周跳检测与修复
第三章GPS:周跳探测与修复

-0.515 -508.92 2006.7 -2997.8 1993.4 -493.8 -1.491
1倍 -4倍 6倍 -4倍 1倍
9
历元间高次差分法(4)
设接收机钟稳定度 10 8 ,历元间隔为10s
钟差引起的原始观测值观测误差 0 15 .47 2 15 6 0 1 8 0 1 0 158
5
77 -204102.7230
-38.8110
-9358.3440
3.0290
2.5750
-6.5970
次
78 -213461.0670
-36.2360
-3.5680
差
-9394.5800
79 -222855.6470
-37.2290
-0.9930 2.6360
6.2040
分
-9431.8090
80 -232287.4560
-41.783 -43.535 -41.804 -37.105 -538.36 461.19 -36.236 -37.229 -35.586 -32.798
-1.752 1.731 4.699 -501.25 999.55 -497.42 -0.993 1.643 2.788
3.483 2.968 -505.95 1500.8 -1497 496.43 2.636 1.145
推导在以上假设下,历元间五次差分后能探测的最小周跳
I RI0
I 1I 2I 3I 4I 5I T
1 1 0 0
0
1 1
0
RI
0
0 1 1
0 0
0
0
0 0
0 10 20 30 40 50 60T
0 0 0 1 1 0 0 0 0 0 1 1
利用多项式拟合方法对周跳进行探测与修复

利用多项式拟合方法对周跳进行探测与修复一前言全球卫星定位系统(GPS)是一个实时的,全天候,全方位的定位系统。
卫星在空间的运行轨迹是一条平滑的曲线,因而卫星至接收机的距离观测值(即载波相位观测值)的变化也是平缓而有规律的。
周跳将破坏这种规律性,使观测值产生一种系统性的粗差。
周跳的探测及修复从本质上讲就是如何从载波相位观测值的时间序列中寻找可能存在的这种系统性的粗差并加以改正。
二周跳的探测与修复多项式拟合法可以有效的对周跳进行探测与修复,算法适合于计算机运算,被广泛采用。
多项式拟合法所采用的载波相位观测值,可以是单差观测值和双差观测值也可以是非差相位观测值。
下面以双差观测值为例介绍用多项式拟合的方法探测与修复周跳。
将m个无周跳的双差观测值代入下式:(1)式中, n为多项式拟合阶数,是时间基准, 是时间变化量, 是时刻对应的拟合载波相位双差观测量。
其中i=1,2,…,m (m>n+1)第一步:用最小二乘法求得式中多项式系数,,…,,并根据拟合后的残差计算中误差(2)第二步:用求得的多项式系数来外推下一个历元的双差载波相位值,并与通过实际观测计算出的双差相位观测值进行比较,当两者之差小于3时,则认为该双差观测值无周跳误差,去掉最早的一个观测值,加入实际观测计算出的双差相位观测值,然后回到1步继续进行多项式拟合外推下一历元。
当外推值与通过实际观测而计算出的值之差>=3时,认为通过实际观测而计算出的双差载波相位值含有周跳误差。
此时应采用外推值的整周数代替有周跳误差的计算值的整周数,但的不足一周小数部分保持不动。
然后去掉最早的观测值,加入修正后的回到第一步继续求多项式系数并外推下一个历元的双差值。
将上述过程持续到最后一个历元。
需要说明的是:(1)由于卫地距对时间的四阶导数/或五阶导数/一般已趋近于零,所以n的阶数一般去3或4阶即可。
(2) 由于与相差悬殊,运用多项式进行拟合,要对时间[~]进行标准化,令为:(3)这样就把映射为,则(1)式就变为(4)由于存在误差,上式不可能完全满足,令(5)将误差方程表示成矩阵的形式:(6)无周跳的双差观测值的确定:为了进行多项式拟合,初始的m个载波相位双差观测值必须精确无周跳。
GPS 周跳的探测与修复
二 周跳的特性(I)
卫星信号的失锁可能发生在两个连续的历元间,也可能持续几
分钟或更长时间,重新捕获信号之后的所有载波相位观测值都会
与正确值相差 n 周。
ti 时刻 i [ Fri ( ) Int i ( ) n N ]
3.1 周跳的探测(III)
多项式拟合法
将 m 个无周跳的载波相位观测值 i 代入下式,进行多项 式拟合。
i a0 a1 (ti t0 ) a2 (ti t0 )2 an (ti t0 )n (i 1, 2, , m; m n 1)
t1
0
1
1 [ Fr1 ( ) Int1 ( ) N ]
ti 时刻 i [ Fri ( ) Int i ( ) N ]
N
N
Fr0 ( )
Int1 ( ) Fr1 ( )
由于某种原因,在某一时段计数器中止 了正常的累积工作,从而使整周计数应有值 n 少了 n 周,那么当计数器恢复正常工作后, 所有的 Int i ( )便都会含有同一偏差值 。 这种整周计数 Int i ( ) 出现系统偏差而不 足一周的部分Fri ( ) 仍然保持正确的现象称
观 测 载波相位观测值 历 p p q (i 2) ti 元2 k (i 2) m (i 2) k
三差 双差
q (i 2) m q (i 1) m q (i ) m q (i 1) m q (i 2) m
pq km (i 2)
对差分整周模 糊度的影响
相邻历元间差分
7.4-整周跳变的探测与修复
7.4 整周跳变的探测与修复GPS 载波相位测量,只能测量载波滞后相位1周以内的小数部分,不能测量载波滞后相位的整周数)(0N 。
其后的载波滞后相位整周数变化值(始后周数),是通过多普勒积分由电子计数器累计读得的。
由于GPS 信号接收机自身故障或GPS 信号意外中断,导致载波锁相环路的短暂失锁,而引起多普勒计数的短暂中断;当载波锁相环路重新锁定后,多普勒计数又重新开始,以致造成载波滞后相位整周数变化值(始后周数)的不连续计数。
这种多普勒计数的中断现象,称为整周跳变,简称为周跳(cycle slip )。
当GPS 载波相位观测值没有发生周跳时,卫星一次通过的载波滞后相位整周数是连续的,各时元(历元)的观测值都会含有一个共同的整周未知数,即时元1t 的整周模糊度0N ,当发生周跳时,其后所有的载波相位观测值都会含有一偏差∆,该偏差就是中断期间所丢失的整周计数,即周跳后的载波相位观测中含有未知数∆+0N 。
所谓周跳的探测就是利用观测的信息来发现周跳。
