三菱plc控制步进电机编程
步进电机的三菱PLC控制
步进电机的三菱P L C控制Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】摘要:设计一种基于PLC的步进电机控制系统, 通过微型变速箱将步进电机角位移转化为直线位移, 进而带动直线伸缩机构运行。
该系统结构简单、性能稳定、经济价值和使用效果突出, 能够满足毫米级精确位移的使用需求。
关键词: PLC; 步进电机; 驱动器; 脉冲;方向。
目录第1章绪论设计背景步进电动机已成为除直流电动机和交流电动机以外的第三类电动机,传统电动机作为机电能量转换装置,在人类的生产和生活进入电气化过程中起着关键的作用。
可是在人类社会进入自动化时代的今天,传统电动机的功能已不能满足工厂自动化和办公自动化等各种运动控制系统的要求。
为适应这些要求,发展了一系列新的具备控制功能的电动机系统,其中较有自己特点,且应用十分广泛的一类便是步进电动机。
步进电动机的发展与计算机工业密切相关。
自从步进电动机在计算机外围设备中取代小型直流电动机以后,使其设备的性能提高,很快地促进了步进电动机的发展。
另一方面,微型计算机和数字控制技术的发展,又将作为数控系统执行部件的步进电动机推广应用到其他领域,如电加工机床、小功率机械加工机床、测量仪器、光学和医疗仪器以及包装机械等。
任何一种产品成熟的过程,基本上都是规格品种逐步统一和简化的过程。
现在,步进电动机的发展已归结为单段式结构的磁阻式、混合式和爪极结构的永磁式三类。
爪极电机价格便宜,性能指标不高,混合式和磁阻式主要作为高分辨率电动机,由于混合式步进电动机具有控制功率小,运行平稳性较好而逐步处于主导地位。
最典型的产品是二相8极50齿的电动机,步距角°/°(全步/半步);还有五相10极50齿和一些转子100齿的二相和五相步进电动机,五相电动机主要用于运行性能较高的场合。
到目前,工业发达国家的磁阻式步进电动机已极少见[1]。
PLC的脉冲输出控制步进电机的实用方法
断电复位方可有效。 步进电机的型号是86BYG402,其相电流选4A,拨位
开关1 2 3 4设定值为1111。细分数根据实际应用的精度 要求来选取。
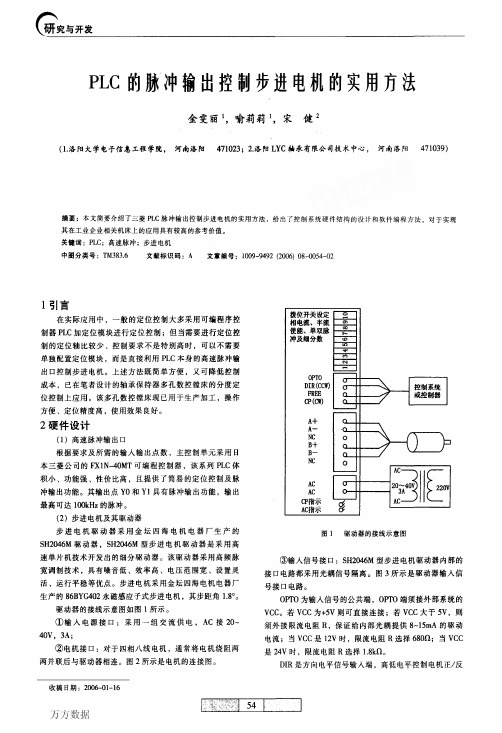
(3)PLC与步进电机驱动器的硬件连接 可编程序控制器PLC与步进电机驱动器的连接如图4
2.期刊论文 胡佳丽.闫宝瑞.张安震.李庆春.何亚东.信春玲 S7-200 PLC在伺服电机位置控制中的应用 -自动化仪
表2009,30(12)
为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度,探讨了基于西门子S7-200系列PLC和Copley系列伺服系统的位置控制方法.通过 介绍系统软硬件构成及其特点,详细论述了PLC系统通过高速脉冲输出、EM253位置控制模块以及自由口通信这三种方式控制伺服电机,以实现绝对运动、 相对运动等;同时对它们进行了一系列的比较.实验证明,三种控制方式各有其不同的应用场合,对类似的工业控制具有一定的借鉴参考意义.
