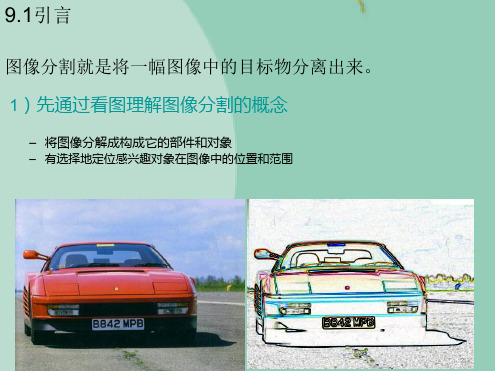
图像分割 第三讲
合集下载
第七章 图像分割_PPT课件
•关键点
– 鲁棒局部特征,抗变形能力强,适用于匹配
• 7.3 阈值法 —— 全局阈值法
• 思路
– 将分割问题视为面向每一个像素的分类问题,通常使用简单的阈 值不等式判断像素的类别。
• 条件
– 待分割区域与背景区域在像素级特征上存在明显的差异,而两个 区域内部像素在统计上各自具有较强的相似性。从特征直方图上 看,具有明显的双峰分布的图像比较适合使用阈值法进行分割
• 自然图像理解
• 7.2 图像特征概述
•亮度 •直方图 •变换系数 •边缘 •纹理 •关键点
• 7.2 图像特征概述
•亮度
– 空间连续性,稠密性,直观,敏感性
•直方图
– 统计特征,抗线性几何变换
•变换系数
– 频域统计特征,提供一种完全不同的视角
•边缘
– 符合视觉习惯,是形状信息的基础
•纹理
– 局部不连续性和全局相似性的统一
• 7.3 阈值法 —— 全局阈值法
• 如何确定阈值T?
–迭代法 –大津法 (OTSU) –最优阈值法 –最大熵法 –众数法 –矩不变法 ……
• 7.3 阈值法 —— 全局阈值法
• 迭代阈值法
1)选取一个的初始估计值T; 2)用T分割图像。这样便会生成两组像素集合:G1由所有灰度值大 于T的像素组成,而G2由所有灰度值小于或等于T的像素组成。 3)对G1和G2中所有像素计算平均灰度值u1和u2。 4)计算新的阈值:T=1/2(u1 + u2)。 重复步骤(2)到(4),直到T值更新后产生的偏差小于一个事先定 义的参数T0。
• 从优化的角度看,迭代阈值法的目标函数:
• 7.3 阈值法 —— 全局阈值法
• 大津法(OTSU) – 寻找使类间离散度最大化的阈值T – 类间离散度的数学定义
– 鲁棒局部特征,抗变形能力强,适用于匹配
• 7.3 阈值法 —— 全局阈值法
• 思路
– 将分割问题视为面向每一个像素的分类问题,通常使用简单的阈 值不等式判断像素的类别。
• 条件
– 待分割区域与背景区域在像素级特征上存在明显的差异,而两个 区域内部像素在统计上各自具有较强的相似性。从特征直方图上 看,具有明显的双峰分布的图像比较适合使用阈值法进行分割
• 自然图像理解
• 7.2 图像特征概述
•亮度 •直方图 •变换系数 •边缘 •纹理 •关键点
• 7.2 图像特征概述
•亮度
– 空间连续性,稠密性,直观,敏感性
•直方图
– 统计特征,抗线性几何变换
•变换系数
– 频域统计特征,提供一种完全不同的视角
•边缘
– 符合视觉习惯,是形状信息的基础
•纹理
– 局部不连续性和全局相似性的统一
• 7.3 阈值法 —— 全局阈值法
• 如何确定阈值T?
–迭代法 –大津法 (OTSU) –最优阈值法 –最大熵法 –众数法 –矩不变法 ……
• 7.3 阈值法 —— 全局阈值法
• 迭代阈值法
1)选取一个的初始估计值T; 2)用T分割图像。这样便会生成两组像素集合:G1由所有灰度值大 于T的像素组成,而G2由所有灰度值小于或等于T的像素组成。 3)对G1和G2中所有像素计算平均灰度值u1和u2。 4)计算新的阈值:T=1/2(u1 + u2)。 重复步骤(2)到(4),直到T值更新后产生的偏差小于一个事先定 义的参数T0。
• 从优化的角度看,迭代阈值法的目标函数:
• 7.3 阈值法 —— 全局阈值法
• 大津法(OTSU) – 寻找使类间离散度最大化的阈值T – 类间离散度的数学定义
边缘检测与图像分割精品PPT课件
例1:检测不连续性
例2:检测相似性
7.2 阈值分割
7.2.1 阈值分割原理与分类
7.2.2 阈值选取方法
7.3 边缘检测
7.3.1 边缘检测概念
7.3.2 基于一阶导数法的边缘检测
基于二阶导数法的边缘检测
7.4 区域分割
7.4.1 区域生长法
7.4.2 分裂合并法
7.5 直线检测
阈值分割法的特点:
适用于物体与背景有较强对比的情况,重要的是背景或 物体的灰度比较单一。(可通过先求背景,然后求反得 到物体)
这种方法总可以得到封闭且连通区域的边界。
显然对于阈值分割方法,确定一个最优阈值是分割的关键问题, 现有的大部分算法都是集中在阈值确定的研究上。
常用的阈值分割就是图像的二值化,选择一阈值(?),将图像
图像分割及其基于分割的目标表达、特征提取和参数测量等将原 始图像转化为更抽象更紧凑的形式,使得更高层的图像分析和理解成 为可能。
图像分割多年来一直得到人们的高度重视,至今已提出了上千种 各种类型的分割算法,而且近年来每年都有上百篇相关研究报道发表 。
3.图像分割的基本策略(P187)
分割算法基于灰度值的两个基本特性:不连续性和相似性。 首先检测图像像素灰度级的不连续性,找到点、线(宽度为1)、 边(不定宽度)。先找边,后确定区域。 或者,检测图像区域像素的灰度值的相似性,通过选择阈值, 找到灰度值相似的区域,区域的外轮廓就是对象的边。
gx,
y
1 0
f x, y T f x, y T
一副含有一个与背景明显对比的物体图像具 有包含双峰的灰度直方图,如图3一3所示。 两个尖峰对应于物体内部和外部较多数目的 点。两峰间的谷对应于物体边缘附近相对较 少数目的点,在类似这样的情况下,通常采 用直方图来确定灰度阐值的值。