在探测出周跳后,利用观测信息来估计丢失的周数∆,从而修正周跳后的载波相位观测值,称为周跳的修复。
在探测出周跳之后,也可将∆+0N 视为周跳后的整周模糊度而利用平差的原理解求出这个未知参数,这是一个整周模糊度的求解问题。
静态定位中,由于接收机静止不动,周跳的探测与修复问题已得到了很好的解决。
在动态环境下,由于动态接收机在不断地运动中,周跳的探测与修复比静态定位要困难得多。
由于GPS 信号接收机能提供多种观测信息,利用这些观测信息本身的相互关系(无需轨道信息),可以对周跳进行探测和修复,目前主要有下列方法。
(1)根据有周跳现象的发生将会破坏载波相位测量的观测值ϕϕ∆+)(Int 随时间 而有规律变化的特性来探测周跳(高次差或多项式拟合法)(2)利用载波相位及其变化率的多项式拟合来探测、修复周跳(多项式拟合法); (3)利用伪距和载波相位观测值组合来探测、修复周跳(伪距/载波组合法); (4)利用双频载波相位组合观测值探测、修复周跳(电离层残差法)。
周跳的探测及修复

周跳的探测及修复一、周跳的概念任一观测历元t,完整的载波相位测量值可写为:它是由三部分组成的,其中为接收机i对卫星j的第一个(t0时刻)载波测量值中的整周未知数部分;是接收机实际测量的不足一周的相位值,只要卫星与接收机的振荡器连续正常工作,该值可以精确测定;可由接收机中的多普勒(频移)计数器累计求得[在有的文献中,记为]。
但由于种种缘由,如卫星信号被遮挡或卫星电路瞬时故障,gps 接收机四周的电磁干扰,或接收机电路的瞬时故障,或接收机工作于恶劣的动态环境下,而使载波跟踪环路无法锁住卫星信号等,都将使多普勒计数中断。
如此,在接收机恢复对GPS卫星信号的跟踪后,多普勒计数器的累计值便不正确了。
这就是整周跳变(简称“周跳”)。
因此,必需查找载波相位测量中整周丢失的地方,并对其进行修复,以恢复正确的相位测量值,确保载波相位测量的高精度。
二、周跳的探测及修复周跳的数值可大可小,大的可达十几周甚至成千上万周,小的可能只有几周。
通常大周跳与小周跳的探测方法是不同的,下面分别争论之。
(一)大周跳的探测及修复在观测期间,某颗卫星到接收机的距离的变化是平滑的,有规律的。
也就是说,载波相位观测值[]的变化是平滑的,有规律的。
假如观测值中消失周跳,则将破坏这种平滑性和规律性。
但由于卫星相对于接收机距离的变化可达每秒钟数千周,假如10秒钟观测一次,这种变化可达数万周,不易发觉数十周的周跳。
为此,可对相邻观测值求高次差,以减弱站星距变化对整周计数值的影响。
在这种状况下,假如没有周跳,则求4~5次差后的载波相位观测值的变化,主要是GPS 接收机的晶体振荡器不稳定引起的,它们应呈偶然性误差,且数值为几周以下;否则,求4~5次差后,其变化不再具有偶然性,且数值比产生的周跳值还要大,该表在序号ni为35处,发生丢失100周的大周跳),据此,我们能够找到产生较大周跳的地方,并对其进行修复。
序号ni一次差二次差三次差四次差五次差30464623.158111210.0672398.68591.1281 1.3791-101.9586 31 475833.2251 11608.7531 32 487441.9784 399.8140 12023.5671 2.507233 499450.5455 402.3212-100.5795 12410.8883 -98.0723401.543434 511861.4338 304.2489 300.9639 12715.1372 202.8916-601.2360 35* 524576.5710 507.1405-300.2721 13222.2777 -97.3805399.850236* 537798.8487 409.760099.5781 13632.03772.197637*551430.8864411.957614043.995138*565474.8817有大周跳的相位观测值的高次差(序号右上方有*号者发生了大周跳)为了确定大周跳的数值,可依据发生周跳前的4~5个历元的观测值,用高次插值公式外插求出表中序号为35的正确观测值(这里仅用计数值的整数部分,小数部分仍用原观测值)。
周跳探测与修复

周跳探测与修复摘要:在GPS 数据处理过程中,周跳的存在会使观测值中出现一个偏差,这会使观测值失真,从而不能准确解算整周模糊度,因而,周跳探测与修复是GPS 载波相位高精度定位必须要解决的问题之一。
本文简单介绍周跳的概念、一些常用的周跳探测方法,并探讨了周跳对定位的影响。
关键词:数据处理,周跳,探测修复1 周跳的概念完整的载波相位观测值可表示为:),(),()0()(0i i i t Fr t t Int b t φφφ+-+=式中,)0(b 为初始整周模糊度:),(0t t Int i -φ为整周记数:),(i t Fr φ为不足一周的小数部分。
由于某些原因,历元0至i 之间的整周记数发生中断,这样,恢复之后的整周记数发生错误,而小数部分正确,这就是周跳现象。
周跳的大小可由1周到几万周不等。
2 引起周跳的原因引起周跳的原因主要有以下四个方面(Bernese Document, 2001 ):(1)由于树木、建筑等对卫星信号的遮挡;(2)由于电离层条件、多路径效应、接收机的高动态和卫星的低高度角等产生的低信噪比;(3)接收机处理软件的问题;(4)卫星振荡器出现故障。
3 周跳对定位的影响周跳的发生是个随机事件,因此周跳的探测的算法必须是计算量少、及时的算法。
周跳的探测与修复的过程是必须进行的,因为它干扰了相位观测数据,会导致定位数据处理结果中存在偏差,在跳周数被确定和通过检验后,最后的修复是很容易用数学加减法实现的。
图 3.1显示周跳在相位观测中存在的情况。
图1.1载波相位中存在的周跳对于L1载波,一周的周跳可以造成约20cm的测距误差,根据查佩利的统计,观测值中存在一个周跳对经度、纬度、高程的影响可达分米级,因此,在GPS载波相位定位数据处理中应对周跳进行合理的处理。
通常对所探测出的周跳有周跳修复或添加新模糊度参数两种处理方法。
添加新模糊度参数法由于使观测方程中相位模糊度参数增加,将增大模糊度确定的难度。
5.2定位原理-整周模糊度 周跳的探测与修复

t0
() i
N Fr
Fr
0
i
0
Int
N
0
GPS原理及其应用
1、 静态相对定位中常用的几种方法
• 待定参数法-经典方法 1)取整法 2)置信区间法
