软体机器人综述
软体机器人研究综述_何斌

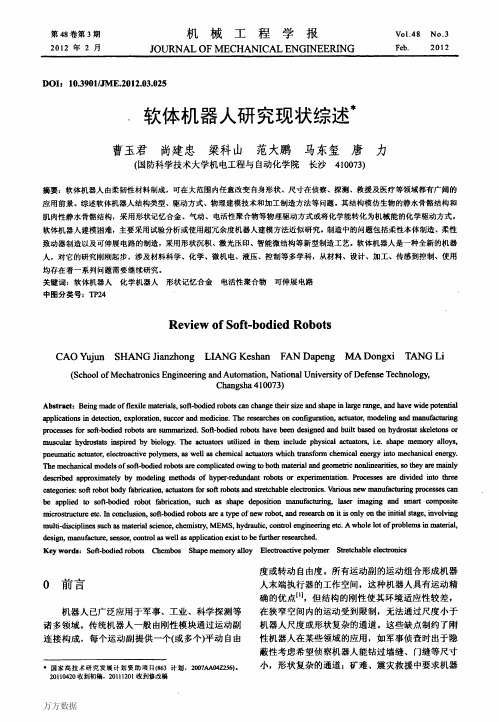
蠕虫由表皮、肌肉、体液、神 经 系 统 组 成.身 体 呈 管状、体积 恒 定,是 典 型 的 流 体 静 力 骨 骼 结 构 . [26-27] 这种生物的 运 动 由 环 肌 和 纵 肌 的 颉 抗 形 成.如 图 1 所示,纵肌收 缩 增 加 直 径,环 肌 收 缩 减 小 直 径,通 过 各节 段 肌 肉 收 缩 和 扩 张 产 生 行 进 波 向 前 移 动,与 肠 蠕动过程相似.基于流体静力骨骼原理,文 献[28]设 计了由空气阀、金属弹簧、热塑性轴承 组 成 的 压 力 驱 动器.文献[29]采用印制电路板做支撑、嵌 入 硅 树 脂 和 介 电 弹 性 体 ,实 现 了 类 蠕 虫 运 动 .
DOI:10.11908/j.issn.0253-374x.2014.10.021
软体机器人研究综述
何 斌,王志鹏,唐海峰
(同济大学 电子信息与工程学院,上海 201804)
摘要:机器人 技 术 广 泛 应 用 于 工 业 生 产 、医 疗 服 务、勘 探 勘 测、生物工程、救灾救援等领域.传 统 机 器 人 大 都 由 刚 性 机 构 组成,存在环境适 应 能 力 低 的 缺 点.软 体 机 器 人 是 一 类 新 型 仿生连续体机器 人,可 以 任 意 改 变 自 身 形 状,在 非 结 构 化 环 境中应用前景广 阔.综 述 了 软 体 机 器 人 的 仿 生 机 理 、驱 动 方 式、建模与控制方 法 等 关 键 问 题,并 通 过 分 析 和 梳 理 软 体 机 器人技术发展中的瓶颈问题及 可 行 解 决 方 案,探 讨 了 软 体 机 器人技术的发展趋势.
软体机器人

任务
03
下面我们将从几个方面详细介绍软 体机器人的特点和应用
1
材料
软体机器人的主要材料 是柔软、可变形的聚合 物或橡胶
这些材料可以承受各种 形状和压力,同时具有 很高的弹性和耐用性
这种材料可以模拟生物 体的肌肉和神经系统的 运动和传感功能,使软 体机器人具有很高的灵 活性和适应性
2
结构
软体机器人的结构通常是 由多个层组成的,包括基 础层、驱动层、传感层等
XXXXX
软体机器人
1 材料 3 应用 5 结论 7 微型生物机器人 9 柔性机器人
2 结构 4 未来发展 6 人机交互 8 环境适应型机器人
软体机器人是一种新兴的机器人技
01
术,它使用柔软、可变形的材料来
模拟生物体的运动和适应能力
这种机器人具有很高的柔韧性和可
02
塑性,可以适应各种复杂的环境和
这些层之间可以通过多种 方式相互连接,例如热压 接、熔融接等
12
+
34
其中,驱动层负责机器人 的运动和操作,传感层则 负责机器人的感知和反馈
这种结构使得软体机器人 具有很高的可塑性和可重 构性,可以根据任务的不 同进行快速的围非常广泛,包括医疗、 救援、服务等领域
➢ 总之,软体机器人在未来 具有广阔的发展前景和应 用潜力。随着技术的不断 进步和应用场景的不断扩 展,我们有理由相信软体 机器人的未来将更加美好
感谢您的观看
Thanks
8
环境适应型机器人
软体机器人的适应性和灵活 性使得它能够在极端环境下 进行工作
例如,在深海、高山、太空 等环境下,软体机器人可以 适应各种复杂的地形和压力, 完成各种任务
9
柔性机器人
软体机器人研究现状综述
而是由表皮、肌肉、体液、神经系统组成。其典型 结构是肌肉构成封闭腔,内部充满体液,形成静水 骨骼结构lI’z¨。体液限制了体积的变化,所以当肌 肉在某一方向收缩时,必然在其他方向伸长,以保 持体积不变。为提高肌肉强度,肌肉之间的连接处
Ch姐gsha 410073)
Ab咖_ct:Being
p∞lces9豁fbr
made of nexile
n嫩rials,∞ft-bodicd robo伍c柚ch柚ge山eir size缸d shapc
and
in
印plic撕o∞in d葺=tec如n,expl0伯矗on,slKcor
soft捌ied
medicm.The佗search豁on cc柚gt枷on,孤蜘ator’modeling蛆d蚴谢敏=tI]Iring
受大应变的柔软材料制成,具有无限多自由度和连 续变形能力,可在大范围内任意改变自身形状和尺
分解的材料,当软体机器人完成任务后可被人体分
解吸收一J。表l对比了各种机器人的特性…。
寸。软体机器人具有无限多自由度,所以它具有无
表l各种机器人特性比较
本文介绍了软体机器人的研究现状,包括软体
机器人的结构形式与运动机理、驱动方式、运动学 与动力学建模以及加工方法,分析了软体机器人作
b伊cr=嚼酣岫d柚t
∞legori%:∞ft mbot body fal晡cation’∞tlIato鹅fbr∞ft robots and s讯吃chable
bc
applied协so俳boIdicd robot脚证calion,such鲢shapc
depositi∞咖factl|ring,laser面_aging勰d
软体机器人综述

软体机器人综述0 前言机器人现如今广泛存在于军事、工厂、科学探索等领域,但传统的刚性机器人由于其采用刚性材料,具有结构复杂、空间适应能力差、灵活度有限等问题,已不能满足在狭小通道、受限空间等复杂环境中的要求,于是衍生了一门新兴学科—软体机器人。
