PID调节控制电机速度控制中文讲解(让初学者快速了解PID控制方式)
PID控制通俗讲解
在控制理论中,PID是一种在很早就成熟起来的经典控制方法之一,并且在控制理论日新月异的高速发展的情况下,仍能在工业实际应用中,占据垄断的地位,的确是很值得思考。
在Quadlator I和Quadlator II中,撇开上层控制算法不说,在电机控制这一局部,都使用了PID控制。
PID控制是任何学习自动控制理论课程的必讲内容,因此这些介绍也本着这样的原则:对于熟悉的读者,这些内容可以略去不管;对于已经忘记的差不多得读者,这些可以唤起你当初大学时得回忆;对于初学的爱好者,这个是比课本更加简略的介绍,不涉及太多的理论推导,而更重视实际效果和应用。
所以将主要介绍以下内容:∙PID的基本概念∙怎么使用PID控制,尤其在控制电机时如何实现PID是比例,积分,微分的首字母缩写。
为了不一上来就进行复杂的理论推导。
这里用直观朴素的“问题-解答 ”方式加以介绍。
假设你要在房间的墙上张贴一幅年画,你站在椅子上,你的审美情趣严格的妻子站在远处告诉你画是否摆正了。
她会说:“太偏了,向左 ”,于是你会把画向左移动很大一截;然后你妻子告诉你:过了,向右一点,于是你把画向右移动,但是这次不是很大一截,而是幅度小一些的移动;这时你妻子说:过了一点点,稍微向左一点,这时你会小心谨慎的只向左移动很小的一段距离。
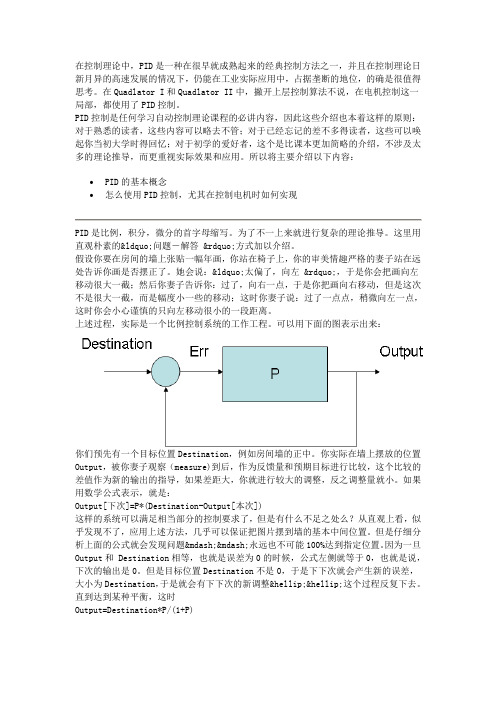
上述过程,实际是一个比例控制系统的工作工程。
可以用下面的图表示出来:你们预先有一个目标位置Destination,例如房间墙的正中。
你实际在墙上摆放的位置Output,被你妻子观察(measure)到后,作为反馈量和预期目标进行比较,这个比较的差值作为新的输出的指导,如果差距大,你就进行较大的调整,反之调整量就小。
如果用数学公式表示,就是:Output[下次]=P*(Destination-Output[本次])这样的系统可以满足相当部分的控制要求了,但是有什么不足之处么?从直观上看,似乎发现不了,应用上述方法,几乎可以保证把图片摆到墙的基本中间位置。
(完整版)PID控制详解

PID控制原理和特点工程实际中,应用最为广泛调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID 控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要技术之一.当被控对象结构和参数不能完全掌握,或不到精确数学模型时,控制理论其它技术难以采用时,系统控制器结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便.即当我们不完全了解一个系统和被控对象﹐或不能有效测量手段来获系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制.PID控制器就是系统误差,利用比例、积分、微分计算出控制量进行控制。
1、比例控制(P):比例控制是最常用的控制手段之一,比方说我们控制一个加热器的恒温100度,当开始加热时,离目标温度相差比较远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数e(t) = SP – y(t)-u(t) = e(t)*PSP——设定值e(t)——误差值y(t)——反馈值u(t)——输出值P——比例系数滞后性不是很大的控制对象使用比例控制方式就可以满足控制要求,但很多被控对象中因为有滞后性。
也就是如果设定温度是200度,当采用比例方式控制时,如果P选择比较大,则会出现当温度达到200度输出为0后,温度仍然会止不住的向上爬升,比方说升至230度,当温度超过200度太多后又开始回落,尽管这时输出开始出力加热,但温度仍然会向下跌落一定的温度才会止跌回升,比方说降至170度,最后整个系统会稳定在一定的范围内进行振荡。
如果这个振荡的幅度是允许的比方说家用电器的控制,那则可以选用比例控制2、比例积分控制(PI):积分的存在是针对比例控制要不就是有差值要不就是振荡的这种特点提出的改进,它常与比例一块进行控制,也就是PI控制。
其公式有很多种,但大多差别不大,标准公式如下:u(t) = Kp*e(t) + Ki∑e(t) +u0u(t)—-输出Kp--比例放大系数Ki——积分放大系数e(t)——误差u0——控制量基准值(基础偏差)大家可以看到积分项是一个历史误差的累积值,如果光用比例控制时,我们知道要不就是达不到设定值要不就是振荡,在使用了积分项后就可以解决达不到设定值的静态误差问题,比方说一个控制中使用了PI控制后,如果存在静态误差,输出始终达不到设定值,这时积分项的误差累积值会越来越大,这个累积值乘上Ki 后会在输出的比重中越占越多,使输出u(t)越来越大,最终达到消除静态误差的目的PI两个结合使用的情况下,我们的调整方式如下:1、先将I值设为0,将P值放至比较大,当出现稳定振荡时,我们再减小P值直到P值不振荡或者振荡很小为止(术语叫临界振荡状态),在有些情况下,我们还可以在些P值的基础上再加大一点。
PID控制器对电机速度的控制
实验PID控制器的设计一、实验目地1.了解和观测PID控制规律的作用,对系统动态特性和稳态特性及稳定性的影响;2.验证调节器各参数(Kc,Ti,Td), 在调节系统中的功能和对调节质量的影响;3.掌握用Simulink来构造控制系统模型及参数的设置;4.掌握计算机控制仿真结果的方法。
二、实验原理PID控制器(比例-积分-微分控制器),由比例单元、积分单元和微分单元组成。