XNi为模糊度的实数解 mXNi=s0(QNiNi)1/2为该参数的中误差 置信区间为[XNi- b·mXNi,XNi+ b·mXNi] b= xt(f,α /2),根据自由度(f=n-u)和置信水平(1-α ), 从t分布的数值表中查取。 如: f=2500,1-α =99.9%, b =3.28
GPS原理及其应用
周跳的探测、修复方法② (续)
• 高次差法的问题
– 接收机钟差对此方法有效性的影响
设接收机钟的稳定度为 10,接收机采样间隔为 秒, 10 15 对于L1 f L1 1.57542109 Hz) ( , 则接收机钟对相邻历元 载波相位观测值的影响 1010 151.57542109 2.36(周)。 为
接收机在高速动态的环境下进行观测导致接收机无法正确跟踪卫星信号卫星瞬时故障无法产生信号gps原理及其应用将影响从周跳发生时刻历元之后的所有观测值周跳将使周跳发生后的所有观测值包含相同的整周计数错误gps原理及其应用将周跳标记出来引入周跳参数进行解算gps原理及其应用方法
GPS原理及其应用
周跳的探测与修复 整周模糊度的确定
• 残差法
– 方法
• 根据平差后的残差,进 行周跳的探测与修复
100.00 2 0.00 -100.00 时间 (周) 残差(周) SV12-SV15
– 特点
• 可以发现小周跳
载波相位双差观测值的残差图
GPS原理及其应用
GPS测量中的周跳问题与解决方法

GPS测量中的周跳问题与解决方法导语:全球定位系统(GPS)已经成为现代测量技术中不可或缺的工具。
然而,在GPS测量过程中,周跳问题一直是一个困扰测量者的难题。
本文将介绍周跳问题的原因和解决方法,以帮助读者更好地理解和应对这一问题。
一、周跳问题的原因1.1 GPS信号传播过程中的干扰GPS信号在传播过程中会受到许多因素的干扰,如电离层、大气层、多径效应等。
这些干扰会导致接收机无法正确接收到连续的卫星信号,从而产生周跳。
1.2 接收机硬件问题接收机硬件问题也是周跳问题的一个重要原因。
接收机的时钟漂移、指纹开关等问题可能导致信号接收中断,进而引发周跳。
二、周跳问题的影响2.1 测量误差的增大周跳问题会导致测量误差的增大,进而影响测量结果的准确性和可靠性。
特别是在高精度测量场合,周跳问题十分严重。
2.2 数据处理的困难周跳问题会使得GPS观测数据不连续,给数据处理带来困难。
在进行数据处理和后续分析过程中,需要对周跳进行修复,否则将影响测量结果的解算和分析。
三、周跳问题的解决方法3.1 使用周跳检测方法周跳可以通过一系列周跳检测方法进行识别和修复。
目前最常用的方法是基于信号载波相位和伪距的差分技术,通过比较不同历元的观测数据,识别出可能存在周跳的测站和卫星,进而进行修复。
3.2 增强接收机硬件性能改进接收机硬件性能可以有效降低周跳问题的发生率。
例如,改进接收机的时钟漂移、增加信号过滤器等,可以减少周跳问题的发生。
3.3 外部辅助导航信息利用外部辅助导航信息,比如地面控制测站观测数据、星历数据等,可以提高GPS测量的准确性和可靠性,从而减少周跳问题的发生。
四、结语周跳问题一直是GPS测量中的一个难题。
通过了解周跳问题的原因和解决方法,我们可以更好地应对这一问题,提高GPS测量数据的准确性和可靠性。
在实际应用中,我们应根据具体情况选择适合的解决方法,以确保测量结果的精度和可靠性。
本文以周跳问题为主题,通过介绍周跳问题的原因和影响,并结合解决方法,生动地阐述了GPS测量中的周跳问题及其解决方法。
BDS载波相位观测值周跳探测与修复研究
BDS载波相位观测值周跳探测与修复研究BDS载波相位观测值周跳探测与修复研究摘要:随着卫星导航技术的快速发展,BDS(北斗卫星导航系统)在国内外得到了广泛应用。
在卫星导航中,准确的载波相位观测是关键的测量数据,然而,由于各种因素的干扰,观测值周跳误差可能会导致定位结果的不准确。
因此,周跳探测与修复研究成为了卫星导航领域的重要课题。
本文通过对BDS载波相位观测值周跳的探测方法和修复算法进行研究,提出了一种高效且准确的周跳处理方法,为提高载波相位观测的可靠性和定位精度提供了理论支持和实践指导。
一、引言BDS作为我国自主研发的全球卫星导航系统,具有覆盖全球、高精度、高可靠性的特点,在航空航天、交通运输、地质勘探等领域得到了广泛应用。
在卫星导航系统中,载波相位观测作为一种高精度的测量数据,对于提高定位精度和抗干扰性能起着关键作用。
然而,受到电离层延迟、多径效应、天线相位中心偏移等因素的影响,载波相位观测值可能会出现周跳误差,从而导致定位结果的不准确。
二、周跳探测方法为了准确地探测载波相位观测值中的周跳误差,研究人员提出了多种方法。
其中,常用的方法包括差分法、滑动窗口法和快速傅里叶变换法。
差分法通过计算连续两个历元观测值之间的差值来判断是否存在周跳误差。
滑动窗口法利用一定长度的滑动窗口内的历元观测数据进行差分运算,通过比较差分值的变化来判断周跳误差的出现。
快速傅里叶变换法则是基于信号频谱的变化特性,通过计算载波相位观测值的频谱进行周跳探测。
三、周跳修复算法在探测到载波相位观测值中的周跳误差后,需要进行修复处理以恢复准确的观测值。
常用的修复算法包括整周模糊度固定法和基于滤波器的算法。
整周模糊度固定法通过将周跳修复为整数倍的波长来消除观测值中的周跳误差。
基于滤波器的算法则是通过对载波相位观测值进行滤波处理,根据观测值的变化趋势来恢复准确的观测值。
四、实验与结果分析为了验证所提出的周跳探测和修复方法的有效性,我们进行了一系列的实验。
GNSS测量中的周跳检测与恢复处理

GNSS测量中的周跳检测与恢复处理导语:全球导航卫星系统(GNSS)已经成为现代测量领域的重要工具。
然而,由于各种误差和干扰,GNSS测量中的周跳问题仍然是一个挑战。
本文将探讨周跳的定义、原因,以及常见的周跳检测与恢复处理方法。
一、周跳的定义和原因在GNSS测量中,周跳是指接收机在测量过程中由于信号中断或误差引起的载波相位的不连续变化。
载波相位是估计测量的一个重要参数,而周跳的发生使得载波相位的测量失去了连续性。
周跳的主要原因包括:1. 天线阻挡:由于建筑物、树木等物体的阻挡,导致信号中断,从而产生周跳现象。
2. 天气条件:恶劣的天气条件,如强风、雷暴等,会导致信号的多径传播和衰减,从而引发周跳。
3. 接收机和信号处理器错误:由于硬件或软件故障,接收机和信号处理器可能会产生误差,导致周跳的出现。
