运动控制系统课程设计交流电动机减压软起动系统仿真
交流异步电动机固态软启动器技术及仿真研究

交流异步电动机固态软启动器技术及仿真研究随着现代化工业的发展,异步电动机的应用越来越广泛。
在工业界中,异步电动机一直是主流电动机种类。
它结构简单、可靠性高、成本低,因此在工业设备控制中受到广泛应用。
尽管异步电动机在许多应用领域使用广泛,但它们面临的最大挑战之一是启动时的大电流问题。
为了解决这个问题,今天我们将讨论交流异步电动机固态软启动器技术及仿真研究。
固态软启动器是一种最大限度降低异步电动机启动时电流冲击的控制装置。
与传统的直接启动相比,固态软启动器可以实现电流的平稳变化,从而提高设备的可靠性,延长设备的使用寿命。
与此同时,软启动器还可以降低设备的能源消耗,并减少对电网的影响。
因此,研究交流异步电动机固态软启动器技术已经成为当前电动机控制的热点问题。
交流异步电动机固态软启动器技术主要包括两个模块:前端整流模块和后端逆变模块。
前端整流模块是将交流电源转换为直流电源的过程,后端逆变模块可以根据需要将直流电压转换为交流电压。
在软启动过程中,前端整流模块可以根据需要调整输出电压和输出电流,以平稳的方式将异步电动机加速到工作速度。
为了验证交流异步电动机固态软启动器技术的可行性和有效性,本文采用Matlab仿真平台进行了实验。
仿真结果表明,软启动器可以平稳、低电流地启动电机,从而避免了传统的直接启动带来的电流冲击。
此外,仿真结果还表明,软启动器能够满足工业生产的实际需求,是一种可行的电动机控制方案。
总之,交流异步电动机固态软启动器技术及仿真研究是当前电动机控制的热点问题之一。
通过对软启动器的设计和仿真分析,可以实现电机的平稳启动,保护设备安全,延长设备寿命,降低能源消耗,从而在工业自动化控制、能源管理等方面发挥重要作用。
除了软启动功能,交流异步电动机固态软启动器技术还具有很多优点。
例如,它们不仅可以大大降低起动时的电流冲击,而且可以在电机运行中保证高效率、低噪声和平滑的运行。
此外,软启动器还减轻了电网的压力,保护了电源和设备。
软起动器仿真工具(STS 软件)使用指南说明书

https:///cs/cn/zh/view/109763561C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d目录1软起动器仿真工具(STS 软件)简介 ................................................................ 31.1什么是STS 软件 ................................................................................ 31.2如何下载STS 软件 ............................................................................ 31.2.1STS 软件Windows 下载..................................................................... 31.2.2手机App 下载 (32)STS 使用介绍 ................................................................................................... 42.1电脑版STS 软件应用指南:............................................................... 41.下载并安装此软件后,在软件里输入常规数据,并根据实际情况选择电机以及负载类型: ................................................................... 42.2手机版STS 软件使用指南 . (10)C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d 1软起动器仿真工具(STS 软件)简介1.1什么是STS 软件STS 软件全称“Simulation Tool for Soft Starters ”(软起动器仿真工具),是一款可以根据您的应用,简单快速的为您推荐合适的软起动器的工具。
实验2交流电动机减压软启动系统仿真
实验2 交流电动机减压软启动系统仿真
一、实验目的
加深对异步电机工作原理的理解,了解交流系统软启动的原理。
学会使用仿真软件MATLAB中的SIMULINK模块,搭建交流调速系统的全压起动仿真,以及减压软起动系统仿真。
通过比较软启动的起动电流波形,输出转速等相关波形,从而本质上理解该方法。
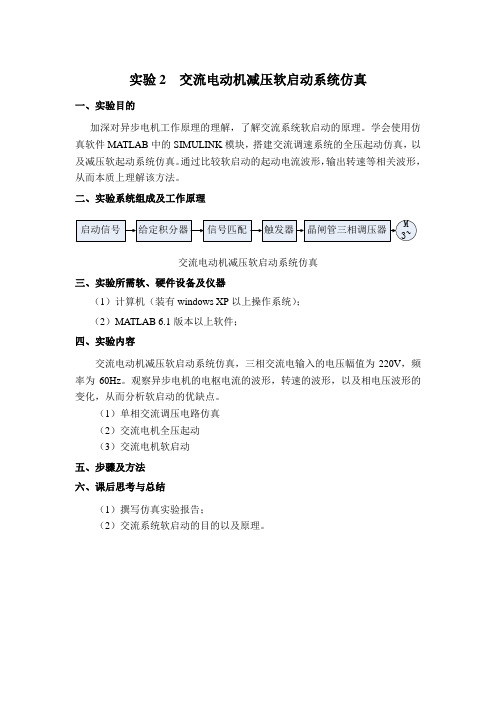
二、实验系统组成及工作原理
交流电动机减压软启动系统仿真
三、实验所需软、硬件设备及仪器
(1)计算机(装有windows XP以上操作系统);
(2)MATLAB 6.1版本以上软件;
四、实验内容
交流电动机减压软启动系统仿真,三相交流电输入的电压幅值为220V,频率为60Hz。
观察异步电机的电枢电流的波形,转速的波形,以及相电压波形的变化,从而分析软启动的优缺点。
(1)单相交流调压电路仿真
(2)交流电机全压起动
(3)交流电机软启动
五、步骤及方法
六、课后思考与总结
(1)撰写仿真实验报告;
(2)交流系统软启动的目的以及原理。
交流电动机调速系统仿真

第6页/共28页
• 5.2 转速开环恒压频比控制交流异步电动机调速系统仿真 1、恒压频比控制的交流异步电动机调速系统特点 在基频以下的调速过程中可以保持电动机气隙磁通基本恒定,在相同转矩条件下电动机的转 差率基本不变,所以电动机有较硬的机械特性,使电动机有较好的调速性能。 如果频率较低,定子阻抗压降所占比重较大,电动机难以保持气隙磁通不变,电动机的最大 转矩将随频率的下降而减小。为使电动机在低频低速时仍有较大的转矩,需要进行低频电压补偿。
第1页/共28页
5、仿真电路: 第2页/共28页
(1)主电路部分 三相对称电源、晶闸管整流桥、交流电动机、脉冲发生器 。
(2)控制电路部分 由Step,GI和Fcn模块组成,其中Step 给出阶跃起动信号,GI模块用于设定起动曲线,
函数Fcn用于使控制信号与触发器输入情号要求相匹配。
第3页/共28页
交流调速系统的仿真交流调速系统的仿真51交流电动机减压软起动系统仿真52转速开环恒压频比控制交流异步电动机调速系统仿真53空间矢量的坐标变换51交流电动机减压软起动系统仿真1降压软起动存在问题在有限供电系统中较大存量的交流电动机起动时由于起动电流过大会引起电网电压下降而影响其他用电设备的正常工作
• 5.1 交流电动机减压软起动系统仿真 1、降压软起动存在问题 在有限供电系统中较大存量的交流电动机起动时,由于起动电流过大,会引起电网电压下降,而 影响其他用电设备的正常工作。 2、传统的减压起动方法:星—三角起动和自耦变压器起动等。 3、现代的减压起动方法:应用晶闸管交流调压原理构造软起动器。 4、晶闸管软起动器的电气原理图
第25页/共28页
第26页/共28页
第27页/共28页
感谢您的观赏!
