西门子变频器参数表(S7和变频器通讯)
西门子S7-300PLC与G120系列变频器CU240S以太网通信实例讲解

3.周期性通信数据结构 3.1 周期性通讯的报文: 过程数据PZD:
注:当选定某种报文结构(报文999除外)时,相应的BICO连接将被确定,并且不 能修改。如果P0922 = 999,将保持当前的BICO联接,但是可以对其进行更改。
3.周期性通信数据结构 3.1 周期性通讯的报文: 控制字定义:
4.程序举例
4.2 SFC14/15通过参数通道控制
修改参数P2240.0,变量给定如下:
4.程序举例
图1 系统连接图
2.G120和S7-300之间的PN连接和设置
2.1设置通信接口
2.G120和S7-300之间的PN连接和设置
2.2分配IP地址
2.G120和S7-300之间的PN连接和设置
2.3设置PG/PC接口
2.G120和S7-300之间的PN连接和设置
2.3分别对CPU和驱动装置G120分配相应的网络地址 2.3.1点击编辑站点信息
2.G120和S7-300之间的PN连接和设置
2.3.2 G120的IP地址须由控制器来分配,在变频器内部可以通过参 数r61001来读取
2.G120和S7-300之间的PN连接和设置
2.3.3 确保硬件组态中的设备名称与设备已分配的设备名称一致,否 则会报通信故障
2.G120和S7-300之间的PN连接和设置
3.周期性通信数据结构
3.1 周期性通讯的报文:
参数值PWE: √当使用PROFIBUS进行数据通讯时, 参数值(PWE)是双字形式 (32位)。并且 在一个通讯报文中只能传输一个参数的 数值; √如果该参数为32位的数据类型,则会 包括PWE1(高字位,PKW的第三个字)和 PWE2(低字位,PKW的第四个字; √如果操作的参数是16位的数据类型, 则只会由PWE2 (低字位, PKW的第四个 字)来表示,此时需要在PROFIBUS DP Master 中将PWE1(高字位, PKW的第 三个字) 置为0。
通过PROFIBUS DP 实现S7-300PLC 与VACON NX系列变频器的通讯

通过PROFIBUS DP实现S7-300PLC与VACON NX系列变频器的通讯作者:美恒自动化(大连)有限公司郝晋松摘要:现代企业里,利用PROFIBUS—DP组成的工业控制网络,实现了从控制级到现场级通讯的一致。
根据笔者的实践,本文介绍了如何利用SIEMENS S7-300 PLC与V ACON NX 系列变频器通过PROFIBUS DP实现通讯。
关键词:主站从站参数过程数据(PPO)引言现场总线PROFIBUS能够满足生产过程中现场级数据的可存取性。
一方面它满足了传感器/执行器领域的通信需求,另一方面又具有单元级领域的所有网络通信功能。
PROFIBUS-DP是一种高速(数据传输速率9.6Kbps/s~12Mbps)、经济的设备级网络,主要用于现场控制器与分散I/O之间的通信,可满足交直流调速系统快速响应的时间要求。
PROFIBUS-DP的实时性远高于其他局域网,因而特别适用于工业现场。
为满足今后用户可能提出的要求,故开发通过PROFIBUS DP 实现S7-300PLC与VACON NX系列变频器的通讯。
一、硬件要求:1、CPU要求带PROFIBUS DP主站/从站接口;2、VACON NX系列变频器带NXOPTC3/C5可选接口板。
二、变频器硬件电路接线1、NXOPTC3板1)、BUS CONNECTOR/总线连接端子:1号端子:总线电缆屏蔽层接线端子;2号端子:+5V电源;3号端子发送接收端子-正(B);4号端子发送接收端子-负(A);5号端子电源地(0V)。
2)、X1为总线电缆屏蔽层接地跳线器。
共有三种方式:1)、将屏蔽层通过X1接到变频器外壳(屏蔽层接至1号端子),X1在ON位置,见左1图。
2)、将屏蔽层通过RC滤波电路接至变频器外壳。
此时,X1在OFF位置。
3)、直接将屏蔽层接至变频器壳体,见上彩图。
此时,X1可在任意位置。
4)、X6为终端电阻选择跳线器。
如果VACON NX变频器为DP网络中的最后一个子站,则X6必须设置在ON位置,否则,在OFF位置。
西门子6SE70、6RA70系列变频器与s7-300400的PROFIBUS-DP通讯举例
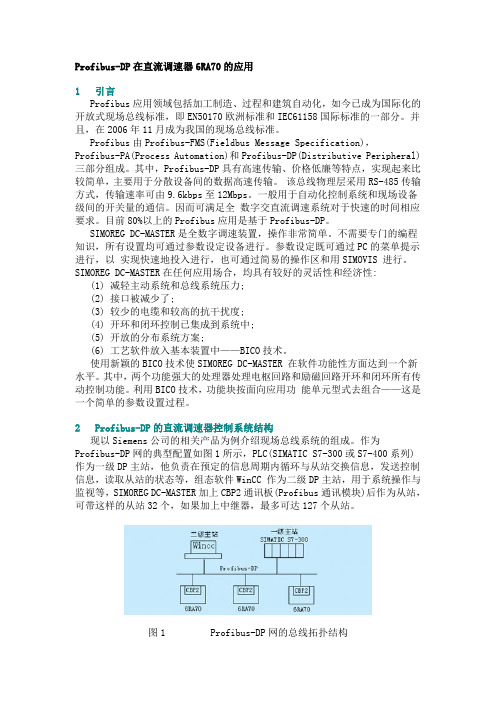
Profibus-DP在直流调速器6RA70的应用1 引言Profibus应用领域包括加工制造、过程和建筑自动化,如今已成为国际化的开放式现场总线标准,即EN50170欧洲标准和IEC61158国际标准的一部分。
并且,在2006年11月成为我国的现场总线标准。
Profibus由Profibus-FMS(Fieldbus Message Specification),Profibus-PA(Process Automation)和Profibus-DP(Distributive Peripheral)三部分组成。
其中,Profibus-DP具有高速传输、价格低廉等特点,实现起来比较简单,主要用于分散设备间的数据高速传输。
该总线物理层采用RS-485传输方式,传输速率可由9.6kbps至12Mbps。
一般用于自动化控制系统和现场设备级间的开关量的通信。
因而可满足全数字交直流调速系统对于快速的时间相应要求。
目前80%以上的Profibus应用是基于Profibus-DP。
SIMOREG DC-MASTER是全数字调速装置,操作非常简单。
不需要专门的编程知识,所有设置均可通过参数设定设备进行。
参数设定既可通过PC的菜单提示进行,以实现快速地投入进行,也可通过简易的操作区和用SIMOVIS 进行。
SIMOREG DC-MASTER在任何应用场合,均具有较好的灵活性和经济性:(1) 减轻主动系统和总线系统压力;(2) 接口被减少了;(3) 较少的电缆和较高的抗干扰度;(4) 开环和闭环控制已集成到系统中;(5) 开放的分布系统方案;(6) 工艺软件放入基本装置中——BICO技术。
使用新颖的BICO技术使SIMOREG DC-MASTER 在软件功能性方面达到一个新水平。
其中,两个功能强大的处理器处理电枢回路和励磁回路开环和闭环所有传动控制功能。
利用BICO技术,功能块按面向应用功能单元型式去组合——这是一个简单的参数设置过程。
S7-200与V20变频器之间的USS通讯资料
S7-200与V20的USS通讯1、本例程的系统配置:(1)安装Step7 Micro/Win V4.0 SP6软件和USS协议V2.3,软件下载地址:西门子标准库指令:/download/searchResult.aspx?searchText=S0010 Micro/WIN V4.0 SP6软件下载地址:/download/searchResult.aspx?searchText=S0002(2)PC/PPI电缆、S7-200、电源模块、通信电缆。
(3)V20驱动装置和一台PC机。
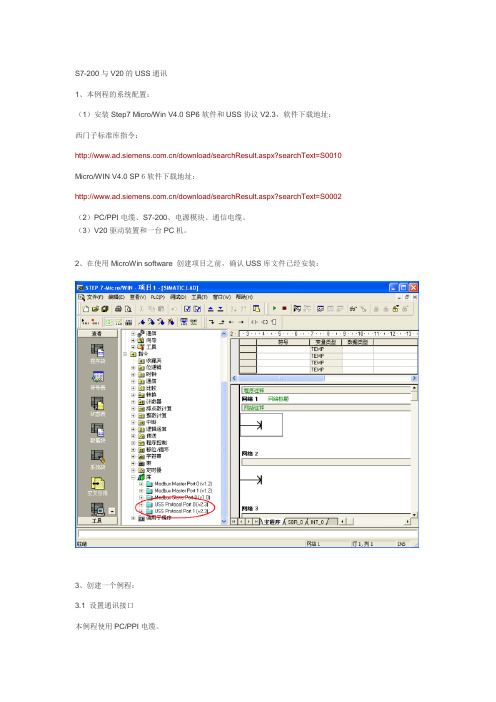