软体机器人本体采用软材料或柔性材料加工而成,可连续变形,从原理上具有无限自由度,自身良好的安全性和柔顺性弥补了刚性机器人的不足。
软体机器人可以满足军事侦察隐蔽性的要求,对地震灾害、矿难等事故空间的不规则性有良好的适应能力。
软体机器人是仿生机器人的发展,其模型为自然界中的软体动物。
因为软体机器人的无限自由度,所以它有无穷多种将末端执行器达到指定位置的方法。
由于对压力的低阻抗,软体机器人对环境具有更好的适应性,通过被动变形实现与障碍物的相容;通过主动变形使机器人处于不同的形态并实现运动;主动变形与被动变形相结合,机器人可以挤过比自身常态尺寸小的缝隙,进入传统机器人无法进入的空间。
1 研究现状1991年,日本东芝公司和横滨国立大学发明了一种三通道纤维驱动器,在该驱动器作用下实现了拉压、扭转、弯曲等动作,其在腿式移动机器人和工业抓取上得到了较好的应用。
2021年,日本冈山大学和大版大学合作研发出了蝠鲼机器人,该机器人利用纤维增强驱动器,通过控制两个驱动器的弯曲实现在水里游动的动作。
2021年,美国国防部高级研究计划局开始研究软体机器人—Chembots,Chembots是一种采用软体材料,在改变自身形状和尺寸的条件下通过狭小缝隙,并且能够带有负荷完成一定动作。
Chembots 是化学、机器人学和材料学科交叉研制的结果。
2021年欧洲5个国家成立章鱼项目组,旨在研究章鱼传感器机器驱动原理,对章鱼的运动从组织结构进行分析并模拟生物力学特性,提出了收缩横向肌肉实现伸长,收缩轴向肌肉实现缩短,收缩外部和内斜纹肌实现扭转功能。
2021年哈佛大学的研究者们研制成功了一种章鱼形状的全柔性机器人—Octobot。
软体机器人

起源
起源
软体机器人科学家们从自然界汲取灵感,创造出远比那些传统的金属制同类更加灵活和多功能的机器人。
美国哈佛大学的科学家们制造了一种新型柔韧机器人,它的身子非常柔软,可以像蠕虫一样依靠蠕动在非常 狭窄的空间里活动。这个哈佛大学科研小组由化学家乔治怀特塞兹(George M. Whitesides)率领,他们从鱿鱼, 海星和其它没有坚硬骨骼的动物身上获得启发,研制了一种小型的,有四条腿的橡皮机器人。
今年早些时候,一个来自塔夫茨大学的小组展示了由他们开发的一种体长仅10厘米的蠕虫机器人,它采用硅 氧橡胶制成,可以爬进一个小球并在里面推动小球向前滚动。
而此次哈佛大学的此项研究是在美国国防部的研究资助项目下进行的,有关进展本周一在《美国国家科学院 院报》上作了发表。这个软体机器人体长约12.7厘米,制造的过程花费了两个月。其四肢可以各自独立操控,通 过人工或计算机自动控制将压缩空气输入其肢体内进行相应驱动。这让这种新型机器人具备了无法比拟的灵活性, 可以自由地在地面爬行或者滑行。
怀特赛德斯说:“这不是一个煞费苦心的概念,但实现这种运动是很不寻常的。在这些看似(四肢)很简单 的驱动下,从中你会看到非常有趣的运动。”他指出,虽然这种机器人的运动和构造确实很像海星似的软体动物, 但目的是模仿它的功能,而不是其机制。
材料
这种新型柔体机器人可采用合成纸质材料、纤维织物和金属丝增强结构,具有硅胶外形。当它们模塑成型之 后,该机器人与复杂的压缩气体源进行连接,例如:空气注射泵。
简介
原理
设计
材料
原理
软体机器人模具制造软体机器人使用的是怀特赛德斯团队发明的软光刻技术。其生产过程是:借助电子元件 让光照射模具的表面,致使覆盖在图案上一层薄薄的高分子膜曝光,以此溶解没有图案的区域。怀特赛德斯说: “这是一个非常成功的技术,它具有很高的分辨率,相当小巧,但在批量化生产之前成本比较昂贵。”
软体机器人综述

软体综述软体综述1、简介该文档旨在对软体进行全面综述,介绍其定义、应用领域、技术原理、发展趋势等内容。
2、定义软体是指具有柔软身体结构和类似生物组织的,其设计灵感源自人类和动物的运动机制。
与传统硬体相比,软体拥有更高的适应性和柔软性。
3、应用领域3.1 医疗领域软体在医疗领域中具有广泛的应用前景。
它们可以应用于手术操作辅助、康复治疗和药物输送等领域,带来更安全、精确和有效的医疗服务。
3.2 制造业软体在制造业中的应用主要体现在柔性制造和组装方面。
柔软的身体结构使软体能够灵活适应不同形状的工件,并完成高精度的组装任务。
3.3 探索与救援软体在探索与救援任务中发挥着重要作用。
它们可以适应不同的环境,并在狭窄、危险或无法人类到达的地方执行任务,如地震救援和火灾侦测等。
4、技术原理4.1 柔软身体结构软体采用柔软的身体结构,通常由弹性材料制成。
这种结构使其能够承受外部压力和变形,并具备类似动物的运动特性。
4.2 传感技术软体通过传感器获取外部环境信息,如压力、温度和湿度等。
这些传感器可以帮助做出反应并适应不同情况。
4.3 控制系统软体的控制系统负责对其运动进行控制和协调。
控制系统通常包括算法、电子和软件等组成部分,使能够执行各种任务。
5、发展趋势5.1 柔软材料的发展随着柔软材料技术的不断发展,软体的身体结构将更加逼真和灵活,为其在各个领域的应用提供更多可能性。
5.2 机器学习的应用机器学习技术的应用将使软体能够根据环境和任务需求进行学习和调整,提高其自主性和适应性。
