PLC控制步进电机原理详图
PLC控制步进电机的实例(图与程序)

态已已
X已
源
个
·
源
X已
意已已已
个个
个
个
·
·
B善
·
B善
-控已已已 个个个 个 个个个 · ·F而状状大 F而状状-
个 ·V大 用ND ·源大 源- B大 B个
善D而V源在
善D而V相在 个
D明引成已
-意已已已在 X已
意已已已
D明引成已
已个
D明引成已
-意已已已在 X引
意已已已
B 意已已已
善
在 D明引成已
个
个 个个个
个 个
P程点
善
在个
个
·
善D而V源在
FX引脉
个
·FX P程点
引已已确画Z
个
·P程脉大 P程脉-
D相而大 D相而-
个
·
善D而V源在如
意态
D明引成已
D明引成已
个
·
X已
源
X引
B
善
在个
·
善
在个
·
个
·
D明引成已
善
在个
·意态
D明引成已
Y已
已已
D明引成已
-意已已已 个
·
源B
X引 善 点
在 D明引成已
步进电机PLC控制 (课堂用)课件
PPT学习交流
5
工作方式
步进电机的工作方式可分为:三相单三拍、三相单双六拍、 三相双三拍等。
一、三相单三拍 (1)三相绕组联接方式:Y 型 (2)三相绕组中的通电顺序为:
A相B相C相
通电顺序也可以为:
A 相 C 相 B 相
PPT学习交流
6
(3)工作过程
A
B' 1 C'
42
C 3B
A'
A 相通电,A 方向的
磁通经转子形成闭合回路。 若转子和磁场轴线方向原 有一定角度,则在磁场的 作用下,转子被磁化,吸
引转子,由于磁力线总是要通过磁阻最小的路径闭合, 因此会在磁力线扭曲时产生切向力而形成磁阻转矩, 使转子转动,使转、定子的齿对齐停止转动。
A 相通电使转子1、3齿和 AA' 对齐。
PPT学习交流
7
A
B'
• 环型分配器的功能: 主要是把外部CP端送 入的脉冲进行分配, 给功率放大器,功率 放大器相应的晶体管 导通,步进电机的线 圈得电。
PPT学习交流
12
三、三相双三拍
三相绕组的通电顺序为:
AB BC CA AB 共三拍。
A
B'
C'
C
B
A'
A
B'
C'
C
B
A'
AB通电
BC通电
PPT学习交流
13
A
B'
C'
C
B
A'
工作方式为三相双三拍 时,每通入一个电脉冲,
转子也是转30,即 S =
30。
CA通电
以上三种工作方式,三相双三拍和三相单双六拍较三 相单三拍稳定,因此较常采用。
PLC控制步进电机的方法 步进电机工作原理
PLC控制步进电机的方法步进电机工作原理一、引言微电子技术和计算机技术发展,可编程序控制器有了突飞猛进发展,其功能已远远超出了逻辑控制、顺序控制范围,它与计算机有效结合,可进行模拟量控制,具有远程通信功能等。
有人将其称为现代工业控制三大支柱(即PLC,机器人,CAD/CAM)之一。
目前可编程序控制器(Programmable Controller)简称PLC已广泛应用于冶金、矿业、机械、轻工等领域,为工业自动化提供了有力工具。
二、PLC基本结构PLC采用了典型计算机结构,主要包括CPU、RAM、ROM和输入/输出接口电路等。
把PLC看作一个系统,该系统由输入变量-PLC-输出变量组成,外部各种开关信号、模拟信号、传感器检测信号均作为PLC输入变量,它们经PLC外部端子输入到内部寄存器中,经PLC内部逻辑运算或其它各种运算、处理后送到输出端子,它们是PLC输出变量,由这些输出变量对外围设备进行各种控制。
三、控制方法及研究1、FP1特殊功能简介(1) 脉冲输出FP1输出端Y7可输出脉冲,脉冲频率可软件编程进行调节,其输出频率范围为360Hz~5kHz。
(2) 高速计数器(HSC)FP1内部有高速计数器,可同时输入两路脉冲,最高计数频率为10kHz,计数范围-~+。
(3) 输入延时滤波FP1输入端采用输入延时滤波,可防止因开关机械抖动带来不可靠性,其延时时间可需要进行调节,调节范围为1ms~128ms。
(4) 中断功能FP1中断有两种类型,一种是外部硬中断,一种是内部定时中断。
2、步进电机速度控制FP1有一条SPD0指令,该指令配合HSC和Y7脉冲输出功能可实现速度及位置控制。
速度控制梯形图见图1,控制方式参数见图2,脉冲输出频率设定曲线见图3。
图1 速度控制梯形图图2 控制方式参数东莞市斯泰普机电科技有限公司图3 脉冲输出频率设定曲线3、控制系统程序运行图4 控制系统原理图图4是控制系统原理接线图,图4中Y7输出脉冲作为步进电机时钟脉冲,经驱动器产生节拍脉冲,控制步进电机运转。
