计算机算法设计与分析_第四章_1
算法设计与分析知到章节答案智慧树2023年天津大学

算法设计与分析知到章节测试答案智慧树2023年最新天津大学第一章测试1.下列关于效率的说法正确的是()。
参考答案:提高程序效率的根本途径在于选择良好的设计方法,数据结构与算法;效率主要指处理机时间和存储器容量两个方面;效率是一个性能要求,其目标应该在需求分析时给出2.算法的时间复杂度取决于()。
参考答案:问题的规模;待处理数据的初态3.计算机算法指的是()。
参考答案:解决问题的有限运算序列4.归并排序法的时间复杂度和空间复杂度分别是()。
参考答案:O(nlog2n);O(n)5.将长度分别为m,n的两个单链表合并为一个单链表的时间复杂度为O(m+n)。
()参考答案:错6.用渐进表示法分析算法复杂度的增长趋势。
()参考答案:对7.算法分析的两个主要方面是时间复杂度和空间复杂度的分析。
()参考答案:对8.某算法所需时间由以下方程表示,求出该算法时间复杂度()。
参考答案:O(nlog2n)9.下列代码的时间复杂度是()。
参考答案:O(log2N)10.下列算法为在数组A[0,...,n-1]中找出最大值和最小值的元素,其平均比较次数为()。
参考答案:3n/2-3/2第二章测试1.可用Master方法求解的递归方程的形式为()。
参考答案:T(n)=aT(n/b)+f(n) , a≥1, b>1, 为整数, f(n)>0.2.参考答案:对3.假定,, 递归方程的解是. ( )参考答案:对4.假设数组A包含n个不同的元素,需要从数组A中找出n/2个元素,要求所找的n/2个元素的中点元素也是数组A的中点元素。
针对该问题的任何算法需要的时间复杂度的下限必为。
( )参考答案:错5.使用Master方法求解递归方程的解为().参考答案:6.考虑包含n个二维坐标点的集合S,其中n为偶数,且所有坐标点中的均不相同。
一条竖直的直线若能把S集合分成左右两部分坐标点个数相同的子集合,则称直线L为集合S的一条分界线。
若给定集合S,则可在时间内找到这条分界线L。
计算机算法设计与分析(第5版)

作者简介
王晓东:男,1957年生,山东人,福建工程学院副院长,教授,博士生导师,福建省计算机学会理事长。主 讲课程:算法与数据结构、算法设计与分析、文献阅读与选题报告 。
目录
(注:目录排版顺序为从左列至右列 )
教学资源
《计算机算法设计与分析(第5版)》有配套教材——《计算机算法设计与分析习题解答(第5版)》 。
教材特色
《计算机算法设计与分析(第5版)》修正了第4版中发现的一些错误,并将各章的习题分为算法分析题和算 法实现题两部分,增加了算法实践性内容,增加了有关串和序列的算法内容。
《计算机算法设计与分析(第5版)》由王晓东担任主编;傅清祥教授、吴英杰教授、傅仰耿博士和朱达欣教 授参加了该教材有关章节的讨论,对该教材内容及各章节的编排提出了意见;田俊教授审阅了全书。该教材在编 写过程中,得到了全国高等学校计算机专业教学指导委员会的支持。福州大学“211工程”计算机与信息工程重 点学科实验室和福建工程学院为该教材的写作提供了设备和工作环境 。
该教材各章的论述中,首先介绍一种算法设计策略的基本思想,然后从解决计算机科学和应用中的实际问题 入手,描述几个算法。同时对每个算法所需的时间和空间进行分析,使读者既能学到一些常用的算法,也能通过 对算法设计策略的反复应用,牢固掌握这些算法设计的基本策略。该教材选择某些问题,通过对解同一问题的不 同算法的比较,使读者体会到每种算法的设计要点。
2018年8月,该教材由电子工业出版社出版 。
计算机算法设计与分析

计算机算法设计与分析计算机算法设计与分析在计算机科学领域扮演着重要的角色。
它是研究和开发高效算法的过程,以解决各种计算问题。
在本文中,我们将探讨算法设计与分析的基本原理、常见算法类型以及算法分析的重要性。
一、算法设计与分析的基本原理算法设计的目标是开发一种能够解决特定问题的步骤序列。
这些步骤应该是明确的、非歧义的,并且能够在有限的时间内产生预期的结果。
为了实现这一目标,算法设计需要考虑以下几个主要原理:1. 问题抽象:将实际问题转化为计算机能够理解和处理的抽象形式。
这涉及到定义输入和输出,以及建立问题的数学模型。
2. 分解与合成:将复杂问题分解为更简单的子问题,然后将子问题的解合并成原始问题的解。
这种分解与合成的过程可以提高算法的可读性和效率。
3. 数据结构选择:选择适当的数据结构来存储和操作问题的输入和输出。
不同的数据结构对于不同的问题具有不同的性能和效率。
4. 控制结构设计:设计算法控制结构,如循环、条件语句和递归等,以实现预期的计算过程。
二、常见的算法类型在算法设计与分析中,有各种各样的算法类型可供选择。
以下是一些常见的算法类型:1. 排序算法:排序算法用于按照一定的规则对数据进行排序。
常见的排序算法包括冒泡排序、插入排序、选择排序、归并排序和快速排序等。
2. 搜索算法:搜索算法用于查找指定数据的位置或者判断数据是否存在。
常见的搜索算法包括线性搜索、二分搜索和哈希搜索等。
3. 图算法:图算法用于处理图数据结构上的问题。
常见的图算法包括最短路径算法、最小生成树算法和拓扑排序算法等。
4. 动态规划算法:动态规划算法用于解决一些最优化问题,它通过将问题分解为子问题,并利用已解决的子问题的解来解决原始问题。
三、算法分析的重要性算法分析是评估算法性能和效率的过程,它对于算法设计与分析至关重要。
通过对算法进行分析,我们可以了解算法的时间复杂度、空间复杂度和性能边界等关键指标。
这些指标可以帮助我们选择最适合特定问题的算法,并预测算法在不同输入情况下的表现。
(整理)《计算机算法-设计与分析导论》课后习题答案.

