光栅尺数据采集系统及实现
《2024年度面向GPON的光纤光栅传感数据采集系统及帧结构研究》范文
《面向GPON的光纤光栅传感数据采集系统及帧结构研究》篇一一、引言随着科技的不断进步,光纤光栅传感技术已经广泛应用于各种领域,如土木工程、智能交通、环境监测等。
GPON(Gigabit-capable Passive Optical Network)作为一种高速、大容量的光接入技术,为光纤光栅传感数据的传输提供了强有力的支持。
因此,面向GPON的光纤光栅传感数据采集系统的研究,以及其帧结构的研究,对于提高数据传输效率、保障数据传输的可靠性具有重要意义。
二、光纤光栅传感技术概述光纤光栅传感技术是一种基于光纤光栅的传感技术,其核心是光纤光栅。
光纤光栅是一种利用光纤材料的光敏性制成的光学器件,可以实现对温度、压力、应变等物理量的测量。
其优点在于测量精度高、抗干扰能力强、可实现分布式测量等。
三、面向GPON的光纤光栅传感数据采集系统面向GPON的光纤光栅传感数据采集系统主要由传感器、数据采集模块、GPON传输模块等部分组成。
传感器将测量到的物理量转换为光信号,数据采集模块对光信号进行采样、量化、编码等处理,然后通过GPON传输模块将数据传输到上位机进行处理。
该系统的关键技术包括:1. 传感器技术:传感器是整个系统的核心部分,其性能直接影响到整个系统的测量精度和稳定性。
2. 数据采集技术:数据采集模块需要对传感器输出的光信号进行精确的采样、量化、编码等处理,以保证数据的准确性和可靠性。
3. GPON传输技术:GPON传输模块需要保证数据的高速、大容量传输,同时要保证数据的实时性和可靠性。
四、GPON帧结构研究GPON的帧结构是保证数据传输可靠性的关键因素之一。
GPON的帧结构主要包括帧头、帧数据和帧尾等部分。
其中,帧头包含了一些控制信息,用于指示帧的类型、长度等;帧数据则是实际要传输的数据;帧尾则用于帧的结束标识。
针对光纤光栅传感数据的传输,需要对GPON的帧结构进行优化设计。
具体来说,需要在帧头中加入一些与光纤光栅传感数据相关的控制信息,如数据的类型、采样率等;同时,要保证帧数据的长度适中,以适应GPON的高速、大容量传输特点;此外,还需要在帧尾加入一些用于错误检测和纠正的控制信息,以提高数据的传输可靠性。
基于PLC的光栅尺数据采集系统及方法[发明专利]
![基于PLC的光栅尺数据采集系统及方法[发明专利]](https://img.taocdn.com/s3/m/edb80971326c1eb91a37f111f18583d049640fae.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011347598.3(22)申请日 2020.11.26(71)申请人 西安航天计量测试研究所地址 710100 陕西省西安市15号信箱7分箱(72)发明人 赵米锋 丁国 邓鹏波 杨曦 朱锴 (74)专利代理机构 西安智邦专利商标代理有限公司 61211代理人 汪海艳(51)Int.Cl.G05B 19/05(2006.01)(54)发明名称基于PLC的光栅尺数据采集系统及方法(57)摘要本发明涉及一种光栅尺数据采集系统及方法,具体涉及一种基于PLC的光栅尺数据采集系统及方法。
解决现有通过计算机专用板卡实现数据采集存在的成本高以及采用专用数显表实现数据采集存在的频率过高数据易丢失及功能单一的技术问题。
包括PLC、触摸屏及开关电源;PLC自带高速计数器;光栅尺输出信号与高速计数器的采集端口连接;PLC用于将光栅尺输出信号处理后上传至触摸屏;上述触摸屏用于接收PLC输出信号并进行人机交互;PLC内存储数据处理程序,PLC对光栅尺输出信号进行处理,将光栅尺的脉冲信号转换为实际长度。
本发明采用PLC高速计数器计数功能读取光栅尺信号,通过编程实现数据处理,无需采用计算机就可完成,可直接将数据上传触摸屏实现人机交互。
权利要求书4页 说明书7页 附图2页CN 112415944 A 2021.02.26C N 112415944A1.一种基于PLC的光栅尺数据采集系统,其特征在于:包括PLC、触摸屏及开关电源;所述开关电源包括5V开关电源及24V开关电源,所述5V开关电源用于给光栅尺供电,所述24V开关电源用于给PLC和触摸屏供电;所述PLC包括高速计数器;光栅尺输出信号与高速计数器的采集端口连接;所述PLC用于将光栅尺输出信号处理后上传至触摸屏;所述触摸屏用于接收PLC输出信号并进行人机交互;所述PLC内存储数据处理程序,用于对光栅尺输出信号进行处理,将光栅尺的脉冲信号转换为实际长度;所述数据处理程序包括暖启动程序、主程序及校准子程序;所述数据处理程序被执行时,执行以下步骤:步骤1、运行暖启动程序,实现初始化;PLC上电,对高速计数器数据存储地址以及其它数据存储地址清零,初始化;步骤2、运行主程序,计算光栅尺实际长度;步骤2.1、PLC的数字量输入端口接收到光栅尺参考点的上升沿信号触发高速计数器开始计数,并将脉冲数存储到高速计数器数据存储地址中;步骤2.2、读取高速计数器数据存储地址中的脉冲数,若该地址中的脉冲数有不稳定或跳变现象,则在设定时间内连续存储n个脉冲数,取其平均值或者中位值作为该地址当前脉冲数;其中n为大于等于2的正整数;步骤2.3、根据采集到的脉冲数及光栅尺栅距计算光栅尺实际长度;步骤3、运行校准子程序,对光栅尺实际长度进行校准。
大直径多滚压轮测量光栅数据采集系统设计
大直径多滚压轮测量光栅数据采集系统设计徐正红,金施群(合肥工业大学仪器仪表学院,安徽合肥 230022) [收稿日期]2004-09-07 [基金项目]国防军工计量十五重点科研项目,编号为60104208 [作者简介]徐正红(1976-),男,安徽望江人,工程师,合肥工业大学在读研究生,从事计量测试工作。
[摘 要]文章简要介绍了大直径多滚压轮测量法的基本原理和虚拟仪器技术的特点,详细阐述了利用LabV IEW 调用动态链接库机制构建光栅数据采集系统的过程,实践表明这是LabV IEW 与其它Windows 应用程序之间实现数据共享的一条很好的途径。
[关键词]虚拟仪器;LabV IEW ;动态链接库;光栅;数据采集[中图分类号]TB 92 [文献标识码]B [文章编号]1002-1183(2005)02-0010-03Design of raster data acquisition system for large diametermeasurement with multiple rolling 2wheel methodXU Zheng 2hong ,J IN Shi 2qun(School of Instrumentation ,Hefei University of Technology ,Hefei 230022,China )Abstract :The Basic principle of large diameter measurement with multiple rolling 2wheel method and the conception of virtual instrument are briefly introduced.The raster data acquisition system is constructed by running DLL in LabV IEW.Practice proves that it is a quite effective means to realize data share between LabV IEW and other Windows application programs.K ey w ords :virtual instrument ;LabV IEW ;DLL (Dynamic Link Libraries );raster ;data acquisition1 大直径多滚压轮测量方法和虚拟仪器技术在几何量测量领域,大直径高准确度测量方法一直是一个技术难题,长期以来,国内外学者对大直径测量进行了大量的研究,但是始终没有理想的方法和仪器出现,使其成为提高重大装备制造精度的瓶颈。
基于BISS协议绝对式光栅尺数据采集系统设计