5.3 人机协作软体与人类的协作将成为未来发展的一个重要方向。
通过与人类紧密合作,软体可以在各种任务中发挥更大的优势。
6、附件本文档附有相关文献引用、案例分析和技术图表等信息。
请查阅附件获取更详细的内容。
7、法律名词及注释7.1 伦理学伦理学是研究与人类和社会之间的道德和伦理问题的学科领域。
7.2 专利法专利法是一种法律制度,保护创新性和新颖性发明的权益,为发明者提供一定的独占权。
软体机器人的力学特性分析与控制方法研究

软体机器人的力学特性分析与控制方法研究软体机器人是一种能够模拟生物体柔软结构和运动的机器人系统。
相比传统的刚体机器人,软体机器人具有更强的适应性和灵活性,能够适应不同的工作环境和执行复杂的任务。
在软体机器人研究领域,力学特性分析和控制方法是两个重要的研究方向。
本文将重点介绍软体机器人的力学特性分析和控制方法,并对相关研究进行综述。
一、软体机器人的力学特性分析软体机器人的力学特性分析是研究软体机器人结构和材料力学特性的过程。
软体机器人的结构由柔性材料构成,其力学行为具有非线性和非刚体特性。
软体机器人的力学特性分析可以帮助研究人员更好地理解软体机器人的运动原理和性能优化方法。
1. 软体机器人的力学建模软体机器人的力学建模主要包括材料力学模型和结构力学模型两个方面。
材料力学模型是描述软体机器人材料力学性质的数学模型,常用的模型包括线性弹性模型、非线性弹性模型和粘弹性模型等。
结构力学模型是描述软体机器人整体结构和形变的数学模型,常用的模型包括连续介质力学模型和离散元力学模型等。
2. 软体机器人的有限元分析有限元分析是一种常用的力学分析方法,可以用于对软体机器人力学特性进行数值模拟和优化设计。
有限元分析将软体机器人离散化为有限个节点和元素,通过求解节点位移和应变来计算其力学响应。
有限元分析可以帮助研究人员深入了解软体机器人的形变行为和应力分布,并且可以指导软体机器人的设计和控制。
3. 软体机器人的实验力学测试实验力学测试是分析软体机器人力学特性的有效手段,可以通过测量软体机器人的形变、应变和力学响应来获取其力学性质。
常用的实验力学测试方法包括机械拉伸测试、压缩测试和弯曲测试等。
实验力学测试可以验证和修正力学模型,并提供真实的实验数据用于控制方法的研究。
二、软体机器人的控制方法研究软体机器人的控制方法研究是研究软体机器人实现预定运动和任务的方法和技术。
软体机器人的控制方法要求具备对软体结构的建模和力学特性分析的基础上,能够实现精确的运动和姿态控制。
软体仿生机器人研究现状

目前,软体仿生机器人的研究主要集中在以下几个方面:
(1)仿生运动学:研究如何模仿生物体的运动方式和运动规律,以提高机 器人的运动能力和适应性。
(2)柔性材料:研究柔性材料的性质、制备方法、加工工艺等方面的内容, 以提高机器人的柔韧性和耐用性。
(3)感知与控制:研究机器人的感知与控制方面的内容,包括如何感知环 境信息、如何作出决策、如何控制机器人的运动等方面的问题。
尽管软体仿生机器人已经取得了一定的进展,但仍存在一些不足之处,如:
(1)仿生程度不够高:目前的软体仿生机器人往往只是模仿生物体的部分 特征,难以做到全方位的仿生。
(2)运动能力有限:由于软体材料的限制,机器人的运动能力和范围受到 一定的限制。
(3)感知与控制难度大:由于机器人需要感知复杂的外部环境信息,并需 要进行实时的控制和决策,因此感知与控制方面的难度较大。
软体仿生机器人研究现状
01 引言
03 参考内容
目录
02 研究现状
引言
随着科技的不断发展,机器人技术逐渐成为当今社会研究的热点领域之一。 软体仿生机器人作为机器人领域的一个分支,具有仿生能力强、适应环境能力高、 低耗高效等优点,在医疗、航空、服务等领域具有广泛的应用前景。本次演示将 对软体仿生机器人的研究现状进行综述,介绍其定义、研究现状、应用领域等方 面,并探讨未来的发展方向。
发展历程
软体机器人作为一种新兴的领域,其发展历程可以追溯到20世纪90年代。当 时,一些科学家开始研究如何将生物体的柔软性和灵活性应用到机器人中,以实 现更加逼真的模拟效果。21世纪初,随着材料科学、制造技术、传感器等技术的 不断发展,软体机器人的研究得到了更多的。
研究现状
1.材料研究
软体机器人的核心部件是材料,因此材料的研究是软体机器人研究的基础。 目前,研究者们主要从材料的硬度、弹性模量、耐高温等方面进行研究,以寻找 更加适合软体机器人的材料。其中,弹性硅胶、聚氨酯等材料是最常用的材料之 一。
软体机器人研究现状综述

738 oC,与过氧化 氢分解 温度接 近 。喷注面外 壁温 度分别 为
101 ℃和 192 oC。
出 式 (7)。
Pv-RT
(7)
式中 R为工质的气体 常数 ;P为压强 ,MPa;v为 比体积 ,in,。
联立上述 2式可知喷管 出口处的工质温度和压强与推力室的温
度压强之 间满足如下关系。
(1)针 对 以 H:O 为 推 进剂 的火 箭 背包 ,从 理论 上 计 算 rr发 动 机壳体外壁和喷管 出口羽流的温度 ,并与实验数据进行了比对 。
(2)计算表 明裸露钢制壳体 的外 壁温度最高 约为 720℃, 会烫伤人体 ,需要在壳体外面安装绝热层等隔热机构 。