4.1:在我们所了解的早期排序算法之中有一种叫做Maxsort 的算法。
它的工作流程如下:首先在未排序序列(初始时为整个序列)中选择其中最大的元素max ,然后将该元素同未排序序列中的最后一个元素交换。
这时,max 元素就包含在由每次的最大元素组成的已排序序列之中了,也就说这时的max 已经不在未排序序列之中了。
重复上述过程直到完成整个序列的排序。
(a) 写出Maxsort 算法。
其中待排序序列为E ,含有n 个元素,脚标为范围为0,,1n -。
void Maxsort(Element[] E) { int maxID = 0;for (int i=E.length; i>1; i--) { for (int j=0; j<i; j++) {if (E[j] > E[maxID]) maxID = k; }E[i] <--> E[maxID]; } }最坏情况同平均情况是相同的都是11(1)()2n i n n C n i -=-==∑。
几遍浏览序列实现。
排序策略是顺序比较相邻元素,如果这两个元素未排序则交换这两个元素的位置。
也就说,首先比较第一个元素和第二个元素,如果第一个元素大于第二个元素,这交换这两个元素的位置;然后比较第二个元素与第三个元素,按照需要交换两个元素的位起泡排序的最坏情况为逆序输入,比较次数为11(1)()2n i n n C n i -=-==∑。
(b) 最好情况为已排序,需要(n-1)次比较。
4.3: (a)归纳法:当n=1时显然成立,当n=2时经过一次起泡后,也显然最大元素位于末尾;现假设当n=k-1是,命题也成立,则当n=k 时,对前k-1个元素经过一次起泡后,根据假设显然第k-1个元素是前k-1个元素中最大的,现在根据起泡定义它要同第k 个元素进行比较,当k元素大于k-1元素时,它为k个元素中最大的,命题成立;当k元素小于k-1元素时,它要同k-1交换,这时处于队列末尾的显然时队列中最大的元素。
算法设计与分析第三版第四章课后习题答案
算法设计与分析第三版第四章课后习题答案4.1 线性时间选择问题习题4.1问题描述:给定一个长度为n的无序数组A和一个整数k,设计一个算法,找出数组A中第k小的元素。
算法思路:本题可以使用快速选择算法来解决。
快速选择算法是基于快速排序算法的思想,通过递归地划分数组来找到第k小的元素。
具体步骤如下: 1. 选择数组A的一个随机元素x作为枢纽元。
2. 使用x将数组划分为两个子数组A1和A2,其中A1中的元素小于等于x,A2中的元素大于x。
3. 如果k等于A1的长度,那么x就是第k小的元素,返回x。
4. 如果k小于A1的长度,那么第k小的元素在A1中,递归地在A1中寻找第k小的元素。
5. 如果k大于A1的长度,那么第k小的元素在A2中,递归地在A2中寻找第k-A1的长度小的元素。
6. 递归地重复上述步骤,直到找到第k小的元素。
算法实现:public class LinearTimeSelection {public static int select(int[] A, int k) { return selectHelper(A, 0, A.length - 1, k);}private static int selectHelper(int[] A, int left, int right, int k) {if (left == right) {return A[left];}int pivotIndex = partition(A, left, righ t);int length = pivotIndex - left + 1;if (k == length) {return A[pivotIndex];} else if (k < length) {return selectHelper(A, left, pivotInd ex - 1, k);} else {return selectHelper(A, pivotIndex + 1, right, k - length);}}private static int partition(int[] A, int lef t, int right) {int pivotIndex = left + (right - left) / 2;int pivotValue = A[pivotIndex];int i = left;int j = right;while (i <= j) {while (A[i] < pivotValue) {i++;}while (A[j] > pivotValue) {j--;}if (i <= j) {swap(A, i, j);i++;j--;}}return i - 1;}private static void swap(int[] A, int i, int j) {int temp = A[i];A[i] = A[j];A[j] = temp;}}算法分析:快速选择算法的平均复杂度为O(n),最坏情况下的复杂度为O(n^2)。
《算法设计与分析》(全)
1.1、算法与程序
程序:是算法用某种程序设计语言的具体实现。 程序可以不满足算法的性质(4)。 例如操作系统,是一个在无限循环中执行的程序, 因而不是一个算法。 操作系统的各种任务可看成是单独的问题,每一个 问题由操作系统中的一个子程序通过特定的算法来实 现。该子程序得到输出结果后便终止。
渐近分析记号的若干性质
(1)传递性: ➢ f(n)= (g(n)), g(n)= (h(n)) f(n)= (h(n)); ➢ f(n)= O(g(n)), g(n)= O (h(n)) f(n)= O (h(n)); ➢ f(n)= (g(n)), g(n)= (h(n)) f(n)= (h(n)); ➢ f(n)= o(g(n)), g(n)= o(h(n)) f(n)= o(h(n)); ➢ f(n)= (g(n)), g(n)= (h(n)) f(n)= (h(n)); (2)反身性: ➢ f(n)= (f(n));f(n)= O(f(n));f(n)= (f(n)). (3)对称性: ➢ f(n)= (g(n)) g(n)= (f(n)) . (4)互对称性: ➢ f(n)= O(g(n)) g(n)= (f(n)) ; ➢ f(n)= o(g(n)) g(n)= (f(n)) ;
巢湖学院计算机科学与技术系
渐近分析记号的若干性质
规则O(f(n))+O(g(n)) = O(max{f(n),g(n)}) 的证明: ➢ 对于任意f1(n) O(f(n)) ,存在正常数c1和自然数n1,使得对
所有n n1,有f1(n) c1f(n) 。 ➢ 类似地,对于任意g1(n) O(g(n)) ,存在正常数c2和自然数
巢湖学院计算机科学与技术系
第1章 算法引论
习题答案第四章 算法设计与分析 吕国英
习题答案第四章算法设计与分析吕国英main(void){ int buf[100]; int n; int i,j,k; scanf("%d",&n);for(i=0;i<n;i++)buf[i]=2; for(i=0;i<n-1;i++){ for(j=0;j<n-i-1;j++){ buf[j]+=2; } } for(j=0;j<n;j++){ if(buf[j]>=10){ buf[j+1]+=buf[j]/10; buf[j]=buf[j]%10; } } for(i=n-1;i>=0;i--)printf("%d",buf[i]); printf("\n"); return 0; }2、#include<stdio、h>int main(void){int n=2;inti;for(i=1;i<=9;i++){n=(n+2)*2;}printf("%d\n",n);return 0;}3、#include<stdio、h>int main(void){int a=54;int n;int m;printf("计算机先拿3张牌\n");a=a-3;while(a>=0){printf("还剩%d张牌\n",a);printf("你拿几张?请输入:");scanf("%d",&n);if(n>4||n<1||n>a){printf("错误!重新拿牌\n");continue;}a=a-n;printf("还剩%d张牌\n",a);if(a==0)break;m=5-n;printf("计算机拿%d\n",m);a=a-m;}return 0;}4、#include<stdio、h>int d;int a1,a2;intfun(int n);int main(void){intn;printf("n=?,d=?,a1=?,a2=?");scanf("%d%d%d%d\n",&n,&d,&a 1,&a2);printf("%d\n",fun(n));return 0;}int fun(intn){if(n==1)return a1;if(n==2)return a2;return fun(n-2)-(fun(n-1)-d)*2;}5、#include<stdio、h>char chess[8][8];int is_safe(int row,int col);int queen(int row,int col,int n);int main(void){inti,j;for(i=0;i<8;i++)for(j=0;j<8;j++)chess[i][j]=X;queen(0 ,0,0);for(i=0;i<8;i++){for(j=0;j<8;j++)printf("%c",chess[i][j]);printf("\n");}return 0;}int is_safe(int row,int col){inti,j;for(i=0;i<8;i++){if(chess[row][i]==Q)return0;if(chess[i][col]==Q)return 0;}i=row;j=col;while(i!