㊀2020年㊀第7期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2020㊀No.7㊀基金项目:国家重点研发计划项目(2017YFF0105902);国家自然科学基金项目(91648108,51875108);广东省自然科学基金项目(2015A030312008)收稿日期:2019-06-04基于BISS协议绝对式光栅尺数据采集系统设计邝俊澎1,杨志军1,孙㊀晗1,熊少旺1,吴建成1,李俊颖1,贾㊀静2(1.广东工业大学,广东省微纳加工技术与装备重点实验室,广东广州㊀510006;2.三英精控(天津)科技有限公司,天津㊀301700)㊀㊀摘要:为满足高速精密平台实现精准定位和数据处理的要求,基于BISS协议设计了软㊁硬件接口模块和上位机㊂运用FPGA和SN75179B组成的硬件电路,协同BISS协议解码模块和数据缓冲单元对光栅尺信号进行处理,最后通过串口模块与上位机进行通信㊂仿真与实测结果表明该数据采集系统能够准确快速地处理数据并且在上位机正确显示位移数据,具有良好的可移植性和拓展性等优点㊂关键词:BISS协议;FPGA;绝对式光栅尺;数据采集;并行CRC;上位机中图分类号:TP274㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2020)07-0052-05DesignofAbsoluteGratingDataAcquisitionSystemBasedonBISSProtocolKUANGJun⁃peng1,YANGZhi⁃jun1,SUNHan1,XIONGShao⁃wang1,WUJian⁃cheng1,LIJun⁃ying1,JIAJing2(1.GuangdongUniversityofTechnology,GuangdongProvincialKeyLaboratoryofMicro⁃nanoManufacturingTechnologyandEquipment,Guangzhou510006,China;2.SanyingMotioncontrolInstrumentsLtd,Tianjin301700,China)Abstract:Inordertomeettherequirementsofprecisepositioninganddataprocessingforhigh⁃speedprecisionplatforms,thispaperdesignssoftwareandhardwareinterfacemodulesandhostcomputersbasedonBISSprotocol.Thehardwarecircuitcom⁃posedofFPGAandSN75179BisusedtocooperatewiththeBISSprotocoldecodingmoduleandthedatabufferunittoprocessthegratingscalesignal,andfinallycommunicatewiththehostcomputerthroughtheserialportmodule.Thesimulationandmeas⁃uredresultsshowthatthedataacquisitionsystemcanprocessdataaccuratelyandquicklyanddisplaythedisplacementdatacor⁃rectlyinthehostcomputer,whichhastheadvantagesofgoodportabilityandexpandability.Keywords:BISSprotocol;FPGA;absolutegrating;dataacquisition;parallelCRC;hostcomputer0㊀引言随着时代的不断发展,在高端数控机床㊁精密电子封装设备和机器人等行业,对定位精度和定位速度的要求越来越高[1-3],因此对位置反馈器件的性能要求越来越高㊂位置编码器根据其工作方式可分为绝对式㊁增量式和混合式绝对编码器3种㊂由于绝对式编码器由机械位置确定编码而且无需找参考点,在抗干扰性和数据的可靠性方面得到很大提高㊂位置编码器作为伺服闭环控制中重要的反馈环节,与主机的通信速度和对数据处理的速度是限制执行机构快速定位的另一大因素[4-5]㊂本文采用绝对式直线光栅尺,其通讯协议为BISS协议㊂在低端应用场合中通常采用官方解码芯片或者单片机,但由于受到专用芯片的扩展能力和单片机的数据处理能力的限制,使得在高端场合和多场景应用显得力有不逮[6]㊂而FPGA具有灵活性高㊁可移植性强的特点和快速处理数据的能力,综合分析后最终采用FPGA实现BISS协议通讯㊂本文介绍了BISS协议的数据结构,设计了该系统的硬件电路原理图和所需的各个软件模块,实现了通讯接口和上位机的设计并将位置数据上传至上位机显示㊂1㊀BISS协议数据结构BISS是来自iC-Haus公司的开源协议[7-8],它适用于传感器和执行器的数字双向串行接口,而且带CRC校验功能保护数据传送㊂与其他同类通讯协议相比,BISS协议在兼容性和网络结构方面更具有优势,高速性和时延与SSI相当[9]㊂同时,BISS协议的数据长度可以根据实际情况做出修改,具有良好的扩展性㊂㊀㊀㊀㊀㊀第7期邝俊澎等:基于BISS协议绝对式光栅尺数据采集系统设计53㊀㊀BISS协议有传感器模式(sensormode)和寄存器模式(registermode)2种工作模式[10-11]㊂在传感器模式中,光栅尺充当从机,主机只需向从机发送位置请求即可快速获取相关信息㊂而寄存器模式中,主机和光栅尺可以进行双向读写操作来获取相应的信息㊂在传感器模式下,其数据帧格式如图1所示,首先是 Ack 响应阶段,紧接着是 Start 位和 0 位,之后的主体数据部分由若干位位置数据㊁1位错误位㊁1位警告位和6位CRC校验码组成,最后是超时结束阶段 Timeout ㊂图1㊀BISS协议数据格式具体的通信请求循环如下:(1)空闲时,主机使MA时钟线保持高电平而光栅尺使SLO线保持高电平表示已准备就绪㊂(2)请求位置采集时,主机开始传输MA时钟脉冲㊂(3)光栅尺在MA时钟的第二个上升沿时将SLO线设为低电平作为响应㊂(4)完成Ack周期后,光栅尺将二进制格式的绝对位置数据传输到与时钟同步的主机㊂(5)光栅尺传送完所有数据后,主机停下时钟并将MA线设置为高电平㊂(6)如果光栅尚未准备下一个位置请求周期,它会将SLO线设为低电平㊂(7)当光栅尺准备进行下一请求周期时,它通过将SLO线设为高电平来提示主机㊂2㊀系统软硬件设计2.1㊀硬件电路设计硬件系统由FPGA(CycloneⅣ系列EP4CE6E22C8)和绝对式光栅尺构成,该绝对式光栅尺的通讯格式为RS485/RS422差分线驱动信号,最高通讯速率为10Mbit/s㊂信号处理的硬件电路如图2所示,采用全双工差分芯片SN75179B对RS485信号进行处理㊂该芯片具有一个接收器和一个驱动器,数据传输速率达到10Mbit/s,满足BISS协议最高数据传输要求㊂光栅尺通过DB9接口与主控板连接,FPGA发出的MA时钟脉冲经过转换芯片由TTL电平转为差分信号输出给光栅尺㊂另一方面,光栅尺返回的SLO信号经芯片处理后由差分信号转为TTL电平输入至FPGA㊂FPGA与上位机采用串口通信方式,FPGA将获取的位置数据依次发送至上位机中,然后上位机将位置数据描点绘图,显示工作平台的运动轨迹数据㊂图2㊀电平转换电路2.2㊀软件模块设计该数据采集系统如图3所示,主要由锁相环㊁MA时钟控制器㊁SLO数据控制器㊁FIFO㊁UART控制器㊁光栅尺和上位机组成㊂其中锁相环的作用是为了得到不同的MA时钟频率,然后根据实际需求设置所需的MA时钟频率㊂光栅尺接收到MA时钟信号后返回当前位置信息给FPGA,然后经过一系列的数据处理,最后将结果传输至上位机显示㊂图3㊀系统框图在FPGA数据处理部分中,其具体工作原理如图4所示㊂FPGA通过key_en信号使能MA时钟信号控制器开始工作,向光栅尺发送MA时钟信号请求获取当前位置值㊂光栅尺接收到位置请求后,以同样MA时钟周期返回信息数据㊂图4㊀数据处理模块示意图根据BISS协议的数据特点,将SLO数据控制接收数据的过程划分为5个状态,该状态机工作方式如㊀㊀㊀㊀㊀54㊀InstrumentTechniqueandSensorJul.2020㊀图5所示㊂开始时SLO数据控制器处于空闲状态并且进入等待状态等待光栅尺返回数据㊂当SLO从高电平变成低电平时,状态机进入应答状态等待Start位㊂当接收到Start位后SLO数据控制器进入工作状态开始接收数据㊂一般接收数据的做法是根据MA时钟的上升沿读取当前SLO的电平状态,但是在实际电平转换过程中,电平并不稳定㊂因此仅仅根据MA时钟上升沿读取SLO引脚当前电平值会存在接收错误的情况㊂而数据在传输过程中,一般来说数据的中间位置的电平状态是最稳定的㊂因此在接收状态阶段中,如图6所示㊂其中sys_clk为系统时钟,bps_cnt为一个MA时钟周期对应系统时钟周期的数量,当计数值等于bps_cnt一半时读取数据即可获得稳定的电平值㊂接收完数据后,SLO控制器进入TIMEOUT状态㊂当SLO从低电平拉高后,SLO控制器重新进入空闲状态,如此循环工作㊂图5㊀数据接收状态机图6㊀电平信号采集原理SLO数据控制器接收完数据后向MA时钟控制器和CRC校验模块返回done_flag信号,并且将接收到的数据分为data_in和crc_check2部分数据传输至下一级模块中,其中data_in数据是接收到的位置值㊁错误位和警告位,而crc_check数据是接收到的CRC校验码㊂当MA时钟控制器接收到done_flag信号后停止MA时钟,并且将MA信号拉高;当CRC校验模