二、周跳检测方法为了准确地检测和恢复周跳,许多方法被提出并广泛应用于GNSS测量中。
以下是常见的周跳检测方法:1. 整数模糊度方法(LAMBDA法):该方法基于载波相位模糊度的整数特性,通过解决一个最小方差整数规划问题来检测和修复周跳。
2. 线性组合方法:该方法基于多颗卫星的信号进行线性组合运算,对载波相位进行平滑处理,以检测和修复周跳。
3. 数学滤波方法:该方法使用数学滤波器对载波相位进行滤波,通过比较滤波后的值与原始值的差异来检测周跳。
4. 相位锁定环(PLL)方法:该方法采用相位锁定环技术对载波相位进行估计和跟踪,通过检测相位突变来检测和修复周跳。
三、周跳恢复处理方法一旦检测到周跳,需要进行相应的恢复处理。
下面是几种常见的周跳恢复处理方法:1. 周跳预测法:该方法基于已知的数据和统计模型,对未来可能发生的周跳进行预测,并进行修复。
2. 周跳排除法:该方法通过对载波相位序列以及卫星时钟偏差的连续监测,识别和排除可能引发周跳的卫星。
3. 频率偏移法:该方法基于载波和码的相位差和频率差,对周跳进行修复。
4. 滤波法:该方法使用滤波器对载波相位进行平滑处理,消除跳变,在保留尽可能多的原始信号信息的同时修复周跳。
GPS 周跳的探测与修复
伪距观测方程
R ( tr ts )c ion trop tide rel mul c
载波相位观测方程 ( tr ts )c N ion trop tide rel mul p
R N 2ion (c p )
R N 2ion (c p )
NW , i2 NW , i 4i
➢如何区分L1还是L2观测值中的周跳 ➢若L1与L2中发生相同的周跳呢
NW , i2 NW , i1
Y
周跳
3.1 周跳的探测(V)
历元间差分法
(ION GNSS 2009) Improving Real-Time Kinematic PPP with Instantaneous Cycle-Slip Correction
(i
2)
p m
(i
2)
q k
(i
2)
q m
(i
2)
双差
pq km
(i
2)
三差
ti1
p k
(i
1)
p m
(i
1)
q k
(i
1)
ti
p k
(i
)
p m
(i)
n
q k
(i
)
ti1
p k
(i
1)
p m
(i
1)
n
q k
(i
1)
ti2
p k
(i
2)
p m
(i
2)
n
q k
(i
2)
q m
(i
1)
q m
(i)
q m
(i
Ri (dtr dts )c ion Pi i ii (dtr dts )c ion i Ni i
7.4 整周跳变的探测与修复
7.4 整周跳变的探测与修复GPS 载波相位测量,只能测量载波滞后相位1周以内的小数部分,不能测量载波滞后相位的整周数)(0N 。
其后的载波滞后相位整周数变化值(始后周数),是通过多普勒积分由电子计数器累计读得的。
由于GPS 信号接收机自身故障或GPS 信号意外中断,导致载波锁相环路的短暂失锁,而引起多普勒计数的短暂中断;当载波锁相环路重新锁定后,多普勒计数又重新开始,以致造成载波滞后相位整周数变化值(始后周数)的不连续计数。
这种多普勒计数的中断现象,称为整周跳变,简称为周跳(cycle slip )。
当GPS 载波相位观测值没有发生周跳时,卫星一次通过的载波滞后相位整周数是连续的,各时元(历元)的观测值都会含有一个共同的整周未知数,即时元1t 的整周模糊度0N ,当发生周跳时,其后所有的载波相位观测值都会含有一偏差∆,该偏差就是中断期间所丢失的整周计数,即周跳后的载波相位观测中含有未知数∆+0N 。
所谓周跳的探测就是利用观测的信息来发现周跳。
在探测出周跳后,利用观测信息来估计丢失的周数∆,从而修正周跳后的载波相位观测值,称为周跳的修复。
在探测出周跳之后,也可将∆+0N 视为周跳后的整周模糊度而利用平差的原理解求出这个未知参数,这是一个整周模糊度的求解问题。
静态定位中,由于接收机静止不动,周跳的探测与修复问题已得到了很好的解决。
在动态环境下,由于动态接收机在不断地运动中,周跳的探测与修复比静态定位要困难得多。
由于GPS 信号接收机能提供多种观测信息,利用这些观测信息本身的相互关系(无需轨道信息),可以对周跳进行探测和修复,目前主要有下列方法。
(1)根据有周跳现象的发生将会破坏载波相位测量的观测值ϕϕ∆+)(Int 随时间 而有规律变化的特性来探测周跳(高次差或多项式拟合法)(2)利用载波相位及其变化率的多项式拟合来探测、修复周跳(多项式拟合法); (3)利用伪距和载波相位观测值组合来探测、修复周跳(伪距/载波组合法); (4)利用双频载波相位组合观测值探测、修复周跳(电离层残差法)。
精密单点定位的周跳探测及修复方法研究
精密单点定位的周跳探测及修复方法研究
随着全球定位系统(GPS)在各个领域的广泛应用,其精度、
可靠性和稳定性成为关注的热点。
在GPS测量中,周跳是指
接收机无法正确跟踪卫星信号的整数周期,导致测量的偏差和误差,进而影响到精密单点定位的结果。
因此,周跳探测和修复是GPS测量中的一个重要问题。
精密单点定位的周跳探测及修复方法主要包括以下几个方面:
1. 周跳探测方法:常见的周跳探测方法包括基于时间序列分析的方法、基于残差序列的方法、基于组合滤波的方法等。
其中,基于时间序列分析的方法是最常用的方法,通过对测量信号进行差分、平滑处理,然后利用统计方法判断周跳点的存在与否。
2. 周跳修复方法:周跳修复方法包括基于历史数据的方法、基于统计模型的方法、基于拟合算法的方法等。
其中,基于历史数据的方法是利用历史数据预测周跳点的位置和大小,然后进行修复;基于统计模型的方法是利用先验知识建立统计模型,根据模型拟合和统计推断进行周跳修复;基于拟合算法的方法则是利用拟合算法对受到周跳影响的数据进行拟合,然后根据拟合结果进行修复。
3. 周跳探测和修复的综合方法:由于周跳探测和修复之间存在一定的交互关系,在实际应用中,需要综合考虑周跳探测和修复的效果。
常见的周跳探测和修复的综合方法包括基于加窗技术的方法、基于滤波技术的方法、基于时频分析的方法等。
总之,精密单点定位的周跳探测及修复方法是GPS精度和可靠性的关键问题,其研究有助于提高GPS测量的精度和稳定性,满足各个领域对GPS测量精度和可靠性的不断需求。
周跳探测与修复的常用方法
仍然保持正确的现象称为整周跳变.