运动控制系统-课程设计-交流电动机减压软起动系统仿真
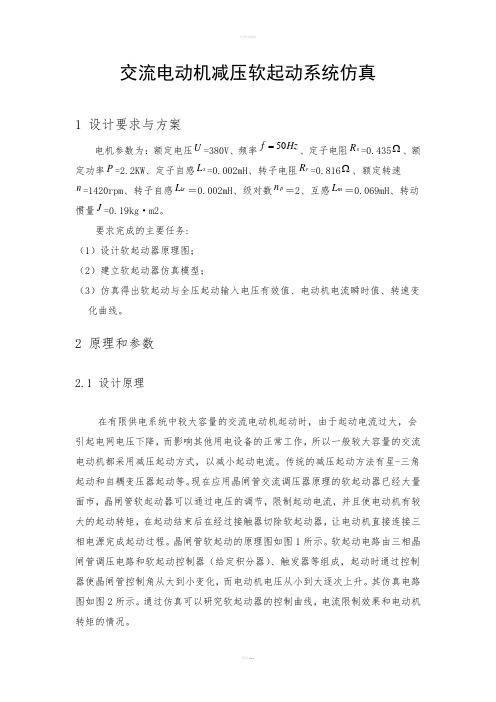
交流电动机减压软起动系统仿真1 设计要求与方案电机参数为:额定电压U =380V 、频率50f Hz =、定子电阻s R =0.435Ω、额定功率P =2.2KW 、定子自感s L =0.002mH 、转子电阻r R =0.816Ω、额定转速n =1420rpm 、转子自感l r L =0.002mH 、级对数p n =2、互感m L =0.069mH 、转动惯量J =0.19kg ·m2。
要求完成的主要任务:(1)设计软起动器原理图;(2)建立软起动器仿真模型;(3)仿真得出软起动与全压起动输入电压有效值、电动机电流瞬时值、转速变化曲线。
2 原理和参数2.1 设计原理在有限供电系统中较大容量的交流电动机起动时,由于起动电流过大,会引起电网电压下降,而影响其他用电设备的正常工作,所以一般较大容量的交流电动机都采用减压起动方式,以减小起动电流。
传统的减压起动方法有星-三角起动和自耦变压器起动等。
现在应用晶闸管交流调压器原理的软起动器已经大量面市,晶闸管软起动器可以通过电压的调节,限制起动电流,并且使电动机有较大的起动转矩,在起动结束后在经过接触器切除软起动器,让电动机直接连接三相电源完成起动过程。
晶闸管软起动的原理图如图1所示。
软起动电路由三相晶闸管调压电路和软起动控制器(给定积分器)、触发器等组成,起动时通过控制器使晶闸管控制角从大到小变化,而电动机电压从小到大逐次上升。
其仿真电路图如图2所示。
通过仿真可以研究软起动器的控制曲线,电流限制效果和电动机转矩的情况。
图1 晶闸管软起动的原理图图2 晶闸管软起动的仿真图2.2 双向晶闸管模块VT双向晶闸管模块VT如图3所示,参数默认。
图3 双向晶闸管模块VT起动信号给定积分器信号匹配触发器晶闸管三相调压器M3~2.3 触发器模块pusle触发器模块pulse如图4所示。
图4 触发器模块pulseRelay 、Relay1如图4左边部分所示,Rate Limiter、Rate Limiter1参数如图4右边部分所示,Relay2、Relay3参数默认。
直流调速系统设计及仿真和交流调压调速系统建模及仿真-电气工程及其自动化

电气与电子信息工程学院《控制系统课程设计》课程设计报告名称:直流调速系统设计及仿真和交流调压调速系统建模及仿真专业名称:电气工程及其自动化班级:级(专升本)班学号:姓名:指导教师:设计地点:课程设计任务书2014~2015学年第一学期学生姓名:专业班级:电气工程及其自动化级专升本班指导教师:工作部门:电气教研室一、课程设计题目:直流调速系统设计及仿真和交流调压调速系统建模及仿真二、设计目的:《控制系统课程设计》是继“自动控制系统”课之后开设的实践性环节课程。
由于它是一门理论深、综合性强的专业课,单是学习理论而不进行实践将不利于知识的接受及综合应用。
本课程设计将起到从理论过渡到实践的桥梁作用,通过该环节训练达到下述教学目的:1、通过课程设计,使学生进一步巩固、深化和扩充在交直流调速及相关课方面的基本知识、基本理论和基本技能,达到培养学生独立思考、分析和解决问题的能力。
2、通过课程设计,让学生独立完成一项直流或交流调速系统课题的基本设计工作,使学生熟悉设计过程,了解设计步骤,达到培养学生综合应用所学知识能力、培养学生实际查阅相关设计资料能力的目的、培养学生工程绘画和编写设计说明书的能力。
3、通过课程设计,提高学生理论联系实际,综合分析和解决实际工程问题的能力。
通过它使学生理论联系实际,以实际系统作为实例,对系统进行分析设计,掌握控制系统设计必须遵循的原则、基本内容、设计程序、设计规范、设计步骤方法及系统调试步骤。
通过设计培养学生严肃认真、一丝不苟和实事求是的工作作风。
培养学生的创新意识和创新精神,为今后走向工作岗位从事技术打下良好基础。
三、课程设计内容(含技术指标)1.直流调速系统设计及仿真题目和设计要求不可逆直流调速系统设计:设计数据:直流电机额定功率P N=10KW;额定电压UN=220V, 额定电流I N=55A,极对数2P=4,转速n N=1000r/min;电枢电感L D=7mH;电枢电阻Ra=0.5Ω ,励磁电压U L=220V, 励磁电流I L=1.6A;要求系统调速范围D=10,S≤ 5%,电流脉动系数Si≤10%。
交流电动机减压软起动
摘要三相交流异步电动机因其结构简单、运行可靠、维护方便、价格低廉等优点而广泛应用于商业、工农业生产、国防和日常电气设备中。
随着现代工业技术和生产工艺的发展,人们对电机的起动控制要求越来越高。
传统的降压起动方式因不能真正消除电流冲击,已经无法满足工业生产的需要。
软启动器的问世则解决了上述难题,他平滑了电机的起动过程,消除了电流冲击,真正实现了电机的无级起动控制。
本文利用MATLAB软件进行了系统仿真。
掌握了电机在不同起动方式下电流、电压和转矩参数的变化规律。
仿真结果验证了设计思路的正确性,为以后的软硬件设计打下了理论基础。
关键字:异步电机软启动MATLAB目录1.设计任务及要求 (3)2.设计原理 (3)2.1传统软起动方式及适用场合 (3)2. 2晶闸管软起动器的性能 (4)2. 3软起动器的运行方式及选型 (4)2. 4电动机软起动器的几种起动方式 (6)3.设计方案 (8)4.设计方案的输出波形 (9)5.心得体会 (15)参考文献 (16)交流电动机减压软起动系统仿真1.设计任务及要求电机参数为:额定电压U=380V、频率50f Hz=、定子电阻s R=0.435Ω、额定功率P=2.2KW、定子自感s L=0.002mH、转子电阻r R=0.816Ω、额定转速n=1420rpm、转子自感l r L=0.002mH、级对数p n=2、互感m L=0.069mH、转动惯量J=0.19kg·m2。
要求完成的主要任务:(1)设计软起动器原理图;(2)建立软起动器仿真模型;(3)仿真得出软起动与全压起动输入电压有效值、电动机电流瞬时值、转速变化曲线。
2.设计原理2.1传统软起动方式及适用场合降压启动的目的是减小启动电流,但它同时也使启动转矩下降.对于重载启动,带有大的峰值负载的生产机械,就不能用这种方式启动。
传统的降压启动有以下几种方法:(1) 星形/三角形转换器:这种方法适用于正常运行时定子绕组采用△接法的电动机。