2、在使用MicroWin software 创建项目之前,确认USS库文件已经安装:3、创建一个例程:3.1 设置通讯接口本例程使用PC/PPI电缆。
3.2 建立PC和PLC之间的连接“双击刷新”搜索到PLC后,点击”确认”。
3.3 用电缆将S7-200 Port 0端口与V20的RS485接口相连(注意端口连接规则:V20的P+对3、N-对8),如下图所示:3.4 变频器参数设置:V20 可以通过选择连接宏Cn010实现USS控制,也可以通过直接更改变频器参数的方法来实现。
参数设置如下表所示:表一:参数描述Cn010默认值实际设置备注P0700[0] 选择命令源 5 5 RS485为命令源P1000[0] 选择频率 5 5 RS485为速度设定值P2023 RS485协议选择 1 1 USS协议P2010[0] USS/MODBUS波特率8 6 波特率为9600bpsP2011[0] USS地址 1 3 变频器的USS地址P2012[0] USS PZD长度 2 2 PZD部分的字数P2013[0] USS PKW长度127 127 PKW部分字数可变P2014[0] USS/MODBUS报文间断时间500 0 接收数据时间3.5 使用USS协议的初始化模块初始化S7-200的PORT0端口:EN使能:每次改变通讯状态都应该执行一次初始化指令。
使用uss协议库的s7-200与变频器通信
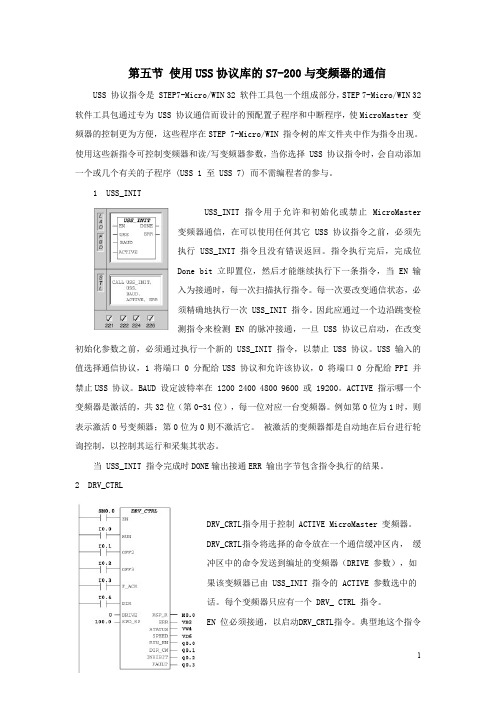
第五节使用USS协议库的S7-200与变频器的通信USS 协议指令是 STEP7-Micro/WIN 32 软件工具包一个组成部分,STEP 7-Micro/WIN 32 软件工具包通过专为 USS 协议通信而设计的预配置子程序和中断程序,使MicroMaster 变频器的控制更为方便,这些程序在STEP 7-Micro/WIN 指令树的库文件夹中作为指令出现。
使用这些新指令可控制变频器和读/写变频器参数,当你选择 USS 协议指令时,会自动添加一个或几个有关的子程序 (USS 1 至 USS 7) 而不需编程者的参与。
1 USS_INITUSS_INIT 指令用于允许和初始化或禁止 MicroMaster变频器通信,在可以使用任何其它 USS 协议指令之前,必须先执行 USS_INIT 指令且没有错误返回。
指令执行完后,完成位Done bit 立即置位,然后才能继续执行下一条指令,当 EN 输入为接通时,每一次扫描执行指令。
每一次要改变通信状态,必须精确地执行一次 USS_INIT 指令。
因此应通过一个边沿跳变检测指令来检测 EN 的脉冲接通,一旦 USS 协议已启动,在改变初始化参数之前,必须通过执行一个新的 USS_INIT 指令,以禁止 USS 协议。
USS 输入的值选择通信协议,1 将端口 0 分配给USS 协议和允许该协议,0 将端口0 分配给PPI 并禁止USS 协议。
BAUD 设定波特率在 1200 2400 4800 9600 或 19200。
ACTIVE 指示哪一个变频器是激活的,共32位(第0-31位),每一位对应一台变频器。
例如第0位为1时,则表示激活0号变频器;第0位为0则不激活它。
被激活的变频器都是自动地在后台进行轮询控制,以控制其运行和采集其状态。
当 USS_INIT 指令完成时DONE输出接通ERR 输出字节包含指令执行的结果。
2 DRV_CTRLDRV_CRTL指令用于控制 ACTIVE MicroMaster 变频器。
S7-1200与G120 CU240X-2 DP的PROFIBUS通信 第2部分周期通信读写变频器参
S7-1200与G120 CU240X-2 DP的PROFIBUS通信第2部分周期通信读写变频器参数1 G120 PROFIBUS通信功能概述SINAMICS G120第二代控制单元CU240B-2 DP、CU240E-2 DP、CU240E-2 DP F 支持基于PROFIBUS的周期过程数据交换和变频器参数访问。
> 周期过程数据交换--通过该通信PROFIBUS主站可将控制字和主设定值等过程数据周期性的发送至变频器,并从变频器周期性的读取状态字和实际转速等过程数据。
G120最多可以接收和发送8个过程数据字。
该通信使用周期性通信的PZD通道(过程数据区),变频器不同的报文类型定义了不同数量的过程数据字(PZD)。
> 变频器参数访问--提供PROFIBUS主站访问变频器参数的接口,有两种方式能够访问变频器参数:1.周期性通信的PKW通道(参数数据区):通过PKW通道主站可以读写变频器参数,每次只能读或写一个参数,PKW通道的长度固定为4个字。
2.非周期性通信:主站采用PROFIBUS-DPV1通信访问变频器数据记录区,每次可以读或写多个参数。
本文通过示例介绍S7-1200与CU240E-2 DP F的PROFIBUS PKW通信,介绍如何通过PKW通信读P2902[5]参数值、写P1121参数值。
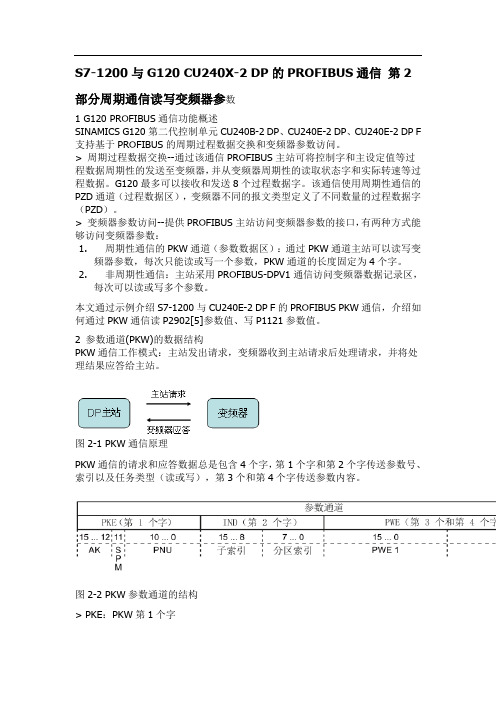
2 参数通道(PKW)的数据结构PKW通信工作模式:主站发出请求,变频器收到主站请求后处理请求,并将处理结果应答给主站。
图2-1 PKW通信原理PKW通信的请求和应答数据总是包含4个字,第1个字和第2个字传送参数号、索引以及任务类型(读或写),第3个和第4个字传送参数内容。
图2-2 PKW参数通道的结构> PKE:PKW第1个字• AK:位12~15 包含了任务ID 或应答ID,任务ID参考表2-1,应答ID参考表2-2 ;• SPM:始终为0;• PNU:参数号< 2000 PNU = 参数号。
S7-1200与G120 CU240X-2 DP的PROFIBUS通信 第3部分非周期通信读写变频器参数
S7-1200与G120 CU240X-2 DP的PROFIBUS通信第31.周期性通信的PKW通道(参数数据区):通过PKW通道主站可以读写变频器参数,每次只能读或写一个参数,PKW通道的长度固定为4个字。
2.非周期性通信:主站采用PROFIBUS-DPV1通信访问变频器数据记录区,每次可以读或写多个参数。
本文通过示例介绍S7-1200与CU240E-2 DP F的PROFIBUS 非周期通信,介绍如何通过非周期通信读写多个变频器参数。
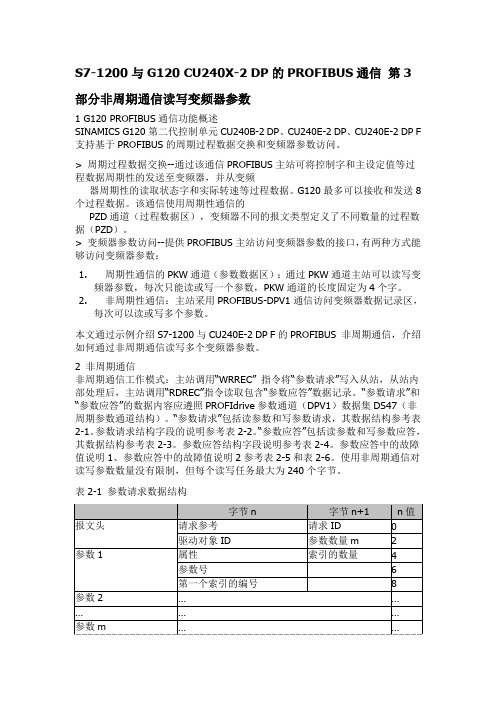
2 非周期通信非周期通信工作模式:主站调用“WRREC” 指令将“参数请求”写入从站,从站内部处理后,主站调用“RDREC”指令读取包含“参数应答”数据记录。
“参数请求”和“参数应答”的数据内容应遵照PROFIdrive参数通道(DPV1)数据集DS47(非周期参数通道结构)。
“参数请求”包括读参数和写参数请求,其数据结构参考表2-1。
参数请求结构字段的说明参考表2-2。
“参数应答”包括读参数和写参数应答,其数据结构参考表2-3。
参数应答结构字段说明参考表2-4。
参数应答中的故障值说明1、参数应答中的故障值说明2参考表2-5和表2-6。
