盾构姿态自动测量系统的开发与应用
盾构机初始姿态测量方法及适用性分析
盾构机初始姿态测量方法及适用性分析李海亮(中铁二十二局集团轨道工程有限公司,北京100040)【摘要】本文结合某工程实际案例,基于对盾构机姿态的概述,通过分析水平尺法、侧壁法、分中法以及拟合圆法等姿态测量方法的原理及特点,总结各种测量方法的适用性。
【关键词】城市轨道交通;地铁隧道;盾构施工;初始姿态;测量方法【中图分类号】U455.43【文献标识码】A【文章编号】2095-2066(2020)03-0179-021盾构机姿态概述盾构机是在地下空间穿梭的运动体,因此盾构机姿态参数包括刀盘中心三维坐标、偏航角、俯仰角及滚动角等。
(1)偏航角是指掘进机轴线和设计隧道中心线之间的水平夹角,其表征的是盾构机在水平方向的方位,主要影响隧道在水平方向的转变方向[1]。
(2)俯仰角是指掘进机轴线和水平面的垂直夹角。
当X 轴的正半轴位于过坐标原点的水平面之上时,俯仰角为正,反之为负。
其表征盾构机在里程处上所处的坡度,主要影响隧道的掘进坡度。
(3)滚动角是指掘进机盾体相比于零位测量时发生的转动角度。
根据盾构机姿态参数定义可知,盾构机姿态准确性将直接影响成型隧道质量。
因此,盾构机姿态的准确性是盾构施工测量的一个十分关键的环节。
盾构机初始姿态参数主要是测量盾构机初始状态下的刀盘三维中心坐标、盾首、盾尾中心三维坐标、俯仰角、偏航角。
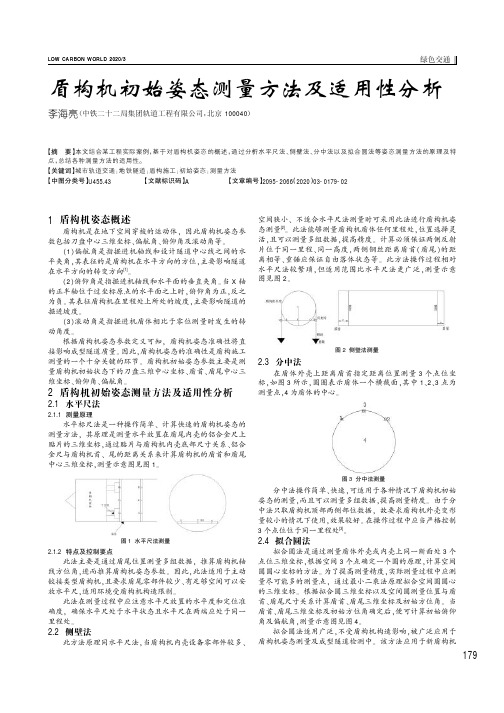
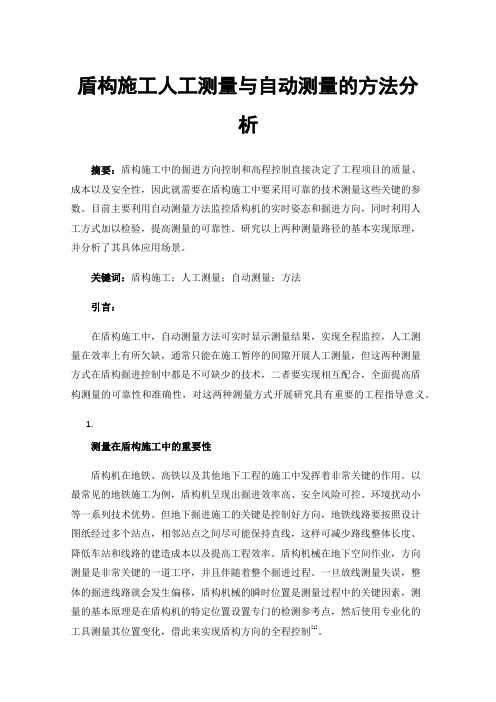
2盾构机初始姿态测量方法及适用性分析2.1水平尺法2.1.1测量原理水平标尺法是一种操作简单、计算快速的盾构机姿态的测量方法,其原理是测量水平放置在盾尾内壳的铝合金尺上贴片的三维坐标,通过贴片与盾构机内壳底部尺寸关系、铝合金尺与盾构机首、尾的距离关系来计算盾构机的盾首和盾尾中心三维坐标,测量示意图见图1。
2.1.2特点及控制要点此法主要是通过盾尾位置测量多组数据,推算盾构机轴线方位角,进而推算盾构机姿态参数。
因此,此法适用于主动铰接类型盾构机,且要求盾尾零部件较少、有足够空间可以安放水平尺,适用环境受盾构机构造限制。
高精度自动测量控制技术

施工方案部分1 盾构施工测量盾构施工测量是在地下施工导线上进行的,包括当前盾构姿态、管片姿态等内容,本标段采用VMT公司的SLT自动导向系统,并由传统的人工测量方法进行校合。
1.1自动导向系统的功能在盾构推进过程中,盾构司机需要有关机器轴线相对于隧道设计轴线的位置及方位的连续信息。
SLT自动导向系统能为操作者提供有关盾构空间位置及方位的连续更新的信息,从而保证盾构司机能够随时调整盾构推进方向及姿态,保证隧道施工的精度。
SLT 为全自动系统,每分钟可以完成数次全自动测量。
其由控制单元控制全站仪的测量工作,使全站仪自动扫描目标,从而既节省了人工,也提高了工作效率。
该系统具备以下优点:A.计算并以数字和图形两种方式显示当前盾构位置;B.计算并显示已拼装管片的位置,此步过程在管片拼装之后立即完成;C.计算并显示盾构在水平和竖直两个方向的趋势;D.输出盾构掘进的全面文档;E.自动间隔测量;F.自动控制激光束方向;G.舒适的系统操作界面。
1.2SLT 系统组成及各部分功能SLT 系统包含以下组件:Leica TCA1203(带隧道红激光)、激光感应装置、工业电脑、监控单元、供电电源盒、配套棱镜。
各部分连接、组成方式如图12-3 所示。
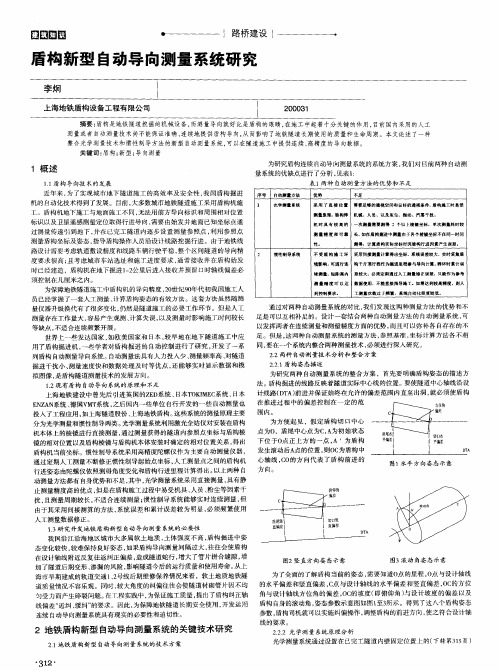
16-3 SLT 系统部分连接、组成方式施工过程中,全站仪(如图 12-4)安装在固定于隧道管片的观测站上, 由机载软件控制全站仪的观测程序;后视已知点,自动扫描激光感应目标;并 测定测站与目标间距离;同时全站仪发射激光;通过转换装置和传输装置将数 据传至工业电脑进行处理。
激光感应装置( ELS ,如图12- 5,固定安装在盾 构前端。
测量入射激光束的入射点、入射角及反射角,并根据激光的方位与入 射角可以计算盾构机的绝对方位;内置双重倾斜仪测量盾构的滚动角和坡度。
并将数据返回至工业电脑。
供电电源盒,负责为全站仪及激光仪提供电源供应。
TBM 控制单元,包括监控单元及工业电脑,位于 TBM 操作室里,负责数据ARTICULATION RWW ( :XTCT5ION MEASLtREMEft f MTCULATlOh RAM^XTEHSION MEASLtREMEft fIW«^N AJiM 5<TEhrSION MEASUftEMEh 「 ■ 2 [巧 | F ii ]| P拧刖谀胃 ft:应目标L 卩打川锻此器的“如;代 k漁ft :应目标L 世盘THfd;詁1歹》 阴I !川盘匕肚厲亍川虫 h ;俛16-4全站仪16- 5 ELS 标靶处理及显示。
电子论文-盾构姿态自动测量系统的开发与应用

收稿日期:2008-12-16 作者简介:潘国荣(1960),男,教授、博士生导师,工学博士. 主要研究方向为精密工程测量、工业测量盾构姿态自动测量系统的开发与应用潘国荣1)、2),王穗辉1),陈传林3),张德海3)1) 同济大学 测量与国土信息工程系,上海 2000922) 现代工程测量国家测绘局重点实验室,上海 2000923) 上海地铁盾构设备工程有限公司, 上海 200031摘要:综合国内外既有测量系统优点和通过用户需求的调研,开发了一套集盾构自动导向测量和工程动态管理可视化、操作简单、自动化程度高的测量系统。
该系统在某标段地铁区间施工现场进行了实地应用。
应用结果表明,在地铁隧道中采用该系统进行自动测量是方便、准确和可行的,可在无人值守情况下完成测量导向,完全能够取代人工测量。
同时提供可视化的地面建筑物与盾构推进相关关系的信息,便于盾构推进过程中对环境影响事故的预防。
