混合动力客车电控系统应用与设计
混合动力车辆的机电一体化控制技术研究

混合动力车辆的机电一体化控制技术研究一、引言随着能源和环保问题的日益加剧,混合动力车辆逐渐成为了当今汽车行业发展的热门课题之一。
混合动力车辆有效地将内燃机和电动机的优点结合起来,不仅具有较高的燃油效率,还能够减少尾气排放量,降低对环境的污染。
在此背景下,混合动力车辆的机电一体化控制技术研究成为了当前汽车行业研究的重点之一。
二、混合动力车辆的机电一体化控制技术概述混合动力车辆采用了机电一体化的控制技术,充分利用了内燃机和电动机的优点,将两者的动力输出进行协同控制,使整个系统性能得到了极大提升。
机电一体化控制技术主要包括电池管理系统、电机控制系统、液压控制系统和整车控制系统等。
(一)电池管理系统混合动力车辆中的电池管理系统是整个系统的核心,负责控制电池的充放电过程,确保电池的正常运行。
电池管理系统主要包括电池状态监测、温度控制、过充保护和过放保护等功能。
(二)电机控制系统电机控制系统负责控制电机的转速、转矩和输出功率等参数,实现电机与内燃机的协同工作。
电机控制系统主要包括电机驱动器、电机控制器和电机测速系统等。
(三)液压控制系统液压控制系统负责控制混合动力车辆的变速系统、制动系统和转向系统等,保证整个系统具有更好的性能和可靠性。
液压控制系统主要包括变速器、离合器、刹车系统和转向系统等。
(四)整车控制系统整车控制系统是混合动力车辆中最重要的控制系统,它负责整个系统的协调控制和故障诊断。
整车控制系统主要包括动力分配系统、能量回收系统和排放控制系统等。
三、机电一体化控制技术在混合动力车辆中的应用混合动力车辆的机电一体化控制技术在汽车行业中的应用非常广泛,已经成为了主流技术之一。
采用机电一体化控制技术的混合动力汽车能够实现更高的能源利用率和更低的污染排放,这也是汽车行业不断推广混合动力车辆的原因之一。
1.增强动力性能混合动力车辆的机电一体化控制技术可以充分利用电机的高扭矩输出,弥补内燃机低扭矩输出的不足,从而提高了车辆的动力性能。
电子控制液压动力转向技术在混合动力客车上的应用

a 1 a p l aino eh b dp we lcrcmoo o c . swe1 sa p i t nt y r o ree t tr ah c o h i i c
Ke wo d : e to i- n o ld Hy a l o rAs i e t e i g Te h o o y; ssa c a a t r y r s Elc r n c Co t l d u i P we - ss d S e r c n l g As itn e Ch r c e ; r e r c t n P we l c i o o u ; p i ai n o r e t cM t rB s Ap l to E r c Hy r b d i
之 间是 一对 很难 兼 顾 的矛盾 。 即在 车辆 低 速 行 驶 结构 进行 了改进 ,在 阀 内增 加 了旁通 油路 ,使进 入 时,转 向阻力较 大 ,需要较 大 的转 向助力 。转 向助 转 向器 的液压 油从进 油 口流进 , 经过 旁通控 制 油路 力泵 的流量 要满 足低速 时的要求 。 当车辆 在 高速 后 ,再从转 向器 的 出油 口流 出。 而 行驶 时 ,需要较 好 的转 向灵敏 性和行 驶稳 定性 。而
a t l i l to u i g t ee e t n c c n r l d h d a l s it n e se r g g a o o i o , h o y, h r c e ri e i man y i r d cn l c o i — o to l y r u i a ssa c t e n e rc mp st n t e r c a a tr c s n h r e c i i
18 m油电混合动力客车CAN网络架构设计与应用
De s i g n a nd Ap pl i c a t i o n o f CAN Bus Ne t wo r k Ar c h i t e c t ur e t o 1 8 m Oi l a n d El e c t r i c i t y Hy br i d BU S
e a s i l y r e a l i z e d i n a n e w wa y . Ke y wo r ds :l 8 m a r t i c u l a t e b u s ; o i l a n d e l e c t r i c i t y h y b r i d ; CAN n e t wo r k a r c h i t e c t u r e
关键 词 : 1 8 1 1 1 铰 接 客 车 :油 电混 合 动 力 ;C AN 网络 结构
中图分类号 : U4 6 9 . 7 2 ; U4 6 3 . 6 2
文献标 志码 : B
文章编号 : 1 0 0 6 — 3 3 3 1 ( 2 ( ) 1 4 ) 0 1 一 ( ) 0 4 4 — 0 4
2 0 1 2年宇通客车研 发的 l 8 1 T I 油 电混合 动力客车是
一
整车 电子电器架 构 , 使整 车电气 系统 在性 能 、 成本 等
面达到最 优化 , 可 以较好 地适应平 台中各个车型 的不 同
款深度混合 动力城 市客车 ,主要运 营在 B R T快 速公
配置需 求 , 方便平 台扩展 、 节省开发 费用 。 电子 电器架构
电子 电器架构是一 个通用化 的平 台 , 表现为各个 电 子 电器部 件之 间的关 系 , 包 含部件功 能 、 部 件位置 以及
他f 『 】 之问的联 系。根据 整车配置和 系统 功能 , 划分设计
新能源汽车——电动汽车动力及控制技术设计_毕业设计论文
济南职业学院毕业设计(论文)题目:新能源汽车电动汽车动力及控制技术设计系部:机械系济南职业学院毕业论文(设计)任务书课题名称:电动汽车动力及控制技术设计系部:_机械系专业:汽车检测与维修__________ 姓名:_ 学号:指导教师:_ 二〇一一年4月25 日毕业设计(论文)成绩评定表系部:机械系专业:汽车检测与维修班级:1班注:设计(论文)总成绩=指导教师评定成绩(30%)+评阅人评定成绩(30%)+答辩成绩(40%)新能源汽车电动汽车动力及控制技术设计摘要随着世界环境的污染、全球石油危机日益严重而带动的石油价格不断上涨给汽车工业带来了不可忽视的冲击,也增强了人们开发新能源的意识,而新能源汽车更是人们关注的一大焦点。
目前电瓶式纯电动汽车以噪音小、耗能低、无污染、成本低、结构简单而成为新能源汽车发展的主流,世界很多国家都投入了大量的人力、财力去开发电动汽车。
本文主要围绕电动汽车的电动机以及目前普遍使用的电动车控制系统主要参数作出分析,例如转速与转矩的关系、转速与功率的关系、功率与转矩的关系以及传动比、蓄电池的比能量等,设计出合理的电动车动力系统和控制系统。
本文主要采用的技术有:1、电动机的转矩、转速、功率。
2、电动机的主要调速方式。
关键词:电动机、发动机、转矩、变频调速、交流电动机、EV目录第一章前言 (1)第二章电动汽车构造与原理 (2)第一节电动车的种类 (2)第二节蓄电池电动车 (4)第三节燃料电池电动车 (10)第三章电动车动力及控制设计 (12)第一节电动车驱动电机种类 (12)第二节直流驱动电动机 (14)第三节交流驱动电动机 (18)第四节直流电动机的控制 (21)第五节三项交流电动机的控制 (24)第四章我国电动汽车的缺陷 (27)第五章电动汽车的发展趋势 (29)致谢 (31)附录一 (32)附录二 (33)参考文献 (39)第一章前言汽车工业的告诉发展,汽车带来的环境污染、能源短缺、资源枯竭和安全等方面的问题越来越突出。
混合动力汽车整车控制系统讲解
摘要针对全球气候的逐步恶化、城市大气污染加剧以及石油资源过度消耗,许多国家都正在积极开发节能型、环保型汽车。
混合动力车辆已成为汽车技术研究的热点,而总线通讯技术和分布式控制网络也在汽车电子领域广泛应用。