PLC如何控制步进电机
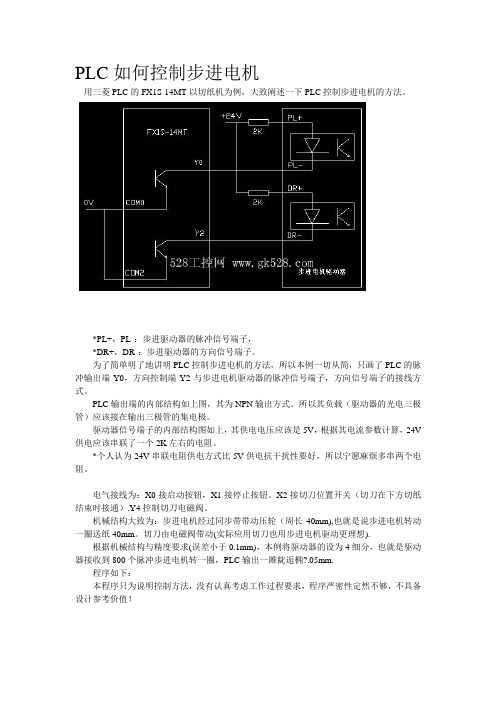
PLC如何控制步进电机用三菱PLC的FX1S-14MT以切纸机为例,大致阐述一下PLC控制步进电机的方法。
*PL+,PL-:步进驱动器的脉冲信号端子,*DR+,DR-:步进驱动器的方向信号端子。
为了简单明了地讲明PLC控制步进电机的方法,所以本例一切从简,只画了PLC的脉冲输出端Y0,方向控制端Y2与步进电机驱动器的脉冲信号端子,方向信号端子的接线方式。
PLC输出端的内部结构如上图,其为NPN输出方式。
所以其负载(驱动器的光电三极管)应该接在输出三极管的集电极。
驱动器信号端子的内部结构图如上,其供电电压应该是5V,根据其电流参数计算,24V 供电应该串联了一个2K左右的电阻。
*个人认为24V串联电阻供电方式比5V供电抗干扰性要好,所以宁愿麻烦多串两个电阻。
电气接线为:X0接启动按钮,X1接停止按钮。
X2接切刀位置开关(切刀在下方切纸结束时接通).Y4控制切刀电磁阀。
机械结构大致为:步进电机经过同步带带动压轮(周长40mm),也就是说步进电机转动一圈送纸40mm。
切刀由电磁阀带动(实际应用切刀也用步进电机驱动更理想).根据机械结构与精度要求(误差小于0.1mm),本例将驱动器的设为4细分,也就是驱动器接收到800个脉冲步进电机转一圈,PLC输出一雎龀逅椭?.05mm.程序如下:本程序只为说明控制方法,没有认真考虑工作过程要求,程序严密性定然不够,不具备设计参考价值!第0步:设定基底速度120转/分(一转800个脉冲,1600HZ就是每秒2转),加速时间100ms,最高速度600转/分(一转800个脉冲,8000HZ就是每秒10转)。
HZ(赫兹)是频率单位,每秒PLC输出的脉冲个数。
第20步,22步:启动,停止操作。
T0的延时有防干扰作用,停止按钮(X1)闭合时间不到100毫秒无效。
20步的启动按钮应该再串联一个触点,防止再运行过程中按启动按钮,M0置位。
(懒得改程序了)第26步:按停止按钮不是立刻停止,而是用M1来达到完成一个过程后再停止(送纸后,切刀完成再停止)第29步:本例送纸40mm,送纸电机速度600转/分,送纸结束M8147断开置位M2,开始切纸过程。
plc控制步进电机工作原理

plc控制步进电机工作原理PLC控制步进电机的工作原理步进电机是一种按照一定规律逐步转动的电动机,其中每步转动一个固定角度。
PLC(可编程序逻辑控制器)作为一种专门用于自动化控制的电子设备,常被用于控制步进电机,实现精确的位置控制。
步进电机的工作原理如下:首先,步进电机由多个电磁线圈组成,这些线圈的位置决定了电机的转子位置。
当电源施加在电磁线圈上时,线圈会产生磁场吸引或排斥磁性定子,从而使转子沿着一定的角度旋转。
步进电机有两种常见的驱动方式:单相驱动和双相驱动。
在单相驱动的步进电机中,每次只有一个线圈被激活,而在双相驱动的步进电机中,每次有两个线圈被激活。
PLC控制步进电机的工作原理如下:首先,PLC接收到外部的输入信号,例如传感器检测到的位置信息或其他触发信号。
PLC根据这些输入信号来判断步进电机应该转动到的位置。
PLC内部的逻辑控制程序会根据设定的运行模式和算法,生成驱动信号来控制步进电机。
这些驱动信号会通过PLC的输出端口发送给步进电机的驱动电路。
步进电机的驱动电路会根据驱动信号的频率和脉冲宽度来决定电机的转动方式和速度。
通常,每接收到一个驱动信号,步进电机就会转动一个固定的角度。
通过不断发送驱动信号,PLC可以准确地控制步进电机的转动角度和速度,从而实现精确的位置控制。
在实际应用中,PLC控制步进电机通常与其他传感器、开关和执行器等设备配合使用,形成一个自动化系统。
PLC不仅可以控制步进电机的转动,还可以根据不同的需求进行逻辑判断和与其他设备的数据交互,实现更复杂的控制功能。
总结起来,PLC控制步进电机的工作原理是通过接收外部输入信号、根据内部的逻辑控制程序生成驱动信号,控制步进电机的转动角度和速度,从而实现精确的位置控制。
PLC对步进电机的快速精确定位控制

PLC对步进电机的快速精确定位控制(附PLC原程序) 步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号时就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),其旋转以固定的角度运行。