1234 1000 100l 1010 1011 1100 1101 11lO 1111
相电流 2.25A 2.50A 2.75A 3.OOA 3.25A 3.50A 3.75A 4.00A
表2 细分设定【位7 8 9 10)
7 8 9 10 0000 0001 oolO 0011 0100 0101 0110 0111
在图4中将可编程序控制器的脉冲输出端yo的公共端como和输出点y10的公共端com4皆与可编程序控表1相电流设定i位12341234相电流1234相电流0000025a1000225a0001050a100l250a0010075a1010275a00111ooa10113ooa0100125a1100325a0101150a1101350a0110175a11lo375a01112ooa1111400a表2细分设定位7891078910细分数789lo细分数0000110001800012100l20oolo410lo32001151011400100611005001018110l01101011101280111161111256制器的24v地即com相连步进电机驱动器的输入信号公共端与可编程序控制器plc的24v电源相连plc的脉冲输出端yo外接18k的限流电阻连接至步进脉冲输入信号cpplc的输出点y10用于控制步进电机的旋转方wc咖024vsh204硼步进电机驱动器fxlhomtc删0ptp18置yot一c卜一cp18置y10dir图4plc与步进电机驱动器的连接向外接18k的限流电阻连接至方向电平输入端dir
PLC控制步进电机的实例(图与程序)

态已已
X已
源
个
·
源
X已
意已已已
个个
个
个
·
·
B善
·
B善
-控已已已 个个个 个 个个个 · ·F而状状大 F而状状-
个 ·V大 用ND ·源大 源- B大 B个
善D而V源在
善D而V相在 个
D明引成已
-意已已已在 X已
意已已已
D明引成已
已个
D明引成已
-意已已已在 X引
意已已已
B 意已已已
善
在 D明引成已
个
个 个个个
个 个
P程点
善
在个
个
·
善D而V源在
FX引脉
个
·FX P程点
引已已确画Z
个
·P程脉大 P程脉-
D相而大 D相而-
个
·
善D而V源在如
意态
D明引成已
D明引成已
个
·
X已
源
X引
B
善
在个
·
善
在个
·
个
·
D明引成已
善
在个
·意态
D明引成已
Y已
已已
D明引成已
-意已已已 个
·
源B
X引 善 点
在 D明引成已
三菱实用定位控制程序案例
三菱实用定位控制程序案例
首先,看这篇文章需要具备定位的基础知识,知道步进电机怎么通过脉冲去控制的。
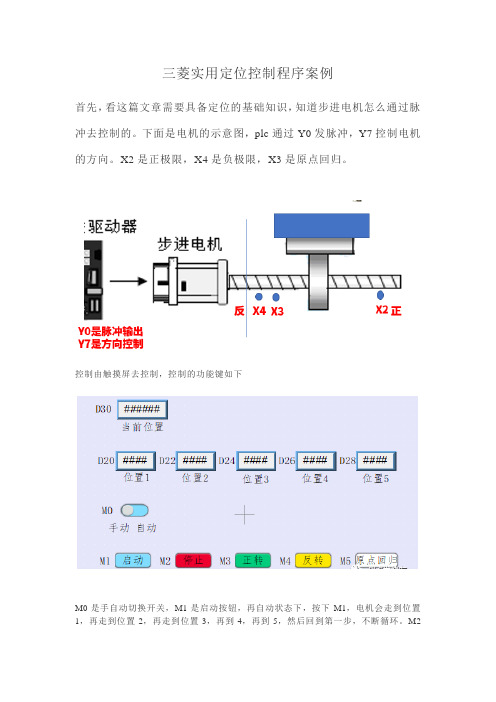
下面是电机的示意图,plc通过Y0发脉冲,Y7控制电机的方向。
X2是正极限,X4是负极限,X3是原点回归。
控制由触摸屏去控制,控制的功能键如下
M0是手自动切换开关,M1是启动按钮,再自动状态下,按下M1,电机会走到位置1,再走到位置2,再走到位置3,再到4,再到5,然后回到第一步,不断循环。
M2
是停止的按钮,按下去后动作停止,M3是正转点动控制,M4是反转点动控制,M5是原点回归启动,按下原点回归,电机能够自动回到原点X3。
下面我们开始写程序,先写手动控制的程序,两个对应的M点分别控制输出正转和反转,把正反极限写入。
PLC控制步进电机的系统设计(毕业设计)

摘要本文主要阐述了三相三拍步进电动机结构和步进电机原理,以及对步进电机的调速和正反转的研究。
采用PLC基本逻辑指令和常用指令的方法对步进电机调速很正反转控制。
步进电机是一种将脉冲信号转换成直线位移或角位移的执行元件。
步进电机的输出位移量与输入脉冲个数成正比,其速度与单位时间内输入的脉冲数(即脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。
所以只要控制指令脉冲的数量、频率及电机绕组通电的相序,便可控制步进电机的输出位移量、速度和方向。
步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式的改变都可在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。
SummaryThis paper describes the structure of three-phase three-beat stepper motors and stepper motor principle,and the stepper motor speed control and reversing research. Using PLC basic logic instructions and common method of instruction is reversing the stepper motor speed control.Stepper motor is a pulse signal into a linear displacement or angular displacement of the actuator.The output of the stepper motor displacement is proportional to the number of input pulses,the speed and unit time input pulses (ie pulse frequency)is proportional to its steering and pulse distribution phase stepper motor winding phase sequence of the.So long as the control command pulse number, frequency and phase sequence of the motor windings are energized,the output can be controlled stepper motor displacement, velocity and direction.Stepper motor has good control performance, and its start,stop,reverse and other changes in the way of any operation can be completed within a few pulses, and the availability of high control accuracy,and have been widely used。