混合动力汽车是传统燃油汽车和纯电动汽车两相结合的新车型,具有低污染和低油耗的特点,是当前解决节能问题、环保问题的切实可行的过渡方案。
为实现混合动力车辆能量管理和运动控制,基于DSP单片机和CAN总线技术实现混合动力汽车整车能量控制器的设计,包括电源管理模块、DSP外围配置电路、CAN接口电路、SCI串口通信电路、LCD显示电路、数据采集电路。
DSP接收由数据采集单元采集来的车辆实时运行信息,如:加速踏板位置、刹车踏板位置、车速等信息,进行计算,求出车辆运行需要的发动机转矩、ISG 驱动电机转矩,并通过CAN总线以电信号的形式将输出传输到各个控制单元以实现整车的实时控制。
相对传统内燃机汽车,本控制器取消了发动机怠速;提高了发动机平均负荷率;实现了制动能量回收。
优化了车辆的经济性。
在车辆需要频繁加减速和怠速起停的城市循环工况下,节能效果更加明显。
关键词:CAN总线,DPS,混合动力汽车,整车能量控制The Power Control System Of Hybrid Electric VehicleAbstractWith the deterioration of the global climate and the excessive consume of the oil resources,developing energy-efficient automobiles becomes an important direction in the automobile industry.Hybrid electric vehicle has become hot-spot in automotive engineering,and bus communication and distributed control network are widely used in automotive electronics.Hybrid electric vehicle employing two power souces-neternal combustion engine and electric motor,has been accepted world-widely as one of the most promising methods to solve these two problems.To realize energy management and kinetic control of HEV,according to DSP and CAN communication carry out the the vehicle power control module ,including the power management module,DSP module,CAN communication module, SCI communication module and LCD module.DSP receives the data that collected of the vehicle that the unit collects by the data to go an information, such as:Accelerate pedal position and braking pedal position,speed information, carry on a calculation, beg the motor that a vehicle circulates a demand to turn and ISG to drive electrical engineering to turn,and pass the CAN communication delivers the exportation to each control unit by the form of telecommunication with carry out the vehicle power control module.Opposite traditional internal combustion engine car, this controller canceled motor Dai soon;Raised a motor the burden rate is on the average;Carried out to make an amount of kinetic energy recall.It was excellent to turn the economy of the vehicle.Economize on energy effect Under circulating work condition in the city that needs to be multifarious to add and subtract soon to soon rise to stop in the vehicle,it's getting more obvious.Key words:CAN bus,DSP,Hybrid electric vehicle,the vehicle power control module目录第一章绪论-------------------------------------------------------------------------------------------------------- 11.1本课题的背景、目的和意义 ------------------------------------------------------------------------ 11.2混合动力汽车国内外发展现状 --------------------------------------------------------------------- 31.3混合动力汽车的分类---------------------------------------------------------------------------------- 61.4混合动力汽车的特点及比较 ------------------------------------------------------------------------ 91.4.1串联式混合动力汽车的特点---------------------------------------------------------------- 91.4.2并联式混合动力汽车的特点--------------------------------------------------------------- 101.4.3混联式混合动力汽车的特点--------------------------------------------------------------- 101.5论文的研究内容--------------------------------------------------------------------------------------- 11 第二章方案论证 ------------------------------------------------------------------------------------------------ 122.1 ISG型HEV的工作原理 ---------------------------------------------------------------------------- 122.2控制器CPU的选择 ---------------------------------------------------------------------------------- 