通过Kp,Ki和Kd三个参数的设定。
PID控制器主要适用于基本线性和动态特性不随时间变化的系统。
PID 控制器是一个在工业控制应用中常见的反馈回路部件。
这个控制器把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。
和其他简单的控制运算不同,PID控制器可以根据历史数据和差别的出现率来调整输入值,这样可以使系统更加准确,更加稳定。
可以通过数学的方法证明,在其他控制方法导致系统有稳定误差或过程反复的情况下,一个PID反馈回路却可以保持系统的稳定。
PID是以它的三种纠正算法而命名的。
这三种算法都是用加法调整被控制的数值。
而实际上这些加法运算大部分变成了减法运算因为被加数总是负值。
这三种算法是:比例- 来控制当前,误差值和一个负常数P(表示比例)相乘,然后和预定的值相加。
P只是在控制器的输出和系统的误差成比例的时候成立。
比如说,一个电热器的控制器的比例尺范围是10°C,它的预定值是20°C。
那么它在10°C的时候会输出100%,在15°C的时候会输出50%,在19°C的时候输出10%,注意在误差是0的时候,控制器的输出也是0。
积分- 来控制过去,误差值是过去一段时间的误差和,然后乘以一个负常数I,然后和预定值相加。
I从过去的平均误差值来找到系统的输出结果和预定值的平均误差。
一个简单的比例系统会振荡,会在预定值的附近来回变化,因为系统无法消除多余的纠正。
详细讲解PID控制

详细讲解PID控制PID的数学模型在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在很多控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。
经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的。
PID算法的一般形式:PID算法通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。
这里我们规定(在t时刻):1.输入量为2.输出量为3.偏差量为PID算法的数字离散化假设采样间隔为T,则在第K个T时刻:偏差=积分环节用加和的形式表示,即微分环节用斜率的形式表示,即PID算法离散化后的式子:则可表示成为:其中式中:比例参数:控制器的输出与输入偏差值成比例关系。
系统一旦出现偏差,比例调节立即产生调节作用以减少偏差。
特点:过程简单快速、比例作用大,可以加快调节,减小误差;但是使系统稳定性下降,造成不稳定,有余差。
积分参数:积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差。
微分参数:微分信号则反应了偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的快速性。
PID的基本离散表示形式如上。
目前的这种表述形式属于位置型PID,另外一种表述方式为增量式PID,由上述表达式可以轻易得到:那么:上式就是离散化PID的增量式表示方式,由公式可以看出,增量式的表达结果和最近三次的偏差有关,这样就大大提高了系统的稳定性。
需要注意的是最终的输出结果应该为:输出量 =+ 增量调节值目的PID 的重要性应该无需多说了,这个控制领域的应用最广泛的算法了.本篇文章的目的是希望通过一个例子展示算法过程,并解释以下概念:(1)简单描述何为PID, 为何需要PID,PID 能达到什么作用。
PID调节的详细说明

1. PID调试步骤没有一种控制算法比PID调节规律更有效、更方便的了。
现在一些时髦点的调节器基本源自PID。
甚至可以这样说:PID调节器是其它控制调节算法的吗。
为什么PID应用如此广泛、又长久不衰?因为PID解决了自动控制理论所要解决的最基本问题,既系统的稳定性、快速性和准确性。
调节PID的参数,可实现在系统稳定的前提下,兼顾系统的带载能力和抗扰能力,同时,在PID调节器中引入积分项,系统增加了一个零积点,使之成为一阶或一阶以上的系统,这样系统阶跃响应的稳态误差就为零。
由于自动控制系统被控对象的千差万别,PID的参数也必须随之变化,以满足系统的性能要求。
这就给使用者带来相当的麻烦,特别是对初学者。
下面简单介绍一下调试PID参数的一般步骤:1.负反馈自动控制理论也被称为负反馈控制理论。
首先检查系统接线,确定系统的反馈为负反馈。
例如电机调速系统,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。
其余系统同此方法。
2.PID调试一般原则 a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。
3.一般步骤 a.确定比例增益P 确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。
输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。
比例增益P调试完成。
b.确定积分时间常数Ti 比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。
记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。
PID调节控制做电机速度控制