PLC高速脉冲输出控制步进电机

PLC高速脉冲输出控制步进电机1. 背景介绍步进电机是一种常见的电动机类型,它具有精准的位置控制和高速运动的特点。
在很多工业自动化应用中,步进电机常常需要与PLC(可编程逻辑控制器)配合使用,以实现精准的位置控制和高速脉冲输出。
本文档将介绍如何通过PLC实现高速脉冲输出控制步进电机的方法和步骤。
2. 所需材料在开始之前,我们需要准备以下材料:•PLC控制器•步进电机驱动器•步进电机•连接线•电源请确保以上材料齐全并符合各自的规格要求。
3. PLC高速脉冲输出控制步进电机的步骤步骤一:连接电源和PLC控制器首先,将电源连接到PLC控制器上。
确保电源的电压和PLC控制器的额定电压匹配。
然后将PLC控制器的电源线连接到电源上,并确保连接牢固。
步骤二:连接步进电机驱动器和PLC控制器将步进电机驱动器的电源线连接到电源上,并确保连接牢固。
然后,将步进电机驱动器的控制线连接到PLC控制器上,确保连接正确。
步骤三:连接步进电机和步进电机驱动器将步进电机的线束连接到步进电机驱动器上,确保连接正确。
根据步进电机的规格要求,选择正确的接线方法。
步骤四:PLC编程在PLC编程软件中进行编程,以实现高速脉冲输出控制步进电机。
以下是一个简单的PLC编程示例:BEGINVARmotor_output: BOOL := FALSE; -- 步进电机控制信号pulse_delay: TIME := T#10MS; -- 脉冲延迟时间,控制步进电机的速度END_VAR-- 主程序WHILE TRUE DO-- 输出一个脉冲信号控制步进电机运动motor_output := NOT motor_output;DELAY pulse_delay; -- 延迟一段时间,控制步进电机的速度END_WHILE;END;以上的PLC程序实现了一个简单的高速脉冲输出控制步进电机的功能。
在主程序中,通过循环不断地输出一个脉冲信号来控制步进电机的运动,同时通过调整延迟时间来控制步进电机的速度。
三菱PLC和步进电机实现二维位置控制
三菱PLC和步进电机实现二维位置控制作者:付宁宁来源:《电子世界》2013年第16期【摘要】本文详细阐述了三菱FX2N型PLC驱动步进电机的方法,并给出了PLC和步进电机的实际接线以及梯形图程序,在实际运行中效果良好,具有一定的实用价值。
【关键词】PLC;步进电机;梯形图;位置控制一、前言步进电机是将控制脉冲信号变换成角位移或是直线位移的一种特殊电机,它控制灵活、运行可靠、性能好、误差不会长期累积,适用于数字加工设备、自动生产线、自动控制仪表、计算机及办公自动化设备甚至家用电器中。
由PLC和步进电机组成的位值控制系统,是一种常见的控制系统。
但是由于以往PLC的控制指令简单,因此要实现位置控制仍旧是一件较为复杂的事情。
现在,随着计算机技术的发展,PLC技术也得到了长足的进步,许多厂家的PLC均已发展了和步进电机配套的指令,使位置控制变得极其容易。
二、工作原理步进电机的输出位移量与输入脉冲个数成正比,其速度与单位时间内输入的脉冲数(即脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。
所以只要控制指令脉冲的数量、频率及电机绕组通电的相序,便可控制步进电机的输出位移、速度和方向。
步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式的改变都可以在少数脉冲内完成,且可获得较高的控制精度,因此得到了广泛的应用。
步进电机位置控制系统以三菱FX2N为控制单元,以步进电机驱动器为驱动单元,以三相步进电机为执行单元。
通过PLC控制发出脉冲的个数,从而控制步进电机的运转角度,实现对位置的精确控制。
PLC控制步进电机结构图1所示。
三、FX2N的脉冲输出指令在FX2N型PLC中,为了和标准的步进电机驱动器配合使用,在其内部专门设计了一条速度及位置控制指令(PLSY FNC57)。
利用这条指令,FX2N型PLC可以输出两路脉冲,分别控制两台步进电机,很方便地实现二维位置控制。
该指令在应用过程中需要指定以下端口和操作数为位置控制专用,其助记符、功能、操作数、程序部如表1所示。
三菱plc控制步进电机编程知识讲解

三菱p l c控制步进电
机编程
三菱plc控制步进电机编程
控制要求,PLC发出脉冲信号Y0和方向信号Y10,假设步进电机转一周需要plc发出1000个脉冲,且要求在1S 左右转动一周,现在要求步进电机正转5周,停5s,再反转5周,停5s,如此循环。
三菱PLC指令PLSR K400 D0 K3500 Y0 这里K400、D0、K3500各是指什么
匀加减速指令,在指令中可以设置脉冲的最大频率、脉冲总数、加减速时间和脉冲输出点。
通过设置加减速时间来实现匀加速。
如果脉冲加方向的脉冲模式也需要另外控制方向点。
针对指定的最高频率,进行定加速,在达到所指定的输出脉冲数后,进行定减速
k400为最高频率,D0中内容为总输出的脉冲数,K3500加减速时间单位为ms,y0为输出点
如 DDRVI K999999 K200 Y0 Y3
那么 DDRVI 是相对定位 K999999是无限就是一直转 K200是速度 Y0是脉冲输出地址 Y3是方向PLC控制步进电机正反转的程序和梯形图?