(3)羽 流温度约 270 ℃,在起 降过程 中可能会 对地 面附近 人员造成 伤害 ,使用中应在空 旷开 阔场地进行起降。另外 ,喷管 的位置应尽量远离飞行员的躯干 ,避免 飞行员肢体无意 中进入 发 动机 的尾 流 场 。
制的仿毛虫机 器人 、麻 省理工 大学 研制 的“气动运动链 ”化学机 金材料 ,能 够通过升温使其 消除低 温时发 生的变形 ,从 而恢 复
器人 、El本所研制 的以形状记忆合金 为基础 的蠕动跳跃机器人 、 原有形状 ,同时 SMA材 料还拥有高 质量质量 比[101;化学驱动方
国内浙江大学学生研发的仿 生蚯蚓 以及 由欧洲 多国的研究机构 式是应用将 化学反应 中的化学 能转化 为机械能 ,从而驱 动软
摘 要 :软体机器人是一种人们从 自然 生物 中获取灵感设计制造 的完全 由软 体材料 构成的仿生机 器人 ,与刚性机 器人 相比 ,其 自身 柔顺性和 自由度更高,能够更好地适应非结构环境 ,常被 用来抓取物体 、复杂环境探 索、医疗康复等。总结软体机 器人结构特点 、驱 动 方 式 、制 造 加 工 、研 究现 状 ,探 讨 软 体机 器人 的发 展 方 向 。 关键词 :软体机器人 ;结构特点 ;驱动方式 ;制造加工 中图 分 类 号 :TP242 文 献 标 识 码 :B DOI:10.16621/j.cnki.issnl001—0599.2018.01D.21
软体机器人综述

软体机器人综述随着科技的不断发展,机器人已经成为了现代社会中不可或缺的一部分。
而软体机器人作为机器人领域中的一种新兴技术,具有其独特的优势和特点,受到了广泛的和研究。
本文将对软体机器人的研究现状、发展趋势以及应用领域进行综述。
软体机器人是一种由柔性和可延展材料构成,具有类生物体运动和适应能力的机器人。
与传统机器人相比,软体机器人具有更好的适应性和灵活性,可以适应各种复杂的环境和任务。
目前,国内外的研究者们已经开发出了多种不同类型的软体机器人,如仿生机器人、柔性机器人、可穿戴机器人等。
其中,仿生机器人是软体机器人领域中的一个研究热点。
这种机器人可以通过模仿生物体的形态和运动方式来实现类似生物体的运动和适应能力。
例如,一些仿生机器人可以模仿鸟类的飞行方式,实现飞行和空中悬停等动作。
另外,柔性机器人也是一种重要的软体机器人类型。
这种机器人通常由柔性的材料构成,可以通过改变自身的形状和大小来实现运动和适应。
例如,一些柔性机器人可以通过改变自身的形状来实现爬行、滚动等动作。
随着技术的不断发展,软体机器人的发展也呈现出一些新的趋势。
软体机器人的智能化程度将不断提高。
未来的软体机器人将更加智能化,可以通过感知和识别环境来实现自适应和自主决策。
软体机器人的可穿戴性和便携性将不断提高。
未来的软体机器人将更加轻便和灵活,可以适应各种不同的环境和任务。
软体机器人的制造工艺将不断改进。
未来的软体机器人将更加精细和可靠,可以通过大规模生产来实现商业化应用。
软体机器人的应用领域非常广泛,可以应用于医疗、军事、救援、服务等领域。
在医疗领域中,软体机器人可以用于手术辅助、康复训练等方面。
在军事领域中,软体机器人可以用于侦察、探测、排爆等方面。
在救援领域中,软体机器人可以用于搜救、排险等方面。
在服务领域中,软体机器人可以用于家政、餐饮、酒店等方面。
软体机器人作为机器人领域中的一种新兴技术,具有其独特的优势和特点,未来的发展前景非常广阔。
软体机器人研究发展综述
机器人已广泛应用于诸多领域,但传统机器人的结构刚性强,环境适应性差。
为克服在狭窄空间内运动受到限制的缺点,科学家们从自然界汲取灵感,创造出远比那些传统的金属制同类更加灵活和多功能的软体机器人。
软体机器人的设计灵感来自于广泛存在在自然界中的各种软体动物,因其主要材料为柔软材料,理论上自由度为无穷,并可以在一定限度内随意变化形态。
该文介绍了软体机器人结构机理、驱动方式、控制方法及攻克难点等问题,并通过分析和梳理软体机器人的发展历程,分析了软体机器人未来的发展方向。
1 研究现状软体机器人是仿生机器人研究的后续,已引起各国的高度重视。
目前典型的软体机器人有麻省理工学院、哈佛大学所研发的Me s hwor m机器人,可以使用S M A模拟蚯蚓蠕动并能抵抗强的冲击[1];意大利LASCH I等正在研制的仿生章鱼;康奈尔大学的集可发光人造皮肤与充气结构为一体的软体机器人;弗吉尼亚大学研发的仿生蝠鲼机器鱼通过离子交换聚合金属材料驱动,具有切换不同运动模式的能力。
2 结构机理2.1 蠕虫蠕虫并不具有刚性骨骼,它的身体主要部分是表皮、肌肉、体液和神经系统。
蠕虫并不通过骨骼传递力,而是通过封闭流体产生静压力,它的躯体属于流体静力骨骼结构。
以蚯蚓为例,全身体积的40%为肌肉,它的肌肉属于斜纹肌,由斜纹肉构成封闭腔,内部充满体液。
而体液限制了体积的变化,所以当肌肉收缩时,会在另一方向上有相应的长度变化,与肠蠕动过程类似。
纵肌和环肌通过收缩改变直径的大小,由此蠕虫在每个体节间运动肌肉,借由行进波来完成身体的变形和移动。
2.2 头足类动物头足类动物(如章鱼、鱿鱼、墨鱼等)具有进行高难度的柔性运动的能力。
在一定范围内,每只触手都可以随意弯曲,配合空间改变身体长度[2]。
章鱼触手是肌肉性静水骨骼结构,横向和轴向肌肉分别控制触手的伸长和缩短,在行动过程中由沿触手分布的神经系统进行指令的传达,中枢神经系统并非主要控制系统,由此可知,身体与环境之间的信息反馈交互会导致相应的自主运动。