电动机智能软起动控制系统的研究与设计方案(PLC)

毕业设计论文题目电动机智能软起动控制系统的研究与设计<PLC)<院)系电气与信息工程系专业自动化班级0101班学号010*******学生姓名肖正导师姓名胡俊达(教授>完成日期2005年6月15日1 / 61湖南工程学院毕业设计<论文)任务书设计<论文)题目:电动机智能软起动控制系统的研究与设计(PLC>姓名肖正系别电气与信息系专业自动化班级 0101 学号 0106指导老师胡俊达教研室主任唐勇奇一、本任务及要求:针对大中型异步电动机起动时的冲击电流问题及各类降压起动的方式进行分析研究,设计出一种以可编程序控制器<PLC)为控制核心的软起动和保护系统。
该系统除了能完成软起动功能外,还应具有多种保护功能,如断相、短路、过流、漏电闭锁等,并对变频器用于软起动的安全同步切换问题进行探讨。
主要设计内容:1系统主电路原理图,元器件计算2系统的软、硬件设计二、进度安排及完成时间:3月7日-3月26日查阅资料、撰写文献综述、撰写开题报告。
3月27日-4月9日毕业实习、撰写实习报告。
4月10日-4月22日主要完成系统硬件构建的初步设计。
4月23日-5月10日修改系统硬件构建设计。
5月11日-5月20日完成系统的主电路设计与元器件计算。
5月21日-5月29日完成系统的软件设计。
5月30日-6月11日完成系统主电路原理图的绘制,撰写毕业设计说明书<论文)。
6月12日-6月16日修改、装订毕业设计说明书、指导教师评阅。
6月17日-6月20日毕业设计答辩<公开、分组答辩)。
2 / 61目录摘要ⅠAbstract (Ⅱ)第1章异步电动机及其起动方式1.1异步电动机 (1)1.1.1异步电动机概述 (1)1.1.2异步电动机全压直接起动的危害 (4)1.1.3异步电动机常用的起动方式 (6)1.2软起动概述 (7)1.2.1软起动的概念 (7)1.2.2软起动常用的起动方式 (9)1.2.3软起动的运行特点 (9)1.2.4软起动应用场合 (9)1.2.5几种大中型异步电动机软起动方式在高压电动机软起动应用中的综合比较 (9)第2章可编程序控制器及其特殊功能模块2.1可编程序控制器 (13)2.1.1可编程序控制器的概念及历史 (13)2.1.2可编程序控制器的主要特点 (13)2.1.3可编程序控制器最新发展趋势 (15)2.1.4可编程序控制器的工作原理 (15)2.1.5可编程序控制器的基本结构 (17)2.1.6可编程序控制器的I/O滞后现象 (18)2.1.7可编程序控制器编程语言的国际标准 (18)2.2可编程序控制器特殊功能模块 (20)2.2.1模拟量输入输出模块 (20)第3章 PID控制及其调节规律3.1 PID控制 (21)3.1.1 PID控制的概念 (21)3.1.2 PID控制的特点 (21)3.2 PID控制器 (22)3.2.1数字PID控制233.2.2 数字PID控制器的设计 (23)3.3 PLC的PID模块分析研究 (23)3.3.1 PID控制器设计及实现253.3.2现场实验校验26第4章系统原理及方案设计4.1 基于PLC的大中型软起动控制系统 (27)4.1.1 系统的基本工作原理及结构特点 (27)4.1.2系统原理分析 (28)4.2磁控式PLC电动机起动控制系统结构的研究与设计 (28)4.2.1系统原理及方案设计 (29)4.2.2 硬件设计 (30)9 / 614.2.3 软件编程 (31)4.3基于单台软起动器对多台异步电动机的软起动 (32)4.3.1主回路图 (32)4.3.2软件编制 (33)第5章大中型异步电动机变频—工频同步切换研究5.1变频器的输出切换方法分类 (35)5.2硬切换的危害及改进方法 (36)5.3同步切换(软切换> (38)5.4锁相控制 (38)5.5变频器旁路与软起动器的分析比较 (39)5.6同步切换问题小结 (40)结束语 (41)参考文献 (42)致谢 (44)附录A 基于PLC的磁控式软起动器的主程序 (45)附录B 基于单台软起动器对多台电动机实现软起动的主程序 (47)附录C PID运算主程序 (54)10 / 61电动机智能软起动控制系统的研究与设计摘要:本文阐述了PLC技术在大中型异步电动机软起动自动控制中的应用及其优越性,并给出了具体的实施办法。
交流电动机软启动分析与设计
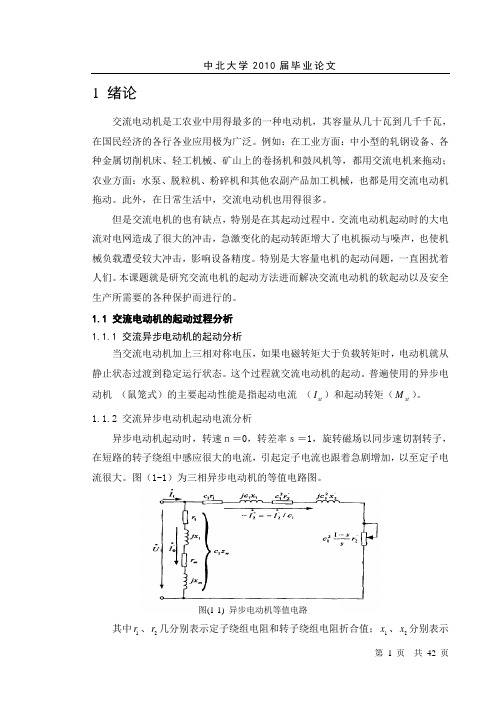
1 绪论交流电动机是工农业中用得最多的一种电动机,其容量从几十瓦到几千千瓦,在国民经济的各行各业应用极为广泛。
例如:在工业方面:中小型的轧钢设备、各种金属切削机床、轻工机械、矿山上的卷扬机和鼓风机等,都用交流电机来拖动;农业方面:水泵、脱粒机、粉碎机和其他农副产品加工机械,也都是用交流电动机拖动。
此外,在日常生活中,交流电动机也用得很多。
但是交流电机的也有缺点,特别是在其起动过程中。
交流电动机起动时的大电流对电网造成了很大的冲击,急激变化的起动转距增大了电机振动与噪声,也使机械负载遭受较大冲击,影响设备精度。
特别是大容量电机的起动问题,一直困扰着人们。
本课题就是研究交流电机的起动方法进而解决交流电动机的软起动以及安全生产所需要的各种保护而进行的。
1.1 交流电动机的起动过程分析1.1.1 交流异步电动机的起动分析当交流电动机加上三相对称电压,如果电磁转矩大于负载转矩时,电动机就从静止状态过渡到稳定运行状态。
这个过程就交流电动机的起动。
普遍使用的异步电动机 (鼠笼式)的主要起动性能是指起动电流 (st I )和起动转矩(st M )。
1.1.2 交流异步电动机起动电流分析异步电动机起动时,转速n=0,转差率s=1,旋转磁场以同步速切割转子,在短路的转子绕组中感应很大的电流,引起定子电流也跟着急剧增加,以至定子电流很大。
图(1-1)为三相异步电动机的等值电路图。
其中1r 、2r 几分别表示定子绕组电阻和转子绕组电阻折合值;1x 、2x 分别表示图(1-1) 异步电动机等值电路定子漏抗和转子漏抗折合值;m r 、'm x 为励磁电阻和励磁电抗;1I •为定子电流;'2I •三为转子电流折合值;'0I •为励磁电流;s为转差率。
由图可见(其中s=1,111m x c x =+),若忽略激磁电路。