使用非周期通信对读写参数数量没有限制,但每个读写任务最大为240个字节。
表2-1 参数请求数据结构表2-2 参数请求结构字段说明表2-3参数应答数据结构表2-4 参数应答结构字段说明44 字节字双字错误参数值数量8位无符号数00….EA说明随后的参数值的个数参数值或错误值16位无符号数0000….00FF参数值或错误时的错误号表2-5 参数应答中的故障值说明1表2-6 参数应答中的故障值说明23 S7-1200与CU240X-2 DP的PROFIBUS 非周期通信实例3.1 S7-1200组态CU240E-2 DP F非周期通信与所选择的报文结构无关,选择任何一种报文格式都可以进行非周期通信,在使用系统功能“RDREC”和“WRREC”读写变频器数据记录时需要使用报文标识符。
西门子PLC与变频器通讯手册
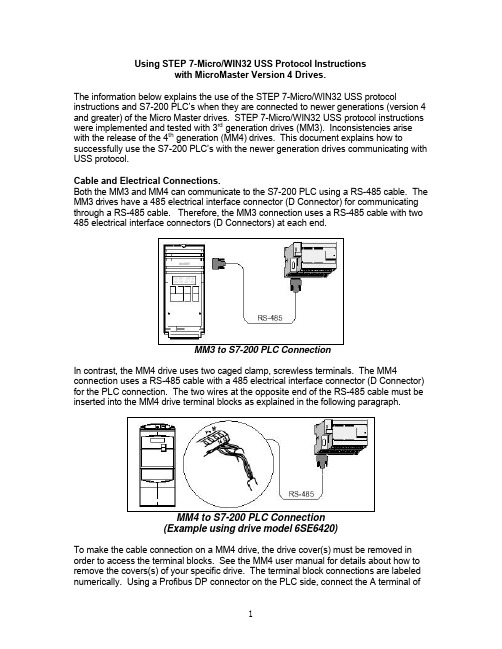
Using STEP 7-Micro/WIN32 USS Protocol Instructionswith MicroMaster Version 4 Drives.The information below explains the use of the STEP 7-Micro/WIN32 USS protocol instructions and S7-200 PLC’s when they are connected to newer generations (version 4 and greater) of the Micro Master drives. STEP 7-Micro/WIN32 USS protocol instructions were implemented and tested with 3rd generation drives (MM3). Inconsistencies arise with the release of the 4th generation (MM4) drives. This document explains how to successfully use the S7-200 PLC’s with the newer generation drives communicating with USS protocol.Cable and Electrical Connections.Both the MM3 and MM4 can communicate to the S7-200 PLC using a RS-485 cable. The MM3 drives have a 485 electrical interface connector (D Connector) for communicating through a RS-485 cable. Therefore, the MM3 connection uses a RS-485 cable with two 485 electrical interface connectors (D Connectors) at each end.MM3 to S7-200 PLC ConnectionIn contrast, the MM4 drive uses two caged clamp, screwless terminals. The MM4 connection uses a RS-485 cable with a 485 electrical interface connector (D Connector) for the PLC connection. The two wires at the opposite end of the RS-485 cable must be inserted into the MM4 drive terminal blocks as explained in the following paragraph.MM4 to S7-200 PLC Connection(Example using drive model 6SE6420)To make the cable connection on a MM4 drive, the drive cover(s) must be removed in order to access the terminal blocks. See the MM4 user manual for details about how to remove the covers(s) of your specific drive. The terminal block connections are labeled numerically. Using a Profibus DP connector on the PLC side, connect the A terminal ofthe cable to the drive terminal 15. Connect the B terminal of the cable connector to drive terminal 14.If the PLC is a terminating node in the network, or if the connection is point-to-point, it is necessary to use terminals A1 and B1 (not A2 and B2) of the connector since they allow the termination settings to be set (for example, with DP connector type 6ES7 972-0BA40-0X40). Caution: Make sure the drive covers are replaced properly before supplying power to the unit.If the drive is configured as the terminating node in the network, then termination and bias resistors must be also be wired to the appropriate terminal connections. As an example, the diagram below illustrates the connections necessary for termination and bias for the MM4, model 6SE6420 drive.Micro/WIN32 Instruction Set.All the STEP 7-Micro/WIN32 USS Protocol instructions, except READPM and WRITEPM, work with the 4th generation