二级倒立摆模糊控制设计
倒立摆模糊控制系统设计

倒立摆模糊控制系统设计摘要:本文针对倒立摆的运动控制问题,设计了一种模糊控制系统,用于实现倒立摆的平衡控制。
首先,对于倒立摆的动力学建模进行了分析,并通过控制算法确定了控制系统的目标和控制策略。
然后,根据倒立摆在不同状态下的响应特点,设计了合适的模糊控制规则,并调节了控制参数,以实现系统的优化控制。
最后,在实验中验证了该控制系统的有效性和稳定性。
关键词:倒立摆;模糊控制;动态建模;控制规则设计目标:实现倒立摆的平衡控制,使其能稳定地保持在竖直状态。
设计过程:一、动态建模倒立摆是一种非线性系统,因此需要对其进行动态建模。
考虑倒立摆的运动方程:mL2θ¨+mgLsinθ=up其中,m为摆球的质量,L为摆杆的长度,g为重力加速度,θ为摆杆与竖直方向的夹角,up为施加在摆杆末端的控制力。
将θ和θ¨分别记做y和v,则系统的状态方程可以表示为:y'=v二、控制算法倒立摆的控制目标是使其保持在竖直状态,即y=0,v=0。
根据控制算法的思想,需要设计一个合适的控制策略,使得系统能够在有限时间内达到目标状态并保持在该状态。
采用PD控制器设计控制策略,其中Kp和Kd分别表示比例增益和微分增益。
up=Kp(y-0)+Kd(v-0)三、模糊控制规则根据倒立摆在不同状态下的响应特点,设计了合适的模糊控制规则。
具体而言,将y 和v的取值范围划分为若干个模糊集合,对应于不同的控制动作。
例如,当y远离目标点0时,需要施加较大的控制力;而当y接近目标点时,应逐渐减小控制力以避免过度响应。
通过实验和调节控制参数,确定了合适的模糊控制规则和参数设置,以实现倒立摆的优化控制。
结果与讨论:通过实验验证,该模糊控制系统能够实现倒立摆的平衡控制,并且具有一定的鲁棒性和稳定性。
在控制参数设置上,应根据倒立摆的特点和实际应用需求,进行适当调整,以实现最优控制效果。
基于变量融合的环形二级倒立摆模糊控制研究

倒立 摆 系统 是 日常生 活 中所 见 到 的任 何 重 心 在 上 , 支 点 在下 的控制 问题 的抽 象 。它是 一个 高 阶次 、 多变 量 、 非线性、 不稳 定 、 强耦 合 的 自然 不 稳 定 系统 , 杆 级 数 越 摆 多 , 难使 之稳 定 。作 为一个 装 置 , 的结构 又相 当简 单 越 它 而且 成本 低 廉 , 稳定 效 果一 目了然 。所 以 , 常适 合 用来 非
例 因子值可在仿真过程中得到。 3 仿真 与分 析
根 据表 1 中的数据 及最 优控 制原理 可取 系统 的加权
系数 Q
Q=d ( , , , , ,) 12 34 5 6
. 。丁丁 T丁 0 T T —1 —T o TT — 鲁 箬 0 王 。 _生 -£ _ f o0『 1 『 i 『 》 T_ T_ T , — — — 鲁
2 模糊 控 制器 设计 由系统 的状 态 变量 定 义 可 知 , 形 二 级倒 立 摆 含 有 环
N N , S , O, E, O, T P , L P P 。 M, L N , N Z P P , S P , M, B] 本文 采用全 交迭 三角 形 分 布隶 属 函数 , 设 各 变量 论 域 且
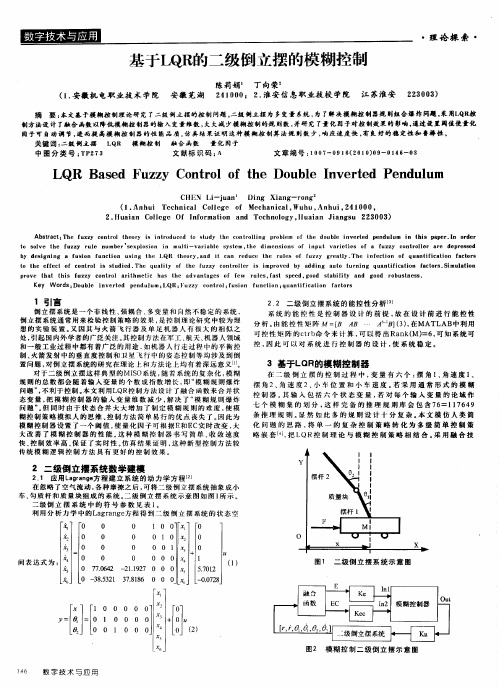
图 2 二 级 倒 立 摆 模 糊 控 制 原 理 图
2 1 融合 函数 . 融合 函数 的设 计 包括 以下 三项 内容 : () 用最 优控 制 理论 中 的 Rca 1利 i 6方程 :A+A — c P
P R一 B p+Q=0 B T 得 到 :r k =R一
由上述定义的模糊子集及论域结合专家经验可设计 M m ai a dn 型模糊 推理 规则共 4 条 , 表 2所示 , 文采 用 9 如 本
基于LQR的二级倒立摆的模糊控制
Ab ta t T e u z c n r l t o y s n r d c d o t d t e o t o l n p o l m o t e o b n i e t d e d l m i t i a e . n r e s r c : h f z y o t o he r i i t o u e t s u y h c n r li g r b e f h d u i nv r e p n u u n h s p p r I o d r
Ke W od Do be i v re p nd l m; J y rs: u l n e td e u u I QR; uz y o t o ; u in un to qu ntfc t0 f co s F z c n rl f so f ci n; a ii ai n a tr
二级倒立摆基于融合函数的模糊控制

10. 3969/j. issn. 1003-5060. 2011. 08. 009二级倒立摆基于融合函数的模糊控制邢景虎,陈其工,江明安徽工程大学电气传动与控制安徽省高校重点实验室,安徽芜湖241000摘要:文章针对多变量、非线性、强耦合性的二级倒立摆系统,采用模糊控制理论研究了二级倒立摆的稳定控制问题。
考虑到二级倒立摆为多变量系统,为了解决模糊控制器规则组合爆炸问题,利用LQR控制方法设计了融合函数以降低模糊控制器的输入变量维数,降低了控制器的设计难度,并研究了量化因子对控制效果的影响,通过设置阈值使量化因子可自动调节,进而提升了模糊控制器的性能品质。
仿真和实验结果表明,通过这种模糊控制算法设计的控制器不但结构简单,而且具有良好的控制效果。