数字图像处理与分析图像分割(课堂PPT)
下面看一下导数的求取方法。从第三章了解到,图像 中的一阶导数采用梯度算子计算,而二阶导数常使用 拉普拉斯算子得到。
13
梯度算子
一幅数字图像的一阶导数是基于各种二维梯度的近似值。图像f(x,y)在位
置(x,y)的梯度定义为下列向量:
f
F
G x
G
y
x
f
y
(10.1.3)
向量的大小:
图10.7中第一列的图 像分割显示了分割左 右黑白区域的4个斜 坡边缘的特写图。分 别被均值为0且 σ=0.0,0.1,1.0,10.0 的随机高斯噪声污染。 第二列是一阶导数图 像和灰度级剖面线。 第三列为二阶导数图 像和灰度级剖面线。
图10.7
12
这个例子很好的说明了导数对于噪声的敏感性。 那么为了对于有意义的边缘点进行分类,必须使得与 这个点相联系的灰度级变换比在这一点的背景上的变 换更为有效才行。即所作的变换应该更有利于区分边 缘点。比如,如果噪声严重的话,就要慎用导数变换。
的特征,那么特征值的分界点就是一个门限。
3
8.1 间断检测
间断检测技术包括点检测,线检测和边界检测三种。寻找间断最 一般的方法是模板检测。计算模板所包围区域的灰度级与模板系 数的乘积之和。
图像中任意点的模板响应公式(3×3模板):
Rw1z1w2z2 w9z9
9
wizi i1 图10.1 3*3模板
可以看到,
(a)
(1)图中水平和垂直的部
分都被去掉了,并且在(b)
中所有原图中接近-450的部
分产生了最强响应。
(2)加了门限之后,在(c) 中有孤立点,可以使用点检 测模板检测,然后删除,或 者使用下一章的形态学腐蚀 法删除。
13
梯度算子
一幅数字图像的一阶导数是基于各种二维梯度的近似值。图像f(x,y)在位
置(x,y)的梯度定义为下列向量:
f
F
G x
G
y
x
f
y
(10.1.3)
向量的大小:
图10.7中第一列的图 像分割显示了分割左 右黑白区域的4个斜 坡边缘的特写图。分 别被均值为0且 σ=0.0,0.1,1.0,10.0 的随机高斯噪声污染。 第二列是一阶导数图 像和灰度级剖面线。 第三列为二阶导数图 像和灰度级剖面线。
图10.7
12
这个例子很好的说明了导数对于噪声的敏感性。 那么为了对于有意义的边缘点进行分类,必须使得与 这个点相联系的灰度级变换比在这一点的背景上的变 换更为有效才行。即所作的变换应该更有利于区分边 缘点。比如,如果噪声严重的话,就要慎用导数变换。
的特征,那么特征值的分界点就是一个门限。
3
8.1 间断检测
间断检测技术包括点检测,线检测和边界检测三种。寻找间断最 一般的方法是模板检测。计算模板所包围区域的灰度级与模板系 数的乘积之和。
图像中任意点的模板响应公式(3×3模板):
Rw1z1w2z2 w9z9
9
wizi i1 图10.1 3*3模板
可以看到,
(a)
(1)图中水平和垂直的部
分都被去掉了,并且在(b)
中所有原图中接近-450的部
分产生了最强响应。
(2)加了门限之后,在(c) 中有孤立点,可以使用点检 测模板检测,然后删除,或 者使用下一章的形态学腐蚀 法删除。
图像分割第三讲课件

可以增加波峰的高度。 算法的实现: 1 )对图像进行梯度计算,得到梯度图像。 2)得到梯度值最大的那一部分(比如10%)的像素直方图。 3)通过直方图的谷底,得到阈值T。
另外,也可以用拉普拉斯算子不通过直方图,直接得到阈值,方法是使 用拉普拉斯算子过滤图像,将0跨越点对应的灰度值为阈值T。
3 最佳國值
四、区域分割
1 区域生长法——原理
✓将具有相似性质的像素集合起来构成区域。
✓先对每个需要分割的区域找一个种子像素作为生长的起点, 然后将种子像素周围邻域中与种子像素具有相同或相似性 质的像素合并到这一区域中。
✓将这些新像素当做新的种子像素继续进行上面的过程,直 到再没有满足条件的像素可被包括进来。这样一个区域就 长成了。
由结果可以看出, 本例原图像中存在 着三条曲线,两条 从顶端开始,一条 从中间开始。然 而,如果不用跟踪 法,只用一种阈值 d或t检测均不能得 到满意的结果。
注意:
. 检测和跟踪所选择的特征可以不是灰度级,而是其他反映局部性质的量, 例如对比度、梯度等。此外,每个点所对应的邻域也可以取其他的定义, 不一定是紧邻的下一行像素,稍远一些的领域也许对于弥合曲线的间隙 更有好处。
1 t1≤f(x,y)≤t2 g(x,y)=
0 其它
某种特殊情况下,高于阈值t的象素保持原灰度级,其它象素都 变为0,称为半阈值法,分割后的图像可表示为:
f(x,y) f(x,y)≥t g(x,y)=
0 其它
國值的选取:
1 双峰法國值单直方图分割法
60年代中期, Prewitt提出了直方图双峰法,即如果灰度级直方图呈 明显的双峰状,则选取两峰之间的谷底所对应的灰度级作为阈值。
1 图像二值化
设原始图像f(x,y),以一定的准则在f(x,y)中找出一个合适的灰度值, 作为阈值t,则分割后的图像g(x,y),可由下式表示:
另外,也可以用拉普拉斯算子不通过直方图,直接得到阈值,方法是使 用拉普拉斯算子过滤图像,将0跨越点对应的灰度值为阈值T。