关键词:自动导向测量,盾构,自动全站仪,可视化 中文分类号:U455.3 文献标识码: ADevelopment and application of automatic surveying system inShield tunnelin gPAN Guorong 1)、2), WANG Suihui 1),CHEN Chuanlin 3),ZHANG Dehai 3)1) Department of Surveying and Geo-Informatics,Tongji university, Shanghai 200092 2) Key Laboratory of Modern Engineering Surveying of SBSM, Shanghai 200092 3) Shanghai Metro Shield Equipment and Engineering Co. Ltd, Shanghai 200031Abstract: By synthesizi ng the advantages of various surveying systems at home andabroad, a visual automatic surveying system is developed in this paper. This surveying system has the important function of automatic shield tunneling guiding survey visualization and engineering dynamic management visualization, and it also has merits of simply operation and higher automation level. It has been applied to the construction of a section of railways, the result indicated that the surveying system is convenient, accurate and feasible, and can automatically accomplish the whole measurement task taking the place of manual measurement. Meanwhile, thissystem also provides the visual information of the correlations of the TPM site and the building around, which is propitious to prevent accidents caused by surroundings during the tunnel construction .Key words : automatic-guiding survey, Shield-Driven, automatic total station, visualization地下工程大多数投资大、施工复杂、对周围环境影响显著,对国民经济和大众生活具有重要影响,具有重要的社会、经济和战略意义。
“智慧盾构”重要一环!日本开发盾构洞内自动测量系统

㊀第2期武铁路:㊀基于深度学习的破碎带盾构施工沉降预测分析㊀463.ZHAO Yaoqiang,LI Yuanhai,ZHU Shiyou,et al.Study ofrules of influence of shield launching in different strata onground surface settlement[J].Tunnel Construction,2011,31(4):463.[10]㊀SAGASETA C.Analysis of undrained soil deformation dueto ground loss[J].Geotechnique,1987,37(3):301.[11]㊀LEE K M,ROWE R K.Deformations caused by surfaceloading and tunneling:The role of elastic anisotropy[J].Geotechnique,1989,39(1):125.[12]㊀韦凯,宫全美,周顺华.基于蚁群算法的地铁盾构隧道长期沉降预测[J].铁道学报,2008,30(4):79.WEI Kai,GONG Quanmei,ZHOU Shunhua.Forecast oflong-term settlement of metro tunnel based on ant colonyoptimization[J].Journal of the China Railway Society,2008,30(4):79.[13]㊀黄宏伟,张冬梅.盾构隧道施工引起的地表沉降及现场监控[J].岩石力学与工程学报,2001,20(增刊1):1814.HUANG Hongwei,ZHANG Dongmei.Shield tunnelinginduced surface settlement and in-situ monitoring[J].Chinese Journal of Rock Mechanics and Engineering,2001,20(S1):1814.[14]㊀朱才辉,李宁,柳厚祥,等.盾构施工工艺诱发地表沉降规律浅析[J].岩土力学,2011,32(1):158.ZHU Caihui,LI Ning,LIU Houxiang,et al.Analysis ofground settlement induced by workmanship of shield tunneling[J].Rock and Soil Mechanics,2011,32(1):158. [15]㊀谢自韬,江玉生,刘品.盾构隧道壁后注浆压力对地表沉降及围岩变形的数值模拟研究[J].隧道建设,2007,27(4):12.XIE Zitao,JIANG Yusheng,LIU Pin.Numericalsimulation study of surface settlement and surrounding rockdeformation caused by backfill grouting pressure in shieldtunneling[J].Tunnel Construction,2007,27(4):12.