二级倒立摆;模糊控制;融合函数;量化因子TP273A1003-5060(2011)08-1155-05Fusion function based fuzzy control for a double inverted pendulum XING Jing-hu CHEN Qi-gong JIANG Ming 2010-07-192010-12-25安徽工程大学青年科研基金资助项目(2008YQ047)邢景虎(1980-),男,安徽芜湖人,安徽工程大学讲师;陈其工(1961-),男,安徽滁州人,安徽工程大学教授,硕士生导师.万方数据万方数据万方数据万方数据@@[1]谷正气.汽车车身现代技术[M].北京:机械工业出版社, 2009:301-302.@@[2]于学兵,车艳秋.车门缝隙对车室内热环境影响的数值模拟 [J].机械设计与制造,2010(5):133-135.@@[3]熊可嘉,王伟,张万平.轿车热环境模拟及风口面积对乘 客舒适性的影响[J].制冷技术,2009,37(1):32-36.@@[4]向立平,王汉青.空调客车内气流分布的人体热舒适性研究 [J].中南大学学报:自然科学版,2009,40(5): 1194-1198.@@[5]王贤民,王晓梅.轻型客车空调风道改进设计[J].合肥工业 大学学报:自然科学版,2007,30(3):357-360.@@[6]谷正气,盂庆超,杨易,等.轿车室内流场的数值模拟研究 [J].系统仿真学报,2008,20(7):1700-1702.@@[7]王福军.计算流体动力学分析[M].北京:清华大学出版社, 2004:124.@@[8]傅德薰,马延文.计算流体力学[M].北京:高等教育出版 社,2004:196.@@[9]王保国,王新泉,刘淑艳,等.安全人机工程学[M].北京:机 械工业出版杜,2007:112-124.@@[1]李洪兴.世界首例倒立摆实物控制系统在我校试验成功 [J].北京师范大学学报:自然科学版,2002,10(2):22-24.@@[2]殷路,单劲松.n级倒立摆数学模型的建立[J].科技信息, 2008(32):202-203.@@[3] Ogata K.现代控制工程[M].卢伯英,于海勋,译.北京:电 子工业出版社,2003:34-220.@@[4]曲建岭,吴文海,孙俊恩.三级倒立摆系统模糊控制器设计 及仿真[J].系统仿真学报,2004,16(3):578-581.@@[5]曲建岭,王磊,高峰.基于信息融合的多输入模糊控制 器设计方法[J].测控技术,1999,18(7):8-10.@@[6]陈江宁,潘笑.基于融合技术的单级倒立摆模糊控制器 [J].微计算机信息,2009,25(1):290-293. @@[7]周端,王敏,黄心汉.基于最优权值的二级倒立摆模糊 控制器[J].计算机与数字工程,2007,35(5):171-172, 198.@@[8]李士勇.模糊控制、神经控制和智能控制论[M].哈尔滨: 哈尔滨工业大学出版杜.1998:120-220.万方数据。
基于智能控制算法的二级倒立摆控制器设计

…基于智能控制算法的二级倒立摆控制器设计第一章绪论倒立摆系统是一个典型的多变量、非线性、强耦合的自然不稳定系统。
最近几年一直是控制领域研究的热点。
对倒立摆系统的研究不仅具有很重要的理论意义,而且在研究双足机器人直立行走,火箭发射过程的姿态调整和直升机飞行控制领域中也有指导性的现实意义。
本文围绕二级直线倒立摆系统,设计模糊控制器和神经网络控制器对二级倒立摆实现稳定控制。
实物控制的成功进一步证明了本文所设计的控制器具有很好的稳定性和抗干扰性。
主要研究工作如下:1)建立了二级倒立摆系统的数学模型,对倒立摆系统进行定性分析。
证明了倒立摆系统开环是不稳定的,但在平衡点是可控的。
同时,从相对可控度方面指出了二级倒立摆的相对可控度要比一级倒立摆小很多,更难以控制。
2)二级倒立摆的模糊控制器设计。
因为二级倒立摆的状态方程中有6个状态变量,所以模糊控制器的设计要求更高,要求它的输入维数不能太高,避免产生“规则爆炸”的问题。
规则必须有效而且完整。
为此,基于LQR最优二次理论,得出反馈矩阵,并以此构造出了降维矩阵,把状态变量进行有效的合并。
最后,设计出了二级倒立摆的稳定模糊控制器,经过实物实验,成功的实现二级倒立摆的稳定控制。
证明了本文所设计的二级倒立摆稳定模糊控制器的有效性。
—3)二级倒立摆的神经网络控制器基于实时控制时的样本数据,设计了BP网络,通过matlab对网络进行了训练,实验证明训练好的神经网络控制器有很强的适应性和抗干扰性能。
4) 二级倒立摆实物调试完成了对二级倒立摆实物的模糊控制和神经网络控制倒立摆系统研究的意义倒立摆系统的研究涉及到机器人技术、控制理论、计算机控制等多个领域,其本身是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,作为一个典型的控制对象一直以来受到不少专家学者的关注与研究。
人们试图通过倒立摆这样的一个典型对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找到最优秀的控制方法。
二级倒立摆的TS型逐级模糊神经网络控制
・ ・ ・ ・ ・ ・
and (θ 1 is N e ) then ( u is u9 )
If (θ 2 is Z e ) and (θ 2 is Z e ) and (θ 1 is N e )
・
・
10
and (θ 1 is Z e ) then ( u is u10 )
[ y1 y2 y3 ]
T T
・
, 由神经网络来构造
[ 8 ~10 ]
[ 4 ~7 ]
・
.
・
控制器参数采用遗传算法分 4 步优化
.