块接收到done_flag信号后,开始对data_in数据进行CRC校验运算[12]㊂光栅尺的校验字段为1000011㊂为了进一步提升数据处理的效率,充分发挥FPGA并行数据处理的优势㊂CRC校验采用并行运算的算法[13-15],只需一个系统时钟周期即可计算出CRC校验码,主要代码如下:crc_out[0]<=d[26]^d[25]^d[24]^d[20]^d[18]^d[17]^d[16]^d[15]^d[12]^d[10]^d[6]^d[5]^d[0]^c[2]^c[3]^c[4];crc_out[1]<=d[27]^d[24]^d[21]^d[20]^d[19]^d[15]^d[13]^d[12]^d[11]^d[10]^d[7]^d[5]^d[1]^d[0]^c[2]^c[5];crc_out[2]<=d[25]^d[22]^d[21]^d[20]^d[16]^d[14]^d[13]^d[12]^d[11]^d[8]^d[6]^d[2]^d[1]^c[0]^c[3];crc_out[3]<=d[26]^d[23]^d[22]^d[21]^d[17]^d[15]^d[14]^d[13]^d[12]^d[9]^d[7]^d[3]^d[2]^c[0]^c[1]^c[4];crc_out[4]<=d[27]^d[24]^d[23]^d[22]^d[18]^d[16]^d[15]^d[14]^d[13]^d[10]^d[8]^d[4]^d[3]^c[0]^c[1]^c[2]^c[5];crc_out[5]<=d[25]^d[24]^d[23]^d[19]^d[17]^d[16]^d[15]^d[14]^d[11]^d[9]^d[5]^d[4]^c[1]^c[2]^c[3];其中crc_out[5ʒ0]是CRC校验模块对数据进行计算得出的校验码,d[27ʒ0]为校验模块接收的data_in数据,而c[5ʒ0]的值全为零,最后将计算得出的校验码与接收的crc_check校验码进行比对㊂如果二者一致,则crc_done信号输出高电平脉冲,表示正确接收数据,并将该数据传输至下一级处理单元;否则舍弃该数据,并准备发起下一次光栅位置请求㊂由于光栅尺获取位置数据的速度远快于串口与上位机之间的通讯速度,因此会造成因数据传输速率不一致而导致数据丢失的情况㊂针对这种情况,在数据传输过程中设计了数据缓存块㊂该数据采集系统的数据传输具有传输速率不一致㊁传输数据位宽不一致和数据传输的顺序不变的特点㊂综合比对各种缓存结构的特点,最后采用FIFO存储器作为数据缓存㊂FIFO一般用于不同时钟域之间的数据传输,也常用来实现不同位宽接口的数据匹配㊂数据在传送过程中需要满足寄存器对建立与保持时间的要求,数据存在亚稳态情况实现缓存功能,从而解决传输速率不一致的问题㊂3㊀上位机设计上位机开发利用的是基于图形界面开发的MAT⁃LABGUI工具箱,能够快速开发实验平台原型㊂该工具箱集成了大量的常用模块并且提供MATLAB函数库接口,支持RS232/RS485串口通讯协议[16-17]㊂同时,MATIAB具有强大的绘图功能和数据分析功能,非常适用于信号采集与信号分析㊂而且该工具箱能够使程序转换成exe文件,使其脱离MATLAB环境也能正常工作㊂㊀㊀㊀㊀㊀第7期邝俊澎等:基于BISS协议绝对式光栅尺数据采集系统设计55㊀㊀由于串口通信一次只能发送8位数据,而光栅尺位置数据共26位㊂为了提高计算机寻址效率,FPGA将位置数据拆分为4组8位数据发送至上位机㊂上位机将接收到的4组数据进行拼接,然后进行十进制换算,最后根据转换后的数据画出图表㊂4㊀仿真测试最后将整体设计好的各模块通过ModelSim软件进行仿真验证,在测试文件中模拟光栅尺以10Mbit/s的通讯速率向FPGA传输数据㊂本次测试中设置了2组数据,如表1所示,其中第二组数据完全正确㊂由数据表可知,2组的位置状态信息一致,但CRC校验值最后一位不同㊂由此可以测试SLO数据控制器接收2组数据的位置状态信息是否一致和CRC校验模块能否正确工作,其整体测试结果如图7所示㊂表1㊀仿真数据表位置状态信息CRC校验值1010_0101_1100_0011_1101_0100_10111101101010_0101_1100_0011_1101_0100_1011110111㊀㊀由图7可以看出,当触发信号key_en使能后,MA时钟以10MHz的频率向光栅尺发出位置请求㊂测试文件模拟光栅尺发送数据,当接收完数据后MA时钟停止工作并且保持高电平等待下次触发㊂从波形图数据分析得,SLO数据控制器正确接收2组的位置状态信息和CRC校验值㊂但因为第一组的CRC校验值与事实不符,所以crc_done无高电平脉冲返回㊂而第二组数据crc_done返回高电平脉冲证明CRC校验成功㊂由此得出设计的BISS接口通过高速通信仿真测试㊂图7㊀ModelSim仿真图5㊀实验结果与分析将编写好的程序下载到FPGA中,连接绝对式光栅尺㊂移动平台到不同的位置,然后发出位置请求信号,通过SignalTapLogicAnalyzer捕获FPGA内部接收的信号如图8所示㊂由图8可知,当FPGA发出位置请求后,MA时钟信号开始工作;当接收到完成标志位后,MA时钟停止工作并且保持高电平;之后将接收到的数据进行CRC校验,crc_done信号产生高电平脉冲信号,证明接收的数据正确㊂由此可见,该波形图符合BISS协议理论时序图,其数据处理模块能够正常稳定工作㊂图8㊀SignalTap数据捕获通过等间距地驱动平台并且向光栅尺发送位置请求信号,FPGA将接收到的光栅尺位置信息经过校验后上传至上位机显示,如图9所示㊂从图9可以看出,上位机能够正确接收光栅尺的位置数据并将其描绘成图表㊂图9㊀上位机数据显示示意图6㊀结束语本文根据BISS通讯协议设计了硬件电路和解码模块以实现绝对式光栅尺数据采集并且设计了上位机显示光栅尺数据㊂以FPGA为核心的数据采集系统,节省了外围电路的空间,而且移植性和扩展性好,具有一定的通用性㊂为了充分发挥FPGA强大的数据处理能力和灵活性,加入了并行CRC校验运算,缩短了工作周期㊂实验结果表明,该数据采集系统能够以10Mbit/s的通信速率准确接收光栅尺数据,并且解码后将其传输给上位机反映平台运动信息㊂㊀㊀㊀㊀㊀56㊀InstrumentTechniqueandSensorJul.2020㊀参考文献:[1]㊀黄特生,高健,周志强,等.面向电子制造的高速精密宏微运动平台研究[J].组合机床与自动化加工技术,2015(2):50-54.[2]㊀陆爱明.面向高端制造装备的高速精密定位平台控制技术研究[D].合肥:合肥工业大学,2013.[3]㊀夏链.电子封装BGA全自动植球机关键技术研究[D].合肥:合肥工业大学,2013.[4]㊀贾兴丹,万秋华,赵长海,等.光电编码器测速方法现状与展望[J].仪表技术与传感器,2018(3):102-107.[5]㊀刘小树,万秋华,王树洁,等.光电编码器检测装置研究现状与展望[J].半导体光电,2016,37(6):763-769.[6]㊀王希远,成荣,朱煜,等.基于FPGA的BISS-C协议编码器接口技术研究及解码实现[J].液晶与显示,2016,31(4):386-391.[7]㊀IC⁃Hause,Inc.BiSSinterface[EB/OL].[2019-05-20].www.ichauschina.com/en/biss.htm.[8]㊀高长清,林辉,张辉.BiSS接口的光电编码器数据读出研究[J].计算机测量与控制,2009,17(5):957-958.[9]㊀肖鲲,王莉娜.基于FPGA的BiSS协议光电编码器通信模块设计[J].电子测量技术,2008,31(7):188-191.[10]㊀张芳健,王晗,蔡念,等.基于FPGA的绝对式光栅尺接口通讯设计与实现[J].仪表技术与传感器,2018(1):36-40.[11]㊀常怡萍,杨蕾.基于Biss协议的绝对式编码器数据采集[J].电子测量技术,2017,40(4):92-95.[12]㊀张焱,任勇峰,齐蕾,等.基于FPGA的CRC校验算法的实现[J].电子器件,2015,38(1):222-226.[13]㊀肖艳艳,何晓雄.基于FPGA的CRC算法的串行和并行实现[J].合肥工业大学学报:自然科学板,2016,39(10):1362-1366.[14]㊀罗超,刘昌禄,胡敬营.一种基于FPGA的并行CRC及其UART实现[J].电子测量技术,2016,39(2):147-150.[15]㊀OutputLogic.CRCGenerator[Z/OL].[2019-05-20].http://outputlogic.com/?page_id=321.[16]㊀薛飞,杨友良,孟凡伟,等.基于MatlabGUI串口通信的实时温度监控系统设计[J].计算机应用,2014,34(1):292-296.[17]㊀张世弘,刘振兴.基于MATLAB-GUI的信号采集与分析系统设计[J].机床与液压,2015,43(21):113-117.