122.3 CAN总线的在混合动力汽车上的运用---------------------------------------------------------- 132.4动力总成控制系统的结构分析和选择----------------------------------------------------------- 152.5系统硬件总体框图------------------------------------------------------------------------------------ 152.6稳压芯片的选择--------------------------------------------------------------------------------------- 162.7 RS-232收发器接口芯片----------------------------------------------------------------------------- 172.8 CAN收发器 -------------------------------------------------------------------------------------------- 172.9 ISG型混合动力汽车动力传动系统布置方案和整车控制策略 ---------------------------- 17 第三章HEV动力总成硬件系统设计 ---------------------------------------------------------------------- 203.1系统的硬件需求分析--------------------------------------------------------------------------------- 203.2功能模块划分 ------------------------------------------------------------------------------------------ 203.3 TMS320F2812的介绍-------------------------------------------------------------------------------- 203.4 DSP最小系统及相关电路 -------------------------------------------------------------------------- 223.4.1供电电路---------------------------------------------------------------------------------------- 223.4.2复位电路---------------------------------------------------------------------------------------- 233.4.3时钟振荡电路 --------------------------------------------------------------------------------- 233.4.4 JTAG接口电路-------------------------------------------------------------------------------- 233.4.5 SCI串口通讯电路---------------------------------------------------------------------------- 243.4.6 AD转换电路----------------------------------------------------------------------------------- 243.4.6 CAN通讯接口电路 -------------------------------------------------------------------------- 253.5 LED灯与按键电路 ----------------------------------------------------------------------------------- 263.6 LCD液晶驱动电路 ----------------------------------------------------------------------------------- 273.7油门/制动踏板位置信号采集电路 ---------------------------------------------------------------- 273.8车速采集电路 ------------------------------------------------------------------------------------------ 283.9发动机转速采集电路--------------------------------------------------------------------------------- 29 第四章HEV动力总成软件系统设计 ---------------------------------------------------------------------- 304.1软件系统总体设计------------------------------------------------------------------------------------ 304.1.1能量控制算法 --------------------------------------------------------------------------------- 314.1.2主程序流程图 --------------------------------------------------------------------------------- 324.2 AD转换模块 ------------------------------------------------------------------------------------------- 344.3显示模块 ------------------------------------------------------------------------------------------------ 35第五章结论------------------------------------------------------------------------------------------------------- 365.1总结------------------------------------------------------------------------------------------------------- 365.2展望------------------------------------------------------------------------------------------------------- 36 参考文献 ----------------------------------------------------------------------------------------------------------- 38 致谢 -------------------------------------------------------------------------------------------------------------- 40 附录1:程序清单------------------------------------------------------------------------------------------------ 41 附录2:硬件连接图 -------------------------------------------------------------------------------------------- 51第一章绪论1.1本课题的背景、目的和意义内燃机汽车经过120多年的发展和壮大,为人类文明做出了巨大贡献,创造了难以计算的直接或间接经济利益【1】。
