基于NURBS表达的船舶静水力特性精确计算
基于Matlab的船舶静水力曲线的计算与绘制
端木玉 , 周 克 , 吴 飞宇
( 江 苏海事职 业技 术 学院 , 江 苏 南京 2 1 2 0 0 )
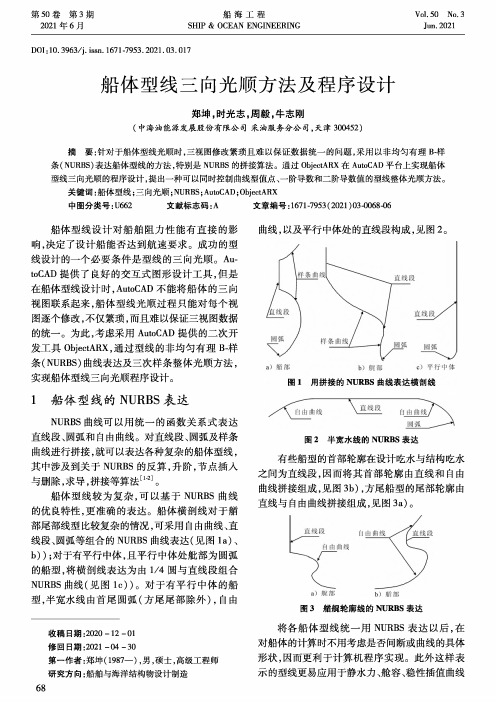
摘要 : 文章介绍 了一种基于 M a t l a b的船舶静水力曲线的计算方法 , 程序可以 自 动读取船舶的型值表 实 现静水力曲线的计算和绘制。以某实船为例 , 精确计算船舶各静水力曲线参数并对结果进行分析。
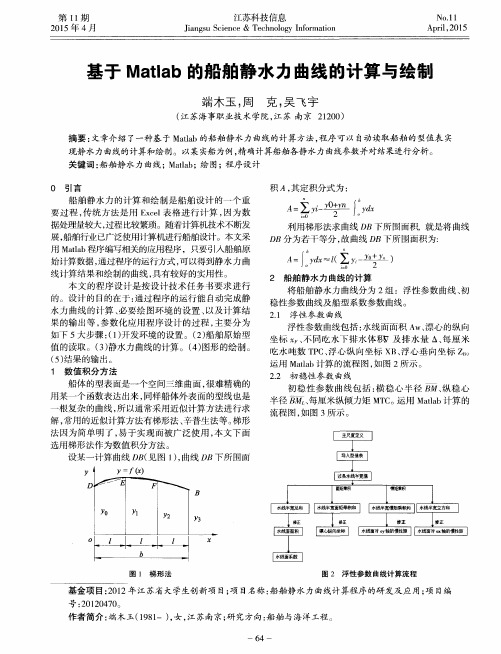
图 1 梯 形法
图 2 浮 性参 数 曲线 计 算 流 程
基金项 目: 2 0 1 2 年江苏省大学生创新项 目; 项 目名称 : 船舶静水力曲线计算程序的研发及应用; 项 目编
号: 2 0 1 2 0 4 7 0 。
作者 简 介 : 端木 玉( 1 9 8 1 一) , 女, 江 苏南京 ; 研 究方 向 : 船舶 与 海洋 工程 。
关键 词 : 船 舶静 水 力 曲线 ; Ma t l a b ; 绘 图; 程序 设 计
0 引言
积 A, 其 定 积分式 为 :
^
船 舶静 水 力 的计 算 和 绘制 是 船 舶设 计 的一个 重
^
要过程 , 传统方法是用 E x c e l 表格进行计算 , 因为数 据处理量较大 , 过程 比较繁琐 。随着计算机技术不 断发 展, 船舶行业 已广泛使 用计算机进行船舶设计 。本 文采 用 Ma t l a b 程 序编写相关的应用程序 ,只要 引入船舶 原 始 计算数 据 , 通过程序 的运行方式 , 可 以得到静 水 力 曲 线计 算结 果 和绘制 的 曲线 , 具 有较好 的实用性 。 本文的程序设计是按设计技术任务 书要求进行 的 。设 计 的 目的在 于 : 通 过程 序 的运 行 能 自动完 成静 水力 曲线 的计 算 、 必 要 绘 图环 境 的设 置 、 以及 计 算结 果 的输 出等 , 参数 化 应 用程 序 设计 的过 程 , 主 要 分 为
浙江海洋学院船舶静水力性能及稳性计算资料

★:第一部分内容大部分学生完成,第二部分内容指定学生完成。
班10,2班12
容
、静水力性能计算。依据提供的船型图纸资料,完成以下设计任务:
型排水体积曲线
排水量曲线
浮心纵向坐标x
曲线
浮心垂向坐标z
(或KB)曲线
水线面面积Aw曲线
漂心纵向坐标x
曲线
每厘米吃水吨数TPC曲线
5 摘要 静水力图全面表达了船舶在静止正浮状态下浮性和稳性要素随吃水而变化的规律。静、动稳性曲线是为了反映船舶在大倾角的状态下受到的力矩,以及倾斜力矩所做的功。这两张图反映了船舶的性能以及安全性,是非常重要的两张图。 关键词: 静水力图、曲线
6 目录:(参考) 一、封面………………………………………………………………………………………………1 二、浙江海洋学院课程设计成绩评定表………………………………………………………………2 三、任务书………………………………………………………………………………………………3 四、摘要………………………………………………………………………………………………5 五、目录……………………………………………………………………………………………6 六、正文 (一)静水力计算 1、船型、主尺度及计算方法…………………………………………………………………7 2、计算列表汇总………………………………………………………………………………7 3、曲线绘制……………………………………………………………………………………8 (二)稳性校核 1、船型、主尺度及计算方法…………………………………………………………………9 