模式识别报告模版-本科
哈尔滨工程大学-模式识别实验报告模板

实验报告实验课程名称:模式识别姓名:班级: 20120811 学号:注:1、每个实验中各项成绩按照5分制评定,实验成绩为各项总和2、平均成绩取各项实验平均成绩3、折合成绩按照教学大纲要求的百分比进行折合2015年 4月实验1 图像的贝叶斯分类1.1 实验目的将模式识别方法与图像处理技术相结合,掌握利用最小错分概率贝叶斯分类器进行图像分类的基本方法,通过实验加深对基本概念的理解。
1.2 实验仪器设备及软件HP D538、MATLAB1.3 实验原理1.3.1基本原理阈值化分割算法是计算机视觉中的常用算法,对灰度图象的阈值分割就是先确定一个处于图像灰度取值范围内的灰度阈值,然后将图像中每个像素的灰度值与这个阈值相比较。
并根据比较的结果将对应的像素划分为两类,灰度值大于阈值的像素划分为一类,小于阈值的划分为另一类,等于阈值的可任意划分到两类中的任何一类。
此过程中,确定阈值是分割的关键。
对一般的图像进行分割处理通常对图像的灰度分布有一定的假设,或者说是基于一定的图像模型。
最常用的模型可描述如下:假设图像由具有单峰灰度分布的目标和背景组成,处于目标和背景内部相邻像素间的灰度值是高度相关的,但处于目标和背景交界处两边的像素灰度值有较大差别,此时,图像的灰度直方图基本上可看作是由分别对应于目标和背景的两个单峰直方图混合构成。
而且这两个分布应大小接近,且均值足够远,方差足够小,这种情况下直方图呈现较明显的双峰。
类似地,如果图像中包含多个单峰灰度目标,则直方图可能呈现较明显的多峰。
上述图像模型只是理想情况,有时图像中目标和背景的灰度值有部分交错。
这时如用全局阈值进行分割必然会产生一定的误差。
分割误差包括将目标分为背景和将背景分为目标两大类。
实际应用中应尽量减小错误分割的概率,常用的一种方法为选取最优阈值。
这里所谓的最优阈值,就是指能使误分割概率最小的分割阈值。
图像的直方图可以看成是对灰度值概率分布密度函数的一种近似。
模式识别实验报告参考模板

院系:计算机科学学院专业:智能科学与技术年级: 2012 级课程名称:模式识别组号: 13组组员:徐灿马卿指导教师:孙阳光老师2014年12月30日样本分析的图像(此处把数据改成两类,男生的单独为一个文件,女生的单独为一个文件)实验结果分析P0.5-P0.5时328个样本的错误率分析P0.5-P0.5时124个样本的错误率分析P0.75-P0.25时328个样本的错误率分析P0.75-P0.25时124个样本的错误率分析P0.9-P0.1时328个样本的错误率分析P0.9-P0.1时124个样本的错误率分析表格1身高和体重单独下各样本下各种概率的错误率分析样本概率为P0.5--P0.5误差概率概率P 0.75—P0.25误差概率概率P 0.9—P0.1误差概率328个样本身高错误个数:33错误率为:10.06%错误个数:60错误率为:18.29%错误个数:81错误率为:24.70% 体重错误个数:45错误率为:13.72%错误个数:68错误率为:20.73%错误个数:89错误率为:27.13%124个样本身高错误个数:16错误率为:12.90%错误个数:31错误率为:25.00%错误个数:34错误率为:27.42% 体重错误个数:21错误率为:16.94%错误个数:35错误率为:28.23%错误个数:37错误率为:29.84%根据表格内容,选择P0.5——P0.5时的概率对样本3进行分析,得到的结果以身高乘以体重的算法来计算错误率分类时的结果P0.5-P0.5时328个样本的错误率分析P0.5-P0.5时124个样本的错误率分析P0.75-P0.25时124个样本的错误率分析P0.9-P0.1时124个样本的错误率分析表格2身高和体重乘积下各样本下各种概率的错误率分析样本概率为P0.5—P0.5时的身高体重错误率概率为P0.75—P0.25时的身高体重错误率概率为P0.9—P0.1时的身高体重错误率样本为328时分类错误个数:30分类错误率为:9.15% 分类错误个数:37分类错误率为:11.28%分类错误个数:49分类错误率为:14.94%样本为124时分类错误个数:17分类错误率为:13.71% 分类错误个数:19分类错误率为:15.32%分类错误个数:23分类错误率为:18.55%根据表格内容,选择P0.5——P0.5时的概率对样本3进行分析,得到的结果根据样本得到的fisher分界线实验结果分析样本为328时的错误率分析:样本为90时的错误率分析身高和体重相关时的bayes(贝叶斯)判别性别时的分类线身高条件先验概率分布曲线身高条件后验概率分布曲线最小风险时bayes分类器概率分布曲线根据样本得到的fisher分界线最小风险时bayes分类器概率分布曲线结果分析;由两个图可以看出,由fisher分类法得到的错误率比bayes的错误率低很多,但是当样本的数据分布不均时,使用fisher分类法得到的错误率会比bayes分类法得到的错误率高。
武汉理工大学,模式识别实验报告,带数据!带代码!