2.4 参数调整规则的探索 ................................................................................................................. 6 2.5 自校正PID控制器 ...................................................................................................................... 7 3 软件说明 ............................................................................................................................................. 8 3.1 软件说明 ..................................................................................................................................... 8 3.2 档案构成 ..................................................................................................................................... 8 3.3 DMC界面 .................................................................................................................................... 8 3.4 子程序说明 ................................................................................................................................. 9 4 程序范例 ........................................................................................................................................... 16 4.1 DEMO程序 ............................................................................................................................... 16 4.2 程序流程与说明 ....................................................................................................................... 19 4.3 中断子流程与说明 ................................................................................................................... 20 5 MCU使用资源 ................................................................................................................................. 21 5.1 MCU硬件使用资源说明 .......................................................................................................... 21 6 实验测试 ........................................................................................................................................... 22 6.1 响应曲线 ................................................................................................................................... 22 7 参考文献 ........................................................................................................................................... 26
PID直流电机调速讲解1
PI 组合 消除了误差 带来了超调
Velocity
Time
5
of
26
PID是什么?
D--微分控制部分
所谓的微分就是对变量求导, 意思就是一个量的变化率.其 微分部分就是能够将变量变 化率放入计算中.这个量在编 程中其实就是求上次偏差和 这次偏差的差.
