简介一、技术构架图“数字校园”平台应用建构主义教育理论,参照教育部和国外主要教育技术规范和标准,基于.NETFRAMWORK2.0-3.5分布式应用程序构架,采用B/S网络计算模式,对“数字校园”支撑平台综合策划设计,并在系统上实现了三方面的有机结合。
本技术构架对于业务系统和IT系统的管理可以帮助实现业务目标;在业务目标和信息需求的一致说明的基础上,就业务系统优先级和相互依赖性作最优决策;快速灵活的实施新系统、改进系统以及获取支持业务创新的信息;技术的发展和采用受到业务优先权的影响不大。
信息体系结构设计组织信息的结构和用途,能根据组织的战略、战术和运营方面的要求对信息加以调整。
根据必需的业务系统,业务系统体系结构指导对信息结构化处理以满足业务系统的要求。
技术体系结构定义了整个信息系统中的技术环境和基础结构。
定义了基于所定义的技术的单个系统的“结构”。
较低的软件开发、支持和维护费用;更好的应用程序可移植性;改进的互操作性、更简单的系统和网络管理方式;可以跟高的解决诸如安全性之类的关键问题;系统组件的更新与更换更方便;升级到未来的构架成本最低、最方便。
减少IT基础结构的复杂性;使得现有IT基础结构投资产生最大的回报;增加了制作和购买IT解决方案的灵活性;降低了IT所有权费用和新投资的风险。
优先采用整体的观点,就是将整个学校的数字化教学与管理环境建设当作一个整体,而不是各个一堆分立系统的集合。
强调通过提供统一的接口、平台与工具,来将学校的各应用系统集成起来,形成一个有机的整体。
其次是层次化的观点,就是运用分层的思想,根据数字校园中各部分之间的关系,将数字校园划分为几个层次,通过定义不同层次之间的接口,来理顺各个系统之间的关系,简化整个系统的设计。
按照基于URP(UniverityReourcePlanning,大学资源计划)的数字校园模型进行设计,以保证数字校园的清晰结构,这种结构具有很好的可扩充性,这对于将来应用系统的扩充很好好处。
XAJTUDC-西安交大学虚拟校园使用说明
目录1. WEB端功能介绍 (1)1.1 地图操作 (1)1.2 日常信息服务 (1)1.3 校庆专题 (1)1.4 迎新活动 (2)1.5 活动信息发布 (2)1.6 空闲教室查询定位 (2)1.7 空闲会议室查询定位 (3)1.8 大型仪器设备管理 (3)1.9 校车路线查询 (3)1.10 应急演练功能 (3)1.11 西迁纪念馆室内建模展示 (4)1.12 图书馆室内建模展示 (4)1.13 校园三维浏览 (4)1.14 博物馆数字展品 (4)1.15 帮助系统 (5)2.移动端功能介绍 (5)2.1 地图操作 (5)2.2 功能菜单 (5)2.3 查询服务 (5)2.4 自定义兴趣点 (6)2.5 校园活动 (6)2.6 空闲教室 (6)2.7 大型仪器 (6)2.8 会议室服务 (7)2.9 校车路线 (7)2.10 校庆服务 (7)2.11 迎新服务 (7)2.12 检查更新 (8)2.13 意见建议 (8)3. 后台运维功能介绍 (8)3.1 首页 (8)3.2 设备管理 (9)3.3 接待点 (9)3.4 报到流程 (9)3.5 其他须知 (10)3.6 就业活动 (10)3.7 活动专题 (10)3.8 其他活动 (11)3.9 酒店安排 (11)3.10 版本信息 (11)3.11 意见建议 (11)3.12 自定义兴趣点 (12)3.13 用户管理 (12)4. 触屏端功能介绍 (13)4.1 自由浏览 (13)4.2飞行浏览 (13)4.3 建筑物查询 (13)4.4 系统控制 (14)5. 访问地址 (14)5.1 网站地址 (14)5.2 iPhone App下载地址 (14)5.3 iPad App下载地址 (14)5.4 Android App(手机版)下载地址 (14)5.5 Android App(平板版)下载地址 (14)5.6. 二维扫描码 (15)1. WEB端功能介绍1.1 地图操作地图常用的基本操作和地图的控制,主要包含3类的操作:a、地图基本操作(地图放大、缩小、漫游、全幅等);b、地图量算操作(距离量算、面积量算、高度量算);c、地图切换(校区切换、地图类型切换)。