武汉理工大学模式识别实验报告姓名:班级:学号:姓名:班级:学号:实验一总体概率密度分布的非参数方法一、实验目的1.了解使用非参数方法估计样本概率密度函数的原理。
2.了解Parzen窗法的原理及其参数h1,N对估计结果的影响。
3.掌握Parzen窗法的算法并用Matlab实现。
4.使用Matlab分析Parzen窗法的参数h1,N对估计结果的影响。
二、实验数据一维正态分布样本,使用函数randn生成。
三、实验结果选取的h1=0.25,1,4,N=1,16,256,4096,65536,得到15个估计结果,如下图所示。
由下面三组仿真结果可知,估计结果依赖于N和h1。
当N=1时,是一个以样本为中心的小丘。
当N=16和h1=0.25时,仍可以看到单个样本所起的作用;但当h1=1及h1=4时就受到平滑,单个样本的作用模糊了。
随着N的增加,估计量越来越好。
这说明,要想得到较精确的估计,就需要大量的样本。
但是当N取的很大,h1相对较小时,在某些区间内hN趋于零,导致估计的结果噪声大。
分析实验数据发现在h1=4,N=256时,估计结果最接近真实分布。
附录:1.Parzen窗法函数文件parzen.m function parzen=parzen(N,h1,x) %ParzenhN = h1/sqrt(N);num_x = numel(x);parzen = zeros(1, num_x);for u = 1:num_xfor i=1:Nparzen(u) = parzen(u)+exp(((x(u)-x(i))/hN).^2/-2);endparzen(u)=parzen(u)/sqrt(2*pi)/h1/sqrt(N);end2.例程文件parzen_sample.mx = randn(1,10000);%Normally distributed pseudorandom numberspx = normpdf(x,0,1);%Normal probability density function - normpdf(X,mu,sigma)h1 = [0.25, 1, 4];N = [1, 16, 256, 1024, 4096];num_h1 = numel(h1);%Number of array elementsnum_N = numel(N);figure('Name', '总体概率密度分布的非参数方法');%遍历h1for i_h1 = 1:length(h1)h1_offset = (i_h1-1)*(num_N+1)+1;%绘图位置的偏移量subplot(num_h1, num_N+1, h1_offset);plot(x, px, '.');ylabel(sprintf('%s%4.2f', 'h1=', h1(i_h1)));title('正态分布样本的概率密度函数')%遍历Nfor i_N = 1 : length(N)pNx=parzen(N(i_N), h1(i_h1), x);subplot(num_h1, num_N+1, h1_offset+i_N);plot(x, pNx, '.');title(sprintf('%s%d', 'N=', N(i_N)));endend姓名:班级:学号:实验二感知器准则算法实验一、实验目的1.了解利用线性判别函数进行分类的原理。
实验一模式识别范文

实验一模式识别范文
模式识别是计算机科学领域一个研究内容,它的目的是识别永久存在
的模式,以实现有效的数据处理和决策。
它主要集中在分类机制和分类算
法上,并且对特征结构及分类的准确性进行测试以应用到实际需求中。
模式识别是处理大量信息的基础,是一些新的有用信息与其他类别信
息区分的过程。
它可以建模出特殊情况,并有效的对这些类别判断准确性。
模式识别也可以改善监督学习、无监督学习、半监督学习的模式学习和其
他机器学习中的性能。
模式识别有各种应用,比如计算机视觉、声音识别、语言识别、手写
识别、面部识别、自然语言处理等,它们都是基于模式识别技术实现的。
模式识别技术可以大大提升机器人的视觉系统,以实现更准确和更快速的
行为。
在安全管理、公共交通、智能制造和生物医学等领域中,模式识别
技术也有广泛的应用。
模式识别也有其缺点,比如分类算法的运算速度容易延迟,特征选取
也有可能不太准确。
因此要正确使用模式识别,需要为特征选取和算法进
行合理的优化,以保证正确的识别结果。
总之,模式识别是一项广泛应用的技术,它可以提高机器学习的精确度,在计算机视觉等各个领域中有着广泛的应用。
《模式识别》实验报告-贝叶斯分类
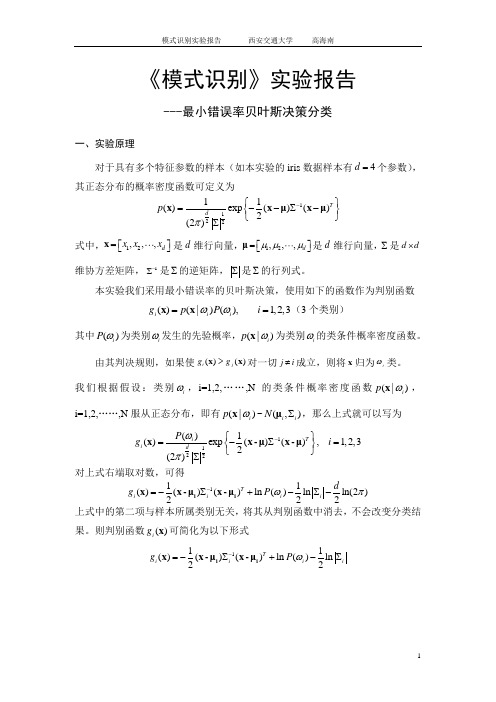
《模式识别》实验报告---最小错误率贝叶斯决策分类一、实验原理对于具有多个特征参数的样本(如本实验的iris 数据样本有4d =个参数),其正态分布的概率密度函数可定义为112211()exp ()()2(2)T d p π-⎧⎫=--∑-⎨⎬⎩⎭∑x x μx μ 式中,12,,,d x x x ⎡⎤⎣⎦=x 是d 维行向量,12,,,d μμμ⎡⎤⎣⎦=μ是d 维行向量,∑是d d ⨯维协方差矩阵,1-∑是∑的逆矩阵,∑是∑的行列式。
本实验我们采用最小错误率的贝叶斯决策,使用如下的函数作为判别函数()(|)(),1,2,3i i i g p P i ωω==x x (3个类别)其中()i P ω为类别i ω发生的先验概率,(|)i p ωx 为类别i ω的类条件概率密度函数。
由其判决规则,如果使()()i j g g >x x 对一切j i ≠成立,则将x 归为i ω类。
我们根据假设:类别i ω,i=1,2,……,N 的类条件概率密度函数(|)i p ωx ,i=1,2,……,N 服从正态分布,即有(|)i p ωx ~(,)i i N ∑μ,那么上式就可以写为1122()1()exp ()(),1,2,32(2)T i i dP g i ωπ-⎧⎫=-∑=⎨⎬⎩⎭∑x x -μx -μ对上式右端取对数,可得111()()()ln ()ln ln(2)222T i i i i dg P ωπ-=-∑+-∑-i i x x -μx -μ上式中的第二项与样本所属类别无关,将其从判别函数中消去,不会改变分类结果。