智慧盾构 重要一环!日本开发盾构洞内自动测量系统近日,日本大林组与从事测量业务的演算工房共同开发了一项用于盾构隧道洞内自动测量的系统 OGENTS/SURVEY ㊂该系统可通过移动终端远程操控自准直全站仪,实现自动化的测量作业㊂相比以往测量方式可减少30%的作业时间㊂开发背景盾构施工中,为了管理工程进度和施工精度需要每天进行洞内测量㊂目前对于盾构位置和姿态的测量(盾构测量)已实现了自动化,但对于管片的水平和竖直方向蛇形量的测量(管片测量)等依然采用手动方式㊂由于作业空间狭小,并且对测量仪器进行视准时测量员需弯腰操作,身体负担较重㊂此外,为了不影响盾构掘进进度,测量作业时间也受到限制㊂因此亟需一种自动化测量技术㊂系统概况OGENTS/SURVEY 系统是对盾构施工中必要的4个测量项目(洞内基准点测量㊁水准点测量㊁管片测量㊁盾构测量)全部通过移动终端远程操控自准直全站仪实施自动化测量,并且无需使用其他测量设备㊂该系统具有以下特征:1)通过移动终端远程操控进行自动测量㊂目前的盾构洞内测量工作普遍由负责视准作业的测量员及其辅助人员共计2人进行㊂采用该自动测量系统,管理人员在设置了测量所必须的标靶和全站仪后,可使用移动终端对全站仪进行远程操控,完成测量作业㊂因此无需测量员和辅助人员㊂2)适用于所有洞内测量,提升工作效率㊂该系统使用1台全站仪完成盾构测量㊁洞内基准点测量㊁水准点测量㊁管片测量的自动化㊂测量结果可发送至盾构掘进管理系统,省去了现场记录和输入至系统的工作,测量时间可缩短30%,并且防止了人为差错㊂3)自我诊断与校正,维持高测量精度㊂使用自准直全站仪时可能会受振动或冲击等影响造成精度下降,而迄今为止,盾构自动测量系统尚无检测精度下降的功能㊂该系统则是引入了可立即检测到精度下降的自诊断功能,并搭载了自动校正仪器的自校正功能,能够维持高测量精度㊂为了响应日本国土交通省的智能化建设i-Construction项目,大林组正在研发适用于各类盾构隧道施工现场的盾构自动化系统 大林智慧盾构 ㊂该系统包含了盾构施工中的 盾构自动测量 管片自动拼装 盾构设备自动化 自动壁后注浆 自动出渣 盾构无人驾驶 6个领域㊂计划在2020年前完成各要素技术的开发工作,在2021年前完成主系统㊂大林组计划在今后的盾构施工中利用新开发的自动测量系统提升施工进度,实现快速施工㊂(摘自隧道网https:///PNews/NewsDetail.aspx?newsId=32142㊀2019-02-15)302。
地铁盾构施工中盾构机姿态定位测量分析

地铁盾构施工中盾构机姿态定位测量分析摘要:随着城市化进程的不断加快,许多城市的发展都离不开地铁工程的建设,在具体的地铁工程建设施工中,为了更好的满足盾构施工的需求,就要加强对各种定位测量技术的利用,明显的将研究测量工作中存在的误差缩小,保证数据测量的准确性,科学的首先对地面的控制,保证各种定位测量的有效性。
本文主要分析地铁盾构施工中盾构机姿态定位测量的有效性,从而为后续的地铁施工提供有效保证。
关键词:地铁盾构施工;盾构姿态;定位测量在实际的地铁工程建设实施中,为了保证地铁工程建设的有效性,使城市交通通行更加便利,就要加强对盾构机姿态的定位测量,保证在进行地铁盾构施工的时候,盾构设计符合相关规定的要求,保证盾构掘进的贯通,将测量工作中存在的各种误差减小[1]。
盾构工程施工建设期间,不可避免的会受到各种不良因素的干扰,从而导致盾构施工的参数和支护设备发生改变。
所以在实际进行施工的时候,要注意周围土体的扰动,最好在进行盾构穿越之前可以进行试验段模拟,从而保证施工的参数得到优化。
一、盾构机自动导向系统功效和构成盾构机在使用的过程中,为了实现良好的定位测量效果,就要重视对自动导向系统的利用,因为自动导向系统是盾构机中的重要组成部分,其核心部分为SLS-T 系统,主要的功能实现依赖于发射激光束角度和距离测量等;而电子激光系统作为智能传感器中的一种,主要组成为激光靶板和靶板,该系统利用对于自动导向功能的实现具有积极的作用,因为该系统能够在利用中接收全站仪激光束,将不同角度的射点进行检测。
系统倾斜仪主要就是针对性的对旋转和倾斜角度进行测量,偏转角度主要的作用发挥依赖于电子激光系统和激光入射角。
电子激光系统固定在盾构机系统中,一旦将其安装完成以后,就可以科学的对系统的位置进行确定,保证轴向参数和设备之间的关系。
同时在自动制导系统中,一个核心利用的软件就是SLS-T 系统,该系统的利用能够科学精准的实现对各种数据信息的接收,实现对软件的额精准定位,将信息以图形和数据等形态进行展现。
盾构新型自动导向测量系统研究
为保 障地 铁 隧道施 工 中盾 构机 的 导 向精度 , 2 0 世纪9 O 年 代初 我 国施 工 人
员 已经掌 握 了一 套人 工测 量 、 计 算盾 构 姿态 的有 效方 法 。这 套 方法 虽 然 随测
量仪 器 升级换 代 有 了很 多变 化 , 仍然 是 隧道 施工 的 必要 和不 足
序号 冉动涮量方法 优势 不 足
近年 来 , 为 了实现 城 市 地 下隧 道 施工 的高 效率 及 安全 性 , 我 国 盾构 掘 进 机的 自动 化技 术 得到 了发 展 。 目前 , 大 多数城 市 地铁 隧 道施 工采 用 盾构 机 施 工 。盾构 机地 下 施工 与地 面施 工 不 同 , 无法 用前 方导 向标识 和 周 围相对 位 置 标识 以 及卫 星遥 感测 量 定位 取得 行进 导 向 , 需要 由始发 井 地面 已 知坐标 点通
1 . 2 现 有盾 构 自动 导 向 系统 的 原理 和 不足
2 . 2两种 自动测 量技 术分析 和 整合 方案
2 . 2 1盾 构姿 态描 述
为 研究 两 种 自动 测 量 系统 的 整 合方 案 ,首 先 要 明确 盾 构姿 态 的 描述 方 法 。盾构 掘 进的 线路 反 映着 隧道 实 际 中心线 的位 置 。 要 使 隧道 中心 轴线 沿设
须 控制 在 几厘 米 之内 。
性.