混合动力汽车驱动系统方案设计及控制策略研究
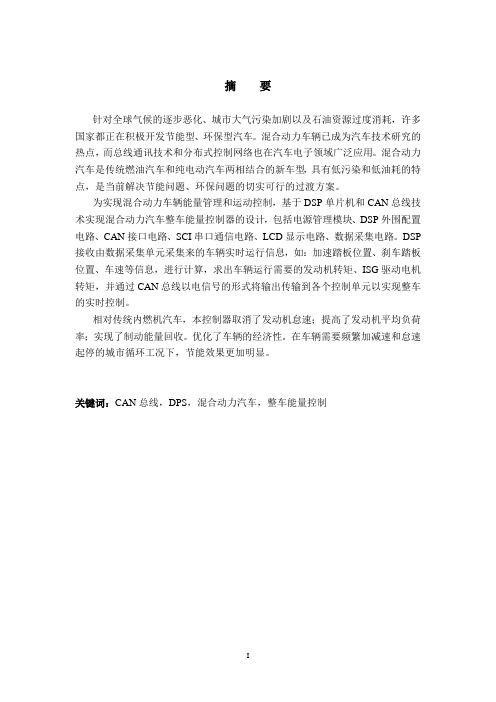
2驱动系统总体设计方案混合动力汽车驱动系统的部件特性、参数以及控制策略对于车的性能具有十分重要的作用。
但是充电设备的限制以及蓄电池组容量还是不能够忽视的,如果使用容量小的蓄电池,在行驶时电池荷电状态在一定范围内变动,而不用借助外部电网。
所以本方案属于电量维持型混动汽车[2]。
混合动力汽车驱动系统主要包括发电机、电池组、电动第二种布置形式,如图3,动力输出的扭矩主要在变速器的输出轴前端进行耦合,变速器的作用是传递发动机的输出功率,其额定功率比第一种形式小。
这两种布置形式,扭矩耦合装置主要是通过齿轮传动来实现。
齿轮传动效率高,结构紧凑,带传动布置灵活,具有防过载的特点,在实际中采用较多。
第三种布置形式,如图4,发动机和电机通过各自的传动系驱动车轮。
但是存在控制复杂的缺点,本文并联式———————————————————————基金项目:广东省普通高校青年创新人才类项目(2019GKQNCX93)。
图2变速器输入轴耦合形式油箱电池发动机离合器扭矩耦合装置电动机变速器差速器图1混合动力汽车动力总成结构图HV 蓄电池动力控制单元电动机发电机动力分离装置发动机减速机图3变速器输出轴耦合形式油箱电池发动机离合器扭矩耦合装置电动机变速器差速器混合动力汽车驱动系统采用第二种布置形式,扭矩通过带传动装置在变速器输出轴处进行扭矩耦合。
3混合动力汽车驱动系统部件参数确定对于混合动力汽车驱动系统的主要部件参数,要在动力性能满足的前提下,根据动力系统的控制策略,整车参数来确定[3]。
本文所选车型基础参数如表1所示。
式中,P c 为发动机单独驱动产生的功率;率,取为0.9;m 为整车质量;g 为重力加速度;力系数;v c 为巡航速度;C D 为空气阻力系数;3.2电动机参数确定如图5所示。
驱动电机典型的输出特性主要包括两个工作区:①速以下恒转矩区,主要作用是对混合动力汽车的载重能力速空间。
驱动电机功率可由下式计算[3]:式中,P d 为电动机功率;η2为电机传动效率;低速行驶时的速度。
混合电动汽车CAN网络系统设计及应用
混合电动汽车CAN网络系统设计及应用钱三平;黄少堂【摘要】通过对混合电动汽车与传统汽车的对比分析,根据混合动力汽车的特性,完成了基于混合动力汽车平台的CAN网络设计,具体包括CAN网络的总线协议设计、网络管理设计、整车网络拓扑设计以及混合动力网的电磁干扰设计,并进行了实车网络的测试验证.测试表明,该CAN网络系统很好地满足了混合动力汽车控制单元众多、信息传输量大、干扰大的网络特性需求,同时对整车厂混合电动汽车的网络平台化设计提供有效的帮助.【期刊名称】《汽车工程学报》【年(卷),期】2014(004)002【总页数】7页(P109-115)【关键词】混合电动汽车;CAN;协议设计;网络拓扑;网络管理;电磁干扰【作者】钱三平;黄少堂【作者单位】广州汽车集团股份有限公司汽车工程研究院,广东,广州510000;广州汽车集团股份有限公司汽车工程研究院,广东,广州510000【正文语种】中文【中图分类】U469.72混合动力汽车是节能环保汽车技术研发的一个重点[1]。
由于混合动力汽车控制结构和功能比传统的汽车要复杂得多,参与工作的电器节点更多,信号传输量更大,工作环境也比传统汽车更恶劣,对混合动力整车开发的通信系统提出了更高的要求。
本文以传统汽车通信系统为基础,对混合电动汽车的通信系统进行了设计分析,有效地进行了传统汽车网络通信系统平台的扩展,解决了混合电动汽车网络通信节点多、通信量大、干扰大的问题,并将这一设计方案用于某品牌的混合电动汽车上,进行了测试验证,结果证明了此种混合电动汽车网络设计的有效性和合理性。
表1 汽车总线特点比较?1 混合电动汽车的总线协议1.1 混合电动汽车网络通信协议选择随着总线通信在汽车上的普及应用,汽车上出现了很多通信方式,如CAN总线、LIN总线、Bluetooth 总线、MOST总线、FlexRay总线、USB总线、Ethernet总线以及IEEE1394总线等,这些用于汽车的总线其特点各异,着重点也有所不同,其中CAN通信在当今汽车上应用最为广泛。
混合动力汽车动力系统设计与分析

混合动力汽车动力系统设计与分析混合动力汽车是在传统燃油汽车的基础上加入了电动机和电池系统的一种新型汽车。
它通过电力和燃油两种动力形式的相互配合,既能满足传统汽车的高功率需求,又能在低功率运行时提供更高的燃油经济性和环境友好性。
一、混合动力汽车的基本原理混合动力汽车的动力系统由燃油发动机、电动机、电池和控制器组成。
燃油发动机主要负责高功率运行,电动机则用于低功率运行和辅助发动机。
电池提供电动机所需的能量,同时在制动过程中通过回收能量将一部分动能转化为电能储存起来。
燃油发动机和电动机可以分别独立工作,也可以同时工作以提供更高的动力输出。
在低速行驶或启动时,电动机通过电池供电,并且燃油发动机处于关闭状态。
当速度提高或需要更大动力输出时,燃油发动机启动并提供额外的动力支持。
同时,电动机可以通过回收制动能量继续为电池充电,以便在下一次需要时提供动力。
二、混合动力汽车的动力系统设计混合动力汽车的动力系统设计主要包括燃油发动机的选择、电池和电动机的规格确定以及控制系统的设计。
1. 燃油发动机的选择选择适合的燃油发动机对于混合动力汽车的性能和燃油经济性至关重要。
发动机的功率输出和燃油消耗直接影响到整车的性能和燃油经济性。
一般来说,高效的燃油发动机对于提高车辆的续航里程和减少尾气排放有着重要作用。
2. 电池和电动机规格的确定电池和电动机是混合动力汽车的核心组成部分。
电池的容量和电动机的功率直接决定了车辆的纯电动续航里程和动力输出能力。
因此,在设计过程中,需要根据车辆的使用场景和性能要求来确定电池和电动机的规格。
3. 控制系统的设计混合动力汽车的控制系统设计是整个动力系统设计的关键。
控制系统需要实时监测车辆的工况和动力需求,并根据情况对发动机和电动机进行合理的控制。
在加速、制动和行驶模式转换等过程中,控制系统需要协调各个部件的工作,以实现最佳的能源效率和使用经济性。
三、混合动力汽车动力系统的分析混合动力汽车动力系统的分析主要包括对系统效率、燃油经济性和排放性能的评估。
纯电动客车整车控制系统设计及驱动控制策略的思考
0 前言
随着纯电动客车应用范围的不断扩大袁 其控制系 统维护工作成为操作者和设计者关注的重点袁 同时袁 纯电动客车驱动控制策略合理制定又能提升电动客车 安全性袁为乘客带来舒适的乘车体验遥 由此可见袁本文 探究这一论题对纯电动客车有序运行尧 持续发展有重 要意义袁具体探究如下遥
1 纯电动客车整车控制系统基本介绍
哪种模式间的互相切换袁 均需要借助电机调节作用袁 其中袁 电机既能用来驱动车辆袁 又能为发电机运行提 供动力袁最终及时满足车辆牵引需要[1]遥
2 控制系统设计
2.1 整车控制系统功能分析 整车控制系统对整车性能有直接影响袁 它能在满