GNSS导航定位原理及应用
t1
t2
t3
t
2 = ∙ 2
+ INT 2
+
′ 2 = ∙ 2
+ INT 2
−+
′ 3 = ∙ 3
+ INT 3
−+
、四次差……
一次差
∙ − −1
三次差
3
3
∙ − −1
二次差
2
2
∙ − −1
四次差
4
4
∙ − −1
变化趋于平缓,四次差趋于零,呈偶然误差特性,受接收机钟误差影响
GNSS导航定位原理及应用
5
2022/11/23
周跳探测与修复的常用方法
四次差中的周跳数分别被放大了+1倍、-3倍、+3倍及-1倍;
GNSS导航定位原理及应用
8
2022/11/23
周跳探测与修复的常用方法
高次差法
接收机钟差的影响:
若接收机钟的稳定度为10-10,采样间隔为15s时,对L1载波
(1575.42 MHz)相位观测值引起的误差为:
= − × × . × = . 周
202.8916
2.6195
-97.3805
13222.2777
100周跳
四次差
11210.0672
12410.8883
25
三次差
1.3791
-100.5795
-0.5795
+1倍
300.9639
0.9639
周跳的探测与修复整周模糊度的确定
整数解 1、求初始解 2、将整周模糊度固定为整数 3、求固定解
实数解 基线较长误差相关性减弱初始解的误差将随之增大从而
使模糊度参数很难固定,整数化的意义不大
返回
< 2、快速定位中的常用方法
方法
走走停停和快速静态定位法是两种具有代 表性的快速定位法
< 4、MW观测值法
返回
<
5、残差法
方法
根据平差后的残 差进行周跳的探测 与修复
特点
可以发现小周跳
返回
< 整周模糊度的确定
1、静态相对定位中的常用方法
取整法 置信区间法 模糊函数法
2、快速定位中的常用方法
走走停停法 快速静态定位法
3、动态相对定位中的常用方法
初始化法 实时解算模糊度法
返回
< 1、静态相对定位中的方法
周跳的探测与修复的方法
1、屏幕扫描法 2、高次差法 3、多项式拟合法 4、MW观测值法 5、残差法
返回
<
1、屏幕扫描法
原理 人工在屏幕上观察观测值曲线的变化是否
连续 特点
费时、只能发现大周跳。由于原始的载波 观测值变化很快,通常观察的 是某种观测值的 组合
返回
<
2、高次差法
高次差法的原理 由于卫星和接收机间的距离在不断变化,因而
1、走走停停法
已知基线法 交换天线法
2、快速静态定位法
快速模糊度解算法(FARA)
返回
< 3、动态相对定位中的常用方法
1、初始化法 运动载体处于静止状态时与地面基准站一起通
过“初始化”来确定整周模糊度然后运动载体开 始运动进行定位。
5.2定位原理-整周模糊度 周跳的探测与修复
周跳的探测与修复 整周模糊度的确定
GPS原理及其应用
第一节 周跳的探测与修复
1.屏幕扫描法 2.高次差法 3. 多项式拟合法 4. MW观测值法 5. 三差法
GPS原理及其应用
1、整周跳变(周跳 – Cycle Slips)
• 在某一特定时刻的载波相位观测值为
~ (t ) N 0 Int( (t )) Fr( (t )) 其中:
C N ˆ X ˆ ˆ X CX C
N XC
ˆ ˆ XC X N ˆ
QX ˆ
ˆ
QX ˆ
NXN
ˆ m0 0 V T PV /(n u ) ; D X X D XC X N ˆ ˆ ˆ ˆ ˆ2 DX C C ;D X σ 0 Q X ˆ ˆ ˆ DX X DX X ˆN ˆC ˆNˆN ˆ ˆ X C 为坐标参数;X N 为整周未知数参数。 q Xˆ k ,l Xˆ k ,l N i ,1 N i ,1 q Xˆ k ,l Xˆ k ,l N i , 2 N i ,1 . q Xˆ Nik,n,l1 Xˆ Nik,1,l q Xˆ q Xˆ
GPS原理及其应用
周跳的探测、修复方法② (续)
• 高次差法的问题
– 接收机钟差对此方法有效性的影响
设接收机钟的稳定度为 10,接收机采样间隔为 秒, 10 15 对于L1 f L1 1.57542109 Hz) ( , 则接收机钟对相邻历元 载波相位观测值的影响 1010 151.57542109 2.36(周)。 为
GPS原理及其应用
周跳的探测、修复方法③ (续)
• 多项式拟合法的应用特点
– 由于四次差或五次差一般巳呈偶然误差特性, 无法再用函数来加以拟合,所以用多项式拟合 时通常也只需取至4—5阶即可。 – 观测值可以是真正的(非差)相位观测值,也 可以是经线性组合后的虚拟观测值:单差观测 值和双差观测值。
周跳检测与修复
GPS精密定位周跳检测与修复(Cycle slip detection and repair)完整的载波相位是由初始整周模糊度N、计数器记录的整周数INT和接收机基频信号与接到卫星信号的小于一周部分相位差Δφ.Δφ能以极高的精度测定,但这只有在N和INT都正确无误地确定情况下才有意义。
卫星在观测中失锁后,造成接收机载波整周计数INT误差,这种现象称为周跳.当重新捕获卫星后,周跳给计数器造成的偏差即为中断期间丢失的整周数,小周跳可以通过检测方法发现后并加以修复,大的周跳或较长时间的失锁,周跳不易修复,需要重新固定整周模糊度。
周跳的探测及修复对于用载波相位精密定位至关重要,成功的修复才能获得高精度的结果。