2、剖面定位及计算列表汇总…………………………………………………………………………9 3、稳性横截曲线………………………………………………………………………………………10 4、静稳性曲线…………………………………………………………………………………………10 5、动稳性曲线………………………………………………………………………………………………11 (三)设计总结分析……………………………………………………………………………………12 (四)参考文献………………………………………………………………………………………………13
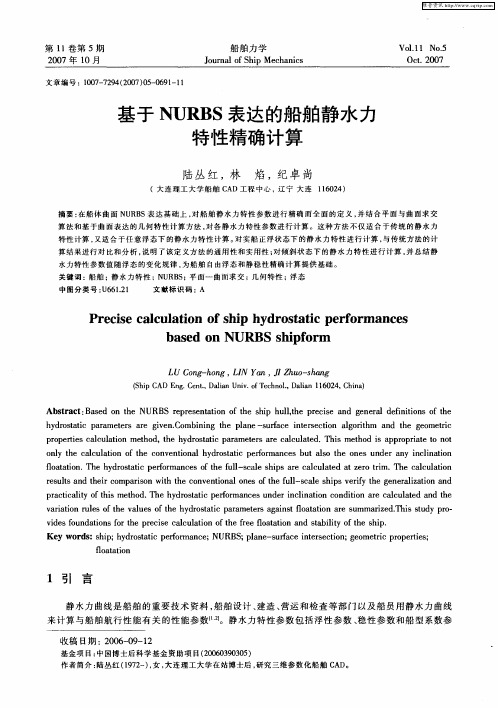
船体型线三向光顺方法及程序设计
线(NURBS曲线)形成一条三次样条,对该三次样 条进行光顺,最后将得到的三次样条曲线的型值 点作为新的半宽水线的型值点,反算得到光顺后
的半宽水线(NURBS曲线)的控制顶点,进而实现 对半宽水线的光顺。
采用单目标非线性约束优化的方法对三次样 条做优化计算。将曲线的横坐标作为已知量,以 各型值点的纵坐标和一阶导数为自由变量,以能 量为目标函数,约束条件分为两部分,第一部分为 固定约束,使得得到的纵坐标与一阶导数值之间 满足三弯矩方程,另一部分为可变约束,用于控制 曲线的型值点,一阶导数,二阶导数的值。
2(HK)0WL [”.......... '
耳空型线
18 ____________________ ■另■金并 ■丸
i^noown
15(KX> wi U(KM>WI
lKKIOWl
l?(KM) WI
11
\\ 1
IQ(XX) WI
9<M)(> WI
it
熬:2二M:話始叫讣律四彳 I 邢 I"
2() 0(10 WL 19 0WW.L
S"(牝)=_ *叫-瓦mg +评(九 + i -九) (6)
根据式(6),在约束矩阵R中添加一行,并将
第该行的第2k,2k + l,2k+2,2k+3个元素设为
4
6
0 ,页,同时把向量〃的与该约束对
应的元素设为C,修改等式约束个数,即可使生成
2021 年 第3期
郑坤,等:船体型线三向光顺方法及程序设计
3.2目标函数的建立 将三次样条看成梁,因弯曲而产生的内力为
Em 二 j-(EI)2fK2ds
⑴
式中:EI为梁的刚度系数;K为曲率。 一般认为,梁的弯曲内力越小,样条越光
基于NURBS表达的船舶静水力特性精确计算
Vo _ No5 l11 . Oc .2 0 t 07
基 于 N R S表达的船舶静水 力 U B 特性精确计算
陆丛红 , 林 焰 , 卓 尚 纪
(大 连 理 工 大 学 船 舶 C D工 程 中 心 , 宁 大 连 1 6 2 ) A 辽 10 4
摘 要 : 船 体 曲 面 NU B 在 R S表 达 基 础 上 , 船 舶 静 水 力特 性 参 数 进 行 精 确 而 全 面 的定 义 , 结 合 平 面 与 曲 面求 交 对 并
LU o g h n L N a J h o s a g C n - o g, I Y h, lZ u - h n
(hpC D E g C n.D l nU i o eh o.D l n1 2 , hn ) S i A n . e t a a nv f c n1 a a 0 4 C ia , i . T , i 1 6
维普资讯
第 1 卷第 5期 1
20 0 7年 1 0月
文 章 编 号 :10 — 2 4 2 0 ) 5 0 9 — 0 7 7 9 ( 0 7 0 — 6 1 1 1
船 舶力 学
J u n l f hp M e h nc o r a i c a is oS
算 法 和基 于 曲 面表 达 的 几何 特 性 计 算 方法 , 各 静 水 力 特性 参 数 进 行 计 算 。这 种 方 法 不 仅 适 合 于传 统 的 静 水 力 对