3 最佳國值
四、区域分割
1 区域生长法——原理
✓将具有相似性质的像素集合起来构成区域。
✓先对每个需要分割的区域找一个种子像素作为生长的起点, 然后将种子像素周围邻域中与种子像素具有相同或相似性 质的像素合并到这一区域中。
✓将这些新像素当做新的种子像素继续进行上面的过程,直 到再没有满足条件的像素可被包括进来。这样一个区域就 长成了。
由结果可以看出, 本例原图像中存在 着三条曲线,两条 从顶端开始,一条 从中间开始。然 而,如果不用跟踪 法,只用一种阈值 d或t检测均不能得 到满意的结果。
注意:
. 检测和跟踪所选择的特征可以不是灰度级,而是其他反映局部性质的量, 例如对比度、梯度等。此外,每个点所对应的邻域也可以取其他的定义, 不一定是紧邻的下一行像素,稍远一些的领域也许对于弥合曲线的间隙 更有好处。
1 t1≤f(x,y)≤t2 g(x,y)=
0 其它
某种特殊情况下,高于阈值t的象素保持原灰度级,其它象素都 变为0,称为半阈值法,分割后的图像可表示为:
f(x,y) f(x,y)≥t g(x,y)=
0 其它
國值的选取:
1 双峰法國值单直方图分割法
60年代中期, Prewitt提出了直方图双峰法,即如果灰度级直方图呈 明显的双峰状,则选取两峰之间的谷底所对应的灰度级作为阈值。
1 图像二值化
设原始图像f(x,y),以一定的准则在f(x,y)中找出一个合适的灰度值, 作为阈值t,则分割后的图像g(x,y),可由下式表示:
最新图像检测与处理技术第5章图像分割PPT课件

若一幅图像由亮背景和黑目标组成,则已知目标占图像的 (100-p)%的像素阈值化后匹配为目标的最高灰度,将选做用于 二值化处理的阈值。
16
第5章 图 像 分 割
5.1.3 最大类间/ 类内方差比法 从统计意义上讲,方差是表征数据分布不均衡的统计量,
要通过阈值对两类问题进行分割,显然,适当的阈值使得两类 数据间的方差越大越好,这表明该阈值的确能将两类不同的问 题区分开来;同时希望属于同一类问题的数据之间的方差越小 越好,这样可表明同一类问题具有一定的相似性。因此可以采 用最大类间/类内方差比来作为选择阈值的评价参数。
22
第5章 图 像 分 割
与阈值分割类似,聚类方法也是一种全局的方法,比基于 边缘检测的方法更抗噪声。
在前面介绍的方法中,一般要求类别数已知。在实际图像 分割中,我们可能不具备任何有关模式的先验知识,既不知道 它的分布,也不知道它该分成多少类,当然更不知道各类的参 数,如均值、方差等,这时,集群分类方法就显示出它解决此 类问题的独特优越性。集群分类的方法很多,在此只介绍最基 本的K-均值聚类方法。
分割后的前景目标与背景两个类间的差异最大为最佳分割。在 这里两个类别(目标与背景)的差异,用两个类别中心与阈值之 间的距离差来度量。
根据以上的思想,类间最大距离法的具体步骤如下: ① 给定一个初始阈值Th= Th0,将图像分为C1、C2两类。 ② 分别按照式
i
1
f(x,y)
NCi (x,y)Ci
所谓聚类方法,是采用模式识别中的聚类思想,以类内保 持最大相似性以及类间保持最大距离为目标,通过迭代优化获 得最佳的图像分割阈值。
23
第5章 图 像 分 割
根据以上的设计思想,聚类法的具体步骤如下:
① 给定一个初始的代表两个类别C1、C2的中心灰度值μ1、
16
第5章 图 像 分 割
5.1.3 最大类间/ 类内方差比法 从统计意义上讲,方差是表征数据分布不均衡的统计量,
要通过阈值对两类问题进行分割,显然,适当的阈值使得两类 数据间的方差越大越好,这表明该阈值的确能将两类不同的问 题区分开来;同时希望属于同一类问题的数据之间的方差越小 越好,这样可表明同一类问题具有一定的相似性。因此可以采 用最大类间/类内方差比来作为选择阈值的评价参数。
22
第5章 图 像 分 割
与阈值分割类似,聚类方法也是一种全局的方法,比基于 边缘检测的方法更抗噪声。
在前面介绍的方法中,一般要求类别数已知。在实际图像 分割中,我们可能不具备任何有关模式的先验知识,既不知道 它的分布,也不知道它该分成多少类,当然更不知道各类的参 数,如均值、方差等,这时,集群分类方法就显示出它解决此 类问题的独特优越性。集群分类的方法很多,在此只介绍最基 本的K-均值聚类方法。
分割后的前景目标与背景两个类间的差异最大为最佳分割。在 这里两个类别(目标与背景)的差异,用两个类别中心与阈值之 间的距离差来度量。
根据以上的思想,类间最大距离法的具体步骤如下: ① 给定一个初始阈值Th= Th0,将图像分为C1、C2两类。 ② 分别按照式
i
1
f(x,y)
NCi (x,y)Ci
所谓聚类方法,是采用模式识别中的聚类思想,以类内保 持最大相似性以及类间保持最大距离为目标,通过迭代优化获 得最佳的图像分割阈值。
23
第5章 图 像 分 割
根据以上的设计思想,聚类法的具体步骤如下:
① 给定一个初始的代表两个类别C1、C2的中心灰度值μ1、
第三讲 图像处理与机器视觉(ppt)
DB = f(DA) = aDA + b a>1: 对比度增强; 0<a<1:对比度减弱 a=1 & b0: 灰度偏移; a<0: 对比度倒向.