周跳产生的原因:1.卫星信号暂时阻断;2.仪器线路暂时故障;3.外界环境的突变干扰,如电离层、动态变化.检测周跳的主要方法:1.屏幕扫描法观测值中出现周跳后.相位观测值的变化率就不再连续。
凡曲线出现不规则的突然变化时,就意味着在相应的相位观测值中出现了整周跳变。
早期进行GPS相位测量的数据处理时,就是靠作业人员坐在计算机屏幕前依次对每个站、每个时段、每个卫星的相位观测值的变化率的图像进行逐段检查来探测周跳,然后再加以修复。
这种方法比较直观,在早期曾广泛使用.但由于工作繁琐枯燥乏味,而且需反复进行,所以这种手工编辑方法目前正逐步被淘汰,而很少使用了。
2.高次差或多项式拟合法由于卫星和接收机间的距离在不断变化,因而载波相位测量的观测值INT+Δφ也随时间在不断变化。
但这种变化应是有规律的、平滑的.周跳将破坏这种规律性。
根据这一特性就能将一些大的周跳寻找出来(尤其是对采样率较高的数据)。
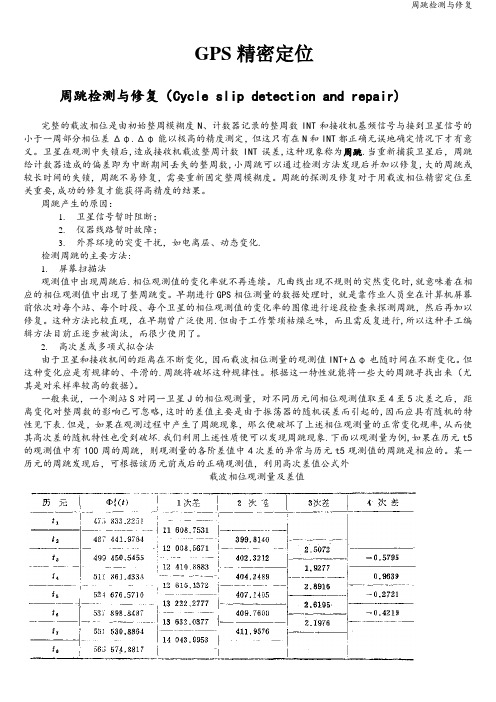
一般来说,一个测站S对同一卫星J的相位观测量,对不同历元间相位观测值取至4至5次差之后,距离变化对整周数的影响已可忽略,这时的差值主要是由于振荡器的随机误差而引起的,因而应具有随机的特性见下表.但是,如果在观测过程中产生了周跳现象,那么便破坏了上述相位观测量的正常变化规率,从而使其高次差的随机特性也受到破坏.我们利用上述性质便可以发现周跳现象.下面以观测量为例,如果在历元t5的观测值中有100周的周跳,则观测量的各阶差值中4次差的异常与历元t5观测值的周跳是相应的。
周跳的探测与修复名词解释

周跳的探测与修复名词解释引言在测量和定位领域中,周跳(Cycle Slip)是一种常见的问题,它会对定位精度和可靠性产生不良影响。
在本文中,我们将探讨周跳的概念、产生原因以及如何进行探测与修复。
一、周跳的定义周跳是指由于接收机钟差或信号传播延迟等原因,在卫星导航系统的接收机中,造成接受到的信号的载波相位产生了突变。
这种突变一般是指电子钟跳变或者观测信号在传播过程中遭受了丢失或其他异常。
二、周跳的原因1. 接收机钟差:接收机本身的时钟不准确会导致载波相位的突变。
2. 手动干扰:如操作人员故意改变接收机设置或干扰信号的传输。
3. 天线障碍物:如高大建筑物或树木遮挡导致信号传播中的多路径效应。
4. 粗略时间同步:接收机启动时粗略时间同步导致载波相位突变。
5. 大气层折射:大气层中湿度和温度的变化会引起信号的时延变化。
三、周跳的探测方法1. 先验阈值法:根据统计学原理设定一个合理的预先设定阈值,观测值超过阈值则判定发生周跳。
2. 数值差分法:通过对观测值进行一阶或二阶差分计算,如果差分值超过预先设定的阈值,则判断为周跳。
3. 马尔可夫检验法:利用马尔可夫模型对历史观测数据进行分析,预测当前观测值是否可能发生周跳。
4. 碎片检测法:通过检测载波相位的不连续性,判断是否发生周跳。
5. 卡尔曼滤波法:利用卡尔曼滤波来对观测值进行预测和修复,通过与实际观测值比较判断是否发生周跳。
四、周跳的修复方法1. 直接组合法:当周跳发生时,直接将当前观测值替换为修复值。
2. 线性插值法:通过利用两个周跳前后的观测值,根据时间差进行线性插值,得到周跳时的修复值。
3. 拟合曲线法:通过拟合周跳前后的观测值,使用合适的曲线拟合方法,得到周跳时的修复值。
4. 卡尔曼滤波法:使用卡尔曼滤波模型,通过对历史观测值进行预测和修正,得到周跳时的修复值。
结论周跳是卫星导航系统中常见的问题,会对定位和测量造成不利影响。
探测和修复周跳是确保定位精度和可靠性的关键步骤。
GPS 周跳的探测与修复解析

pq km (i 1) pq km (i)+n pq km (i+1)+n pq km (i 2)+n
pq km (i 1, i 2) pq km (i, i 1)+n pq km (i 1, i) pq km (i 2, i 1)
ti
kp (i)
p m (i) n
测距码与相位比较法
R ( tr ts )c ion trop tide rel mul c
伪距观测方程 载波相位观测方程
( tr ts )c N ion trop tide rel mul p
q k (i)
p ti 1 kp (i 1) m (i 1) n q k (i 1) q p ti 2 kp (i 2) m (i 2) n k (i 2)
三 周跳的探测与处理方法 3.1 周跳的探测 3.2 周跳的处理方法
3.1 周跳的探测(I)
Fr ( ) Int ( )
一次差 11210.0672 11608.7531 12008.5671 12410.8883 12815.1372 13222.2777 13632.0377 14043.9551
三次差
四次差
20 21 22 23 24 25 26 27 28
464623.1581 475833.2251 487441.9784 499450.5455 511861.4338 524676.5710 537898.8487 551530.8864 565574.8817
观测 历元 观测值