PID 黄金组合 加快迚入稳态 减少超调
绕不开的理论公式
上面介绍的公式,叫做位置PID,也就是每次都使用整个系统的状态。 可以理解为:偏差使用的是所有的全量偏差。 还有一种算法是增量式PID。 摘录网上的话:“位置式PID算法每次输出不整个过去状态有关,计算 式中要用到过去误差的累加值,因此,容易产生较大的累积计算误差。 而增量式PID只需计算增量,计算误差戒精度丌足时对控制量的计算影 响较小。” 上一次的输出为u(k-1),这次的输出为u(k) ,变化量为^u(k)
5
of
26
实际如何下手
硬件准备: 1.N20直流电机,配有1:145的金属变速箱。电机必须带测速。 2.Aduino nano控制板,主控芯片atmel328p。 3.实现电机控制的H桥电路板,带pwm输入。 4.供电电池。
软件准备: 1.Arduino IDE开发环境。 2.串口猎人,用于收集数据,实时绘制可视化图像。
5
of
26
实际如何下手 代码实现
速度测定: 程序可以通过定时器来计数,利用单片机上的引脚变化中断实现。 问题是这个采样时间怎么取? 这里针对我买的电机,测速是放在转轴上未减速前的,采样周期可以设短为30ms。 电机每圈有12个ticks,就设为15ms测速一次,每测2次求平均值,作为当前速度值。 有了采样周期,就可以得到:输出量。
PID的调节方法

PID的调节方法打开今日头条,查看更多精彩图片1. PID调试步骤没有一种控制算法比PID调节规律更有效、更方便的了。
现在一些时髦点的调节器基本源自PID。
甚至可以这样说:PID调节器是其它控制调节算法的吗。
为什么PID应用如此广泛、又长久不衰?因为PID解决了自动控制理论所要解决的最基本问题,既系统的稳定性、快速性和准确性。
调节PID的参数,可实现在系统稳定的前提下,兼顾系统的带载能力和抗扰能力,同时,在PID调节器中引入积分项,系统增加了一个零积点,使之成为一阶或一阶以上的系统,这样系统阶跃响应的稳态误差就为零。
由于自动控制系统被控对象的千差万别,PID的参数也必须随之变化,以满足系统的性能要求。
这就给使用者带来相当的麻烦,特别是对初学者。
下面简单介绍一下调试PID参数的一般步骤:1.负反馈自动控制理论也被称为负反馈控制理论。
首先检查系统接线,确定系统的反馈为负反馈。
例如电机调速系统,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。
其余系统同此方法。
2.PID调试一般原则a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数T d。
3.一般步骤a.确定比例增益P确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。
输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。
比例增益P调试完成。
b.确定积分时间常数Ti比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。
PID通俗易懂的讲解

很多同学都不清楚PID是个什么东西,因为很多不是自动化的学生。
他们开口就要资料,要程序。
这是明显的学习方法不对,起码,首先,你要理解PID是个什么东西。
本文以通俗的理解,以小车纵向控制举例说明PID的一些理解。
首先,为什么要做PID?由于外界原因,小车的实际速度有时不稳定,这是其一,要让小车以最快的时间达达到既定的目标速度,这是其二。
速度控制系统是闭环,才能满足整个系统的稳定要求,必竟速度是系统参数之一,这是其三.小车调速肯定不是线性的,外界因素那么多,没人能证明是线性的。
如果是线性的,直接用P就可以了。
比如在P WM=60%时,速度是2M/S,那么你要它3M/S,就把PW M提高到90%。
因为90/60=3/2,这样一来太完美了。
完美是不可能的。
那么不是线性的,要怎么怎么控制PW M使速度达到即定的速度呢?即要快,又要准,又要狠。
(即快准狠)系统这个速度的调整过程就必须通过某个算法调整,一般PID就是这个所用的算法。
可能你会想到,如果通过编码器测得现在的速度是2.0m/s,要达到2.3m/s的速度,那么我把pwm增大一点不就行了吗?是的,增大pwm多少呢?必须要通过算法,因为PWM和速度是个什么关系,对于整个系统来说,谁也不知道。
要一点一点的试,加个1%,不够,再加1%还是不够,那么第三次你还会加1%吗?很有可能就加2%了。