特 性 计算 , 又适 合 于 任 意 浮 态 下 的静 水 力 特 性 计 算 。 实船 正浮 状 态 下 的静 水 力 特 性 进 行 计 算 , 传 统 方 法 的 计 对 与 算 结 果进 行 对 比和 分 析 , 明 了该 定 义 方 法 的通 用 性 和 实 用性 ; 倾 斜 状 态 下 的 静 水 力 特 性 进 行 计 算 , 总 结 静 说 对 并 水 力 特性 参数 值 随 浮态 的 变 化规 律 , 船 舶 自由浮 态 和 静 稳 性 精确 计 算 提供 基础 。 为 关 键 词 : 舶 : 水 力特 性 ; U B ; 面一 曲面 求 交 ; 何 特 性 ;浮 态 船 静 N RS 平 几
基于参数化船模的静水力计算

传 统 的 二 维 计 算 方 法 过 程 较 为 繁琐 , 且 计 算 结 果 精 度 受 横 剖 面 个 数 的 影 响 。本 文 应 用 数 学 型 线 法 和 三 维 参 数 化 建 模
e x a mp l e .
Ke y wor ds:
h y d r o s t a t i c; pa r a me t e r ; s o l i d s h i p mo d e l
c a n g e n e r a l l y r e le f c t t h e s h i p S s t a t i c p e fo r r ma n c e.Th e t r a d i t i o na l 2 D m e t h o d t o c a l c u l a t e h y d r o s t a t i c i s
a n d s o l i d m o de l r a pi d l y a n d a c c u r a t e l y .W i t h d e v e l o p i n g CATI A s o twa f r e,3 D d e s i g n a n d h y d r o s t a t i c
第3 5卷 第 1期
2 01 3年 1月
舰
船
科
学
技
术
Vo 1 . 3 5 .NO . 1
S HI P SCI ENCE AND TECHN0L0GY
J a n . ,2 0 1 3
基 于 参 数 化 船 模 的静 水 力计 算
“海洋石油301”完成智能化升级数字化运营支持系统助力船队数字化管理
!"钢,王%&,'():基于加密型值表的船体三维数据库3结语基于曲率计算提出一种加密型值表的自适应简化方法,编写VC++程序,建立船体三维型值数据库"在保证计算精度的前提下,提高了计算的实时性,为计算船体稳性及其他各项性能奠定了基础"研究表明:1)基于加密型值表建立的船舶三维数据库具有实际意义和应用前景,在此数据库基础上可以实现船体静水力参数、浮态、稳性、强度等的精确计算"另外,在水尺检量、船舶配载、船舶水动力型、船舶下水计算、船舶阻力和船舶动数型等方的计算等有的应用前景"2)法计算率,提出三率阈值适应选择法,既能保证计算的精度又能保证程序的实时性,简化效果,可用于实际工程应用。
参考文献[1]盛振邦,刘应中.船舶原理:上[M].上海:上海交通大学出版社,2011.[2]东昉,刘正江.数字航海[M].大连:大连海事大学出版社,2010.[3]陆丛红,林焰,纪卓尚.基于NURBS表达的船舶静水力特性精确计算[J].船舶力学,2007(5):691-701.[4]张明霞,纪卓尚.基于NURBS曲面的船舶破舱稳性计算方法研究[D].大连理工大学,中国,大连,2003,[5],昊方,刘明静.基于参数化船的静水力计算[J].舰船科学技术,2013(1):55-58.[6].船舶3D体设计研究[D].大连海事大学,,2013.