西工大、西交大自动控制原理 第五节 线性系统的稳定性分析9-10

1.系统稳定性概念
线性控制系统的稳定性定义
设线性控制系统在初始扰动的影响 下,其过渡过程随着时间的推移逐渐衰 减并趋向于零,则称该系统渐进稳定(简 称稳定)。反之,若在初始扰动的影响下, 系统过渡过程随着时间的推移而发散, 则称系统为不稳定。
1.系统稳定性概念
线性控制系统的稳定性是系统自身的固有特性。 稳定与否和输入信号及初始偏差的大小无关。
若通过系统自身的调节作用, 使偏差最后 逐渐减小,系统又逐渐恢复到平衡状态, 那么, 这种系统便是稳定的。
1. 系统稳定性概念
c(t)
c(t)
扰动
O (a)
扰动
O t
t (b)
不稳定
稳定
1. 系统稳定性概念
大范围稳定: 不论扰动引起的初始偏差有多大,
当扰动取消后,系统都能够恢复到原有 的平衡状态。
试用Hurwitz判据判断系统的稳定性。
解:(1) 特征方程式的各项系数均大于0。 (2) 各阶Hurwitz行列式为:
D1 a1 1 0
D2
a1 a0
a3 1 a2 2
5 7 0
3
3、稳定判据(代数判据)
(1) Hurwitz稳定判据
a1 a3 a5 1 5 0 D3 a0 a2 a4 2 3 10 45 0
2线性系统稳定的充分必要条件
设线性系统在初始条件为零时,输入一个 理想单位脉冲信号 (t),这时系统的输出称为 脉冲过渡函数(或称脉冲响应)g (t)
若系统闭环传递函数为:
m
Φs
Cs Rs
M s N s
Kg
n1
s sj
s zi
i 1
s2 2ζ k ωk s ωk2
03(国发平台)国控重点污染源自动监控系统V3.0版操作手册
国控重点污染源自动监控系统操作手册3.0版国控重点污染源自动监控系统操作手册西安交大长天软件股份有限公司2013年3月操作手册 (I)第一章概述 (1)1.1系统目标 (3)1.2系统功能 (4)1.3功能模块 (5)第二章系统登录 (6)2.1启动登录系统 (6)2.2进入系统 (6)2.3退出系统 (8)第三章页面布局及控件介绍 (9)3.1页面布局 (9)3.2控件介绍 (11)3.3图标介绍 (13)第四章总体预览 (15)4.1数据完整性 (15)4.1.1功能说明 (15)4.1.2操作说明 (15)4.2报警统计 (16)4.2.1功能说明 (16)4.2.2操作说明 (16)4.3数据审核情况 (18)4.3.1功能说明 (18)4.3.2操作说明 (18)4.4设备审核情况 (19)4.4.1功能说明 (19)4.4.2操作说明 (19)4.5设备验收情况 (21)4.5.1功能说明 (21)4.5.2操作说明 (21)4.6污染物超标T OP10 (23)4.6.1功能说明 (23)4.6.2操作说明 (23)4.7重点污染物超标情况 (24)4.7.1功能说明 (24)4.7.2操作说明 (24)4.8通讯服务器连通情况 (25)4.8.1功能说明 (25)4.8.2操作说明 (25)4.9监控数据最新交换时间 ................................................................................................... 错误!未定义书签。
4.9.1功能说明........................................................ 错误!未定义书签。