drives (such as MM4). READPM and WRITEPM are not functional with the 4th generation drives. See control word FAQ for further details (Please refer to last section of this document for web site address that links to MicroMaster 420 Information.). In addition, the DIR input to the DRV_CTRL instruction has been reversed for MM4 drives. With MM3 drive use: 0 = CCW, 1 = CW. With MM4 drives use: 1 = CCW, 0 = CW. Alternatively, you can use P1820 to reverse output phase sequence and then leave DRV_CTRL as normal. All other USS Protocol instructions in STEP 7-Micro/WIN32 work normally (the same as with the 3rd generation drives).Required Parameter Settings for MM4 Drive.In order to connect the S7-200 PLC to a Micro Master drive, certain parameter settings must be made to the drive. Drive settings are typically configured from the drive’s front panel buttons. Prior to making these settings, the drive must be set to the factory defaults. The following table shows the differences between MM3 and MM4 drive parameter settings.MM3 Parameter MM4 Parameter DescriptionP944 = 1 P0010=30 Reset drive to factory settings (optional)P0970=1 Reset drive to factory settings (optional)P1820=1 Reverse Output Phase Sequence (Optional) P0009 = 3 P0003 = 3 Expert Mode. Enable read/write accessP910 = 1 P0700 = 5 Enable Remote ControlP1000 = 5Select USS for frequency set point control P092 = 3/4/5/6/7 P2010 Index 0 = 6Baud rate as set in USS_INIT, i.e. 6 = 9600 P091 = 0 through 31 P2011 Index 0 = 0 to 31Default station address of 0P2012 = 2Two words for PZD (USS PZD Length)P2013 = 3Three words for PKW (USS PKW Length)Serial Link TimeoutP093 = 0 - 240 P2014 index 0 = 0-65535ms___P094 = 0 – 400.00 P2000Serial Link Nominal System Setpoint P095 = 0/1 P2009 index 0USS Compatibility (optional)P971 = 0/1 P0971EEPROM Storage ControlIMPORTANT NOTE: In a complete configuration set up, the motor settings must also be set in addition to the drive parameters. Motor settings are not provided in this document. Please consult your motor and drive documentation for the required motor parameter settings.Other differences between 3rd and 4th generation drives where STEP7-Micro/WIN32 applications may be affected.• MM3 drives have parameter numbers up to 971; MM4 drives have 3900 parameters. The USS protocol instructions in STEP 7-Micro/WIN32 will notaccess drive parameters greater than 971.• Common parameters between the MM3 and the MM4 drives are located at different addresses.• MM4 parameters can be several different data types, where the MM3 parameters used in the STEP 7- Micro/WIN32 USS Protocol can only be ‘word’ values.• In the USS control word the meaning of bits 11 and 12 have changed. In order to get the motor to run right with MM4, bit 11 should be 0 (on MM3 it was 1). To run left, bit 11 should be set to 1 (it was 0 on MM3 and bit 12 was1). Another alternative for this is to use P1820.