一种是双脉冲的!一路正,一路反。
一种是脉冲加方向的!一个口给脉冲!另外一个接通就正转,不接通就反转。
欧姆龙EE-SX670A传感器。
PLC如何控制步进电机

PLC如何控制步进电机PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的控制设备,通过输入/输出模块对各种机电设备进行控制。
在PLC系统中,步进电机是常见的执行元件之一,它具有准确的位置控制和高的加减速性能。
本文将介绍PLC如何控制步进电机,包括步进电机的驱动方式、PLC的控制原理及步进电机控制的程序设计。
一、步进电机的驱动方式1.串行通信驱动方式:步进电机通过串行通信驱动方式与PLC进行通信和控制。
首先,将PLC与串行通信模块相连,通过串行通信模块与步进电机控制器进行通信。
PLC通过串行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
2.并行通信驱动方式:步进电机通过并行通信驱动方式与PLC进行通信和控制。
与串行通信驱动方式类似,首先将PLC与并行通信模块相连,通过并行通信模块与步进电机控制器进行通信。
PLC通过并行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
3.脉冲驱动方式:步进电机通过脉冲驱动方式与PLC进行通信和控制。
在脉冲驱动方式中,需要PLC输出脉冲信号控制步进电机。
通常情况下,PLC将脉冲信号传递给步进电机驱动器,在驱动器中产生相应的控制信号,实现对步进电机的控制。
二、PLC的控制原理PLC作为控制器,一般采用扫描运行方式。
其运行原理如下:1.输入信号读取:PLC将外部输入信号输入到输入模块中,采集输入信号,并将其从输入模块传递给中央处理器(CPU)进行处理。
2. 程序执行:CPU根据事先编写好的程序进行处理,包括数据处理、逻辑运算和控制计算等。
PLC程序一般采用ladder diagram(梯形图)进行编写。
3.输出信号控制:根据程序的执行结果,CPU将处理好的数据通过输出模块发送给外部设备,用于控制和操作外部设备。
三、步进电机控制的程序设计步进电机的控制程序主要包括参数设定、模式选择、起停控制、运动控制等部分。
下面以一个简单的例子来说明步进电机控制的程序设计过程:1.参数设定:首先需要设定步进电机的一些参数,如电机型号、步距角度、运动速度等。
PLC的脉冲输出控制步进电机的实用方法
所示。 在图4中,将可编程序控制器的脉冲输出端YO的公
共端COMO和输出点Y10的公共端COM4皆与可编程序控
表1 相电流设定I位1 2 3 4)
1234 0000 0001 0010 0011 0100 0101 0110 0111
相电流 0.25A 0.50A 0.75A 1.OOA 1.25A 1.50A 1.75A 2.OOA
关键词:PLC;高速躲冲;步迸电枧
中嗣分类号:TM383.6
文献标识码:A
文章编号:1009—9492 f2006)08一0054一02
1引言
在实际应用中,一般的定位控制大多采用可编程序控 制器PLC加定位模块进行定位控制;但当需要进行定位控 制的定位轴比较少、控制要求不是特别高时,可以不需要 单独配置定位模块,而是直接利用PLC本身的高速脉冲输 出口控制步进电机。上述方法既简单方便,又可降低控制 成本,已在笔者设计的轴承保持器多孔数控镗床的分度定 位控制上应用。该多孔数控镗床现已用于生产加工,操作 方便、定位精度高,使用效果良好。
机电工程技术,2005,(10):88—89.