足基本需求的基础上袁 通过发挥功能作用来保障纯电 动客车安全性袁 具体功能包括院 输入信号和输出信号 及时采集袁 常见信号形式主要有数字量和模拟量输入 信号尧数字量输出信号曰整车能量掌控袁电池装置负责 向电机以及电动附件提供电能袁 整车控制装置在能量 优化以及有序管理方面发挥重要作用曰 驱动能量回馈 控制和制定能量回馈控制袁 这一功能优势发挥的过程 中袁行驶模式主要根据踏板变化速度尧档位操作尧踏板 幅度大小尧电池状态尧整车状态等内容来合理设置袁与 此同时袁 根据接收到的控制指令引导客车安全行驶袁 这项功能优势有效发挥袁 能够从整体上提升整车运行 效果袁 提高其运行经济性和安全性曰 故障分析以及控 制策略功能优势主要体现在院 系统故障检测和分析袁 针对高等级故障和低等级故障分别保持低速行驶尧安 全行驶袁 并做好系统初始化设置工作袁 充分发挥继电 器控制尧预充电控制尧电池状态分析等工作遥 2.2 控制系统方案
系统实际运行时袁 需要做好驱动电机尧 电机控制 器 尧 DC / DC 尧 DC / AC 尧 动 力 电 池 尧 整 车 控 制 器 等 设 备 的 连 接工作袁 以便为动力输出和能量回收等起到铺垫作 用遥 在不同运行模式中袁 整车控制器运用不同的控制 策略袁控制各部件动力输出袁满足车辆行驶需要遥 无论
混合动力汽车能量管理系统的设计与应用
混合动力汽车能量管理系统的设计与应用随着人们对环保和节能的要求越来越高,混合动力汽车逐渐成为汽车市场中的热门选择。
混合动力汽车是指通过电池和内燃机两种动力源相互配合,实现更高效、更节能的汽车。
而在混合动力汽车中,能量管理系统起到了核心作用,它能够控制电池和发动机之间的转换,以达到最佳能源利用效果。
本文将探讨混合动力汽车能量管理系统的设计和应用,旨在为混合动力汽车爱好者提供一些有用的信息和建议。
一、混合动力汽车能量管理系统的工作原理能量管理系统是混合动力汽车的核心组成部分,它负责监测和控制整个汽车的能源流动,以确保最优化的能量利用。
其工作原理主要基于三个步骤:1. 监测能量管理系统会通过各种传感器来监测动力源的状况,如监测电池的电量、发动机的转速和负荷状况等。
并且能够根据这些数据来预测汽车的能量需求情况。
2. 决策能量管理系统会根据监测到的数据,结合汽车的旅行需求,决定何时使用电池和何时使用发动机。
比如在低速行驶时,电池可以提供动力;在高速行驶时,发动机一般会接管动力输出。
3. 控制最后,能量管理系统会控制动力源的转换,并协调不同动力源之间的配合,以实现最优的能量利用效果。
二、混合动力汽车能量管理系统的设计混合动力汽车的能量管理系统设计需要考虑多项因素,包括能源来源、燃料利用效率、动力系统结构、车辆重量等等。
以下是一些设计混合动力汽车能量管理系统的重要考虑因素:1. 能源混合动力汽车能源的选择直接影响到能量管理系统的设计。
对于现代混合动力汽车而言,电力可以由电动机、锂电池以及高压电路提供,而燃料可以由各种非化石燃料、生物燃料以及天然气等提供。
因此,混合动力汽车的设计需考虑到汽车旅行的路线、途径、燃料成本等多方面因素。
2. 燃料利用效率设计能量管理系统时应考虑能源利用的效率。
通过合理配置混合动力汽车的能源,保障其高效、低耗、低排放的目标,降低对能源的浪费与对环境造成的污染。
3. 动力系统结构混合动力汽车的动力系统结构与控制算法非常重要,控制算法需要根据车辆的工况和驾驶人的习惯,逐渐调整燃料和电池的使用比例,以达到最佳的能源利用效果。
混合动力客车结构和工作原理

混合动力客车结构和工作原理
混合动力客车是一种新型的公共交通工具,它采用了混合动力技术,结合了传统燃油动力和电力动力,具有节能环保、安全可靠等优点。
下面我们来了解一下混合动力客车的结构和工作原理。
混合动力客车的结构主要由发动机、电机、电池、变速器、控制系统等组成。
其中,发动机和电机是混合动力客车的核心部件,发动机主要负责提供动力,电机则主要负责辅助发动机,提高燃油利用率和动力输出效率。
电池则是储存电能的设备,变速器则是控制动力输出的设备,控制系统则是整个混合动力客车的大脑,负责控制各个部件的工作状态。
混合动力客车的工作原理是将发动机和电机进行协同工作,实现动力输出的最优化。
当车辆启动时,电机首先提供动力,发动机则在需要时提供额外的动力。
当车辆行驶时,电机和发动机会根据车速和负载情况进行动力输出的协调,以达到最佳的燃油利用率和动力输出效率。
当车辆减速或停车时,电机则会将动能转化为电能,储存在电池中,以供下一次启动时使用。
混合动力客车的优点主要体现在节能环保、安全可靠等方面。
由于采用了混合动力技术,混合动力客车的燃油利用率比传统燃油客车更高,能够有效降低能源消耗和排放。
同时,混合动力客车还具有动力输出平稳、噪音低、维护成本低等优点,能够提高乘客的乘坐舒适度和安全性。
混合动力客车是一种具有很高发展潜力的公共交通工具,它的结构和工作原理都是为了实现节能环保、安全可靠等目标而设计的。
相信随着技术的不断进步和应用的不断推广,混合动力客车将会在未来的公共交通领域中发挥越来越重要的作用。
混合动力汽车能量系统的设计与控制优化
混合动力汽车能量系统的设计与控制优化混合动力汽车能量系统是为了提高汽车燃油经济性和减少尾气排放而进行的一种技术改进。
它结合了内燃机和电动机的优势,在实际驾驶过程中实现了能量的高效转换和利用。
本文将探讨混合动力汽车能量系统的设计原理及其控制优化方法,为改进汽车能源利用效率提供参考。
混合动力汽车的能量系统主要由内燃机、电动机、电池组和电子控制单元(ECU)等组件组成。
其设计原理可分为三种模式:串联模式、并联模式和功分配模式。
1. 串联模式:在串联模式下,内燃机驱动的发电机向电池组充电,电池再向电动机提供动力驱动车辆。
同时,内燃机也可直接提供动力。
该模式下内燃机的运行范围更广,电池主要用于储能,可以更好地利用内燃机的高效燃烧特性。
2. 并联模式:在并联模式下,内燃机和电动机可以同时或分别驱动车辆。
当需要高功率输出时,内燃机和电动机可以协同工作,以提供更大的动力。
而在行驶过程中,内燃机可以在发电机的辅助下为电池充电,以保证电池的储能量。
3. 功分配模式:功分配模式是根据驾驶需求和实时车速等因素,动态地控制内燃机和电动机的功率输出比例。
例如在低速行驶时,电动机可以独立驱动车辆,以提供更好的能效;而在高速行驶时,则主要依靠内燃机提供高功率输出以满足要求。
为了实现混合动力汽车能量系统的控制优化,需要考虑以下几个方面:1. 能量管理策略:能量管理策略是指通过合理地分配和利用能量,提高系统的能量利用效率。
通过实时监测车速、加速度、电池状态等参数,控制系统可以动态调整内燃机、电动机和电池的工作状态和功率输出,以提供最佳的动力性能和燃料经济性。
2. 制动能量回收:混合动力汽车在制动过程中能够通过制动能量回收系统将制动行为转化为电能,再存储在电池中。
通过合理利用制动能量回收系统,可以最大限度地减少能量的浪费,并提供额外的动力供应。
3. 车辆动力分配:在不同驾驶场景下,对于混合动力汽车能量系统的优化控制需要根据驾驶需求和实际道路状况,合理分配内燃机和电动机的功率输出比例。
混合动力轻型客车动力系统设计与分析

混合动力轻型客车动力系统设计与分析混合动力轻型客车动力系统设计与分析摘要:随着汽车行业的快速发展,低碳环保已经成为汽车发展的大趋势。
混合动力车型以其高效、经济、低排放等特点成为新时代的主流车型。
本文以一款混合动力轻型客车为载体,针对其动力系统进行了设计与分析,旨在探讨混合动力汽车动力系统的可行性及应用前景。
关键词:混合动力,轻型客车,动力系统,设计,分析1. 混合动力技术的产生和发展混合动力技术是汽车动力技术的一大创新,它是纯电动汽车和传统汽油车的结合体,具有高效、环保等优点。
混合动力技术从20世纪80年代开始出现,经过多年的发展,已经成为汽车行业的热门技术。
2. 轻型客车混合动力动力系统设计对于轻型客车而言,混合动力技术的应用相对较为容易。
本文以混合动力轻型客车为研究对象,设计了其动力系统,包括发动机、电动机、电池等关键部件。
具体方案如下:(1)发动机:选择一款燃油经济性好、动力输出稳定的发动机,采用可变气门技术、缸内直喷等技术,使其在燃烧效率和动力输出上具有优势。