2)代数运算(Algebraic operation) C(x,y) = A(x,y) + B(x,y):降噪平均;双暴光效应等。 C(x,y) = A(x,y) - B(x,y):背景消减;运动检测等。 3)几何运算(Geometric operation)
视觉信息处理的三个阶段
按视觉信息的表示,可将视觉信息处理分为三个阶段 1、初始简图(primal sketch) 检测亮度的变化,表示并分析局部的几何 结构,以及检测光源、强光部和透明度等照明 效应等,这一步得到的表示称为初始简图。 未处理的初始简图:边缘、线、点等基元图。 完全的初始简图:对原始的基元进行选择、 聚合和概括等过程来构成更大更为抽象的标记。 2、2.5维简图 建立包括表面朝向,观察者的距离,以及 朝向和距离的不连续性,表面的反射情况,以 及对主要照明情况的某种粗略的描述。初始简 图和2.5维简图都是在以观察者为中心的坐标系 中构成的。 3、三维模型 被观察形状的三维结构组织在以物体为中心的坐 标系中的表示,以及在这种坐标系下对物体表面性质的 一些描述。
§3.4 图像处理的类别和特点
★ 图像处理的类别
(1)图像预处理——改善象质,以便于目视判读。 校正技术:对形状变形的图象进行几何校正、辐射校正。 增强技术:去除干扰,突出主要特征,包括:平滑与锐化 技术。
恢复技术:1)去除噪音干扰,恢复原图像;2)运动模糊
图像、退化图像的恢复、相位恢复等。 (2)图像分析:图像分割,纹理分析,平面几何参数,三维参 数测量技术等。 (3)图像编码与压缩:PCM(脉冲编码调制),统计编码,预 测编码,变换编码,无损压缩,有损编码等;图像编码的国际 标准,图像压缩的国际标准。
2)代数运算(Algebraic operation) C(x,y) = A(x,y) + B(x,y):降噪平均;双暴光效应等。 C(x,y) = A(x,y) - B(x,y):背景消减;运动检测等。 3)几何运算(Geometric operation)
视觉信息处理的三个阶段
按视觉信息的表示,可将视觉信息处理分为三个阶段 1、初始简图(primal sketch) 检测亮度的变化,表示并分析局部的几何 结构,以及检测光源、强光部和透明度等照明 效应等,这一步得到的表示称为初始简图。 未处理的初始简图:边缘、线、点等基元图。 完全的初始简图:对原始的基元进行选择、 聚合和概括等过程来构成更大更为抽象的标记。 2、2.5维简图 建立包括表面朝向,观察者的距离,以及 朝向和距离的不连续性,表面的反射情况,以 及对主要照明情况的某种粗略的描述。初始简 图和2.5维简图都是在以观察者为中心的坐标系 中构成的。 3、三维模型 被观察形状的三维结构组织在以物体为中心的坐 标系中的表示,以及在这种坐标系下对物体表面性质的 一些描述。
§3.4 图像处理的类别和特点
★ 图像处理的类别
(1)图像预处理——改善象质,以便于目视判读。 校正技术:对形状变形的图象进行几何校正、辐射校正。 增强技术:去除干扰,突出主要特征,包括:平滑与锐化 技术。
恢复技术:1)去除噪音干扰,恢复原图像;2)运动模糊
图像、退化图像的恢复、相位恢复等。 (2)图像分析:图像分割,纹理分析,平面几何参数,三维参 数测量技术等。 (3)图像编码与压缩:PCM(脉冲编码调制),统计编码,预 测编码,变换编码,无损压缩,有损编码等;图像编码的国际 标准,图像压缩的国际标准。
数字图像处理-图像分割课件

差分定义:
xfi,jfi,jfi1,j yfi,jfi,jfi,j1
梯度算子 梯度是图像处理中最为常用的一次微分方法。
图像函数 fx,y在点 x, y 的梯度幅值为
f 2 x
fy2
其方向为 arctgf y
f x
图像经过梯度运算能灵敏地检测出边界, 但是梯度运算 比较复杂。
对于数字图像,可用一阶差分替代一阶微分:
非连续性分割: 首先检测局部不连续性,然后将它们 连接起来形成边界,这些边界把图像分以不同的区域。 这种基于不连续性原理检出物体边缘的方法称为基于 点相关的分割技术
两种方法是互补的。有时将它们地结合起来,以求 得到更好的分割效果。
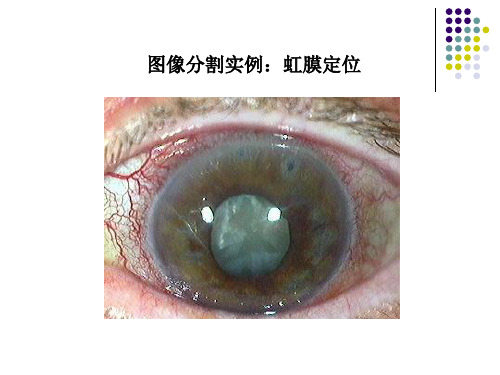
人眼图像示例
分类—连续性与处理策略 连续性: 不连续性: 边界 相似性: 区域 处理策略: 早期处理结果是否影响后面的处理 并行: 不 串行: 结果被其后的处理利用 四种方法 并行边界;串行边界;并行区域;串行区域
n
(1) Ri
i1
(2)对所有的 i和j, i j, 有Ri R j
(3)对i 1,2,..., n, 有P ( Ri ) true (4)对i j, 有P ( Ri R j ) false (5)对i 1,2,..., n, Ri 是连通的区域
分类—分割依据
相似性分割: 将相似灰度级的像素聚集在一起。形成 图像中的不同区域。这种基于相似性原理的方法也称 为基于区域相关的分割技术
高斯拉普拉斯(LOG)
高斯拉普拉斯(Laplacian of Gaussian, LOG, 或 Mexican hat, 墨西哥草帽)滤波器使用了Gaussian 来进行噪声去除并使用 Laplacian来进行边缘检测
高斯拉普拉斯举例
xfi,jfi,jfi1,j yfi,jfi,jfi,j1
梯度算子 梯度是图像处理中最为常用的一次微分方法。
图像函数 fx,y在点 x, y 的梯度幅值为
f 2 x
fy2
其方向为 arctgf y
f x