作者简介:邝俊澎(1994 ),硕士研究生,主要研究方向为嵌入式开发等㊂E⁃mail:934137320@qq.com杨志军(1977 ),教授,主要研究领域高速精密运动㊂E⁃mail:yangzj@gdut.edu.cn(上接第32页)[30]㊀YOUGJ,JIANGJ,HERX,etal.PtPd(111)surfaceversusPtAu(111)surface:whichoneismoreactiveformethanoloxidation?[J].ACSCatal,2018,8:132-143.[31]㊀ZHENGYY,YUANJH,SHENJF,etal.Controllablesyn⁃thesisofPtPdnanocubesongrapheneasadvancedcatalystsforethanoloxidation[J].int.J.Hydrogenenergy,2018,43:4902-4911.[32]㊀WUJF,SHANSY,ZHONGCJ,etal.Understandingcom⁃position⁃dependentsynergyofPtPdalloynanoparticlesinelectrocatalyticoxygenreductionreaction[J].J.Phys.Chem.C,2017,121:14128-14136.[33]㊀ASMUSSENRM,ADAMSBD,CHENAC.SynthesisandelectrochemicalstudyofPtPdnanodendrites[J].J.Electro⁃anal.Chem,2013,688:151-157.[34]㊀LIM,GUOWY,SHANHH,etal.DecompositionofethanolonPd(111):adensityfunctionaltheorystudy[J].Langmuir,2010,26(3):1879-1888.[35]㊀SULAIMANJE,ZHUSQ,SHAOMH,etal.Pt-Niocta⁃hedraaselectrocatalystsfortheethanolelectro⁃oxidationreaction[J].ACSCatal,2017,7:5134-5141.[36]㊀GOMESJF,BERGAMASKIK,MIRANDAPB,etal.Re⁃actionintermediatesofethanolelectro⁃oxidationonplatinuminvestigatedbySFGspectroscopy[J].J.Catal,2013,302:67-82.[37]㊀MATSUNAGAH,NAKANISHIY,MITSUBAYASHIK,etal.Bioelectronicsniffersforethanolandacetaldehydeinbreathairafterdrinking[J].Biosens.Bioelectron,2005,20:1573-1579.作者简介:李思达(1989 ),硕士研究生,主要研究领域为纳米催化剂设计与制备和电化学气体传感器工艺研究㊂E⁃mail:lisida@ciac.ac.cn通讯作者:苏怡(1975 ),副研究员,主要研究领域为电化学传感器及其仪器㊂E⁃mail:suyi@ciac.ac.cn。
简述光栅尺工作原理及应用

简述光栅尺工作原理及应用光栅尺是一种精密测量仪器,常用于机床、测量仪器等精密加工和检测系统中。
其工作原理基于光学原理和电子技术原理,利用光栅条纹和光电检测器之间的相互作用来实现长度、角度等物理量的测量。
本文将对光栅尺的工作原理和应用进行详细介绍。
一、光栅尺的工作原理光栅尺的基本构成是光栅条纹和光电检测器,其中光栅是由一系列平行的条纹组成的线性光栅,条纹的宽度和间距非常小,精度可达到亚微米级别。
光电检测器则是光电二极管或双晶电子扫描器等电子元器件,能够将光信号转化为电信号。
光栅尺通过将光源、光栅和光电检测器组合在一起,实现对长度、角度等物理量的非接触式测量。
光栅尺的工作原理可以分为三个过程:1、光栅的发光和透射:光栅的条纹宽度和间距非常小,通常在几十或者几百微米范围内,人眼无法看到。
当光源照射到光栅上时,光栅的条纹会发生透射和反射,形成特定的光学线条。
2、光学信号的检测:光电检测器可以将光学信号转化为电学信号,其中包含光栅条纹的信息。
在实际应用中,光电检测器可以采用光电二极管、双晶电子扫描器等元件。
当光学信号入射到光电检测器上时,会产生电流,电流强度与光学信号的亮度成正比。
3、信号处理和计量:将光栅尺检测到的电信号转化为数值信号,可以通过A/D 转换器将模拟信号转换为数字信号进行记录和处理。
最终,数值信号经过处理得到物理量的数值输出。
除了基本的线性光栅,还有二维、三维光栅尺,其原理和线性光栅类似,不同点在于二维和三维光栅尺可以测量物体的超出线性运动轨迹的角度和形状等复杂运动规律。
二、光栅尺的应用光栅尺广泛应用于精密加工和检测系统中,如机床、精密仪器和制造业等多个领域。
光栅尺的应用主要有以下几个方面:1、长度测量:光栅尺可以测量物体的线性运动轨迹长度,其精度可达到亚微米级别。
光栅尺广泛应用于机床、加工中心、激光加工机等多个领域,能够测量工件、刀具和加工台等物体的长度和移动轨迹。
2、角度测量:光栅尺还可以测量物体的角度,其精度可达到亚角秒级别。
光栅测量数据采集系统在ARM中的应用
18 S AM M 0R
2M F I h as
O O0 0 x 2 00 0 0
O O0 0 x O 00 O O
‘觋
一
对软件开发环境 的选择 , 我们采用 A M公司 R 推 出的新 一 代 集 成 开发 工 具 AR D AR M A S( M D vlpr ut) eeoe i ,采用最新版本的 A S . I E S e D1 2的 D 环境。 根据表 1我们可以生成系统初始化文件 ii , nL s , 源程序如下。
一
S RR1【 T ,R J 0
L RR1=x 0 0 00;配 置 E T B H,2 D ,0 O 00 3 X D WT 3 位
数据宽度 S RR1【 # x 00 T ,H ,O 3 1] o
L 1= x2 0 0 0; 置 R MC O 2 l h DRR ,0 0 0 0 6 配 O ON ,MFa s
体 化 SA RM
OO F 00 x 3E0 0
O 01 0 x 00 0 4 0 O O0 0 x 4 00 0 0
态参数, 就可对火箭炮 的性能做 出综合评价 , 一方 犋苷 殛圈 面为火箭炮的设计 、 制造和试验提供可靠的依据 , 带 宽限制 另一方面也能通过对静态参数的测试, 达到对火箭 冒{ 炮动态参数( 如火箭炮的加速度 、 后坐力等 ) 的影响 伏/ 绍 进行分析的 目的, 这对于提高我国火箭炮的加T与 圈咽 检测技术水平 , 提高火箭炮 的质量与命 中精度意义 躁头 墨 非常重大。 魇捅 基于此 , 作为多管火箭炮静态参数测量系统 的 圆 个子集, 我们将光栅尺应用到定向管 内 径测量系 C 1急 辩 0 蹬 蜘 M捧0 饼 , 《 f j 糖赴 统中, 并将系统中比较繁琐且运算复杂的数据采集 ( ) 向 b反 及数据处理部分,与当下成熟的 AR T M7 DMI 技术 图 3 细分 判 向后 的 输 出波 形 芯片相结合 , 研制出高精度 、 高稳定性且便于在复 2 ls 杂环境下测量 的光栅测量定 向管内径测量系统如 mm,0细分后刚好满足 1的测量精度。Fah芯片 图 1 示。 所 采用 HY 9 V10 (MB ,D AM芯片采用 2片 2 L 6 2 )S R
光纤光栅传感系统数据采集与处理技术
2008年 第5期仪表技术与传感器Instrum ent T echn i que and Sensor 2008 N o 5基金项目:浙江省自然科学基金(X106872)收稿日期:2007-07-19 收修改稿日期:2007-12-11光纤光栅传感系统数据采集与处理技术王晓东,王真之,叶庆卫,周 宇(宁波大学信息科学与工程学院,浙江宁波 315211)摘要:在光纤光栅传感系统中,运用多通道智能光纤光栅解调器采集传感信号,并采用TCP /IP 协议采集光纤光栅解调器各通道的光谱数据,经过峰值检测和温度补偿后,根据传感器的标定数据换算出对应各监测点的物理量,较好地实现了光纤光栅传感系统的数据采集与处理。
并在光纤光栅反射波形的峰值检测技术中引进了指数平移钝化算法替代计算复杂度较高的高斯拟合算法,能有效地减少各种干扰因素引起的峰值波长抖动。