软体机器人报告
软体机器人报告1. 概述软体机器人是一种基于软体材料制作的机器人。
与传统的刚性材料机器人相比,软体机器人具有更高的柔韧性和适应性。
软体机器人的材料可以是柔软的橡胶、塑料或者是充满液体的气囊等。
软体机器人的特殊材料赋予了其处理复杂环境和与人类进行亲密互动的能力。
本文将介绍软体机器人的原理、应用和未来发展方向。
2. 原理软体机器人的原理基于软体材料的柔韧性和可变形性。
软体材料具有高度的变形能力,可以实现复杂的形状变化和运动。
软体机器人利用气囊、弹性材料或可塑性材料作为主要结构,通过调节内部气体或液体的压力来实现运动控制。
软体机器人的运动方式可以是爬行、游泳、扭曲或变形。
软体机器人的控制方法可以是传统的刚体机器人控制,例如使用电机和传感器来实现。
此外,还可以采用自适应控制方法,利用软体特性来实现更灵活的控制。
软体机器人的控制算法可以使用神经网络、遗传算法或其他机器学习方法来优化。
3. 应用软体机器人具有广泛的应用前景,特别是在一些特殊环境和任务中。
以下是软体机器人的一些应用领域:3.1 医疗领域软体机器人在医疗领域可以用于内窥镜手术、微创手术和康复治疗等。
由于软体机器人具有柔软性和适应性,可以更轻松地进入人体内部,减少手术对患者的损伤。
同时,软体机器人可以根据不同患者的情况进行形状变化,提供更精确的治疗。
3.2 救援与灾害响应软体机器人可以在救援和灾害响应中发挥重要作用。
由于软体机器人具有较高的柔韧性和适应性,可以适应不同的地形和环境。
软体机器人可以用于搜救被困人员、探测搜寻物品或测量地面情况。
3.3 工业自动化软体机器人在工业自动化中可以承担重复性和危险性高的任务。
软体机器人由于柔韧性和可变形性可以适应不同形状和物体的抓取和操作。
此外,软体机器人还可以与人类工作人员协同工作,提高工作效率。
3.4 智能家居软体机器人可以用于智能家居中的各种任务。
例如,软体机器人可以用于清洁、服务和安全等方面。
由于软体机器人具有与人类进行亲密互动的能力,因此可以成为家庭成员的助手和伴侣。
软体机器人研究发展综述

软体机器人研究发展综述作者:刘璟张益峰王子又来源:《科技创新导报》2017年第10期摘要:软体机器人是一类新型仿生连续体机器人,可以在一定限度内随意变化形态,在生物工程、救灾救援、工业生产、医疗服务、勘探勘测等领域均有广泛应用。
其结构模仿生物的流体静力骨骼结构,采用形状记忆合金、化学驱动、气压驱动等驱动方式将其他形式能转化为机械能。
但还没有可以通用的控制算法适用于所有软体机器人,建模仍是一大难点。
综述了软体机器人结构机理、驱动方式等问题,并通过分析和梳理软体机器人的发展历程,分析了软体机器人未来的发展方向。
关键词:机器人建模结构机理中图分类号:TP242 文献标识码:A 文章编号:1674-098X(2017)04(a)-0118-02机器人已广泛应用于诸多领域,但传统机器人的结构刚性强,环境适应性差。
为克服在狭窄空间内运动受到限制的缺点,科学家们从自然界汲取灵感,创造出远比那些传统的金属制同类更加灵活和多功能的软体机器人。
软体机器人的设计灵感来自于广泛存在在自然界中的各种软体动物,因其主要材料为柔软材料,理论上自由度为无穷,并可以在一定限度内随意变化形态。
该文介绍了软体机器人结构机理、驱动方式、控制方法及攻克难点等问题,并通过分析和梳理软体机器人的发展历程,分析了软体机器人未来的发展方向。
1 研究现状软体机器人是仿生机器人研究的后续,已引起各国的高度重视。
目前典型的软体机器人有麻省理工学院、哈佛大学所研发的Meshworm机器人,可以使用SMA模拟蚯蚓蠕动并能抵抗强的冲击[1];意大利LASCHI等正在研制的仿生章鱼;康奈尔大学的集可发光人造皮肤与充气结构为一体的软体机器人;弗吉尼亚大学研发的仿生蝠鲼机器鱼通过离子交换聚合金属材料驱动,具有切换不同运动模式的能力。
2 结构机理2.1 蠕虫蠕虫并不具有刚性骨骼,它的身体主要部分是表皮、肌肉、体液和神经系统。
蠕虫并不通过骨骼传递力,而是通过封闭流体产生静压力,它的躯体属于流体静力骨骼结构。
软体机器人的研究与应用

软体机器人的研究与应用随着人工智能、机器人技术和材料科学的进步,软体机器人的研究和应用日渐广泛。
与传统机器人相比,软体机器人具有更高的灵活性和适应性,能够完成更加复杂的任务,因此受到越来越广泛的关注。
本文将介绍软体机器人的基本概念、研究动态以及未来的应用前景。
一、软体机器人的基本概念软体机器人是一种由柔性材料制成的机器人,主要包括身体、传感器和执行器。
与传统机器人相比,软体机器人更加灵活、仿生、适应性和容错性更强,能够自适应地调整形状和运动以完成任务。
软体机器人的人工智能和机器学习算法也越来越成熟,能够对环境变化做出更加灵敏的响应和适应。
二、软体机器人的研究动态1. 软体机器人的材料技术软体机器人的制造需要用到柔性材料,这种材料需要同时满足高弹性、可调节性和可扩展性等特性。
目前,研究者正在探索一系列新型材料,包括聚合物、超细纤维、金属纤维等,以提高软体机器人的制造效率和性能表现。
2. 软体机器人在医学中的应用软体机器人在医疗领域中有着广泛的应用,能够为人类医学带来革命性的变化。