涮得.计 算腐绚安酥坐标 时曝后构 行进因素产生 误差。
惯性制导蕉 坑
受 腊 梅 施 工王 f = 采用间接 测量计算褥 出 坐 标. 囊 绕误基投 犬. 实对采羹 盾
境影 响, 可进 行涟 掏千 斤 顶 行程作为掘进 壁程参 与导向计算 . 辞环时 曼 诗 误 续蠢量, 醺雕 寓内 差较 大, 必须 定期通过人 工 铡 曩捧 正 撰差 ,只 齄作 为参考 灏 量精 度 可 以选 教据使 用.不能直接指导 艟工.妞搿选到 较离精度,则人 到掩制要求 . 工涮 量次数过 r频繁.系统 内动化程度段 低.
欧亚徕卡盾构自动引导测量技术
997.207 997.176 997.147 997.117 997.056 997.024 996.992 996.962 996.931 996.897 996.868
cm
cm
cm
cm
0.66 0.49 -0.56 2.40
0.66 0.50 -0.55 2.40 0.65 0.50 -0.55 2.39 0.64 0.50 -0.54 2.39 0.63 0.49 -0.54 2.40 0.61 0.48 -0.53 2.39 0.61 0.47 -0.53 2.39 0.61 0.47 -0.53 2.38 0.61 0.48 -0.53 2.38 0.61 0.48 -0.53 2.38 0.61 0.49 -0.52 2.38
-1 -1.5
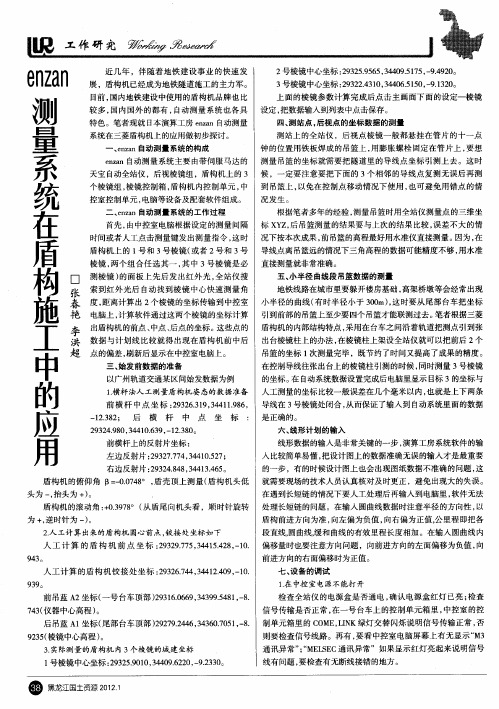
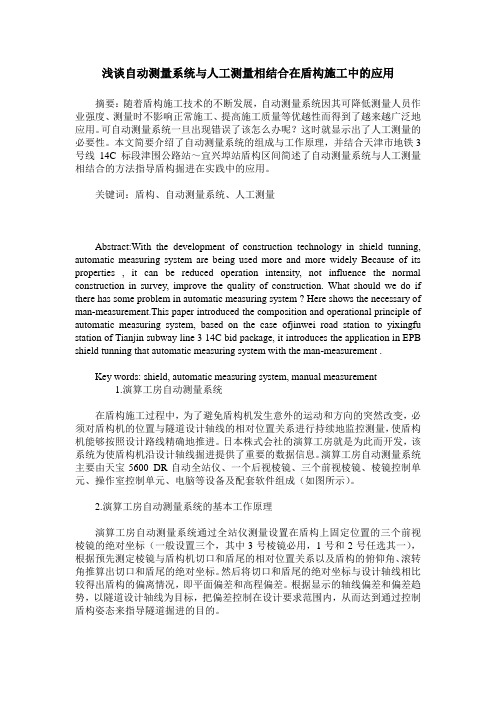
里程为:0+848.481 m 观测中误差:m ≤ ± 0.3 mm
7 13 19 25 31 37 43 49 55 61 67 73
观测序列 欧亚徕卡盾构自动引导测量技术
前平偏 前高偏 尾平偏 尾高偏
34
时刻
2003-9-23 11:09:52 11:13:14 11:17:09 11:21:29 11:26:21 11:31:44 11:37:35 11:43:54 11:50:16 11:56:38 12:03:00 12:09:22 12:15:46 12:22:08 12:28:32 12:34:55 12:41:19 12:47:41 12:54:00 13:00:26
2003。8。28
推进中盾构机姿态偏差监测结果
偏差(CM)
3.00
前进方向
2.50
2.00
1.50
观测中误差:m ≤ ± 0.4 mm
enzan测量系统在盾构施工中的应用
超 点的偏差, 刷新后显示在中控室电脑上。
以广州轨道交通某区间始发数据为例
1 . 法人 工测 量 盾 构机 姿 态 的数 据 准备 人工测量的坐标 比较一般误差在几个 毫米以内 , 横杆 也就是上下两条
号棱镜处闭合 , 从而保证 了输入到 自动系统里面的数据 前 横 杆 中点 坐 标 :9 2 -1 ,4 1.8 , 导线在 3 2 363 9 34 1 6 9
土 地利 用 动态 监测 是对 土地 利 用 的 籍 调查 , 我们经实 地踏勘 , 决定 布设 D级
勘 测界 址点 坐标 对邻 近 图根点 点位 中误 展 奠 定 坚 实 的 基 础 。使 用 最 新 的 G S P
二 、 束 语 结
差 及界 址线 与邻 近地 物或 邻 近界线 的距 Pu R和 Po R rX rX S系统 ,用户可 以在短时 率高 ,受条件 限制小 ,特别是 对铁路 、 公 及 GS应用 的强大工具。 I 路、 河流等线状用地效果更 为明显 。
9 3 4。
前进方 向的右面偏移 时为正值 。
七 、 备 的调 试 设
人 工计 算 的盾构 机铰 接处 坐标 :9 2 . ,4 1. 9 一 0 2 3 67 3 24 ,1 . 4 0
93 9。
1 中控室电源不能打开 . 在
前 吊蓝 A 坐标 ( 2 一号 台车顶部 )9 1.6 9 3 395 8 ,8 2 3 6 6 ,4 9 . 1一 . 0 4 7 3仪器 中心高程 ) 4( 。 93( 2 5 棱镜 中心高程 ) 。
面 , 记录其所规定 的属性信息 。手持式 井
2 测 方 案 . 观
地 籍测 量 的 目的是 测定 每宗 地 的权 差 分型 G S接收机 适用 于各种 情况 的土 P
盾构施工人工测量与自动测量的方法分析
盾构施工人工测量与自动测量的方法分析摘要:盾构施工中的掘进方向控制和高程控制直接决定了工程项目的质量、成本以及安全性,因此就需要在盾构施工中要采用可靠的技术测量这些关键的参数。
目前主要利用自动测量方法监控盾构机的实时姿态和掘进方向,同时利用人工方式加以检验,提高测量的可靠性。
研究以上两种测量路径的基本实现原理,并分析了其具体应用场景。
关键词:盾构施工;人工测量;自动测量;方法引言:在盾构施工中,自动测量方法可实时显示测量结果,实现全程监控,人工测量在效率上有所欠缺,通常只能在施工暂停的间隙开展人工测量,但这两种测量方式在盾构掘进控制中都是不可缺少的技术,二者要实现相互配合,全面提高盾构测量的可靠性和准确性,对这两种测量方式开展研究具有重要的工程指导意义。
1.测量在盾构施工中的重要性盾构机在地铁、高铁以及其他地下工程的施工中发挥着非常关键的作用。
以最常见的地铁施工为例,盾构机呈现出掘进效率高、安全风险可控、环境扰动小等一系列技术优势。
但地下掘进施工的关键是控制好方向,地铁线路要按照设计图纸经过多个站点,相邻站点之间尽可能保持直线,这样可减少路线整体长度、降低车站和线路的建造成本以及提高工程效率。
盾构机械在地下空间作业,方向测量是非常关键的一道工序,并且伴随着整个掘进过程。
一旦放线测量失误,整体的掘进线路就会发生偏移,盾构机械的瞬时位置是测量过程中的关键因素,测量的基本原理是在盾构机的特定位置设置专门的检测参考点,然后使用专业化的工具测量其位置变化,借此来实现盾构方向的全程控制[1]。
1.盾构施工测量方法分类(一)盾构施工人工测量方法第一,标尺测量。
这种测量工具可用于检测盾构机的管片是否存在偏差的问题。
在盾构机内部设置有专门的参考坐标,其位置位于盾尾内壳的铝合金尺上,利用水平标尺测量贴在其表面的三维坐标,获得数据之后,根据测量点与盾构机头部和尾部的距离关系,即可计算出其当前是否存在首尾方向上的偏差,这种方法在弯曲度较大的盾构作业中难以发挥作用,更加适用于直线段的测量,但整体精度偏低。