则判别函数()i g x 可简化为以下形式111()()()ln ()ln 22T i i i i g P ω-=-∑+-∑i i x x -μx -μ二、实验步骤(1)从Iris.txt 文件中读取估计参数用的样本,每一类样本抽出前40个,分别求其均值,公式如下11,2,3ii iii N ωωω∈==∑x μxclear% 原始数据导入iris = load('C:\MATLAB7\work\模式识别\iris.txt'); N=40;%每组取N=40个样本%求第一类样本均值 for i = 1:N for j = 1:4w1(i,j) = iris(i,j+1); end endsumx1 = sum(w1,1); for i=1:4meanx1(1,i)=sumx1(1,i)/N; end%求第二类样本均值 for i = 1:N for j = 1:4 w2(i,j) = iris(i+50,j+1);end endsumx2 = sum(w2,1); for i=1:4meanx2(1,i)=sumx2(1,i)/N; end%求第三类样本均值 for i = 1:N for j = 1:4w3(i,j) = iris(i+100,j+1); end endsumx3 = sum(w3,1); for i=1:4meanx3(1,i)=sumx3(1,i)/N; end(2)求每一类样本的协方差矩阵、逆矩阵1i -∑以及协方差矩阵的行列式i ∑, 协方差矩阵计算公式如下11()(),1,2,3,41i ii N i jklj j lk k l i x x j k N ωωσμμ==--=-∑其中lj x 代表i ω类的第l 个样本,第j 个特征值;ij ωμ代表i ω类的i N 个样品第j 个特征的平均值lk x 代表i ω类的第l 个样品,第k 个特征值;iw k μ代表i ω类的i N 个样品第k 个特征的平均值。
北邮信息工程模式识别实验报告

0.8514 0.4439 0.4272 0.7127 0.4129 0.7840
1.0831 0.4928 0.4353 1.0124 1.0085 0.4158
0.4164 0.5901 0.9869 0.4576 0.7676 1.0315
1.1176 1.0927 0.4841 0.8544 0.8418 0.7533
6、实验要求
1) 请把数据作为样本,根据 Fisher 选择投影方向 W 的原则,使原样本向量在 该方向上的投影能兼顾类间分布尽可能分开, 类内样本投影尽可能密集的要 求,求出评价投影方向 W 的函数,并在图形表示出来。并在实验报告中表 示出来,并求使 J F ( w) 取极大值的 w* 。用 matlab 完成 Fisher 线性分类器 的设计,程序的语句要求有注释。 2) 根据上述的结果并判断 (1, 1.5, 0.6) (1.2, 1.0, 0.55), (2.0, 0.9, 0.68), (1.2,1.5,0.89), (0.23,2.33,1.43) ,属于哪个类别,并画出数据分类 相应的结果图,要求画出其在 W 上的投影。 3) 回答如下问题,分析一下 W 的比例因子对于 Fisher 判别函数没有影响的原 因。
~ m ~ )2 (m 1 2 J F (W ) ~ 2 ~ S1 S 22
1 W * SW (m1 m2 )
上面的公式是使用 Fisher 准则求最佳法线向量的解,该式比较重要。另外,该式这种
2
形式的运算, 我们称为线性变换, 其中 m1 m2 式一个向量,SW 是 SW 的逆矩阵, 如 m1 m2
*
以上讨论了线性判别函数加权向量 W 的确定方法,并讨论了使 Fisher 准则函数极大的 d 维向量 W
模式识别专业实践报告(2篇)
第1篇一、实践背景与目的随着信息技术的飞速发展,模式识别技术在各个领域得到了广泛应用。
作为人工智能领域的一个重要分支,模式识别技术对于图像处理、语音识别、生物识别等领域的发展具有重要意义。
为了更好地理解和掌握模式识别技术,提高实际应用能力,我们组织了一次为期一个月的模式识别专业实践。
本次实践旨在通过实际操作,加深对模式识别理论知识的理解,提高解决实际问题的能力。
二、实践内容与过程1. 实践内容本次实践主要包括以下几个方面:(1)图像识别:利用深度学习算法进行图像分类、目标检测等。
(2)语音识别:实现语音信号处理、特征提取和识别。
(3)生物识别:研究指纹识别、人脸识别等生物特征识别技术。
(4)模式分类:运用机器学习算法进行数据分类和聚类。
2. 实践过程(1)理论学习:在实践开始前,我们首先对模式识别的基本理论进行了系统学习,包括图像处理、信号处理、机器学习等相关知识。
(2)项目准备:根据实践内容,我们选取了具有代表性的项目进行实践,如基于深度学习的图像识别、基于HMM的语音识别等。
(3)实验设计与实施:在导师的指导下,我们设计了实验方案,包括数据预处理、模型选择、参数调整等。
随后,我们使用Python、C++等编程语言进行实验编程,并对实验结果进行分析。
(4)问题分析与解决:在实验过程中,我们遇到了许多问题,如数据不足、模型效果不佳等。
通过查阅文献、请教导师和团队成员,我们逐步解决了这些问题。
三、实践成果与分析1. 图像识别我们使用卷积神经网络(CNN)对CIFAR-10数据集进行了图像分类实验。
实验结果表明,经过多次迭代优化,模型在测试集上的准确率达到89.5%,优于传统机器学习方法。
2. 语音识别我们采用HMM(隐马尔可夫模型)对TIMIT语音数据集进行了语音识别实验。
实验结果表明,经过特征提取和模型训练,模型在测试集上的词错误率(WER)为16.3%,达到了较好的识别效果。
3. 生物识别我们研究了指纹识别和人脸识别技术。
模式识别实习报告

一、实习背景随着科技的飞速发展,人工智能、机器学习等技术在各个领域得到了广泛应用。
模式识别作为人工智能的一个重要分支,具有广泛的应用前景。
为了更好地了解模式识别技术,提高自己的实践能力,我在2023年暑假期间参加了某科技有限公司的模式识别实习。
二、实习单位简介某科技有限公司是一家专注于人工智能、大数据、云计算等领域的科技创新型企业。
公司致力于为客户提供智能化的解决方案,业务涵盖智能识别、智能监控、智能分析等多个领域。
此次实习,我将在该公司模式识别部门进行实践学习。
三、实习内容1. 实习前期(1)了解模式识别的基本概念、原理和应用领域;(2)熟悉模式识别的相关算法,如神经网络、支持向量机、决策树等;(3)掌握Python编程语言,学会使用TensorFlow、Keras等深度学习框架。
2. 实习中期(1)参与实际项目,负责模式识别算法的设计与实现;(2)与团队成员协作,完成项目需求分析、算法优化和系统测试;(3)撰写项目报告,总结实习过程中的收获与不足。
3. 实习后期(1)总结实习期间的学习成果,撰写实习报告;(2)针对实习过程中遇到的问题,查找资料、请教同事,提高自己的解决问题的能力;(3)为后续实习工作做好充分准备。
四、实习收获与体会1. 理论与实践相结合通过实习,我深刻体会到理论与实践相结合的重要性。
在实习过程中,我将所学的模式识别理论知识运用到实际项目中,提高了自己的动手能力。
同时,通过解决实际问题,我更加深入地理解了模式识别算法的原理和应用。
2. 团队协作能力实习期间,我学会了与团队成员有效沟通、协作。
在项目中,我们共同面对挑战,分工合作,共同完成项目任务。
这使我认识到团队协作的重要性,为今后的工作打下了基础。
3. 解决问题的能力在实习过程中,我遇到了许多问题。
通过查阅资料、请教同事、独立思考等方式,我逐渐学会了如何分析问题、解决问题。
这种能力对我今后的学习和工作具有重要意义。
4. 深度学习框架的使用实习期间,我学会了使用TensorFlow、Keras等深度学习框架。
模式识别实习报告

实习报告一、实习背景及目的随着科技的飞速发展,模式识别技术在众多领域发挥着越来越重要的作用。
模式识别是指对数据进行分类、识别和解释的过程,其应用范围广泛,包括图像处理、语音识别、机器学习等。
为了更好地了解模式识别技术的原理及其在实际应用中的重要性,我参加了本次模式识别实习。
本次实习的主要目的是:1. 学习模式识别的基本原理和方法;2. 掌握模式识别技术在实际应用中的技巧;3. 提高自己的动手实践能力和团队协作能力。
二、实习内容及过程实习期间,我们团队共完成了四个模式识别项目,分别为:手写数字识别、图像分类、语音识别和机器学习。
下面我将分别介绍这四个项目的具体内容和过程。
1. 手写数字识别:手写数字识别是模式识别领域的一个经典项目。
我们使用了MNIST数据集,这是一个包含大量手写数字图片的数据集。
首先,我们对数据集进行预处理,包括归一化、数据清洗等。
然后,我们采用卷积神经网络(CNN)作为模型进行训练,并使用交叉验证法对模型进行评估。
最终,我们得到了一个识别准确率较高的模型。
2. 图像分类:图像分类是模式识别领域的另一个重要应用。
我们选择了CIFAR-10数据集,这是一个包含大量彩色图像的数据集。
与手写数字识别项目类似,我们先对数据集进行预处理,然后采用CNN进行训练。
在模型训练过程中,我们尝试了不同的优化算法和网络结构,以提高模型的性能。
最终,我们得到了一个识别准确率较高的模型。
3. 语音识别:语音识别是模式识别领域的又一项挑战。
我们使用了TIMIT数据集,这是一个包含大量语音样本的数据集。
首先,我们对语音样本进行预处理,包括特征提取、去噪等。
然后,我们采用循环神经网络(RNN)作为模型进行训练。
在模型训练过程中,我们尝试了不同的优化算法和网络结构。
最后,我们通过对模型进行评估,得到了一个较为可靠的语音识别系统。
4. 机器学习:机器学习是模式识别领域的基础。
我们使用了UCI数据集,这是一个包含多个数据集的数据集。
西交大模式识别实验报告

模式识别实验报告姓名:班级:学号:提交日期:实验一线性分类器的设计一、实验目的:掌握模式识别的基本概念,理解线性分类器的算法原理。
二、实验要求(1)学习和掌握线性分类器的算法原理;(2)在MATLAB 环境下编程实现三种线性分类器并能对提供的数据进行分类;(3)对实现的线性分类器性能进行简单的评估(例如算法使用条件,算法效率及复杂度等)。
三、算法原理介绍(1)判别函数:是指由x 的各个分量的线性组合而成的函数:0g(x)w ::t x w w w =+权向量阈值权若样本有c 类,则存在c 个判别函数,对具有0g(x)w t x w =+形式的判别函数的一个两类线性分类器来说,要求实现以下判定规则:12(x)0,y (x)0,y i i g g ωω>∈⎧⎨<∈⎩方程g(x)=0定义了一个判定面,它把两个类的点分开来,这个平面被称为超平面,如下图所示。
(2)广义线性判别函数线性判别函数g(x)又可写成以下形式:01(x)w di i i g w x ==+∑其中系数wi 是权向量w 的分量。
通过加入另外的项(w 的各对分量之间的乘积),得到二次判别函数:因为,不失一般性,可以假设。
这样,二次判别函数拥有更多的系数来产生复杂的分隔面。
此时g(x)=0定义的分隔面是一个二阶曲面。
若继续加入更高次的项,就可以得到多项式判别函数,这可看作对某一判别函数g(x)做级数展开,然后取其截尾逼近,此时广义线性判别函数可写成:或:这里y通常被成为“增广特征向量”(augmented feature vector),类似的,a被称为“增广权向量”,分别可写成:这个从d维x空间到d+1维y空间的映射虽然在数学上几乎没有变化,但十分有用。
虽然增加了一个常量,但在x空间上的所有样本间距离在变换后保持不变,得到的y向量都在d维的自空间中,也就是x空间本身。
通过这种映射,可以将寻找权向量w和权阈值w0的问题简化为寻找一个简单的权向量a。
最新中国地质大学-模式识别实习报告

《模式识别》上机实习报告学号:班级序号:姓名:指导老师:中国地质大学(武汉)信息工程学院遥感系2017年4月一、用贝叶斯估计做二类分类【问题描述】利用贝叶斯估计将某地区的遥感图像数据做二类分类,将图像中的裸土和水田加以区分,并使用envi classic的color mapping工具将分类好的图像加以颜色。
【模型方法】与分布有关的统计分类方法主要有最大似然/ 贝叶斯分类。
最大似然分类是图像处理中最常用的一种监督分类方法,它利用了遥感数据的统计特征,假定各类的分布函数为正态分布,在多变量空间中形成椭圆或椭球分布,也就是和中个方向上散布情况不同,按正态分布规律用最大似然判别规则进行判决,得到较高准确率的分类结果。
否则,用平行六面体或最小距离分类效果会更好。
【方案设计】(1)确定需要分类的地区和使用的波段和特征分类数,检查所用各波段或特征分量是否相互已经位置配准;(2)根据已掌握的典型地区的地面情况,在图像上选择训练区;(3)计算参数,根据选出的各类训练区的图像数据,计算和确定先验概率;(4)分类,将训练区以外的图像像元逐个逐类代入公式,对于每个像元,分几类就计算几次,最后比较大小,选择最大值得出类别;(5)产生分类图,给每一类别规定一个值,如果分10 类,就定每一类分别为1 ,2 ……10 ,分类后的像元值便用类别值代替,最后得到的分类图像就是专题图像. 由于最大灰阶值等于类别数,在监视器上显示时需要给各类加上不同的彩色;(6)检验结果,如果分类中错误较多,需要重新选择训练区再作以上各步,直到结果满意为止。
【结果讨论】优点:(1)生成式模型,通过计算概率来进行分类,可以用来处理多分类问题,(2)对小规模的数据表现很好,适合多分类任务,适合增量式训练,算法也比较简单。
缺点:(1)对输入数据的表达形式很敏感。
(2)需要计算先验概率,分类决策存在错误率。
局部区域:精度评价步骤:(1)首先需要将外部程序生成的分类文件转化为ENVI可以识别的分类图,方法如下:Envi打开图像->Tools->Color Mapping->Density Slice->Set default numer of ran ges(设置为聚类数目)->Applydefault ranges->output ranges to class image(2)对分类结果进行合并与命名(3)从参考影像(高分辨率影像)上选取ROI并命名,方法:Envi打开图像->Tools->Region of Interest->ROI Tools(4)将ROI文件与分类图像相关联,方法:Basic Tools->Region of Interest->Reconcile ROIs Parameters->输入参考影像->输入分类影像(5)Classification->Post Classification->Confusion Matrix->Using Groun d Truth ROIs二、用Fisher估计做二类分类【问题描述】利用Fisher估计将某地区的遥感图像数据做二类分类,将图像中的裸土和水田加以区分,并使用envi classic的color mapping工具将分类好的图像加以颜色。
哈工大模式识别实验报告
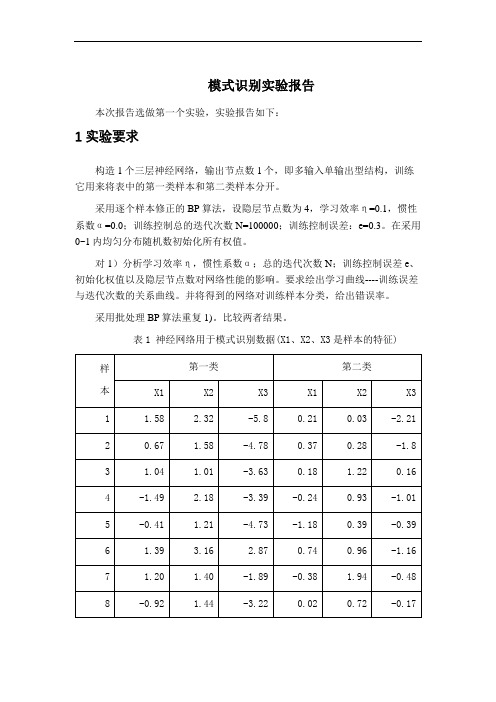
模式识别实验报告本次报告选做第一个实验,实验报告如下:1 实验要求构造1个三层神经网络,输出节点数1个,即多输入单输出型结构,训练它用来将表中的第一类样本和第二类样本分开。
采用逐个样本修正的BP算法,设隐层节点数为4,学习效率η=0.1,惯性系数α=0.0;训练控制总的迭代次数N=100000;训练控制误差:e=0.3。
在采用0~1内均匀分布随机数初始化所有权值。
对1)分析学习效率η,惯性系数α;总的迭代次数N;训练控制误差e、初始化权值以及隐层节点数对网络性能的影响。
要求绘出学习曲线----训练误差与迭代次数的关系曲线。
并将得到的网络对训练样本分类,给出错误率。
采用批处理BP算法重复1)。
比较两者结果。
表1 神经网络用于模式识别数据(X1、X2、X3是样本的特征)2 BP 网络的构建三层前馈神经网络示意图,见图1.图1三层前馈神经网络①网络初始化,用一组随机数对网络赋初始权值,设置学习步长η、允许误差ε、网络结构(即网络层数L 和每层节点数n l );②为网络提供一组学习样本; ③对每个学习样本p 循环a .逐层正向计算网络各节点的输入和输出;b .计算第p 个样本的输出的误差Ep 和网络的总误差E ;c .当E 小于允许误差ε或者达到指定的迭代次数时,学习过程结束,否则,进行误差反向传播。
d .反向逐层计算网络各节点误差)(l jp δ如果l f 取为S 型函数,即xl e x f -+=11)(,则 对于输出层))(1()()()()(l jp jdp l jp l jp l jp O y O O --=δ 对于隐含层∑+-=)1()()()()()1(l kj l jp l jp l jp l jp w O O δδe .修正网络连接权值)1()()()1(-+=+l ip l jp ij ij O k W k W ηδ式中,k 为学习次数,η为学习因子。
η取值越大,每次权值的改变越剧烈,可能导致学习过程振荡,因此,为了使学习因子的取值足够大,又不至产生振荡,通常在权值修正公式中加入一个附加动量法。
模式识别实验报告1_简单线性分类实验_实验报告(例)

二、实验环境、内容和方法
环境:windows XP,matlab R2007a
内容:有两类样本(如鲈鱼和鲑鱼),每个样本有两个特征(如长度和亮度),每类有若干个(比如20个)样本点,假设每类样本点服从二维正态分布,自己随机给出具体数据,计算每类数据的均值点,并且把两个均值点连成一线段,用垂直平分该线段的直线作为分类边界。再根据该分类边界对一随机给出的样本判别类别。并画出相应的图形。
方法:线性分类器
三、实验过程描述
1.首先用正态分布normrnd产生两类样本,每类样本两个特征。用不同的均值(ax,ay)=(18,8),(bx,by)=(12,20)。并画出两类样本点。
2.然后,求判别分界线y=k*x+b中的k,b的值。分界线垂直于两类样本的均值点的连线。K,b的值分别为:
k=-(bx-ax)/(by-ay)
y2(:,1) = normrnd(by,6,1,20);
%分解线为y=k*x+b
k=-(bx-ax)/(by-ay);%计算类样本均值连线垂直平分线的斜率k
b=(ay+by)/2+(bx^2-ax^2)/(2*by-2*ay);%计算b的值
figure;%画点
plot(x1,y1,'om',...
实验报告(例子)
课程名称:模式识别实验名称:简单线性分类
提交时间:
专业:计算机应用技术年级:2009级姓名:
一、实验目的和要求
目的:设计简单的线性分类器,了解模式识别的基本方法。
要求:
1.产生两类样本,每类样本两个特征。
2.计算每类数据的均值点,并且把两个均值点连成一线段,用垂直平分该线段的直线作为分类边界。
模式识别实验【范本模板】

《模式识别》实验报告班级:电子信息科学与技术13级02 班姓名:学号:指导老师:成绩:通信与信息工程学院二〇一六年实验一 最大最小距离算法一、实验内容1. 熟悉最大最小距离算法,并能够用程序写出。
2. 利用最大最小距离算法寻找到聚类中心,并将模式样本划分到各聚类中心对应的类别中.二、实验原理N 个待分类的模式样本{}N X X X , 21,,分别分类到聚类中心{}N Z Z Z , 21,对应的类别之中.最大最小距离算法描述:(1)任选一个模式样本作为第一聚类中心1Z 。
(2)选择离1Z 距离最远的模式样本作为第二聚类中心2Z 。
(3)逐个计算每个模式样本与已确定的所有聚类中心之间的距离,并选出其中的最小距离.(4)在所有最小距离中选出一个最大的距离,如果该最大值达到了21Z Z -的一定分数比值以上,则将产生最大距离的那个模式样本定义为新增的聚类中心,并返回上一步.否则,聚类中心的计算步骤结束。
这里的21Z Z -的一定分数比值就是阈值T ,即有:1021<<-=θθZ Z T(5)重复步骤(3)和步骤(4),直到没有新的聚类中心出现为止。
在这个过程中,当有k 个聚类中心{}N Z Z Z , 21,时,分别计算每个模式样本与所有聚类中心距离中的最小距离值,寻找到N 个最小距离中的最大距离并进行判别,结果大于阈值T 是,1+k Z 存在,并取为产生最大值的相应模式向量;否则,停止寻找聚类中心。
(6)寻找聚类中心的运算结束后,将模式样本{}N i X i ,2,1, =按最近距离划分到相应的聚类中心所代表的类别之中。
三、实验结果及分析该实验的问题是书上课后习题2。
1,以下利用的matlab 中的元胞存储10个二维模式样本X {1}=[0;0];X{2}=[1;1];X {3}=[2;2];X{4}=[3;7];X{5}=[3;6]; X{6}=[4;6];X{7}=[5;7];X{8}=[6;3];X{9}=[7;3];X{10}=[7;4];利用最大最小距离算法,matlab 运行可以求得从matlab 运行结果可以看出,聚类中心为971,,X X X ,以1X 为聚类中心的点有321,,X X X ,以7X 为聚类中心的点有7654,,,X X X X ,以9X 为聚类中心的有1098,,X X X 。
模式识别的报告(1)
模式识别实验报告(2)姓名:某某某班号:075113学号:2011100xxxx指导老师:马丽基于kNN算法的遥感图像分类一、目标:1. 掌握KNN算法原理2. 用MATLAB实现kNN算法,并进行结果分析二、算法分析:所谓K最近邻,就是k个最近的邻居的意思,说的是每个样本都可以用她最接近的k个邻居来代表。
kNN算法的核心思想是如果一个样本在特征空间中的k 个最相似的样本中的大多数属于某一个类别,则该样本也属于这个类别,并具有这个类别上样本的特性。
该方法在确定分类决策上只依据最邻近的一个或者几个样本的类别来决定待分样本所属的类别。
kNN方法在类别决策时,只与极少量的相邻样本有关。
由于kNN方法主要靠周围有限的邻近的样本,而不是靠判别类域的方法来确定所属类别的,因此对于类域的交叉或重叠较多的待分样本集来说,kNN方法较其他方法更为适合。
三、实验内容:1.利用所有带标记的数据作为train数据,调用KNN分类函数KNN_Cla()对整个图像进行分类,得到整个图像的分类结果图。
2.随机在所有带标记的数据中选择train和test数据(50%train数据,50%test 数据)然后进行kNN分类。
随机选择10次,计算总体分类精度OA,然后求平均结果,作为最终对算法的评价。
K值依次选择1,3,5,7,9,11,分别用这6种K的取值进行kNN算法,得到每种K值下的总体分类精度OA,然后进行比较。
分类结果:四、数据介绍:zy3sample1:资源三号卫星遥感图,Img为读入遥感图生成的400*400*4矩阵。
xy3roi:ROI数据,GT为读入ROI生成的400*400矩阵。
INP_200:INP高光谱数据145*145*200。
92A V3GT_cls:ROI数据45*145。
五、实验程序:function [result,OA]=knn_classifier(X_train,Y_train,X_test,Y_test,options)%% 实现KNN分类% 输入参数% X_train : N*D% Y_train : 1*N% X_test : N*D% 输出参数% result :N*1% OA :精确度for k=1:len%一次处理1个点len=length(X_test);d=Euclidian_distance(X_train,X_test(k,:);%计算所有待分类点到所有训练点的距离[D,n]=sort(d);ind=n(1:option.K);%找到所有距离中最小的K个距离for k=1:len%一次处理1个点C(k)=length(find(Y_train(ind)==k);endindc=find(max(C));result(k)=indc(1);end;error=length(find(result'~=Y_test));%求出差错率OA=1-error/len;六、实验结果:zy3sample数据KNN分类结果(K=1):不同k值下的OA变化曲线图:七、心得体会:这次的程序主要是弄懂KNN 算法的思想就可以画出流程图其实最主要的就是搞清楚中间迭代部分的写法。
模式识别学习报告(团队)
模式识别学习报告(团队)
简介
本报告是我们团队就模式识别研究所做的总结和讨论。
模式识别是一门关于如何从已知数据中提取信息并作出决策的学科。
在研究过程中,我们通过研究各种算法和技术,了解到模式识别在人工智能、机器研究等领域中的重要性并进行实践操作。
研究过程
在研究过程中,我们首先了解了模式识别的基本概念和算法,如KNN算法、朴素贝叶斯算法、决策树等。
然后我们深入研究了SVM算法和神经网络算法,掌握了它们的实现和应用场景。
在实践中,我们使用了Python编程语言和机器研究相关的第三方库,比如Scikit-learn等。
研究收获
通过研究,我们深刻认识到模式识别在人工智能、机器研究领域中的重要性,了解到各种算法和技术的应用场景和优缺点。
同时我们也发现,在实践中,数据的质量决定了模型的好坏,因此我们需要花费更多的时间来处理数据方面的问题。
团队讨论
在研究中,我们也进行了很多的团队讨论和交流。
一方面,我们优化了研究方式和效率,让研究更加有效率;另一方面我们还就机器研究的基本概念和算法的前沿发展进行了讨论,并提出了一些有趣的问题和方向。
总结
通过学习和团队讨论,我们深刻认识到了模式识别在人工智能和机器学习领域中的核心地位,并获得了实践经验和丰富的团队协作经验。
我们相信这些学习收获和经验会在今后的学习和工作中得到很好的应用。
模式识别实验报告
二、实验步骤 前提条件: 只考虑第三种情况:如果 di(x) >dj(x) 任意 j≠ i ,则判 x∈ωi 。
○1 、赋初值,分别给 c 个权矢量 wi(1)(i=1,2,…c)赋任意的初
值,选择正常数ρ ,置步数 k=1;
○2 、输入符号未规范化的增广训练模式 xk, xk∈{x1, x2… xN} ,
二、实验步骤
○1 、给出 n 个混合样本,令 I=1,表示迭代运算次数,选取 c
个初始聚合中心 ,j=1,2,…,c;
○2 、 计 算 每 个 样 本 与 聚 合 中 心 的 距 离
,
。
若
, ,则
。
○3 、 计 算 c 个 新 的 聚 合 中 心 :
,
。
○4 、判断:若
,
,则 I=I+1,返回
第二步 b 处,否则结束。 三、程序设计
聚类没有影响。但当 C=2 时,该类别属于正确分类。 而类别数目大于 2 时,初始聚合中心对聚类的影响非常大,仿真
结果多样化,不能作为分类标准。 2、考虑类别数目对聚类的影响: 当类别数目变化时,结果也随之出现变化。 3、总结 综上可知,只有预先分析过样本,确定合适的类别数目,才能对
样本进行正确分类,而初始聚合中心对其没有影响。
8
7
6
5
4
3
2
1
0
0
1
2
3
4
5
6
7
8
9
初始聚合中心为(0,0),(2,2),(5,5),(7,7),(9,9)
K-均 值 聚 类 算 法 : 类 别 数 目 c=5 9
8
7
6
5
4
模式识别实验报告一二.doc

信息与通信工程学院模式识别实验报告班级:姓名:学号:日期:2011年12月实验一、Bayes 分类器设计一、实验目的:1.对模式识别有一个初步的理解2.能够根据自己的设计对贝叶斯决策理论算法有一个深刻地认识3.理解二类分类器的设计原理二、实验条件:matlab 软件三、实验原理:最小风险贝叶斯决策可按下列步骤进行: 1)在已知)(i P ω,)(i X P ω,i=1,…,c 及给出待识别的X 的情况下,根据贝叶斯公式计算出后验概率:∑==cj iii i i P X P P X P X P 1)()()()()(ωωωωω j=1,…,x2)利用计算出的后验概率及决策表,按下面的公式计算出采取ia ,i=1,…,a 的条件风险∑==cj j jii X P a X a R 1)(),()(ωωλ,i=1,2,…,a3)对(2)中得到的a 个条件风险值)(X a R i ,i=1,…,a 进行比较,找出使其条件风险最小的决策ka ,即()()1,min k i i aR a x R a x ==则ka 就是最小风险贝叶斯决策。
四、实验内容假定某个局部区域细胞识别中正常(1ω)和非正常(2ω)两类先验概率分别为 正常状态:P (1ω)=0.9; 异常状态:P (2ω)=0.1。
现有一系列待观察的细胞,其观察值为x :-3.9847 -3.5549 -1.2401 -0.9780 -0.7932 -2.8531 -2.7605 -3.7287 -3.5414 -2.2692 -3.4549 -3.0752 -3.9934 2.8792 -0.9780 0.7932 1.1882 3.0682 -1.5799 -1.4885 -0.7431 -0.4221 -1.1186 4.2532 已知先验概率是的曲线如下图:)|(1ωx p )|(2ωx p 类条件概率分布正态分布分别为(-2,0.25)(2,4)试对观察的结果进行分类。
模式识别技术实验报告