可把起动时的异步电动机看成一个由电阻k r 和电抗k x 串联的电路,其中:21112k r c r c r =+; 21112k x c x c x =+;112f ωπ=。
三相交流调压调速系统设计与仿真

武汉理工大学华夏学院课程设计报告课程名称运动控制系统题目三相交流调压调速系统设计与仿真专业自动化班级1122学号姓名成绩 ________________________年_______ 月_______日目录课程设计任务书 (3)《运动控制系统》课程设计指导书 (5)摘要 (8)题目4: 三相交流调压调速系统设计与仿真 (8)1概述 (9)1.1电机发展概述 (9)1.2 交流调速系统的应用领域主要有三个方面: (9)1.3交流调速系统的分类 (10)2、异步电动机的机械特性 (10)2.1、异步电机固有机械特性 (10)2.2、异步电机调压调速的机械特性 (11)3、调压调速系统 (12)3.1调压电路 (12)3.2速度闭环控制的调压调速系统 (12)3.3 缺相保护 (14)4、Matlab仿真 (15)4.1调压电路仿真模型 (15)4.2参数设置 (15)4.3仿真总电路图 (16)4.4 仿真结果 (16)4.5结果分析 (17)5、小结 (18)参考文献 (18)武汉理工大学华夏学院信息工程系课程设计任务书课程名称:运动控制系统指导教师:李文彦班级名称:自动化1122 开课系、教研室:自动控制一、课程的性质、目的与任务课程设计是学习专业技术课所必需教学实践环节。
通过课程设计的教学实践,使学生所学的基础理论和专业知识得到巩固,并使学生得到运用所学理论知识解决实际问题的初步训练。
通过课程设计使学生利用所学理论知识和设计方法完成某种运动控制系统设计。
通过课程设计使学生掌握系统设计的步骤和一般方法,学会电路的设计,电器元件参数的计算、选型以及系统特性分析和评价标准。
掌握从收集资料、方案比较论证到电路设计、计算的整个设计过程,获得初步的实践锻炼,进一步提高学生的分析、综合能力。
二、课程设计内容及基本要求指导教师负责学生的分组与课题选题,下达课程设计任务书,指导、督促、检查学生课程设计的进行情况,并结合答辩情况负责课程设计完成后学生的成绩考核。
电机控制仿真课程设计

电机控制仿真课程设计一、课程目标知识目标:1. 理解电机控制的基本原理,掌握电机的主要参数及其影响;2. 学会使用电机控制仿真软件,完成电机启动、停止、正反转等基本控制操作;3. 掌握电机控制系统中常用传感器的工作原理及其在电机控制中的应用。
技能目标:1. 能够运用所学知识,设计简单的电机控制电路;2. 能够运用仿真软件对电机控制系统进行调试和优化;3. 能够分析电机控制过程中的问题,并提出相应的解决方法。
情感态度价值观目标:1. 培养学生对电机控制技术的兴趣,激发学生探索科学的精神;2. 培养学生的团队合作意识,提高沟通与协作能力;3. 增强学生的环保意识,认识到电机控制技术在节能减排方面的重要性。
课程性质:本课程为电机控制技术的实践应用课程,以理论教学和实践操作相结合的方式进行。
学生特点:学生具备一定的电机原理及控制理论知识,对实际操作具有较强的兴趣。
教学要求:注重理论联系实际,提高学生的动手能力,培养学生解决实际问题的能力。
将课程目标分解为具体的学习成果,以便在教学过程中进行有效评估。
二、教学内容1. 电机控制原理回顾:讲解电机的基本工作原理,重点复习电机的主要参数及其对性能的影响,涉及课本第3章内容。
2. 电机控制仿真软件介绍:介绍仿真软件的功能、操作界面及基本操作方法,使学生熟悉仿真环境,对应课本第5章相关内容。
3. 基本控制电路设计:讲解并演示电机启动、停止、正反转等基本控制电路的设计方法,结合课本第4章实例进行分析。
4. 传感器在电机控制中的应用:介绍常用传感器的工作原理,以及如何在电机控制系统中进行应用,涉及课本第6章相关内容。
5. 电机控制电路仿真与优化:指导学生运用仿真软件对设计好的控制电路进行调试与优化,提高电机控制性能,结合课本第7章内容进行实践。
6. 故障分析与解决方法:分析电机控制过程中可能出现的故障,探讨解决方法,对应课本第8章故障诊断部分。
教学安排与进度:共6课时,每课时50分钟。
基于LM3108K的交流电动机软启停实验系统设计
基于LM3108K的交流电动机软启停实验系统设计周震【摘要】采用和利时LM小型PLC LM3108K为核心,对实验室环境中小功率三相交流电动机提出电压斜坡软启停实验系统.该实验系统配有磁粉制动器作为可调负载,结合智能三相调压模块调压输出,能够对小功率三相交流电动机软启动和软停车进行实验控制演示,实验效果良好.【期刊名称】《机电工程技术》【年(卷),期】2019(048)003【总页数】5页(P85-88,97)【关键词】LM3108K;电压斜坡软启停;磁粉制动器;智能三相调压模块【作者】周震【作者单位】四川师范大学工学院,四川成都 610101【正文语种】中文【中图分类】TM3060 引言交流电动机在全压直接启动过程中,启动电流可以达到额定电流的4~8倍,但启动转矩仅达到额定转矩的0.5~1.5倍。
为了限制启动电流对电动机自身及电网的影响,采用软启动控制方式得到了普遍的应用[1-4]。
电压斜坡启动方式是一种典型的开环控制方式,通过预先设定好的电压变化曲线,控制晶闸管交流调压输出按照变化曲线规律变化[5-7]。
电压斜坡方式软启动电压/电流曲线图如图1所示。
电压一般不从0开始启动,而是根据交流电动机负载情况从能够使交流电动机运转的最小电压即初始电压U0开始。
按照一定的斜坡上升斜率,经过一定的斜坡启动时间,电压达到交流电动机的额定电压Ue,交流电动机的软启动过程完成。
斜坡曲线可以采用单段或多段斜坡曲线规律变化,在图中给出了2段不同斜率的斜坡电压曲线。
根据交流电动机负载情况从能够使交流电动机运转的最小电压即初始电压U0开始,按照一定的斜坡上升斜率,经过一定的斜坡启动时间,电压达到交流电动机的额定电压Ue,交流电动机的软启动过程完成。
斜坡曲线可以采用单段或多段斜坡曲线规律变化,在图1中给出了2段不同斜率的斜坡电压曲线。
在电压斜坡软启动的过程中,还可以附加采用电压突跳控制方式共同实现交流电动机的软启动。
在图1中,tk时间段对应于交流电动机的定子电压快速突增值一定的电压值并保持该数值。
交流电动机Y—△降压启动控制程序课程设计报告