关于盾构机实时姿态测量和计算方法的研究

关于盾构机实时姿态测量和计算方法的研究盾构机是一种用于地下隧道开挖的工程机械设备。
在盾构机的使用过程中,实时姿态测量和计算方法的研究变得非常重要。
盾构机的姿态稳定性对于隧道的质量和施工效率有着直接的影响。
因此,本文将围绕盾构机实时姿态测量和计算方法的研究展开详细探讨。
首先,盾构机实时姿态测量的方法有很多种,包括传感器测量、图像处理等。
传感器测量是最常用的方法之一、通过在盾构机上安装加速度传感器、陀螺仪、姿态传感器等设备,可以实时测量盾构机的加速度、姿态角等参数。
这些传感器可以将测量数据传输到计算机中,通过算法分析得到盾构机的实时姿态。
其次,盾构机实时姿态计算方法的研究也非常关键。
通过采集的测量数据,需要进行精确的计算才能得到准确的姿态信息。
姿态计算方法可以分为数学模型计算方法和机器学习方法。
数学模型计算方法包括解析法、数值解法等,通过建立盾构机的数学模型,利用已知的输入参数计算出盾构机的姿态。
机器学习方法则是利用大量数据训练模型,通过学习得到的模型对盾构机的姿态进行预测和计算。
盾构机实时姿态测量和计算方法的研究对于盾构机的安全和施工效率具有重要意义。
如果盾构机姿态测量不准确,将会导致隧道施工质量下降,甚至可能发生事故。
因此,研究人员通过不断改进传感器的精度和计算算法的准确度,提高了盾构机姿态测量的准确性。
同时,采用机器学习方法也可以提高盾构机姿态计算的精度和效率。
此外,盾构机实时姿态测量和计算方法的研究还有一些挑战。
首先,盾构机的工作环境复杂多变,传感器容易受到振动、温度等外界因素的干扰,从而影响姿态测量的准确性。
其次,盾构机的姿态计算涉及多种参数,计算复杂度较高。
因此,研究人员需要设计更加鲁棒的传感器以及高效的计算算法,以应对复杂的工况和环境。
综上所述,盾构机实时姿态测量和计算方法的研究对于提高隧道施工的质量和效率具有重要意义。
通过不断改进传感器的精度和算法的准确性,研究人员可以提高盾构机姿态测量的准确性。
关于盾构机实时姿态测量和计算方法的研究
People who often blame themselves can often get forgiveness from others.勤学乐施天天向上(页眉可删)关于盾构机实时姿态测量和计算方法的研究随着社会经济的发展和城市建设的加快,城市规模不断扩大,人口不断增多,交通越来越来拥挤。
一些地方的城市建设者为了治理交通拥堵,分散交通压力。
不断寻求解决方式,修建地铁成为了一些城市建设者的主要的选择方式。
但是在修建地铁的过程中,工程量非常大,施工难度相对较高。
在地铁施工过程中,采用盾构技术,与传统的施工技术相比,有着许多优势,逐渐成为地铁修建过程中的主要施工方法。
本文将主要分析盾构姿态的测量的原理和方法,探究盾构姿态的测量的精度分析。
盾构机姿态简介盾构施工过程就像生活中的目标运动,先进行重心平移,然后在运动的过程中偏航,最后进行自身重心的滚动。
因此,在盾构施工过程中,需要监测的数据是盾构机位置和姿态的参数。
主要是三维坐标和滚动角、偏航角和俯仰角。
盾构机姿态的控制对整个工程施工意义重大,它决定着施工的质量和隧道推进方向的精度。
一旦控制不好,容易导致隧道偏差过大和盾尾间隙过小而相碰。
盾构机液压系统液压系统是盾构机的核心部分,盾构机的工作机构主要是由液压系统驱动完成,对盾构机系统的运行起着很大的作用。
盾构机的液压系统主要包括两大系统,一是推进系统,二是主动铰接系统。
2.1.推进系统盾构机的主要工作系统是推进系统,它主要是通过油缸作用于成型观片,以此来实现盾构前进。
推进系统的动力单元是一台80L/min旋转柱塞泵,执行元件是24个油缸,调节和控制部分包括方向的控制、油缸电磁阀的选择、安全阀、节流阀等。
盾构机工作时的最大工作压力是35MPa,液压泵最大推进流量是80L/min,推进油缸是240/180-1950(mm)。
2.1.1.推力计算盾构机共有推进油缸24个,总推力是这24个油缸的推力之和,那么在液压系统的最大推力F最大-24×P×Sn中,P表示油缸的最大压强,S表示活塞面积,因此,F最大-24×35×106Pa ×3.14×0.122㎡≈37981t2.1.2.推进速度计算盾构机的最大推进速度就是油缸的最大伸长速度,S-1/T,T-V/S1,在这个公式中,S表示最大推进速度,T表示伸长1mm所需要的时间,V表示伸长1mm需要的油液体积,S1为推进流量,S为74mm/min。
盾构机姿态参数测量技术研究

盾构机姿态参数测量技术研究摘要:根据三点决定一个平面的原理,通过在盾构机中体上布置测量控制点,对其三维坐标进行测量:根据空间解析几何原理,推导出盾构机刀盘中心三维坐标以及俯仰角、横摆角、扭转角的计算方法。
文章利用计算机的伪随机函数对盾构机姿态参数的测量精度进行了模拟评价,探讨了提高测量精度的方法。
结果表明,盾构姿态参数的测量误差均服从正态分析:采用精度为3 mm的激光经纬仪测量控制点坐标,得到的盾构姿态参数的误差范围比规范要求小得多。
关键词:盾构姿态;测量;误差分析The research of the measurement technology aboutthe shield posture parametersAbstract:According to the basic principle that three points decide a plane, we can lay control points to measure their three-dimensional coordinates on a shield. Based on the principles of analytical geometry, the method was derived to compute the coordinates of the center in the cutting disc, pitch angle, lateral swing angle and torsion angle. The paper carried out a simulated evaluation to measure the precision of the shield