1 二级倒立摆模型
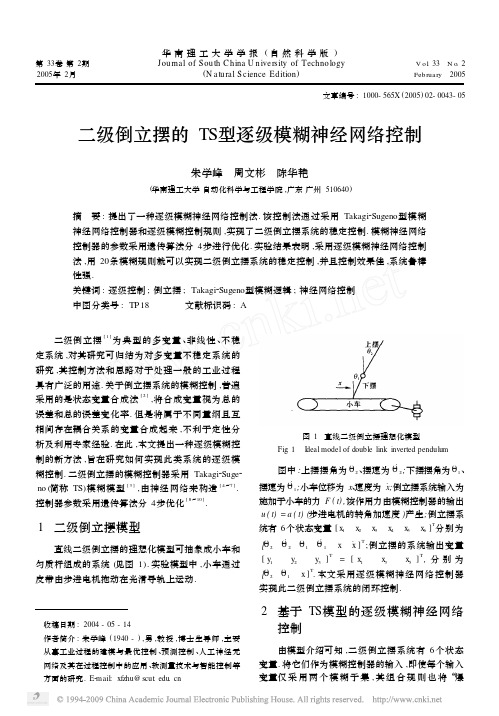
直线二级倒立摆的理想化模型可抽象成小车和 匀质杆组成的系统 (见图 1 ) . 实验模型中 ,小车通过 皮带由步进电机拖动在光滑导轨上运动 .
If (θ 2 is Z e ) and (θ 2 is Z e ) and (θ 1 is Z e )
・
・
16
and (θ 1 is Po ) then ( u is u16 )
If (θ 2 is Z e ) and (θ 2 is Z e ) and (θ 1 is Z e ) and (θ 1 is
T
ห้องสมุดไป่ตู้
and (θ 1 is Po ) then ( u is u11 )
If (θ 2 is Z e ) and (θ 2 is Z e ) and (θ 1 is Po )
・
・
・
・
・
T
12
and (θ 1 is N e ) then ( u is u12 )
If (θ 2 is Z e ) and (θ 2 is Z e ) and (θ 1 is Po )
模糊控制在二级倒立摆系统中的应用

中图 分 类 号 : TP2 3 7
多年来 , 国内外许 多专 家学 者对 倒立 摆系统 进行 了大量 的研究 . 目前应用 在倒立 摆 上的算 法有 以下 几 类: 经典控 制( MIP D ; L , I ) 现代控 制 ( 极点 配置法 , QR法 ) H。控制 ; 结构 控制 ; 糊 控制 ; 经 网络 控 L ; 。 变 模 神
表 1 二 级 倒 立摆 系统 符 号 参 数 表 图 1 二 级倒 立摆 系统 示 意 图
符号 含 义 小 车质 量 摆 杆 1质 量 m2 摆 杆 2质 量 』 摆 杆 1绕 (1的转 动 惯 量 )
取值 符 号 含义 1 3 g . 2k L 摆 杆 1的长 度 0 2 5k . l g L2 摆 杆 2的长 度 012 g . 3 k _ 小 车 与 导轨 问 的滑 动 摩 擦 系 厂 c 0 0 83 8k . 0 9 g・m。 _ 摆 杆 1绕 Ot的摩 擦 阻 力 矩 厂 厂 摆 杆 2绕 O 的摩 擦 阻力 矩 2 2 g 当 地 重 力加 速 度
摘 要 : 对 多 变 量 、 线 性 、 耦 合 性 的二 级 倒 立 摆 系 统 的 稳 定 控 制 问 题 . 先 , 针 非 强 首 为解 决 模 糊 控 制 在 多 变 量 系 统
中 常 遇 到 的“ 则 爆 炸 ” 规 问题 , 出 了一 种 基 于 融 合 函数 的模 糊 控 制 方 法 , 方 法 将 最 优 控 制 理 论 与 模 糊 控 制 提 该 理 论 相结 合 , 用 L 运 QR控 制 方 法 设 计 了 融合 函数 , 少 了 模糊 控 制 器 的 规 则 数 , 对 控 制参 数 进 行 了寻 优 和 减 并
S p., 1 e 20 0
二级倒立摆基于融合函数的模糊控制

收稿日期:-年-月-日;修回日期:-年-月-日. 基金项目:安徽工程科技学院青年科研基金(2008YQ047).作者简介:邢景虎(1980--),男,汉(安徽、芜湖市),讲师,硕士,从事电力电子技术及现代电力传动控制、智 能控制的研究。
二级倒立摆基于融合函数的模糊控制邢景虎(安徽工程科技学院 电气传动与控制安徽省高校重点实验室,安徽 芜湖241000)摘 要:采用模糊控制理论研究了二级倒立摆的控制问题。
考虑到二级倒立摆为多变量系统,为了解决模糊控制器规则组合爆炸问题,利用LQR 控制方法设计了融合函数以降低模糊控制器的输入变量维数,大大减少模糊控制的规则数,并研究了量化因子对控制效果的影响,通过设置阈值使量化因子可自动调节,进而提高模糊控制器的性能品质。
仿真和实验结果表明,这种模糊控制算法规则数少,响应速度快,有良好的稳定性和鲁棒性。
关键词:二级倒立摆;LQR ;模糊控制;融合函数;量化因子 中图分类号:TP273 文件标识码:AFusion Function Based Fuzzy Control for a Double InvertedPendulumXING Jing-hu(Anhui University of Technology And Science, Anhui Provincial key Laboratory of Electric and Control, Wuhu 241000, China. Correspondent:XING Jing-hu,E-mail:xingjinghu@ )Abstract: The fuzzy control theory is introduced to study the controlling problem of the double inverted pendulum in this paper. In order to solve the fuzzy rule number ’sexplosion in multi-variable system,the dimensions of input varieties of a fuzzy controller are depressed by designing a fusion function using the LQR theory, and it can reduce the rules of fuzzy greatly. The infection of quantification factors to the effect of control is studied. The quality of the fuzzy controller is improved by adding auto turning quantification factors. Simulation and experiment prove that this fuzzy control arithmetic has the advantages of few rules, fast speed, good stability and good robustness. Keywords:Double inverted pendulum; LQR;Fuzzy control; fusion function; quantification factors1 引言倒立摆系统是一个非线性、强耦合、多变量和自然不稳定的系统,倒立摆系统通常用来检验控制策略的效果,是控制理论研究中较为理想的实验装置。
直线二级倒立摆系统控制策略研究设计