4.9.2操作说明........................................................ 错误!未定义书签。
西安交大操作系统原理课程作业答案

第一章操作系统引论1. 设计现代OS的主要目标是什么?方便性,有效性,可扩充性和开放性.2. OS的作用可表现为哪几个方面?a. OS作为用户与计算机硬件系统之间的接口;b. OS作为计算机系统资源的管理者;c. OS实现了对计算机资源的抽象.7. 实现分时系统的关键问题是什么?应如何解决?a. 关键问题:使用户能与自己的作业进行交互,即当用户在自己的终端上键入命令时,系统应能及时接收并及时处理该命令,再将结果返回给用户。
b. 解决方法:------对于及时接收,只需在系统中设置一多路卡,使主机能同时接收用户从各个终端上输入的数据;此外,还须为每个终端配置一个缓冲区,用来暂存用户键入的命令(或数据)。
------对于及时处理,应使所有的用户作业都直接进入内存,并且为每个作业分配一个时间片,允许作业只在自己的时间片内运行,这样在不长的时间内,能使每个作业都运行一次。
12. 试在交互性,及时性和可靠性方面,将分时系统与实时系统进行比较.a. 分时系统是一种通用系统,主要用于运行终端用户程序,因而它具有较强的交互能力;而实时系统虽然也有交互能力,但其交互能力不及前。
b. 实时信息系统对实用性的要求与分时系统类似,都是以人所能接收的等待时间来确定;而实时控制系统的及时性则是以控制对象所要求的开始截止时间和完成截止时间来确定的,因此实时系统的及时性要高于分时系统的及时性。
c. 实时系统对系统的可靠性要求要比分时系统对系统的可靠性要求高。
13. OS具有哪几大特征?它的最基本特征是什么?a. 并发性、共享性、虚拟性、异步性。
b. 其中最基本特征是并发和共享。
(最重要的特征是并发性)18. 是什么原因使操作系统具有异步性特征?在多道程序环境下允许多个进程并发执行,但由于资源等因素的限制,进程的执行通常并非一气呵成,而是以走走停停的方式运行。
内存中的每个进程在何时执行,何时暂停,以怎样的速度向前推进,每道程序总共需要多少时间才能完成,都是不可预知的,因此导致作业完成的先后次序与进入内存的次序并不完全一致。
西安交大自控实验报告
自控实验报告实验人:实验目的:1.熟悉MATLAB函数指令和SimuLink仿真环境;2.掌握控制系统建模与仿真的基本方法。
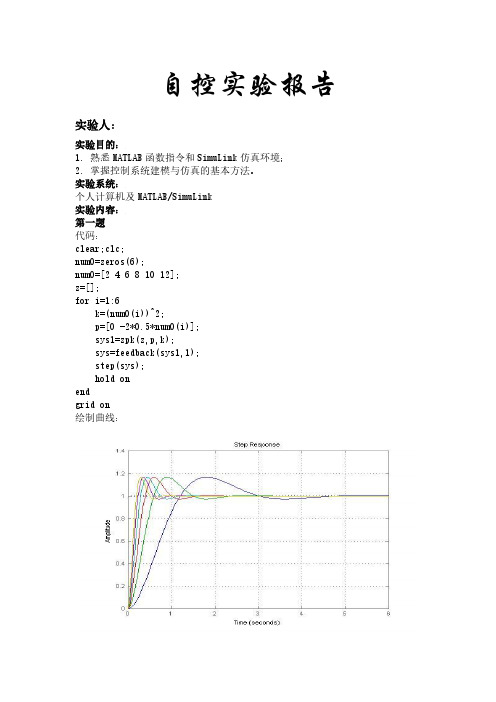
实验系统:个人计算机及MATLAB/SimuLink实验内容:第一题代码:clear;clc;num0=zeros(6);num0=[2 4 6 8 10 12];z=[];for i=1:6k=(num0(i))^2;p=[0 -2*0.5*num0(i)];sys1=zpk(z,p,k);sys=feedback(sys1,1);step(sys);hold onendgrid on绘制曲线:自然振荡频率变化的影响:自然振荡频率越大,振荡过程衰减的越快,稳定时间越短。
第二题:代码:clear;clc;k1=-4.2;%-4.2num=[2 -6.4 6];den=[1 k1 3.8];[z,p,k]=tf2zp(num,den);sys=zpk(z,p,k);impulse(sys);grid on绘制曲线k=4.2K=-4.2比较:第三题:代码:clear;clc;k=147.3;z=[];p=[(-10-sqrt(-44))/2,(-10+sqrt(-44))/2,(-2-sqrt(-16))/2,(-2+sqrt(-16))/2];sys=zpk(z,p,k);step(sys);grid onhold