可以通过控制脉冲个数来控制角位移量以达到准确定位的目的;同时也可以通过控制脉冲频率来控制电机转动的速度和加速度而达到调速的目的。
步进电机作为一种控制用的特种电机,因其没有积累误差(精度为100%)而广泛应用于各种开环控制。
1 定位原理及方案1.1 步进电机加减速控制原理步进电机驱动执行机构从一个位置向另一个位置移动时,要经历升速、恒速和减速过程。
当步进电机的运行频率低于其本身起动频率时,可以用运行频率直接起动并以此频率运行,需要停止时,可从运行频率直接降到零速。
当步进电机运行频率fb>fa(有载起动时的起动频率)时,若直接用fb频率起动会造成步进电机失步甚至堵转。
同样在fb频率下突然停止时,由于惯性作用,步进电机会发生过冲,影响定位精度。
如果非常缓慢的升降速,步进电机虽然不会产生失步和过冲现象,但影响了执行机构的工作效率。
所以对步进电机加减速要保证在不失步和过冲前提下,用最快的速度(或最短的时间)移动到指定位置。
步进电机常用的升降频控制方法有2种:直线升降频和指数曲线升降频。
指数曲线法具有较强的跟踪能力,但当速度变化较大时平衡性差。
直线法平稳性好,适用于速度变化较大的快速定位方式。
以恒定的加速度升降,规律简练,用软件实现比较简单,本文即采用此方法。
1.2 定位方案要保证系统的定位精度,脉冲当量即步进电机转一个步距角所移动的距离不能太大,而且步进电机的升降速要缓慢,以防止产生失步或过冲现象。
但这两个因素合在一起带来了一个突出问题:定位时间太长,影响执行机构的工作效率。
因此要获得高的定位速度,同时又要保证定位精度,可以把整个定位过程划分为两个阶段:粗定位阶段和精定位阶段。
粗定位阶段,采用较大的脉冲当量,如0.1mm/步或1mm/步,甚至更高。
plc项目5.3【plc-步进电机快慢控制】ppt课件

上
14
下
项目5.3
步进电机
●预备知识 ●工序要求 ●原理分析 ·关键点提醒 ●实操演示 ●实操任务单 ·实况点评 ●接线图 ●接线解剖图 ·接线回路 ●梯形图+表 ●程序录入 ●程序下传 ●故障1图解 ·第5章链接
Plc移位指令例
●步进电机梯形图程序的录入步骤
FXGP“梯形图”编程界面 文件 编辑 工具 视图 X1 基 母 线
程序
快/慢 K2 X2 态1 0 Y3
通
E
F
COM1 注:Y3[1态]→D相[通电]
(+)24V(-)
近
上
10
下
项目5.3
步进电机
●预备知识 ●工序要求 ●原理分析 ·关键点提醒 ●实操演示 ●实操任务单 ·实况点评 ●接线图 ●接线解剖图 ·接线回路 ●梯形图+表 ●程序录入 ●程序下传 ●故障1图解 ·第5章链接
Plc移位指令例
㈣PLC-步进电机实操步骤及演示
■接线、编程
1◇断电接线 .接线图 2◇编程 .梯形图 .接线回路 .下传演示 电脑
——断开电源开关,按照接线图,接好设备连线
实训器材 演示面板
.录入演示
——将梯形图程序,录入计算机,然后写到PLC
■调试(及故障分析)
.工序图
PLC台
1◇查验: PLC开机[RUN档], P1[按一下],步进电机[启动正转]? .故障1 图解分析 2◇查验:K2[合上]→电机[进2步/秒],K2[断开]→电机[进1步/秒]? 否:程序[错]
11
下
5.3
● 接 线 回 路
( 1 ) 含 故 障 图 解
返
A A 步进电机 相 E C 相 C
PLC如何控制步进电机
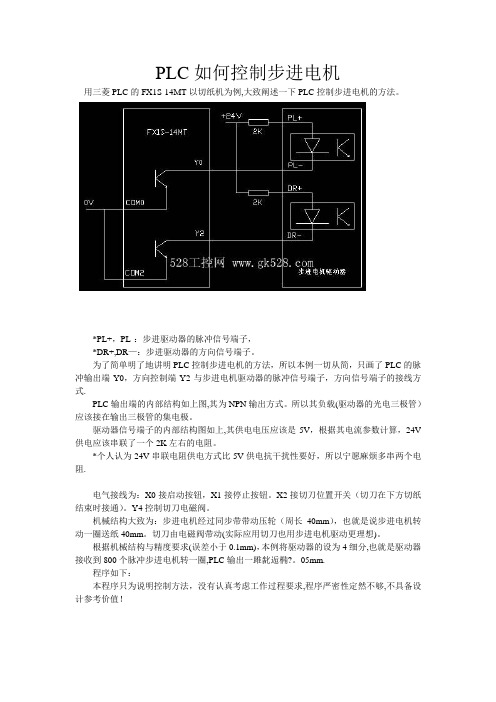
PLC如何控制步进电机用三菱PLC的FX1S-14MT以切纸机为例,大致阐述一下PLC控制步进电机的方法。
*PL+,PL-:步进驱动器的脉冲信号端子,*DR+,DR—:步进驱动器的方向信号端子。
为了简单明了地讲明PLC控制步进电机的方法,所以本例一切从简,只画了PLC的脉冲输出端Y0,方向控制端Y2与步进电机驱动器的脉冲信号端子,方向信号端子的接线方式.PLC输出端的内部结构如上图,其为NPN输出方式。
所以其负载(驱动器的光电三极管)应该接在输出三极管的集电极。
驱动器信号端子的内部结构图如上,其供电电压应该是5V,根据其电流参数计算,24V 供电应该串联了一个2K左右的电阻。
*个人认为24V串联电阻供电方式比5V供电抗干扰性要好,所以宁愿麻烦多串两个电阻.电气接线为:X0接启动按钮,X1接停止按钮。
X2接切刀位置开关(切刀在下方切纸结束时接通)。