模式识别技术实验报告本实验旨在探讨模式识别技术在计算机视觉领域的应用与效果。
模式识别技术是一种人工智能技术,通过对数据进行分析、学习和推理,识别其中的模式并进行分类、识别或预测。
在本实验中,我们将利用机器学习算法和图像处理技术,对图像数据进行模式识别实验,以验证该技术的准确度和可靠性。
实验一:图像分类首先,我们将使用卷积神经网络(CNN)模型对手写数字数据集进行分类实验。
该数据集包含大量手写数字图片,我们将训练CNN模型来识别并分类这些数字。
通过调整模型的参数和训练次数,我们可以得到不同准确度的模型,并通过混淆矩阵等评估指标来评估模型的性能和效果。
实验二:人脸识别其次,我们将利用人脸数据集进行人脸识别实验。
通过特征提取和比对算法,我们可以识别不同人脸之间的相似性和差异性。
在实验过程中,我们将测试不同算法在人脸识别任务上的表现,比较它们的准确度和速度,探讨模式识别技术在人脸识别领域的应用潜力。
实验三:异常检测最后,我们将进行异常检测实验,使用模式识别技术来识别图像数据中的异常点或异常模式。
通过训练异常检测模型,我们可以发现数据中的异常情况,从而做出相应的处理和调整。
本实验将验证模式识别技术在异常检测领域的有效性和实用性。
结论通过以上实验,我们对模式识别技术在计算机视觉领域的应用进行了初步探索和验证。
模式识别技术在图像分类、人脸识别和异常检测等任务中展现出了良好的性能和准确度,具有广泛的应用前景和发展空间。
未来,我们将进一步深入研究和实践,探索模式识别技术在更多领域的应用,推动人工智能技术的发展和创新。
【字数:414】。
模式识别实验报告哈工程

一、实验背景随着计算机科学和信息技术的飞速发展,模式识别技术在各个领域得到了广泛应用。
模式识别是指通过对数据的分析、处理和分类,从大量数据中提取有用信息,从而实现对未知模式的识别。
本实验旨在通过实践操作,加深对模式识别基本概念、算法和方法的理解,并掌握其应用。
二、实验目的1. 理解模式识别的基本概念、算法和方法;2. 掌握常用的模式识别算法,如K-均值聚类、决策树、支持向量机等;3. 熟悉模式识别在实际问题中的应用,提高解决实际问题的能力。
三、实验内容本次实验共分为三个部分:K-均值聚类算法、决策树和神经网络。
1. K-均值聚类算法(1)实验目的通过实验加深对K-均值聚类算法的理解,掌握其基本原理和实现方法。
(2)实验步骤① 准备实验数据:选取一组二维数据,包括100个样本,每个样本包含两个特征值;② 初始化聚类中心:随机选择K个样本作为初始聚类中心;③ 计算每个样本到聚类中心的距离,并将其分配到最近的聚类中心;④ 更新聚类中心:计算每个聚类中所有样本的均值,作为新的聚类中心;⑤ 重复步骤③和④,直到聚类中心不再变化。
(3)实验结果通过实验,可以得到K个聚类中心,每个样本被分配到最近的聚类中心。
通过可视化聚类结果,可以直观地看到数据被分成了K个类别。
2. 决策树(1)实验目的通过实验加深对决策树的理解,掌握其基本原理和实现方法。
(2)实验步骤① 准备实验数据:选取一组具有分类标签的二维数据,包括100个样本,每个样本包含两个特征值;② 选择最优分割特征:根据信息增益或基尼指数等指标,选择最优分割特征;③ 划分数据集:根据最优分割特征,将数据集划分为两个子集;④ 递归地执行步骤②和③,直到满足停止条件(如达到最大深度、叶节点中样本数小于阈值等);⑤ 构建决策树:根据递归分割的结果,构建决策树。
(3)实验结果通过实验,可以得到一棵决策树,可以用于对新样本进行分类。
3. 神经网络(1)实验目的通过实验加深对神经网络的理解,掌握其基本原理和实现方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数学与计算机学院课程名称: 模式识别题目: PCA数据分析-基于人脸数据实现任课老师: 王晓明年级专业: 2011级计算机应用技术姓名: 韩笑学号: 312011*********时间:2013 年11月 9 日目录一PCA数据分析-人脸识别介绍 (2)二PCA数据分析-人脸数据实现算法描述 (3)三PCA数据分析-基于人脸数据实现 (5)1 数据读入 (5)2 算法运行结果 (6)四总结和心得 (8)五附录——核心算法的主要源代码 (9)参考文献 (14)PCA数据分析一PCA数据分析-人脸识别介绍随着计算机及网络技术的高速发展,将身份数字、隐性化、并准确鉴定身份、保证信息安全显示出前所未有的重要性。
生物识别技术是通过计算机利用人类自身的生物特性进行身份认证,具有不易被修改、被盗或被人冒用,而且随时随地都可以使用等特点。
因而,基于面相,语言、指纹等人的内在属性的生物识别技术以其稳定性和可靠性得到了广泛关注。
相较指纹、基因等其他生物特性的鉴别方法,人脸识别具有更直接、友好、方便等特点,并以其非侵犯性更易为用户所接受。
历史上最早的关于人脸识别的论文研究见于1965年,Chan&Bledsoe在Panoramic Research Inc 发表的技术报告,到现在已经差不多五十多年的历史了。
最近的30年来,人脸自动识别系统的开发研究取得了较大的进展,已经检索相关文献达到数千篇,还有专门的国际学术会议。
自从1990年以来,人脸识别更得到了很大的发展,每年都有大量的学术论文发表。
国内在人脸识别方面起步较晚,大约至1995年以来,在国内一些项目资金的资助下,开始了大量的研究,其中包括国内主要的计算机实验室和高校,他们在人脸识别领域总结了不少经验,每年都有大量的论文发表。
由于技术上的一些局限性,以及复杂的环境因素的干扰,导致在各个领域还未能广泛的使用,只是在某些领域初步的应用。
PCA,即Principal Component Analysis,主成分分析方法,是一种得到广泛应用的事实上的标准人脸识别方法。
是一种掌握事物主要矛盾的统计分析方法,它可以从多元事物中解析出主要影响因素,揭示事物的本质,简化复杂的问题。
计算主成分的目的是将高维数据投影到较低维空间。
给定 n 个变量的 m 个观察值,形成一个n ′ m 的数据矩阵, n 通常比较大。
对于一个由多个变量描述的复杂事物,人们难以认识,那么是否可以抓住事物主要方面进行重点分析呢?如果事物的主要方面刚好体现在几个主要变量上,我们只需要将这几个变量分离出来,进行详细分析。
但是,在一般情况下,并不能直接找出这样的关键变量。
这时我们可以用原有变量的线性组合来表示事物的主要方面, PCA 就是这样一种分析方法。
PCA 的目标是寻找r (r<n )个新变量,使它们反映事物的主要特征,压缩原有数据矩阵的规模。
每个新变量是原有变量的线性组合,体现原有变量的综合效果,具有一定的实际含义。
这r 个新变量称为“主成分”,它们可以在很大程度上反映原来n 个变量的影响,并且这些新变量是互不相关的,也是正交的。
通过主成分分析,压缩数据空间,将多元数据的特征在低维空间里直观地表示出来。
它的基本原理是:利用K-L变换抽取人脸的主要成分,构成特征脸空间,识别时将测试图像投影到此空间,得到一组投影系数,通过与各个人脸图像比较进行识别。
这种方法使得压缩前后的均方误差最小,且变换后的低维空间有很好的分辨能力。