毕业设计(论文)题目直线二级倒立摆控制策略研究毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。
据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:毕业论文(设计)授权使用说明本论文(设计)作者完全了解**学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。
有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。
学校可以公布论文(设计)的全部或部分内容。
保密的论文(设计)在解密后适用本规定。
作者签名:指导教师签名:日期:日期:注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
3.附件包括:任务书、开题报告、外文译文、译文原文(复印件)。
4.文字、图表要求:1)文字通顺,语言流畅,书写字迹工整,打印字体及大小符合要求,无错别字,不准请他人代写2)工程设计类题目的图纸,要求部分用尺规绘制,部分用计算机绘制,所有图纸应符合国家技术标准规范。
图表整洁,布局合理,文字注释必须使用工程字书写,不准用徒手画3)毕业论文须用A4单面打印,论文50页以上的双面打印4)图表应绘制于无格子的页面上5)软件工程类课题应有程序清单,并提供电子文档5.装订顺序1)设计(论文)2)附件:按照任务书、开题报告、外文译文、译文原文(复印件)次序装订3)其它摘要倒立摆是一个复杂的多变量强耦合不稳定非线性的系统,借助于这样一个系统可以有效的检测各种控制理论的好坏。
一种基于融合函数的二级倒立摆模糊控制器设计

0 10 0 01 0 00 0 00 - 21.62 0 0 39.45 0 0
0 0 1 0 0 0
$
x 0 %
% % %
θ %
%
0 %
二级倒立摆T-S模糊控制器优化设计
李志刚 1,吴 楠 2
(1. 华北理工大学 信息工程学院,河北 唐山 063210;2. 华北理工大学 电气工程学院,河北 唐山 063210)
摘 要:针对多维变量的被控对象进行模糊控制时存在“规则爆炸”等问题,提出基于融合函数的 T⁃S 模糊控制器设计
思 想 。 以 二 级 倒 立 摆 为 被 控 对 象 ,运 用 拉 格 朗 日 方 程 建 立 数 学 模 型 ;运 用 极 点 配 置 、函 数 融 合 等 方 法 ,并 结 合 并 行 分 布 补 偿
2018 年 11 月 1 日 第 41 卷第 21 期
现代电子技术 Modern Electronics Technique
DOI:10.16652/j.issn.1004⁃373x.2018.21.025
Nov. 2018 Vol. 41 No. 21
111二级倒立ຫໍສະໝຸດ T⁃S 模糊控制器优化设计收稿日期:2017⁃11⁃10
修回日期:2018⁃01⁃26
基金项目:河北省自然科学基金资助项目(F2013209203)
Project Supported by Natural Science Foundation of Hebei Province
(F2013209203)
制 器 ,虽 然 能 够 避 免 规 则 过 多 问 题 ,但 想 要 精 确 地 调 整 比 例 因 子 是 非 常 困 难 的 。 文 献 [11] 将 改 进 遗 传 算 法 引 入到小波神经网络来设计控制器,但是这种方法需要找 到 特 殊 的 环 境 ,否 则 容 易 陷 入 收 敛 缓 慢 ,早 熟 问 题 。 文 献[12]在 T⁃S 模糊控制器上对两个摆角进行设定,但是 这种方法容易陷入局部最优。文献[13]采用多种群遗传 算 法 虽 然 能 够 打 破 传 统 遗 传 算 法 的 缺 点 ,但 是 每 次“ 移 民 ”都 需 要 解 码 再 编 码 ,增 加 了 运 行 时 间 。 文 献 [14]通过 极点配置对系统设计了控制器,但是控制效果不是很好。
直线二级倒立摆控制课程设计指导书
直线两级倒立摆控制课程设计指导书一、课程设计目的学习直线两级倒立摆的数学建模方法,运用现代控制理论知识设计控制器,应用Matlab进行仿真并与实际系统运行结果进行对比分析。
通过本次课程设计,建立理论知识与实体对象之间的联系,加深和巩固所学的控制理论知识,增加工程实践能力。
二、课程设计内容1、应用动力学知识建立直线两级倒立摆的数学模型(微分方程的形式),并转变成状态空间的表达形式。
2、运用现代控制理论知识,按设计要求设计状态反馈控制器。
3、应用Matlab的Simulink建立控制系统的仿真模型,得出仿真结果。
4、将仿真设计所得的状态反馈设计参数应用于实际控制系统中,观察实际控制结果,对比仿真结果与实际输出结果,修正设计值,使之满足设计要求。
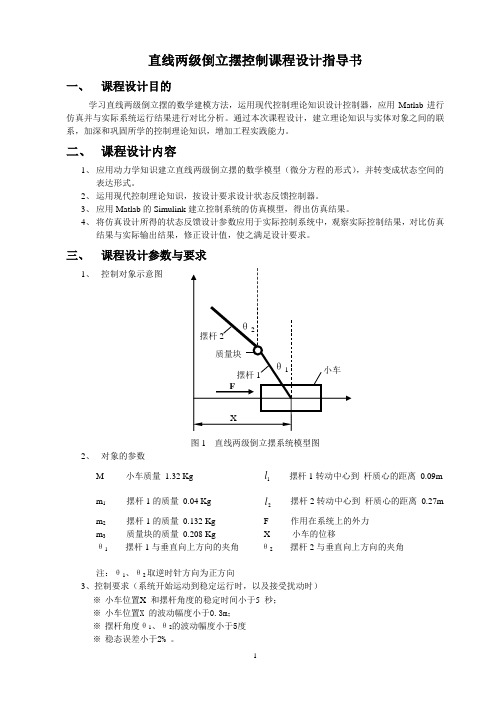
三、课程设计参数与要求1、控制对象示意图图1 直线两级倒立摆系统模型图2、对象的参数l摆杆1转动中心到杆质心的距离0.09m M 小车质量1.32 Kg1l摆杆2转动中心到杆质心的距离0.27m m1 摆杆1的质量0.04 Kg2m2 摆杆1的质量0.132 Kg F 作用在系统上的外力m3 质量块的质量0.208 Kg X 小车的位移θ1摆杆1与垂直向上方向的夹角θ2摆杆2与垂直向上方向的夹角注:θ1、θ2取逆时针方向为正方向3、控制要求(系统开始运动到稳定运行时,以及接受扰动时)※小车位置X 和摆杆角度的稳定时间小于5 秒;※小车位置X的波动幅度小于0.3m;※摆杆角度θ1、θ2的波动幅度小于5度※稳态误差小于2% 。
四、课程设计所需提交的内容1、系统建模的详细推导过程和状态反馈控制器的设计过程。
2、给出整个控制系统的Simulink仿真结构图。
3、计算系统引入状态反馈前和引入状态反馈后的极点,并用Matlab绘图功能绘制极点图。
4、应用Matlab绘图功能分别绘制系统在零输入状态(初始状态不为零)、扰动输入(扰动量持续时间≤0.5s)时的系统响应曲线图(只需X、θ1、θ2的响应曲线,在每一输入状态下,此三个量的响应曲线在同一图中体现),并给出给响应曲线的动态响应指标值。
模糊控制在二级倒立摆系统中的应用

模糊控制在二级倒立摆系统中的应用
模糊控制是一种基于模糊逻辑的控制方法,它可以应用于各种控制系统中,包括二级倒立摆系统。
二级倒立摆系统是一种常见的非线性系统,它由两个相互垂直的杆和一个可旋转的关节组成。
该系统具有高度非线性和不稳定性,对控制要求较高,而模糊控制则可以很好地解决这些问题。