关键词:光纤光栅传感器;数据采集;数据处理;峰值检测中图分类号:TP212;T P274 文献标识码:A 文章编号:1002-1841(2008)05-0047-02Techni ques of Data A cquisition and Processi ng i n F i ber G rati ng Sensi ng Syste mW ANG X i ao dong ,W ANG Zhen zh,i YE Q ing w e,i ZHOU Y u(Facu lty of I n for m ation Sc i ence and E ngi n eer i ng ,N i ngbo Un i versity ,N ingbo 315211,Ch ina)Abstract :T echn i ques of data acquisiti on and process i ng i n fibe r g ra ti ng sensi ng sy stem were i m ple m ented by usi ng a m ulti channe l i nte lli gent opti ca l sensing i n terrogato r for sensory signa ls acqu isiti on ,w hich can ga t her spectra da ta o f each channel v i a T CP /IP pro toco ls .A fter detecting peak and compensati ng te m perature ,it can convert its cali brati on data into physical v al ue for each sensor .In peak detection techno l ogy o f fi ber grati ng reflecti on w avefor m,the pape r i n troduced i n t o the exponen ti a lw e i ghted m ov i ng average ar it h m e tic t o i nstead of G auss i an fitti ng a rith m etic that had h i ghe r co m putationa l co m plex ity ,it can reduce efficiently the jitter o f peak w ave l eng t h t hat caused by var i ous i nterfe rence factors .K ey word s :fi ber g ra ti ng senso rs ;data acqu i sition ;data processi ng ;peak detecti on 0 引言目前,应用光纤光栅传感器的最主要障碍是传感信号的解调[1],理论上研究的解调方法很多,但能够实际应用的解调产品并不多,而且价格较高;由于光源带宽有限、应用中一般要求光栅的反射谱不能重叠,因此可复用光栅的数目受到限制;同时,还需要解决在复合材料中同时测量多轴向的应变,在复杂环境中识别各种环境因素引起的波长变化并且进行合理的补偿等问题。
基于嵌入式的光栅尺精度检测系统设计
基于嵌入式的光栅尺精度检测系统设计光栅尺作为一种高精度的位置传感器,因具有测量精度高、可靠性强、响应速度快等优点,广泛应用于各种位移测量系统、数控机床、微电子封装设备当中,用于位置检测装置反馈位移量,实现系统的闭环控制。
因此,作为一种精密测量仪器,光栅尺产品在出厂前都需要对其进行精度检测以保证产品质量。
本课题针对某企业光栅尺大批量精度检测的需求,提出了基于USB2.0接口芯片CY7C68013A和Altera公司的CycloneⅣ系列的FPGA芯片的光栅尺数据采集器,并结合上位机软件构成光栅尺精度检测系统的主要部分,从而实现光栅尺精度检测功能的任务。
本文首先通过介绍光栅尺精度检测原理,分析现有的光栅尺精度检测系统方案和不足,结合光栅尺大批量检测需求的情况下,提出了光栅尺精度检测系统设计方案。
其次,介绍了增量式光栅尺和绝对式光栅尺的工作原理,分析精度检测系统中数据采集器应具备的性能和特点,参与并提出了采用嵌入式方案的光栅尺数据采集器,实现光栅尺位置信号采集。
再者,本文在仔细研究USB2.0通信协议、USB 驱动并结合相关资料的基础上,完成了数据采集器中USB接口芯片固件程序的设计,并对固件程序实现功能进行验证。
参与和完成系统数据采集器和上位机软件之间通信协议的设计,并实现上位机软件的通信模块部分,使系统的上位机软件通过USB接口,能够和数据采集器进行通信,控制数据采集器工作,完成各种检测任务。
最后,通过对系统上位机软件应具备的功能进行需求分析,然后使用数据库、多线程等技术并结合MFC进行上位机软件开发,实现了包括数据库管理模块、软件设置模块、图形绘制模块、产品查询模块等多个模块的功能,配合本系统的数据采集器,精度检测系统能满足企业生产的各种型号的光栅尺精度快速、实时检测的任务。
在本文的最后,通过搭建光栅尺精度检测平台,采集多组数据对基准光栅尺原始精度进行分析,得到基准尺补偿数据表;最后对上位机软件的基准尺精度补偿模块进行验证,确认系统能达到的检测精度,从而保证检测系统的可靠性。
基于PCI总线与CPLD的光栅尺细分采集系统的开题报告

基于PCI总线与CPLD的光栅尺细分采集系统的开题报告一、选题的背景和意义1、背景光栅尺是现代加工中通常使用的一种高精度测量仪器。
在现代数控机床、三维测量等领域中得到了广泛应用。
光栅尺是通过光电检测技术测量局部线位偏移,是一种具有微纳级测量精度的细分测量工具。
随着工业自动化技术的发展,对测量精度的要求越来越高,因此光栅尺的细分采集技术逐渐成为研究领域之一。
2、意义在实际应用中,需要对光栅尺的测量数据进行高精度的采集和处理。
因此,本文将基于PCI总线与CPLD技术,研究光栅尺测量数据采集系统的实现方法和关键技术问题,以提高光栅尺测量数据的采集效率、精度和实时性。
二、主要研究内容本文将研究基于PCI总线与CPLD的光栅尺细分采集系统,其中主要包括以下内容:1、光栅尺的原理及信号处理技术介绍光栅尺的工作原理,分析光栅尺信号的特点,并研究光栅尺信号的处理方法。
2、经典的数据采集系统的研究分析现有的数据采集系统,研究其优缺点,并结合光栅尺的测量特点,探讨符合实际需求的光栅尺细分采集系统的实现方法。
3、PCI总线和CPLD技术的研究介绍PCI总线和CPLD技术的相关知识,研究其在数据采集系统中的应用与实现方法。
4、基于PCI总线与CPLD的光栅尺细分采集系统设计与实现设计并实现基于PCI总线与CPLD的光栅尺细分采集系统,研究其关键技术问题,包括硬件电路设计、软件驱动程序编写、系统软硬件协同等方面等。
5、系统测试与性能评估对研制的光栅尺细分采集系统进行测试和性能评估,验证系统的实际效果和性能。
三、研究方法和技术路线通过文献调研,深入了解PCI总线和CPLD技术的背景和应用现状,掌握光栅尺的工作原理和信号处理技术。
在此基础上,结合实际需求,分析经典数据采集系统,研究其优缺点,设计出符合实际需求的光栅尺细分采集系统。
在系统实现过程中,需要进一步深入研究PCI总线和CPLD技术,设计硬件电路和软件驱动程序。
最终,对研制的系统进行测试和性能评估,并进行优化。
《2024年面向GPON的光纤光栅传感数据采集系统及帧结构研究》范文

《面向GPON的光纤光栅传感数据采集系统及帧结构研究》篇一一、引言随着科技的不断进步,光纤光栅传感器技术在诸多领域如地震监测、环境检测等获得了广泛的应用。
对于大规模的传感网络而言,数据的准确性和实时性显得尤为重要。
为了实现对这些传感器所获取的精确数据进行有效、高效地采集和传输,面向GPON(Gigabit Passive Optical Network,吉比特无源光网络)的光纤光栅传感数据采集系统应运而生。
本文旨在探讨这一系统的具体构造和实现,以及其核心部分的帧结构研究。
二、光纤光栅传感数据采集系统概述面向GPON的光纤光栅传感数据采集系统主要包括传感器节点、数据采集单元、GPON传输网络以及数据中心四个部分。
传感器节点负责环境数据的感知和初步处理;数据采集单元负责从传感器节点中获取数据并进行预处理;GPON传输网络负责将预处理后的数据传输到数据中心;数据中心则负责数据的存储、分析和应用。
三、系统关键技术及实现1. 传感器节点设计:传感器节点采用光纤光栅传感器,具有高灵敏度、高分辨率和高稳定性的特点。
同时,通过优化传感器节点的布局和配置,提高其环境适应性。
2. 数据采集单元:数据采集单元采用高性能的微处理器和数字信号处理技术,实现对传感器节点数据的快速、准确采集。
同时,采用低功耗设计,延长系统的使用寿命。
3. GPON传输网络:GPON作为一种高速、大容量的传输技术,能够满足大量数据的传输需求。
通过优化GPON的传输协议和帧结构,提高数据的传输效率和可靠性。
4. 数据中心:数据中心采用分布式存储和云计算技术,实现对大量数据的存储、分析和应用。
同时,通过数据挖掘和机器学习等技术,提取数据的价值信息,为决策提供支持。
四、帧结构研究GPON的帧结构是数据传输的核心部分,直接影响到数据的传输效率和可靠性。