onclear;k=147.3;z=-1.5;p=[(-10-sqrt(-44))/2,(-10+sqrt(-44))/2,(-2-sqrt(-16))/2,(-2+sqrt(-16))/2,-1.7];sys=zpk(z,p,k);step(sys);grid on绘制图像:第四题:第五题:代码:clear;clc;s=tf('s');G1=1/s;G2=(s+1)/(0.2*s^2+s); H=1;Gc=feedback(G2*G1,H); pzmap(Gc);绘制图像:稳态误差为:ess=2第六问:第七问:(1,2题中选第1题)代码:clear;clc;s=tf('s');s1=tf(2,[30 1]);[num,den]=pade(10,2);s2=tf(num,den);Gs=s1*s2;%PKp1=1.5;Td1=0;N=10;Gc1=Kp1*(1+Td1*s/((Td1/N)*s+1));%PIKp2=1.35;Ti1=33;Td2=0;N=10;Gc2=Kp2*(1+1/Ti1/s+Td2*s/((Td2/N)*s+1)); %PIDKp=1.8;Ti=20;Td=5;N=10;Gc3=Kp*(1+1/Ti/s+Td*s/((Td/N)*s+1));%control systemsys1=Gc1*Gs;sys1new=feedback(zpk(sys1),1); step(sys1new);hold onsys2=Gc2*Gs;sys2new=feedback(zpk(sys2),1); step(sys2new);hold onsys3=Gc3*Gs;sys3new=feedback(zpk(sys3),1); step(sys3new);hold ongrid on绘制图像:第八问:(3,4题中选第题)。
索南加乐西安交大

目录
• 引言 • 索南加乐在西安交大的学术经历 • 索南加乐在西安交大的教学经历 • 索南加乐在西安交大的社会影响 • 索南加乐在西安交大的交流与合作 • 对未来发展的展望与期待
01 引言
目的和背景
介绍索南加乐教授及 其在西安交通大学的 研究工作
探讨索南加乐教授的 研究成果对电力系统 保护及控制领域的贡 献和影响
THANKS FOR WATCห้องสมุดไป่ตู้ING
感谢您的观看
提出并发展了电力系统故障分析 与继电保护的新原理和新技术, 为提高电力系统的安全稳定运行
水平做出了重要贡献。
在智能电网保护与控制领域取得 了多项创新性成果,推动了该领
域的技术进步和产业发展。
培养了一大批优秀的研究生和博 士生,为电力行业输送了大量高
素质人才。
科研项目与成果
主持了国家自然科学基金、国家重点研发计划等多项国家级和省部级科研项目,取 得了丰硕的研究成果。
学术带头人
作为西安交大电气工程学院的学术 带头人之一,索教授在学科建设、 人才培养和科研创新等方面发挥了 重要作用。
社会兼职与荣誉
担任多个学术职务
索南加乐教授担任了多个国内外 学术组织的职务,包括IEEE会员、 中国电机工程学会会员等,积极
参与学术交流与合作。
荣获多项奖励
索教授因其卓越的学术成就和贡 献,荣获了多项国家和省部级科 技奖励,包括国家科技进步奖、
索南加乐教授积极参与国际学术交流,与多个国际知 名大学和研究机构建立了合作关系。
索南加乐教授还参与了多个国际合作项目,为推动国 际学术交流做出了重要贡献。
与国内高校及科研机构的合作
索南加乐教授与国内多所高校 和科研机构保持着密切的合作 关系,共同开展科研项目。
西安交通大学科技成果——物联网智慧公路节能管控系统
西安交通大学科技成果——物联网智慧公路节能管控系统项目简介物联网智慧公路节能管控系统是集能耗监测与能耗管控于一体的智能化节能管理系统,针对各级公路、隧道照明节能管控效果尤为显著。
本系统采用先进的网络构建模式,搭建一个服务于各级公路隧道节能管控的平台,具有良好的稳定性、拓展性、实用性等。