在二级倒立摆系统中,模糊控制的应用通常涉及到以下几个方面。
首先,通过对系统的建模和仿真分析,可以确定二级倒立摆系统的运动特性和控制要求。
其次,根据系统的特点和要求,可以设计相应的模糊控制器,并进行实验验证。
最后,对实验结果进行分析和评估,以确定模糊控制在二级倒立摆系统中的有效性和优越性。
在具体的应用中,模糊控制通常采用基于规则的模糊控制方法,即根据一定的规则来进行控制决策。
具体而言,模糊控制器通常包括模糊化、规则库、模糊推理和解模糊四个部分。
其中,模糊化将系统输入转化为模糊量,规则库定义了一系列的控制规则,模糊推理根据输入的模糊量和规则库中的控制规则来确定控制输出,解模糊将模糊输出转化为具体的控制量。
在二级倒立摆系统中,模糊控制可以用于调节系统的角度和位置,以实现系统的稳定和控制。
具体而言,模糊控制器通常将摆杆的角度和位置作为系统的输入,输出控制信号,以调节系统的运动状态。
通过对模糊控制器的设计和调试,可以使二级倒立摆系统具有较好的控制性能和鲁棒性。
总之,模糊控制在二级倒立摆系统中的应用是一种有效的控制方法,可以提高系统的控制性能和鲁棒性,实现系统的稳定和控制。
基于模糊+PID+的二级倒立摆控制器的设计

作者签名:
日期:
曲阜师范大学研究生学位论文使用授权书
(根据学位论文类型相应地在“□”划“√”) 《基于模糊 PID 的二级倒立摆控制器的设计》系本人在曲阜师范大学攻
√ 学位期间,在导师指导下完成的博士□/硕士□ √ 学位论文。 读博士□/硕士□
本论文的研究成果归曲阜师范大学所有,本论文的研究内容不得以其他单位 的名义发表。本人完全了解曲阜师范大学关于保存、使用学位论文的规定, 同意学校保留并向有关部门送交论文的复印件和电子版本,允许论文被查阅 和借阅。本人授权曲阜师范大学,可以采用影印或其他复制手段保存论文, 可以公开发表论文的全部或部分内容。
关键词:倒立摆;模糊控制;PID 控制;模糊 PID 控制;MATLAB 仿真
I
Abstract
Double inverted pendulum is an instability system which has many variable, strong coupling and nonlinear. The double inverted pendulum can effectively reflect many questions, such as robustness, stabilizability and tracking performance etc. There are many instability and nonlinear systems in this area, at the same time, inverted pendulum can tested such systems, which is used in a control area and scholars frequently. The control methods of inverted pendulum were also widely used in military, robotics and other areas. In chapter 2, we describe the research development status of inverted pendulum control system , and expatiate the control results in the different developing periods. Because the object is to design the fuzzy PID controller, we first do the preparatory work of the relevant theory, which include the introduction of the PID and fuzzy theory. In chapter 3, we establish the mathematical model of inverted pendulum control system (state equation) and by using modern control theory analysis the controllability, observability and stability of two level inverted pendulum system. In chapter 4, the fuzzy PID controller design process is given, the fuzzy controller parameters are described and the fuzzy control rules and the reasoning process are developed. In chapter 5, the fuzzy PID controller is applied to the double inverted pendulum model by using MATLAB as the simulation tool, and then the fuzzy PID controller is applied to the actual double inverted pendulum system. The simulation and physical experiment results show that the fuzzy PID controller has higher stabilizability. Compared to PID controller, the fuzzy PID controller can avoid the drawbacks of manual adjustment parameter and not timely changing the parameter to meet the system requirements. The fuzzy PID controller designed in this thesis is superior to a single fuzzy control and PID control, and it is a very effective control method and the fast control and no error control are gotten.
(完整word版)二级倒立摆模糊控制设计

目录绪论 (6)1 倒立摆系统的建模 (7)1.1 倒立摆系统的特性分析 (7)1.2 二级倒立摆系统的数学建模 (8)1。
2。
1 基于牛顿力学的二级倒立摆系统数学模型建立 (9)1。
3 二级倒立摆系统数学模型的线性化处理 (10)2 线性二次型最优控制(LQR)的方案设计 (12)2。
1 二级倒立摆性能分析 (12)2。
1。
1 稳定性分析 (12)2.1.2 能控性能观性分析 (12)2。
2 线性二次型最优调节器原理 (13)2。
3 加权阵Q和R的选择 (15)3 模糊控制的基本原理 (16)3。
1 模糊理论的基本知识 (16)3.1.1 模糊控制概述 (16)3.1。
2 模糊集合 (17)3.1.3 模糊规则和模糊推理 (17)3。
1。
4 反模糊化 (19)3。
2 模糊控制系统的设计 (19)3。
2.1 模糊控制系统的组成及原理 (19)3。
2。
2 模糊控制器设计的基本方法与步骤 (20)3.3 二级倒立摆模糊控制器的设计 (21)4 二级倒立摆模糊控制系统的MATLAB仿真 (25)4.1 基于最优调节器的二级倒立摆控制系统的MATLAB仿真 (25)4.2 基于模糊控制器的二级倒立摆控制系统的MATLAB仿真 (28)4.2。
1 二级倒立摆模糊控制系统的仿真波形 (28)4。
2.2 量化因子和比例因子对模糊控制器性能的影响 (29)4.3 两种控制系统的MATLAB仿真对比研究 (30)结束语 (31)致谢 (32)参考文献 (33)附录 (34)摘要本文以二级倒立摆模型为控制对象,首先阐述了倒立摆系统控制算法的研究发展过程和现状,介绍了倒立摆系统的结构和数学模型,并详细推导了二级倒立摆的数学模型。
其次,本文主要研究倒立摆系统的现代控制方法以及智能控制方法,用LQR最优控制方法、模糊控制理论设计了控制器,通过MATLAB及SIMULINK仿真两个控制器,分析指出两方法的优缺点,结果表明:智能控制策略不仅能满足非线性系统的控制要求,而且能明显改善控制指标,整个系统具有更好的动态特性。
二级倒立摆的区间值模糊控制

I n t e r v a l — v a l u e d f u z z y c o n t r o l o f d o u b l e i n v e r t e d p e n d u l u m
XUE Z h a n - a o , L I Yu e - j u n , C HE NG Hu i — r u , XUE T i a n - y u
2 0 1 3年 9月
计 算 机 工程 与设 计
COMPUTER ENGI NEERI NG AND DES I GN
Se p t . 2 0 1 3
第 3 4卷
第 9 期
Vo 1 . 3 4 No . 9
二 级 倒 立 摆 的 区 问值 模 糊 控 制
o l l e g e o f Co mp u t e r a n d I n f o r ma t i o n E n g i n e e r i n g,H e n a n No r ma l Un i v e r s i t y ,Xi n x i a n g 4 5 3 0 0 7 ,Ch i n a )
实时控制 实验 ,对比分析 了区间值模糊控制 与点值模糊 控制的性能 。实验结果表 明 ,区间值模 糊控制具 有更好 的稳定性和
鲁棒性 。
关 键 词 :倒 立摆 ; 区间 值模 糊 集 ; 区 间值 模 糊 蕴 涵 ; 区 间值 模 糊 控 制 ;模 糊控 制 器 ;稳 定 性
中图法分 类号 : T P 1 8 文献标识号 :A 文章编号 :1 0 0 0 — 7 0 2 4( 2 0 1 3 )0 9 — 3 2 5 5 — 0 5
Ab s t r a c t : To i mp r o v e t h e s t a b i l i t y o f f u z z y c o n t r o l f o r i n v e r t e d p e n d u l u m ,t h e i n t e r v a l — v a l u e d f u z z y c o n t r o l o f d o u b l e i n v e r t e d p e n d u l u m i s s t u d i e d .Ba s e d o n t h e t h e o r y o f i n t e r v a l - v a l u e d f u z z y s e t s ,t h e i n t e r v a l s t r u c t u r e s a r e c o n s t r u c t e d b y c o mp o s i n g a v a — r i e t y o f me mb e r s h i p f u n c t i o n s .B y e mp l o y i n g t h e i n t e r v a l — v a l u e d i mp l i c a t i o n o p e r a t o r ,t h e c o n t r o l r u l e s a r e ma d e a n d t h e i n t e r v a l - v a l u e d f u z z y c o n t r o l l e r s o f d o u b l e i n v e r t e d p e n d u l u m a r e d e s i g n e d .Th e n t h e s i mu l a t i o n e x p e r i me n t s a n d r e a l t i me c o n t r o l e x p e r i — me n t s a r e d o n e a n d t h e p e r f o r ma n c e s o f t h e i n t e r v a l - v a l u e d f u z z y c o n t r o l l e r s a n d t h e p o i n t - v a l u e d f u z z y c o n t r o l l e r s a r e a n a l y z e d . Th e e x p e r i me n t a l r e s u l t s s h o w t h a t t h e i n t e r v a l - v a l u e d f u z z y c o n t r o l o f d o u b l e i n v e r t e d p e n d u l u m i s b e t t e r i n s t a b i l i t y a n d a n t i - i n — t e r f e r e n c e p e r f o r ma n c e . Ke y wo r d s :i n v e r t e d p e n d u l u m;i n t e r v a l - v a l u e d f u z z y s e t s ;i n t e r v a l — v a l u e d f u z z y i mp l i c a t i o n; i n t e r v a b v a l u e d f u z z y c o n t r o l ; f u z z y c o n t r o l l e r ;s t a b i l i t y
二级倒立摆系统的模糊控制

摆 掣
图 1 二 级 倒 立 摆 示 意 图
Fi .1 T —t g n u u s h mai ig a g wo sa e pe d l m c e tc d a r m
表 1 倒 立 摆 参 数 定 义
Ta . Pa a e e e ne ft nv r e e u u b1 r m trd f so i he i e t d p nd l m