(2)电动机:采用无刷电机,输出功率为30kW,峰值转矩为300N·m。
电机由电池供电,在启停、低速行驶等条件下发挥动力补充作用,能够提高燃油利用率并降低排放。
(3)电池:采用锂离子电池,能量密度高、充电速度快、寿命长等优点,能够保证车辆的续航能力。
电池安装在车辆下部,重心低、安全性高。
(4)控制系统:采用电脑控制系统,实现发动机和电动机的协同工作,能够通过充电和耗能的方式调整电池的状态,优化车辆能量流和效率,提高整车的综合性能。
3. 系统特点和优势以上系统方案具有如下特点和优势:(1)可实现燃油经济性和环保性的双重优化,能够降低车辆的油耗和排放。
(2)能够实现动力补充和能量回收,提高车辆的综合性能和经济性。
(3)电池寿命长、安全性高,能够有效保障车辆的续航能力。
4. 实验分析和数据验证本文对所设计的混合动力轻型客车进行了实验分析和数据验证。
电气工程及自动化控制技术在混合动力汽车领域中的应用

电气工程及自动化控制技术在混合动力汽车领域中的应用摘要:随中国交通业的发展,能源危机及环境污染问题持续加剧,为了减轻车辆运行对环境的危害,同时降低能耗,混合动力汽车应运而生。
近年来,在电子自动化技术的支持下,混合动力汽车制造技术及设计理念创新发展,整车性能得到进一步提升,在车辆生产制造方面取得了质的突破。
内燃机作为混合动力汽车的主要构件,对其进行电气自动化控制研究十分必要。
基于此,文章对电气工程及自动化控制技术在混合动力汽车领域中的应用进行了研究,以供参考。
关键词:自动化控制;汽车领域;应用研究1电气工程及自动化控制技术在混合动力汽车领域中的应用概述电气工业自动化相关技术被广泛应用推广到了电动汽车制造领域,一方面大大提升了自由汽车电气制造技术企业整车生产线的效率,另一方面自由汽车电气制造技术企业所开发生产的电动汽车产品质量也因此获得了很大提升,在汽车电气工业自动化相关技术的不断推动下,汽车电气制造技术行业已经走上了一个新的发展台阶。
具体而言,其应用原理主要体现在以下方面:一是对车辆实时行程规划模块进行开发及评估,具体方法包括在线优化、实时优化(动态规划或基于聚类优化)、借助模型在环和硬件在环进行基准测试;二是从路径角度对内燃机能量转化情况进行监控,可通过最优化能量管理开发、庞特里亚金最小值原理、基于路径的能量管理系统、模型在环测试(遵循标准循环测试工况及与MPC控制器的比较)、通过硬件在环控制原型(控制器原型即硬件在环测试结果)等方式实现;三是对混动汽车进行经济型巡航控制,其流程为建立对象控制模型—设计控制方案—得出结果并分析—评估硬件在环测试结果。
混合动力汽车内燃机电气自动化控制系统的设计及应用关乎整车性能,在评价电气自动化控制技术运用效果时可反推车辆性能,建立车辆制动相关参数模型评估内燃机运行状态,判断电气自动化控制技术是否发挥原有价值。
在实践中,应注重控制设计、控制验证,促进混合动力汽车的发展。
混动汽车动力控制系统
辅助充电计
• 牵引电机逆变器的运行状态可通过组合仪表 中的辅助充电计进行查看。
• HCPM 通过 CAN 通信将辅助充电信号发送至 组合仪表。组合仪表在接收到信号后激活 辅助充电显示屏并显示牵引电机的状态。
混合动力控制系统电路图1
混合动力控制系统电路图2
混合动力控制系统电路图3
二、制动系统合作控制
系统说明
系统说明 • 凭借再生制动,牵引电机在减速期间充当交流发电机,
来自车轮的减速能量转换为电能用于对锂离子充电。 再生制动控制 • 如果在驾驶期间踩下制动踏板,ABS 执行器和电气单元
( 控制单元 ) 通过 CAN 通信将制动力和合作再生可用扭 矩信号发送至 HPCM。 HPCM 根据这些信号计算再生制动
和锂离子蓄电池的状态。
当发动机冷却且锂离子电池电量低时,为了预热发动机或对锂子 电池充电,使离合器 1 啮合并使用牵引电子输出起动发动机。
注: • 即使发动机预热或锂离子电池充满电后,发动机在某些情况下由
于其他原因可能没法起动。 • 在极低温度下,可使用起动机电机起动发动机。
不同模式的控制:发动机启动
的范围内选择所需车速。 • HPCM 控制发动机和牵引电机输出并调节车速使其与设
定车速匹配。此外,HPCM 向组合仪表发送ASCD 状态信 号,信息显示屏显示工作状态。 • 如果 ASCD 控制期间检测到非标准状态, ASCD 控制将自 动取消。
CANCEL 的操作
CANCEL 的操作 • 当存在下面任一条件时,巡航操作都会被取消。 • 按下 CANCEL 开关 • 按下 ASCD 主开关 ( 设定车速被清除 ) • 同时按下两个以上的 ASCD 方向盘开关 ( 将清除
ቤተ መጻሕፍቲ ባይዱ机逆变器 ( 牵引电机 ) 和 DC/DC 转换器。 冷却风扇控制 HPCM 通过 CAN 通信根据 ECM 的请求信号和高压冷却液温
海格公交客车混联式气电混合动力系统

海格公交客车混联式气电混合动力系统海格公交客车混联式气电混合动力系统,是由海格客车集团自主研发的一种新型环保动力系统。
该系统基于混合动力技术,将传统的燃油动力与电力混合,使用压缩天然气作为燃料,通过电动机和发电机的相互作用,使得能量的转换更加高效,从而减少了车辆的污染排放和油耗。
该系统具有以下优点:1.环保节能混合动力系统的燃料是天然气,它能够使得排放的废气更为纯净,能够有效地减少环境污染。
此外,混合动力系统采用了电能辅助,当汽车在制动或者减速的时候,能量就可以被回收和存储,从而能够减少能源的浪费,提高燃油的使用效率。
2.动力强劲混合动力系统中的发动机和电动机可以实现更高效的能量转换,从而使得车辆的动力更为强劲。
同时,发动机和电动机的配合可以平衡二者的输出功率,使得行驶过程更加稳定。
这样能够提高车辆的性能,降低燃油的消耗率。
3.操作简单混合动力系统的控制电路相对于传统发动机的机械部分,更加先进,能够自动控制发动机的启停、气门和燃料喷射等工作,具有智能化的特点。
这样,驾驶员操作起来更加容易和方便,可以减少对车辆的损害和故障。
海格公交客车混联式气电混合动力系统,是海格客车集团自主研发的动力系统,集中了当前的高科技环保动力技术,在市场上的表现非常优异,已被众多公交公司所采用。
海格公交客车混联式气电混合动力系统的智能化控制系统海格公交客车混联式气电混合动力系统的控制系统是一套先进的智能化系统,为车辆的运行提供了可靠的保障。
该系统使用先进的电子设备和软件控制器,可以自动判断车辆的状态和控制发动机的启停,从而使得车辆在运行时更加平稳、高效,同时还可以实现预测性维护和故障预警等功能。
海格公交客车混联式气电混合动力系统的动力转换机制海格公交客车混联式气电混合动力系统是一种先进的动力技术,其动力转换机制不仅能够提高车辆的动力性能,而且能够降低车辆的油耗,同时还能减少污染的排放。
该系统通过发动机和电动机的相互协作,实现了能量的高效转换。
混合动力AMT系统自学习功能开发及应用

混合动力AMT系统自学习功能开发及应用混合动力汽车是近年来发展火爆的汽车类型之一。
为了更好地发挥混合动力汽车的优势,自学习功能已成为混合动力汽车AMT系统的重要发展方向之一。
本文将详细介绍混合动力AMT系统自学习功能开发及其在实际应用中的作用。
一、混合动力AMT系统自学习功能的优势自学习功能的开发对于混合动力AMT系统来说,具有以下的优势和意义。
1. 提高系统响应速度和灵敏度自学习功能能够动态地调整换挡控制参数,通过对行驶速度、油门开度、车辆荷载等指标的实时监测,实现系统对于不同驾驶条件下的换挡操作自适应。
在实际行驶中,自学习功能通过对驾驶员操作的了解和学习,及时调整换挡控制参数,从而提高系统响应速度和灵敏度。
2. 提高行驶舒适度和可靠性混合动力汽车的发动机和电动机两种动力源在换挡时需要相互配合,才能实现顺畅的换挡操作。
自学习功能能够通过理解发动机和电动机之间的配合方式,适时调整发动机和电动机的输出来实现更加顺畅和舒适的换挡操作。
同时,自学习功能还能通过对系统的自我诊断,提高系统的可靠性和稳定性,减少了维修次数和成本。