通过PID三个参数得到一个表达式:△PW M=a *△V1+b *△V2+c *△V3,ab c是通过PID的那个长长的公式展开,然后约简后的数字,△V1 ,△V2 ,△V3 此前第一次调整后的速度差 ,第二次调整后的速度差,第三次。
PID控制算法通俗讲解(转)
抛弃公式,从原理上真正理解PID控制PID控制应该算是应用非常广泛的控制算法了。
小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。
这里我们从原理上来理解PID控制。
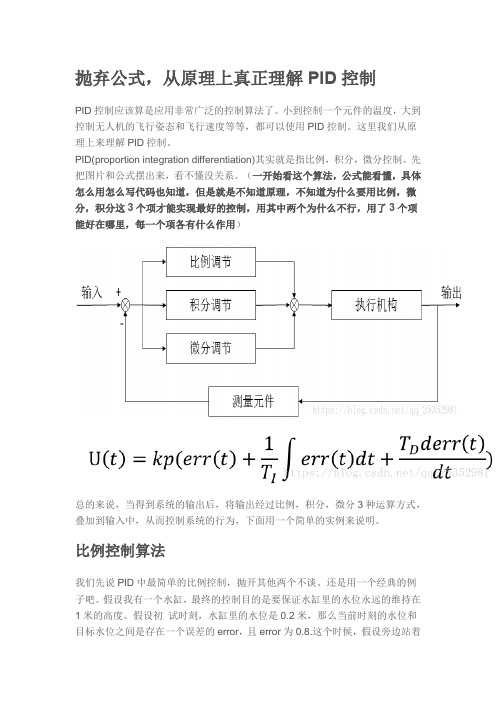
PID(proportion integration differentiation)其实就是指比例,积分,微分控制。
先把图片和公式摆出来,看不懂没关系。
(一开始看这个算法,公式能看懂,具体怎么用怎么写代码也知道,但是就是不知道原理,不知道为什么要用比例,微分,积分这3个项才能实现最好的控制,用其中两个为什么不行,用了3个项能好在哪里,每一个项各有什么作用)总的来说,当得到系统的输出后,将输出经过比例,积分,微分3种运算方式,叠加到输入中,从而控制系统的行为,下面用一个简单的实例来说明。
比例控制算法我们先说PID中最简单的比例控制,抛开其他两个不谈。
还是用一个经典的例子吧。
假设我有一个水缸,最终的控制目的是要保证水缸里的水位永远的维持在1米的高度。
假设初试时刻,水缸里的水位是0.2米,那么当前时刻的水位和目标水位之间是存在一个误差的error,且error为0.8.这个时候,假设旁边站着一个人,这个人通过往缸里加水的方式来控制水位。
如果单纯的用比例控制算法,就是指加入的水量u和误差error是成正比的。
即u=kp*error假设kp取0.5,那么t=1时(表示第1次加水,也就是第一次对系统施加控制),那么u=0.5*0.8=0.4,所以这一次加入的水量会使水位在0.2的基础上上升0.4,达到0.6.接着,t=2时刻(第2次施加控制),当前水位是0.6,所以error是0.4。
u=0.5*0.4=0.2,会使水位再次上升0.2,达到0.8.如此这么循环下去,就是比例控制算法的运行方法。
可以看到,最终水位会达到我们需要的1米。
但是,单单的比例控制存在着一些不足,其中一点就是–稳态误差!(我也是看了很多,并且想了好久才想通什么是稳态误差以及为什么有稳态误差)。
初学者的PID调速
初学者的PID调速背景:偶然购买了智能小车配件,使用现在大热的arduino控制板,实现了wifi的小车运动。
但是遇到了走不直,控不住的问题。
上网google后,发现里面还有很大的学问,直到发现了一个名为PID的控制方法,可以控制电机转速。
只有实现了PID调速,才有基础让小车走直线。
硬件准备:N20直流电机,配有1:145的金属变速箱。
电机必须带测速。
Aduino nano控制板,主控芯片atmel328p。
实现电机控制的H桥电路板,带pwm输入。
供电电池。
软件准备:Arduino IDE开发环境。
串口猎人,收集数据,绘制可视化图像。
目的就是控制电机转速,但是如何入手是个门槛。
通过疯狂google,网上的偏重理论研究的很多,也有很多的学生毕业设计论文,但是都是说的不仔细不透彻。
我本身工作多年,数学基础,自动控制理论也比较薄弱,看了也是云里雾里。
正在发愁之际,点入丁老师的“嵌入之梦”网站。
里面的一篇PID调速文章使用通俗易懂的语言介绍让我非常兴奋,给我一个不错的起点,总算是找到门了!还是要先有个大概的理论。
PID指的是(比例-积分-微分)控制器。
要控制就要涉及到三个量:设定值(控制目的)、被调量(控制什么)、输出量(控制结果)。
对应到直流电机上就是:设定值:希望(给定)电机输出的转速被调量:PWM占空比输出量:实际电机输出的转速实现自动控制保持速度恒定,有一个必不可少的东西,反馈。
只有有了反馈才能知道如何调整被调量。
假设我是控制小车的程序,我只有看到当前时刻的速度才能采取动作,是调快点还是调慢点。
电机上体现速度的数字量是单位时间内的电平改变的次数(ticks)。
我设置的是引脚变化触发计数,有改变就计数。
因此,速度 = ticks。
对应的量就变为:设定值:希望的单位时间内ticks被调量:PWM占空比输出量:实际单位时间内ticks下面问题来了,如何测定ticks。