软体机器人的一个显著优点是其能够自适应地适应生物体的形状和大小,能够在人体内进行微创手术或治疗。
目前,针对针灸、脊柱矫正等医疗技术,使用软体机器人开展实验,证明了其优秀的适应性。
3. 软体机器人在工业中的应用软体机器人在工业领域中也有着广泛的应用,可以用于制造和组装,同时能够减少工作人员的安全风险。
软体机器人具有柔性、重新构成、抗变形等性质,能够在材料加工、医疗、娱乐和卫生等领域发挥巨大作用。
三、软体机器人的未来应用软体机器人的未来应用前景是十分广阔的,目前人们已经在推动其在医疗、教育、卫生、汽车制造、烹饪、娱乐等多个方向开展研究。
未来,软体机器人能够成为我们日常生活中的重要组成部分。
例如可以应用于智能家居中,实现家庭空气净化、自动遇水摆放和地面自动吸尘等。
四、软体机器人的挑战与未来发展虽然软体机器人的应用已经取得了一些成果,但仍存在一些挑战需要克服。
软体机器人的研究与实践

软体机器人的研究与实践随着社会的进步,机器人已经不再是科幻作品中的想象,而是已经成为了我们日常生活的一部分,无论是在工厂的流水线生产中,还是在医疗机构的手术室中,机器人都扮演着越来越重要的角色。
而其中一种让人们赞叹不已的机器人就是软体机器人。
本文将探讨软体机器人的研究与实践。
一、软体机器人的概念与特点软体机器人是指一种由柔性材料制成的机器人,其外形可以自由变化,并且具有高度的适应性和可塑性。
与传统的硬体机器人相比,软体机器人具有以下特点:1. 材料:软体机器人的主要部件都是由柔软、具有变形能力的材料制成,如橡胶、硅胶、气垫等。
2. 结构:软体机器人的结构与传统的硬体机器人不同,它的结构是由通过气体或液体互相联通的许多空腔构成的,这就赋予了软体机器人可变形和可塑性的能力。
3. 运动:软体机器人的运动模式和硬体机器人也不同,它可以通过内部气压的变化、电磁力的变化或化学反应等原理实现运动。
二、软体机器人的应用软体机器人由于其独特的性质,已经得到越来越广泛的应用,涉及的行业不仅仅是制造业,还包括医疗、军事、生物学等领域。
1. 制造业:软体机器人可以像传统的硬体机器人一样在流水线上执行各种工作,如装配、拆卸、搬运等。
但与硬体机器人不同的是,软体机器人可以更加灵活地适应各种不同的形状和环境,从而提高了生产效率。
2. 医疗:软体机器人在医疗领域的应用也逐渐增多。
例如,在手术中,软体机器人比传统的硬体机器人更有利于对患者的处理,因为它的柔软外形可以更好地适应患者的身体部位,从而更加准确地进行手术。
此外,软体机器人还可以用于监测生命体征以及进行药物输送等。
3. 军事:软体机器人在军事方面的使用也越来越普遍。
例如,软体机器人可以用作勘探和侦察设备,或者在战场上提供援助。
由于其柔软的外形和可塑性使得其比传统的硬体机器人更加适合于在不规则形状的地形中行动。
三、软体机器人的研究与实践虽然软体机器人已经具有如此的广泛应用,但是它的研究却不断推动着它的发展,正是这些研究为软体机器人的进一步应用打下了坚实的基础。
软体机器人气压驱动结构研究综述
软体机器人气压驱动结构研究综述一、本文概述随着科技的飞速发展,软体机器人作为一类新型机器人技术,正逐渐受到广泛关注。
与传统的刚性机器人相比,软体机器人具有更好的柔韧性、适应性和安全性,因此在许多领域如医疗、救援、农业等具有广阔的应用前景。
气压驱动作为软体机器人的一种重要驱动方式,具有结构简单、易于控制、成本低廉等优点,因此成为研究热点。
本文旨在对软体机器人气压驱动结构的研究进行综述,概括国内外在该领域的研究现状和发展趋势,以期为相关领域的研究者提供参考和借鉴。
本文将介绍软体机器人的基本概念和分类,阐述气压驱动在软体机器人中的应用及其优势。
然后,从驱动原理、结构设计、性能分析等方面对软体机器人气压驱动结构进行详细介绍,重点综述国内外在该领域的研究成果和进展。
接着,本文将分析软体机器人气压驱动结构研究中存在的问题和挑战,探讨未来的研究方向和趋势。
本文将对软体机器人气压驱动结构的发展前景进行展望,以期推动该领域的研究和应用取得更大的突破。
通过本文的综述,读者可以全面了解软体机器人气压驱动结构的研究现状和发展趋势,为该领域的研究者提供有益的参考和启示。
本文也希望能够激发更多研究者对软体机器人气压驱动结构的兴趣,共同推动该领域的技术进步和应用拓展。
二、软体机器人气压驱动结构的基本原理软体机器人气压驱动结构的基本原理主要依赖于空气压力的变化来驱动机器人的运动。
这种驱动方式通过向软体机器人的内部腔室注入或排出空气,从而改变其内部压力,进一步引发材料的伸缩或弯曲变形,最终驱动机器人实现各种运动模式。
在气压驱动结构中,软体机器人的材料选择至关重要。
常用的材料包括硅胶、橡胶、气凝胶等,它们都具有较好的弹性和密封性,能够在气压变化下产生稳定的形变。
这些材料被制作成特定的形状和结构,如气管、气囊或气腔,并与机器人的驱动机构和控制系统相连接。
当向软体机器人的内部腔室注入空气时,气压的增加会使材料发生膨胀,从而推动机器人发生形变。
软体机械手研究综述

2 0 1 7 年 7 月 机械工程 Nhomakorabea学
报
vo1 . 53 N O. 1 3
J OURNAL 0F M ECHANI CAL ENGI N EERI NG
J u 1 .