图像经过梯度运算能灵敏地检测出边界, 但是梯度运算 比较复杂。
对于数字图像,可用一阶差分替代一阶微分:
非连续性分割: 首先检测局部不连续性,然后将它们 连接起来形成边界,这些边界把图像分以不同的区域。 这种基于不连续性原理检出物体边缘的方法称为基于 点相关的分割技术
两种方法是互补的。有时将它们地结合起来,以求 得到更好的分割效果。
人眼图像示例
分类—连续性与处理策略 连续性: 不连续性: 边界 相似性: 区域 处理策略: 早期处理结果是否影响后面的处理 并行: 不 串行: 结果被其后的处理利用 四种方法 并行边界;串行边界;并行区域;串行区域
n
(1) Ri
i1
(2)对所有的 i和j, i j, 有Ri R j
(3)对i 1,2,..., n, 有P ( Ri ) true (4)对i j, 有P ( Ri R j ) false (5)对i 1,2,..., n, Ri 是连通的区域
分类—分割依据
相似性分割: 将相似灰度级的像素聚集在一起。形成 图像中的不同区域。这种基于相似性原理的方法也称 为基于区域相关的分割技术
高斯拉普拉斯(LOG)
高斯拉普拉斯(Laplacian of Gaussian, LOG, 或 Mexican hat, 墨西哥草帽)滤波器使用了Gaussian 来进行噪声去除并使用 Laplacian来进行边缘检测
高斯拉普拉斯举例
第三章 图像分割与边缘检测PPT课件
模板匹配常用的一种测度为模板与原图像对应区域的误差平
方和。设f(x, y)为M×N的原图像,t(j,k)为J×K(J≤M,K≤N)的模板
图像,
J 1K 1
D (x,y) [f(xj,yk)t(j,k)2](3-7)
j 0k 0
36
当D(x, y)值很小时,便可认为模板与图像是匹配的。应用时常 用归一化互相关作为误差平方和测度, 其定义为
31
(a)
(b)
(c)
图3-10 3×3邻域起始搜索方向
32
在3×3邻域中搜索到的第一个与当前像素值相同的像素便为 新的边界点An,同时更新变量dir为新的方向值。
步骤3:如果An等于第二个边界点A1且前一个边界点An-1等于 第一个边界点A0,则停止搜索,结束跟踪,否则重复步骤2继续 搜索。
步骤4:由边界点A0、A1、A2、…、An-2构成的边界便为要 跟踪的边界。
24
图3-8 用Prewitt算子进行边缘检测的结果
25
3.2.2 高斯-拉普拉斯(LOG)算子
噪声点对边缘检测有较大的影响,效果更好的边缘检测器是高 斯-拉普拉斯(LOG)算子。它把高斯平滑滤波器和拉普拉斯锐化滤波 器结合起来,先平滑掉噪声,再进行边缘检测,所以效果更好。
常用的LOG算子是5×5的模板:
设图像总像素数为N,灰度值为i的像素数为Ni,则至灰度级 K的灰度分布的0阶矩及1阶矩分别定义为
0阶矩:
(k) K Ni i0 N
(3-2)
10
1阶矩:
(k) K iNi i0 N
(3-3)
当K=L-1时,ω(L-1)=1;μ(L-1)=μT,μT称为图像的平均灰度。
设有M-1个阈值:0≤k1<k2<…<KM-1≤L-1。
方和。设f(x, y)为M×N的原图像,t(j,k)为J×K(J≤M,K≤N)的模板
图像,
J 1K 1
D (x,y) [f(xj,yk)t(j,k)2](3-7)
j 0k 0
36
当D(x, y)值很小时,便可认为模板与图像是匹配的。应用时常 用归一化互相关作为误差平方和测度, 其定义为
31
(a)
(b)
(c)
图3-10 3×3邻域起始搜索方向
32
在3×3邻域中搜索到的第一个与当前像素值相同的像素便为 新的边界点An,同时更新变量dir为新的方向值。
步骤3:如果An等于第二个边界点A1且前一个边界点An-1等于 第一个边界点A0,则停止搜索,结束跟踪,否则重复步骤2继续 搜索。
步骤4:由边界点A0、A1、A2、…、An-2构成的边界便为要 跟踪的边界。
24
图3-8 用Prewitt算子进行边缘检测的结果
25
3.2.2 高斯-拉普拉斯(LOG)算子
噪声点对边缘检测有较大的影响,效果更好的边缘检测器是高 斯-拉普拉斯(LOG)算子。它把高斯平滑滤波器和拉普拉斯锐化滤波 器结合起来,先平滑掉噪声,再进行边缘检测,所以效果更好。
常用的LOG算子是5×5的模板:
设图像总像素数为N,灰度值为i的像素数为Ni,则至灰度级 K的灰度分布的0阶矩及1阶矩分别定义为
0阶矩:
(k) K Ni i0 N
(3-2)
10
1阶矩:
(k) K iNi i0 N
(3-3)
当K=L-1时,ω(L-1)=1;μ(L-1)=μT,μT称为图像的平均灰度。
设有M-1个阈值:0≤k1<k2<…<KM-1≤L-1。
数字图像处理第九章图像分割(共94张精选PPT)
如果选择使用二阶导数,则边缘点定义为它的二阶
导数的零交叉点。
分割的关键问题是如何将边缘线段组合成更长的
边缘。
应该注意到,这些定义并不能保证在一幅图像中成功地找
到边缘。它们只是给了一个寻找边缘的形式体系。
边缘检测基本步骤
滤波:改善与噪声有关的边缘检测器的性能;一般滤波
器降噪导致了边缘的损失;增强边缘和降低噪声之间
转换为黑白二值图像,
0
f (x, y) T
g(x, y) =
255 f (x, y) T
以上原理用MATLAB实现很简单,其实是将图像中所有的灰
阶值与T相比较,大于T的返回1,小于T的返回0,我们得到一
个只有0和1的矩阵,将其显示为图像,就是一幅二值图像。
可以用函数im2bw来实现上述操作。
, 具有最大
的k即是最佳阈值.