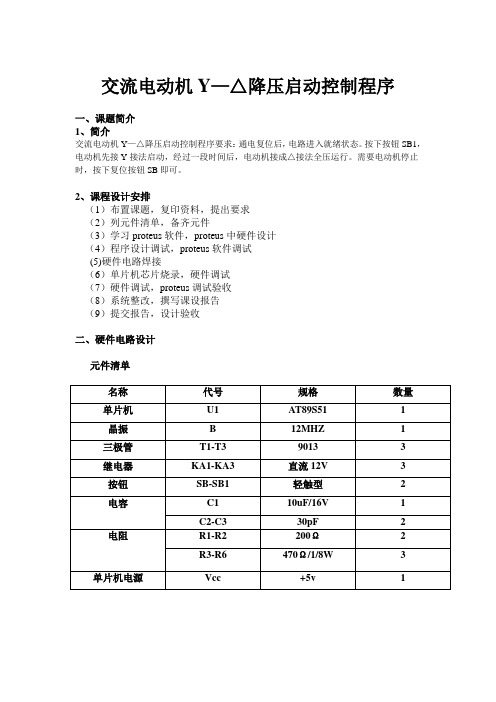
交流电动机Y—△降压启动控制程序一、课题简介1、简介交流电动机Y—△降压启动控制程序要求:通电复位后,电路进入就绪状态。
按下按钮SB1,电动机先接Y接法启动,经过一段时间后,电动机接成△接法全压运行。
需要电动机停止时,按下复位按钮SB即可。
2、课程设计安排(1)布置课题,复印资料,提出要求(2)列元件清单,备齐元件(3)学习proteus软件,proteus中硬件设计(4)程序设计调试,proteus软件调试(5)硬件电路焊接(6)单片机芯片烧录,硬件调试(7)硬件调试,proteus调试验收(8)系统整改,撰写课设报告(9)提交报告,设计验收二、硬件电路设计元件清单名称代号规格数量单片机U1 AT89S51 1晶振 B 12MHZ 1三极管T1-T3 9013 3继电器KA1-KA3 直流12V 3按钮SB-SB1 轻触型 2电容C1 10uF/16V 1C2-C3 30pF 2 电阻R1-R2 200Ω 2R3-R6 470Ω/1/8W 3 单片机电源Vcc +5v 1单片机设计流程图:是否有按键下?Y延时再次检测是否有按键下?NY符合正转条件吗?符合正转条件吗?反转停止正转启动正转停止反转启动NNYY 开始端口定义三:程序设计bzf equ 30han bit p3.7k1sck bit p0.0 kysck bit p0.1 kxsck bit p0.2 org 0000h mov p0,#00H mov bzf,#00h main:jb an,tzcllcall delayjb an,tzclinc bzfzzcl:mov a,bzfcjne a,#01h,tzcl yx:clr kxscksetb k1sck setb kyscklcall zxcclr kyscksetb kxsckSJMP maintzcl:mov a,bzfcjne a,#02h,fhmainclr k1sckclr kysckclr kxsckmov bzf,#00hsjmp mainfhmain:ljmp maindelay:mov r3,#20xh:mov r4,#48djnz r4,$djnz r3,xhzxc:mov r7,#50del1:mov r6,#66del2:mov r5,#251del3:djnz r5,del3djnz r6,del2djnz r7,del1retend四:调试结果1,课设结论:课题仿真、实物效果与预期的一样,按照程序驱动进行 2,实物照片:感想:两周的单片机课程设计,让我有了很多体会与感想,我做的是Y—△降压启动控制程序,我们有这方面的资料和程序,在此基础上只需通过改动就可以实现,在课程设计中,遇到了好多的问题,首先,对于单片机还是没有掌握的太好,许多程序需要参考资料和询问他人,还有在proteus中对于搜寻件,有的不知道什么字母代表这个元件,还有就是在接线时,元件的正负极没有把握好导致仿真出错。
三相交流电动机的软启动分析与仿真
三相交流电动机的软启动分析与仿真软启动主要通过降低启动时的电压和频率来实现。
传统的直接启动方式会引起电压和电流瞬间急剧上升,容易造成电动机和电网设备的损坏。
而软启动通过逐渐调节电压和频率,使电机启动过程更加平稳,减少冲击。
软启动主要有两种方式:调压型启动和调频型启动。
调压型启动通过调节启动电压的幅值来实现启动过程,从而控制电流的上升速率。
调频型启动则是通过改变启动电压的频率,来控制电压和电流的上升速率。
两种方式各有优劣,根据具体的应用场景可以选择合适的方式。
软启动的控制电路通常由微处理器或可编程逻辑器件实现,通过与电动机主回路相连接,实时监测电机的运行状态和输入电压,并根据设定的启动曲线进行调节。
在启动过程中,软启动控制器会逐渐增加或减小输出电压和频率,以实现平稳的启动。
同时还可以保护电动机和电网设备免受过电流和过压等问题的影响。
仿真软件常用于模拟和分析软启动的性能。
在仿真中,可以对不同的软启动策略和参数进行模拟,以评估其对电动机启动状态和电网负荷的影响。
仿真还可以通过改变不同因素,如负载大小、电网电压波动等,来研究软启动的适应性能。
软启动在电机启动过程中发挥了重要作用,可以减少电动机起动时的冲击和峰值电流,延长电动机和电网设备的使用寿命,提高系统的可靠性。
同时,软启动还可以降低系统的运行成本,减少能源消耗,保护环境。
综上所述,软启动是一种通过调节电压和频率实现电动机平稳启动的方法。
通过分析和仿真软启动的性能,可以根据具体需求选择合适的启动方式和参数,提高系统的运行效率和可靠性。
交流电机软启动的技术原理与仿真

交流电机软启动的技术原理与仿真摘要本文首先阐述了交流电机的直接启动,论述了直接启动的危害如电网冲击,机械冲击,对生产机械的冲击等,叙述了交流电机直接启动的限制条件;并且将交流电机的直接启动和软启动进行比较,得出了软启动对电网冲击小,转矩冲击小且减少了对机器本身的损坏等优点。
其次详细论述了几种主要的交流电机降压启动原理。
在这基础上详述了软启动的启动原理,给出了限流软启动、电压斜坡启动、转矩控制启动、转矩加突跳控制启动、电压控制启动等几种启动方法和曲线图。
然后分别对每种启动方式的优缺点进行了说明,得出了比较好的启动方式是电压控制启动、转矩控制启动和转矩加突跳控制启动,并且对变频调速做了浅谈使之与软启动进行比较得出了软启动的优缺点。
再次借助Matlab/Simulink工具箱和电气系统模块库(Power System Blockset)对交流电机的软启动过程进行仿真研究,建立了三相交流电压环节模块、同步环节模块、脉冲发生模块、三相交流调压模块、电机及测量模块、电流反馈、启动控制和电机切换等环节封装模块,构建了完整的仿真系统模型,并分析了每个模块的建立过程,参数设定及基本功能,给出了仿真结果,并对结果进行了分析和验证。
最后归纳总结目前软启动技术的特性,指出目前软启动产品开发应考虑的因素以及软启动的发展,软启动的节能。