3. 实现能量的最优调配混合动力汽车采用双动力源的设计,能量的分配需要实现最优化规划。
自学习功能通过对电机功率输出、电池电量管理、发动机运转情况等数据的实时监测,能够为混合动力汽车提供最佳的能量调配方案,从而提高其能源利用效率,减少能量的浪费。
二、混合动力AMT系统自学习功能的开发和实现原理混合动力AMT系统自学习功能的开发和实现原理主要包括以下步骤。
1. 数据采集对于混合动力AMT系统来说,数据的采集是开发自学习功能的第一步。
数据采集需要对车辆不同的工况下的运行数据进行监测和收集,并对数据进行整理和分析。
2. 数据处理数据处理是自学习功能实现的关键步骤,主要包括数据处理算法的研发和模型的建立。
在数据处理中,需要根据不同行驶条件下的数据进行分析和处理,建立相应的模型,并通过时间序列分析和灰度预测等方法来预测未来的控制策略。
混合动力汽车传动系统的优化设计与控制

混合动力汽车传动系统的优化设计与控制在当今全球范围内,环保与可持续发展已经成为了汽车行业的关键议题。
为了减少对环境的影响同时提高车辆效能,混合动力汽车正逐渐成为了一种理想的选择。
混合动力汽车结合了内燃机和电动机的优点,通过优化设计与控制,可以实现最佳的能源利用和排放性能。
混合动力汽车的传动系统是整个车辆的核心部分,包括了发动机、电动机、电池、传动装置等多个组成部分。
优化传动系统设计是实现高性能和高效能的关键。
首先,通过合理选择内燃机和电动机的配置方式,可以实现最佳匹配。
例如,采用串联式混合动力系统可以将内燃机和电动机的功率输出相互补充,提高整车的动力性能。
而并联式混合动力系统则能更好地平衡能源利用和环境保护之间的矛盾。
此外,传动装置的设计也是非常重要的。
通过采用恰当的齿轮比和传动比,可以实现最佳的能量转换。
合理的传动设计可以在不降低动力性能的同时提高能源利用效率,减少能量损失。
另外,采用无级变速器技术可以提供更加平稳的加速性能,同时减小噪音和振动。
优化传动系统的控制策略也是提高混合动力汽车性能的关键。
车辆控制单元(ECU)可以根据车辆的实时工况和驾驶需求,智能地调节发动机和电动机的工作模式。
例如,在低速行驶时,电动机可以独立工作,减少燃料消耗和排放。
在高速行驶时,内燃机和电动机可以同时工作,提供更强的动力输出。
通过合理的控制策略,可以实现最佳的能源调配和驾驶舒适度。
另外,混合动力汽车的电池技术也对传动系统的优化设计和控制起着重要作用。
高性能的电池可以提供足够的电能储备,同时具备快速充电和长寿命的特点。
不良的电池性能会影响整个传动系统的效能和可靠性。
因此,选择合适的电池类型和优化充电和放电控制策略也是非常重要的。
总之,混合动力汽车传动系统的优化设计与控制是提高汽车性能和可持续发展的关键。
通过合理选择内燃机和电动机的配置方式,优化传动装置设计和控制策略,选择高性能的电池技术,可以实现最佳的能源利用和排放性能。
混合动力汽车传动系统的建模与控制

混合动力汽车传动系统的建模与控制混合动力汽车(Hybrid Electric Vehicle,HEV)作为一种将传统内燃机与电动机相结合的新型汽车,具有很高的能源效率和环境友好性。
混合动力汽车传动系统的建模与控制是实现其优化性能的关键技术之一。
本文将从建模和控制两个方面,介绍混合动力汽车传动系统的相关技术。
一、混合动力汽车传动系统的建模混合动力汽车传动系统主要由内燃机、电动机和能量存储装置(电池组)组成。
其基本原理是通过内燃机和电动机的协同工作,实现能量的最优分配和利用。
1. 内燃机建模内燃机是混合动力汽车传动系统的核心部件之一。
其建模主要包括燃烧过程和机械动力传递两个方面。
燃烧过程建模主要是通过分析内燃机的燃料供给、进气、压缩、燃烧和排气等过程,建立数学模型描述其功率输出和燃料消耗。
常用的方法包括基于物理原理的热力学模型和基于神经网络的经验模型等。
机械动力传递建模主要是通过分析内燃机的转速、扭矩和输出功率等参数,建立数学模型描述其输出特性。
常用的方法包括基于物理原理的机械模型和基于曲线拟合的经验模型等。
2. 电动机建模电动机是混合动力汽车传动系统的另一个关键部件。
其建模主要包括电机特性和电机控制两个方面。
电机特性建模主要是通过分析电机的电流、电压、转速和扭矩等特性参数,建立数学模型描述其输出特性。
常用的方法包括基于物理原理的电磁模型和基于神经网络的经验模型等。
电机控制建模主要是通过分析电机的控制策略和调节器等组成部分,建立数学模型描述其控制方式和性能。
常用的方法包括基于PID控制器的经典控制模型和基于模糊控制器的智能控制模型等。
3. 能量存储装置建模能量存储装置即电池组是混合动力汽车传动系统的储能装置。
其建模主要包括电池特性和能量管理两个方面。
电池特性建模主要是通过分析电池的电荷状态和能量输出等特性参数,建立数学模型描述其输出特性。
常用的方法包括基于物理原理的电化学模型和基于统计学的经验模型等。
混合动力电动汽车驱动系统方案设计

混合动力电动汽车驱动系统方案设计摘要:面对新世纪能源和环保的巨大压力,混合动力电动汽车(HEV)成为当前主流清洁能源汽车。
混合动力汽车的动力性、燃油经济性和排放性能与驱动系统结构设计和参数的匹配以及车辆在行驶过程中的协调控制密切相关。
文章以某并联混合动力电动大客车为研究对象,进行了混合动力驱动系统配置、混合动力驱动系统部件选型和参数设计、多能源动力总成控制系统及其控制策略方面的研究。
关键词:混合动力电动汽车;驱动系统设计;控制策略;Drive System Design for Hybrid Electric VehicleAbstract: Facing the challenges of oil shortage and air pollution, Hybrid Electric Vehicle(HEV) becomes one of the main clean vehicles. In this dissertation, With a parallel hybrid electric transit bus as the main research subject, the hybrid power drive system(HPDS), the multi-energy power train control system,the power control strategy modeling are studied and analyzed. Performances of HEV, in terms of driving,, fuel consumption, and exhaust emission, strongly depend on the coordination of the drive train and their control strategy.Key words: Hybrid Electric Vehicle; Drive System Design; Controls strategy引言近几十年来,世界各国汽车工业都面临着能源危机与环境保护两大挑战。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
混合动力客车电控系统应用与设计
发表时间:2016-06-22T15:12:27.037Z 来源:《科技中国》2016年4期作者:张钊威
[导读] 受制于当前电池技术和工艺影响,混合动力汽车的技术开发和积累是更为务实的选择。
(东风柳州汽车有限公司广西柳州545005)
摘要:本文从整车零部件匹配角度出发,在CAN总线技术的基础上系统性的分析了混合动力客车电控系统主要特点,介绍了康明斯高压共轨柴油机以扭矩为输入控制喷油和车辆驱动电机响应扭矩控制的特点,引申到混合动力客车的整车控制器设计和控制方法。
提出设计一款基于Freescale S12X处理器平台的控制单元实现对发动机和电机的控制,并按照V型开发模式要求实现底层驱动和Simulink自动代码生成相结合的软件结构,开发上位机分析软件,实现并应用在混合动力客车上。