Y4控制切刀电磁阀。
机械结构大致为:步进电机经过同步带带动压轮(周长40mm),也就是说步进电机转动一圈送纸40mm。
切刀由电磁阀带动(实际应用切刀也用步进电机驱动更理想)。
根据机械结构与精度要求(误差小于0.1mm),本例将驱动器的设为4细分,也就是驱动器接收到800个脉冲步进电机转一圈,PLC输出一雎龀逅椭?。
05mm.程序如下:本程序只为说明控制方法,没有认真考虑工作过程要求,程序严密性定然不够,不具备设计参考价值!第0步:设定基底速度120转/分(一转800个脉冲,1600HZ就是每秒2转),加速时间100ms,最高速度600转/分(一转800个脉冲,8000HZ就是每秒10转)。
HZ(赫兹)是频率单位,每秒PLC输出的脉冲个数。
第20步,22步:启动,停止操作。
T0的延时有防干扰作用,停止按钮(X1)闭合时间不到100毫秒无效。
20步的启动按钮应该再串联一个触点,防止再运行过程中按启动按钮,M0置位。
(懒得改程序了)第26步:按停止按钮不是立刻停止,而是用M1来达到完成一个过程后再停止(送纸后, 切刀完成再停止)第29步:本例送纸40mm,送纸电机速度600转/分,送纸结束M8147断开置位M2,开始切纸过程。
PLC控制步进电机脉冲信号发生器原理图及例程
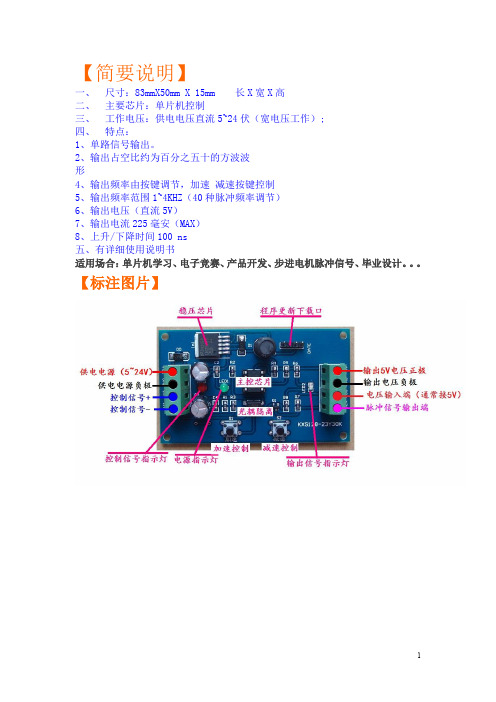
【简要说明】一、尺寸:83mmX50mm X 15mm 长X宽X高二、主要芯片:单片机控制三、工作电压:供电电压直流5~24伏(宽电压工作);四、特点:1、单路信号输出。
2、输出占空比约为百分之五十的方波波形4、输出频率由按键调节,加速减速按键控制5、输出频率范围1~4KHZ(40种脉冲频率调节)6、输出电压(直流5V)7、输出电流225毫安(MAX)8、上升/下降时间100 ns五、有详细使用说明书适用场合:单片机学习、电子竞赛、产品开发、步进电机脉冲信号、毕业设计。
【标注图片】【原理图】/********************************************************************汇诚科技使用芯片:STC15F104E晶振:33MHZ编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!*********************************************************************//********************************************************************/#include "reg52.h"#include <intrins.H>#define uchar unsigned char //宏定义字符型变量#define uint unsigned int //宏定义整型变量/********************************************************************寄存器设置*********************************************************************/ sfr IAP_DATA =0xc2; //数据寄存器sfr IAP_ADDRH =0xc3; //地址寄存器sfr IAP_ADDRL =0xc4; //地址寄存器sfr IAP_CMD =0xc5; //命令寄存器sfr IAP_TRIG =0xc6; //触发寄存器sfr IAP_CONTR =0xc7; //擦除寄存器/********************************************************************命令定义*********************************************************************/ #define CMD_IDLE 0 //EEPROM无操作#define CMD_READ 1 //读取字节#define CMD_PROGRAM 2 //写入字节#define CMD_ERASE 3 //擦除字节/********************************************************************编程周期由晶振决定*********************************************************************/ //#define ENABLE_IAP 0X80 //编程周期由晶振决定(如果<30MHZ选用此项)//#define ENABLE_IAP 0X81 //编程周期由晶振决定(如果<24MHZ选用此项)//#define ENABLE_IAP 0X82 //编程周期由晶振决定(如果<20MHZ选用此项) #define ENABLE_IAP 0X83 //编程周期由晶振决定(如果<12MHZ选用此项)//#define ENABLE_IAP 0X84 //编程周期由晶振决定(如果<6MHZ选用此项)//#define ENABLE_IAP 0X85 //编程周期由晶振决定(如果<3MHZ选用此项)//#define ENABLE_IAP 0X86 //编程周期由晶振决定(如果<2MHZ选用此项)//#define ENABLE_IAP 0X87 //编程周期由晶振决定(如果<1MHZ选用此项)#define IAP_ADDRESS 0X0000 //内部EEPROM地址/********************************************************************定义继输入输出*********************************************************************/ sbit JIA=P3^1; //sbit JIAN=P3^0; //sbit EN=P3^2; //sbit P35=P3^5; //bit write=0;/********************************************************************初始定义*********************************************************************/ uint tcnt1; //脉冲计数uint t1;bit write;uchar sudu;/********************************************************************延时100MS函数*********************************************************************/void Delay100ms(){uchar i, j, k;_nop_();i = 5;j = 144;k = 71;do{do{while (--k);} while (--j);} while (--i);}/********************************************************************操作函数*********************************************************************/ void IapIdle(){IAP_CONTR=0;IAP_CMD=0;IAP_TRIG=0;IAP_ADDRH=0X80;IAP_ADDRL=0;}/********************************************************************读取一个字节函数*********************************************************************/ uchar IapReadByte(uint addr){uchar dat;IAP_CONTR=ENABLE_IAP;IAP_CMD=CMD_READ;IAP_ADDRL=addr;IAP_ADDRH=addr>>8;IAP_TRIG=0X5A;IAP_TRIG=0XA5;_nop_();_nop_();_nop_();dat=IAP_DATA;IapIdle();return dat;}/********************************************************************写入一个字节函数*********************************************************************/void