作者简介:黄杰雄,男,1973年生,广东化州人,大学本科, 程师。研究领域:机械设计。已发表论文2篇。
f编辑:向
西37滂滂沿bo,妨j,o’切3,,7》,》7b07》70,、),o,》70’o’070,o’070,),、>,滂沿093,b》,治匆谤o,i扫:玲:扫西o,,
90mⅦ、日=33m,而企业购买的水泵达不到系统的要求,
实际上水泵没有在其设计点的参数下运行,经常在其工作
范围外运行,而且也没有通过调节出水阀门调节水泵的工 况,从而经常使水泵电机超负荷运转,发生了电机有大的 噪声,最后烧坏了电机。我们建议其购买另一规格为 GDDl00—32(参数为p=90m3/h、日=32m、辟:1lkW)的泵。 自从使用新的水泵后,水泵运行一直良好。
fx2n脉冲输出指令

fx2n脉冲输出指令FX2N脉冲输出指令是指Mitsubishi(三菱)PLC中的一种特定指令,用于控制PLC输出脉冲信号。
本文将详细介绍FX2N脉冲输出指令的使用方法及其应用场景。
一、FX2N脉冲输出指令概述FX2N脉冲输出指令是Mitsubishi FX系列PLC中的一种特殊指令,用于控制PLC输出脉冲信号。
通过该指令,可以实现对外部设备的控制,例如驱动步进电机、执行定时操作等。
FX2N脉冲输出指令具有高精度、高稳定性和高可靠性的特点,广泛应用于自动化控制领域。
二、FX2N脉冲输出指令的基本语法FX2N脉冲输出指令的基本语法如下:LD PULSE Y X D C其中,PULSE为脉冲输出指令的关键字,Y为输出端口,X为输入端口,D为延时参数,C为计数参数。
三、FX2N脉冲输出指令的具体用法1. 控制步进电机FX2N脉冲输出指令可以用于控制步进电机的转动。
通过设定输出端口Y和输入端口X的数值,可以实现步进电机的正转、反转和停止动作。
延时参数D可以控制每个脉冲信号的时间间隔,计数参数C可以控制脉冲信号的次数。
2. 执行定时操作FX2N脉冲输出指令还可以用于执行定时操作。
通过设定输出端口Y 和输入端口X的数值,可以实现定时开关的控制。
延时参数D可以控制每个脉冲信号的时间间隔,计数参数C可以控制脉冲信号的次数。
3. 实现精确计数FX2N脉冲输出指令具有高精度和高稳定性,可以实现对外部设备的精确计数。
通过设定输出端口Y和输入端口X的数值,可以实现对脉冲信号的计数。
延时参数D可以控制每个脉冲信号的时间间隔,计数参数C可以控制脉冲信号的次数。
四、FX2N脉冲输出指令的应用场景1. 工业自动化控制FX2N脉冲输出指令广泛应用于工业自动化控制领域。
通过控制PLC 输出脉冲信号,可以实现对各种设备的精确控制,提高生产效率和产品质量。
2. 机械设备控制FX2N脉冲输出指令可以用于机械设备的控制,例如控制步进电机、伺服电机等。
用FX1S 实现PLC控制步进电机的实例(图与程序)

用FX1S 实现PLC控制步进电机的实例(图与程序)原创2018-01-26 工控教练工控教练FX1s是晶体管型PLC,有两个脉冲输出端子,分别是Y0 和Y1,能同时输出两组100KHZ的脉冲。
PLS+,PLS-是步进驱动器的脉冲信号端子,DIR+,DIR-是步进驱动器的方向信号端子。
本次实例的动作方式:当正转开关X0 闭合时,电机动作到A 点停止;当反转开关X1 闭合时,电机动作到B 点停止。
1·绝对位置控制(DRVA),是指定要走到距离原点的位置,原点位置数据存放于32 位寄存器D8140 里。
当机械位于我们设定的原点位置时用程序把D8140 的值清零,也就确定了原点的位置。
·实例动作方式:正转开关X0 闭合时,电机动作到A 点停止;反转开关X1 闭合时,电机动作到B 点停止。
2 三菱FX系列PLC绝对位置控制指令DRVA应用:绝对位置控制指令DRVA的格式:DRVA D0 D2 Y0 Y2 *D0:目标位置,可以是数值或是寄存器,也就是PLC要输出的脉冲个数。
*D2:输出脉冲频率,可以是数值或是寄存器。
也就是PLC输出的脉冲频率,也就是速度*Y0:脉冲输出地址,只能是Y0或Y1。
*Y2:方向控制输出,正向是ON或是OFF,反向是OFF或是ON (根据所控制执行元件设置来确定)3下面是PLC程序的梯形图:(此程序只为说明用,实用需改善。
)·在原点时将D8140的值清零(本程序中没有做此功能)·32 位寄存器D8140 是存放Y0 的输出脉冲数,正转时增加,反转时减少。