posture parameters by using the pseudorandom function with the computer, and discussed the ap-proaches to promote the precision. The result was shown that the measurement errors of the shield posture parameters followed the normal distribution. The error band of the shield posture parameters, which was obtained by measuring the coordinate of controlling points with a 3 mm precision laser transit, was far less than that recommended by the specifications.Keywords : shield; posture ; measurement; error analysis盾构法隧道施工具有速度快、安全性高、质量好、对周围环境影响小等优点,已越来越多地在城市地铁隧道施工中得到应用。
浅谈自动测量系统与人工测量相结合在盾构施工中的应用
浅谈自动测量系统与人工测量相结合在盾构施工中的应用摘要:随着盾构施工技术的不断发展,自动测量系统因其可降低测量人员作业强度、测量时不影响正常施工、提高施工质量等优越性而得到了越来越广泛地应用。
可自动测量系统一旦出现错误了该怎么办呢?这时就显示出了人工测量的必要性。
本文简要介绍了自动测量系统的组成与工作原理,并结合天津市地铁3号线14C标段津围公路站~宜兴埠站盾构区间简述了自动测量系统与人工测量相结合的方法指导盾构掘进在实践中的应用。
关键词:盾构、自动测量系统、人工测量Abstract:With the development of construction technology in shield tunning, automatic measuring system are being used more and more widely Because of its properties , it can be reduced operation intensity, not influence the normal construction in survey, improve the quality of construction. What should we do if there has some problem in automatic measuring system ? Here shows the necessary of man-measurement.This paper introduced the composition and operational principle of automatic measuring system, based on the case ofjinwei road station to yixingfu station of Tianjin subway line 3 14C bid package, it introduces the application in EPB shield tunning that automatic measuring system with the man-measurement .Key words: shield, automatic measuring system, manual measurement1.演算工房自动测量系统在盾构施工过程中,为了避免盾构机发生意外的运动和方向的突然改变,必须对盾构机的位置与隧道设计轴线的相对位置关系进行持续地监控测量,使盾构机能够按照设计路线精确地推进。
有关盾构机姿态人工测量及计算方法的论证

有关盾构机姿态人工测量及计算方法的论证引言:盾构机是一种用于隧道建设的工程设备,通过推进机身以及修建隧道衬砌的方式,能够在地下进行隧道的建造。
在盾构机的施工过程中,准确测量盾构机的姿态是非常重要的,因为它直接影响到隧道施工的质量与安全。
本文将论证有关盾构机姿态的人工测量及计算方法的可行性与可靠性。
一、盾构机姿态测量的重要性盾构机姿态测量的准确性对于隧道建设来说至关重要。
一方面,它直接影响到隧道的水平度和垂直度,这对于确保隧道的通畅和安全非常重要。
另一方面,姿态测量可以提供盾构机相关数据,对于控制推进方向和修建隧道衬砌都有重要意义。
因此,准确的姿态测量可以大大提高盾构机的施工效率和质量。
二、盾构机姿态的人工测量方法1.气泡水平仪测量法气泡水平仪是一种常见的测量工具,可以通过测量水平仪上的气泡位置来判断物体的水平度。
在盾构机的姿态测量中,可以将气泡水平仪固定在盾构机上,并通过观察气泡的位置来判断机身的水平度。
2.视觉测量法视觉测量是一种常见的测量方法,在盾构机姿态测量中也可以应用。
通过设置相机系统,拍摄盾构机姿态的照片,然后通过计算机软件对照片进行分析和处理,从而得到盾构机的姿态信息。
三、盾构机姿态的人工计算方法1.几何测量法几何测量法是通过测量多个参考点的位置和距离来计算盾构机的姿态。
可以根据盾构机特定的结构和设计,找到一些参考点,测量它们的位置和距离,并进行数学计算,从而得到盾构机的姿态。
2.运动学计算法运动学计算法是通过运动学原理和运动学方程来计算盾构机的姿态。
可以根据盾构机运动的轨迹和速度等信息,利用运动学定律进行计算,从而得到盾构机的姿态。
人工测量及计算方法对于盾构机姿态的准确性和可靠性具有一定的保障。
首先,人工测量可以选择合适的测量工具和方法,以提高测量的精度和准确性。
其次,计算方法可以根据盾构机的特点和施工条件进行合理的调整和优化,从而得到准确的姿态数据。
此外,人工测量及计算方法相对简单可行,不需要过于复杂的设备和系统,便于现场操作和实施。
盾构施工人工测量与自动测量技术探讨
盾构施工人工测量与自动测量技术探讨摘要:随着城市建设的飞速发展,我国在各大城市都开展了地铁建设,为了满足盾构掘进按设计要求贯通(贯通误差必须小于±50mm),必须研究每一步测量工作所带来的误差,包括地面控制测量,竖井联系测量,地下导线测量,盾构机姿态定位测量4个阶段。