[7],张秀凤,孙霄峰,等.基于加密型值表的船舶静水力特性精确计算[J].船,2013(4):163-176. [8]刘春雷.散货船智能化配载仪的研究与实现[D].大连:大,2013:9-14.[9]刘春雷,,孙霄峰,等.基于加密型值表的改进水尺计重方法[J].交通运输工程学报,2014,3:58-64. [10]周爱月,李士雨.化工数学[M].3版.北京:化学工业出版,2011.[11]孔令德.计算机图形学基础教程:Visual C++版[M].2版.北京,清华大学出版社,2013.[12]朱心雄.自由曲线曲面造型技术[M].北京,科学出版,2000.【新闻】“海洋石301”完成能化升级数字化营支持系统助船队数化管理2020年7月12日,由上船院设计、中海油能源发展投资建造的国内首艘3万m3液化天然气运输船——“海洋石油301”于广东中远海运重工完成智能化升级第一期工程,志着该船在数字化、智能化道路上开启了新的程。
基于三维设计数据的船舶静水力参数计算

的精度。 赵成璧 等实现了稳性计算程序 ESTAB;徐建红 基于 数字型值表,按照传统的静水力要素计算设计了船舶稳性计 算系统。周瑞平等[5]使用 和 Access 数据库进行静 水力要素计算。姜玲[6]基于 Solidworks 平台进行了二次开 发,实现了静水力要素计算。崔阳[7]基于 CATIA 平台实现了 任 意 浮 态 下 的 静 水 力 要 素 计 算 。 尤 炜 呈 [8] 开 发 出 了 WHUT-ISCS 系统 。
[9]
图 1 散货船“SHANDONG REN HE”的三维设计模型
综上所述,目前我国大部分配载仪使用传统的计算方法 或者基于设计软件做二次开发。传统计算法采用的是二维的 差值计算方法,数据基于静水力数据,需要进行插值计算, 对大倾角下的参数计算精度较差。而对设计软件做二次开发 的方法需要人工建模,精度也不是十分理想。 本文通过对船舶三维设计模型进行切片,将横剖面数据 离线,再进行相关系数的求取,实现了任意浮态下静水力参 数的计算,计算精度较高。 二、船舶数据库建立 1.模型切片 CGAL ( Computational 收稿日期:2016-07-24 作者简介:王智洲(1993-) ,男,汉族,安徽宣城人,大连海事大学航海学院,硕士生,研究方向为船舶静力学。 王 沈 凯(1990-) ,男,大连海事大学航海学院,硕士生。 晔(1993-) ,男,大连海事大学航海学院,硕士生。 许昕骜(1994-) ,男,大连海事大学航海学院,硕士生。 基金项目: 863 课题(2015AA016404) ,海洋公益性行业科研专项(201505017-4) ,中央高校基本科研业务费 (3132016310) 。 Geometry Algorithms 图 2 散货船“SHANDONG REN HE”型表面横剖面示意图 2.数据离线 为了保证程序的实时性,将按照切割肋位切割的船舶横 剖面数据离线保存。这样当水线面改变时可以直接进行求交 等运算,避免再次进行切割运算。 XML(eXtensible Markup Language)代表“可扩展 标记语言” ,它是一种通用的、机器可读的标记语言。XML 能方便有效地表示结构化数据,这就使得 XML 可以作为描
基于NURBS的潜艇型线生成

基于NURBS的潜艇型线生成
林小平;刘祖源
【期刊名称】《武汉理工大学学报(交通科学与工程版)》
【年(卷),期】2005(029)006
【摘要】介绍了non-uniform rational B-spline(NURBS)用于曲线拟合的方法,具体讨论了如何在给定型值点的条件下反求控制顶点,并在建立潜艇型值数据库的基础上,运用该方法开发了潜艇型线生成的计算机程序,为下一步模拟艇体,计算水动力打下了基础.