用h(x,y)对图像f(x,y)的平滑可表示为:
一阶
二阶
边缘和导数
阶跃边缘、脉冲边缘、屋顶边缘的灰度剖面
线及其一阶、二阶导数。
边缘点的判定
判断一个点是否为边缘点的条件:该点的灰度变
化(一阶导数)必须比指定的门限大。
一组这样的依据事先定好的连接准则相连的边缘
点就定义为一条边缘。
希望得到的特点)
(2)一条连接极值点的虚构直线将在边缘中点附近穿过,
该性质对于确定粗边线的中心非常有用。
图象
剖面
1.在ρ、θ的极值范围内对其分别进行m,n等分,设一个二维数组的下标与ρi、θj的取值对应;
边缘检测判据是二阶导数零交叉点并对应一阶导数的峰值.
tr=uint8(r.
(3) 边缘的“宽度”取决于斜坡的长度.
L 1
导数的零交叉点。
分割的关键问题是如何将边缘线段组合成更长的
边缘。
应该注意到,这些定义并不能保证在一幅图像中成功地找
到边缘。它们只是给了一个寻找边缘的形式体系。
边缘检测基本步骤
滤波:改善与噪声有关的边缘检测器的性能;一般滤波
器降噪导致了边缘的损失;增强边缘和降低噪声之间
转换为黑白二值图像,
0
f (x, y) T
g(x, y) =
255 f (x, y) T
以上原理用MATLAB实现很简单,其实是将图像中所有的灰
阶值与T相比较,大于T的返回1,小于T的返回0,我们得到一
个只有0和1的矩阵,将其显示为图像,就是一幅二值图像。
可以用函数im2bw来实现上述操作。
, 具有最大
的k即是最佳阈值.
用h(x,y)对图像f(x,y)的平滑可表示为:
一阶
二阶
边缘和导数
阶跃边缘、脉冲边缘、屋顶边缘的灰度剖面
线及其一阶、二阶导数。
边缘点的判定
判断一个点是否为边缘点的条件:该点的灰度变
化(一阶导数)必须比指定的门限大。
一组这样的依据事先定好的连接准则相连的边缘
点就定义为一条边缘。
希望得到的特点)
(2)一条连接极值点的虚构直线将在边缘中点附近穿过,
该性质对于确定粗边线的中心非常有用。
图象
剖面
1.在ρ、θ的极值范围内对其分别进行m,n等分,设一个二维数组的下标与ρi、θj的取值对应;
边缘检测判据是二阶导数零交叉点并对应一阶导数的峰值.
tr=uint8(r.
(3) 边缘的“宽度”取决于斜坡的长度.
L 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本节内容:
• • • • • 图像分割概述 阈值分割 边缘检测 区域分割 Hough变换检测法
一、图像分割概述
分割的目的是把图象空间分成一些有意义的区域,是实 现图像自动识别与理解的必不可少的过程,是计算机视觉 的中间层次。 例如,一幅航空照片,可以分割成工业区、住宅区、 湖泊、森林等等。
可以以逐个象素为基础去研究图象分割,也可以利用 在规定邻域中的某些图象信息去分割。 分割的依据可建立在相似性和非连续性两个基本概念 之上。
g(x,y)=
f(x,y) 0 其它
f(x,y)≥t
阈值分割图像的基本原理,可用下式表示:
g(x,y)=
ZE
f(x,y)∈Z
阈值
ZB
其它
阈值的选取是阈值分割技术的关键,如果过高,则过多的目标点被 误归为背景;如果阈值过低,则会出现相反的情况。由此可见,阈值化 分割算法主要有两个步骤: 1) 确定需要的分割阈值;2) 将分割阈值与象素值比较以划分象素。
2.图像分割的定义:
• 所谓图像分割是指将图像中具有特殊涵义的不同区域区分 开来,这些区域是互相不交叉的,每一个区域都满足特定 区域的一致性。 • 数学定义
令集合R代表整个图像区域,对R的分割可看作将R分成N个满足以下五个条件 的非空子集(子区域)R1,R2,…,RN: • ; R R • 对所有的i和j,i≠j,有Ri∩Rj =φ; • 对i = 1,2,…,N,有P(Ri) = TRUE; • 对i≠j,有P(Ri∪Rj) = FALSE; • 对i =1,2,…,N,Ri是连通的区域。 其中P(Ri)是对所有在集合Ri中元素的逻辑谓词,φ代表空集。
2 通过边界特性选择阈值
基本思想:改善直方图的波峰形状,我们只把区域边缘的像素绘入直方 图,而不考虑区域中间的像素。用微分算子,处理图像,使图像只剩下边界 中心两边的值。这样直方图的各个波峰很高、很窄、对称,且被很深的波谷 分开时,有利于选择阈值。 优点:1) 在前景和背景所占区域面积差别很大时,不会造一个灰度级的 波峰过高,而另一个过低;2)边缘上的点在区域内还是区域外的概率是相等 的,因此可以增加波峰的对称性;3)基于梯度和拉普拉斯算子选择的像素, 可以增加波峰的高度。 算法的实现: 1)对图像进行梯度计算,得到梯度图像。 2)得到梯度值最大的那一部分(比如10%)的像素直方图。 3)通过直方图的谷底,得到阈值T。 另外,也可以用拉普拉斯算子不通过直方图,直接得到阈值,方法是使 用拉普拉斯算子过滤图像,将0跨越点对应的灰度值为阈值T。