关键词:盾构施工;人工测量;自动测量技术盾构法具有施工速度快、机械化程度高、人员配备少、不影响地面交通等优点,所以在地铁区间施工中得到广泛应用。
盾构施工测量是盾构施工中最重要的环节之一。
1工程概况上海市轨道交通12号线顾戴路站~东兰路站区间:区间出顾戴路站端头井后下穿顾戴路北侧规划公园,自顾戴路折向万源路,然后沿万源路下向北进行,下穿万源路地块后,线路左、右线分离,分别从东西侧绕僻万源路桥桩基,下穿漕河泾港。
过东兰路后进入东兰路站。
本段区间较长,里程范围为SK+411.527~SK5+080.520,长度为1668.993。
上行线有5段曲线,曲线半径依次为370m、1200m、650m、1000m、1000m。
线路纵断面最小坡度2‰,最大坡度25‰。
隧道覆土最小为10.0m,最大为22.2m。
本区间为双线单圆盾构区间,在最低点设置旁通道(兼排水泵站)1座。
2盾构掘进测量2.1人工测量(1)盾构测量标志的安装及测定测量标志由前靶、后靶、横向坡度、纵向坡度组成,具体实物为前后测量徕卡反射贴片和坡度板(纵向和横向坡度都可测),进行安装时,先测量出盾构的轴线,并把贴片和坡度板固定在盾构中心线上,前标后标应具有足够的长度,前靶距切口越近越好。
测量出前靶、后靶到盾构中心线的距离以及前靶到切口的距离、后靶到盾尾距离,以确定前后靶与切口盾尾坐标归算的几何关系。
为确保整个施工期间不被破坏,设置保护记号,此项工作应有原始记录和校核记录,以免盾构标志数据中存在系统误差。
初次测量时,用仪器照准前、后占牌各测量一个测回,再根据坡度板的数值确定盾构的初始姿态,方便盾构始发及时纠正。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
明, 在地铁隧道 中采 用该 系统进 行 自动测 量 是方 便 、 准确 和
求 , 导 系统 的 自动 化 水 平 直 接 制 约 了施 工 的精 度 引
可行 的, 可在无人值 守 的情 况 下完成 测量 导 向 , 完全 能够 取 代人 工测量 . 同时可提供可视化 的地面建筑 物与 盾构推进 相 关关 系的信息 , 便于在盾构推进过 程 中预 防发生影 响环境 的
待盾构 推进 中测 量 了 N( N≥3 个 特 征点 后 , ) 根
据所 得 到的特 征 点 的测 量 坐 标 以及 初 始 标 定 坐 标 , 通过 坐标 转 换 的 方 法 求 出上 述 两 套 坐 标 的 转 换 参 数, 然后再 把盾 构机切 口中心 、 盾尾 中心 的初 始标 定 坐标 代人 到转换 模 型 中即 得 到切 口中心 点 0、 尾 盾 中心 点 C的在测量 坐标 系 中的坐标 . 有 了切 口 0 的坐 标 , 过 与 设 计 数 据 的 比较 , 经 就可 以判断 出 当前 切 口的里程 L一 知道 了切 口在 .
P N u rn ~, W G u h i , C A G oog N A S iu ' 如
De a 0 h i
(. e at n f uv yn n e - fr t s o  ̄i nv ri , 1 D prme t re igadG oI omai ,T n iest oS n c u y
和切 口中心的盾构推进轴线 . 通过这条轴线与隧道
第3 8卷
上方 的 A 点 . 当然 , 中有一个 点要 位于 0 其 C轴线上 基 准 .
方 , 近盾 构顶 部 , 接 以便 与 O C轴组 成 平 面 Ⅱ。并 且 ,
()盾 构 特 征 点 检 核 . 系 统 由一 台全 站 仪 以 2 本
计算 其 与竖直 面 Ⅱv的初 始 夹 角 Rm, 后 根据 Ⅱo 连续支导线形式沿盾构前进方 向向前传递坐标 , 然 每
较地 面 困难 , 而且 对 于贯 通 和 引 导 有很 高 的技 术 要 和进 度 . 为此 , 作者 开发 了一 套 集 盾构 自动 导 向测 量 和工 程 动 态 管 理 可 视 化 为一 体 的测 量 系 统 , 于 我 对
国包 括地 铁 、 道 在 内 的地 下 工 程 施 工 Ⅲ 具 有 明 隧 1
c n t u to .R s l h ws h t t e u v y n s se o sr c i n eut s o t a h s r e i g y t m i s c n e in , c u a e a d f a i l o a t ma i l c o l h o v n e t a c r t n e sbe t u o t a l a c mp i c y s
(. 1 同济大学 测量与国土信息工 程系, 上海 2 0 9 ; . 0 0 2 2 现代工程测量 国家测绘局重点实验室 , 上海 2 0 9 ; 0 0 2 3 上海地铁盾 构设 备工程有 限公 司, . 上海 2 0 3 ) 0 0 1
摘要 : 通过用户 需求 调研 并综 合 国 内外 既 有测 量 系统 的优
通 过加 大或 减小 相应 组千 斤顶 油 压 的方 法 改 变 盾构
Ab t a t By s n h szn t e a v n a e o v ro s sr c : y t e ii g h d a t g s f a iu
s r e i g s s e a h me n a r a ,a i l — p r t d u v y n y t ms t o a d b o d smp y o e a e
收 稿 E期 : 0 8—1 l 20 2—1 6
作者简介 : 国荣 (9 0 )男 , 潘 1 6 一 , 教授 , 博士生导师 , 工学博士 , 主要研究方向为精密工程测量 、 测量与测量 自动化 工业
E malp r @ 1 3 C r - i: g 2 6 .O n
同 济 大 学 学 报 ( 然 科 学 版) 自
Ke wo d : a t ma i— u d n s r e y r s uo t g iig c u v y; a I ma i o a t t n:v s a i t n E o t t t1 a i t c s o iu l a i z o s il — rv n; hedd ie