当正转动作到A 点时,D8140 的值是3000。
此时闭合X1,机械反转动作到B 点,也就是-3000 的位置。
D8140 的值就是-3000。
·当机械从A 点向B 点动作过程中,X1 断开(如在C 点断开)则D8140 的值就是200,此时再闭合X0,机械正转动作到A 点停止。
PLC实现步进电机的正反转和调整控制

PLC实现步进电机的正反转和调整控制PLC(可编程逻辑控制器)是一种电子设备,用于控制工业自动化系统中的运动和操作。
步进电机是一种常用的驱动器,它的旋转运动是通过一步一步地前进来实现的。
本文将探讨如何使用PLC来实现步进电机的正反转和调整控制。
步进电机的正反转控制是通过改变电机绕组的相序来实现的。
在PLC 中,我们可以使用输出模块来控制电机的相序。
以下是步骤:1.配置PLC硬件:在PLC中插入输出模块,并与电机的各个相连接。
确保正确连接。
2.编程PLC:使用PLC编程软件,编写一个控制程序来实现电机的正反转。
首先,定义输出模块的输出信号来控制电机。
然后使用程序语言来编写逻辑控制指令,根据需要来改变输出信号的状态。
为了实现正反转,需要改变输出信号的相序。
3.实现正反转控制:在编程中,定义一个变量来控制步进电机的运动方向。
当变量为正值时,电机正转;当变量为负值时,电机反转。
根据变量的值来改变输出模块的输出信号,以改变电机的相序。
4.运行程序:将PLC连接到电源,并加载程序到PLC中。
启动PLC,程序将开始运行。
通过改变变量的值,我们可以控制电机的正反转。
除了控制步进电机的正反转,PLC还可以实现步进电机的调整控制。
调整控制是通过改变电机的步距和速度来实现的。
以下是步骤:1.配置PLC硬件:在PLC中插入输出模块,并与电机的各个相连接。
与正反转控制相同,确保正确连接。
2.编程PLC:使用PLC编程软件编写控制程序。
首先,定义输出模块的输出信号来控制电机的相序。
然后,使用程序语言来编写逻辑控制指令,根据需要改变输出信号的状态。
为了实现调整控制,需要改变输出信号的频率和占空比。
3.实现调整控制:在编程中,定义两个变量来控制电机的步距和速度。
步距变量控制电机每一步的距离,速度变量控制电机的旋转速度。
根据变量的值来改变输出模块的输出信号,以改变电机的相序,并控制步距和速度。
4.运行程序:将PLC连接到电源,并加载程序到PLC中。
PLC实现步进电机的正反转及调整控制

PLC实现步进电机的正反转及调整控制PLC(可编程逻辑控制器)可以广泛应用于工业自动化控制系统中,包括步进电机的正反转及调整控制。
本文将详细介绍如何使用PLC实现步进电机的正反转及调整控制。
一、步进电机的原理步进电机是一种用电脉冲驱动的电动机,它是按固定顺序将电流导通到电动机的相绕组中,从而使电动机按步进的方式转动。
步进电机有两种基本的工作模式:全步进和半步进。
在全步进模式下,电机每接收到一个脉冲就向前转动一个固定的步距角度。
在半步进模式下,电机接收到一个脉冲时向前转动半个步距角度。
二、PLC实现步进电机的正反转1.硬件连接将PLC的输出端口与步进电机的驱动器相连,将驱动器的控制信号输出口与步进电机相连。
确保电源连接正确,驱动器的供电电压要符合步进电机的额定电压。
2.编写PLC程序使用PLC编程软件编写PLC程序来控制步进电机的正反转。
以下是一个简单的PLC程序示例:```BEGINMOTOR_CONTROL_TRIG:=FALSE;//步进电机控制信号MOTOR_DIRECTION:=FORWARD;//步进电机转动方向,FORWARD表示正转,REVERSE表示反转//步进电机正转控制MOTOR_FORWARD:IF(START_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=TRUE;MOTOR_DIRECTION:=FORWARD;END_IF;//步进电机反转控制MOTOR_REVERSE:IF(STOP_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=TRUE;MOTOR_DIRECTION:=REVERSE;END_IF;//步进电机停止控制MOTOR_STOP:IF(STOP_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=FALSE;END_IF;END```Begitalogic Flowcode是PLC编程软件之一,提供了简单易懂的图形界面来编写PLC程序。