• MM4 baud rate goes to 57.6 Kbaud, but Micro/WIN USS Instruction only allows up to 19.2K baud.Please refer to the following web site addresses for more details and FAQ’s about using USS Protocol with MM4 drives.MicroMaster 420 Information:http://www4.ad.siemens.de/csinfo/livelink.exe?func=cslib.csinfo&startNode=4000024&table=Produc tNodes&lang=en&caller=nl&open0=-547-545-538-516-548-549-&aktprim=0&nodeID0=4000803&siteid=cs&jumpto=549Standard Drives (General) Information:http://www4.ad.siemens.de:8080/csintra/livelink.exe?func=cslib.csinfo&objId=4000799&objAction=c sBrowse&lang=en&aktprim=0&nodeID0=4000781&siteid=csiGeneral Notes.The SIMATIC S7-200 FAQ’s are provided to give users of the S7-200 some indication as to how certain tasks can be solved with the S7-200 controller. This information does not purport to cover all details or variations in equipment, nor do they provide for every possible contingency.Siemens reserves the right to make changes in specifications shown herein or make improvements at any time without notice or obligation. It does not relieve the user of responsibility to use sound practices in application, installation, operation, and maintenance of the equipment purchased. Should a conflict arise between the general information contained in this publication, the contents of drawings or supplementary material, or both, the latter shall take precedence.Siemens is not liable, for whatever legal reason, for damages or personal injury resulting from the use of the application tips.All rights reserved. Any form of duplication or distribution, including excerpts, is only permitted with express authorization by SIEMENS.。
S7-300与G120变频器通信

G120与S7-300通讯自动单元功率等级为0-2.5KW 输入电压为380V,黑色那部分代表是订单号和输入电压和电机功能为0.37KW 上面的第一个功率是代表最大的范围,完成后点击保存,点击连接设备,出现以下设置,选择连接的设备G120,并选择S7ONLINE,注意如果连接不上,看G120变频器没有设置IP地址或者地址被清除那么我们得从新设置,从以下地方设置选择以上这个窗口,在这里我们自己设置一个IP和子网在分配下IP,并且把设备名称设置与CU250S-2相同在分配,在下载,这样就可以在点击变会成功。
这里的IP 有CPU地址G120变频器地址,以及网络接口的地址,三者同一网段,地址不同就可以。
在点击下载,弹出下面的窗口,这个是冗余存储器是,我们这里没这里没这个卡所以不同点击。
下载时出现这个完成后,点击离线模式,测试报文,打开PROFINET选择常用的PZD和PKW格式,在点击,在点击在线和下载把刚在的修改的报文353下载进去,这个353其实可以在在线连接变频器之前的设置好和通讯连接一起下载的,不需要分2次下载。
回到硬件中打开这个属性,出现以下窗口选择353的报文格式,虽然这里显示的是354 但是我们确定后就会看出是353 256到267 刚好12个字节,对应6个字,PZD 2 PKW 4,修改后点击编译,在下载。
完成后,以下是程序部分:先建立一个数据块,设置发送和接受给6个字,因为发送控制命令需要2个字,发送读或者修改参数的需要4个字,接受的也一样PZD占用后面的2个字,PKW占用前4个字,所以这里DB1.DBW8开始是控制字,DB1.DBW10是频率,在把程序和DB块下载进去,在建立变量表以上是控制字启动与停止,先输入16#047E停止信号,在输入启动正转信号16#047F,在来选择频率,频率我们打开SCOUNT中的参数表找到P2000这个参数,参数值是1500RPM,那么程序中中我们设置16#4000对应的1500RPM现在把16#047F和频率同时输入PLC 当然不同时也没事,一切顺利的话就可以通讯,如果电机有频率不转,那么我们可以把程序和硬件重新下载,下载后PLC报警没事,等稳定后,断电上电就好,SCOUNT软件也重新下载,在启动看是否能启动,在不行的话,把PLC和G120变频器重新断电在上电,在发送停止,在发送启动,正常情况下就可以启动了,在不行的话就把变频器恢复出厂值了。
西门子S7-300与G120变频器PN通讯

西门子S7-300与G120变频器PN通讯
1 系统要求PC 机:安装STEP7 和Starter 软件G120 装置:选择支持PROFINET 的控制单元,CU240S PN 或CU240S PN F S7-300 机架:需要选择
支持PROFINET 的CPU,本实验使用CPU317-2DP/PN PROFINET 连接电缆网
络连接如下图所示:
2 G120 和S7-300 之间的PN 连接和设置
2.1 设置通讯接口
选择TCP/IP 接口
分配IP 地址
2.2 设置PG/PC
2.3 分别对CPU 和驱动装置G120 分配相应的网络地址
点击Edit Ethernet Node 编辑站点信息
G120 的IP 地址须由控制器来分配,在变频器内部可以通过参数r61001 来读取
确保硬件组态中的Device name 与设备已分配的Device name 一致,否则CPU 会报通讯故障tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
西门子S7200与变频器MODBUS通讯实例详解

西门子S7200与变频器MODBUS通讯实例详解西门子S7200PLC简介西门子S7-200PLC在实时模式下具有速度快,具有通讯功能和较高的生产力的特点。
一致的模块化设计促进了低性能定制产品的创造和可扩展性的解决方案。
来自西门子的S7- 200微型PLC可以被当作独立的微型PLC解决方案或与其他控制器相结合使用。
Modbus通讯协议简介Modbus是由Modicon(现为施耐德电气公司的一个品牌)在1979年发明的,是全球第一个真正用于工业现场的总线协议。
ModBus网络是一个工业通信系统,由带智能终端的可编程序控制器和计算机通过公用线路或局部专用线路连接而成。
其系统结构既包括硬件、亦包括软件。
它可应用于各种数据采集和过程监控。
ModBus网络只有一个主机,所有通信都由他发出。
网络可支持247个之多的远程从属控制器,但实际所支持的从机数要由所用通信设备决定。
采用这个系统,各PC可以和中心主机交换信息而不影响各PC执行本身的控制任务。
1MODBUSRTU协议在S7-200中的应用原理1.1MODBUSRTU协议与S7-200相互关系简介S7-200CPU上的通讯口Port0可以支持MODBUSRTU协议,成为MODBUSRTU从站。
此功能是通过S7-200的自由口通讯模式实现,因此可以通过无线数据电台等慢速通讯设备传输。
想在S7-200CPU与其他支持MODBUSRTU的设备使用MODBUSRTU协议通讯,需要由有S7-200CPU做MODBUS主站。
S7-200CPU做主站必须由用户自己用自由口模式,按相关协议编程。
2从站指令的用法:S7-200控制系统应用中,MODBUSRTU从站指令库只支持CPU上的通讯0口(Port0)。
要实现MODBUSRTU通讯,需要Step7-Micro/WIN32V3.2以上版本的编程软件,而且须安装Step7-Micro/WIN32V3.2InstructionLibrary(指令库)。
【案例】S7-200SMARTPLC与台达变频器MODBUS通信

【案例】S7-200SMARTPLC与台达变频器MODBUS通信↖戳上⽅蓝字 "PLC发烧友” 关注我们哦!1、控制要求I0.0启动变频器正转,I0.1启动变频器反转,I0.2停⽌变频器,PLC通过MODBUS通讯读取台达变频器当前电流和当前电压。
2、变频器参数变频器参数的通信地址是2000H,Modbus通信功能码是0(离散量输出)1(离散量输⼊)、3(输⼊寄存器)、4(保持寄存器)。
⽽这⾥的2000H指的就是4(保持寄存器)同时这个2000H是⼗六进制数2000,在软件中输⼊的是⼗进制数,故需要将⼗六制数2000 转换为⼗进制数,得到8192。
另外Modbus 的通信地址都是从1开始的。
故还要将8192加上1为8193,最终得到的变频器地址为“48193”。
在控制命令2000H 的地址中,每个位置的含义已经定义好了,Bit2-3和Bit6-15保留,即为0,Bit0-1和Bit4-5表⽰启动及运⾏⽅向,若电动机以反向点动运⾏,则Bit0-1设置为11,1, Bit4-5设置为10,最终得到2#10011。
将2#10011 通过通信传输到变频器的2000H中,变频器将会按照设定的⽅式⼯作。
上表中的2102H频率指令(F)( ⼩数2位)中,⼩数2位的含义是指:频率范围是00.00 -50.00Hz,频率是⼀个实数,但是⼀个实数占⽤32位,Modbus通信的保持寄存器区每次通信的单位是字,并不能直接传输⼩数。
因此在通信过程中我们读到的频率信息是放在两个字⾥边的,第⼀个字中存储的是⼀个 4位⼗进制数,例如0612,但是我们都知道,频率并没有0612Hz,我们还要读取第⼆个字中的值,第⼆个字中的值表⽰⼩数点的位数,例如2,表⽰⼩数的位数为2位,,因此当前的运⾏频率表⽰为06.12Hz,这才是我们真正读到的频率值。
3、PLC程序I/O分配表4、编写程序第⼀步:(上电初始化将完成标志位M点全部复位,同时将运⾏频率30HZ传送给VW100)第⼆步:(按下I0.0命令值写⼊VW200变频器电机正转、按下I0.1命令值写⼊VW200变频器电机反转、按下I0.2命令值写⼊VW200变频器电机停⽌)第三步:(通信初始化指令,设置通信波特率9600,偶校验,通信端⼝0,通信超时100MS)第四步:(SM0.1⾸次接通写⼊变频器频率指令,M0.4⽤轮询⽅式循环写⼊频率,VW100的频率值写⼊变频器当中,写⼊完成后M0.1接通)第五步:(M0.1接通后,复位M0.4断开写⼊频率指令)第六步:(M0.1接通写⼊变频器运⾏指令,VW200中频率值写⼊变频器当中,写⼊完成后M0.2接通)第七步:(M0.2接通后,复位M0.1断开写⼊运⾏指令)第⼋步:(M0.2接通读取变频器频率指令,读取变频器频率值存放在VW300当中,读取完成后M0.3接通)第九步:(M0.3接通后,复位M0.2断开读取频率指令)第⼗步:(M0.3接通读取变频器电流指令,读取变频器电流值存放在VW400当中,读取完成后M0.4接通)第⼗⼀步:(M0.4接通后,复位M0.3断开读取电流指令)此时此刻S7-200SMART PLC与台达变频器MODBUS通信已编写完成,⼤家都理解并且掌握了吗?可以在上述⽂章找答案!。
西门子与台达变频器通讯

西门子与台达变频器通讯ORGANIZA TION_BLOCK 主程序:OB1TITLE=实现S7-200 PLC与台达变频器通信// 实现功能是PLC通过RS485通信控制变频器的正转启动、反转启动、停止、加速、减速和读取输出频率。
变频器通过Modbus通信方式进行// 要求台达变频器设置基本通信参数:// P00=d03(主频率由RS485控制)// P01=d03(运转/停止由RS485通信控制)// P88=d01(站点定义为1号站)// P90=d00 P91=d00 P92=d02 P113=d01// (其他参数都是出厂默认值,可根据实际情况调节)//BEGINNetwork 1LD SM0.1CALL SBR0Network 2 // 正转启动命令LD M10.0EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#31, VB112MOVB 16#32, VB113CALL SBR1Network 3 // 反转启动指令LD M10.1EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#32, VB112MOVB 16#32, VB113CALL SBR1Network 4 // 停止指令LD M10.2EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113CALL SBR1Network 5 // 1秒脉冲LDN T37TON T37, 10Network 6 // 