=-1&&j!=-1){if(chess[i--][j--]==Q)return0;}i=row;j=col;while(i!=-1&&j!=8){if(chess[i--][j++]==Q)return 0;}i=row;j=col;while(i!=8&&j!=-1){if(chess[i++][j--]==Q)return0;}i=row;j=col;while(i!=8&&j!=8){if(chess[i++][j++]==Q)re turn 0;}return1;}int queen(int row,int col,int n){inti,j;intresult=0;if(n==8)return1;elseif(is_safe(row,col)){chess[r ow][col]=Q;for(i=0;i<8;i++)for(j=0;j<8;j++){result+=queen (i,j,n+1);if(result>0)break;}if(result>0)return1;else{chess[row][col]=X;return 0;}}elsereturn 0;}6、#include<stdio、h>int main(void){inti,j,k;for(i=1;i<=33;i++)for(j=1;j<=50;j++){k=100-i-j;if(k%2==0){if(3*i+2*j+k/2==100)printf("大马%d\n中马%d\n 小马%d\n\n\n",i,j,k);}}return 0;}7、#include<stdio、h>int main(void){inti;for(i=1;i<=10000;i++){if(i%2==1&&i%3==2&&i%5==4&&i%6==5 &&i%7==0)printf("%d\n",i);}return 0;}8、#include<stdio、h>int main(void){int i;int sum;inta1,a2,a3,a4;for(i=1000;i<=9999;i++){a1=i%10;a2=i/10%10;if (a1!=a2){a3=i/100%10;if(a1!=a3&&a2!=a3){a4=i/1000;if(a1!= a4&&a2!=a4&&a3!=a4){sum=(a1+a2+a3+a4)*(a1+a2+a3+a4);if(i% sum==0)printf("%d\n",i);}}}}return 0;}9、#include<stdio、h> #define N10 void max_min(int *a,int m,int n,int*min1,int *min2,int *max1,int *max2); int main(void) { int a[N]={2,3,4,5,34,7,9,6,43,21}; int min1,min2; int max1,max2; max_min(a,0,N-1,&min1,&min2,&max1,&max2); printf("min1=%d\nmin2=%d\nmax1=%d\nmax2=%d\n",min1,min2,m ax1,max2); return 0; } void max_min(int *a,int m,intn,int *min1,int *min2,int *max1,int *max2){ int lmin1,lmin2,lmax1,lmax2; intrmin1,rmin2,rmax1,rmax2; int mid; if(m==n){ *min1=*min2=*max1=*max2=a[m]; } else if(m==n-1){ if(a[m]<a[n]){ *min1=a[m]; *min2=a[n]; *max1=a[n]; *max2=a[m]; } else { *min1=a[n]; *min2=a[m]; *max1=a[m]; *max2=a[n]; } } else { mid=(m+n)/2;max_min(a,m,mid,&lmin1,&lmin2,&lmax1,&lmax2);max_min(a,mid+1,n,&rmin1,&rmin2,&rmax1,&rmax2);if(lmin1<rmin1){ if(lmin2<rmin1){ *min1=lmin1; *min2=lmin2; } else { *min1=lmin1;*min2=rmin1; } } else if(rmin2<lmin1){ *min1=rmin1; *min2=rmin2; } else { *min1=rmin1;*min2=lmin1; } if(lmax1>rmax1){ if(lmax2>rmax1){ *max1=lmax1; *max2=lmax2; } else { *max1=lmax1;*max2=rmax1; } } else if(rmax2>lmax1){ *max1=rmax1; *max2=rmax2; } else { *max1=rmax1;*max2=lmax1; } } }10、#include<stdio、h> int add(int *a,int flag,int right); int main(void){ int a[10]={1,2,3,4,5,6,7,8,9,10}; intsum=add(a,0,9); printf("%d\n",sum); return 0; } intadd(int *a,int flag,int right){ int mid; if(flag==right){ return a[flag]; } else if(flag==right-1){ return a[flag]+a[right]; } else{ mid=(flag+right)/2; returnadd(a,flag,mid)+add(a,mid+1,right); } }11、#include<stdio、h>int main(void){int a[5][3]={{-50,17,-42},{-47,-19,-3},{36,-34,-43},{-30,-43,34},{-23,-8,-45}};int i,j;int max,n;intsum=0;for(i=0;i<5;i++){max=a[i][0];n=0;for(j=1;j<3;j++){i f(a[i][j]>max){max=a[i][j];n=j;}}sum+=max;printf("a[%d][%d]=%d\n",i,n,max);}printf("%d\n",sum);return 0;}12、/* * File: newmain、c* Author: nirnava** Created on全文结束》》年4月22日, 下午5:21*/#include<stdio、h>#include<stdlib、h>#define N4void matrix_mul(int*mul1,int *mul2,int *mul3,int length);voidmatrix_add_sub(int * A,int * B,int * C,int m,charch);void update_half_value(int * A,int * B,int m);void get_half_value(int * A,int * B,int m);int main(void){int i,j;int mul1[N*N]={1,2,3,4,5,6,7,8,9,10,1,2,3,4,5,6};intmul2[N*N]={7,8,9,10,1,2,3,4,5,6,7,8,9,10,1,2};intmul3[N*N];matrix_mul(mul1,mul2,mul3,N);for(i=0;i<N*N;i++) {printf("%5d",mul3[i]);if((i+1)%N==0)printf("\n");}return 0;}void matrix_add_sub(int * A,int * B,int * C,int m,char ch){inti;for(i=0;i<m*m;i++){if(ch==+)C[i]=A[i]+B[i];elseC[i]=A[i ]-B[i];}}void update_half_value(int * A,int * B,intm){inti,j;for(i=0;i<m/2;i++){for(j=0;j<m/2;j++){B[i*m+j]=A[i*m/ 2+j];}}}void get_half_value(int * A,int * B,int m){inti,j;for(i=0;i<m/2;i++){for(j=0;j<m/2;j++){A[i*m/2+j]=B[i* m+j];}}}void matrix_mul(int *A,int *B,int *C,intm){if(m==2){int D,E,F,G,H,I,J;D=A[0]*(B[1]-B[3]);E=A[3]*(B[2]-B[0]);F=(A[2]+A[3])*B[0];G=(A[0]+A[1])*B[3];H=(A[2]-A[0])*(B[0]+B[1]);I=(A[1]-A[3])*(B[2]+B[3]);J=(A[0]+A[3])*(B[0]+B[3]);C[0]=E+I+J-G;C[1]=D+G;C[2]=E+F;C[3]=D+H+J-F;return ;}else{intA1[m*m/4],A2[m*m/4],A3[m*m/4],A4[m*m/4];intB1[m*m/4],B2[m*m/4],B3[m*m/4],B4[m*m/4];intC1[m*m/4],C2[m*m/4],C3[m*m/4],C4[m*m/4];intD[m*m/4],E[m*m/4],F[m*m/4],G[m*m/4],H[m*m/4],I[m*m/4],J[m*m/4];inttemp1[m*m/4],temp2[m*m/4];get_half_value(A1,&A[0],m);get_ half_value(A2,&A[m/2],m);get_half_value(A3,&A[m*m/2],m);g et_half_value(A4,&A[m*m/2+m/2],m);get_half_value(B1,&B[0] ,m);get_half_value(B2,&B[m/2],m);get_half_value(B3,&B[m*m /2],m);get_half_value(B4,&B[m*m/2+m/2],m);matrix_add_sub( B2,B4,temp1,m/2,-);matrix_mul(A1,temp1,D,m/2);matrix_add_sub(B3,B1,temp1,m /2,-);matrix_mul(A4,temp1,E,m/2);matrix_add_sub(A3,A4,temp1,m /2,+);matrix_mul(temp1,B1,F,m/2);matrix_add_sub(A1,A2,tem p1,m/2,+);matrix_mul(temp1,B4,G,m/2);matrix_add_sub(A3,A1 ,temp1,m/2,-);matrix_add_sub(B1,B2,temp2,m/2,+);matrix_mul(temp1,temp 2,H,m/2);matrix_add_sub(A2,A4,temp1,m/2,-);matrix_add_sub(B3,B4,temp2,m/2,+);matrix_mul(temp1,temp 2,I,m/2);matrix_add_sub(A1,A4,temp1,m/2,+);matrix_add_sub (B1,B4,temp2,m/2,+);matrix_mul(temp1,temp2,J,m/2);matrix_ add_sub(E,I,temp1,m/2,+);matrix_add_sub(J,G,temp2,m/2,-);matrix_add_sub(temp1,temp2,C1,m/2,+);matrix_add_sub(D,G ,C2,m/2,+);matrix_add_sub(E,F,C3,m/2,+);matrix_add_sub(D, H,temp1,m/2,+);matrix_add_sub(J,F,temp2,m/2,-);matrix_add_sub(temp1,temp2,C4,m/2,+);update_half_value( C1,&C[0],m);update_half_value(C2,&C[m/2],m);update_half_v alue(C3,&C[m*m/2],m);update_half_value(C4,&C[m*m/2+m/2],m );return ;}}13、#include<stdio、h>int main(void){inta[6][7]={{16,4,3,12,6,0,3},{4,-5,6,7,0,0,2},{6,0,-1,-2,3,6,8},{5,3,4,0,0,-2,7},{-1,7,4,0,7,-5,6},{0,-1,3,4,12,4,2}};int b[6][7],c[6][7];int i,j,k;int max;int flag;inttemp;for(i=0;i<6;i++)for(j=0;j<7;j++){b[i][j]=a[i][j];c[i ][j]=-1;}for(i=1;i<5;i++){for(j=0;j<7;j++){max=0;for(k=j-2;k<=j+2;k++){if(k<0)continue;elseif(k>6)break;else{if(b[i][j]+b[i-1][k]>max){max=b[i][j]+b[i-1][k];flag=k;}}}b[i][j]=max;c[i][j]=flag;}}for(j=1;j<=5;j ++){max=0;for(k=j-2;k<=j+2;k++){if(k<0)continue;elseif(k>6)break;else{if(b[i][j]+b[i-1][k]>max){max=b[i][j]+b[i-1][k];flag=k;}}}b[i][j]=max;c[i][j]=flag;}max=0;for(j=1;j <=5;j++){if(b[i][j]>max){max=b[i][j];flag=j;}}printf("%d\ n",max);temp=c[i][flag];printf("%5d",a[i][temp]);for(j=i; j>0;j--){temp=c[j][temp];printf("%5d",a[j-1][temp]);}printf("\n");return 0;}14、#include<stdio、h>int main(void){intA[6]={0,3,7,9,12,13};int B[6]={0,5,10,11,11,11};intC[6]={0,4,6,11,12,12};int AB[6][6];int temp[6];intabc[6];int max;int flag;inti,j,k;for(i=0;i<=5;i++){max=0;for(j=0;j<=i;j++){AB[i][j]= A[i-j]+B[j];if(AB[i][j]>max)max=AB[i][j];}temp[i]=max;}max=0; for(i=0;i<=5;i++){abc[i]=temp[i]+C[5-i];if(abc[i]>max){max=abc[i];flag=i;}}printf("max=%d\n",m ax);printf("c=%d\n",5-flag);max=max-C[5-flag];for(i=0;i<=flag;i++){if(AB[flag][i]==max){printf("b =%d\n",i);printf("a=%d\n",flag-i);break;}}return 0;}16、#include<stdio、h>#define N100int search(int*a,int left,int right);int sum_buf(int *a,int left,int right);int main(void){int a[N];int i;ints;for(i=0;i<N;i++)a[i]=1;a[24]=2;s=search(a,0,N-1);printf("%d\n",s);return 0;}int sum_buf(int *a,int left,int right){int i;intsum=0;for(i=left;i<=right;i++)sum+=a[i];return sum;}int search(int *a,int left,int right){intmid=(left+right)/2;if(left==right-1){if(a[left]<a[right])return right;elsereturnleft;}if(mid*2!=(right+left-1)){if(sum_buf(a,left,mid-1)>sum_buf(a,mid+1,right)){return search(a,left,mid-1);}elseif(sum_buf(a,left,mid-1)<sum_buf(a,mid+1,right)){returnsearch(a,mid+1,right);}elsereturnmid;}else{if(sum_buf(a,left,mid)>sum_buf(a,mid+1,right))r eturn search(a,left,mid);elsereturnsearch(a,mid+1,right);}}17、#include<stdio、h>intjob[6][2]={{3,8},{12,10},{5,9},{2,6},{9、3},{11,1}};int x[6],bestx[6],f1=0,bestf,f2[7]={0};void try(int i);void swap(int a,int b);int main(void){inti,j;bestf=32767;for(i=0;i<6;i++)x[i]=i;try(0);for(i=0;i<6 ;i++)printf("%d",bestx[i]);printf("\nbestf=%d\n",bestf);return 0;}void try(int i){intj;if(i==6){for(j=0;j<6;j++)bestx[j]=x[j];bestf=f2[i];}els e{for(j=i;j<6;j++){f1=f1+job[x[j]][0];if(f2[i]>f1)f2[i+1] =f2[i]+job[x[j]][1];elsef2[i+1]=f1+job[x[j]][1];if(f2[i+1 ]<bestf){swap(i,j);try(i+1);swap(i,j);}f1=f1-job[x[j]][0];}}}void swap(int i,int j){inttemp;temp=x[i];x[i]=x[j];x[j]=temp;}18、#include<stdio、h>#define N5 //N个数字#define M2 //M个加号char buf[N];int a[N];char b[M+1][N];intc[M+1];int try(int t);void swap(int t1,int t2);intadd();void output();int min=99999;int main(){inti;for(i=0;i<N;i++){scanf("%c",&buf[i]);}a[0]=0;for(i=1;i< =M;i++){a[i]=1;}for(;i<N;i++){a[i]=0;}try(1);output();pri ntf("%d\n",min);return 0;}int try(int t){int j;int i;int sum;if(t>=N){sum=add();if(sum<min){min=sum;for(i=0;i<M+1; i++){c[i]=atoi(b[i]);}}/*for(i=0;i<N;i++){printf("%d",a[i ]);}printf("\n");*/}else{for(j=t;j<N;j++){//if(a[t]!