在利用阈值方法来分割灰度图像时一般都对图像有一定的假设。基于 一定的图像模型的。最常用的模型:
假设图像由具有单峰灰度分布的目标和背景组成,处于目标或背景内 部相邻象素间的灰度值是高度相关的,但处于目标和背景交界处两边的象 素在灰度值上有很大的差别。 如果一幅图像满足这些条件,它的灰度直方图基本上可看作是由分别 对应目标和背景的两个单峰直方图混合构成的。
阈值的选取:
1 双峰法阈值 •简单直方图分割法
60年代中期,Prewitt提出了直方图双峰法,即如果灰度级直方图呈 明显的双峰状,则选取两峰之间的谷底所对应的灰度级作为阈值。
P 图像灰度直方图
暗 Z1
Zi
背景
Zt Zj
目标
Zk
亮
双峰法选取阈值的缺点:会受到噪音的干扰,最小值不是预期的阈值, 而偏离期望的值。 改进办法:1)取两个峰值之间某个固定位置,如中间位置上。由于峰 值代表的是区域内外的典型值,一般情况下,比选谷底更可靠,可排除 噪音的干扰;2)加强对噪音的处理。对直方图进行平滑处理。
一、图像分割概述
典型的图像分析和理解的系统: 系统分为图像输入、预处理、图像分割(image segmentation描述
中级处理
问题
图像获取
知识库
低级处理
识别 与 解释
结果
高级处理
1.图像分割的目标:
把图像分成互不重叠的区域并提取感兴趣的目标。如下图:
N i i 1
3.图像分割的基本思路:
• 从简到难,逐级分割;
分割矩形区域 定位牌照 定位文字
• 控制背景环境,降低分割难度;
背景环境::路面、天空
• 把焦点放在增强感兴趣对象,缩小不相干图像成分的干扰上。
感兴趣的对象:汽车牌照 不相干图像成分:非矩形区域
4.图像分割的基本策略:
分割算法基于灰度值的两个基本特性:
不连续性——区域之间 相似性——区域内部 根据图像像素灰度值的不连续性:
先找到点、线(宽度为1)、边(不定宽度),再确定区域。
根据图像像素灰度值的相似性:
通过选择阈值,找到灰度值相似的区域,区域的外轮廓就是对象的边。
5.图像分割的方法:
1) 基于边缘的分割方法:先提取区域边界,再确定边界限定的区域。 2) 区域分割:确定每个像素的归属区域,从而形成一个区域图。 3) 区域生长:将属性接近的连通像素聚集成区域。 4) 分裂-合并分割:综合利用前两种方法,既存在图像的划分,又有 像元的合并。 分割对象
g(x,y)=
1 f(x,y)≥t
或 0 f(x,y)<t
g(x,y)=
1 f(x,y)≤t 0 f(x,y)>t
另外,还可以将阈值设置为一个灰度范围[t1,t2],凡是灰度在范 围内的象素都变为1,否则皆变为0,即
g(x,y)=
1 t1≤f(x,y)≤t2 0 其它
某种特殊情况下,高于阈值t的象素保持原灰度级,其它象素都 变为0,称为半阈值法,分割后的图像可表示为:
分割对象
二、阈值分割
图像阈值分割是一种广泛应用的分割技术,利用图像中要提取的目标 物与其背景在灰度特性上的差异,把图像视为具有不同灰度级的两类区域 (目标和背景)的组合,选取一个合适的阈值,以确定图像中每个象素点应 该属于目标还是背景区域,从而产生相应的二值图像。 阈值分割法的特点是:适用于物体与背景有较强对比的情况,重要的 是背景或物体的灰度比较单一;而且总可以得到封闭且连通区域的边界。 1 图像二值化 设原始图像f(x,y),以一定的准则在f(x,y)中找出一个合适的灰度值, 作为阈值t,则分割后的图像g(x,y),可由下式表示:
• • • • • 图像分割概述 阈值分割 边缘检测 区域分割 Hough变换检测法
一、图像分割概述
分割的目的是把图象空间分成一些有意义的区域,是实 现图像自动识别与理解的必不可少的过程,是计算机视觉 的中间层次。 例如,一幅航空照片,可以分割成工业区、住宅区、 湖泊、森林等等。
可以以逐个象素为基础去研究图象分割,也可以利用 在规定邻域中的某些图象信息去分割。 分割的依据可建立在相似性和非连续性两个基本概念 之上。
g(x,y)=
f(x,y) 0 其它
f(x,y)≥t
阈值分割图像的基本原理,可用下式表示:
g(x,y)=
ZE
f(x,y)∈Z
阈值
ZB
其它
阈值的选取是阈值分割技术的关键,如果过高,则过多的目标点被 误归为背景;如果阈值过低,则会出现相反的情况。由此可见,阈值化 分割算法主要有两个步骤: 1) 确定需要的分割阈值;2) 将分割阈值与象素值比较以划分象素。
2.图像分割的定义:
• 所谓图像分割是指将图像中具有特殊涵义的不同区域区分 开来,这些区域是互相不交叉的,每一个区域都满足特定 区域的一致性。 • 数学定义