二 PCA 数据分析--人脸数据实现算法描述1.K-L 变换PCA 方法是由Turk 和Pentlad 提出来的,它的基础就是Karhunen-Loeve 变换(简称K-L 变换),是一种常用的正交变换。
首先对K-L 变换作一个简单介绍: 假设X 为n 维的随机变量,X 可以用n 个基向量的加权和来表示:1ni i i x αθ==∑ 式中:i α是加权系数,i θ是基向量,此式可以用矩阵的形式表示:()()1212,,.....,,......T n n x θθθαααθα==系数向量为:T x αθ=综上所述,K-L 展开式的系数可用下列步骤求出:步骤一 求随机向量X 的自相关矩阵T R E x x ⎡⎤=⎣⎦,由于没有类别信息的样本集的μ均值向量,常常没有意义,所以也可以把数据的协方差矩阵()()T E x u x u ⎡⎤∑=--⎣⎦作为K-L 坐标系的产生矩阵,这里μ是总体均值向量。
步骤二 求出自相关矩阵或者协方差矩阵R 的本征值i λ和本征向量i θ,()12,,......n θθθθ=步骤三 展开式系数即为T x αθ=K-L 变换的实质是建立一个新的坐标系,将一个物体主轴沿特征矢量对齐的转变换,这个变换解除了原有数据向量的各个分量之间相关性,从而有可能去掉那些带有较少信息的坐标系以达到降低特征空间维数的目的。
2. P CA 方法P CA 方法,也被叫做特征脸方法(eigenfaces),是一种基于整幅人脸图像的识别算法,被广泛用于降维,在人脸识别领域也表现突出。
一个N ×N 的二维脸部图片可以看成是N 的一个一维向量,一张112×92的图片可以看成是一个10,304维的向量,同时也可以看成是一个10,304维空间中一点。
图片映射到这个巨大的空间后,由于人脸的构造相对来说比较接近,因此,可以用一个相应的低维子空间来表示。
我们把这个子空间叫做“脸空间”。
PCA 的主要思想就是找到能够最好地说明图片在图片空间中的分布情况的那些向量。
这些向量能够定义“脸空间”,每个向量的长度为N ,描述一张N ×N 的图片,并且是原始脸部图片的一个线性组合。
对于一副M N ⨯的人脸图像,将其每列相连构成一个大小为D=M N ⨯维的列向量。
D 就是人脸图像的维数,也即是图像空间的维数。
设n 是训练样本的数目;j x 表示第j 幅人脸图像形成的人脸向量,则所需样本的协方差矩阵为:()()1nTj i j sr x u x u ==--∑ (1) 其中u 为训练样本的平均图像向量:11nj j u x n ==∑ (2) 令[]12,,.....n A x u x u x u =---,则有T sr AA =,其维数为D D ⨯。
根据K-L 变换原理,需要求得的新坐标系由矩阵T AA 的非零特征值所对应得特征向量组成。
直接计算的计算量比较大,所以采用奇异值分解(SVD )定理,通过求解T AA 的特征值和特征向量来获得T AA 的特征值和特征向量。
依据SVD 定理,令()1,2,......,i l i r =为矩阵T AA 的r 个非零特征值i v 为T AA 对应于i l 的特征向量,则T AA 的正交归一特征向量i u 为:i i u Av =(i=1,2,……r) (3) 则特征脸空间为:()12,,......u r w u u =。
3. 再举一个简单的例子,加深理解: 1.对于一个训练集,100个sample(i=1,2,3,...,100),特征i x 是20维.12320,,,...x ,...i i i ij i x x x x ⎡⎤⎣⎦(j=1,2,..,20),那么它可以建立一个20100⨯的样本矩阵M 。
2.紧接着我们开始求这个样本的协方差矩阵,得到一个2020⨯的协方差矩阵,计算过程如下: •先求解出i x 的平均()20i v x x ∂=∑; •对每一个i x ,计算i v x x ∂-,即i M (第 i 行)变为 i v M x ∂-,记为n M ;•则容易得到协方差矩阵Z 为n M ⨯'n M ( ' 表示转置 ) 。
3. 然后求出这个协方差矩阵Z 2020⨯的特征值和特征向量,一般情况下应该有20个特征值和特征向量,现在根据特征值的大小,取出较大的特征值以及其所对应的特征向量,(假设提取的特征值为较大的5个特征值),那么这5个特征向量就会构成一个205⨯的矩阵V ,这个矩阵就是我们要求的特征矩阵。
4. 用'n M 去乘以V ,得到一个base 矩阵(*),大小为1005⨯。
5. 任取一个样本1100⨯,乘上这个1005⨯的特征矩阵,就得到了一个15⨯的新的样本,显然每个sample 的维数下降了,然后再用这个15⨯向量去比较相似性。
三 PCA 数据分析--基于人脸数据实现1 数据读入利用特征脸空间投影来识别人脸一般经过三个步骤:首先利用训练图像数据构建特征脸空间,然后将训练图像投影到特征子空间上,最后待识别图像也投影到特征子空间上,并且与投影后的训练图像相比较,得出识别结果。
以下分别介绍这三个步骤:1.1 读入人脸库归一化人脸库后,将库中的没人选择一定数量的图像构成训练集,其余的构成测试集。
设归一化后的图像时n m ⨯维,按列相连就构成N=n m ⨯维矢量,可视为N 维空间中的一个点,可以空过K-L 变换用一个低维子空间描述这个图像。
1.2 计算通过K-L 变换的生成矩阵所有训练样本的协方差矩阵为(以下三个等价);11M T T k k x x k C x x M m m =⎛⎫=- ⎪⎝⎭∑1T C AA M =()12,,......m A θθθ=, i i x x m θ=-,其中x m 是平均人脸,M 是训练人脸数,协方差矩阵1C 是一个N N ⨯的矩阵,N 是i x 的维数。
注:特征值与特征向量的选取直到目前为止,我们创建用于投影的特征脸子空间使用的是所有k 个非零的特征值对应的特征向量。
虽然协方差矩阵Ω最多有对应于非零特征值的P 个特征向量,且k p ≤,但是通常情况下,k 仍然会很大,而事实上,根据应用的要求,并非所有的i u 都有很大的保留意义。
而特征空间投影的计算速度是直接与创建子空间所用的特征向量的数目相关,若考虑到计算时间的因素,可以适当的减去一些信息量少的特征向量,而且,去掉这些特征向量之后不一定不利于分类结果,有的情况下反而能够提高识别性能。
下面将讨论五种不同的特征值选择方法:(1)标准的特征空伺投影:所有k 个对应于非零特征值的特征向量均被用于创建特征脸子空间。
该方法在k 值比较大的时候,计算速度比较慢,而且不利于分类。
(2)丢弃最后40%的特征向量:因为特征向量是按照特征值降序来排列的,该方法丢弃了反映最少的40%图像间差异的特征向量。
(3)保持前面的C-1个特征向量:将特征值按照降序排列,同时只保留最前面的C-1个特征向量。
其中C 为训练图像的类别数。
(4)按照计算信息量来确定维数:不同于前面固定的丢弃一些特征向量,该方法采用保证剩余的特征向量所包含的信息与总的信息量相比大于一定的阀值e。
可以依照下列公式计算:(5)丢弃最前面的三个特征向量:对应于最大三个特征值的特征向量往往反应了图像间由于光线不同而造成的差异。