针对光纤光栅传感数据的特点,我们设计了如下的帧结构:1. 帧头:包括帧起始标志、帧长度等信息,用于接收端识别和同步。
《面向GPON的光纤光栅传感数据采集系统及帧结构研究》范文

《面向GPON的光纤光栅传感数据采集系统及帧结构研究》篇一一、引言随着光纤传感技术的不断发展和普及,其在通信、测量和监测等领域的应用日益广泛。
光纤光栅传感器作为其中的一种重要技术,具有高灵敏度、高精度、抗干扰能力强等优点,被广泛应用于结构健康监测、环境监测、石油化工等领域。
然而,如何有效地采集和处理光纤光栅传感数据,成为了一个亟待解决的问题。
为此,本文提出了一种面向GPON(Gigabit Passive Optical Network,吉比特无源光网络)的光纤光栅传感数据采集系统及帧结构研究。
二、光纤光栅传感技术概述光纤光栅传感器是一种基于光纤光栅原理的传感器,其通过在光纤中写入光栅结构,实现对光信号的调制和传输。
光纤光栅传感器具有高灵敏度、高精度、抗干扰能力强等优点,能够实现对结构健康、环境等参数的实时监测。
然而,由于光纤光栅传感器的输出信号为微弱的光信号,需要进行有效的放大、滤波和采集等处理。
三、面向GPON的光纤光栅传感数据采集系统设计针对光纤光栅传感器的特点,本文设计了一种面向GPON的光纤光栅传感数据采集系统。
该系统主要由光纤光栅传感器、数据采集模块、传输模块和上位机处理模块组成。
其中,数据采集模块采用高精度、高灵敏度的光电探测器对光纤光栅传感器的输出信号进行采集和放大;传输模块采用GPON技术,将采集到的数据进行高速传输至上位机处理模块;上位机处理模块对接收到的数据进行处理、存储和显示。
四、GPON帧结构研究GPON作为一种高效的传输技术,其帧结构的设计对于数据传输的效率和可靠性具有重要意义。
在本文研究中,我们针对光纤光栅传感数据的特点,对GPON帧结构进行了优化设计。
首先,我们对GPON帧的结构进行了分析,确定了各部分的功能和作用;其次,针对光纤光栅传感数据的实时性和可靠性要求,对帧的时序、长度、编码方式等进行了优化设计;最后,通过仿真和实验验证了优化后的GPON帧结构能够有效地提高数据传输的效率和可靠性。
UGSJ-485光栅数据采集模块
UGSJ-485光栅数据采集模块UGSJ-485光栅数据采集模块是可编辑逻辑阵列技术与微处理器技术结合,使光栅长度计或光栅尺经模块最终处理成485信号。
数据模块对光栅信号进行信号细分、辨向、计数处理。
485通讯模块采用半双工收发方式,完全满足RS-485和RS-422串行协议的要求,具有增强型ESD保护。
一体化的光栅RS485模块可以对多点进行高精密接触式位移测量。
一、技术参数:1、外部供电电压:直流5V2、功耗:小于1W3、计数范围:+9999994、工作环境: 0°~85°5、ESD性能:±15kV人体放电模式;±15kV IEC1000-4-2 气隙放电;±8kV IEC1000-4-2 接触放电。
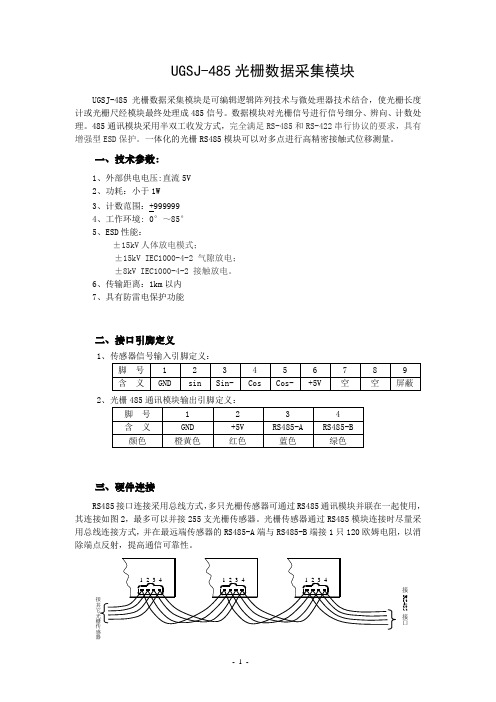
6、传输距离:1km以内7、具有防雷电保护功能二、接口引脚定义1、传感器信号输入引脚定义:2、光栅485通讯模块输出引脚定义:三、硬件连接RS485接口连接采用总线方式,多只光栅传感器可通过RS485通讯模块并联在一起使用,其连接如图2,最多可以并接255支光栅传感器。
光栅传感器通过RS485模块连接时尽量采用总线连接方式,并在最远端传感器的RS485-A端与RS485-B端接1只120欧姆电阻,以消除端点反射,提高通信可靠性。
接RS485接口器图2 多只光栅传感器通过RS485接口串接四、通信协议主控设备(带RS485收发器的控制器)与RS485通讯模块之间通信最小单位为一个数据帧,一帧数据由若干字节数据组成。
数据帧分为命令帧与应答帧。
命令帧由主控设备发出,应答帧由RS485通讯模块发出,主控设备向RS485通讯模块发送一帧命令帧,RS485通讯模块需返回一应答帧。
字节格式:1起始位,8数据位,1停止位,无奇偶校验,波特率9600bps。
帧格式:每帧数据以字符@开始,回车符(ASCII码0x0d)结束。
每一命令帧对应一应答帧。
见下表。
注:(1)、命令帧与应答帧均以ASCII码的十六进制形式表示。
《2024年面向GPON的光纤光栅传感数据采集系统及帧结构研究》范文
《面向GPON的光纤光栅传感数据采集系统及帧结构研究》篇一一、引言随着科技的飞速发展,光纤光栅传感技术已经成为现代工业、航空航天、医疗卫生等众多领域中不可或缺的测量手段。
为了更好地满足不同应用场景的需求,我们提出了一种面向GPON (Gigabit-capable Passive Optical Network)的光纤光栅传感数据采集系统,并对其帧结构进行了深入研究。
本文将详细介绍该系统的设计原理、实现方法以及性能优势。
二、系统设计原理本系统以GPON技术为基础,通过光纤光栅传感器采集各种物理量(如温度、压力、位移等)的信号,并将这些信号转化为数字数据进行传输和处理。
系统主要由以下几个部分组成:光纤光栅传感器、数据采集模块、数据传输模块以及数据处理与分析模块。
1. 光纤光栅传感器:用于测量物理量的变化,并将其转化为光信号。
2. 数据采集模块:负责接收光纤光栅传感器输出的光信号,并将其转化为数字信号。
3. 数据传输模块:将数字信号通过GPON网络传输至数据处理与分析模块。
4. 数据处理与分析模块:对接收到的数字数据进行处理和分析,提取出有用的信息。
三、数据采集模块的实现方法数据采集模块是本系统的核心部分,其性能直接影响到整个系统的测量精度和稳定性。
我们采用了以下方法实现数据采集模块:1. 优化光电器件的选择:选用低噪声、高灵敏度的光电器件,以降低系统的噪声干扰。
2. 信号处理电路的设计:设计合理的信号处理电路,对光纤光栅传感器输出的光信号进行滤波、放大和整形等处理,以提高信号的信噪比。
3. 高速数据采集技术:采用高速数据采集技术,实现对数字信号的快速、准确采集。
四、GPON帧结构研究GPON帧结构是本系统中数据传输的关键部分,我们对其进行了深入研究。
GPON帧结构主要包括以下几个部分:帧头、有效载荷和帧尾。
其中,帧头用于标识帧的开始和类型,有效载荷用于承载数据,帧尾用于标识帧的结束。
我们针对不同类型的数据传输需求,对GPON帧结构进行了优化设计,以提高数据的传输效率和可靠性。
绝对式光栅尺信号检测系统的设计与实现
绝对式光栅尺信号检测系统的设计与实现随着现代加工技术向着精密、超精密方法发展,人们对高精度的传感器提出了越来越迫切的需求。
绝对式光栅尺是2005年出现在市场的一种新型线位移传感器,相对于传统的增量式光栅尺而言,它具有测量精度高、抗干扰性强、断电后再工作无需回零点、无累计误差、位置计算在读数头内完成等优点,因此,被广泛使用在各种中高档数控机床和精密测量设备当中。
随着绝对式光栅尺的推广与使用,为了方便用户对设备上的光栅尺进行快速、便捷的信号检测;与此同时,为了方便光栅尺生产商在研发阶段对光栅尺产品的反复检测与调试,以及在售后阶段能方便得对产品进行有效的维护,这都需要一套完善的绝对式光栅尺信号检测平台来进行实现。
在国外,著名的光栅尺产商都会根据自身产品研发特定的检测平台,用于快速的推广和便捷的维护自身绝对式光栅尺产品;在国内,由于对绝对式光栅尺的研究起步比较晚,目前还没有类似系统。
本文在结合国内外现有的绝对式光栅尺检测技术和当前绝对式光栅尺产品需求的基础上,深入的研究绝对式光栅尺信号检测的原理、常见故障的类型和诊断方法、误差测量和补偿方式,从而设计出一款绝对式光栅尺信号检测系统,该系统由采集卡和上位机组成,用于实现绝对式光栅尺的在线信号检测与修调、故障诊断、误差的测量与补偿等功能。
首先研究了绝对式光栅尺信号检测的原理,确定信号检测的方法,包括了增量信号和绝对信号;同时研究了绝对式光栅尺常见的故障类型及其诊断方式。
设计了以STM32为核心控制器的信号采集卡,该采集卡配备有绝对式信号采集模块、增量信号采集模块、激光干涉仪接口模块、上位机接口模块等。
采集卡作为上位机和光栅尺之间的通讯桥梁,接受上位机的命令和参数,对光栅尺进行读写操作,并反馈到上位机中。
当用于对绝对式光栅尺进行误差测量时,该采集卡可为激光干涉仪提供触发信号。
设计了信号检测系统的上位机软件,该软件基于Qt环境,采用模块化方式开发。
包括有网络协议模块、产品信息与位置值采集模块、故障诊断模块、信号检测模块、光电参数修调模块以及误差测量与补偿模块,每个模块都采用独立封装的方式,用户可以根据实际的需求进行加载。
光栅信号采集的分析与实现
光栅信号采集的分析与实现
苑俊英;陈海山
【期刊名称】《机电工程技术》
【年(卷),期】2009(038)005
【摘要】光栅测量系统应用广泛,常用于高精度的数字信号检测系统中.本文首先分析了几种常用的光栅信号采集方案,然后针对高频千扰信号,提出了技术改进方案,最后介绍了光栅信号采集的PLD/FPGA实现.实验结果表明,使用PLD实现对光栅信号的采集.在很大程度上提高了系统的整体可靠性.
【总页数】5页(P36-39,91)
【作者】苑俊英;陈海山
【作者单位】中山大学南方学院计算机工程系,广东广州,510970;中山大学信息科学与技术学院,广东广州,510275
【正文语种】中文
【中图分类】TP274
【相关文献】
1.基于压缩感知的宽带信号采集系统性能分析与算法实现 [J], 焦松鹤;彭华
2.轴承振动信号采集分析系统设计与实现 [J], 李浩天;赵振刚;李英娜;许晓平;李川
3.一种舰船水下电场信号采集与分析软件设计与实现 [J], 王晓蓓;夏立;王向军;稽斗
4.基于LabVIEW的振动信号采集与分析系统的实现 [J], 杨群;邵强
5.电磁超声导波信号采集分析系统的设计与实现 [J], 孙晨光;王明明;孙晓云
因版权原因,仅展示原文概要,查看原文内容请购买。
光栅光谱仪中的高速数据采集系统
光栅光谱仪中的高速数据采集系统徐丹阳;童建平;隋成华;董少波【摘要】介绍了一种基于单片机的线阵CCD高速数据采集与实时处理系统.其由单片机系统、高速A/D转换模块、DMA控制电路和RAM存储器等构成.采用了DMA块传输方式,利用AD1674JN高速A/D转换实现了数据的高速采集.详细表述了系统的工作原理、硬件电路及其控制逻辑.这款电路用在相应的光谱仪中可以测量的光谱范围为300~600 nm,控制步进电机与减速系统配合,同时结合C-T型光学系统,理论上最小输出一个脉冲光谱移动0.01 nm就可采样一次.【期刊名称】《浙江工业大学学报》【年(卷),期】2014(042)006【总页数】4页(P690-693)【关键词】线阵CCD;直接存储器;单片机系统;高速数据采集【作者】徐丹阳;童建平;隋成华;董少波【作者单位】浙江工业大学理学院,浙江杭州310023;浙江工业大学理学院,浙江杭州310023;浙江工业大学理学院,浙江杭州310023;浙江工业大学理学院,浙江杭州310023【正文语种】中文【中图分类】TM131.5光谱仪是光谱分析中必不可缺的仪器,它的主要功能是分析物质的光谱组成,如波长、强度等.近年来,随着电荷耦合器件(Charge couple device,CCD)性能的不断提高,在光谱仪上的感光探测器件选用线阵CCD不断增多,线阵CCD能将入射光转换为信号电荷并按像元逐个输出,具有噪声低、光谱响应宽以及精度和灵敏度高等特点[1].难点在于对线阵CCD输出信号的高速采集与处理以及CCD本身需要驱动电路[2].由于需要对CCD信号的大量高速传输或数据采集,因此中断查询法不易实现,即使实现也是速度很慢.参考现有的CCD信号数据采集与处理系统,主要有两种,有基于DSP的CCD高速测量系统,使用DSP、复杂可编程逻辑器件(CPLD)和先进先出(First in first out,FIFO)存储器[3-5];还有就是基于单片机的直接存储器存取(Direct access memory,简称DMA)方式[6],考虑到价格因素,选用后一种方案.单片机本身不具备DMA方式的功能,同时现有的控制芯片也无法单独完成控制.用数字逻辑电路设计了CCD驱动电路[7]和DMA控制电路,A/D转换选用AD1674,CPU选用89C52,因为89C52的P0要复用,用74HC245P作隔离.1 系统构成系统结构如图1所示.图1 系统构成框图Fig.1 Diagram of system structure该系统由线阵CCD、CCD驱动电路、单片机控制系统、RAM存储器、DMA传输电路和A/D转换器构成.该单片机系统采用89C52芯片,HM6264LP-70芯片作为外部64k静态RAM使用, A/D(AD1674JN)转换器的工作范围是存储器的全部64k地址,其数据在DMA周期写入,在非DMA周期由单片机读出.RAM的地址与DMA地址发生器的输出相连,RAM的数据总线与数据切换电路相连,通过控制电路,在DMA写入周期,AD1674JN转换器的数据写入RAM,在非DMA周期,RAM的数据总线切换连接至89C52的DB总线(P0口),把写入RAM的数据读入单片机,RAM的地址由单片机控制DMA地址发生器产生,读入的数据有单片机通过USB的扩展口传递给上位机进行数据处理.驱动电路不断发出符合CCD 时序的脉冲,当需要采样时,单片机通知控制电路允许驱动电路发出的同步时钟对DMA地址发生器清零,清零信号同时通知控制电路让数据切换电路把AD1674JN 转换器的数据总线与RAM相连,从此控制电路接管控制AD1674JN转换器、DMA地址发生器、RAM存储器,在驱动电路的统一时钟下工作,AD1674JN转换器的数据写入RAM,单片机边处理数据边等待DMA地址发生器的溢出信号,DMA地址发生器由4个16位二进制计数器产生,DMA地址发生器的溢出信号引起单片机中断,同时通知控制电路让数据切换电路把RAM数据总线与单片机相连,单片机收回控制权,发信号给控制电路,输出时钟给控制电路,从RAM存储器中读取数据,这样就实现了CCD输出数据经A/D转换后以DMA方式的块数据采集.2 硬件组成与信号采集电路2.1 硬件组成2.1.1 A/D转换器AD1674JN芯片内部自带采样保持器(SHA)、10伏基准电压源、时钟源以及可和微处理器总线直接接口的暂存/三态输出缓冲器,采样频率为100 kHz,转换时间为10 μs.结合实际考虑以及为了简化电路设计,系统采用AD1674JN的单极输入连接电路(图2),其输入模拟电压的范围在0~10 V之间,完全满足CCD实际输出信号的要求.图2 单极输入时的连接电路Fig.2 Unipolar input connections with gain and offset trims2.1.2 单片机芯片AT89C52是一款低电压、高性能的COMS 8位单片机,它由美国ATMEL公司生产,其片内含可重复擦写的只读程序存储器(PEROM 8 kbytes)和随机存取数据存储器(RAM 256 bytes),同时内置通用8位中央处理器(CPU)和Flash存储单元,设计使用其最大时钟频率为24 MHz.8255A是一款可编程输入输出接口芯片,它由Intel公司生产,其具有PA口、PB口和PC口3个8位的并行I/O口,其中PC口又分高4位口(PC7—PC4)及低4位口(PC3—PC0),它们都能应用软件编程来改变I/O的工作方式[8].2.1.3 线阵CCD器件TCD1206SUP是一款高灵敏度、低暗电流的线阵CCD,它由2 236个光敏单元阵列构成,其中前64个和后12个用以暗电流检测,中间2 160个是曝光像敏单元.每个光敏单元的尺寸为长14 μm,高14 μm,中心距亦为14 μm,光敏单元阵列总长为30.24 mm[9].该芯片是在四路脉冲共同作用下工作的,其分别是驱动脉冲和,转移脉冲,复位脉冲.时序图如图3所示.由于该器件是两列并行分奇、偶传输的,所以在一个周期中至少要有1 118个脉冲.图3 CCD驱动脉冲波形Fig.3 CCD driving pulse wave2.1.4 静态RAM、总线切换路和DMA地址发生器静态RAM HM6264LP-70是一款高速、低功耗及带读写控制的64k的8位字节静态COMS存储器,典型存取时间为70 ns.静态RAM容量的选择有以下公式决定:(1)即(2)因此需要64k的8位字节静态COMS存储器.数据总线的切换电路采用1片DM74LS245三态八线收发器来实现,利用该芯片的19脚控制信号来实现数据采集时RAM与A/D之间的连通以及读取数据时RAM与AT89C52之间的连通.实际上此时A/D转换器也挂在数据总线上,不过此时处于高阻态.DMA地址发生器是由2片DM74LS393芯片产生,该发生器由4个16位二进制计数器通过级连的方式组成,64k的8位字节静态COMS存储器需要13根地址线,有3根地址线多余不用.最后通过MR信号实现DMA地址信号的清零,信号确保写操作的时序.2.2 信号采集电路信号采集电路如图4所示,该电路由1片A/D转换芯片、1片静态RAM和2片16位二进制计数图4 信号采集电路Fig.4 Circuit diagram of signal acquisition器芯片构成,其中CCD采集到的模拟信号输出端OS与A/D芯片输入端13脚10VIN的连接如图2所示,DMA地址发生器的清零信号MR和计数脉冲产生电路如图5所示.