关键字:交流电机,软启动,仿真,matlab,节能Simulating and Analysis about Soft-starting Theory of InductionMotorABSTRACTThis article first elaborated the alternating current machine line start, elaborated the line start harm like electrical network impact, the machinery impact, to produces the machinery to have the impact and so on, narrated the alternating current machine line start limiting condition; And the alternating current machine line start and the soft start will carry on the comparison, obtained the soft start to the electrical network impact, the torque has attacked small also reduced to machine itself merit and so on damage.Next in detail elaborated several kind of main alternating current machine voltage dropping resistor start principle, has related in detail the soft start start principle in this foundation, gave has limited flows the soft start, the voltage pitch starts, the torque control started, torque Canada kicked the control to start, voltage control start and so on several start methods and diagram of curves, Has separately carried on the explanation to each kind of start way good and bad points, has obtained the quite good start way is the voltage control starts, the torque control start and torque Canada kicks the control start.Draws support from the Matlab/Simulink toolbox and the electrical system module storehouse once more (Power System Blockset) conducts the simulation research to the alternating current machine soft start process, Established the three-phase AC voltage link module, the synchronized link module, the pulse has had the module, the three-phase AC accent pressed the module, the electrical machinery and the survey module, the current feedback, link seal modules and so on start control and anxious link, Has constructed the integrity simulation system model, and has analyzed each module establishment process, the parameter hypothesis and the basic function, has given the simulation result, and has carried on the analysis to the result, the confirmation.Finally induces the summary at present the soft start technology characteristic, pointed out the present soft start product development should consider factor as well as soft start development, soft start energy conservation, and did to the frequency conversion velocity modulation discussed shallowly caused it to carry on the comparison with the soft start to obtain the soft start good and bad points.KEKWORDS: AC motor,Soft-starting,simulating,matlab,energy saving目录摘要 (I)ABSTRACT (II)1 交流软启动概述 (1)1.1 交流电机启动方式简介 (1)1.1.1 交流电机直接启动的弊端及限制条件 (1)1.1.2 传统的启动技术 (2)1.1.3 晶闸管软启动技术 (3)1.1.4 交流电机启动方式选择 (3)1.2 型异步电动机减压启动方法 (4)1.2.1 定子串电阻或电抗器减压启动 (4)1.2.2 自耦变压器降压启动 (5)1.2.3 星形-三角形(Y-△)启动 (7)1.3 变频软启动的原理及应用 (7)1.3.1 变频软启动的基本结构 (8)1.3.2 变频软启动的工作原理 (8)1.4 变频软启动与软启动的比较 (10)2 晶闸管软启动技术原理与节能 (11)2.1晶闸管软启动技术原理 (11)2.2软启动节能技术及原理与软启动智能化发展 (14)2.2.1 异步电动机中的损耗 (14)2.2.2 异步电动机的节能原理 (14)2.2.3 软启动智能化发展 (16)2.3软启动行业现状及发展方向 (17)2.3.1 软启动行业现状 (17)2.3.2 软启动的发展方向 (17)3 MATLAB/SIMULINK工具箱的简介 (19)3.1 MATLAB简介 (19)3.2S IMULINK工具箱简介: (21)3.3电力系统模型库(SIMPOWERSYSTERM)工具箱简介 (23)4 交流电机软启动系统仿真建模 (24)4.1交流电动机数学模型 (24)4.1.1 异步电动机在α,β,0 坐标系统下的数学模型 (24)IV4.1.2 异步电机在d,q,0坐标系统下的数学模型 (25)4.2交流电机软启动基本模块仿真 (26)4.3交流电机软启动系统仿真 (30)5 交流电机软启动系统仿真分析 (31)5.1SIMULINK仿真分析 (31)5.1.1 转速 (31)5.1.2 转矩 (31)5.1.3 定子电流 (32)5.1.4 转子电流 (33)5.1.5 脉冲图像 (33)5.1.6 触发角alpha的变化 (34)5.1.7 电压 (34)5.2 分析小结 (35)6 总结 (36)致谢 (36)参考文献 (38)交流电机软启动的技术原理与仿真 11 交流软启动概述1.1 交流电机启动方式简介交流电动机广泛应用于各行各业,但传统电机的直接启动、停止制动方式存在许多缺陷。
毕业设计-基于MATLAB-SIMULINK的交流电动机调速系统仿真.(DOC)
1 绪论1.1课题研究背景及目的1.1.1 研究背景直流调速系统的主要优点在于调速范围广、静差率小、稳定性好以及具有良好的动态性能。
在相当长时期内,高性能的调速系统几乎都是直流调速系统。
尽管如此,直流调速系统却解决不了直流电动机本身的换向和在恶劣环境下的不适应问题,同时制造大容量、高转速及高电压直流电动机也十分困难,这就限制了直流拖动系统的进一步发展。
交流电动机自1985年出现后,由于没有理想的调速方案,因而长期用于恒速拖动领域。
20世纪70年代后,国际上解决了交流电动机调速方案中的关键问题,使得交流调速系统得到了迅速的发展,现在交流调速系统已逐步取代大部分直流调速系统。
目前,交流调速已具备了宽调速范围、高稳态精度、快动态响应、高工作效率以及可以四象限运行等优异特性,其稳、动态特性均可以与直流调速系统相媲美。
与直流调速系统相比,交流调速系统具有以下特点:(1)容量大;(2)转速高且耐高压;(3)交流电动机的体积、重量、价格比同等容量的直流电动机小,且结构简单、经济可靠、惯性小;(4)交流电动机环境使用性强,坚固耐用,可以在十分恶劣的环境下使用;(5)高性能、高精度的新型交流拖动系统已达同直流拖动系统一样的性能指标;(6)交流调速系统能显著的节能;从各方面看,交流调速系统最终将取代直流调速系统。
1.1.1研究目的本课题主要运用MATLAB-SIMULINK软件中的交流电机库对交流电动机调速系统进行仿真,由仿真结果图直接认识交流系统的机械特性。
本文重点对三相交流调压调速系统进行仿真研究,认识PID调节器参数的改变对系统性能的影响,认识该系统动态及静态性能的优劣及适用环境。
1.2 文献综述在实际应用中,电动机作为把电能转换为机械能的主要设备,一是要具有较高的机电能量转换效率;二是应能根据生产机械的工艺要求控制和调节电动机的旋转速度。
电动机的调速性能如何对提高产品质量、提高劳动生产率和节省电能有着直接的决定性影响。
电机软起动课程设计
图 1.2.2 相控调压触发角示意图 利用相控调压,可以使得输出在负载上的电压按照α角的变化而变化,进而 实现了电机的降压启动。
Hale Waihona Puke 图 1.2.3 主电路电路图
1.3 主电路调试过程
首先我们小组依据指导书上电路图,对主电路板进行细致排查,验证有无错 线与虚焊现象。排查完后我们开始连接电源模块、驱动板与主电路板,测试驱 动 A 相,B1 相,B2 相,C 相脉冲正确与否。经数次实验,发现 B 相时常无输 出。这是我小组在本次实验中遇到的最大难题,也是伴随我们小组最久的一个 问题。我们小组采取借用别组的主电路板来进行实验,发现问题依旧存在,说 明该问题的产生与主电路板无关。该问题解决之后,开始全部联调时,又出现 某相无输出情况,无奈之下,本小组将主电路板上所有的四个晶闸管全部更 换。之后,波形显示正常。
1.主电路模块
1.1 降压起动原理
降压起动的目的:降低起动电流 Ist。 为什么要降压启动:交流电机轻载时降压运行,可以提高电机效率,避免大 马拉小车现象,节约了电能。 降压后的机械特性: Tm U12 , Tst U12 ,见图 1.1。
图 1.1.1 感应电机机械特性
图 1.1.2 电机软启动主电路
1.2 双向晶闸管的相控调压
普通晶闸管:两个普通晶闸管反并联,输入两路脉冲。 双向晶闸管(KS):两个主电极 T1、T2,一个门极 G。通常在 G-T2 之间加入触 发脉冲,使其导通。
图 1.2.1 单双向晶闸管示意图
触发脉冲的时序波形及相控电压波性:触发脉冲经过高频调制,以减小脉冲 变压器的体积。 相控调压的缺点:功率因数低,电流非正弦对电网有谐波污染。 软起动:电机刚起动时较大。逐渐减小,转速接近稳态时=0。的调压 可控范围:~180。
三相交流电动机的软启动分析与仿真

第1章绪论第1章绪论笼式异步电动机是工业企业应用最广泛的用电设备。
对于容量较大的电动机,如果采用直接启动,则启动时冲击电流很大,将会对电网及其他负载造成干扰甚至危害电网的安全运行。
因此,对大容量的笼式异步电动机,不能采用直接启动方式。
以往采用降压启动方式,减少启动电流,早期的启动方式有:串联电抗或电阻,星——三角转换,串联自耦变压器等。
作为异步电动机的启动设备——软启动器,利用晶闸管交流调压技术制作,从20世纪70年代开始推广应用,同时, 由单片机作为控制电路的软启动器还可以将软启动、软制动、轻载节能技术和缺相、过载、短路、漏电等保护措施融于一体,因而具有广阔的应用前景。