令集合R代表整个图像区域,对R的分割可看作将R分成N个满足以下五个条件 的非空子集(子区域)R1,R2,…,RN: • ; R R • 对所有的i和j,i≠j,有Ri∩Rj =φ; • 对i = 1,2,…,N,有P(Ri) = TRUE; • 对i≠j,有P(Ri∪Rj) = FALSE; • 对i =1,2,…,N,Ri是连通的区域。 其中P(Ri)是对所有在集合Ri中元素的逻辑谓词,φ代表空集。
2 通过边界特性选择阈值
基本思想:改善直方图的波峰形状,我们只把区域边缘的像素绘入直方 图,而不考虑区域中间的像素。用微分算子,处理图像,使图像只剩下边界 中心两边的值。这样直方图的各个波峰很高、很窄、对称,且被很深的波谷 分开时,有利于选择阈值。 优点:1) 在前景和背景所占区域面积差别很大时,不会造一个灰度级的 波峰过高,而另一个过低;2)边缘上的点在区域内还是区域外的概率是相等 的,因此可以增加波峰的对称性;3)基于梯度和拉普拉斯算子选择的像素, 可以增加波峰的高度。 算法的实现: 1)对图像进行梯度计算,得到梯度图像。 2)得到梯度值最大的那一部分(比如10%)的像素直方图。 3)通过直方图的谷底,得到阈值T。 另外,也可以用拉普拉斯算子不通过直方图,直接得到阈值,方法是使 用拉普拉斯算子过滤图像,将0跨越点对应的灰度值为阈值T。
在利用阈值方法来分割灰度图像时一般都对图像有一定的假设。基于 一定的图像模型的。最常用的模型:
假设图像由具有单峰灰度分布的目标和背景组成,处于目标或背景内 部相邻象素间的灰度值是高度相关的,但处于目标和背景交界处两边的象 素在灰度值上有很大的差别。 如果一幅图像满足这些条件,它的灰度直方图基本上可看作是由分别 对应目标和背景的两个单峰直方图混合构成的。
阈值的选取:
1 双峰法阈值 •简单直方图分割法
60年代中期,Prewitt提出了直方图双峰法,即如果灰度级直方图呈 明显的双峰状,则选取两峰之间的谷底所对应的灰度级作为阈值。
P 图像灰度直方图
暗 Z1
Zi
背景
Zt Zj
目标
Zk
亮
双峰法选取阈值的缺点:会受到噪音的干扰,最小值不是预期的阈值, 而偏离期望的值。 改进办法:1)取两个峰值之间某个固定位置,如中间位置上。由于峰 值代表的是区域内外的典型值,一般情况下,比选谷底更可靠,可排除 噪音的干扰;2)加强对噪音的处理。对直方图进行平滑处理。
一、图像分割概述
典型的图像分析和理解的系统: 系统分为图像输入、预处理、图像分割(image segmentation描述
中级处理
问题
图像获取
知识库
低级处理
识别 与 解释
结果
高级处理
1.图像分割的目标:
把图像分成互不重叠的区域并提取感兴趣的目标。如下图:
N i i 1
3.图像分割的基本思路:
• 从简到难,逐级分割;
分割矩形区域 定位牌照 定位文字
• 控制背景环境,降低分割难度;
背景环境::路面、天空
• 把焦点放在增强感兴趣对象,缩小不相干图像成分的干扰上。
感兴趣的对象:汽车牌照 不相干图像成分:非矩形区域
4.图像分割的基本策略:
分割算法基于灰度值的两个基本特性:
不连续性——区域之间 相似性——区域内部 根据图像像素灰度值的不连续性:
先找到点、线(宽度为1)、边(不定宽度),再确定区域。
根据图像像素灰度值的相似性:
通过选择阈值,找到灰度值相似的区域,区域的外轮廓就是对象的边。
5.图像分割的方法:
1) 基于边缘的分割方法:先提取区域边界,再确定边界限定的区域。 2) 区域分割:确定每个像素的归属区域,从而形成一个区域图。 3) 区域生长:将属性接近的连通像素聚集成区域。 4) 分裂-合并分割:综合利用前两种方法,既存在图像的划分,又有 像元的合并。 分割对象
g(x,y)=
1 f(x,y)≥t
或 0 f(x,y)<t
g(x,y)=
1 f(x,y)≤t 0 f(x,y)>t
另外,还可以将阈值设置为一个灰度范围[t1,t2],凡是灰度在范 围内的象素都变为1,否则皆变为0,即
g(x,y)=
1 t1≤f(x,y)≤t2 0 其它
某种特殊情况下,高于阈值t的象素保持原灰度级,其它象素都 变为0,称为半阈值法,分割后的图像可表示为:
分割对象
二、阈值分割
图像阈值分割是一种广泛应用的分割技术,利用图像中要提取的目标 物与其背景在灰度特性上的差异,把图像视为具有不同灰度级的两类区域 (目标和背景)的组合,选取一个合适的阈值,以确定图像中每个象素点应 该属于目标还是背景区域,从而产生相应的二值图像。 阈值分割法的特点是:适用于物体与背景有较强对比的情况,重要的 是背景或物体的灰度比较单一;而且总可以得到封闭且连通区域的边界。 1 图像二值化 设原始图像f(x,y),以一定的准则在f(x,y)中找出一个合适的灰度值, 作为阈值t,则分割后的图像g(x,y),可由下式表示: