人工智能机器人 ROS 搭建手册
机器人操作系统的开发教程
机器人操作系统的开发教程机器人操作系统(ROS)是一个开源的软件平台,旨在帮助开发者构建灵活、可重用和可扩展的机器人应用程序。
ROS提供了一系列工具、库和约定,使开发者能够更高效地构建、测试和部署机器人系统。
本文将介绍机器人操作系统的开发教程,帮助您更好地理解和应用ROS。
第一部分:ROS基础1. 安装和配置ROS在开始使用ROS之前,您需要在计算机上安装和配置ROS。
首先,根据您的操作系统版本选择合适的ROS版本进行下载和安装。
安装完成后,还需要进行ROS的初始化配置,包括设置ROS环境变量、创建工作空间等操作。
2. 创建ROS包和节点ROS的基本单位是包(package)和节点(node)。
包是ROS软件的组织单位,而节点是执行特定任务的进程。
您可以使用命令行工具或GUI工具创建ROS包和节点,然后在包内编写节点代码。
3. ROS通信机制ROS使用发布-订阅(publish-subscribe)模式进行节点间的通信。
您可以使用ROS提供的消息机制定义消息类型,并使用发布者(publisher)将消息发布到特定的主题(topic)上,然后使用订阅者(subscriber)从相应的主题上接收消息。
这种松耦合的通信机制使得节点之间的数据交换更加灵活和可扩展。
第二部分:ROS进阶1. ROS消息和服务在ROS中,消息(message)用于节点之间传递的数据结构定义,而服务(service)则用于节点之间的请求和响应机制。
您可以根据需要自定义消息和服务类型,并在编写节点代码时使用相应的消息和服务。
2. ROS参数服务器ROS提供了参数服务器(parameter server)作为一个全局的参数存储和共享机制。
您可以在这个参数服务器上存储和获取各种参数,并在节点间进行传递。
参数服务器的使用可以让您的节点更加灵活和可配置。
3. ROS包管理器ROS提供了包管理器(package manager)作为软件依赖和安装管理的工具。
机器人操作系统(ROS)进阶开发指南

机器人操作系统(ROS)进阶开发指南机器人操作系统(ROS)进阶开发指南机器人操作系统(ROS)是一个开源的、灵活的、广泛应用于机器人开发的操作系统。
它提供了一系列工具和库,方便开发者进行机器人软件的编写和测试。
本文将为您介绍ROS的进阶开发指南,帮助您更加深入地理解和应用ROS。
一、ROS基础知识1.1 ROS的基本概念ROS包括节点(Node)、话题(Topic)和服务(Service)等基本概念。
节点是ROS中最基本的执行单元,可以是一个独立的进程或者线程;话题是节点之间传递消息的通道;服务则是节点之间进行请求和响应的接口。
1.2 ROS的安装和配置您可以从ROS官方网站下载适用于您的操作系统的ROS安装包,并按照官方指引进行安装和配置。
在安装完成后,您还需要设置ROS的环境变量,以便系统能够正确识别ROS相关的命令和库。
1.3 ROS的常用工具ROS提供了众多实用的工具,方便开发者进行ROS程序的开发和调试。
常用的工具包括roslaunch、rqt、rviz等,它们分别用于启动多个节点、可视化数据、调试ROS程序等。
二、ROS进阶开发2.1 创建自定义消息ROS允许开发者根据自己的需求定义和使用自定义消息。
您可以使用ROS提供的消息描述文件编写自定义消息的结构,并通过消息生成工具生成对应的源代码。
定义好的消息可以用于话题、服务等不同的通信方式。
2.2 编写ROS节点在ROS中,节点是实际执行任务的单位。
您可以按照节点的功能和任务划分,编写独立的ROS节点。
节点之间可以通过话题进行通信,共享数据和信息。
2.3 使用ROS服务与话题不同,ROS服务是一种点对点的通信方式。
节点可以通过提供服务来接收请求,并返回相应的结果。
您可以使用ROS提供的服务定义文件编写服务的接口,并根据需要实现具体的服务功能。
2.4 使用ROS动作ROS动作(Action)是一种更为复杂的通信方式,用于处理长时间运行的任务。
机器人操作系统的开发与调试教程

机器人操作系统的开发与调试教程机器人操作系统(Robotic Operating System,ROS)是一个开源的、灵活的操作系统,专为机器人开发而设计。
它提供了一系列的工具、库和软件函数,用于帮助开发者创建、部署和管理机器人应用程序。
本文将介绍机器人操作系统的开发与调试教程,帮助读者快速上手ROS,并解决遇到的常见问题。
一、ROS的安装与配置1. 安装ROS首先,我们需要在开发机上安装ROS。
根据操作系统的不同版本,选择相应的ROS版本进行安装。
ROS官方网站提供了详细的安装教程和支持的操作系统版本列表。
我们可以按照教程依次执行命令,完成ROS的安装。
2. 配置工作空间安装完成后,我们需要创建一个ROS工作空间(Workspace)作为开发的基础。
在终端中执行以下命令:```$ mkdir -p ~/catkin_ws/src$ cd ~/catkin_ws/$ catkin_make```二、ROS的开发流程1. 创建ROS包在ROS中,我们使用包(Package)来组织和管理我们的代码。
执行以下命令来创建一个ROS包:```$ cd ~/catkin_ws/src$ catkin_create_pkg my_package std_msgs rospy roscpp```这个命令会在`~/catkin_ws/src`目录下创建一个名为`my_package`的包,并且指定了`std_msgs`、`rospy`和`roscpp`这三个依赖项。
2. 编写ROS节点ROS节点是ROS中最基本的执行单元,用于实现特定的功能。
在`my_package`包中创建一个新目录`scripts`,然后在该目录下创建一个Python文件`my_node.py`,编写自己的ROS 节点代码。
3. 编译运行在完成节点的编写后,我们需要将ROS包编译为可执行文件,并运行它。
在终端中执行以下命令:```$ cd ~/catkin_ws$ catkin_make$ source devel/setup.bash$ rosrun my_package my_node.py```三、ROS调试技巧与工具1. 使用ROS调试器(rqt)ROS提供了一个强大的调试器rqt,可用于监测和分析ROS系统的状态、消息和节点间的通信。
ROS操作步骤范文

ROS操作步骤范文ROS(机器人操作系统)是一个开源的、灵活的机器人软件平台,它提供了一系列工具和库,用于帮助开发者构建机器人应用程序。
以下是ROS操作的一般步骤:1.安装ROS:2.创建工作空间:一旦ROS安装完成,你需要创建一个ROS的工作空间。
工作空间是你存放ROS包的目录。
使用以下命令在终端中创建一个工作空间:$ mkdir -p ~/catkin_ws/src$ cd ~/catkin_ws/$ catkin_make3.创建包和节点:ROS使用包(package)和节点(node)的概念来组织软件功能。
一个包可以包含一个或多个节点。
使用以下命令在终端中创建一个包:$ cd ~/catkin_ws/src$ catkin_create_pkg my_package roscpp std_msgs4.编写和编译代码:创建包成功后,你可以在包的目录下编写你的代码。
ROS使用C++和Python作为主要的编程语言。
使用ROS提供的库和接口,你可以方便地与ROS系统中的其他部分进行通信。
编写代码后,你需要编译它们。
使用以下命令在终端中编译代码:$ cd ~/catkin_ws$ catkin_make5.运行ROS核心:ROS核心(ROS Core)是ROS系统的关键组件,它提供了ROS节点之间的通信和调度功能。
你需要在终端中运行ROS核心以启动ROS系统。
使用以下命令在终端中运行ROS核心:$ roscore6.运行节点:在ROS系统中,你可以同时启动多个节点,它们可以相互通信和协作。
使用以下命令在终端中运行一个节点:$ rosrun package_name node_name7.节点之间的通信:ROS提供了一种称为消息(message)的机制,用于节点之间的通信。
消息是一种结构化的数据类型,可以在节点之间传输。
你可以定义自己的消息类型,并使用ROS提供的工具生成代码。
节点可以通过发布(publish)和订阅(subscribe)消息来实现通信。
机器人操作系统(ROS)进阶开发指南

机器人操作系统(ROS)进阶开发指南机器人操作系统(ROS)进阶开发指南随着科技的不断进步,机器人技术已经逐渐渗透到我们的日常生活中。
而作为机器人开发的核心工具之一,机器人操作系统(ROS)在机器人行业中扮演着非常重要的角色。
本文将为大家介绍ROS的基本概念以及进阶开发指南,帮助读者更好地利用ROS来开发机器人应用。
ROS是一个灵活且强大的机器人开发平台,它提供了一系列的工具和库,用于构建机器人软件。
ROS的设计理念是模块化和分布式的,它允许开发人员将系统分解为一个个独立的节点,每个节点可以负责不同的任务。
这种模块化的设计使得机器人的开发更加灵活和可扩展。
在使用ROS进行机器人开发之前,首先需要了解ROS的基本概念。
ROS中最重要的概念之一是节点(Node)。
节点是ROS中最基本的单位,它可以是一个独立的进程,负责完成某个特定的任务。
节点之间通过消息(Message)进行通信,消息可以是传感器数据、控制命令等。
此外,ROS还提供了一种名为服务(Service)的通信方式,用于节点之间的请求和响应。
了解了ROS的基本概念后,我们可以进一步学习ROS的进阶开发指南。
首先,需要掌握ROS的安装和配置。
ROS支持多种操作系统,例如Ubuntu、Fedora等。
安装ROS的过程相对简单,可以通过官方网站提供的安装指南进行操作。
安装完成后,还需要进行一些必要的配置,例如设置ROS环境变量等。
在安装和配置完成后,我们可以开始编写ROS程序。
ROS使用一种称为ROS消息通信库(ROS Message Passing)的机制来实现节点之间的通信。
通过定义适当的消息类型,可以实现传感器数据的采集、信息的传递等功能。
在编写ROS程序时,可以使用ROS提供的编程语言,例如C++和Python。
根据项目需求,选择合适的语言进行开发。
除了编写ROS程序,还需要学习如何使用ROS的工具和库来方便地开发机器人应用。
ROS提供了丰富的工具和库,用于控制机器人的运动、感知环境、进行导航等。
机器人操作系统的搭建与应用实践
机器人操作系统的搭建与应用实践近年来,随着人工智能技术的快速发展,机器人逐渐成为人们生活中的重要伙伴。
机器人操作系统(Robot Operating System,ROS)作为一种开源的操作系统框架,为机器人的搭建、开发和应用提供了有力的支持。
本文将介绍机器人操作系统的搭建过程,并探讨其在不同领域的应用实践。
一、机器人操作系统的搭建1. ROS的安装与配置首先,我们需要在计算机中安装ROS。
ROS支持多种操作系统,包括Linux、Windows和macOS等。
在安装ROS之前,需先确定操作系统的版本,并按照官方文档提供的安装指南进行相应的配置。
2. ROS的核心功能ROS的核心功能包括通信、消息传递、软件包管理和硬件抽象等。
通信机制是ROS的重要特性,它基于发布订阅模型,使得不同节点之间能够进行消息传递和数据共享。
此外,消息传递机制使得不同节点能够交换和处理数据,实现机器人的协同工作。
3. ROS的节点和包在ROS中,节点是基本的计算单元,它可以是一个执行特定任务的进程,例如传感器读取、运动控制等。
节点之间通过消息进行通信。
而包是ROS中的基本软件单元,它包含了一组相关节点、库、配置文件和依赖项等。
4. ROS的交互工具ROS提供了一系列交互工具,可以方便地与机器人进行交互和监控。
其中,RViz是ROS的三维可视化工具,可以实时地显示机器人的状态和环境信息。
此外,ROS还提供了Gazebo仿真环境,可以帮助开发者进行机器人行为模拟和测试。
二、机器人操作系统的应用实践1. 机器人导航与定位机器人导航与定位是机器人领域的重要应用之一。
借助ROS的导航栈,我们可以实现机器人在已知地图中自主导航的功能。
该导航栈提供了实时的定位、地图构建和路径规划等功能,可以使机器人准确地感知环境并规划安全的路径。
2. 机器人视觉与感知机器人视觉与感知技术在无人驾驶、工业自动化和智能家居等领域具有广泛的应用。
ROS中的视觉工具箱(vision toolbox)提供了各种常用的视觉算法,如目标检测、运动估计和图像识别等,可用于机器人的视觉感知和环境理解。
机器人操作系统ROS的安装与应用开发指南

机器人操作系统ROS 的安装与应用开发指南机器人操作系统(Robot Operating System,ROS) 是一个开源的、灵活的机器人软件平台,它被广泛应用于机器人研发领域。
ROS 提供了一系列的工具和库,帮助开发者构建机器人应用程序。
本文将为您介绍R OS 的安装方法和应用开发指南,帮助您快速入门ROS 的世界。
一、ROS 的安装方法1.确认操作系统:ROS 可以运行在多种操作系统上,包括Ubuntu、Debian、Fedora等。
确保您的操作系统版本符合ROS 的要求。
2.安装R OS: 您可以通过命令行或者G UI 的方式安装R OS 。
以Ubuntu 为例,可以使用以下命令安装ROS:1sudo apt-get updatesudo apt-get install ros-<distro>-desktop-full其中,<distro> 代表您所选择的ROS 版本,如Kinetic 、Melodic 等。
3.初始化R OS 环境:安装完成后,需要初始化ROS 环境。
可以通过以下命令完成初始化:source /opt/ros/<distro>/setup.bash4.配置ROS 工作空间:ROS 提供了工作空间(workspace) 的概念,方便用户组织和管理开发项目。
可以通过以下命令创建并配置工作空间:mkdir -p~/catkin_ws/srccd ~/catkin_ws/catkin_makesource devel/setup.bash\至此,R OS 的安装已经完成。
您可以通过运行命令r osversion -d`来验证R OS 版本。
二、R0S 应用开发指南1.创建R OS 程序包:在R OS 中,程序的基本单元是包(package)。
可以使用以下命令创建一个新的R OS 程序包:cd ~/catkin_ws/srccatkin_create_pkg <package_name>std_msgs rospy roscppV 1 V其中,<package_name> 代表您所创建的包的名称。
机器人操作系统ROS的使用入门指南

机器人操作系统ROS的使用入门指南机器人操作系统(Robot Operating System,简称ROS)是一个用于开发机器人应用程序的开源框架。
ROS旨在提供一种通用的软件平台,使机器人开发变得更加简单、灵活和可复用。
本文将向您介绍ROS的使用入门指南,帮助您快速上手ROS的基本概念和使用方法。
1. ROS的基本概念ROS由一系列的软件模块组成,这些模块提供了一套用于构建、部署和管理机器人应用程序的工具和库。
以下是ROS的一些基本概念: - 节点(Nodes):ROS的应用程序由多个节点组成,每个节点相当于一个独立的执行单元。
节点之间通过ROS通信来进行数据交换和协调。
- 主题(Topics):节点可以通过发布主题来向其他节点广播消息,也可以通过订阅主题来接收其他节点广播的消息。
主题是ROS中最常用的通信机制之一。
- 服务(Services):节点可以提供服务来响应其他节点的请求,也可以调用其他节点提供的服务。
服务是一种简单的请求-响应机制。
- 行为(Actions):行为是一种高级的节点通信机制,它允许节点异步执行一个或多个目标,并提供状态和反馈。
2. 安装ROS首先,您需要在您的计算机上安装ROS。
ROS支持多个操作系统,包括Ubuntu、Debian和Fedora。
您可以从ROS官方网站上找到适合您操作系统版本的安装指南,并按照指引完成安装。
3. 创建和运行ROS节点在安装完成后,您可以创建一个ROS节点并运行它。
以下是创建和运行ROS节点的基本步骤:- 打开终端,并输入`roscore`命令来启动ROS主节点。
- 在另一个终端中,使用`rosrun`命令来运行一个ROS节点。
例如,`rosrun turtlesim turtlesim_node`将启动一个名为`turtlesim_node`的节点。
4. 发布和订阅主题发布和订阅主题是ROS中最常用的通信机制之一。
以下是发布和订阅主题的基本步骤:- 创建一个ROS节点,并定义一个发布者(Publisher)对象。
机器人操作系统ROS的初步使用方法
机器人操作系统ROS的初步使用方法机器人操作系统(Robot Operating System,ROS)是一个用于编写机器人软件的开源框架。
它提供了一系列工具、库和约定,使开发者能够更轻松、更高效地构建机器人应用程序。
本文将介绍ROS的初步使用方法,帮助读者快速上手。
一、ROS的安装与配置1. 下载安装:ROS支持多个操作系统,包括Ubuntu、Mac OS和Windows。
在安装ROS之前,确保你的操作系统符合ROS的要求。
然后,根据官方文档下载并安装ROS的适用版本。
2. 配置工作空间:ROS的开发过程中,采用工作空间(workspace)的概念。
你需要创建一个工作空间来存放你的ROS包。
首先,创建一个文件夹作为你的工作空间,然后使用以下命令初始化工作空间:```$ mkdir -p ~/catkin_ws/src$ cd ~/catkin_ws/$ catkin_make$ source devel/setup.bash```二、创建ROS包和节点1. 创建ROS包:包是ROS系统的基本组织单位。
使用以下命令在工作空间内创建一个ROS包:```$ cd ~/catkin_ws/src$ catkin_create_pkg my_package rospy std_msgs```2. 创建ROS节点:节点是ROS的基本通信单元。
使用以下命令创建一个ROS节点:```$ cd ~/catkin_ws/src/my_package$ mkdir scripts$ cd scripts$ touch my_node.py$ chmod +x my_node.py```然后,在my_node.py中编写你的节点逻辑。
三、ROS的核心概念1. 发布与订阅(Publish/Subscribe):ROS使用发布与订阅模型进行通信。
一个节点可以发布消息,其他节点可以订阅这些消息。
这种松耦合的通信方式使得节点之间的通信更加灵活。
ROS简单的机器人仿真教程

ROS简单的机器人仿真教程ROS(Robot Operating System)是一个用于构建机器人应用程序的开源框架,它提供了一系列工具和库,可以帮助开发人员更高效地构建和管理机器人系统。
下面我们将介绍ROS的基本概念和一些简单的机器人仿真教程。
首先,我们需要安装ROS。
ROS支持多个操作系统,包括Ubuntu、macOS和Windows。
在这里,我们将以Ubuntu为例进行介绍。
2.创建工作空间:在终端中输入以下命令创建一个ROS的工作空间:```bash$ mkdir -p ~/catkin_ws/src$ cd ~/catkin_ws/$ catkin_make```这将创建一个名为catkin_ws的目录,并在其中创建一个src目录用于存放ROS程序包。
3.创建ROS程序包:在终端中输入以下命令来创建一个ROS程序包:```bash$ cd ~/catkin_ws/src$ catkin_create_pkg robot_sim_demo std_msgs rospy roscpp```这将在src目录中创建一个名为robot_sim_demo的ROS程序包,并添加std_msgs、rospy和roscpp等依赖项。
4. 创建ROS节点:在src目录中创建一个Python脚本文件,例如demo_node.py,并添加以下代码:```python#!/usr/bin/env pythonimport rospyrospy.init_node('demo_node')def main(:while not rospy.is_shutdown(:rospy.loginfo('Hello, ROS!')if __name__ == '__main__':try:mainexcept rospy.ROSInterruptException:pass```这个脚本创建了一个名为demo_node的ROS节点,并在循环中每隔一段时间输出一条日志。
ros 教程

ros 教程ROS(Robot Operating System)是一个开源的机器人操作系统,广泛应用于机器人领域。
它提供了一系列的库和工具,用于帮助开发者构建机器人应用程序。
在本教程中,我们将介绍ROS的基本概念、安装方法以及如何编写ROS程序。
首先,我们来了解ROS的基本概念。
ROS是一种分布式处理系统,它包含一组相互协作的节点。
每个节点可以独立地运行在不同的计算机上,通过ROS的通信机制进行消息传递。
这种分布式的架构使得开发者可以方便地将不同的模块组合在一起,构建复杂的机器人系统。
安装ROS是使用它的第一步。
ROS支持多个操作系统,包括Ubuntu、Fedora、Debian等。
在安装ROS之前,您需要安装Linux操作系统。
然后,您可以按照ROS官方网站上的指南,选择适合您操作系统版本的安装包进行安装。
安装完成后,您可以使用"roscore"命令来启动ROS的核心功能。
一旦安装完成,您就可以开始编写ROS程序了。
ROS使用一种称为ROS包的结构来组织代码。
每个ROS包包含一组节点、消息定义和其他相关文件。
您可以使用"catkin_create_pkg"命令来创建一个新的ROS包。
在ROS包中,您可以创建多个节点,并将它们组合在一起以实现特定的功能。
通过定义消息类型和服务,节点之间可以进行通信并交换数据。
在编写ROS程序时,您需要了解一些基本的概念。
首先是ROS的核心概念之一:发布者和订阅者。
发布者(Publisher)负责发送消息,而订阅者(Subscriber)负责接收消息。
通过调用"rospy.Publisher"和"rospy.Subscriber"函数,您可以创建一个发布者或订阅者对象,并指定要发送或接收的消息类型。
另一个重要的概念是ROS服务(Service)。
服务允许节点之间进行请求和响应,并传递复杂的数据结构。
ROS机器人操作系统教程
ROS机器人操作系统教程第一章:ROS介绍1.1 ROS的定义和作用ROS(Robot Operating System)是一个灵活且可扩展的机器人操作系统,它提供了一系列的工具、库和软件包,用于开发机器人应用程序。
1.2 ROS的特点ROS具有以下特点:开源、模块化设计、广泛应用、强大的社区支持等。
1.3 ROS的体系结构ROS的体系结构由三个核心概念组成:功能包(Package)、节点(Node)和消息(Message)。
第二章:ROS安装与配置2.1 硬件与软件要求2.2 ROS版本选择与安装2.3 ROS环境配置2.4 ROS安装验证第三章:ROS基本概念与操作3.1 创建ROS工作空间3.2 创建功能包3.3 编写ROS节点3.4 ROS消息通信3.5 ROS服务与参数服务器第四章:ROS常用工具介绍4.1 rqt图形化界面工具4.2 rosbag数据记录与回放4.3 rviz三维可视化工具4.4 rosrun与roslaunch命令工具第五章:ROS机器人开发实践5.1 ROS机器人模拟5.2 ROS机器人感知与定位5.3 ROS机器人运动控制5.4 ROS机器人操作与交互第六章:ROS应用案例分析6.1 无人机控制系统6.2 自动驾驶汽车6.3 机器人视觉导航6.4 工业机械臂控制第七章:ROS进阶开发7.1 ROS代码调试与测试7.2 ROS包的发布与维护7.3 ROS性能优化与调整第八章:ROS未来展望8.1 ROS2的发展方向8.2 ROS在工业界的应用前景8.3 ROS与人工智能的结合结语:ROS机器人操作系统是当前机器人领域最重要的开发平台之一。
它不仅提供了强大的工具和框架,更拥有广泛的用户社区和丰富的应用案例。
从ROS的基本概念与操作到进阶开发和应用实践,本教程旨在帮助读者全面了解和掌握ROS的基础知识和高级技巧,并展望ROS的未来发展趋势。
通过学习和实践,读者将能够在机器人领域中快速搭建开发环境、编写功能包和节点、进行消息通信、使用常用工具、实现机器人开发等。
机器人操作系统ROS的入门教程

机器人操作系统ROS 的入门教程随着机器人技术的快速发展,机器人操作系统(Robot Operating System,ROS) 已成为开发和控制机器人的常用工具。
ROS 不仅是一个操作系统,还是一个灵活且强大的平台,可以用于构建各种类型的机器人应用程序。
本文将为您提供R OS 的入门教程,帮助您开始使用R OS 进行机器人开发。
第一部分:ROS的介绍和安装1.ROS 的简介ROS 是一个开源的、灵活的、基于Unix 的操作系统,提供了一系列工具库和用于构建机器人软件应用的规范。
ROS 的目标是让机器人开发者能够共享代码和算法,从而加快机器人技术的发展。
2.ROS 的安装ROS 支持多种操作系统,包括U buntu 、Debian 、Fedora 等。
您可以根据自己的系统选择合适的安装方式。
通常情况下,您可以通过终端命令来安装ROS。
第二部分:ROS的基本概念和术语1.节点(Nodes)在ROS 中,节点是运行ROS 代码的基本单位,每个节点都可以独立运行,可以通过通信机制与其他节点进行交互。
节点可以是传感器、执行器、控制算法等。
2.主题(Topics)主题是ROS 中节点之间进行通信的一种机制。
一个节点可以发布一个主题(topic), 而其他节点则可以订阅该主题,接收相应的数据。
主题可以是传感器数据、状态信息等。
3.服务(Services)服务是一种对节点请求和回复的机制。
一个节点可以提供一个服务,而其他节点则可以向该服务发送请求并等待回复。
服务常用于一些需要特定功能或者计算量较大的情况。
4.资源(Resources)资源是ROS 中节点之间共享的数据单元,包括参数、消息和服务等。
节点可以通过读取和修改资源来进行通信和共享数据。
第三部分:编写ROS程序1.创建ROS 工作空间在开始编写ROS 程序之前,首先需要创建一个ROS 工作空间。
您可以使用catkin 工具来创建和管理ROS 工作空间。
机器人操作系统ROS Indigo 入门学习(1)——安装ROS Indigo
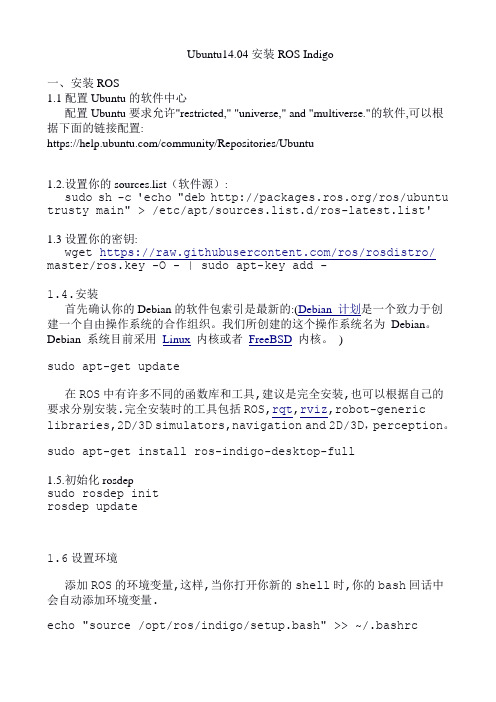
Ubuntu14.04安装ROS Indigo一、安装ROS1.1配置Ubuntu的软件中心配置Ubuntu要求允许"restricted," "universe," and "multiverse."的软件,可以根据下面的链接配置:https:///community/Repositories/Ubuntu1.2.设置你的sources.list(软件源):sudo sh -c 'echo "deb /ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list' 1.3设置你的密钥:wget https:///ros/rosdistro/ master/ros.key -O - | sudo apt-key add -1.4.安装首先确认你的Debian的软件包索引是最新的:(Debian 计划是一个致力于创建一个自由操作系统的合作组织。
我们所创建的这个操作系统名为Debian。
Debian 系统目前采用Linux内核或者FreeBSD内核。
)sudo apt-get update在ROS中有许多不同的函数库和工具,建议是完全安装,也可以根据自己的要求分别安装.完全安装时的工具包括ROS,rqt,rviz,robot-generic libraries,2D/3D simulators,navigation and 2D/3D,perception。
sudo apt-get install ros-indigo-desktop-full1.5.初始化rosdepsudo rosdep initrosdep update1.6设置环境添加ROS的环境变量,这样,当你打开你新的shell时,你的bash回话中会自动添加环境变量.echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrcsource ~/.bashrc(使环境变量设置立即生效)1.7安装rosinstallsudo apt-get install python-rosinstallrosinstall命令是一个使用的非常频繁的命令,使用这个命令可以轻松的下载许多ROS软件包。
ROS简单的机器人仿真教程
ROS简单的机器人仿真教程ROS(Robot Operating System)是一个灵活的框架,用于编写机器人软件。
它提供了一个强大的工具集,用于创建、仿真和部署机器人应用程序。
在本教程中,我们将介绍如何使用ROS进行简单的机器人仿真。
首先,我们需要安装ROS。
ROS有几个不同的版本,包括ROS Kinetic和ROS Melodic。
在本教程中,我们将使用ROS Kinetic。
安装ROS的详细步骤可以在ROS官方网站上找到。
安装完成后,我们可以开始创建机器人仿真程序。
首先,我们需要创建一个ROS包。
ROS包是组织ROS程序的基本单位。
可以使用以下命令创建ROS包:```$ cd ~/catkin_ws/src$ catkin_create_pkg my_robot_sim```在这个例子中,我们创建了一个名为“my_robot_sim”的ROS包。
现在我们可以进入ROS包目录并创建一些文件。
首先,我们将创建一个机器人模型文件。
在ROS中,机器人模型可以使用URDF(Unified Robot Description Format)来描述。
我们可以使用URDF来描述机器人的链接和关节。
我们可以使用以下命令创建一个URDF文件:```$ roscd my_robot_sim$ mkdir urdf$ cd urdf$ touch my_robot.urdf```接下来,我们将创建一个控制器配置文件。
控制器配置文件允许我们将控制器与机器人模型关联起来,从而控制机器人的运动。
我们可以使用以下命令创建一个控制器配置文件:```$ roscd my_robot_sim$ mkdir config$ cd config$ touch my_robot_control.yaml```接下来,我们将创建一个仿真运行文件。
仿真运行文件允许我们指定要在仿真中运行的节点和参数。
我们可以使用以下命令创建一个仿真运行文件:```$ roscd my_robot_sim$ mkdir launch$ cd launch$ touch my_robot_unch```一旦我们创建了机器人模型文件、控制器配置文件和仿真运行文件,我们就可以开始仿真了。
ROS安装及配置教程
ROS安装及配置教程ROS(Robot Operating System)是一个开源机器人操作系统,它提供了一系列的工具和库以帮助开发者构建机器人应用程序。
本文将介绍ROS的安装和配置过程。
ROS支持多个操作系统,包括Ubuntu、Debian、Fedora等。
在本教程中,我们将使用最常用的Ubuntu系统进行演示。
第一步:安装Ubuntu首先,在您的计算机上安装Ubuntu操作系统。
ROS支持多个Ubuntu 版本,但在本教程中,我们将使用最新版本的Ubuntu 20.04 LTS作为示例。
第二步:添加ROS软件包仓库在安装ROS之前,我们需要将ROS软件包仓库添加到Ubuntu的软件源中。
打开终端并执行以下命令:``````第三步:添加ROS密钥运行以下命令以添加ROS密钥:```sudo apt install curl```第四步:安装ROS运行以下命令以安装ROS桌面完整版:```sudo apt updatesudo apt install ros-noetic-desktop-full```在这个例子中,我们使用的是ROS Noetic版本。
根据您的需求,您可以安装不同的ROS版本。
第五步:初始化ROS在安装完成后,我们需要初始化ROS环境。
打开终端并运行以下命令:```source /opt/ros/noetic/setup.bash```要使ROS环境变量在每次打开新终端时都自动加载,可以将上述命令添加到您的`.bashrc`文件中。
第六步:创建ROS工作空间在使用ROS之前,我们需要创建一个ROS工作空间。
ROS工作空间是您存放ROS代码和构建项目的地方。
首先,创建一个名为`catkin_ws`的目录,并进入该目录:```mkdir -p ~/catkin_ws/srccd ~/catkin_ws/```然后,初始化工作空间:```catkin_make```完成初始化后```source devel/setup.bash```第七步:安装ROS工具运行以下命令以安装常用的ROS工具:```sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential ```第八步:配置ROS最后,运行以下命令以更新ROS依赖项:```sudo rosdep initrosdep update```至此,ROS的安装和配置已经完成。
机器人操作系统的配置与调试指南

机器人操作系统的配置与调试指南随着人工智能技术的飞速发展,机器人在许多领域中扮演着重要的角色。
机器人操作系统(Robot Operating System,ROS)作为一个灵活、可扩展的开源框架,被广泛应用于机器人技术领域。
在使用ROS开发和控制机器人之前,正确配置和调试系统是至关重要的。
本文将为您提供机器人操作系统的配置与调试指南。
一、安装ROS1. 操作系统选择:ROS支持多种操作系统,包括Ubuntu、Debian和Fedora等等。
根据您的需求选择适合的操作系统。
2. 安装ROS:可以通过命令行或者图形界面进行安装。
具体安装步骤可以参考ROS官方网站的安装教程。
二、配置ROS环境1. 环境变量设置:ROS在使用过程中需要设置一些环境变量,以便系统能够正确地找到ROS相关的程序和库文件。
可以通过配置.bashrc文件来设置环境变量,例如添加以下内容:```source /opt/ros/<ros_version>/setup.bash```2. 配置网络代理:如果您的系统需要通过代理服务器连接到互联网,可以使用以下命令进行ROS网络代理的配置:```export http_proxy="http://<proxy_server>:<port>"export https_proxy="https://<proxy_server>:<port>"export no_proxy="localhost,127.0.0.1,<other_hosts>"```三、创建ROS工作空间1. 创建工作空间:可以通过以下命令创建一个新的ROS工作空间:```mkdir -p ~/catkin_ws/srccd ~/catkin_ws/catkin_make```2. 设置环境变量:为了能够正确地使用工作空间,需要将其路径添加到环境变量中。