程序可以通过定时器来计数,问题是这个采样时间怎么取?参考丁老师的文章“因为 PID 控制的基础是以周期 T 测量,计算出偏差后修正输出。
PID控制详解.pdf
PID控制详解一、PID控制简介PID( Proportional Integral Derivative)控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制,尤其适用于可建立精确数学模型的确定性控制系统。
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节,它实际上是一种算法。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
从信号变换的角度而言,超前校正、滞后校正、滞后-超前校正可以总结为比例、积分、微分三种运算及其组合。
PID调节器的适用范围:PID调节控制是一个传统控制方法,它适用于温度、压力、流量、液位等几乎所有现场,不同的现场,仅仅是PID参数应设置不同,只要参数设置得当均可以达到很好的效果。
均可以达到0.1%,甚至更高的控制要求。
PID控制的不足1. 在实际工业生产过程往往具有非线性、时变不确定,难以建立精确的数学模型,常规的PID控制器不能达到理想的控制效果;2. 在实际生产现场中,由于受到参数整定方法烦杂的困扰,常规PID控制器参数往往整定不良、效果欠佳,对运行工况的适应能力很差。
二、PID控制器各校正环节任何闭环控制系统的首要任务是要稳(稳定)、快(快速)、准(准确)的响应命令。
PID调整的主要工作就是如何实现这一任务。
增大比例系数P将加快系统的响应,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现,过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。
(完整版)PID控制详解

PID控制原理和特点工程实际中,应用最为广泛调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要技术之一。
当被控对象结构和参数不能完全掌握,或不到精确数学模型时,控制理论其它技术难以采用时,系统控制器结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象﹐或不能有效测量手段来获系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是系统误差,利用比例、积分、微分计算出控制量进行控制。
1、比例控制(P):比例控制是最常用的控制手段之一,比方说我们控制一个加热器的恒温100度,当开始加热时,离目标温度相差比较远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数e(t) = SP – y(t)-u(t) = e(t)*PSP——设定值e(t)——误差值y(t)——反馈值u(t)——输出值P——比例系数滞后性不是很大的控制对象使用比例控制方式就可以满足控制要求,但很多被控对象中因为有滞后性。
也就是如果设定温度是200度,当采用比例方式控制时,如果P选择比较大,则会出现当温度达到200度输出为0后,温度仍然会止不住的向上爬升,比方说升至230度,当温度超过200度太多后又开始回落,尽管这时输出开始出力加热,但温度仍然会向下跌落一定的温度才会止跌回升,比方说降至170度,最后整个系统会稳定在一定的范围内进行振荡。
如果这个振荡的幅度是允许的比方说家用电器的控制,那则可以选用比例控制2、比例积分控制(PI):积分的存在是针对比例控制要不就是有差值要不就是振荡的这种特点提出的改进,它常与比例一块进行控制,也就是PI控制。
其公式有很多种,但大多差别不大,标准公式如下:u(t) = Kp*e(t) + Ki∑e(t) +u0u(t)——输出Kp——比例放大系数Ki——积分放大系数e(t)——误差u0——控制量基准值(基础偏差)大家可以看到积分项是一个历史误差的累积值,如果光用比例控制时,我们知道要不就是达不到设定值要不就是振荡,在使用了积分项后就可以解决达不到设定值的静态误差问题,比方说一个控制中使用了PI控制后,如果存在静态误差,输出始终达不到设定值,这时积分项的误差累积值会越来越大,这个累积值乘上Ki后会在输出的比重中越占越多,使输出u(t)越来越大,最终达到消除静态误差的目的PI两个结合使用的情况下,我们的调整方式如下:1、先将I值设为0,将P值放至比较大,当出现稳定振荡时,我们再减小P值直到P值不振荡或者振荡很小为止(术语叫临界振荡状态),在有些情况下,我们还可以在些P值的基础上再加大一点。