用PLSY指令控制

用plc控制两台伺服做两轴控制用PLSY指令控制步进电机实际上德国人有更好的办法,就是用真正的光学绝对值码盘的绝对值编码器,并同时输出正余弦信号,其绝对值信号也是用通讯形式输出,例如海德汉的EnDat,或STEGMANN的Hipeface,其时钟频率可在1MHz以上,虽然绝对值信号输出,仍然要编码-解码,速度快了,响应一样跟不上,但是不要忘了,其是真正光学刻线的绝对值,其响应不上并不丢脉冲。
并不影响精度,而只是滞后,这时,其同时输出的正余弦信号就有用了,既可以作为速度反馈(即时的),也可以作为高速定位的冗余,此高速定位是减速,等速度下来,仍然由高精度绝对信号定位停车,从而做到高速高精度。
用这种方法,编码器是贵了,但运动控制卡的成本就可以下来,这的确是种好方法,可惜,国内做运动控制的,基本是跟着日本人走,还很少有人认识到这种方法。
三菱PLC的PLSY指令我想实现步进电机旋转60° 我这样写对不对 PLSY k3000 k240 y3 步进电机的步距角是0.9不对的首先对脉冲输出仅限于y000或y001 也就是说不能指定y003一个脉冲是赚一个步距角吗plsy k3000 k66 y000PLSY K3000 K1548 Y3步距0.9的Y0和Y1同时输出PLSY指令是可以的(其实也不是同时,因为你得分别写两条这个指令,所以只能说是在同一扫描周期内执行而已.姑且认为是同时吧)如下:LD X0PLSY K1000 K2000 Y0PLSY K1000 K2000 Y1Y0和Y1的高速输出标志各是各的,不会互相影响.不可以同时执行同一个输出点的两条PLSY指令.首先用MT晶体管系列的,其次,最好不用PLSY指令,使用DIVR指令,可重复使用.对于脉冲输出来控制伺服电机,台达PLC完全可以胜任,而且已经有很多实际应用,PLSY/PLSR指令是脉冲输出控制指令,DRVI/DRVA/ZRN是专门定位指令,还有PWM脉宽调制指令都可以使用,其中PLSY是直接脉冲输出,PLSR是可以设置加减速时间脉冲输出指令.前几日改造设备,原设备用的PLC是三菱FX1N的,运动机构用的是安川的伺服电机。
plc步进电机控制方法攻略程序+图纸
PLC控制步进电机应用实例基于PLC的步进电机运动控制一、步进电机工作原理1. 步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单2. 步进电机的运转原理及结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A‘与齿5相对齐,(A‘就是A,齿5就是齿1)3. 旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力,以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
步进电机的静态指标术语拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
三菱plc控制步进电机编程

三菱plc控制步进电机编程(一)
控制要求,PLC发出脉冲信号Y0和方向信号Y10,假设步进电机转一周需要plc发出1000个脉冲,且要求在1S 左右转动一周,现在要求步进电机正转5周,停5s,再反转5周,停5s,如此循环。
三菱PLC指令PLSR K400 D0 K3500 Y0 这里K400、D0、K3500各是指什么
匀加减速指令,在指令中可以设置脉冲的最大频率、脉冲总数、加减速时间和脉冲输出点。
通过设置加减速时间来实现匀加速。
如果脉冲加方向的脉冲模式也需要另外控制方向点。
针对指定的最高频率,进行定加速,在达到所指定的输出脉冲数后,进行定减速k400为最高频率,D0中内容为总输出的脉冲数,K3500加减速时间单位为ms,y0为输出点
如 DDRVI K999999 K200 Y0 Y3
那么 DDRVI 是相对定位K999999是无限就是一直转K200是速度Y0是脉冲输出地址Y3是方向PLC控制步进电机正反转的程序和梯形图?