Fr ( ) Int ( )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS精密定位周跳检测与修复(Cycle slip detection and repair)完整的载波相位是由初始整周模糊度N、计数器记录的整周数INT和接收机基频信号与接到卫星信号的小于一周部分相位差Δφ。
Δφ能以极高的精度测定,但这只有在N和INT都正确无误地确定情况下才有意义。
卫星在观测中失锁后,造成接收机载波整周计数INT误差,这种现象称为周跳。
当重新捕获卫星后,周跳给计数器造成的偏差即为中断期间丢失的整周数,小周跳可以通过检测方法发现后并加以修复,大的周跳或较长时间的失锁,周跳不易修复,需要重新固定整周模糊度。
周跳的探测及修复对于用载波相位精密定位至关重要,成功的修复才能获得高精度的结果。
周跳产生的原因:1.卫星信号暂时阻断;2.仪器线路暂时故障;3.外界环境的突变干扰,如电离层、动态变化。
检测周跳的主要方法:1.屏幕扫描法观测值中出现周跳后。
相位观测值的变化率就不再连续。
凡曲线出现不规则的突然变化时,就意味着在相应的相位观测值中出现了整周跳变。
早期进行GPS相位测量的数据处理时,就是靠作业人员坐在计算机屏幕前依次对每个站、每个时段、每个卫星的相位观测值的变化率的图像进行逐段检查来探测周跳,然后再加以修复。
这种方法比较直观,在早期曾广泛使用。
但由于工作繁琐枯燥乏味,而且需反复进行,所以这种手工编辑方法目前正逐步被淘汰,而很少使用了。
2.高次差或多项式拟合法由于卫星和接收机间的距离在不断变化,因而载波相位测量的观测值INT+Δφ也随时间在不断变化。
但这种变化应是有规律的、平滑的。
周跳将破坏这种规律性。
根据这一特性就能将一些大的周跳寻找出来(尤其是对采样率较高的数据)。
一般来说,一个测站S对同一卫星J的相位观测量,对不同历元间相位观测值取至4至5次差之后,距离变化对整周数的影响已可忽略,这时的差值主要是由于振荡器的随机误差而引起的,因而应具有随机的特性见下表。
但是,如果在观测过程中产生了周跳现象,那么便破坏了上述相位观测量的正常变化规率,从而使其高次差的随机特性也受到破坏。
我们利用上述性质便可以发现周跳现象。
下面以观测量为例,如果在历元t5的观测值中有100周的周跳,则观测量的各阶差值中4次差的异常与历元t5观测值的周跳是相应的。
某一历元的周跳发现后,可根据该历元前或后的正确观测值,利用高次差值公式外载波相位观测量及差值推该历元的正确整周计数或者根据相邻的几个正确的相位观测量,采用n阶多项式拟合(曲线拟合)的方法来推求上述整周计数的正确值,与观测值比较,发现周跳。
由于四次差或五次差一般已呈偶然误差特性,无法再用函数来加以拟合。
所以用多项式拟合时通常也只需取至4~5项即可。
这种方法实质上和上面介绍的高次差法是相同的,只是采用这种形式较便于计算。
由于接收机振荡器的随机误差可能造成载波相位2周左右的误差,所以这一方法通常只能发现较大的周跳(例如>5周),而对于较小周跳的分析方法可参阅其它方法。
含有周跳观测值和差值3.卫星间求差第一种方法由于受到接收机振荡器的随机误差的影响,难以解决小周跳的问题,于是人们自然想到了在卫星间求差的方法。
在GPS测量中,每一瞬间要对多颗卫星进行观测,因而在每颗卫星的载波相位测量观测值中,所受到的接收机振荡器的随机误差的影响是相同的。
在卫星间求差后即可消除此项误差的影响。
现仍以观测值的高次差分为例来予以说明。
下表中给出了SV6、SV8和SVll三颗卫星的相位观测量观测值的四次差。
其中SV6从第106个观测值起均丢失了一周。
结果使第105、106的四次差差了3周,104、107的四次差各差了1周。
但由于接收机振荡器的噪声水平也达到几周,因而难以发现。
在卫星间求差后由于消除了接收机钟的随机误差的影响,残留下来的值很小,就可能发现小周跳。
这种做法实际上就是对单差相位观测值(在卫星间求差)的高阶差分进行分析比较来发现周跳。
利用这种方法可以发现与卫星有关的周跳,例如某一卫星信号被短暂中断,而其余卫星则在被连续观测,但不一定能发现与接收机有关的周跳,例如由于接收机线路的瞬时故障而使所有卫星均发生周跳。
在这种情况下就可以通过对双差相位观测值(在卫星及接收机间求差)的高阶差分进行分析比较来发现小的周跳。
采用双差观测值还可以进一步消除卫星振荡器的随机误差影响。
发现周跳后即可利用前面的正确观测值及各阶差分进行外插,求出正确的整周记数。
4. 平差后残差分析经过上述处理的观测值中还可能存在一些未被发现的小周跳。
修复后的观测值中也可能引入1~2周的偏差(相当于仍存在周跳)。
用这些观测值来进行平差计算,求得各观测值的残差。
由于载波相位测量的观测精度很高,因而这些残差的数值一般均很小。
有周跳的观测值上则会出现很大的残差。
据此即可发现和改正周跳。
上述过程往往需要反复进行多次,每次都采用新近获得的平差值(基线向量等)和改正了周跳后的观测值来进行,直至残差符合要求为止。
这样就能获得一组无周跳的“干净的”载波相位测量观测值。
由于三差解中消去了整周未知数N 。
,因而常被采用。
探测和修复周跳的方法很多,究竞采用何种方法要据具体情况而定。
如双频观测值利用电离层延迟来寻找和修复周跳也很简便有效。
在开始时可采用较简便精度不高的方法,旨在发现和修复大周跳。
然后再采用精度较高的公式来寻找并修复小周跳,并通过残差来加以检验。