IapProgramByte(uint addr,uchar dat){IAP_CONTR=ENABLE_IAP;IAP_CMD=CMD_PROGRAM;IAP_ADDRL=addr;IAP_ADDRH=addr>>8;IAP_DATA=dat;IAP_TRIG=0X5A;IAP_TRIG=0XA5;_nop_();_nop_();_nop_();IapIdle();}/********************************************************************擦除一个字节函数*********************************************************************/void IapEraseSector(uint addr){IAP_CONTR=ENABLE_IAP;IAP_CMD=CMD_ERASE;IAP_ADDRL=addr;IAP_ADDRH=addr>>8;IAP_TRIG=0X5A;IAP_TRIG=0XA5;_nop_();_nop_();_nop_();IapIdle();}/********************************************************************按键判断函数*********************************************************************/void KEY(){if(JIA==0){Delay100ms();if(JIA==0){Delay100ms();sudu++;write=1;if(sudu>=37)sudu=37;while(!JI A);Delay100ms();}}if(JIAN==0){Delay100ms();if(JIAN==0){Delay100ms();sudu--;write=1;if(sudu<=1)sudu=1;while(!JI AN);Delay100ms();}}if(EN==0)TR0=1;else TR0=0;switch(sudu){case 1: t1=1;break;//2K case 2: t1=2;break;//1.6k case 3: t1=3;break;//1.33k case 4: t1=4;break;//2K case 5: t1=5;break;//1.6k case 6: t1=6;break;//1.33k case 7: t1=7;break;//1.14k case 8: t1=8;break;//1k case 9: t1=9;break;// 880 case 10: t1=10;break;// 800 case 11: t1=12;break;// 660 case 12: t1=14;break;// 580 case 13: t1=16;break;// 500 case 14: t1=18;break;// 450 case 15: t1=20;break;// 400 case 16: t1=22;break;// 360 case 17: t1=23;break;// 350 case 18: t1=26;break;// 300 case 19: t1=30;break;// 260 case 20: t1=33;break;// 240 case 21: t1=37;break;// 220 case 22: t1=41;break;// 200 case 23: t1=50;break;// 160 case 24: t1=60;break;// 135 case 25: t1=65;break;// 125 case 26: t1=75;break;// 110 case 27: t1=80;break;// 100 case 28: t1=95;break;// 84 case 29: t1=120;break;//60 case 30: t1=150;break;//50 case 31: t1=300;break;//30 case 32: t1=1000;break;//8 case 33: t1=10000;break;//1 case 34: t1=20000;break;//1 case 35: t1=30000;break;//1 case 