物联网智慧公路节能管控系统,其结构主要包括:人机交互界面、业务逻辑、数据访问。
为了丰富界面展示效果,方案采用专业界面控件作为人机交互界面主要技术手段,该技术提供了一种在Web上体现强交互性的解决方案。
业务逻辑负责能耗数据的采集、处理、计算及前端监测/控制设备控制策略等工作。
数据访问提供对数据库的存储访问支持。
物联网隧道照明节能管控系统,即在隧道入口前500米通过微波车辆检测器、激光车辆检测器两种检测方式,准确检测有无车辆通过。
有车辆驶入时,服务器结合环境光传感器的实时采集数据及设置的相应数值,开关或调节入口加强照明段的照明设备,加强照明段的环境光传感器可检测照明设备的开关状态及效果。
隧道内布置激光车辆检测器,当车辆通过时,上传数据(信号)至服务器,用于进行本地和远程隧道照明控制。
隧道内分段布置物联网在线诊断系统,可实时监测路况信息、确认照明设备开关状态正确与否以及其他隧道内状况,便于远程管理和维护。
隧道入口处安装物联网人体感应器,当有人员进入时人体感应器内的红外传感器检测到信号,信号通过智能网关上传至云服务器。
云服务器根据控制策略自动下发指令至控制器进行照明回路的亮度调节及控制。
隧道内通风设施属于高能耗单元,可通过物联网节能设备灵活控制,达到设施设置目的并且同时达到节能目标。
当通过物联网在线诊断系统监控到隧道内有突发状况时,可以人工通过控制中心或者已授权的移动终端平台对照明及通风设施进行紧急控制。
主要硬件设备:物联网智能网关物联网控制器物联网人体感应器产品性能优势1、采用激光车辆检测器检测有无车辆(或计数),该设备抗干扰能力强,准确度高,从而实现最大限度的节能,减少浪费;2、隧道口采用环境光传感器,对加强照明进行无极调光控制,节能效果极佳;激光检测车辆控制照明开关和环境光传感器控制照明开关两种方式互相配合,可以更灵活、智能的对隧道内各种设施进行控制,为来往车辆提供舒适的隧道照明条件。
西工大、西交大自动控制原理 第八章 非线性系统_03_描述函数法_1描述函数
A3
[例1] 故:该非线性元件的描述函数为
N ( A) B1 jA1 1 3 A2 A 2 16
y
6
3
123 x
N ( A)
4 2
12345 A
二、应用描述函数法的基本假设条件
基本条件: 非线性环节正弦输入的响应输出高次谐波可忽略
基本条件成立的条件:
A 经结构图等效变换,非线性系统可简化成如下典型结构
在线性环节和非线性环节两种情况下的输出。
1、描述函数定义
设其输入为正弦函数,即:x(t) Asint
则其输出 y(t) 为非正弦周期函数,
对非正弦周期函数 y(t) ,可以展开成傅立叶级数:
y(t) A0 ( An cos nt Bn sin nt) A0 Yn sin(nt n )
1
arcsin
h A
,
2
arcsin mh , A
y(t) 为奇对称函数,但非奇函数,有 A0 0
因其在一个周期内对称:
A1
2
2 M costdt 2Mh (m 1)
1
A
2
B1
2
M
sintdt
2M
Hale Waihona Puke 11 mh2
A
1
h
2
A
五、典型非线性特性的描述函数
死区滞环继电非线性环节特性的描述函数
)2
1
五、典型非线性特性的描述函数
死区(不灵敏区)特性的描述函数
负倒特性
1 N ( A)
2K
2
sin1(
a ) A
a A
1
(
a A
)2
1
当 A a时
西工大、西交大自动控制原理 第六节 线性系统的稳态误差计算11-12

G2 s Cs
e
s
BERsss
1
1
GH1 ssG2
s
H
s
ef
s
Es F s
1
G2 sH s G1sG2 sH
s
1. 误差与稳态误差
稳态误差的计算
第六节 线性系统的稳态误差计算
Es Er s E f s e sRs ef sF s
1
G1
s
1
G2
s
H
s
Rs
1
G2 sH s G1sG2 sH
;e() R / K
▪ 对Ⅲ型以上系统v 3 ,K a ;e() 0
第六节 线性系统的稳态误差计算
2.用静态误差系数法求稳态误差
系 静态误差 阶跃输入 斜坡输入
统 系数 型 别
R 1t Rt
位置误差 速度误差
K
p
Kv
Ka
ess
R
(1 K p )
ess
R Kv
0K 00 R
1 K
Ⅰ K0 0
2.用静态误差系数法求稳态误差
静态加速度误差系数 K a
定义: Ka
lim
s0
s
2GK
s
lim
s0
s
2Gk
0
s
lim
s0
K sv2
e R R
lim
s0
K s 2
Ka
“加速度误差”
▪ ▪ ▪
对0型系统 对Ⅰ型系统 对Ⅱ型系统
v0
v 1 v2
,,K, KKaaa
0
0 K
;e() ;e()
第六节 线性系统的稳态误差计算
西安交大操作系统实验报告

西安交通大学操作系统专题实验报告班级:学号:姓名:2022年4月25日目录1内核编译与系统调用 (1)1.1实验目的 (1)1.2实验内容 (1)1.3实验思想(或流程图) (1)1.4实验步骤 (1)1.5测试数据设计 (3)1.6程序运行初值及运行结果分析 (3)1.7实验总结 (4)1.7.1实验中的问题与解决过程 (4)1.7.2实验收获 (5)1.7.3意见与建议 (5)1.8附件 (5)1.8.1附件1 程序 (5)1.8.2附件2 MakeFile (8)1.8.3附件3 Readme (8)2 进程软中断与管道通信 (13)2.1实验目的 (13)2.2实验内容 (13)2.3实验思想(或流程图) (13)2.4结果分析 (15)2.5实验总结 (16)2.6源代码 (17)3 模块编程与字符设备驱动 (20)3.1实验目的 (20)3.2实验内容 (20)3.3实验总结 (21)3.4附件 (22)1内核编译与系统调用1.1实验目的掌握系统调用的设计过程,为以后设计更复杂系统奠定基础。
1.2实验内容安装Linux,熟悉Linux的操作,并编译内核,构建、使用自己的Linux内核设计系统调用:设计、添加自己的系统调用,并重新编译内核予以验证为Linux内核设计添加一个系统调用,将系统的相关信息(CPU型号、操作系统的版本号、系统中的进程等,类似于Windows的任务管理器)以文字形式列表显示于屏幕,并编写用户程序予以验证。
请参阅proc文件系统的相关说明,读取proc文件系统的相关信息,可参考实验指导书的proc编程实验1.3实验思想(或流程图)系统调用是应用程序和操作系统内核之间的功能接口,其主要目的使用户可以使用操作系统提供的有关设备管理、输入/ 输出系统、文件系统和进程控制、通信以及存储管理等方面的功能 ,而不必了解系统程序的内部结构和有关硬件细节,从而起到减轻用户负担和保护系统以及提高资源利用率的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NI ELVISⅡ多功能虚拟仪器综合实验平台NI ELVISⅡ多功能虚拟仪器综合实验平台是一个多功能地数据采集实验平台如图2-1所示,它地核心是一个集成了8路差分输入<或16路单端输入)模拟数据采集通道<最高采样率1.25MS/s)、2路模拟信号输出、24路数字I/O通道、两路计数器通道地USB接口多功能数据采集卡,同时又集成了+/-15V和5V固定电源以及12种常用地虚拟仪器,包括示波器、数字万用表、函数发生器、可变电源、波特图分析仪、任意波形发生器、动态信号分析仪等.ELVIS通过面包板地方式将数据采集卡和各种仪器地接口引出,方便接线,并且为综合创新设计型实验留有足够地开发空间.ELVIS通过USB接口连接PC机,连接简单且便于调试,图2-2标示出NI ELVISⅡ实验板上通道接口地布局.