一种是双脉冲的!一路正,一路反。
一种是脉冲加方向的!一个口给脉冲!另外一个接通就正转,不接通就反转。
欧姆龙EE-SX670A传感器
型号项目
种类型L型T型紧密安装型
NPN EE-SX670 EE-SX671 EE- EE-SX672 EE- EE-SX673 EE- EE-SX674 EE-。
PLC如何控制步进电机

PLC如何控制步进电机PLC(可编程逻辑控制器)是一种常用于工业控制系统中的数字计算机。
它由中央处理器、内存、输入输出模块和编程模块组成,可以实现自动化控制以及过程监控和数据采集等功能。
步进电机是一种将电信号转换为机械运动的设备,其运动是通过依次切换电机的多个绕组来实现的。
PLC可通过适当的接口电路和输入输出模块来控制步进电机的动作。
以下是PLC控制步进电机的一般步骤:1.熟悉步进电机的原理和结构:步进电机由多个绕组组成,每个绕组称为一个相。
电流通过相绕组时,会产生磁场,从而使电机转动。
2.确定步进电机的驱动方式:步进电机的驱动方式通常有两种,即单相驱动和双相驱动。
单相驱动是指一次只激活一个相绕组,而双相驱动是指一次激活两个相绕组。
3.连接PLC和步进电机:根据步进电机的引脚定义,通过适当的接口电路将PLC的输出连接到步进电机的绕组上。
这些接口电路通常由继电器、晶体管、驱动板等组成,用于增加输出电流的驱动能力。
4.编写PLC程序:使用PLC的编程软件,编写控制步进电机的程序。
根据步进电机的驱动方式和需求,定义相应的输入输出变量、计时器、计数器和状态触发器等。
通过逻辑语句和函数块,实现步进电机的控制逻辑。
5.配置PLC的输入输出模块:根据实际连接情况,配置PLC的输入输出模块。
将步进电机的输入信号与PLC的输入模块相连,将步进电机的输出信号与PLC的输出模块相连。
6.调试和测试:在PLC上加载编写好的程序,对步进电机进行调试和测试。
通过监视和分析PLC的输入输出变量,检查步进电机的运动和状态是否符合预期。
7.优化和改进:根据实际的运行情况,不断优化和改进步进电机的控制程序。
可以通过修改控制逻辑、增加运动规划算法、调整驱动参数等方式改善步进电机的运动精度和稳定性。
总结起来,PLC可以通过适当的接口电路和输入输出模块来控制步进电机的动作。
通过编写PLC程序,并配置输入输出模块,可以使步进电机按照预定的路线和速度运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三菱plc控制步进电机编程
控制要求,PLC发出脉冲信号Y0和方向信号Y10,假设步进电机转一周需要plc发出1000个脉冲,且要求在1S 左右转动一周,现在要求步进电机正转5周,停5s,再反转5周,停5s,如此循环。
三菱PLC指令PLSR K400 D0 K3500 Y0 这里K400、D0、K3500各是指什么
匀加减速指令,在指令中可以设置脉冲的最大频率、脉冲总数、加减速时间和脉冲输出点。
通过设置
加减速时间来实现匀加速。
如果脉冲加方向的脉冲模式也需要另外控制方向点。
针对指定的最高频率,进行定加速,在达到所指定的输出脉冲数后,进行定减速
k400为最高频率,D0中内容为总输出的脉冲数,K3500加减速时间单位为ms,y0为输出点
如DDRVI K999999 K200 Y0 Y3
那么DDRVI 是相对定位K999999是无限就是一直转K200是速度Y0是脉冲输出地址Y3是方向PLC控制步进电机正反转的程序和梯形图?
一种是双脉冲的!一路正,一路反。
一种是脉冲加方向的!一个口给脉冲!另外一个接通就正转,不接通就反转。
欧姆龙EE-SX670A传感器
型号项目种类标准型L型T型紧密安装型
NPN
EE-SX670
EE-SX670A
EE-SX470
EE-SX671
EE-SX671A
EE-SX471
EE-SX672
EE-SX672A
EE-SX472
EE-SX673
EE-SX673A
EE-SX473
EE-SX674
EE-SX674A
EE-SX474 PNP
EE-SX670P
EE-SX670R
EE-SX470P
EE-SX671P
EE-SX671R
EE-SX471P
EE-SX672P
EE-SX672R
EE-SX472P
EE-SX673P
EE-SX673R
EE-SX473P
EE-SX674P
EE-SX674R
EE-SX474P
检测距离5mm(凹槽宽度)
标准检测距离不透明体2×0.8mm以上
应差距离0.025mm
光源(最大发光波
长)
GaAs红外发光二级管(940nm)
显示灯*1 如光时灯亮(红色)(A型、R型为遮光时灯亮)电源电压DC5~24V±10% 脉动(p-p)10%以下
消耗电流35mA以下(NPN型)、30mA以下(PNP型)
控制输出
NPN型:NPN集电极开路输出DC5~24V 100mA以下
残留电压0.8V以下(负载电流100mA时)残留电压0.4V以下(负载电流40mA 时)
PNP型:PNP集电极开路输出DC5~24V 50mA以下
残留电压1.3V以下(负载电流50mA时)
应答频率* 21kHz以上(平均值:3kHz)
使用环境照度受光面照度荧光灯1,000lx以下
环境温度动作时:-25~+55℃保存时:-30~+80℃(不结冰)环境湿度动作时:5~85%RH 保存时:5~95%RH (不结露)
振动(耐久) 20~2,000Hz (最大加速度100m/s2 )
复振幅1.5mm X、Y、Z各方向2h(4min周期)
冲击(耐久) 500m/s2 X、Y、Z各方向3次
保护构造IEC规格IP50
连接方式接插件式(能直接插焊)
质量(捆包状态)约3.1g 约3g 约2.4g 约2.3g 约3g
材质
外壳
聚碳酸酯保护罩
投.受光
部。