PID步进电机的调速
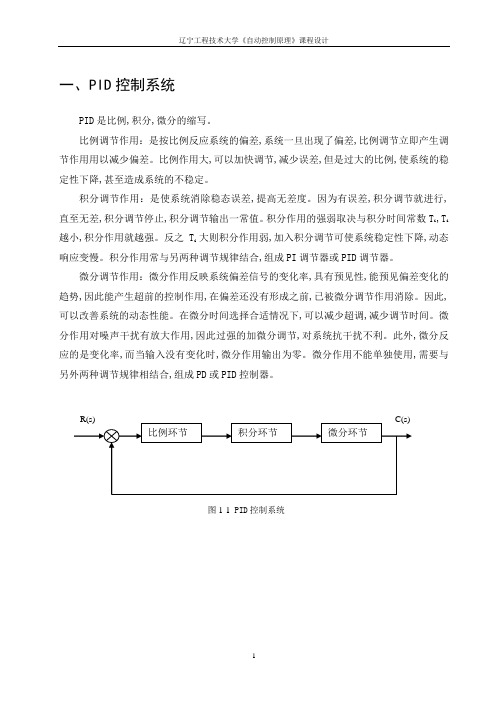
一、PID控制系统PID是比例,积分,微分的缩写。
比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:是使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数Ti ,Ti越小,积分作用就越强。
反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
图1-1 PID控制系统二、二阶系统数学模型二阶系统方框图如下图所示二阶系统闭环传递函数的标准形式2222)()()(n n n s s s R s C s ωζωω++==Φ (2-1)得出自然频率(或无阻尼振荡频率)Mn T K=ω (2-2) 阻尼比KT M 21=ζ (2-3)令式(2-1)的分母多项式为零,得二阶系统的特征方程0222=++n n s ωζω (2-4)其两个根(闭环极点)为1221-±-=ζωζωn n 、s (2-5)显然,二阶系统的时间响应取决于ζ和n ω这两个参数。
应当指出对于结构和功用不同的二阶系统,ζ和n ω的物理含意是不同的。
图2-2 标准形式二阶系统结构图三、PID 调速系统数学模型PID 控制系统是一种线性控制系统。
PID步进电机的调速
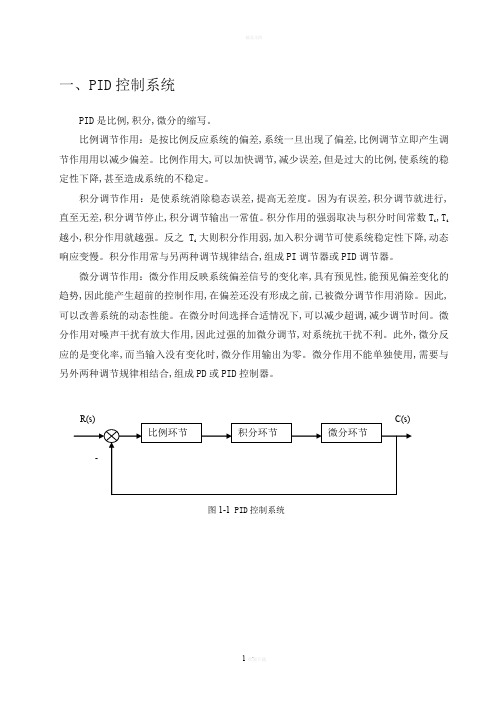
一、PID控制系统PID是比例,积分,微分的缩写。
比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:是使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数Ti ,Ti越小,积分作用就越强。
反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
比例环节积分环节微分环节-R(s)C(s)图1-1 PID控制系统二、二阶系统数学模型二阶系统方框图如下图所示二阶系统闭环传递函数的标准形式2222)()()(n n n s s s R s C s ωζωω++==Φ (2-1)得出自然频率(或无阻尼振荡频率)Mn T K=ω (2-2) 阻尼比KT M 21=ζ (2-3)令式(2-1)的分母多项式为零,得二阶系统的特征方程0222=++n n s ωζω (2-4)其两个根(闭环极点)为1221-±-=ζωζωn n 、s (2-5)显然,二阶系统的时间响应取决于ζ和n ω这两个参数。
应当指出对于结构和功用不同的二阶系统,ζ和n ω的物理含意是不同的。
PID调节控制(电机速度控制).
PID 调节控制做电机速度控制 V1.1 – Jan 23, 200619, Innovation First Road • Science Park • Hsin-Chu • Taiwan 300 • R.O.C. Tel: 886-3-578-6005Fax:886-3-578-4418E-mail:***************.cnPID 调节控制做电机速度控制版权声明凌阳科技股份有限公司保留对此文件修改之权利且不另行通知。
凌阳科技股份有限公司所提供之信息相信为正确且可靠之信息,但并不保证本文件中绝无错误。
请于向凌阳科技股份有限公司提出订单前,自行确定所使用之相关技术文件及规格为最新之版本。
若因贵公司使用本公司之文件或产品,而涉及第三人之专利或著作权等智能财产权之应用及配合时,则应由贵公司负责取得同意及授权,本公司仅单纯贩售产品,上述关于同意及授权,非属本公司应为保证之责任。
又未经凌阳科技股份有限公司之正式书面许可,本公司之所有产品不得使用于医疗器材,维持生命系统及飞航等相关设备。