随着 国家 城 市 建 设 的 快 速 发展 , 下工 程 项 目 地
点, 开发 了一套操作简单 、 自动化程度 高 、 盾构 自动导 向测 越来 越多 . 集 由于地 下施 工 的特 殊性 , 施 工 条 件往 往 其 量和工程 动态 管理 可视 化 为一 体 的测 量 系 统 . 用结 果 表 应
第 3 第 3期 8卷 21 0 0年 3月
同 济 大 学 学 报 ( 然 科 学 版) 自
J U N L O O G I N V R I Y N T R LS I N E O R A F T N J IE ST ( A U A C E C ) U
Vo . 8 No 3 13 . Ma .2 0 r 01
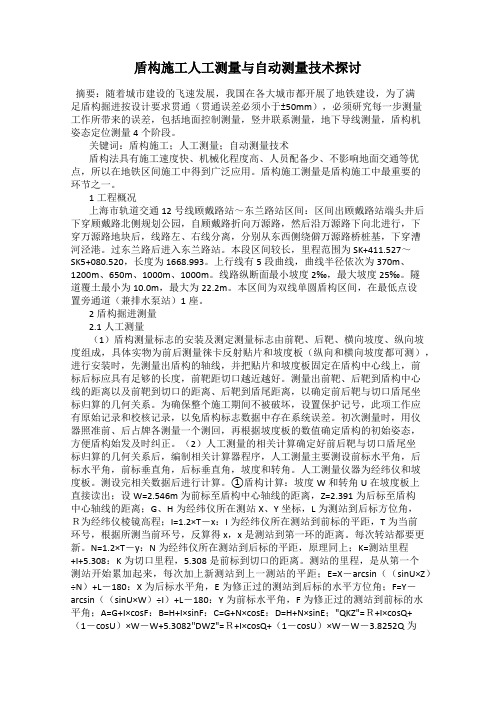
为 方便 起见 , 定 盾构 切 口中心点 为 O, 尾 中 假 盾 心 点为 C, 为位 于 O 点 上方 的一 点 , 图 1所 示 , A 如 则 O C为盾 构 中心轴 , O 的方 向代表 了盾构 前 进 的 C 方 向 . 全 面 了解 盾 构 当前 的 姿 态 , 要 知道 0 点 为 需 的里程 、 0点 与设 计 轴线 的水 平 偏差 和竖 直 偏 差 、 C 点 与设计 轴 线 的水 平 偏差 和竖 直偏 差 、 C 的方 位 角 0 与设 计轴 线 方位 角 的偏差 、 C的坡 度 ( O 即俯 仰角 ) 与 设计 坡 度 的偏 差 以及 盾构 自身 的旋 转角 . 到 了这 8 得 个 盾构 姿态 参数 , 盾构 司机就 可 以 调整 千 斤 顶 编组 ,
v s a ia i n iu l t z o ad n e gn eig n i e rn d n mi ya c ma a e n n g me t
v s a ia i n Th s se iu l t . z o e y t m wa a p i d t t e r i y s p l o h al e wa
文 章 编 号 : 2 33 4 (0 0 0 —4 90 0 5 —7 X 2 1 )30 5—5
D :0 36 /. s .2 33 4 .0 0 0 .2 OI1 .9 9 ji n 0 5 —7 x 2 1 .3 0 7 s
盾 构 姿 态 自动 测 量 系统 的 开发 与应 用
潘 国 荣 , 穗 辉 陈传 林。 张德 海。 王 , ,
h g l u o t iu l u v y n y t m sd v lp dwi i h y a t ma i vs a r e i g s s e wa e e o e t a c s h c a a t rs i o a t ma i h ed u n l g u d n u v y h r ce itc f u o t s i l t n e i g i i g s r e c n
与 Ⅱv 的夹角的变化来计算盾构的旋转角参数.
次测量都从上述 隧道前端基准点开始, 测量盾构特 征 点坐 标 . 因此 每 次 测量 得 到 的 特征 点 坐 标 均相 互
独立 , 并且 每次 结果之 间可 以相 互 起 到检 核作 用 . 每
次测量完毕进行下一步计算之前 , 都要检验测量过 程 中的每个点 和每条 边是 否有 明显错误 . () 3 获取姿态参数. 本系统先通过 自动全站仪 对特征点进行学 习测量 , 在记忆了特征点的方位信
盾 构掘 进 的 线 路 反 映 着 隧 道 实 际 中 心 线 的位
C u n i a ha l 。 n
置 . 使 隧 道 中心 轴 线 沿设 计 线 路 前 进 并 保 证最 终 要 盾 构 能 够 在允 许 的偏 差 范 围 内贯 通 , 必 须 要 在 盾 就
构推进过程中实 时地确定盾构姿态参数 , 使偏差控 制Байду номын сангаас在一 定 的范 围 内.
的前 进方 向 , 从而 达 到纠偏 的要 求 .
12 姿 态参 数确 定[ . 4 在标 定 过 程 中 , 了标 定 位 于 盾 构 轴 线上 的 0 除
点 和 C点 外 , 另外 只需 要标 定位 于 盾构 上 的 N( N≥ 3个 特征 点 , ) 而不 再 需 要 特 别 标 定 位 于盾 构 刀盘 正
S a g a 0 0 2, C na 2.Ke a o ao y o o e n En ie rn h n h i2 0 9 hi ; y L b r tr fM d r gn e ig S r e igo BS , h n h i 0 0 2,Chn 3. a g a er il u v yn fS M S a g a 0 9 2 ia; Sh n h i M toShed E uime ta dEn n e ig C Lt . h n h i 0 0 1,Chia q p n n gie rn o. d ,S a g a 0 3 2 n)
图 1 盾构姿态描述 示意 图
Fi 1 T n ls i l t iu e g. un e h ed a tt d
息 后 即可 实 现对 特 征 点 的 自动 测 量 . 测 得特 征 点 在 的坐标 后 , 求 出特征 点 的测 量坐 标 与 预先 标 定 的 先 坐标 之 间的转 换 关 系 , 后再 根 据 切 口中心 和 盾尾 然 中心 的标定 坐标 利用该 转换 关 系求 出切 口中 心和盾 尾 中心 的测 量 坐标 . 样 就 得 出一 条 经 过盾 尾 中心 这
t e wh l a u e n s . a e n t1 v s a n o ma i n h o e me s r me t t k B s d o } iu 1i f r t a e o o e c r e a i n f r d b h y t m b u h M i ft o r lto s o f e y t e s s e a o tt e TP st h e e a d t e u li g r u d c i e t c u e b s r o n i g n b i n a o n ,a cd n s a s d y u r u dn s h d d rn h u n lc n t u t n c n b v i e . u i g t e t n e o s r c i a e a od d o