整周模糊度的确定方法准确和快速地解算数周模糊度,无论对于保障相对定位的精度或对于缩短观测时间以提高作业效率来说,都是极其虽要的。
目前解算整周模糊度的方法有多种,如果按解算所需时间的长短来区分,则可分为经典静态相对定位法和快速解算法。
经典静态相对定位法,即将整模糊度作为待定量与其它未知参数在平差计算中一并求解。
如上所述,这时为了提高解的可靠性,所需的观测时间较长。
整周模糊度的快速解算法,主要包括交换天线法、P 码双频技术、滤波法和模糊函数法,只需几分钟。
一、 伪距法若可观测载波相位,也可进行伪距测量,有)]([t INT N ϕλρλ+-=上式由伪距观测量和载波观测值一并求定模糊度N 。
由于伪距测量的精度较低,根据一个或少数几个伪距观测值还无法求得正确的N ,必须有较多的差值λN 取平均后才有可能获得正确的整波段数。
为了正确解算N ,λN 的均值的精度必须优于λ/2=10cm ,同时采用P 码,SPS 用户则不行。
二、 待定参数估计法利用载波相位精密定位,最主要的是正确确定整周模糊度,而设站时间被当成次要问题。
通常采用的方法是把整周模糊度也当作平差计算中的待定参数来加以估计和确定。
根据基线的长度不同一般可采用两种方法。
1. 整数解我们知道整周模糊度从理论上讲应该是一个整数,利用这一特性能提高解的精度。
短基线定位时一般采用这种方法。
其具体步骤如下:(1)根据卫星位置和修复了周跳后的干净的相位观测值进行平差计算,求得基线向量和整周未知数。
由于各种误差的影响,解得的整周未知数往往不是一个整数,我们将其称为实数解。
(2)然后再采用某些方法将其固定为整数,并重新进行平差计算。
在计算中整周未知数采用整周值并视为已知数。
以求得基线向量的最后值。
将实数值固定为整数时通常可采用下列三种方法:①最简单的方法是直接将实数解四舍五入,凑整为最接近的整数。
②从数理统计的观点来检核看看把实数解凑整为整数是否合理。
如果该整数位于置信区间内(实数解N ±3m 的范围内,m 为实数解N 的标准方差,此时的置信水平为99.56%),就认为这种凑整是合理的,整数解巳求出。
否则便认为解算失败,无法固定为整数。
③如果在N ±3m 的范围内有不止一个整数,这时就应将该范国内的所有整数均当作候选值,然后将所有卫星的候选值组成不同的组合一一进行试验。
每次试验时均将整周模糊度当作已知值,平差中能产生最小标准方差的那一组整周模糊度被取作最后解。
2.实数解当基线较长时,误差的相关性将降低,许多误差消除得不够完善。
所以无论是基线向量还是整周模糊度,均无法估计得很准确。
在这种情况下再将整周未知数固定为其一整数往往无实际意义,只是徒然增加工作量而已。
所以通常就将实数解作为最后解。
采用经典方法解算整周模糊度时,为了能正确求得这些参数,往往需要一个小时甚至更长的观测时间,从而影响了GPS定位的作业效率,所以只能在高精度定位的领域中得以应用,而在图根控制、地籍测量、普通工程测量等领域内还不能成为经典测量仪器的真正竞争者。
三、三差法(多普勒法)连续跟踪的所有载波相位测量观测值中均含有相同的整周模糊度N。
因而将相邻两个观测历元的载波相位相减时就将该未知参数消去,从而直接解出坐标参数。
这就是我们所熟悉的多普勒法。
但两个历元之间的载波相位观测值之差(即这两个历元间的积分多普勒值)受到此期间接收机钟及卫星钟的随机误差的影响,而且几何图形强度也较弱,所以精度不太好,往往仅被用来解算未知参数的初始值。
三差法不仅用在观铡历元间求差,还用在卫星及接收机间求差,可以消除更多的误差,所以使用得较为广泛。
但在消除整周模糊度这一点上存在着与多曾勒法相同的缺陷,获得的结果精度也不够理想。
四、走走停停法(go and stop)静态测量花费较长时间观测实际上就是要准确确定整周模糊度所需的时间。
要提高GPS测量的作业效率,加快定位速度,关键在于如何快速确定整周模糊度。
1986年B.Remondi提出了所谓的“动态”测量法,其基本思想为:既然在保持连续跟踪的所有载波相位观测值中都含有同样的整周模糊度,那么只要首先设法确定这些整周模糊度并在随后的迁站过程中继续保持对卫星的跟踪,当接收机到达新的测站后就不需要再确定整周未知数了。
这样在新点上只需进行2~3分钟的观测便可精确确定基线向量。
采用这种方法时通常将一台接收机设置在巳知点上不动进行连续观测(称为固定接收机),其余接收机(一台或若干台)在确定好整周模糊度后,按预定计划依次迁往各待定点(称为流动接收机),当然在迁站过程中各接收机均要保持对卫星的连续跟踪。
需要说明的是由于各流动接收机均需和固定接收机进行相对定位,所以确定的模糊度实际是流动接收机与固定接收机之间的模糊度之差。
五、两次设站法(往返式重复设站)在短基线的静态定位中之所以要观测一小时或更长的时间,其主要原因是在较长的时间内卫星的几何图形有较大的变化,致使法方程式有较好的状态参数,因而能正确确定整周模糊度和基线矢量。
此外,较长的观测时间段也能大大削弱某些系统误差的影响(如多路径误差的影响等),但对于削弱测量噪声并无多大实际意义,因为载波相位测量噪声仅为l~2mm。
于是人们自然会想到只要有少量观测值分布在较长的观测时间段上就朗达到上述目的。
对实际观测资料处理的结果表明,只需要在观测时间段的开始和结束处有几量观测值。
就足以把整周模糊度固定为整数值。