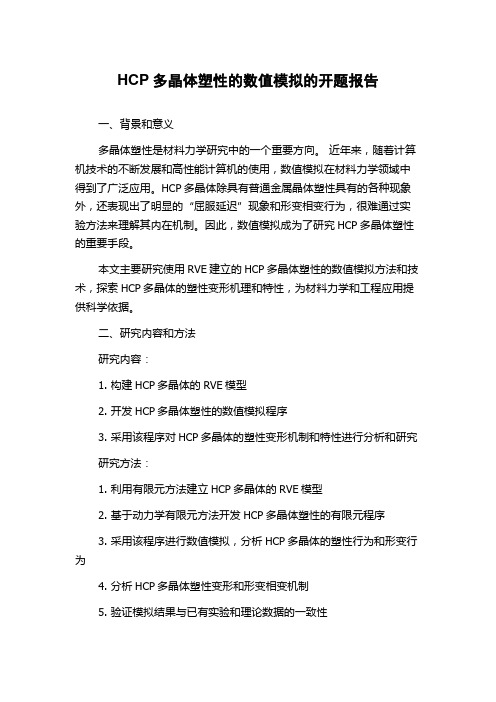
hcp金属塑性变形与疲劳机理
金属的塑性变形原理解析
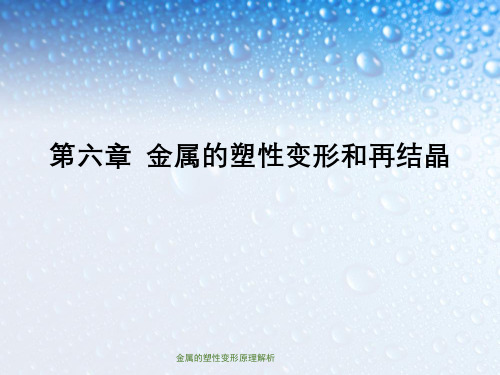
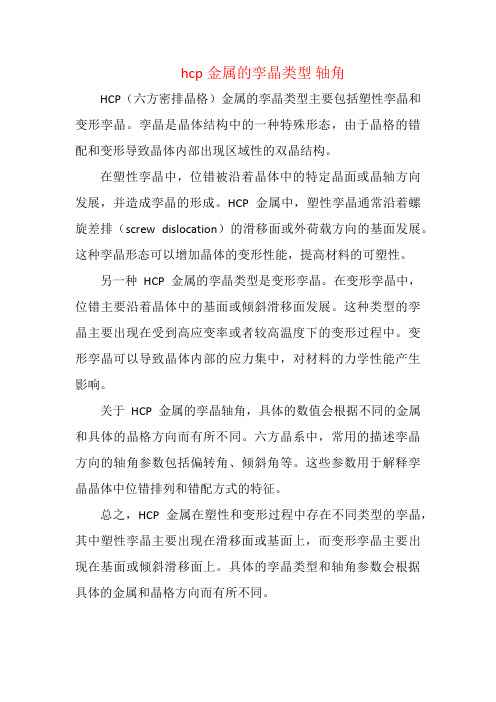
bcc {110}〈111〉
6×2=12
fcc {111}〈110〉
6×2=12
金属的塑性变形原理解析
hcp {0001}〈1 1 20〉
1×3=3
滑移的临界分切应力 晶体的滑移是在切应力的作用下进行的。但晶体受力时并非所有
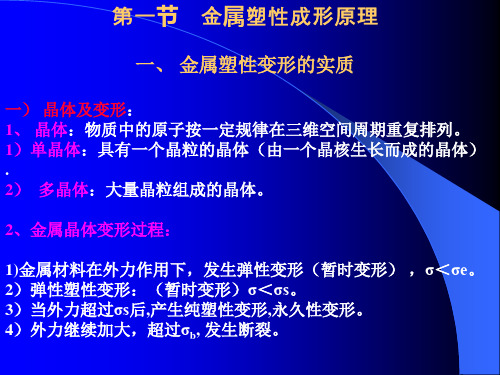
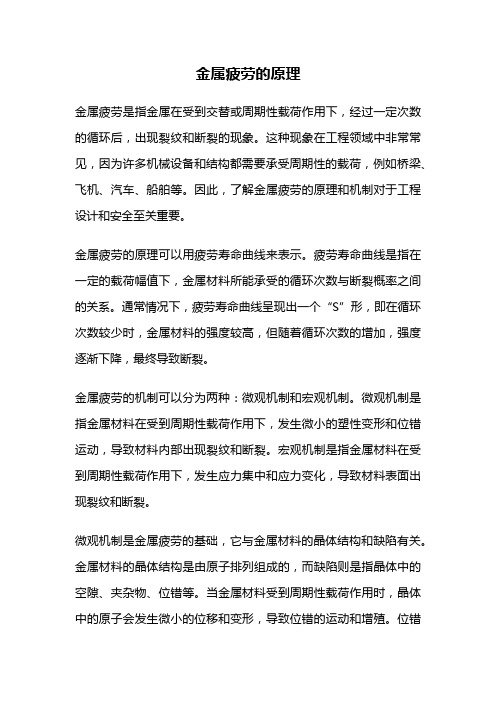
e 蜷线状的位错 环分成两个部分, 结点之间的曲线段 和四周的位错环。 (e)
d
f
在线张力的作用下, 结点之间的曲线段伸直, 还原为原来的位错线段; 位错环在线张力的作用继 续向外扩展,形成一个圆 形的环。
如此往复进行,可从 这种有固定端点的位错线 段生出大量的位错环。(f)
金属的塑性变形原理解析
位错的交割
的滑移系都同时参与滑移。而是只有当外力在某一滑移系中的分切应力 首先达到一定的临界值时,这一滑移系才开动,晶体开始滑移。
使滑移系开动的最小分切应力称为滑移的临界分切应力,以 k
表示。
计算方法: 设圆柱形金属单晶体试样的横截面
积为A,受到轴向拉力 F 的作用。 F 与滑移方向的夹角为 λ,则 F 在
σ = E ε 或 τ= Gν
式中,σ为正应力,τ为切应力,ε、ν分别为正应变和切应变,比例常数
E 称为正弹性模量或杨氏模量,G为切弹性模量。
上式可改写为:
E =σ/ε 或 G=τ/ν
弹性模量E、G是表征金属材料对弹性变形的抗力。工程上常称为零
件或构件的刚度。在其它条件相同时,金属的弹性模量越高,则制成的
金属 类别
铝 铜 金 银 铅 铁 钨 镁 锌 钛 铍 镍
第一节金属塑性成性原理
二)单晶体的塑性变形:
1、塑性变形的实质- 滑移变形.
单晶体受力后,外力在 任何晶面上都可分解为正应 力σ和切应力τ。 1)正应力σ:正应力σ使晶 格被拉长,只能造成晶体弹 性变形及断裂,而不能引起 晶体的塑性变形。
2)切应力τ:
(1)在切应力τ的作用下,金属晶体产生剪切变形, 即晶格歪扭。切应力τ较小时只发生弹性变形。
(1)生产方式:热锻、热轧、热挤压 .
(2)特点:
a)加工硬化和再结晶同时发生; b)冶金缺陷得到改善或消除; c)最终得到细小的等轴晶; d)组织致密,力学性能显著提高 e)变形程度大。
3) 温变形:自学
5 、纤维组织和锻造流线
铸锭组织不均,晶粒粗大,气孔、夹杂,塑性变形后, 晶粒及夹杂沿变形方向被拉长或压扁,呈纤维状及流 线分布。
工业中实际使用的金属大多是多晶体。
1、多晶体的特征: 1)晶粒的形状和大小不等 2)相邻晶粒的位向不同 3)多晶体内存在大量晶界
2、多晶体的塑性变形:
多晶体塑性变形比单晶体复杂得多,包括晶内变形和晶 间变形。
1)晶内变形:多晶体中单个晶粒变形与单晶体相似,
即,滑移变形和双晶变形,但,各晶粒的晶界附近,晶 格排列很不规则,位向各不相同,因而变形阻力大大增 加,晶内变形难以向相邻的晶粒继续扩展。
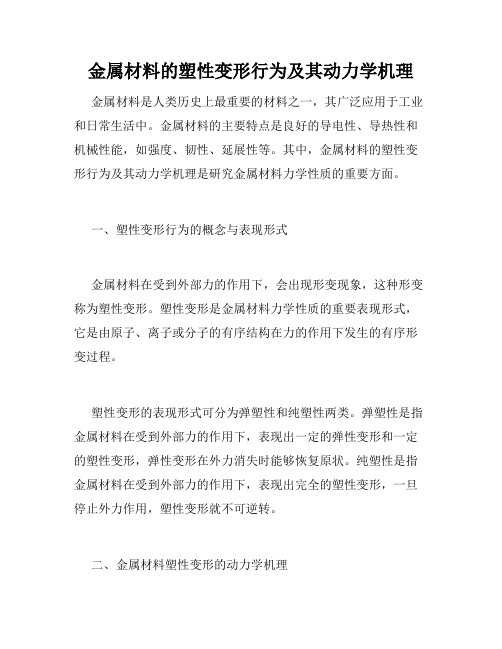
位错运(移)动引起滑移,位错运(移)动到晶体表 面就实现整个晶体的塑性变形。
刃位错的产生及运动
滑移面上位错的运动类似多脚虫爬行运动
多脚 虫 的 爬 行
还需指出: 晶体滑移不是只发生在一个晶面上,而是在相邻的一组晶面 上同时或先后发生,从而形成明显的滑移带(由很多滑移线 组成)。
滑移线:滑移的结果在晶体表面形成的一个个台阶。 滑移带:由若干条滑移线组成。 滑移系:一个滑移面和其上的一个滑移方向构成。
金属材料的塑性变形行为及其动力学机理
金属材料的塑性变形行为及其动力学机理金属材料是人类历史上最重要的材料之一,其广泛应用于工业和日常生活中。
金属材料的主要特点是良好的导电性、导热性和机械性能,如强度、韧性、延展性等。
其中,金属材料的塑性变形行为及其动力学机理是研究金属材料力学性质的重要方面。
一、塑性变形行为的概念与表现形式金属材料在受到外部力的作用下,会出现形变现象,这种形变称为塑性变形。
塑性变形是金属材料力学性质的重要表现形式,它是由原子、离子或分子的有序结构在力的作用下发生的有序形变过程。
塑性变形的表现形式可分为弹塑性和纯塑性两类。
弹塑性是指金属材料在受到外部力的作用下,表现出一定的弹性变形和一定的塑性变形,弹性变形在外力消失时能够恢复原状。
纯塑性是指金属材料在受到外部力的作用下,表现出完全的塑性变形,一旦停止外力作用,塑性变形就不可逆转。
二、金属材料塑性变形的动力学机理金属材料塑性变形的动力学机理主要包括滑移和剪切。
滑移是指晶格内部原子、离子或分子在外部应力作用下,在一定的晶格面和方向上沿晶格平面错开,使得整个晶体沿应力方向发生了塑性形变。
可以把滑移想象成晶格平面的滑动,其中滑动较容易发生的是(111)面和(100)面。
滑移不仅适用于单晶材料,也适用于多晶和多晶固溶体材料。
剪切是指在晶体中沿着一个晶面剪切另一个晶面而引起塑性形变。
剪切主要涉及到晶界和变形区的相互作用,其中晶界可以作为剪切面。
剪切的能量消耗要比滑移大得多,但是它对温度敏感性比滑移小,容易引起大规模位错滞后和晶界移动。
在金属材料中,滑移和剪切是相互竞争的,它们的作用对金属的塑性变形和强度产生了重要影响。
三、金属材料塑性变形的调节和增强方法金属材料塑性变形的调节和增强主要包括合金化、微结构控制和纳米加工等方法。
合金化是一种有效的方法,可以通过合理选择合金元素来控制晶体结构和化学成分,从而调控金属材料的塑性变形。
例如,添加易形变的合金元素可以促进位错堆积,增加位错密度和位错强度,从而提高金属材料的塑性变形。
材料的塑性变形机理和性能控制

材料的塑性变形机理和性能控制材料是人类社会发展的重要基石,是各种工业产品的基础。
在大多数制造过程中,材料的塑性变形是不可避免的。
而塑性变形机理和性能控制是材料科学与工程中一个重要的研究领域。
一、塑性变形机理塑性变形是指材料在一定条件下受到外力作用形成塑性变形并保持下去的能力。
材料的塑性变形是由其内部结构的变化而引起的。
塑性变形的主要机理就是晶体内部滑移与游移。
晶体内部的晶格缺陷对塑性变形过程中的原子滑移和游移起着关键作用。
对于晶体而言,其内部结构具有规则的排列方式,称为晶格。
而晶格缺陷包括点缺陷、线缺陷和面缺陷。
在材料中,当受到外力作用时,原子在晶格内的移动会带来晶体内部结构的变化。
这种移动就是原子的滑移和游移。
滑移是指在相邻原子之间形成一些小的位错(错位点),使得晶体原子发生运动。
游移是指在晶体内部的缺陷上发生原子位移。
这两种运动形式是材料塑性变形的主要机理。
除了晶格缺陷,另一个重要的因素是晶界。
晶界是晶体中不同晶粒之间的界面,其存在会影响材料的特性,例如强度和延展能力等。
总之,塑性变形的机理是一个相对复杂的过程,需要深入研究晶格结构和其缺陷的变化情况。
二、性能控制为了实现工业产品的高效、高质量生产,对材料的性能进行有效控制十分关键。
从塑性变形的角度来看,这包括两个方面:强度和延展能力。
强度是材料阻抗外部应力的能力,在材料的塑性变形方面具有重要作用。
材料的强度受多种因素影响,包括晶粒尺寸、晶格结构和组织等等:例如,晶粒尺寸越小,其阻力就越大,从而提高材料强度。
延展能力是材料在承受应变时的变形程度。
合适的延展能力可以使材料更加可塑,适应更多种形状和用途。
在强度和延展能力之间,需要一个权衡。
例如,当强度越高时,延展性可能越差。
此外,还有一些因素可以通过材料加工和热处理进行控制,例如冷变形、淬火和退火等。
冷变形(例如轧制、拉伸和锻造等)可以增加材料的强度和硬度,从而提高其抵抗变形的能力。
淬火可以使材料更加坚硬,其中的快速冷却过程有助于将晶体结构固态化并提高材料机械性能。
hcp结构镁合金{0001}基面织构

hcp结构镁合金{0001}基面织构1. 引言1.1 概述镁合金作为一种轻质高强材料,具有广泛的应用前景和市场需求。
然而,由于其晶体结构的特殊性,降低其塑性和机械性能成为了一个亟待解决的问题。
因此,研究镁合金的晶体结构和织构对于改善其力学性能和应用范围具有重要意义。
本文着重探讨了在镁合金中常见的一种晶体结构-六方密堆垒结构(HCP)。
通过研究HCP 结构镁合金的{0001}基面织构对其力学性能的影响,可以在某种程度上提高其塑性和韧性,从而扩大其应用范围。
1.2 文章结构本文共分为五个部分。
首先是引言部分,包括文章的概述、目的以及整体框架。
第二部分介绍了HCP 结构以及镁合金材料的特点,并探讨了HCP 结构在镁合金中的应用现状。
接下来第三部分详细阐述了{0001}基面织构的定义、意义以及织构研究方法与应用前景。
第四部分展示了相关实验和计算分析结果,并进行了不同织构条件下的性能对比分析。
最后,第五部分总结了研究成果并对未来的改进方向和应用前景进行了展望。
1.3 目的本文旨在深入探讨HCP 结构镁合金中{0001}基面织构的特性和影响因素,以期为镁合金材料的开发和应用提供科学依据和理论支持。
通过分析实验和计算结果,我们可以更好地了解该结构对于镁合金力学性能的影响机制,并为进一步优化材料设计提供指导。
此外,本文还将探讨目前存在的问题,并提出改进方向,促进该领域研究的快速发展。
2. HCP结构和镁合金2.1 HCP结构介绍HCP(Hexagonal Close-Packed)即六方最密堆积结构,是一种常见的晶体结构。
它由紧密堆积的原子或离子排列而成,具有六角形的基本晶胞。
HCP结构具有高度对称性和特殊的晶胞参数,其晶格常数a和c之间存在关系,即c ≈(8/3)^0.5a。
HCP结构在自然界中广泛存在,如钙、镁等金属以及一些硅酸盐矿物均采用了HCP结构。
2.2 镁合金特点镁合金是一类以镁为主要成分的合金材料。
金属塑性成形原理金属塑性变形的物理基础PPT课件

• 较强相体积分数高于70%,该相变为基体相
第45页/共97页
弥散型两相合金的塑性变形
当第二相以细小弥散的微粒均匀分布于基体相
中时,将产生显著的硬化现象
•
沉淀强化(时效强化):第二相微粒是通过对过饱和固溶体的时效处理而沉淀析出并产生强化
•
相协调。
第39页/共97页
二、塑性成形的特点
❖
❖
❖
受晶界和晶粒位向的影响较大
多晶体塑性变形的抗力比单晶体高;
多晶体内晶粒越细,晶界总面积就越大,金属强度越高,塑性越好。
多晶体变形不均匀性
晶粒受位向和晶界的约束,变形先后不一致,导致变形不均匀。
由于变形不均匀,晶粒内部和晶粒之间存在不同的内应力,变形结束后不会
交滑移
• 对于螺型位错,所有包含位错线的晶面都可能成为滑移面。
• 交滑移:螺形位错的柏氏矢量具有一定的灵活性,当滑移受阻是,可离开原滑移
面而沿另一晶面继续移动
• 双交滑移:发生交滑移的位错,滑移再次受阻,而转到与第一次的滑移面平行的
的晶面继续滑移
• 刃型位错不可能产生交滑移
第31页/共97页
位错塞积
原子能量随位置的变化为一余弦函数。
❖ 通过计算晶体的临界剪切应力,并与实际的临界
剪切应力进行比较,人们发现,理论计算的剪切
强度比实验所得到的剪切强度要高一千倍以论
为了解释这种理论值和实际值的差别,1934年泰
勒()、奥罗万(E.Orowan)、和波兰伊
(M.Polanyi)几乎在同一时间内,分别提出了位
当退火状态的低碳钢试样拉伸到超过屈服点发生少量塑性变形
金属塑性变形原理
金属塑性变形原理1、变形和应力1.1塑性变形与弹性变形金属晶格在受力时发生歪扭或拉长,当外力未超过原子之间的结合力时,去掉外力之后晶格便会由变形的状态恢复到原始状态,也就是说,未超过金属本身弹性极限的变形叫金属的弹性变形。
多晶体发生弹性变形时,各个晶粒的受力状态是不均匀的。
当加在晶体上的外力超过其弹性极限时,去掉外力之后歪扭的晶格和破碎的晶体不能恢复到原始状态,这种永久变形叫金属的塑性变形。
金属发生塑性变形必然引起金属晶体组织结构的破坏,使晶格发生歪扭和紊乱,使晶粒破碎并且使晶粒形状发生变化,一般晶粒沿着受力方向被拉长或压缩。
1.2应力和应力集中塑性变形时,作用于金属上的外力有作用力和反作用力。
由于这两种外力的作用,在金属内部将产生与外力大小相平衡的内力。
单位面积上的这种内力称为应力,以σ表示。
σ=P/S式中σ——物体产生的应力,MPa:P——作用于物体的外力,N;S——承受外力作用的物体面积,mm2。
当金属内部存在应力,其表面又有尖角、尖缺口、结疤、折叠、划伤、裂纹等缺陷存在时,应力将在这些缺陷处集中分布,使这些缺陷部位的实际应力比正常应力高数倍。
这种现象叫做应力集中。
金属内部的气泡、缩孔、裂纹、夹杂物及残余应力等对应力的反应与物体的表面缺陷相同,在应力作用下,也会发生应力集中。
应力集中在很大程度上提高了金属的变形抗力,降低了金属的塑性,金属的破坏往往最先从应力集中的地方开始。
2、塑性变形基本定律2.1体积不变定律钢锭在头几道轧制中因其缩孔、疏松、气泡、裂纹等缺陷受压缩而致密,体积有所减少,此后各轧制道次的金属体积就不再发生变化。
这种轧制前后体积不变的客观事实叫做体积不变定律。
它是计算轧制变形前后的轧件尺寸的基本依据。
H、B、L——轧制前轧件的高、宽、长;h、b、l——轧制后轧件的高、宽、长。
根据体积不变定律,轧件轧制前后体积相等,即HBL=hbl2.2最小阻力定律钢在塑性变形时,金属沿着变形抵抗力最小的方向流动,这就叫做最小阻力定律。
金属及合金的塑性变形

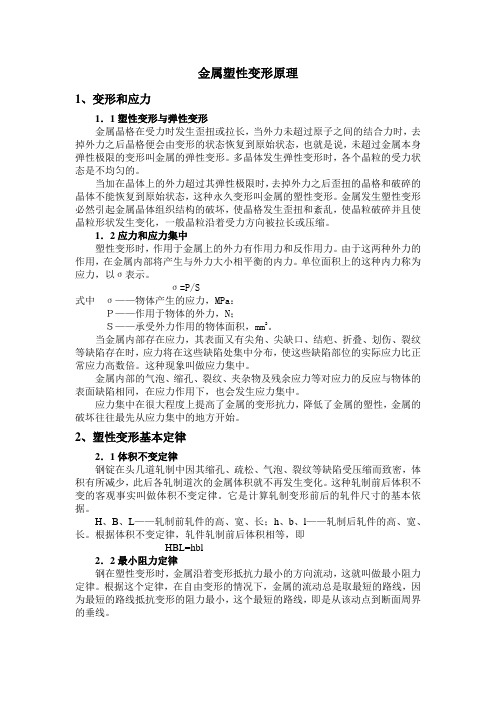
应力-应变曲线分析
弹性阶段
在应力作用下,金属首先发生 弹性变形,应力与应变成正比
关系,遵循胡克定律。
屈服阶段
当应力达到金属的屈服强度时, 金属开始发生塑性变形,应力-应 变曲线出现屈服平台或屈服点。
强化阶段
随着应变的增加,金属的加工 硬化效应逐渐显现,应力随之 上升,呈现强化现象。
断裂阶段
当应力达到金属的抗拉强度时 ,金属发生断裂。
03
形
多晶体结构特点及影响因素
结构特点
多晶体由许多取向不同的小晶体(晶粒)组成,晶粒之间存在晶界。
影响因素
晶粒大小、晶界结构、第二相粒子、温度、应变速率等。
晶界在塑性变形中作用
要点一
阻碍位错运动
晶界是位错运动的障碍,使位错在晶界处塞积,引起应力 集中。
要点二
协调变形
晶界能协调不同晶粒之间的变形,使多晶体能够保持连续 性变形。
新型塑性变形机制的探索
随着新材料和新技术的不断涌现,未来可能会出现新的塑性变形机制。探索这些新型塑性变形机 制将有助于拓展金属及合金的应用领域并提升其性能。
THANKS.
加工硬化现象及机制
加工硬化现象
金属在塑性变形过程中,随着变形量的增加,其强度和硬度逐渐提高,而塑性 和韧性逐渐降低的现象。
机制
加工硬化的机制主要包括位错增殖、晶粒细化和相变等。其中,位错增殖是金 属塑性变形过程中加工硬化的主要原因,位错密度增加导致金属强化。
金属单晶体的塑性变
02
形
单晶体滑移与孪生过程
金属及合金的塑性变形
目录
• 塑性变形基本概念与原理 • 金属单晶体的塑性变形 • 金属多晶体的塑性变形 • 合金的塑性变形行为及特点 • 塑性变形对金属及合金性能影响 • 总结与展望
金属的塑型变形实验原理

金属的塑型变形实验原理
金属的塑性变形实验原理是利用金属材料的塑性特性,通过给定一定的力对金属进行拉伸、压缩或弯曲等变形,分析金属在不同条件下的变形特性和力学行为。
金属的塑性变形实验通常包括以下几个基本原理:
1. 塑性变形特性:金属具有较高的塑性,即在一定的应力作用下,金属会发生永久性的形变而不会恢复原状。
金属材料的塑性变形主要是通过晶格滑移、晶界滑移和位错运动等机制发生的。
2. 塑性变形应力应变关系:应力是单位面积上的应力矢量,而应变是单位长度上的变形量。
金属在塑性变形过程中的应力与应变之间存在一定的关系,通常在线性弹性阶段可以近似认为是线性关系,但在超过一定应变值后,开始显现出非线性的本构行为。
3. 流动应力:流动应力是指金属在外力作用下发生塑性变形的能力。
金属材料的塑性变形需要克服材料内部的阻力,即流动应力,才能进行连续的塑性变形。
4. 力学行为分析:通过施加不同的力或应力,可以让金属经历不同的变形形式,如拉伸、压缩、剪切等,进而分析金属的力学行为,如抗拉强度、屈服强度、延伸率等物理力学参数。
5. 实验装置:为了进行金属的塑性变形实验,通常需要使用相应的实验装置,
如万能材料试验机、拉压试验机、材料拉伸试验机等,以施加不同的力或应力,记录和分析金属的变形情况。
金属材料塑性变形机制与特点

第三章 塑性变形
单击添加副标题
3.1金属材料塑性变形机制与特点
单击添加副标题
3.1.1 金属晶体塑性变形的机制 3.1.2 多晶体材料塑性变形特点
3.1.1 金属晶体塑性变形的机制
定义 fcc: {111} <110>; bcc: {110} {112} {123} <111> 滑移系 hcp: {0001} 定义 hcp 滑移系少,故常以孪生方式进行 fcc bcc 孪生变形量是很有限的,它的作用改变晶体取向,以便启动新的滑移系统,或使难于滑移的取向改变为易于滑移的取向。
位错运动速率与外力有强烈依存关系。
01
02
03
屈服现象产生与下述三个因素有关:
冷变形金属的真应力-应变关系
颈缩条件分析
韧性的概念及静力韧度分析
3.3真应力-应变曲线及形变强化规律
当应力超过屈服强度之后,塑性变形并不像屈服平台那样连续流变下去,而需要继续增加外力才能继续进行,于是应力-应变曲线上表现为流变应力不断上升,出现了所谓形变强化现象。材料在形变强化阶段的变形规律用其应力-应变曲线(也叫流变曲线)描述。
物理屈服现象首先在低碳钢中发现,尔后在含有微量间隙溶质原子的体心立方金属,如Fe、Mo、Nb 、Ta等,以及密排六方金属,如Cd和Zn中也发现有屈服现象。
01
对屈服现象的解释,早期比较公认的是溶质原子形成Cottrell气团对位错钉扎的理论。以后在共价键晶体如硅和锗,以及无位错晶体如铜晶须中也观察到物理屈服现象。
则定义二者的比值: α——软性系数, α↑→τmax↑→应力状态越软,金属易于 先产生塑性变形。 α↓→应力状态越硬→金属易于产生脆性 断裂。
测硬度时,其应力状态相当于三向不等压缩,因此,硬度试验时的加载方式属于很软的应力状态。
hcp金属的孪晶类型 轴角
hcp金属的孪晶类型轴角
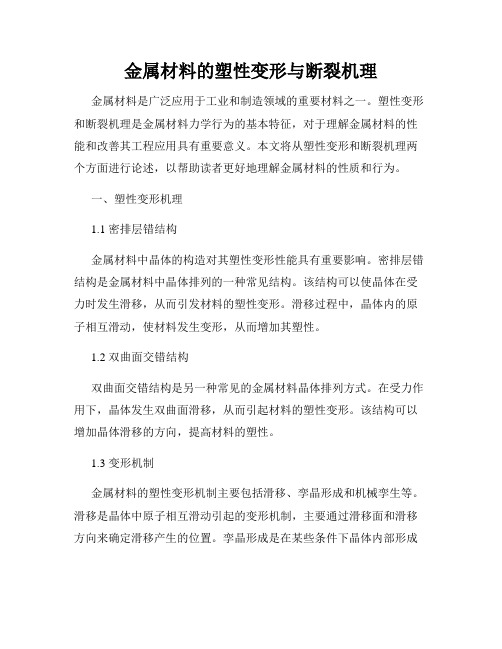
HCP(六方密排晶格)金属的孪晶类型主要包括塑性孪晶和变形孪晶。
孪晶是晶体结构中的一种特殊形态,由于晶格的错配和变形导致晶体内部出现区域性的双晶结构。
在塑性孪晶中,位错被沿着晶体中的特定晶面或晶轴方向发展,并造成孪晶的形成。
HCP金属中,塑性孪晶通常沿着螺旋差排(screw dislocation)的滑移面或外荷载方向的基面发展。
这种孪晶形态可以增加晶体的变形性能,提高材料的可塑性。
另一种HCP金属的孪晶类型是变形孪晶。
在变形孪晶中,位错主要沿着晶体中的基面或倾斜滑移面发展。
这种类型的孪晶主要出现在受到高应变率或者较高温度下的变形过程中。
变形孪晶可以导致晶体内部的应力集中,对材料的力学性能产生影响。
关于HCP金属的孪晶轴角,具体的数值会根据不同的金属和具体的晶格方向而有所不同。
六方晶系中,常用的描述孪晶方向的轴角参数包括偏转角、倾斜角等。
这些参数用于解释孪晶晶体中位错排列和错配方式的特征。
总之,HCP金属在塑性和变形过程中存在不同类型的孪晶,其中塑性孪晶主要出现在滑移面或基面上,而变形孪晶主要出现在基面或倾斜滑移面上。
具体的孪晶类型和轴角参数会根据具体的金属和晶格方向而有所不同。
金属塑性变形原理

金属塑性变形原理金属塑性变形是指金属材料经过外力作用下,由原来的固态结构发生变形,而不会恢复到原始形状的现象。
金属塑性变形是金属加工过程中的重要现象,也是金属材料学的基础知识之一。
金属塑性变形的原理是金属材料内部的晶体结构发生改变。
金属的晶体结构由原子或离子组成,其中原子或离子按照一定的方式排列,形成了晶体的结晶格,并且由晶粒间的晶界分隔开来。
在金属塑性变形过程中,加入的外力使得原子或离子离开原来的位置,发生位移,并且使得晶粒间的晶格发生变形。
在外力作用下,晶粒内的晶界也会发生位移,产生滑移。
滑移是金属塑性变形的基本机制之一。
滑移是指晶体中的原子或离子在晶胞内沿着特定的晶面或晶轴方向移动,形成滑移面和滑移方向。
滑移是一种原子密集度不变的塑性变形方式,即滑移面上的原子密集度和滑移前后相等。
滑移过程中,原子或离子之间的相互作用能量发生改变,导致滑移力的产生。
滑移力的产生使晶体产生滑移应力,使得滑移面上的原子或离子沿着滑移方向发生位移,从而引起整个晶粒的塑性变形。
除了滑移,金属材料的塑性变形还涉及扩散、再结晶等机制。
扩散是指金属内部原子或离子相互扩散,使得原子或离子重新排列,从而使晶体发生塑性变形。
再结晶是指金属材料在过度变形后,晶体结构发生重组,原晶体结构消失而形成新的晶体结构的过程。
再结晶是一种细化晶粒的方法,可以提高金属材料的塑性、延展性和硬度。
金属塑性变形的原理还与金属材料的晶体结构、晶界、晶体缺陷等因素有关。
金属材料的晶体结构与晶粒尺寸、晶粒取向有关,不同的晶体结构对塑性变形的机制有影响。
晶界是指晶粒之间的界面,晶界对金属材料的弹性和塑性性能有重要影响。
晶体缺陷包括晶体缺陷、晶界缺陷和位错等,对金属塑性变形有密切关系。
总之,金属塑性变形是金属加工中的重要现象,其原理涉及滑移、扩散、再结晶等机制。
金属塑性变形的机制与金属材料的晶体结构、晶界、晶体缺陷密切相关,对金属材料的性能和加工性能有重要影响。
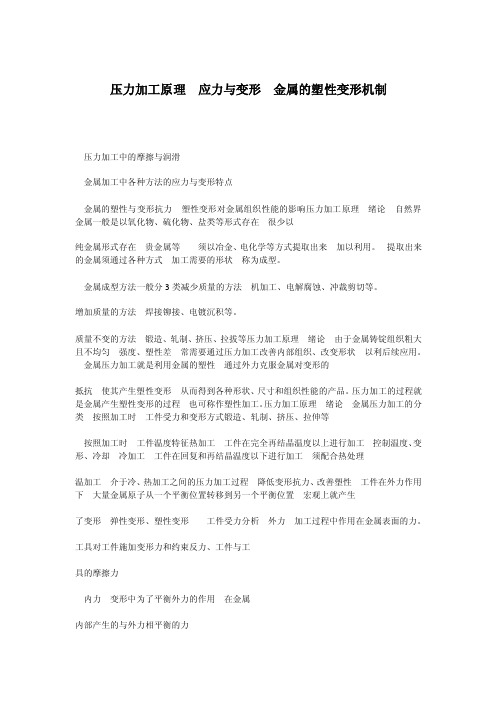
金属疲劳的原理
金属疲劳的原理金属疲劳是指金属在受到交替或周期性载荷作用下,经过一定次数的循环后,出现裂纹和断裂的现象。
这种现象在工程领域中非常常见,因为许多机械设备和结构都需要承受周期性的载荷,例如桥梁、飞机、汽车、船舶等。
因此,了解金属疲劳的原理和机制对于工程设计和安全至关重要。
金属疲劳的原理可以用疲劳寿命曲线来表示。
疲劳寿命曲线是指在一定的载荷幅值下,金属材料所能承受的循环次数与断裂概率之间的关系。
通常情况下,疲劳寿命曲线呈现出一个“S”形,即在循环次数较少时,金属材料的强度较高,但随着循环次数的增加,强度逐渐下降,最终导致断裂。
金属疲劳的机制可以分为两种:微观机制和宏观机制。
微观机制是指金属材料在受到周期性载荷作用下,发生微小的塑性变形和位错运动,导致材料内部出现裂纹和断裂。
宏观机制是指金属材料在受到周期性载荷作用下,发生应力集中和应力变化,导致材料表面出现裂纹和断裂。
微观机制是金属疲劳的基础,它与金属材料的晶体结构和缺陷有关。
金属材料的晶体结构是由原子排列组成的,而缺陷则是指晶体中的空隙、夹杂物、位错等。
当金属材料受到周期性载荷作用时,晶体中的原子会发生微小的位移和变形,导致位错的运动和增殖。
位错是指晶体中的一种缺陷,它是由于晶体中原子排列的不规则性而产生的。
位错的运动和增殖会导致金属材料内部出现裂纹和断裂。
宏观机制是金属疲劳的表现形式,它与金属材料的形状和载荷有关。
金属材料的形状和载荷会影响应力的分布和集中程度。
当金属材料受到周期性载荷作用时,应力会在材料内部和表面产生变化,导致应力集中和应力变化。
应力集中是指应力在材料中的某一点或某一区域集中,导致该点或该区域的应力远高于其他部分。
应力变化是指应力在材料中的某一点或某一区域发生周期性变化,导致该点或该区域的应力不断变化。
应力集中和应力变化会导致金属材料表面出现裂纹和断裂。
金属疲劳的影响因素很多,主要包括载荷幅值、载荷频率、温度、材料性质等。
载荷幅值是指载荷的最大值和最小值之间的差值,它越大,金属材料的疲劳寿命越短。
金属材料的塑性变形与断裂机理
金属材料的塑性变形与断裂机理金属材料是广泛应用于工业和制造领域的重要材料之一。
塑性变形和断裂机理是金属材料力学行为的基本特征,对于理解金属材料的性能和改善其工程应用具有重要意义。
本文将从塑性变形和断裂机理两个方面进行论述,以帮助读者更好地理解金属材料的性质和行为。
一、塑性变形机理1.1 密排层错结构金属材料中晶体的构造对其塑性变形性能具有重要影响。
密排层错结构是金属材料中晶体排列的一种常见结构。
该结构可以使晶体在受力时发生滑移,从而引发材料的塑性变形。
滑移过程中,晶体内的原子相互滑动,使材料发生变形,从而增加其塑性。
1.2 双曲面交错结构双曲面交错结构是另一种常见的金属材料晶体排列方式。
在受力作用下,晶体发生双曲面滑移,从而引起材料的塑性变形。
该结构可以增加晶体滑移的方向,提高材料的塑性。
1.3 变形机制金属材料的塑性变形机制主要包括滑移、孪晶形成和机械孪生等。
滑移是晶体中原子相互滑动引起的变形机制,主要通过滑移面和滑移方向来确定滑移产生的位置。
孪晶形成是在某些条件下晶体内部形成镜像结构,从而产生变形。
机械孪生是晶体中发生变形所产生的一种特殊形态。
二、断裂机理2.1 断裂类型金属材料的断裂类型包括韧性断裂、脆性断裂和疲劳断裂。
韧性断裂是材料发生延性断裂,即在承受一定载荷后,材料仍能继续变形;脆性断裂是材料在承受载荷后突然断裂,变形能力较差;疲劳断裂是材料在长时间重复加载的作用下产生的断裂现象。
2.2 断裂因素金属材料的断裂受到多种因素的影响,主要包括应力、环境和缺陷等。
应力是导致材料发生断裂的最主要因素,当应力超过材料的承受能力时,断裂就会发生。
环境因素如温度、湿度等也会对金属材料的断裂行为产生影响。
此外,材料内部的缺陷如裂纹、夹杂等也会加速材料的断裂。
2.3 断裂表征方法断裂行为的表征对于评估材料的性能具有重要意义。
常见的断裂表征方法包括断口形貌观察、断口分析和断裂韧性测试等。
通过观察断口形貌可以了解材料的断裂模式,进一步深入分析可以推测断裂的原因。
金属的塑性变形机制
压力加工原理 应力与变形 金属的塑性变形机制压力加工中的摩擦与润滑金属加工中各种方法的应力与变形特点金属的塑性与变形抗力 塑性变形对金属组织性能的影响压力加工原理 绪论 自然界金属一般是以氧化物、硫化物、盐类等形式存在 很少以纯金属形式存在 贵金属等 须以冶金、电化学等方式提取出来 加以利用。
提取出来的金属须通过各种方式 加工需要的形状 称为成型。
金属成型方法一般分3类减少质量的方法 机加工、电解腐蚀、冲裁剪切等。
增加质量的方法 焊接铆接、电镀沉积等。
质量不变的方法 锻造、轧制、挤压、拉拔等压力加工原理 绪论 由于金属铸锭组织粗大且不均匀 强度、塑性差 常需要通过压力加工改善内部组织、改变形状 以利后续应用。
金属压力加工就是利用金属的塑性 通过外力克服金属对变形的抵抗 使其产生塑性变形 从而得到各种形状、尺寸和组织性能的产品。
压力加工的过程就是金属产生塑性变形的过程 也可称作塑性加工。
压力加工原理 绪论 金属压力加工的分类 按照加工时 工件受力和变形方式锻造、轧制、挤压、拉伸等按照加工时 工件温度特征热加工 工件在完全再结晶温度以上进行加工 控制温度、变形、冷却 冷加工 工件在回复和再结晶温度以下进行加工 须配合热处理温加工 介于冷、热加工之间的压力加工过程 降低变形抗力、改善塑性 工件在外力作用下 大量金属原子从一个平衡位置转移到另一个平衡位置 宏观上就产生了变形 弹性变形、塑性变形 工件受力分析 外力 加工过程中作用在金属表面的力。
工具对工件施加变形力和约束反力、工件与工具的摩擦力内力 变形中为了平衡外力的作用 在金属内部产生的与外力相平衡的力应力 单位面积上的内力称应力 内力的分类第一种内力 由于受力 金属原子间距发生改变产生的 与外力平衡。
哪个方向有外力 金属内部哪个方向就有第一种内力产生第二种内力 当金属变形不均匀时 金属内部产生的自相平衡的力 变形不均匀、受热不均匀等 应力 四种 基本应力、内应力基本应力 随外力产生而产生 外力去除 基本应力消失第一、二、三种内应力 金属中、晶粒群间、晶粒或相间、晶粒内部由于变形不均匀而产生 残余应力 变形结束后 金属内部仍然残留的应力 三种 对应内应力 后果及预防措施 应力状态、变形状态描述在变形区域内取一个微小的正六面体 建立直角坐标系作用在这个正六面体上的力进行分解 分解为主应力和切应力 作图 当只存在主应力时 称主应力图 共有九种 分三类线应力状态 拉、压 平面应力状态 两向压、两向拉、一拉一压体应力状态 三向压、三向拉、一压两拉、一拉两压 变形区与外端的概念 变形区 在外力作用下正在发生塑性变形的区域称变形区外端 变形区前后 与变形区紧密相连的区域 有的尚未变形 有的已经变形完毕这部分统称外端 也称刚端金属在变形过程中是连续变形的整体 研究变形规律和现象时应注意变形区、外端之间的相互作用工具工具外端外端变形区 金属变形过程与断裂 金属变形过程静力拉伸试验的应力-应变曲线可以看出 金属变形中同时存在弹性变形和塑性变形金属的断裂一般过程 微裂纹的产生、扩展、聚合→裂纹产生、扩展→断裂随变形条件的不同 温度、变形速度、材料状态等 金属的断裂大体上可分为两类脆性断裂 宏观上变形很小就发生断裂 端口平齐 一般有晶体光泽。
HCP多晶体塑性的数值模拟的开题报告
HCP多晶体塑性的数值模拟的开题报告一、背景和意义多晶体塑性是材料力学研究中的一个重要方向。
近年来,随着计算机技术的不断发展和高性能计算机的使用,数值模拟在材料力学领域中得到了广泛应用。
HCP多晶体除具有普通金属晶体塑性具有的各种现象外,还表现出了明显的“屈服延迟”现象和形变相变行为,很难通过实验方法来理解其内在机制。
因此,数值模拟成为了研究HCP多晶体塑性的重要手段。
本文主要研究使用RVE建立的HCP多晶体塑性的数值模拟方法和技术,探索HCP多晶体的塑性变形机理和特性,为材料力学和工程应用提供科学依据。
二、研究内容和方法研究内容:1. 构建HCP多晶体的RVE模型2. 开发HCP多晶体塑性的数值模拟程序3. 采用该程序对HCP多晶体的塑性变形机制和特性进行分析和研究研究方法:1. 利用有限元方法建立HCP多晶体的RVE模型2. 基于动力学有限元方法开发HCP多晶体塑性的有限元程序3. 采用该程序进行数值模拟,分析HCP多晶体的塑性行为和形变行为4. 分析HCP多晶体塑性变形和形变相变机制5. 验证模拟结果与已有实验和理论数据的一致性三、研究计划和进度安排研究计划:1. 研究文献和资料调研,了解HCP多晶体塑性变形机制和已有数值模拟方法;2. 建立HCP多晶体的RVE模型,并分析RVE的尺寸和形态对模拟结果的影响;3. 开发HCP多晶体塑性的有限元程序,并对其进行验证;4. 进行数值模拟,分析HCP多晶体的塑性行为和形变行为;5. 分析模拟结果,探究HCP多晶体塑性变形和形变相变机制;6. 根据研究成果撰写论文,提交相关期刊和会议。
进度安排:第一年:1. 调研相关文献和资料,熟悉HCP多晶体塑性变形机制,掌握已有数值模拟方法;2. 构建HCP多晶体的RVE模型,并分析其尺寸和形态对模拟结果的影响;3. 开发HCP多晶体塑性的有限元程序,并进行初步验证。
第二年:1. 进行HCP多晶体的塑性变形数值模拟,分析其塑性行为和形变行为;2. 分析HCP多晶体塑性变形和形变相变机制;3. 根据研究成果进行论文撰写和修改。
HCP金属如何通过消除织构来提高塑性、方法及原因
当晶体的取向集中在某些或某一方向附近时,称为择优取向,一般把具有择优取向的多晶体组织称为织构。
热变形时,金属材料内部一般会发生两种微观过程:(1)以位错为主的塑性变形,此时金属基体缺陷密度增大;(2)以回复、形核和晶粒长大为主的动态再结晶,此时金属基体缺陷密度减小。
这两个过程在变形时同时发生或者交替发生,使得实际的微观过程不容易研究。
概括地讲,金属发生塑性变形时,晶体内部滑移和孪生使晶粒发生转动,从而使金属产生变形织构,而动态再结晶的发生会使晶体内出现再结晶织构,塑性变形和动态再结晶同时进行或者交替进行导致两种织构都没有充分发展,因而通常在热变形后产生很弱的织构。
另外,热变形会受到变形温度、变形程度、变形速率等多种因素影响,此时塑性变形和动态再结晶或多或少地受到影响而变得容易发生或受到阻碍,从而导致了织构的强弱不同,种类也不一样。
(1)变形温度变形温度会影响镁合金织构类型和成分。
高温下,棱柱面滑移和锥面滑移被激活,不同滑移系间的临界剪切应力的差值变小,滑移系对塑性应变的贡献改变,使镁合金的织构成分变得复杂,织构的强弱也有改变。
通过研究发现,AZ31镁合金的轧制样品中的基面织构会随着变形温度升高而变弱,在轧制温度很高时,基面织构会消失,此时有新的织构生成,新织构是高温下基面滑移、非基面滑移、孪生以及晶粒异常长大共同造成的结果。
(2)变形速率变形速率对织构的影响一般是通过影响变形温度变化进而引起织构的改变。
变形温度较低时,提高变形速率,温度会升高;变形温度较高时,变形速率改变会对动态再结晶、位错滑移、晶粒转动等过程产生影响,使得塑性变形模式改变,因而造成织构的类型或者强弱有所不同。
研究结果表明,变形速率变大时,基面织构强度会减弱,而变形量变大时,基面织构强度会增强。
(3)变形量镁合金中变形量的改变一般会使织构的锋锐程度发生改变。
例如,镁合金在轧制时,若经过l道次轧制,会形成明显的基面织构,若经过2道次轧制,峰值则会变小。
第5节-HCP疲劳
材料的疲劳与断裂第6 讲HCP晶体循环变形2007年4月18日六方金属钛介绍六方金属钛的发现与工业应用1790年:英国矿物学爱好者Gregor首次发现钛的氧化物;1795年:德国科学家Klaproth认定矿物金红石是一种新氧化物,将其命名为Titanium,即大力神;1910年:Hunter使用钠还原高纯TiCl4制取出较高纯度钛;1925年:Van Arkel和De Boer用TiI4在钨丝上分解的方法,制备出完全可延性的金属钛;1938年:Kroll发明了镁还原法,发展了钛的制取技术;1948年:开始将该法应用到工业上生产海绵钛,从此钛在全球陆续得到广泛应用。
六方金属钛的优异性能1、比强度高:300°C时,钛的比强度是合金钢的1.4-1.7倍,铝合金的1.3倍,镁合金的1.5倍。
2、耐腐蚀能力强:在室温下,钛合金在盐酸、硫酸、硝酸、氢氧化钠、氯化铁、氯化钠、硫化氢等溶液中都有优异的耐蚀性,并且耐海水能力尤其强。
3、耐冷和耐热性好;4、生物相容性好;5、可以合成多种功能合金:储氢合金、形状记忆合金、超弹性合金等。
六方金属钛的晶体结构基面滑移一级柱面滑移一级锥面滑移二级锥面滑移可见钛在六方金属晶体中的孪生系统也是最复杂的。
K1:第一不变畸变面K2:第二不变畸变面η1:孪生方向η2:K2/切变面交线六方金属钛的变形机制与性能由于钛具有众多的滑移系统如:基面滑移、一级柱面滑移、一级锥面滑移、二级锥面滑移等,以及比较多的拉伸和压缩孪生系统,因此无论在拉伸还是在压缩载荷下钛都具有非常好的塑性变形能力。
六方金属钛的疲劳研究以前对钛的疲劳研究都只是针对多晶体,而对纯钛单晶体和双晶体疲劳的研究几乎没有文献报道。
以下主要介绍西安交大谭晓礼攻读博士期间对高纯钛单晶体、双晶体、粗晶体和多晶体的主要研究结果。
钛单晶体、双晶体与多晶体的循环变形钛晶体的疲劳研究内容介绍1、[0001]取向钛单晶体的循环变形行为2、随机取向钛单晶体的循环变形行为3、高纯钛双晶体的循环变形行为4、高纯钛粗晶体的循环变形行为5、工业纯钛多晶体的循环变形行为六方金属钛单晶体的制备应变退火法:通过对多晶体样品施加一临界应变,然后在高真空管中长期退火,使晶界发生界面迁移,逐渐长出大尺度单晶体。