=a[j] ){swap(t,j);try(t+1);swap(t,j);}//else//try(t+1);}}}void swap(int t1,int t2){intt;t=a[t1];a[t1]=a[t2];a[t2]=t;}int add(){int sum=0;inti=0;int j;int k=0;inth=0;for(i=0;i<M+1;i++)for(j=0;j<N;j++)b[i][j]=Q;i=0;j=0;h =0;k=0;for(j=0;j<N;j++){if(a[j]==1){h=0;i++;b[i][h]=buf[j ];//printf("%d ",atoi(b[i]));//printf("%d %d %c\n",i,h,b[i][h]);h++;}else{b[i][h]=buf[j];//printf("%d %d %c \n",i,h,b[i][h]);//printf("%d",atoi(b[i]));h++;}}/*for(i=0;i<M+1;i++){for(j=0;j<N;j++) printf("%c",b[i][j]);printf("\n");}*/for(i=0;i<M+1;i++){sum+=atoi(b[i]);}return sum;}void output(){inti;for(i=0;i<M+1;i++){printf("%d",atoi(b[i]));if(i!=M)printf("+");}printf("=");}19、#include<stdio、h>int main(void){int buf[100];int m,n;inti,j;buf[0]=1;buf[1]=1;scanf("%d%d",&n,&m);for(i=1;i<n;i++){buf[i+1]=buf[i];for(j=i;j>0;j--){buf[j]=buf[j]+buf[j-1];}}printf("%d\n",buf[m]);return 0;}20、#include<stdio、h> int max_sum4(int *a,int n);int max_sub_sum(int *a,int left,int right); int main(void) { int a[6]={-2,11,-4,13,-5,-2};printf("%d\n",max_sum4(a,5)); return 0; } intmax_sum4(int *a,int n){ return max_sub_sum(a,0,n); } int max_sub_sum(int*a,int left,int right){ intcenter,i,max,left_sum,right_sum,s1,s2,s3,s4,lefts,rights, leftl,rightl; int buf[4]; if(left==right)return a[left]; else { center=(left+right)/2;left_sum=max_sub_sum(a,left,center);right_sum=max_sub_sum(a,center+1,right); s1=0; lefts=0;for(i=center;i>=left;i--){ lefts+=a[i]; if(lefts>s1)s1=lefts; } s2=0; rights=0;for(i=center+1;i<=right;i++){ rights+=a[i]; if(rights>s2)s2=rights; } s3=0; leftl=0; for(i=left;i<=center;i++) { leftl+=a[i]; if(leftl>s3)s3=leftl; } s4=0; rightl=0;for(i=right;i>=center+1;i--){ rightl+=a[i]; if(rightl>s4)s4=rightl; } buf[0]=s1+s2; buf[1]=s4+s3;buf[2]=left_sum; buf[3]=right_sum; max=0;for(i=0;i<=3;i++){ if(buf[i]>max)max=buf[i]; } return max; } }。
《计算机算法设计与分析》习题及答案
《计算机算法设计与分析》习题及答案一.选择题1、二分搜索算法是利用( A )实现的算法。
A、分治策略B、动态规划法C、贪心法D、回溯法2、下列不是动态规划算法基本步骤的是( A )。
A、找出最优解的性质B、构造最优解C、算出最优解D、定义最优解3、最大效益优先是( A )的一搜索方式。
A、分支界限法B、动态规划法C、贪心法D、回溯法4. 回溯法解旅行售货员问题时的解空间树是( A )。
A、子集树B、排列树C、深度优先生成树D、广度优先生成树5.下列算法中通常以自底向上的方式求解最优解的是( B )。
A、备忘录法B、动态规划法C、贪心法D、回溯法6、衡量一个算法好坏的标准是( C )。
A 运行速度快B 占用空间少C 时间复杂度低D 代码短7、以下不可以使用分治法求解的是( D )。
A 棋盘覆盖问题B 选择问题C 归并排序D 0/1背包问题8. 实现循环赛日程表利用的算法是( A )。
A、分治策略B、动态规划法C、贪心法D、回溯法9.下面不是分支界限法搜索方式的是( D )。
A、广度优先B、最小耗费优先C、最大效益优先D、深度优先10.下列算法中通常以深度优先方式系统搜索问题解的是( D )。
A、备忘录法B、动态规划法C、贪心法D、回溯法11.备忘录方法是那种算法的变形。
( B )A、分治法B、动态规划法C、贪心法D、回溯法12.哈夫曼编码的贪心算法所需的计算时间为( B )。
A、O(n2n)B、O(nlogn)C、O(2n)D、O(n)13.分支限界法解最大团问题时,活结点表的组织形式是( B )。
A、最小堆B、最大堆C、栈D、数组14.最长公共子序列算法利用的算法是( B )。
A、分支界限法B、动态规划法C、贪心法D、回溯法15.实现棋盘覆盖算法利用的算法是( A )。
A、分治法B、动态规划法C、贪心法D、回溯法16.下面是贪心算法的基本要素的是( C )。
A、重叠子问题B、构造最优解C、贪心选择性质D、定义最优解17.回溯法的效率不依赖于下列哪些因素( D )A.满足显约束的值的个数B. 计算约束函数的时间C.计算限界函数的时间D. 确定解空间的时间18.下面哪种函数是回溯法中为避免无效搜索采取的策略( B )A.递归函数 B.剪枝函数 C。
大学_计算机算法设计与分析第4版(王晓东著)课后答案下载

计算机算法设计与分析第4版(王晓东著)课后答
案下载
计算机算法设计与分析第4版内容简介
第1章算法概述
1.1 算法与程序
1.2 算法复杂性分析
1.3 NP完全性理论
算法分析题1
算法实现题1
第2章递归与分治策略
2.1 递归的概念
2.2 分治法的基本思想
2.3 二分搜索技术
2.4 大整数的乘法
2.5 Strassen矩阵乘法
2.6 棋盘覆盖
2.7 合并排序
2.8 快速排序
2.9 线性时间选择
2.10 最接近点对问题
第3章动态规划
第4章贪心算法
第5章回溯法
第6章分支限界法
第7章随机化算法
第8章线性规划与网络流
附录A C++概要
参考文献
计算机算法设计与分析第4版目录
本书是普通高等教育“十一五”__规划教材和国家精品课程教材。
全书以算法设计策略为知识单元,系统介绍计算机算法的设计方法与分析技巧。
主要内容包括:算法概述、递归与分治策略、动态规划、贪心算法、回溯法、分支限界法、__化算法、线性规划与网络流等。
书中既涉及经典与实用算法及实例分析,又包括算法热点领域追踪。
为突出教材的`可读性和可用性,章首增加了学习要点提示,章末配有难易适度的算法分析题和算法实现题;配套出版了《计算机算法设计与分析习题解答(第2版)》;并免费提供电子课件和教学服务。
中科院计算机算法设计与分析各章作业+历年习题
5.下面那些规则是正确的?为什么? 1). f (n) O( F (n)), g (n) O(G(n)) f (n) / g (n) O( F (n) / G(n)) ;错 2). f (n) O( F (n)), g (n) O(G(n)) f (n) / g (n) ( F (n) / G(n)) ;错 3). f (n) O( F (n)), g (n) O(G(n)) f (n) / g (n) ( F (n) / G(n)) ;错 4). f (n) ( F (n)), g (n) (G(n)) f (n) / g (n) ( F (n) / G(n)) ;错 5). f (n) ( F (n)), g (n) (G(n)) f (n) / g (n) ( F (n) / G(n)) 。错 6).