图5中C1、C2、C3和C4分别由单片机AT89C52的P2.5口、P1.7口、P2.7口和P3.2口控制.DM74LS393芯片的MR信号在高电平时清零,所以单片机把C1、C2和C3同时制成高电平,这样MR信号的时序与CCD转移脉冲同步,实现DMA地址的清零.计数脉冲的产生,当清零信号出现以后D触发器的CLR输入端一直处于低电平,在RAM未被写满时地址发生器2Q1输出信号a也一直处于低电平状态,这样触发器输出端Q和输出的信号分别为低电平和高电平,同时由于C2和C4被制成高电平,这时信号的时序完全由时序1号和5号共同来决定,时序图如图6所示.图5 MR和信号产生电路Fig.5 Circuit diagram of MR and signal图6 信号采集时序图Fig.6 Time sequence diagram of signal acquisitionA/D转换及静态RAM存储的时序分析,静态RAM存储器HM6264LP-70的真值表如表1所示,A/D转换器AD1674JN的真值表如表2所示,其中静态RAM的和信号分别由图5中的D触发器输出端Q和输入,CS1由信号输入(即图6中的1和5与信号);A/D转换器的信号由D触发器中的输出端Q输入和信号一致),A0和分别由图6中的2Y和9号输入.在DMA清零信号MR产生以后,静态RAM的和信号分别一直处于低电平和高电平,A/D转换器的信号同样也一直处于低电平,与此同时RAM的CS1信号(1和5与信号)处于高电平,而A/D转换器的信号(9号)处于高电平,这时正好实现A/D 12位数据转换,当转换完成后信号(1和5与信号)出现两个下降沿,使DMA产生2个地址,当第1个下降沿到来后RAM被选中,A0(2Y)和(9号)分别处于低电平和高电平,此时A/D芯片的高8位数据存储到RAM,第2个下降沿到来后,A0(2Y)和(9号)都处于高电平,此时低4位数据存储到RAM.这样周而复始,直到所有数据全部存储到RAM,这时地址发生器2Q1输出信号a为高电平,D触发器的Q和输出端信号反向,信号变成高电平,A/D芯片未被选中,DM74LS245芯片的控制信号由D触发器的输出端信号控制,此时为低电平,DM74LS245芯片被选中,通过此芯片数据从RAM中传输到上位机.从图6中可以看出A/D转换时间为4个主频周期,由于该芯片的转换时间为10 μs,因此决定了主频脉冲的频率为300 kHz,要想提高CCD的整体采集时间,只有选择A/D转换速度更快的芯片.表1 HM6264LP-70真值表Table 1 Truth table(HM6264LP-70)WECS1CS2OE 执行操作HLLLLLHHHLHL读写写表2 AD1674JN真值表Table 2 Truth table(AD1674JN)CECSR/C12/8A0执行操作HHHHLLLLLHHH×HHLL×LH12位转换12位输出高8位输出低4位输出结合实际应用,分别对工作电压为12 V的卤钨灯和工作电压为140 V的氘灯进行光谱检测,其检测光谱图如图7,8所示.图7 卤钨灯光谱图Fig.7 The spectra of halogen tungsten lamp图8 氘灯光谱图Fig.8 The spectra of deuterium lamp3 结论利用DMA实现单片机控制系统对线阵CCD信号的高速采集与实时处理.将此DMA电路运用于自行开发的光谱仪中,并结合C-T型光学系统,可实现对光谱测量范围为300~600 nm的线阵CCD信号高速实际采集处理.该设备的基本功能是分析物质的谱线波长、强度等,同时该光栅光谱仪由光栅,线阵CCD,放大电路,A/D转换电路,计算机等组成,可以说该设备集光机电于一体.正是由于CCD和光栅的有效结合,突破了原单色仪每次只能检测一个信号的局限,而CCD能够一次接收到分布在空间的多个信号,因此大大提高了光谱仪的工作效率.本文得到浙江工业大学自然科学研究基金(2012XZ002)的资助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光栅尺数据采集系统及实现
摘要:本文对光栅尺的数据采集进行了研究,对其输出的脉冲信号使用FPGA进行了采集,在FPGA内部采用细分,辨向,计数,缓存的处理手段实现了光栅尺的脉冲信号处理,使用Verilog HDL语言实现了处理逻辑,并通过了仿真验证。
处理后的数据缓存到FIFO中输出给了USB接口,以通过其传输给上位机。
关键词:光栅尺FPGA USB 数据处理
光电轴角编码器,又称光电角位置传感器。
它以高精度计量圆光栅为检测元件,通过光电转换,将输入的角位置信息转换成相应的数字代码,并可与计算机及显示装置相连接,不仅能够实现数字测量与数字控制,而且与其它同类用途的传感器相比,具有精度高,测量范围广体积小、重量轻,使用可靠,易于维护等优点,具有较高的性能价格比,因此已普遍应用在雷达、光电经纬仪、地面指挥仪、机器人、数控机床和高精度闭环调速系统等诸多领域,是自动化设备理想的角度传感器[1]。
本文使用RENISHAW公司生产的光栅尺解码器对光电轴角编码器进行读数,读数头通过26针的D型插座输出2组差分增量信号,然后使用FPGA对其输出的信号进行采集处理,然后通过USB接口把数据传送到上位机。
1原理及实现:
光栅尺读数头的输出脉冲是相位相差90度的两路脉冲方波,当轴沿着逆时针方向旋转时,A信号领先于B信号相位90度,当轴沿着顺时针方向旋转时,B信号领先于A信号相位90度。
A,B信号频率的高低变化反映了轴旋转速度的改变。
辨向逻辑的任务就是分清楚轴是顺时针还是逆时针旋转,通过分析A,B路的输出波形可以总结出,当检测到A信号的正跳变沿时,
检查B信号的状态。
若此时B信号为低,则可知旋转沿着逆时针方向旋转,若此时B信号为高,则是沿着逆时针方向旋转的。
细分逻辑的任务就是提高光栅精度,通过对A和B信号的全部上升沿和下降沿进行计数,不需要专用的细分模块,即可实现四细分;并通过在每个跳变沿判断A与B的电平高低来实现辨向。
根据上述的原理可以写出verilog HDL的部分代码如下
always @(rst or a)
if (!rst) q <= 524288;
else
begin
if (a==b) q=q-1;
else q=q+1;
end
always @(rst or b)
if (!rst) q <= 524288;
else
begin
if (a==b) q=q+1;
else q=q-1;
end
通过XILINX ISE的仿真图如下所示:
可以看出该模块完整的实现了对光栅尺的细分辨向及计数的功能。
2与上位机的接口
细分辨向后的数据通过一个锁存器存起来,并且以一定的频率输送到内部的FIFO中,内部FIFO与一片CY7C68013连接,CY7C68013是高集成、低功耗USB 2.0 微控制器
EZ-USB FX2? (CY7C68013) 的一个低功耗版本。
通过将USB2.0 收发器、串行接口引擎(SIE)、增强型8051 微控制器,以及可编程外设接口集成到一个芯片中,赛普拉斯研发出一个极具成本优势的解
决方案,不仅能在极短时间内完成从立项到投放市场的过程,而且其低功耗特点使得总线供电应用成为可能[2]。
FPGA与CY7C68013的连接图如下所示:
通过编写用于实现FPGA与CY68013的接口模块程序,USB固件程序,USB设备驱动程序以及客户端应用程序就可以实现FPGA 与外部上位机的通信,由于USB通信的模块已经很成熟,这里就不列出具体的代码。
3总结
本系统只是导航采集系统中的一个小部分,在实际的工程中所要采集的数据远远不止这两组,但是通过FPGA的并行性能和良好的可扩张性,可以轻松的实现12组数据的并行采集,并且在FPGA的控制逻辑下可以保证很高的实时性和可靠性。
参考文献
[1]董莉莉,熊经武.光电编码器的发展动态.光学精密工程,2000,(8):
24-27.
[2]Cypress Semiconductor Corporation.EZ-USB FX2 TechnicalReference Manual(Version2.1).www.cypress.com.2003.。