1.1对电机软启动技术的要求异步电动机在直接启动过程中, 自电源流入定子绕组的电流可达其额定电流的7 倍以上, 这种大的冲击电流容易造成电网电压显著下降, 这不仅使电动机起动转矩减小(起动转矩与电源电压的平方成正比)而启动困难, 还会影响接在同一电网的其它用电设备, 如使附近照明灯变暗, 附近正在工作的其他异步电动机的转矩减少, 转速下降等, 尤其是大容量电动机, 由于其起动电流较大, 起动时间较长, 对同一电网的其它用电设备影响更大。
传统的电机软启动技术主要是为了缓解或消除由于电机启动力矩过大对电气系统、机械设备和工艺系统所造成的影响和损害,使其能够安全稳定运行。
随着工业科学技术的发展和社会需求的增加,人们对转动设备的启动和运行以及到停止全程的平稳性、机械稳定性、工艺上的精密性要求更高,同时对设备的节能和操作控制上的现代化水平要求的更高,人们希望电机的启动和停止要柔软,运行安全、经济、可靠,适应性强、配置灵活,实现电机驱动的精密控制、精密调整目前的电机软启动器、变频器、串级调速等技术,从根本上改变了传统的单一的降压或限流的电气接线方式和控制原理,实现了对电机启动到停止的全过程的电压、电流、相位和频率的控制和调整。
使启动过程中的电机得到有效控制,特别是,变频调速和串级调速实现了对电机运行速度根据负荷要求进行调整,实现了人们对电机软启动的各项要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
&
交流电动机减压软起动系统仿真
1 设计要求与方案
电机参数为:额定电压U =380V 、频率50f Hz =、定子电阻s R =Ω、额定功率P =、定子自感s L =、转子电阻r R =Ω、额定转速n =1420rpm 、转子自感l r L =、级对数p n =2、互感m L =、转动惯量J =·m2。
要求完成的主要任务: (1)设计软起动器原理图; (2)建立软起动器仿真模型;
(3)仿真得出软起动与全压起动输入电压有效值、电动机电流瞬时值、转速变化曲线。
@
2 原理和参数
设计原理
在有限供电系统中较大容量的交流电动机起动时,由于起动电流过大,会引起电网电压下降,而影响其他用电设备的正常工作,所以一般较大容量的交流电动机都采用减压起动方式,以减小起动电流。
传统的减压起动方法有星-三角起动和自耦变压器起动等。
现在应用晶闸管交流调压器原理的软起动器已经大量面市,晶闸管软起动器可以通过电压的调节,限制起动电流,并且使电动机有较大的起动转矩,在起动结束后在经过接触器切除软起动器,让电动机直接连接三相电源完成起动过程。
晶闸管软起动的原理图如图1所示。
软起动电路由三相晶闸管调压电路和软起动控制器(给定积分器)、触发器等组成,起动时通过控制器使晶闸管控制角从大到小变化,而电动机电压从小到大逐次上升。
其仿真电路图如图2所示。
通过仿真可以研究软起动器的控制曲线,电流限制效果和电动机
转矩的情况。
图1 晶闸管软起动的原理图
图2 晶闸管软起动的仿真图
双向晶闸管模块VT
]
双向晶闸管模块VT 如图3所示,参数默认。
起动信号 给定积分器 信号匹配 触发器
【
晶闸管 三相调压
M 3~
图3 双向晶闸管模块VT
触发器模块pusle
触发器模块pulse如图4所示。
图4 触发器模块pulse
;
Relay 、Relay1如图4左边部分所示,Rate Limiter、Rate Limiter1参数如图4右边部分所示,Relay2、Relay3参数默认。
图4 触发器模块参数
给定积分器模块GI
给定积分器模块GI如图5所示,参数默认。
图5 给定积分器模块
模型的控制部分
&
模型的控制部分如图6所示,由Step、GI和Fcn三个模块组成,其中Step 给出阶跃起动信号,GI模块用于设定起动曲线,函数Fcn用于使控制信号与触发器输入信号要求相匹配,匹配关系为
F[u(1)]=(1)
式中,为能使电动机起动的最小控制电压,u(1)为给定积分器输出。
图5 模型的控制部分
交流电机直接起动
直接起动仿真图如图6所示。
%
图6 交流电机直接起动仿真图
3 仿真波形分析
软起动波形如图7、图8、图9图10、图11、图12所示。
由波形图可以看出,软起动开始时电流较大,稳定后较小。
同时在起动瞬间也有较大毛刺,大概有100A。
图7 软起动电机定子电流ia
图8 软起动电机定子电流ib
<
图9 软起动电机定子电流ic
图10 软起动电机转速曲线
从转速曲线可以看出,电机转速平稳上升,波动很小,最后稳定在1420rpm,但同时,电机起动过程较慢,从起动到转速稳定,需要大概的时间。
与直接起动相应波形相比较,优势很明显。
图11 软起动电机电磁转矩曲线
图12 软起动电机输入电压有效值
^
由图,电磁转矩曲线和电机输入电压有效值曲线有较多毛刺。
电机直接起动波形如图13、图14、图15、图16、图17、图18所示。
图13 直接起动电机定子电流ia
图14 直接起动电机定子电流ib
图15 直接起动电机定子电流ic
~
图16 直接起动电机转速曲线
图17 直接起动电机电磁转矩曲线
图18 直接起动电机输入电压有效值
设计心得
这次课程设计,题目要求难度并不大,原理上容易理解。
但实际在MATLAB 仿真的过程中我遇到了很多问题:
首先在搭建模型时,对各模块不是很熟悉,但参照了相关书籍后,最终还是顺利地搭建起来了模型。
其次在触发器模块,对参数没有有效设定,导致仿真没有得出预期结果,后来仔细学习老师提供的参考书籍,从单相调压仿真开始学习,弄清调压原理,得到正确的参数配置后,应用到三相电机减压软起动仿真中,最后仿真得到较好的效果。
还有此次课程设计中,小组成员之间有效分工,有的负责资料搜集,有的负责文档编辑,有的负责仿真,最后在大家的共同努力下终于得到满意的仿真结果,加强了团队成员之间的相互信任感。
此次课程设计巩固了运动控制系统中交流电机减压软起动的理论知识,还提升了自己运用MATLAB分析问题的能力,最重要的是锻炼了自己发现问题解决问题的能力。
参考文献
[1]陈伯时.运动控制系统.北京:机械工业出版社,2009
[2]王云亮.电力电子技术.北京:电子工业出版社,2009
[4] Yamamura Motor for High-performance Applications(Analysis
Control).New York:Newyork Marcel Dekker,1986
[4]刘淳.matlab在运动控制系统中的应用.北京:电子工业出版社,2008
[5]许镇琳.运动控制系统matlab仿真.北京:电子工业出版社,2010
[。