2 0 1 7
DoI :1 0. 3 90 1 / J M E. 20 1 7. 1 3. 01 9
p o t e n t i a l a p p l i c a t i o n s .T h e r e v i e w o f e x i s t i n g s o t f - b o d i e d ma n i p u l a t o r s i n t e r ms o f a p p l i c a t i o n s ,a c t u a t i o n me t h o d s , ma t e i r a l s a n d
软体 机械 手研 究综述木
张进华 王 韬 洪 军 王 煜 ’ 2
f 1 .西 安交 通大 学制 造 系统 工程 国家 重 点实 验室 西安 7 1 0 0 4 9 ;
2 .香港 科技 大学 机械 与 航 空航天 工 程系
香港
9 9 9 0 7 7 )
摘要 :软体机械 手( 下面简称软体手) 是一种 由柔性材料制成的新型机械装置 。凭借柔 性材 料天然的柔顺 性和适应 性,软体机 械手具有 了高灵活性、复杂环境适应性和安全人机 交互性等特 点 ,受到 国内外学者和机构 的广泛研 究,并表现 出 良好 的应用 前景 。综述 了软体机械手 的应 用领 域、驱动方式 、材料与制造 、建模与控制 的相关 问题 ,并梳 理了软体机械手研 究中依旧存 在 的问题和 可能的解决方案 以及软体机械手 的发展趋势 。 软体机械手 是软体机器人领域的一个重要分支 , 其研究涉及材料学 、 力学 、化学、机械设计与 制造 、电子与控制科学 以及仿 生学等诸多领域 的交叉和融合 。对 软体机械 手的研 究将 极大丰 富人 们 对柔性 材料的复杂、丰富特性 的理解 ,也将 为更好地把柔性材料融入产 品的设计提供理论和技术指导 。 关键词 : 软体机械手 :软体 机器人;人机交互 ;柔性材 料
软体机器人运动学与动力学建模综述
软体机器人运动学与动力学建模综述一、本文概述随着科技的飞速发展,软体机器人作为一种新兴的技术领域,正在吸引着越来越多的研究关注。
作为一种具有高度灵活性和适应性的机器人,软体机器人在医疗、航空、深海探索等众多领域展现出巨大的应用潜力。
然而,软体机器人的运动学与动力学建模一直是制约其进一步发展的关键因素之一。
本文旨在对软体机器人的运动学与动力学建模进行综述,梳理相关领域的研究成果,以期为未来软体机器人的设计与应用提供理论支持。
本文首先介绍了软体机器人的基本概念和分类,阐述了其相较于传统刚性机器人的独特优势。
接着,详细阐述了软体机器人运动学建模的基本原理和方法,包括基于几何关系的建模、基于能量原理的建模等。
在动力学建模方面,本文重点介绍了软体机器人动力学模型的构建过程,包括质量分布、惯性矩阵、刚度矩阵等的确定,以及动力学方程的建立与求解。
本文还综述了软体机器人在运动学与动力学建模过程中面临的挑战与问题,如模型复杂性、参数辨识、实时控制等。
对国内外在软体机器人建模领域的最新研究进展进行了梳理和评价,以期为读者提供一个全面、深入的软体机器人运动学与动力学建模的参考框架。
本文展望了软体机器人运动学与动力学建模的未来发展趋势,提出了可能的研究方向和应用领域,为相关领域的研究者提供了一定的参考和启示。
二、软体机器人运动学建模软体机器人运动学建模是研究和描述软体机器人运动规律的重要方法。
与传统的刚性机器人不同,软体机器人由于其结构的柔软性和可变形性,其运动学建模过程更为复杂。
在软体机器人的运动学建模中,主要关注的是机器人末端执行器或特定点的位置、速度和加速度等运动学参数,而不涉及机器人的内部应力、应变等动力学因素。
软体机器人的运动学建模通常基于几何学和运动学原理。
一种常用的方法是基于连续介质力学的理论,将软体机器人视为连续变形的弹性体,通过描述其形状和位置的变化来建立运动学模型。
另一种方法是基于离散元法,将软体机器人划分为一系列离散的单元,通过描述这些单元之间的相对位置和关系来建立运动学模型。
软体机器人设计和控制
软体机器人设计和控制软体机器人是一种在机器人技术领域中比较新的概念,与传统的硬体机器人不同,软体机器人的主要构造材料是柔性材料,往往采用基于水平或无骨架的结构,可以模仿生物体,能够充分适应复杂环境中存在的不确定性因素,具有出色的柔性和灵活性。
本文将从软体机器人设计和控制两个方面来介绍软体机器人的概念、特点、应用和未来展望。
一、软体机器人的特点1.具有高度柔性和可变形性软体机器人的主要材料是柔性材料,它可以承受被弯曲、拉伸、扭曲以及压缩等多种形变,并能在恢复形状的过程中存储和释放能量。
因此,它可以有效地适应各种不同形状的环境以及执行各种不同的任务。
2.适应性强软体机器人的柔性和可变形性使得它可以适应各种不同的环境和工作场景。
比如在海底的研究、医疗领域内,软体机器人可以轻松地穿过生物体内的狭窄通道来进行治疗或者检测。
3.具有很好的鲁棒性软体机器人的柔性让它具有很好的鲁棒性,可以承受碰撞、变形等各种外力对其的干扰。
因此,在吸附任务,军事作战,特殊环境探索等领域有着广泛的应用前景。
二、软体机器人的设计1.软体机器人的结构类型根据结构形式,软体机器人主要可以分为基于水平的结构和基于无骨架的结构两种类型。
基于水平的结构是在柔性外壳内部填充一定的液体或气体,当外壳受到外力影响时,对液体或气体的压力变化会导致外壳的形状进行变形。
无骨架的结构是由一系列的连续柔性片材制成,可弯曲和旋转,因此在形状变化方面的灵活性更高。
2.材料性能的影响软体机器人的设计的一个重要方面就是选择合适的材料,目前主流的软体机器人采用的主要材料有硅胶、聚氨酯和液晶弹性体等等。
材料的选择对机器人的柔性和可变形性有很大的影响。
3.关键技术:软体机器人的模型设计和仿真在软体机器人的设计中,软体机器人的模型设计和仿真是很重要的工作。
借助计算机,利用一些基于有限元、多体动力学和松弛动力学的仿真工具,可以更好地模拟、设计和优化软体机器人的表现。
三、软体机器人的控制技术1.软体机器人的操纵系统软体机器人的操纵系统是其控制的重要组成部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
软体机器人综述
作者:苏航孙夏爽史伟陈发光
来源:《科学与财富》2018年第34期
摘要:软体机器人是一种新型机器人,由可承受大应变的柔性材料构成。
其具有良好的环境适应性,能够根据周围环境情况,在大范围内对自身的形状做出改变,因此软体机器人在军事侦查、医疗卫生等领域具有广阔的应用前景。
综述软体机器人的驱动方式、加工制造等问题。
对软体机器人发展现状进行分析总结,并对未来软体机器人的发展趋势进行探讨。
关键词:软体机器人;驱动方式;加工制造;智能材料;
0 前言
机器人现如今广泛存在于军事、工厂、科学探索等领域,但传统的刚性机器人由于其采用刚性材料,具有结构复杂、空间适应能力差、灵活度有限等问题,已不能满足在狭小通道、受限空间等复杂环境中的要求,于是衍生了一门新兴学科—软体机器人。
软体机器人本体采用软材料或柔性材料加工而成,可连续变形,从原理上具有无限自由度,自身良好的安全性和柔顺性弥补了刚性机器人的不足[1] 。
软体机器人可以满足军事侦察隐蔽性的要求,对地震灾害、矿难等事故空间的不规则性有良好的适应能力。
软体机器人是仿生机器人的发展,其模型为自然界中的软体动物。
因为软体机器人的无限自由度,所以它有无穷多种将末端执行器达到指定位置的方法。
由于对压力的低阻抗,软体机器人对环境具有更好的适应性,通过被动变形实现与障碍物的相容;通过主动变形使机器人处于不同的形态并实现运动;主动变形与被动变形相结合,机器人可以挤过比自身常态尺寸小的缝隙,进入传统机器人无法进入的空间[2]。
1 研究现状
1991年,日本东芝公司和横滨国立大学发明了一种三通道纤维驱动器,在该驱动器作用下实现了拉压、扭转、弯曲等动作,其在腿式移动机器人和工业抓取上得到了较好的应用。
2007年,日本冈山大学和大版大学合作研发出了蝠鲼机器人,该机器人利用纤维增强驱动器,通过控制两个驱动器的弯曲实现在水里游动的动作。
2007年,美国国防部高级研究计划局开始研究软体机器人—Chembots,Chembots是一种采用软体材料,在改变自身形状和尺寸的条件下通过狭小缝隙,并且能够带有负荷完成一定动作。
Chembots是化学、机器人学和材料学科交叉研制的结果。
2009年欧洲5个国家成立章鱼项目组,旨在研究章鱼传感器机器驱动原理,对章鱼的运动从组织结构进行分析并模拟生物力学特性,提出了收缩横向肌肉实现伸长,收缩轴向肌肉实现缩短,收缩外部和内斜纹肌实现扭转功能。
2016年哈佛大学的研究者们研制成功了一种章鱼形状的全柔性机器人—Octobot。
他采用了过氧化氢分解产生水和氧气的化学反应为装置提供动力。
氧气通过内嵌的微阀门,使得Octobot的腕足进行交替摆动,从而实现了整体的运动。
2 驱动方式
驱动器为软体机器人的各部分行为提供动力,由于软体机器人可以实现大幅度的变形,所以对于驱动器提出了更高的要求,例如刚度可变、质量轻等。
现如今软体机器人的驱动方式可分为两种:物理驱动以及化学驱动。
2.1物理驱动
物理驱动多利用材料的物理性质来提供动力。
常见的物理驱动器有形状记忆合金(shape memory alloy, SMA)、电活性聚合物(Dielectric Electro Active Polymer,DEAP)、离子交换聚合金属材料(ion-exchange polymer metal composite, IPMC)、气动驱动器等。
原理简述如下。
形状记忆合金是一种合金,它可以“记住”其原始形状,且在加热时,变形返回到其变形前的形状。
形状记忆合金是通过热弹性与马氏体相变及其逆变而具有形状记忆效应,一般由两种以上金属元素所构成。
目前形状记忆材料里形状记忆性能最优的当属形状记忆合金。
电活性聚合物(EAP)是一类在电场激励下可以产生大幅度尺寸或形状变化的新型柔性功能材料,当外界电激励撤销后,它又能恢复到原始的形状和体积[3]。
电活性聚合物分为电子型EAP和离子型EAP。
电子型EAP驱动电压高,限制了其应用场合,离子型EAP需要潮湿环境,具有更为广泛的应用。
IPMC是一种合成复合纳米材料。
当向电极施加电压(电场)时,膜分子网络中带正电荷的共轭和水合阳离子被阳极排斥,并随着它们向携带水合水分子的负电极或阴极迁移。
这种迁移在膜上产生渗透压力梯度,导致IPMC条带以惊人的方式弯曲或变形。
气动驱动器即采用气泵的方式,通过高压气体为整个系统提供动力,该方式对环境没有污染,但受限于气泵的存在,应用受到限制。
2.2化学驱动
化学驱动即采用化学反应的方法为系统提供能量和动力。
将物质的化学能转化为机械能,驱动软体机器人运动。
特别当采用可逆反应时,能够为装置提供连续不断的能量,从而实现机器人的长时间工作。
Octobot机器人采用了过氧化氢分解出氧气来提供动力的方法。
也可以通过短时间内剧烈的氧化反应即爆炸方式提供大的冲量以实现机器人的跳跃的功能。
哈佛大学Robert F. Shepherd等发明的三足软体机器人利用电火花点燃甲烷产生的爆发力实现跳跃即采用此原理。
3 加工制造
区别于刚性机器人的加工方式,由于柔性材料的特殊性,传统的加工制造方法于软体机器人不再适用,需要新型的加工制造方法。
软体机器人的加工制造分为本体制造、可伸展电子电路制造等。
软体机器人本体制造主要基于快速成型技术,包括形状沉积法(shape deposition manufacturing,SDM)、熔融沉积成型、纳米复合材料沉积、纳米压印、激光消融、微注射成型等[2]。
SDM技术可以实现将复杂材料的新型结构制造出来。
SDM技术可以将传感器、柔性材料、刚性材料和电路集成在一起。
斯坦福大学的马克教授采用该方法,研制出了仿毛虫软体机器人。
其工艺步骤为:沉积—去除—沉积—微加工—埋入元件—沉积—去除—移除基体。
可伸展电子电路因为要配合软体机器人形变,须具有伸长、弯曲、扭转等要求,采用刚性电子元器件的方法无法适用于软体机器人。
故提出三种电路形式,一种是波纹状结构,即在原始状态下具有足够的冗余量以满足变形需要。
第二种是开环网状结构,开环网状结构可以实现电路的伸展。
第三种是将电解质溶液注入制造时预留的通道,可以满足大应变的要求,但也应注意到因大变形可能会出现的电解质“断流”现象。
4 总结与展望
软体机器人现如今比较成熟的应用领域是作为机器手,对于易破损、尺寸不规则的物体具有较好的保护和适应能力。
然而,由于其高柔顺性,其承担负载的能力限制了其应用。
现如今,国内外的软体机器人多在与结构形式、驱动能源等方面进行研究,对于如何将电子器件植入软体机器人内部、路径规划、控制、建模研究较少,这也是将来所需要进行深入研究方向。
未来软体机器人的形式应像人一样,具有独立获取能源、控制、运动等能力。
不过软体机器人作为一个新兴的研究方向,任重而道远。
参考文献:
[1]王田苗,郝雨飞,杨兴帮,文力.软体机器人:结构、驱动、传感与控制[J].机械工程学报,2017,53(13):1-13.
[2]曹玉君,尚建忠,梁科山,范大鹏,马东玺,唐力.软体机器人研究现状综述[J].机械工程学报,2012,48(03):25-33.
[3]尤小丹,宋小波,陈峰.软体机器人的分类与加工制造研究[J].自动化仪表,2014,35(08):5-9.。