c n r l fd u l v  ̄ d p n uu r a- mec nr l r b e ,d sg z y c n rle o to e s b l y o e iv  ̄e o to o b e i e e e d l m e l i o t o lm o n t op e in af z o tolrt c n r l h t i t f h n e d u o t a i t
+ + + () 2
合 误 差 变 化 率 ( 车 的 速 度 、 摆 的角 速 度 、 摆 的 角 速 度 ) 小 上 下
E C作 为 输 入变 量 , 电机 的控 制 力 u 为输 出变 量1 作 3 1 。
利 用命 令 K l ( B, R)得 到 反 馈 矩 阵 : =q A, Q, , r
9 9-
作 者 简 介 : 灵侠 ( 9 3 ) 女 , 西 西安 人 , 士 , 教 。研 究方 向 : 制 理 论 与 控 制 工程 。 焦 18 一 , 陕 硕 助 控
-
《 电子设计 工程  ̄ 0 2年 第 1 21 6期
坐标 上 的外 力 。系 统 的广 义 坐 标 有 3个 , 别 为 ,。0。 分 o,2 系统 的动 能 :
u s b 、 l-a al、 r g o pi n O n I rcue s i i r s ot lbetn n ier g ntipp r a uz nt l mutvr bes o - u l gadS .ts utr ml nr jc g e n. s a e, zy ae i i tn c n o st i s a a c oo ie n i I h f
二级倒立摆系统的模糊控制

二级倒立摆系统的模糊控制焦灵侠;任海波;郭敏【摘要】As a typical experiment device, inverted pendulum system has many characteristics, such as high-order,nonlinear, unstable,multi-variable ,strong-coupling and so on. Its structure is similar as control object in engineering.In this paper, a fuzzy control of double inverted pendulum real-time control problem, design a fuzzy controller to control the stability of the inverted pendulum system. Practice has proved that the fuzzy control of double inverted pendulum system is feasible.%倒立摆系统作为一种典型的实验装置,它具有高阶次、非线性、不稳定、多变量、强耦合等特点,可以很好的验证控制理论,并且与工程中的控制对象具有类似的结构。
文中采用模糊控制研究二级倒立摆系统的实时控制问题,设计模糊控制器控制倒立摆系统的稳定。
实践证明.模糊控制方法控制二级倒立摆系统的稳定是可行的。
【期刊名称】《电子设计工程》【年(卷),期】2012(020)016【总页数】4页(P99-101,105)【关键词】倒立摆;模型;模糊;实时控制;稳定【作者】焦灵侠;任海波;郭敏【作者单位】西安工业大学北方信息工程学院,陕西西安710032;西北机电工程研究所,陕西咸阳712099;榆林学院能源工程学院,陕西榆林719000【正文语种】中文【中图分类】TP273倒立摆是一种典型的高阶非线性、多变量、强耦合、绝对不稳定的实验装置,它具有结构简单、成本低廉、易于调整等特点,作为这样一个被控对象,只有有效的控制策略才能够使其稳定,同时它也是检验各种控制理论的实验平台。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录绪论 (1)1 倒立摆系统的建模 (2)1.1 倒立摆系统的特性分析 (2)1.2 二级倒立摆系统的数学建模 (3)1.2.1 基于牛顿力学的二级倒立摆系统数学模型建立 (4)1.3 二级倒立摆系统数学模型的线性化处理 (5)2 线性二次型最优控制(LQR)的方案设计 (8)2.1 二级倒立摆性能分析 (8)2.1.1 稳定性分析 (8)2.1.2 能控性能观性分析 (9)2.2 线性二次型最优调节器原理 (11)2.3 加权阵Q和R的选择 (13)3 模糊控制的基本原理 (14)3.1 模糊理论的基本知识 (14)3.1.1 模糊控制概述 (14)3.1.2 模糊集合 (15)3.1.3 模糊规则和模糊推理 (15)3.1.4 反模糊化 (17)3.2 模糊控制系统的设计 (17)3.2.1 模糊控制系统的组成及原理 (17)3.2.2 模糊控制器设计的基本方法与步骤 (18)3.3 二级倒立摆模糊控制器的设计 (19)4 二级倒立摆模糊控制系统的MATLAB仿真 (23)4.1 基于最优调节器的二级倒立摆控制系统的MATLAB仿真 (23)4.2 基于模糊控制器的二级倒立摆控制系统的MATLAB仿真 (26)4.2.1 二级倒立摆模糊控制系统的仿真波形 (26)4.2.2 量化因子和比例因子对模糊控制器性能的影响 (28)4.3 两种控制系统的MATLAB仿真对比研究 (29)结束语 (30)致 (31)参考文献 (32)附录 (33)摘要本文以二级倒立摆模型为控制对象,首先阐述了倒立摆系统控制算法的研究发展过程和现状,介绍了倒立摆系统的结构和数学模型,并详细推导了二级倒立摆的数学模型。
其次,本文主要研究倒立摆系统的现代控制方法以及智能控制方法,用LQR 最优控制方法、模糊控制理论设计了控制器,通过MATLAB及SIMULINK仿真两个控制器,分析指出两方法的优缺点,结果表明:智能控制策略不仅能满足非线性系统的控制要求,而且能明显改善控制指标,整个系统具有更好的动态特性。
最后完成了二级倒立摆系统控制程序的设计和调试,实验取得较好的仿真控效果,并对实验结果进行了详细的分析。
结论部分对本课题的意义、目的和工作容进行总结。
关键词:二级倒立摆,最优控制,模糊控制ABSTRACTThe paper is focused on the double inverted pendulum. After discussing the historical development process and the current tendency of the r e s e a r c h based on the inverted pendulum, the paper firstly introduced the structure and deduced the mathematical model of the double inverted pendulum. Then focuses mainly on the research of the inverted pendulum system's control using the dynamical control methods as well as the intelligent control methods, I developed the system controllers based on the LQR optimal control methods and the fuzzy control methods ,I also simulated the whole system by using the MATLAB and the SIMULIN K, after that the advantages and disadvantages of