关键词: 扭矩分配 MAP图自动代码生成
汽车动力纯电动驱动是我国汽车业中长期发展目标,受制于当前电池技术和工艺影响,混合动力汽车的技术开发和积累是更为务实的选择。
发动机,电机,电池,变速箱作为混合动力客车上的主要部件之一,研究其控制部件即电控系统对于混合动力客车应用匹配有着重要意义。
1高压共轨柴油机电控技术简介
高压共轨柴油发动机采用电子控制单元(Electronic Control Unit简称 ECU)从传感器(油门位置、转速、大气状态、水温、共轨压力)获取信息,结合约束条件,查找预先设定好的MAP,调整喷油器的主喷,预喷和后喷(可选)时长,达到控制喷入气缸油量目的。
博世高压共轨柴油机电控系统以转速为输入,结合转速、油门来控制油量和喷油时间,康明斯高压共轨柴油系统以扭矩为输入,控制最后的油量和喷油时间,下面以某6缸机为例介绍康明斯电控系统。
1.1从转速和油门到油量喷射
康明斯电控发动机采用霍尔传感器测量发动机转速和位置。
曲轴和凸轮轴转速信号传感器将感应电压信号传给专用电路,该电路去除噪声,限制最大电压幅值并作超速保护后传送给ECU内部的CPU,CPU的TPU单元可计算得到转速。
油门内部为电位计形式电路,油门输出两路线性电压信号给ECU.通常采用1:2比例的双路信号。
若同一个油门开度获得两个模拟信号差异超过阀值,即为油门故障。
某种油门获得有效电压信号,经单片机内部10位AD转换为数字量,再查询油门MAP表线性插值即可得到油门百分比。
当前油门下需求的扭矩小于外特性即为目标扭矩,若大于外特性即取外特性扭矩。
对于发动机匹配不同车型,只需要修扭矩MAP即可。
平滑的油门对应扭矩曲线适用于公交车场合,若要提高加速性能则需增大曲线斜率。
ECU获得目标扭矩后再根据发动机转速和目标扭矩查询扭矩-油量二维MAP,即可得到相应目标扭矩下的油量值,根据转速和油量二维MAP查询喷油正时,同理获得预喷开启时间,预喷油量,共轨轨压调节等,再经过瞬态和稳态以及高原,启动,排放等修正,即得到最终喷油时刻及时长。
1.2支持J1939协议的油门和转速及扭矩控制
J1939 多路通信使整车能够通过 J1939 数据通信替代硬件开关和实物控制发动机。
关于总线油门和TSC1及负荷率原文请参见SAE-
J1939-EEC2-SPN 91,和Torque/Speed Control#1-TSC1,EEC2- SPN 92 persent load at current speed [1]。
下文介绍利用CAN总线控制
发动机油门,转速和扭矩。
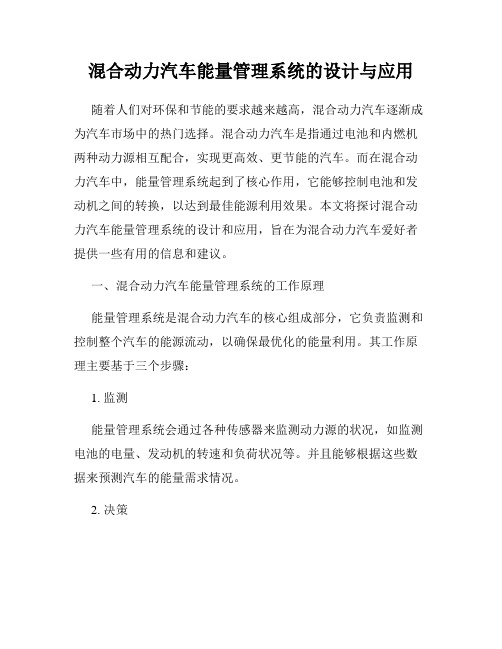
图1 转速控制模式发动机转速和负载
若选择扭矩控制模式,则Byte 1为02,Byte 3中的91H=145D,分辨率1,偏移量-125,即(145-125)%=20%,即当前转速下最大扭矩的20%。
总线报文发出的扭矩在28%左右(该值为发动机估算值),转速则从怠速750rpm呈一定斜率上升,负荷稳定时加速度趋近于0,负荷突变较转速模式下小。
状态切换初始时刻,负荷率突增,随后逐渐回归常态。
2电机驱动系统控制简述
电机驱动系统作为类似发动机功能单元的动力单元通常由电机和电机控制器组成。
而电机控制器由电机控制器核心板,IGBT驱动电路,控制电源,结构和散热系统,高压开关控制电路组成。
控制器核心板负责接收整车控制器的指令(如转速模式和扭矩模式)并反馈信息(如当前转矩,总线电流等),检测电机系统内传感器信息,根据指令和传感器信息产生逆变器开关信号;IGBT驱动电路接收CPU板开关信号并反馈信息(如各相电流),放大开关信号并驱动IGBT,提供电压隔离和保护功能;控制电源为CPU板和驱动电路提供多路相互隔离的电源;结构和散热系统则为电力电子模块散热,支撑组件安装并提供环境保护(如防水,防尘,撞击等);高压开关控制电路负责接受信号将直流电源能量传递给逆变器,减少突然接通电路的大电流冲击。
各种电机转矩-转速特性在加减速或速度调节情况下都服从运动学方程Te-TL=J* dn/dt(Te为电磁转矩,TL为负载转矩,J为转动惯量,n为电机转速),对于恒定负载或者突加减负载,只需要控制电机电磁转矩即可。
3 整车电控技术原理和设计
混合驱动的车辆其牵引力多于一个驱动源,驱动源从不同的储能器中获得必要的能量。
即是内燃机和电动机以及相应的储能器的组合。
根据驱动源的基本组合形式,分为并联混合驱动和串联混合驱动。
①对于并联式混合动力客车可类比传统柴油车的控制方式,由司机加速踏板开度和制动踏板开度,发动机及电机转速,并结合发动机水温等约束条件分配二者扭矩。
②对于串联或者增程式混合动力客车,为了尽可能使得发动机转速位于经济区域,需对发动机转速和发电机扭矩进行控制。
除了发动机和电机自带的ECU,需要另外设计整车控制器(Vehicle Control Unit 简称VCU)。
3.1 整车控制原理
串混或增程式系统主要驱动力来自驱动电机,根据电机转速【EM_n】和加速踏板[Acc_pedal]及制动踏板[Brake_pedal]查询扭矩需求得到驱动电机的需求扭矩,再结合APU(即发动机-发电机系统所能提供的电流限制)得到电机的目标扭矩,该目标扭矩由整车控制器经过CAN报文发送给电机控制器,而电机需求扭矩转化为能量需求并结合电池(或者超级电容)电压以及剩余电量SOC转化为APU电流需求,再经CAN总线实现对发动机转速和发电机扭矩(或者励磁PWM)需求。
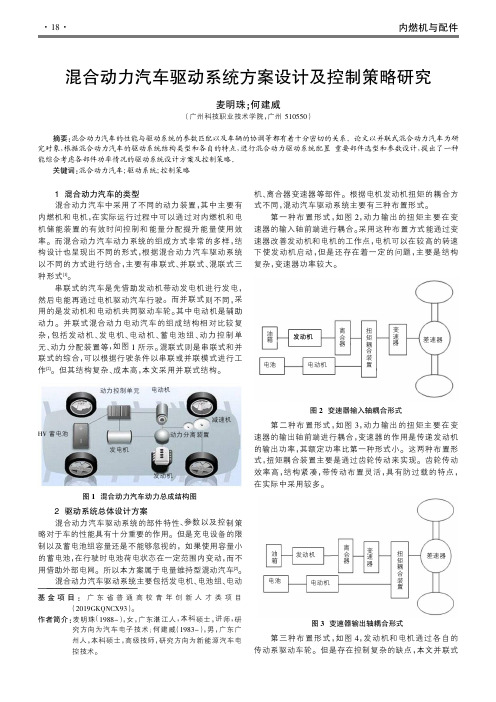
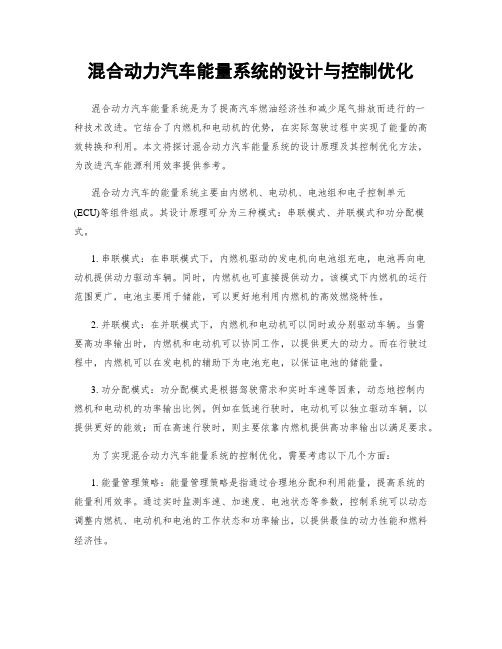
对于并联混合动力,如图2,发动机和电动机的扭矩分别传递给传动装置,发动机、电动机和传动装置的机械配合会使得扭矩在相应的情况下叠加。
VCU根据当前档位、车速、加速踏板开度、刹车踏板开度等传感器信息,估算总体扭矩,通过能量分配算法和电池充电状态条件给定分配发动机扭矩和电机扭矩目标初值,跟发动机实际输出扭矩和电机实际输出扭矩进行反馈比较,通过发动机控制和电机控制算法进行调节,最终达到动力平稳传递输出的目的。
文献[3]介绍了并联混合动力的动态控制保持动力传递平稳的方法。
图2并联混合动力的动态协调3.2 VCU硬件结构
采用freescale S12X系列处理器的VCU,负责采集挡位,加速踏板和制动踏板信息,并根据转速或者车速信息,发送扭矩命令给电机控制器和发动机ECU。
发动机ECU的RAM设计为1-2MB,单片机自身RAM通常难以达到,而S12X处理器RAM仅为64KB,可通过地址数据总线扩展,在标定变量不是特别大的情况设定某个RAM地址区域用于MAP和可调整参数标定,可标定数万个浮点型变量和若干一维和二维MAP。
通常使用
CAN Calibration Protocol(CCP)协议 [4]。
3.3 VCU软件结构
软件结构的开发可以在Matlab的Simulink环境下完成,在Matlab的Simulink环境下开发者只需要构建思路和算法分析,控制算法即可在该环境下完成并经过RTW转化为C代码,大幅增加了算法可读性和移植性。
4 结论
本文以扭矩为切入点分析发动机和电机控制的共性从而扩展应用到混合动力客车研发是本文的主要脉络。
建立在Freescale S12X处理器平台的整车控制器可实现simulink算法生成代码,并通过扭矩命令(或者转化为发动机油门)实现对发动机控制和电机控制并应用到混合动力客车整车电控系统开发。
【参考文献】1.《SAE J1939-71 Vehicle Application Layer》2.《电力电子技术手册》(美)Muhammad H.Rashid主编陈建业等译机械工业出版社2003.11 562-605 3. 《并联式混合动力系统转矩协调控制》童毅清华大学博士学位论文,2004 4.《基于CCP协议的混合动力整车控制器标定系统及其底层驱动的开发》胡佳等汽车科技,2010,(4)。