【总页数】3页(P852-854)
【作者】林小平;刘祖源
【作者单位】武汉理工大学交通学院,武汉,430063;武汉理工大学交通学院,武汉,430063
【正文语种】中文
【中图分类】U662.9
【相关文献】
1.基于NURBS曲线的螺杆转子型线反向设计研究 [J], 黄海楠;何雪明;张荣;姜振钢
2.基于FLUENT的船体NURBS型线优化 [J], 汪敏;吴静萍;许玲
3.基于NURBS的船舶型线设计程序EHULL [J], 赵成璧;邹早建
4.基于NURBS曲线的双艉船型线设计研究 [J], 陈绍平;陈宾康
5.常规潜艇计算机辅助设计的数学型线生成 [J], 陈建国;朱继懋
因版权原因,仅展示原文概要,查看原文内容请购买。
面向船型优化的船舶静水力计算方法

面向船型优化的船舶静水力计算方法蔡寒冰;冯佰威;常海超【摘要】为满足船型优化设计的需要,提出一种基于面元法的船舶静水力计算方法,将船体曲面离散成二维面元,并将对船体的体积分转化为对面元的面积分,以此来计算船型优化问题中的静水力性能数据,并对相关船型进行了对比验证.结果表明,基于面元法的船舶静水力计算方法具有较好的适用性及计算精度,满足船型优化设计的需要.【期刊名称】《武汉理工大学学报(交通科学与工程版)》【年(卷),期】2018(042)006【总页数】5页(P962-965,970)【关键词】船型优化;静水力计算;面元法;形函数【作者】蔡寒冰;冯佰威;常海超【作者单位】武汉理工大学高性能船舶技术教育部重点实验室武汉 430063;武汉理工大学交通学院武汉430063;武汉理工大学交通学院武汉430063【正文语种】中文【中图分类】U662.20 引言近年来,基于仿真的设计(simulation-脚based design,SBD)成为研究前沿的热点课题.SBD技术将计算流体力学(computational fluid dynamics,CFD)技术、计算机辅助几何设计(computational aided design,CAD)技术,以及优化算法等有机地结合到一起,形成了一种新的船型设计模式,具有高效、准确和适用性强等特点,被广泛应用于船型优化设计.优化问题包括设计变量、约束条件和目标函数.为了满足工程实用性,约束条件在优化问题中起关键作用.具体到船型优化设计,一般会以静水力数据作为约束条件,如为保证优化后的船型浮态不发生变化,选择浮心位置作为约束;为不影响船舶的营运性,选择排水量作为约束条件;为不影响船舶的技术性能,选择湿表面积等作为约束.因此,在船型优化过程中,必须能够实时计算船舶静水力参数.刘春雷等[1]使用加密型值表对47 500 t散货船“太行128”进行计算,在型宽、型深及船长方向对船进行细分,读取型值点后对型值点进行直接积分,得到了可靠的结果;王建勋等[2]使用三次样条函数对型值表数据进行插值后反求样条曲线上的点,对这些点积分得到横剖面面积,最后用辛普森积分对横剖面面积进行积分得到全船的排水体积;周念福等[3]对CATIA软件进行了二次开发,使其可以直接对船体曲面切片,通过调用相关函数对这些切片进行计算,最后得出船体体积.以上的几种方法,加密型值表法及样条函数法需要大量数据,对船型优化而言,计算比较繁琐;基于商业软件二次开发的静水力程序需要对相关软件进行集成,增加了集成的成本与难度,故该方法也不能很好地适应船型优化设计的需要.基于此,为满足船型优化的需要,本文采用了一种基于面元法的船舶静水力计算方法[4],该方法首先要提取船体曲面的型值点,再使用这些型值点建立二维参数面元,然后建立对单个面元的数学模型,最后对面元进行积分得到相应的静水力性能数据.1 船体型值点的提取目前,三维船体模型多是基于非均匀有理B样条(non-uniform rational B-spline ,NURBS)表达的,而NURBS曲面为0≤u,v≤1(1)式中:wij为权因子;dij为控制顶点;Ni,k(u),Ni,l(v)分别为u向k次和v向l次的规范B样条基,u、v则是节点矢量.对于任意曲面,获取了曲面NURBS的次数、控制点,以及权因子的信息,可以求得曲面上的点的型值.