36: t1=40000;break;//1 case 37: t1=60000;break;//1default:break;}}/********************************************************************定时中断服务函数*********************************************************************/ void t0(void) interrupt 1 using 0 //定时中断服务函数{tcnt1++;if(tcnt1>=t1){tcnt1=0;P35=!P35;}}/********************************************************************主函数*********************************************************************/ void main(){uchar Q;TMOD=0x02; //定时器工作在方式2TH0=0x06; //对TH0 TL0 赋值TL0=0x06;TR0=0; //关定时ET0=1; //开定时器EA=1; //开总中断P35=0;//脉冲输出脚Q=IapReadByte(0);sudu=Q;while(1){KEY();if(write==1){write=0;IapEraseSector(0); //擦除扇区IapProgramByte(0,sudu); //写入数据}}}/********************************************************************结束*********************************************************************/ 【应用举例】【产品展示】。
步进电机PLC控制ppt课件

知识目标
1.能给出步进电机控制系统的 功能描述
2.能画出PLC控制系统的输入 输出接线图
3.能写出输入输出的I/O表
4.能完成梯形图程序的编制
5.能写入软件验证程序的正确 性并运行
1.步进电机的结构与原理 2.基本输入输出指令 3.定时器指令、计数指令 4.高级指令(移位指令MOV和数 据传送指令SFTL/SFTR)
复位R指令将Q0.0或Q0.1清0。
.
24
脉冲串输出(PTO)
PTO功能可输出一定脉冲个数和占空比为50%的 方波脉冲。
➢输出脉冲的个数在1-4 294 967 295范围内可调; ➢输出脉冲的周期以µs或ms为增量单位,变化范围分别
是10~65 535µs或2~65 535ms。
如果周期小于两个时间单位,周期被默认为两个时 间单位。如果指定的脉冲数为0,则脉冲数默认为1。
B'
C'
C
B
A'
工作方式为三相双三拍 时,每通入一个电脉冲,
转子也是转30,即 S =
30。
CA通电
以上三种工作方式,三相双三拍和三相单双六拍较三 相单三拍稳定,因此较常采用。
.
14
步距角
步进电机通过一个电脉冲转子转过的角度,称为步距角。
S
360 Zr N
如:Zr=40 ,
N:一个周期的运行拍数,即通电状态
循环一周需要改变的次数
Zr:转子齿数
N=3
时
S
360 3 40 3
1 单拍制
拍数:N=km
m:相数
k= 2 双拍制
.
15
细分:细分就是指电机运行时的实际步矩角是基本步矩角 的几分之一。如:驱动器工作在10细分状态时,其步矩角只为电机 固有步矩角的十分之一,也就是说:当驱动器工作在不细分的整步状 态时,控制系统每发一个步进脉冲,电机转动1.8°,而用细分驱动 器工作在10细分状态时,电机只转动了0.18°。细分功能完全是由
PLC控制步进电机运转
摘要对可编程序控制器的步进电机控制系统进行设计,阐明了可编程序控制器及步进电机的结构和工作原理,同时给出了可编程序控制器控制步进电机电气控制系统的硬件组成和软件设计,包括可编程序控制器输入输出接线图、梯形图、程序设计和步进电机的驱动电路。
提出基于PLC的四相八拍步进电机控制的方案,介绍了控制系统的设计方案及其软硬件的实现方法,实现对四相步进电机的启动,停止控制、正反转控制。
方法简单易行,编程容易,可靠性高。