7
对顶点个数进行归纳。 当顶点数|v(D)|=2 时,因为每个点的入度和出度相等,易得构成有向 Euler 环游。 假设顶点数|v(D)|=k 时结论成立,则 当顶点数|v(D)|=k + 1 时,任取 v∈v(D).设 S={以 v 为终点的边},K={以 v 为始点的边},因为 v 的入度和出度相等,故 S 和 K 中边数相等。记 G=D-v.对 G 做如下操作: 任取 S 和 K 中各一条边 e1、e2 ,设在 D 中 e1 v1v , e2 vv2 ,则对 G 和 S 做如下操作 G G v1v2 , S S {e2} ,重复此步骤直到 S 为空。这个过程最终 得到的 G 有 k 个顶点,且每个顶点的度与在 G 中完全一样。由归纳假设,G 中 存在有向 Euler 环游,设为 C。在 G 中从任一点出发沿 C 的对应边前行,每当遇 到上述添加边 v1v2 时, 都用对应的两条边 e1, e2 代替, 这样可以获得有向 Euler 环游。 3)G 是至少有三个顶点的无向图,则 G 包含 Euler 环游等价于 G 中无奇度顶 点。 (即任意顶点的度为偶数) 。 3. 设 G 是具有 n 个顶点和 m 条边的无向图, 如果 G 是连通的, 而且满足 m = n-1, 证明 G 是树。
算法设计与分析课件--贪心法-最小生成树问题

6
4.5 最小生成树问题
◼ Prim算法思想:
❖Prim算法利用了最小生成树的上述性质。 ❖ 算法的关键是如何找出连接U和V-U所有边中的权值 最小的边(u, v),并将v加入到U中。循环执行上述操作, 直至U=V为止。
7
4.5 最小生成树问题
◼ Prim算法设计:
❖ 设G=(V,E)是具有n个结点的无向连通带权图;设最 小生成树T=(U,TE),算法结束时U=V,TE包含于E
点的无向连通带权图,U是
V的一个非空子集。最小生
成树的一个很重要的性质:
✓ (u, v)是一条具有最小权 值 的 边 , 其 中 u∈U , v∈V-U,则必存在一棵包
假设最小生成树T不包括(u,v)。 将(u,v)添加到T上产生回路, 将回路中另外一条边(u’,v’)去 掉得到另外一个树T’
含 边 (u , v) 的 最 小 生 成 树 。
◼ Prim算法的求解示例:
18
4.5 最小生成树问题
◼ Prim算法的求解示例:
19
4.5 最小生成树问题
◼ Prim算法的求解示例:
20
4.5 最小生成树问题
◼ Prim算法的求解示例:
21
4.5 最小生成树问题
◼ Prim算法的求解示例:
22
4.5 最小生成树问题
◼ Prim算法的求解示例:
◼ Prim算法空间复杂性:
❖定义了辅助变量Q,其占用空间为|V|,从而空间复 杂度为O(|V|)。
27
4.5 最小生成树问题
◼ Prim算法的正确性证明:
❖最优子结构性质:假设最小生成树为T,从V-U集合中 添加到集合U中的结点顺序为< u0, …, ui, …, un-1, un>, 需要证明: 顺序< u0, …, ui, …, un-1>亦为图G’=(V\{un}, E\{e})最小生成树T’ ,其中e={原图G中与结点un相连 的边}。
马丙鹏_计算机算法设计与分析_第四章_1

17
4.2 背包问题
1. 问题的描述
– 问题的形式描述 可行解: 满足上述约束条件的任一集合(x1,x2,…,xn) 都是 问题的一个可行解——可行解可能为多个。 (x1,x2,…,xn)称为问题的一个解向量。 最优解: 能够使目标函数取最大值的可行解是问题的最 优解——最优解也可能为多个。
20
20
4.2 背包问题
2. 贪心策略求解
– (1) 以目标函数作为度量标准 如:若ΔM=2,背包外还剩两件物品i,j,且有(pi= 4,wi=4) 和(pj=3,wj=2),则下一步应选择j而非i 放入背包:pi/2 = 2 < pj= 3 实例分析(例4.1) (p1,p2,p3) = (25,24,15), (w1,w2,w3) = (18,15,10) ∵ p1>p2> p3 ∴ 首先将物品1放入背包,此时x1=1,背包获得p1=25的效 益增量,同时背包容量减少w1=18个单位,剩余空间ΔM=2。 其次考虑物品2和3。就ΔM=2而言有,只能选择物品2或3 的一部分装入背包。
3. 贪心方法的一般策略
– 贪心方法
A(1) A(2) … A(n)
量度标准1
A1(1) … A1(n)
量度标准2
A2(1) … A2(n)
……
量度标准k
Ak(1) … Ak(n)
可行解1 次优解
可行解2 最优解
可行解k 次优解
12
12
4.1 一般方法
按照度量标准,从A中选择一个输 procedure GREEDY(A,n) 入,其值赋予x,并将之从A中删除 //A(1:n)包含n个输入// solution←Φ //将解向量solution初始化为空// for i←1 to n do 判断x是否可以包含在解向量中 x←SELECT(A) if FEASIBLE(solution, x) then solution←UNION(solution, x) endif repeat return (solution) 将x和当前的解向量合并成新 end GREEDY 的解向量,并修改目标函数
(陈慧南 第3版)算法设计与分析——第4章课后习题答案
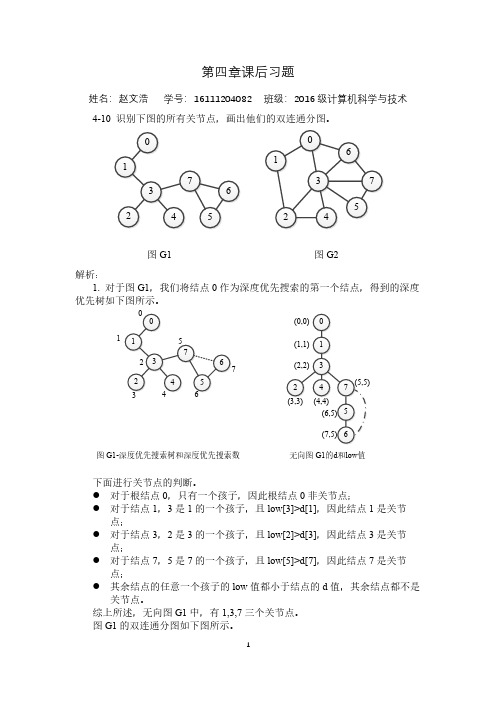
点; 其余结点的任意一个孩子的 low 值都小于结点的 d 值,其余结点都不是
关节点。 综上所述,无向图 G1 中,有 1,3,7 三个关节点。 图 G1 的双连通分图如下图所示。
1
7
0
6
3
1 2
1
的一个孩子且low3d1因此结点1是关节的一个孩子且low2d3因此结点3是关节的一个孩子且low5d7因此结点7是关节其余结点的任意一个孩子的low值都小于结点的d值其余结点都不是关节点
第四章课后习题
姓名:赵文浩 学号:16111204082 班级:2016 级计算机科学与技术 4-10 识别下图的所有关节点,画出他们的双连通分图。
3
5
7 3
3
4
图 G1的双连通分图
2. 对于图 G2,我们仍将结点 0 作为深度优先搜索的第一个结点,得到的深 度优先树如下图所示。
(0,0) 0
11
0 0
33
5 6
6 7
22
57 4 4
(1,0) 1
(2,0) 2
(3,0) 3
(4,2) 4
6 (5,0)
7 (6,3)
5 (7,3)
图 G2-深度优先搜索树和深度优先搜索数
无向图 G2的d和low值
下面进行关节点判断。 无向图 G2 的所有结点的任意一个孩子的 low 值都小于结点的 d 值,因此无 向图 G2 中不存在关节点。因此,该无向图的双连通图即为它本身,如下图所 示。
0 6
1
3
7
5
2
4
图 G2的双连通分图
计算机算法设计与分析(王晓东第4版)第4章
23
最优解代价公式
c[i, j ]: Sij 最优解的大小 c[i, j ] = 0 if Sij = φ maxak ∈Sij {c[i, k ] + c[k, j ] + 1} if Sij = φ
School of Computer and Communication Engineer
24
活动选择问题动态规划方法
schoolcommunicationengineer一步一步构建问题的最优解决方案其中每一步只考虑眼前的最佳选择对解空间进行搜索时在局部范围内进行择优选取决定下一步搜索方向不是为了找到全部解而只是找出一种可行解在一定的情况下贪心算法找出的可行解将是最优解schoolcommunicationengineer42贪贪贪心心心算算算法法法基基基本本本要要要素素素算法包含一系列步骤每一步都有一组选择做出在当前看来最好的选择一个贪心算法是否产生最优解需要严格证明schoolcommunicationengineer最优子结构schoolcommunicationengineer贪贪贪心心心选选选择择择性性性质质质定定定义义义若若若一个优化问题的全局最优解可以通过局部最优选择得到则该问题称为具有贪贪贪心心心选选选择择择性性性
School of Computer and Communication Engineer 4
4.2 贪 心 算 法 基 本 要 素
• 算法包含一系列步骤, 每一步都有一组选择, 做出在 当前看来最好的选择 • 希望通过作出局部最优选择达到全局最优选择 • 一个贪心算法是否产生最优解, 需要严格证明
School of Computer and Communication Engineer
计算机算法设计与分析第4版
算法(Algorithm)
现代谜题
有4个人打算过桥,它们都在桥的某一端。我们有17分 钟让他们全部到达大桥的另一头。时间是晚上,他们 只有一只手电筒。最多只能有两个人同时过桥,而且 必须携带手电筒。必须步行将手电筒带来带去,不能 扔来扔去。每个人走路的速度是不同的:甲过桥需要1 分钟,乙要2分钟,丙要5分钟,丁要10分钟。两个人 一起走的速度等于其中较慢的人的速度。请给出过桥 的方案。
算法设计与分析的步骤
算法理论正确,但设计出的算法并不正确
例1:已知A=1012 B=-1012 C=1,计算A+B+C的值
计算方法有两个:A+B+C=1
A+C+B=0
出现上述情况原因:使用工具只能表示七位,即计算机的 精度问题
算法设计与分析的步骤
例2:求解方程x2-(1015+1)*x+1015=0的根
4.
简单性
含义:算法简单,程序结构简单。 好处:
容易验证正确性 便于程序调试
简单的算法效率不一定高。要在保证一定效率的 前提下力求得到简单的算法。
分析算法的基本原则
5. 最优性
含义:指求解某类问题中效率最高的算法 两种最优性(设A是解某个问题的算法)
最坏情况:如果在解这个问题的算法类中没有其它算法在最 坏情况下的时间复杂性比A在最坏情况下的时间复杂性低, 则称A是解这个问题在最坏情况下的最优算法。 平均情况:如果在解这个问题的算法类中没有其它算法在平 均情况下的时间复杂性比A在平均情况下的时间复杂性低, 则称A是解这个问题在平均情况下的最优算法。
算法设计与分析的步骤
3.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
17
4.1 一般方法
3. 最优性原理(Principle of Optimality)
– 最优性原理对0/1背包问题成立: 设y1, y2, …, yn是x1, x2, …, xn的0/1值最优序列。 初始状态: KNAP(1, n, M) 初始决策: 决定y1等于1还是等于0, 若y1=0, KNAP(2, n, M)是初始决策产生的状态。则y2, …, yn相对于KNAP(2, n, M)将构成一个最优序列。否则,y1, y2, …, yn将不是KNAP(1, n, M)的最优解 若y1=1, KNAP(2, n, M-w1)是初始决策产生的状态。则 y2, …, yn相对于KNAP(2, n, M-w1)将构成一个最优序列。
4
4.1 一般方法
1. 多阶段决策问题
– 最优化问题: 问题的每一阶段可能有多种可供选择的决策,每 一决策都附有一定的“成本”。各阶段的决策构 成一个决策序列。决策序列的成本是序列中所有 决策的成本之和。决策序列不同,所导致的问题 的结果可能不同。 设从阶段i到阶段i+1有pi种不同的选择,则从阶段 1至阶段n共有p1p2……pn种不同的路径(每条路径 对应一个决策序列)。 问:这些路径里面,哪一条的成本最小? ——如何求取最优决策序列?
V1
云图
V2
云图
...