the two control methods has been analysed .So the conclusion indicates that the intelligent control strategies can not only achieve the controlling demand of the non-linear system, but also meliorate significantly the control index of the system, as a result , the whole system's dynamic characteristic has been improved greatly. Lastly, I designed and debugged the code for modeling as well as controlling the double inverted pendulum using the MATLAB. The desired result of the simulation has been realized and discussed in detail. The meaning, the purpose and the main content of the paper has been summarized in the end o f the paper.Key words: double inverted pendulum,optimal control,fuzzy controller绪论倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论设计及测试的理想实验平台。
倒立摆系统控制涉及到机器人技术、控制理论、计算机控制等多个领域。
其被控系统本身是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究[1]。
同时,由于实际机械系统中存在的各种摩擦力,实际倒立摆系统亦具有一定的不确定性。
倒立摆系统的控制涉及到许多典型的控制问题:非线性问题、随动及跟踪问题、鲁棒性问题、非最小相位系统的镇定问题等等。
正是由于倒立摆系统的特殊性,许多不同领域的专家学者在检验新提出理论的正确性和实际可行性时,都将倒立摆系统作为实验测试平台。
再将经过测试后的控制理论和控制方法应用到更为广泛的领域中去[1]。
如:把一级倒立摆的研究成果应用到对航空航天领域中的火箭发射推进器和卫星飞行状态控制的研究;把二级倒立摆的研究成果应道到双足机器人行走控制中[2]。
所以说,对倒立摆系统控制理论的研究不仅具有理论研究价值,也具有相当的实际工程应用价值。
倒立摆系统的传统控制方法主要是使用经典控制理论和现代控制理论。
它们都以精确的系统数学模型为控制对象。
经典控制理论在线性定常、输入输出量较少的系统中能很好的完成控制设计指标,经典控制理论的数学基础是拉普拉斯变换,占主导地位的分析和综合方法是频率域方法。
而现代控制理论是建立在状态空间分析法上的,基本分析方法是时域分析法。
这种方法能够克服经典控制理论的缺陷:能够解决系统的输入输出变量过多、系统的非线性等问题。
现代控制理论已经在工业生产过程、军事科学、航空航天等许多方面都取得了成功的应用。
例如极小值原理可以用来解决某些最优控制问题;利用卡尔曼滤波器可以对具有有色噪声的系统进行状态估计;预测控制理论可以对大滞后过程进行有效的控制。
但是它们都有一个基本的要求:需要建立被控对象的精确数学模型[3]。
随着科学技术的迅猛发展,各个领域对自动控制控制精度、响应速度、系统稳定性与适应能力的要求越来越高,所研究的系统也日益复杂多变。
然而由于一系列的原因,诸如被控对象或过程的非线性、时变性、多参数间的强烈耦合、较大的随机干扰、过程机理错综复杂、各种不确定性以及现场测量手段不完善等,难以建立被控对象的精确模型[4]。
虽然常规自适应控制技术可以解决一些问题,但围是有限的。
对于像二级倒立摆这样的非线性、多参数、强耦合的被控对象,使用传统控制理论难以达到良好的控制性能。
而模糊控制理论能够克服这些困难,达到实际设计要求。
1 倒立摆系统的建模1.1 倒立摆系统的特性分析直线型二级倒立摆系统是典型的机械电子系统。
这种倒立摆系统具有如下特性:(1).开环不稳定系统。
倒立摆系统有两个平衡状态:竖直向下和竖直向上。
竖直向下的状态是系统稳定的平衡点,而竖直向上的状态是系统不稳定的平衡点,开环时微小的扰动都会使系统离开竖直向上的状态而进入到竖直向下的状态中。
(2).不确定性。
主要是指建立系统数学模型时的参数误差、测量噪声以及机械传动过程中的非线性因素所导致的难以量化的部分。
(3).耦合特性。
倒立摆摆杆和小车之间,以及多级倒立摆系统的上下摆杆之间都是强耦合的。
这既是可以采用单电机驱动倒立摆控制系统的原因,也是使得控制系统的设计、控制器参数调节变得复杂的原因。
(4).仿射非线性系统。
倒立摆控制系统是一种典型的仿射非线性系统,可以应用微分几何方法进行分析。
(5).欠冗余性。
一般地,倒立摆控制系统采用单电机驱动,因而它与冗余结构,比如说冗余机器人有较大不同。
之所以采用欠冗余是要在不失系统可靠性的前提下节约经济成本或者有效的空间。
由于以上倒立摆的特性,在建模时,为了简单起见,忽略系统中一些次要的难以建模的因素,如空气阻力、伺服电机的静摩擦力、系统连接处的松弛程度、摆杆连接处质量分布不均匀、传动皮带的弹性以及传动齿轮的间隙等等。
将小车抽象为质点,摆杆抽象为匀质刚体,摆杆绕转轴转动,这样不仅可以简化分析,而且可以建立系统较为精确的数学模型。
1.2 二级倒立摆系统的数学建模二级倒立摆系统如图2.1所示。
二级倒立摆装置由沿导轨运动的小车和通过转轴固定在小车上的摆体组成。
在导轨一端装有用来测量小车位置的光电编码器。
摆体与小车之间、摆体与摆体之间有转轴连接,并在连接处有两个光电编码器分别用来测量下摆和上摆的角度。
下摆和上摆可以绕各自的转轴在水平导轨上左右运动,从而使倒立摆稳定在竖直位置并且可以沿着导轨倒立行走。
图2.1二级倒立摆系统建立系统的运动方程时,为了简化二级倒立摆系统的数学模型,忽略空气流动作用在摆杆上的力矩干扰,并做以下假设:(1).小车、下摆摆杆和上摆摆杆都是刚体;(2).皮带轮与皮带间无相对滑动,皮带不能拉伸变长;(3).小车与导轨之问的摩擦力与小车速度成正比;(4).各摆杆与转轴间的转动摩擦力矩与摆杆的角度成正比;在建立模型时,定义二级倒立摆物理参数符号:M, 小车质量,取0.595kg,下摆刚性摆杆质量,取0.161kg,上摆刚性摆杆质量,取0.142kg, 下摆质心到转轴的距离,取0.124m, 上摆质心到转轴的距离,取0.227m, 下摆摆杆长度,取0.151m, 上摆摆杆长度,取0.151m, 下摆摆杆与垂直向上方向所夹角度, 上摆摆杆与垂直向上方向所夹角度F, 倒立摆系统的控制力x, 小车的水平位移量下摆重心的水平位移量上摆重心的水平位移量下摆重心的垂直位移量上摆重心的垂直位移量, 小车与平台间的动摩擦系数,取11(), 下摆与转轴间的摩擦阻力矩系数,取0.00324(), 上摆与转轴间的摩擦阻力矩系数,取0.000774(), 下摆到下摆质心的转动惯量,取0.00284(), 上摆到上摆质心的转动惯量,取0.002433()1.2.1 基于牛顿力学的二级倒立摆系统数学模型建立(1).对上摆进行受力分析:对上摆列转矩平衡方程,可得(2-1) 对上摆列水平方向受力方程,可得(2-2) 对上摆列垂直方向受力方程,可得(2-3) (2).对下摆进行受力分析:对下摆列转矩方程,(2-4) (3).对整个倒立摆系统进行受力分析:(2-5) 联立上面所有方程,并消去,可得二级倒立摆模型方程:(2-6)(2-7)(2-8)1.3 二级倒立摆系统数学模型的线性化处理为了简化分析过程,必须对二级倒立摆系统数学模型进行一定的简化。