加速指令(每1秒步进加速0.01Hz)LD M10.3A T37INCW VW135Network 7 // 减速指令(每1秒步进减速0.01Hz)LD M10.4A T37DECW VW135Network 8 // 上限频率50.00HzLDW>= VW135, 5000MOVW 5000, VW135Network 9 // 下限频率0.1HzLDW<= VW135, 10MOVW 10, VW135Network 10 // 凡有频率改变,调用子程序3 LDW<> VW135, VW145O SM0.1CALL SBR3Network 11 // 读取输出频率指令LD M10.5EUMOVB 16#30, VB104MOVB 16#33, VB105MOVB 16#32, VB106MOVB 16#31, VB107MOVB 16#30, VB108MOVB 16#33, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113S M20.0, 1CALL SBR1Network 12 // 当读取频率时,执行频率显示运算子程序LD SM4.5A M20.1CALL SBR2Network 13 // SMB86=0表示正在接收,但本例是利用中断来接收LDB<> SMB86, 0MOVB SMB86, VB400Network 14 // 发送完成标志LD SM4.5= Q0.0END_ORGANIZA TION_BLOCKSUBROUTINE_BLOCK SBR_0:SBR0TITLE=通信初始化参数子程序BEGINNetwork 1 // 初始化通信参数及定义开始符、终止符等接收信息LD SM0.0MOVB 16#69, SMB30MOVB 16#E0, SMB88MOVB 16#3A, SMB89MOVB 18, SMB94Network 2 // 初始化固定参数LD SM0.0MOVB 16#3A, VB101MOVB 16#30, VB102MOVB 16#31, VB103MOVB 16#0D, VB116MOVB 16#0A, VB117Network 3 // 声明使用发送完成中断LD SM0.0A TCH INT0, 9ENIEND_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_1:SBR1TITLE=计算校验及子程序BEGINNetwork 1 // 建立指针及参数清零等初始化LD SM0.0MOVD &VB101, VD131MOVW 0, VW129MOVW 6, VW127MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3Network 2 // 循环计算原始累加和LD SM0.0FOR VW125, 1, VW127 Network 3LD SM0.0LPSMOVW *VD131, AC0ANDW 16#FF, AC0AB> AC0, 16#39MOVW AC0, AC1-I 16#37, AC1LRDAB<= AC0, 16#39MOVW AC0, AC1-I 16#30, AC1LRDINCD VD131LRDMOVW *VD131, AC0ANDW 16#FF, AC0LRDAB> AC0, 16#39MOVW AC0, AC2-I 16#37, AC2LRDAB<= AC0, 16#30MOVW AC0, AC2-I 16#30, AC2LRDSLB AC1, 4LRDMOVW AC1, AC3+I AC2, AC3LRD+I AC3, VW129LPP+D 1, VD131Network 4NEXTNetwork 5 // 指针加一,指向下一个LD SM0.0MOVW 0, AC2MOVW 0, AC3+D 1, VD131Network 6LD SM0.0LPSMOVW 16#FF, AC0ANDW VW129, AC0INVW AC0MOVW 1, VW800+I AC0, VW800MOVB VB801, AC2SRB AC2, 4A W> AC2, 9+I 16#37, AC2LRDMOVB AC2, *VD131LRD+D 1, VD131LRDMOVB VB801, AC3ANDB 16#0F, AC3LRDA W> AC3, 9+I 16#37, AC3LRDA W<= AC3, 9+I 16#30, AC3LPPMOVB AC3, *VD131Network 7 // 发送前,强行禁止接收LD SM0.0MOVB 16#70, SMB87RCV VB200, 0Network 8 // 开始发送LD SM0.0MOVB 17, VB100XMT VB100, 0FILL 0, VW200, 9Network 9 // 发送后允许接收LD SM0.0MOVB 16#F0, SMB87END_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_2:SBR2TITLE=频率显示运算子程序V ARLIN1:DWORD;lLIN2:DWORD;LIN3:DWORD;LIN4:DWORD;END_V ARBEGINNetwork 1 // 把接收到的16进制ASCII码信息,转换成习惯的小数点形式LD SM0.0BTI VB2008, LW0BTI VB2009, LW2BTI VB2010, LW4BTI VB2011, LW6Network 2LD SM0.0LPSA W> LW0, 16#40MOVW LW0, AC0-I 16#37, AC0LPPA W< LW0, 16#40MOVW LW0, AC0-I 16#30, AC0Network 3LD SM0.0LPSA W> LW2, 16#40MOVW LW2, AC1-I 16#37, AC1LPPA W< LW2, 16#40MOVW LW2, AC1-I 16#30, AC1Network 4LD SM0.0LPSA W> LW4, 16#40MOVW LW4, AC2-I 16#37, AC2LPPA W< LW4, 16#40MOVW LW4, AC2-I 16#30, AC2Network 5LD SM0.0LPSA W> LW6, 16#40MOVW LW6, AC3-I 16#37, AC3LPPA W< LW6, 16#40MOVW LW6, AC3-I 16#30, AC3Network 6LD SM0.0MOVB AC0, LB8SLB LB8, 4MOVB AC2, LB9SLB LB9, 4Network 7LD SM0.0MOVB LB8, VB3200ORB AC1, VB3200Network 8LD SM0.0MOVB LB9, VB3201ORB AC3, VB3201Network 9LD SM0.0ITD VW3200, VD3300DTR VD3300, VD3304MOVR VD3304, VD3308/R 100.0, VD3308Network 10LD