云图
VN
3
4.1 一般方法
1. 多阶段决策问题
– 多阶段决策过程: 假设事件在初始状态后需要经过n个这样的阶段。 从i阶段发展到i+1阶段(0≤i<n)可能有多种不同的途 径,而事件必须从中选择一条途径往前进展。 在两个阶段间选择发展途径的行为称为一次“决 策”。事件的发展过程之中需要做n次“决策”, 这些“决策”就构成了事件整个发展过程阶段i以后的行为仅依赖于i阶段的状 态,而与i阶段之前,过程如何达到这种状态的方 式无关。
第四章 动态规划
1
2014-10-23
第四章 动态规划
4.1 一般方法 4.2 多段图问题 4.3 每对结点之间的最短路径 4.4 最优二分检索树 4.5 0/1背包问题 4.6 可靠性设计 4.7 货郎担问题
2
4.1 一般方法
1. 多阶段决策问题
– 多阶段决策过程: 事件的发展过程分为若干个相互联系的阶段。事 件的发展总是初始状态开始,依次经过第一阶段、 第二阶段、第三阶段、…,直至最后一个阶段结 束。
11
4.1 一般方法
3. 最优性原理(Principle of Optimality)
– 利用动态规划求解问题的前提 ① 证明问题满足最优性原理 如果对所求解问题证明满足最优性原理,则说明用 动态规划方法有可能解决该问题 所谓“问题满足最优性原理”即:问题的最优决策 序列具有最优性原理所阐述的性质。 ② 获得问题状态的递推关系式 获得各阶段间的递推关系式是解决问题的关键。 f(x1,x2,…,xi)→xi+1 向后递推或 f(xi,xi+1,…,xn)→xi-1 向前递推
25
4.1 一般方法
5. 递推策略
例4.4 利用向前处理法求解k段图问题 设 ������������,������������ ∈V2,1≤j2≤p2,|V2|=p2; ������������������,������ 是由������������,������������ 到t的最短路径,则s到t的最短路径是
18
4.1 一般方法
3. 最优性原理(Principle of Optimality)
– 最优性原理对0/1背包问题成立: 否则,设存在另一0/1序列z1, z2, …, zn,使得
2i n
pi zi
2i n
p y且
i i
2i n
w z
i i
M w1
则序列y1, z2, …, zn将是一个对于KNAP(1,n,M)具有更大 效益值的序列。与假设矛盾。 故,最优性原理成立。
5. 递推策略
– 向前处理法 列出根据xi+1,…,xn的最优决策序列求取xi决策值的 关系式。 从最后一个阶段,逐步向前递推求出各阶段的决 策值。先给出xn的决策,然后根据xn求xn-1,再根 据xn,xn-1求xn-2,…。决策序列x1,x2,…,xn就是问 题的最优解
xn-1,1 … xn-1,pn-1 向前递推 xn
������
{s ������������������,������ | ������������,������������ ∈V2,1≤j2≤p2}中最短的那条路径。
16
4.1 一般方法
3. 最优性原理(Principle of Optimality)
– 例4.2[0/1背包问题] KNAP(1, j, X) 目标函数:
1i j
px
i i
i i
约束条件:
1i j
w x
X
xi 0或1, pi 0, wi 0,1 i j
0/1背包问题:KNAP(1, n, M)
5
4.1 一般方法
1. 多阶段决策问题
– 多阶段决策的最优化问题 求能够获得问题最优解的决策序列——最优决策 序列。 可行解:从问题开始阶段到最后阶段的一个合理 的决策序列都是问题的一个可行解。 目标函数:用来衡量可行解优劣的标准,通常以 函数形式给出。 最优解:能够使目标函数取极值的可行解。
S2
……
x3 xi
Si
……
xi+1 xn
Sn
其余的决策 初始决策 相对于S1构成一个最优决策序列
9
4.1 一般方法
3. 最优性原理(Principle of Optimality)
– 过程的最优决策序列具有如下性质:如果整个序列是 最优决策序列,则该序列中的任何一段子序列将是相 对于该子序列所代表的子问题的最优决策子序列。
S0 至Si的子问题 S0 S1 S2 Si 至Sn的子问题 Si
……
x3 xi
……
xi+1 Si至Sn的决策 xn
x1
x2
Sn
S0至Si的决策 S0 至Si子问题的一个最优决策序列
延伸:若 全局是最 优的,则 局部亦是 最优的
Si 至Sn子问题的一个最优决策序列
10
4.1 一般方法
3. 最优性原理(Principle of Optimality)
13
段是不相交 的结点子集
V1 V2
2
V3
V4
V5
4
2
6
9 7
1 3
6
5
9
4 2
10 12
7
4
2
7
4
3 2
3
5
11
11
1
8
5
源点
5
6
11
8
边连接在相邻的两段之间 5段图
4.1 一般方法
3. 最优性原理(Principle of Optimality)
– 多段图问题的多阶段决策过程: 生成从s到t的最小成本路径是在k-2个阶段(除s和t 外)进行某种决策的过程:从s开始,第i次决策决 定Vi+1(1≤i≤k-2)中的哪个结点在从s到t的最短路径 上。
rk,1
0
s0 s1 s2
Γk,1
. Γk,2 . .
rk,2
Sk
Sn+1
k
sk-1
rk,j
k
Γk,j
r1
r2
rk-1
rk,p
k
Γk,p
k
x1
x2
xk-1
xk
k 1 OPT {rk , jk k , jk } rk k
1 jk pk
0 r1r2 L rk k
4.1 一般方法
12
4.1 一般方法
例4.1 [多段图问题]多段图G=(V, E)是一个有向图,且具有特性: 结点:结点集V被分成k≥2个不相交的集合Vi,1≤i≤k,其中 V1和Vk分别只有一个结点s(源点)和t(汇点)。 段:每一子集合Vi定义图中的一段——共k段。 边:所有的边(u, v)均具有如下性质: 若<u, v>∈E,则该边 将是从某段i指向i+1段,即若u∈Vi,则v∈Vi+1, 1≤i≤k-1。 成本:每条边(u, v)均附有成本c(u, v)。 s到t的路径:从第1段开始,至第2段、第3段、…、最后在第 k段终止。路径的成本是这条路径上边的成本和。 多段图问题:求由s到t的最小成本路径。
– 例:最短路径的性质 若v1v2v3……vn是从节点v1到节点vn的最短路径。则: v2v3……vn是从v2到vn的最短子路径; v3……vn是从v3到vn的最短子路径; …… 推广: 对v1v2v3……vn中的任意一段子序列: vpvp+1……vq(p≤q,1≤p,q≤n),均代表从vp至vq的最短子路径。
1 j1 p1
1 1
x1
r1,1
. . .
Γ1,1
r1,2 s0 r1,j r1,p
1
Γ1,2
Γ1,j
S1
Sn+1
1
1
Γ1,p
1
0 OPT {r1, j1 1, j1 } r11
1 j1 p1
4.1 一般方法
4. 动态规划模型的基本要素
– 最优决策序列的表示 若已经做了k-1次决策,1≤k-1<n,设x1,x2,…,xk-1 的最优决策值是r1,r2,…,rk-1,所产生的状态依次为 S1,S2,…,Sk-1。 xk是基于Sk-1的决策。 设Xk={rk,1,rk,2,…,rk,pk}是xk可能的决策值的集合, Sk,jk是在选择决策值rk,jk之后所产生的状态, 1≤jk≤pk。