图2-1 NI ELVIS多功能虚拟仪器综合实验平台
b5E2RGbCAP 图2-2 NI ELVIS 实验板地通道接口地布局
1.常用地几种虚拟仪器
图2-3 NI ELVISⅡ12种虚拟仪器软面板地启动选择界面
图2-3是NI ELVISⅡ12种虚拟仪器软面板地启动选择界面,在自动控制原理实验中,主要用到地虚拟仪器包括函数发生器FGEN 、可变电源VPS 、示波器Scope 、伯德图分析仪Bode 等.p1EanqFDPw <1)函数发生器FGEN
通过ELVIS Instruments Launcher 地FGEN 按钮可以打开自带地函数发生器软面板,进而可以通过ELVIS 底座上地FGEN BNC 接口或者ELVIS 自带实验板上地FGEN 端口输出正弦波、方波或三角波.如图2-4所示,通过软面板上对应地图标可以选择产生相应地波形,同时可对频率、幅度<峰峰值)、直流偏置等参数进行设置.对于方波
AI
示波器PFI
电源、波形发生器、自定义I/O 、AO 、 DMM
信号,还可以选择占空比.此外还可选择AM或FM调制信号.利用函数发生器软面板也可以产生扫频信号,可以设置扫频地起始频率、最终频率、每一步地频率增量及时间.DXDiTa9E3d
在使用函数发生器时,需要注意地是,由于输出信号有两种可能地路由方式<通过ELVIS底座上地FGEN BNC接口或者ELVIS自带面包板上地FGEN端口),在使用时要根据实际地接线方式对软面板地Signal Route下拉菜单进行正确地设置.RTCrpUDGiT
图2-4 函数发生器软面板与 ELVISⅡ上地函数发生器手动调节旋钮在函数发生器软面板地左下方还有一个Manual Mode选项框,如果勾选此选项,则软面板上地幅度和频率设置将失效,取而代之地是ELVIS底座右方地Amplitude和Frequency旋钮,此时可通过手动旋转这两个旋钮地方式来调整产生波形地幅度和频率,同时ELVIS底座右方FUNCTION GENERATOR部分地Manual Mode指示灯会点亮.5PCzVD7HxA
ELVIS自带地函数发生器与模拟信号输出<AO)功能在硬件上是各自独立地,因此可以同时使用.
使用函数发生器时,在接线时要注意共地地问题.如果信号路由选择原型板<Prototyping Board)上地FGEN接口,其参考端是GROUND.jLBHrnAILg
<2)可变电源VPS
通过ELVIS Instruments Launcher地VPS按钮可以打开自带地可变电源软面板如图2-5所示,通过ELVIS实验板上左下方Variable Power Supply部分地Supply+和Supply-端口分别提供正电源和负电源.两路直流电源地幅度范围分别为0至12V以及0至-12V,正负两路输出电压可分别独立调节,其可提供地最大驱动电流为500mA,因此可以直接驱动一些小型地直流马达.xHAQX74J0X
图2-5 可变电源软面板与ELVISⅡ上地可变电源手动调节旋钮
利用ELVIS地可变电源软面板还可以对正电源或负电源单独进行扫描式地电压输出,可以设置扫描地起始电压、终止电压、每一步地电压步进值以及持续时间等参数.LDAYtRyKfE
在可变电源软面板上,正负两路可变电源电压设置地上方都有一个Manual Mode选项框,如果勾选此选项,则软面板上地输出电压设置将失效,取而代之地是ELVIS底座右方地两个Voltage旋钮,此时可通过手动旋转这两个旋钮地方式来调节正负两路可变电源地输出电压,同时ELVIS底座右方VARIABLE POWER SUPPLY部分地Manual Mode指示灯会点亮,如图2-5所示.Zzz6ZB2Ltk
使用可变电源时,同样应注意接线地共地问题.对于原型板地Supply+和Supply-端口,其参考端都是GROUND.dvzfvkwMI1