SM0.0R M20.1, 1END_SUBROUTINE_BLOCK SUBROUTINE_BLOCK SBR_3:SBR3 TITLE=输出频率通信格式整理子程序BEGINNetwork 1 // 凡是有输出频率,频率改变LD SM0.0MOVB 16#30, VB104 MOVB 16#36, VB105 MOVB 16#32, VB106 MOVB 16#30, VB107 MOVB 16#30, VB108 MOVB 16#31, VB109 MOVW VW135, VW137 MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3 Network 2LD SM0.0LPSMOVB VB137, AC0 ANDB 16#0F, AC0A W> AC0, 9+I 16#37, AC0LRDA W<= AC0, 9+I 16#30, AC0LRDITB AC0, VB111LRDMOVB VB138, AC1 ANDB 16#0F, AC1 LRDA W> AC1, 9+I 16#37, AC1LRDA W<= AC1, 9+I 16#30, AC1LPPITB AC1, VB113 Network 3LD SM0.0LPSMOVW VW137, VW139 SRW VW139, 4 MOVB VB139, AC2 ANDB 16#0F, AC2A W> AC2, 9+I 16#37, AC2LRDA W<= AC2, 9+I 16#30, AC2LRDITB AC2, VB110LRDMOVB VB140, AC3ANDB 16#0F, AC3LRDA W> AC3, 9+I 16#37, AC3LRDA W<= AC3, 9+I 16#30, AC3LRDITB AC3, VB112LRDMOVW VW135, VW145LPPCALL SBR1END_SUBROUTINE_BLOCK INTERRUPT_BLOCK INT_0:INT0TITLE=发送完成中断程序BEGINNetwork 1 // 除读取频率其他指令返回信息LD M20.0RCV VB200, 0Network 2 // 读取频率返回信息LD M20.0RCV VB2000, 0S M20.1, 1R M20.0, 1END_INTERRUPT_BLOCK。
西门子变频器基本参数设置

西门子变频器基本参数设置预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置)P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸)P115=4 电机模型空载测量(按下P键后,20S之内合闸)6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
西门子S7_200PLC与台达变频器的通讯控制与应用

西门子工业控制产品在国际市场上有很高的市场占有率, 功能也 比较强大。西门子 S7- 200 系列 PLC 是 SIMATIC 家族中小规模的紧凑 型 PLC。其通讯口的配置情况如下图 1 和表 1 所示:
3.台达变频器通讯介绍 下面以台达 VFD- B 系列台达变频器来介绍, 该系列变频器硬件 通讯接口如图 2 所示, 需要设置的主要通讯参数如表 3 所示。
4.1 系统整体配置, 见图 3
能码和变频器参数寄存器的地址, 程序稍加跳转及修改, 就可以使变 频器得到有效的控制, 例如: 可以改变变频器的频率, 正传/反转, 加速/ 减速时间等; 而且可以极为方便的获取变频器当前的状态, 例如变频 器 当 前 的 电 压 , 电 流 , 报 警 状 态 等 , 把 这 些 状 态 传 送 至 HMI 就 可 以 直 观地显示出来, 而不必我们通过手册及繁琐的按键来检查变频器的状 态。当控制多台变频器时, 只要改变您要控制的变频器的通讯地址就 可以了。这种控制方案已经在我公司的多种包装机械中得到应用, 不 但节约了成本, 而且极大地减少了线路连接的复杂性, 产生了非常明 显的经济效益! 科
在我公司的饼干生产线设备上, 我利用 S7- 200 PLC 和台达变频 器的通讯功能来控制主轴电机的速度, 变频器的频率及变频器的启 动/停止通过触摸屏 HMI 来实现, 触摸屏与 S7- 200 PLC 之间的通讯通 过 HMI 连 接 至 S7- 200 PLC PORT1 口 的 通 讯 电 缆 实 现 , S7- 200 PLC 与 VFD- B 变频器之间的通讯, 通过连接 CPU226 PORT2 口至变频器 RS485 口的通讯电缆实现。
(4)导线接头包扎, 应先用橡胶带或黄蜡带( 塑料带也可以) 用力紧 缠两层, 然后用黑胶布或自粘性塑料带缠两层, 包扎要紧密坚实, 使绝 缘带牢固粘在一起, 防潮气侵入。
S7-1200与变频器通信
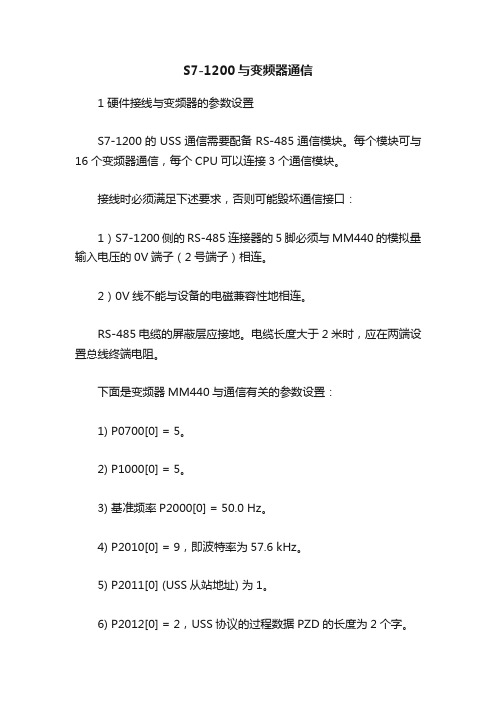
S7-1200与变频器通信1 硬件接线与变频器的参数设置S7-1200的USS通信需要配备RS-485通信模块。
每个模块可与16个变频器通信,每个CPU可以连接3个通信模块。
接线时必须满足下述要求,否则可能毁坏通信接口:1)S7-1200侧的RS-485连接器的5脚必须与MM440的模拟量输入电压的0V端子(2号端子)相连。
2)0V线不能与设备的电磁兼容性地相连。
RS-485电缆的屏蔽层应接地。
电缆长度大于2米时,应在两端设置总线终端电阻。
下面是变频器MM440与通信有关的参数设置:1) P0700[0] = 5。
2) P1000[0] = 5。
3) 基准频率P2000[0] = 50.0 Hz。
4) P2010[0] = 9,即波特率为57.6 kHz。
5) P2011[0] (USS从站地址) 为1。
6) P2012[0] = 2,USS协议的过程数据PZD的长度为2个字。
7) P2013[0] = 4,USS协议的参数标示符PKW的长度为4个字。
2 S7-1200的组态与编程组态时将RS-485模块拖放到CPU左边的101号槽。
1.USS_ DRV指令在主程序OB1中调用功能块USS_DRV(FB1071,见下图)来控制变频器。
应为每个变频器调用一次USS_DRV,调用时需要指定功能块的背景数据块。
同一个USS网络的USS_DRV、USS_PORT、USS_RPM和USS_WPM指令共享该数据块。
该指令各参数的意义见在线帮助,下面只介绍编程时需要重点注意的参数。
参数DRIVE(变频器的USS地址,1~16)应与变频器的参数P2011[0]相同。
PZD_LEN是PLC与变频器通信的过程数据PZD的字数,采用默认值2。
实数SPEED_SP是用组态的基准频率(P2000[0])的百分数表示的频率设定值。
实数SPEED是以组态的基准频率的百分数表示的变频器输出频率的实际值。
2.USS_PORT指令USS_PORT(FC1070)指令是S7-1200和变频器USS通信的接口。