目录1模拟PID 控制 (1)1.1 模拟PID 控制原理 (1)2数字PID 控制 (3)2.1 位置式PID 算法.......................................................................................................................... 3 2.2 增量式PID 算法..........................................................................................................................4 2.3 控制器参数整定 (4)2.3.1 凑试法........................................................................................................................... 5 2.3.2 临界比例法................................................................................................................... 5 2.3.3 经验法 (5)2.3.4 采样周期的选择...........................................................................................................6 2.4 参数调整规则的探索................................................................................................................. 6 2.5 自校正PID 控制器. (7)3软件说明.............................................................................................................................................8 3.1 软件说明 (8)3.2 档案构成 (8)3.3 DMC 界面 (8)3.4 子程序说明 (9)4程序范例...........................................................................................................................................16 4.1 DEMO 程序............................................................................................................................... 16 4.2 程序流程与说明....................................................................................................................... 19 4.3 中断子流程与说明. (20)5MCU 使用资源................................................................................................................................. 21 5.1 MCU 硬件使用资源说明. (21)6实验测试...........................................................................................................................................22 6.1 响应曲线 (22)7参考文献...........................................................................................................................................26修订记录日期版本编写及修订者初版错误校正编写及修订说明4、微分作用可改善系统的动态特性,阻止偏差的变化,有助于减小超调量,消除振荡,缩短调节时间t s ,允许加大 Kp ,使系统稳态误差减小,提高控制精度,达到满意的控制效果。