关键字:步进电动机 PLC 梯形图驱动电路目录1 引言 (4)2课题分析 (4)2.1 任务分析 (4)2.2 方案设计 (4)3 反应式步进电机 (6)3.1 步进电机的结构 (6)3.2 步进电机的工作原理 (7)4 可编程器件FX2N-32MR (8)4.1 FX2N-32MR的结构 (8)4.2 FX2N-32MR的工作原理 (8)5 硬件设计 (8)5.1 I/O端口 (8)5.2 I/O端子连接线 (9)5.3 驱动电路 (10)6 软件设计 (11)6.1 PLC控制步进电机控制方法 (11)6.2 梯形图 (12)7 调试 (14)7.1 硬件调试 (14)7.2 软件调试 (15)7.3 运行调试 (15)8 结论 (15)9 心得体会 (15)参考文献 (16)1.引言随着微处理器、计算机和数字通信技术的发展,计算机控制已经广泛地应用在所有的工业领域。
现代社会要求制造业对市场做出迅速的反应,生产设备和自动生产线的控制系统必须具有较高的可靠性和灵活性,可编程器件正是顺应这个要求,PLC已广泛应用各种机械设备和生产过程的自动化控制系统中。
步进电机是一种控制精度极高的电机。
在PLC步进电动机的控制系统中,输入到步进电动机绕组中的脉冲数或频率可以控制步进电动机的角位移和转速,在给步进电动机的各绕组输入脉冲时需要应用脉冲分配器分配脉冲。
2.课题分析2.1 任务分析步进电动机是一种将电脉冲信号转换成直线位移或角位移的执行元件。
步进电机PLC控制 (课堂用)课件
PPT学习交流
18
步进驱动器
C'
C
B
A'
A
B'
C'
C
B
A'
B相通电,转子2、4齿和B
相轴线对齐,相对A相通电 位置转30;
C相通电再转30
PPT学习交流
8
这种工作方式,因三相绕组中每次只有一相通电,而且,一 个循环周期共包括三个脉冲,所以称三相单三拍。
三相单三拍的特点: (1)每来一个电脉冲,转子转过 30。此角称为步距角,
•
图5-41是一种三相反应式步进电机,它由定子与转子两部分构成。电机定子
上有六个磁极,每个极上装有控制绕组,每两个相对的磁极组成一相。
脉 冲
放
步
负
分 配
大
进
载
器
器
机
脉冲信号
PPT学习交流
4
• 步进电机的转动受脉冲信号控制,每来一个脉冲信号,定 子绕组通电的状态就改变一次,而定子绕组通电后产生的 磁场对转子产生作用将使转子产生一个角位移。改变步进 电机定子绕组通电状态的电路称为脉冲分配器。控制脉冲 信号来到后,先送到脉冲分配器,经过分配器输出的信号 决定各定子绕组通电的顺序和步进电机转动的速度。步进 电机控制电路框图如图5-42 所示。从分配器输出的脉冲信 号还需经过功率放大之后才能送至步进电机的定子绕组。
第五章PLC的步进电机控制系统ppt课件
5.2步进电机在工业控制领域的主要应用情况介绍
步进电机作为执行元件,是机电一体化的关键产 品之一, 广泛应用在各种家电产品中,例如打印 机、磁盘驱动器、玩具、雨刷、震动寻呼机、机 械手臂和录像机等。另外步进电机也广泛应用于 各种工业自动化系统中。由于通过控制脉冲个数 可以很方便的控制步进电机转过的角位移,且步 进电机的误差不积累,可以达到准确定位的目的。 还可以通过控制频率很方便的改变步进电机的转 速和加速度,达到任意调速的目的,因此步进电 机可以广泛的应用于各种开环控制系统中
5.3西门子PLC对步进电机的控制方法
PLC直接控制步进电机 西门子PLC与步进电机驱动器控制步进电
机 高频脉冲输出控制举例
PLC直接控制步进电机
使用PLC直接控制步进电机时,可使用 PLC产生控制步进电机所需要的各种时序 的脉冲。例如三相步进电机可采用三种工 作方式:
三相单三拍 三相双三拍 三相单六拍
电机的位置和速度由绕组通电次数(脉冲 数)和频率成一一对应关系。而方向由绕 组通电的顺序决定。
步进电机的基本结构和工作原理
步进电机的基本参数主要有以下内容 1.电机固有步距角 2.步进电机的相数 3.保持转矩(HOLDING TORQUE) 4.钳制转矩(DETENT TORQUE)
1.电机固有步距角
3.保持转矩(HOLDING TORQUE)
保持转矩是指步进电机通电但没有转动时, 定子锁住转子的力矩。它是步进电机最重 要的参数之一,通常步进电机在低速时的 力矩接近保持转矩。由于步进电机的输出 力矩随速度的增大而不断衰减,输出功率 也随速度的增大而变化,所以保持转矩就 成为了衡量步进电机最重要的参数之一。 比如,当人们说2N.m的步进电机,在没 有特殊说明的情况下是指保持转矩为 2N.m的步进电机。