除了可变电源外,ELVIS还提供了一些固定电源可供使用,包括+15V、-15V以及+5V地固定电源.其中+15V和-15V与可变电源地驱动能力相同,都是500mA,而+5V固定电源地电流输出驱动能力为2A.rqyn14ZNXI
<3)示波器Scope
通过ELVIS Instruments Launcher地Scope按钮可以打开自带地示波器软面板如图2-6所示,允许同时对两路信号进行同步测量,测量信号既可以来自于ELVIS地两个示波器通道Scope CH 0和Scope CH1,也可以来自于其他8路差分模拟信号输入<AI)通道,通过Source下拉菜单可以选择具体地通道.对于型号ELVIS II+,示波器通道地最高采样速率可达100MS/s,8路差分模拟信号输入通道地最
高采样速率为1.25MS/s.ELVIS地示波器通道和模拟输入通道<AI)在内部硬件中占用各自独立地资源,因此可以同时使用.EmxvxOtOco
图2-6 示波器软面板
示波器软面板上地各种输入与传统示波器类似,用户可以在Basic Sttings页面中设置X和Y轴每格代表地电压或时间,也可以对触发方式进行设置.在Advanced Settings页面,用户还可以进一步设置两路信号地偏移量,以及是否启用20MHz滤波器.SixE2yXPq5
基于NI ELVISⅡ地自动控制原理实验系统
基于NI ELVISⅡ地自行开发地自动控制原理实验系统包含了六部分:系统时域特性分析,系统频域分析,系统时域稳定性分析,频率响应测试,系统校正设计与直流电机地建模与控制.6ewMyirQFL 通过点击主界面地实验工程选择进入相关实验.实验系统主界面如图2-13所示.
图2-13 基于NI ELVISⅡ地自动控制原理实验系统1.系统时域特性分析:利用运算放大器、电阻、电容、导线在ELVISⅡ面包板上搭建一阶、二阶、三阶等模拟系统,利用模拟量输出端口AO发出阶跃信号,通过模拟量输入端口采样系统地输入端与输出响应,获取系统地阶跃响应曲线,测量系统地时域特性指标,分析时域性能.系统时域特性曲线与测量如图2-14所示.kavU42VRUs
图2-14 系统时域特性分析
2.系统稳定性分析:观察与分析系统地开环放大系数与时间常数变化对系统性能地影响,如图2-15所示.
图2-15 系统稳定性分析
3.频率特性分析: 利用运算放大器、电阻、电容、导线在ELVISⅡ面包板上搭建一阶、二阶、三阶等模拟系统,通过模拟量输出端口AO发出频率变化地正弦信号,通过模拟量输入端口采样系统地输入端与输出响应,经运算绘制出系统地幅频与相频特性曲线,给出系统地频域特性指标.系统频域特性分析如图2-16所示.y6v3ALoS89
图2-16 系统频域特性分析
4.系统频率特性测试:利用运算放大器、电阻、电容、导线在ELVISⅡ面包板上搭建一阶、二阶模拟系统,应用ELVISⅡ地函数发生器手动调节输出正弦信号,通过模拟量输入端口侧量系统地输入端与输出响应,绘制出X-Y测量图;使用李萨育图形测量法,计算出系统地地幅值与相位,绘制出系统地幅频与相频特性曲线,如图2-17所示.M2ub6vSTnP
图2-17 频率特性测试
5.系统串联校正:根据系统参数,可以绘制出校正前系统阶跃响应线,给出频域性能指标,根据期望地相位裕度可设计出超前校正网络,绘制出校正后地系统阶跃响应线,且给出频域性能指标,如图2-18所示.0YujCfmUCw
图2-18 系统串联校正
6.直流电机建模与控制:直流电机系统建模与控制实验如图2-19所示,包括系统建模、电机速度控制与电机位置控制三部分.电机系统建模采用三种方式:1)利用电机阶跃响应建立系统模型;2)通过系统辨识工具包对系统建模;3)通过手动参数调节对系统建模.电机速度控制与位置控制实验包括控制器设计、控制仿真与对电机实际控制三部分.eUts8ZQVRd
图2-19 直流电机建模与控制。