例如,要在曲面上取100个型值点(此处u方向取10个值,v方向取10个值,记为10×10),就可以分别对u、v取0/9,1/9,2/9,…,9/9,带入到式(1)中,得到相对应的型值点数据.NURBS原理和算法见参考文献[5].根据上述方法,就可以获取船体曲面上的离散型值点.本文对DTMB5415船型的型值点进行了提取,见图1.该船型有三个面,本文对每个面取30×20,即在方向取30个值,方向取20个值,得到了如图1的型值点点云.同时,对得到的型值点进行点/曲面偏差分析,得到这1 800个型值点与曲面的平均距离为2.428×10-7m,满足船型优化的精度要求.图1 船型DTMB5415型值点提取2 基于面元法的静水力计算原理基于面元法的静水力计算方法首先将船体曲面离散为二维参数面元,再依据高斯定理,将对船体的三维体积分转化为对面元的二维面积分,最后对所有面元进行积分,就可以得到该船的静水力性能数据.2.1 二维参数面元的建立根据第一节所述的提取型值点的方法提取船体曲面的型值点,将这些型值点按顺序划分为四边形单元,每一个单元可以看作是一个面元,船体面元见图2.而从船体曲面上提取出的单个面元,见图3,其中,是任意面元的四个角点.图3 船体单个面元图2 船型DTMB5415面元示意[6](2)式中:xi,yi,zi(i=1,2,3,4)分别为单个面元的四个节点坐标值;(ξ,η)为图4中所示的等参坐标;Ni为二维线性形函数,其表达式为(3)图4 4节点面元等参坐标2.2 基于高斯定理的静水力计算模型船舶水下体积V是由船体湿表面Swet和水线面Swl围成,根据高斯定理(4)式,可以将对船体的三维体积分转化为对面元的二维面积分.再根据具体问题,取适当的P,Q,R值,就可以求得相应的静水力性能数据.(4)选取P=v,Q=y,R=0,根据式(5)就可以求得船舶的排水体积:(5)选取P=0.Q=y2/2,R=0,根据式(6)就可以求得船舶的浮心纵向位置.(6)同理,水线面面积、湿表面积、中横剖面面积为(7)横稳性半径、纵稳性半径可由式(8)计算得:(8)各船型系数为CB=Cp=Cvp=(9)2.3 面元上函数数值计算根据2.1内容,船体曲面上的面元被转换成了二维参数线性面元,且每一个面元都是正则的,则每一个面元的法向量可为[7](10)式中:J为雅克比行列式;Υξ(ξ,η),Υη(ξ,η)分别为面元切平面内ξ方向、η方向的方向矢量.根据高斯-勒让德积分公式,则船体积分为(11)式中:m1,m2为节点数,由于本文采用2×2的二维线性参数单元,即此处为2;wi,wj为高斯求积公式的加权系数,本文中为1;参数ξi=±0.577 350 2692;ηi=±0.577 350 269 2.3 船舶静水力计算结果及对比本文开发了基于面元法的船型静水力计算程序.同时,为了验证上文原理的有效性和程序的实用性,分别用商业软件maxsurf和本程序对母型船的静水力性能进行了计算,并选取了排水体积、浮心纵向位置、湿表面积以及方形系数四个参数进行了对比.KCS船型和S60船型的每个面点数取80×30,对每个船型的设计水线处的静水力性能进行计算,即KCS船型取0.341 8 m处水线(记为0.341 8水线,同时若没有特别说明,水线的单位均为m),S60船型取0.163水线.此时,所用KCS船型船模有四个面,采用第一节所述的方法对船型曲面进行离散,离散的型值点共有9 600个;S60船模有二个面,离散的型值点共有4 800个.计算结果分别见表1~2. 表1 KCS船型maxsurf计算结果与程序计算结果对比性能参数maxsurf计算值相对误差/%排水体积/m31.6451.6480.16浮心纵向位置/m3.9663.9790.32湿表面积/m29.5359.5840.51方形系数0.6420.6440.44表2 S60船型maxsurf计算结果与程序计算结果对比性能参数maxsurf计算值相对误差/%排水体积/m30.1210.1210.26浮心纵向位置/m1.591.5900.02湿表面积/m21.61.6060.38方形系数0.590.587-0.44本文选取DTMB5415船型,每个面取80×30,并选取3条水线,分别为0.15水线、0.248水线和0.35水线进行计算.所用DTMB船型船模共有3个面,离散的型值点共有7 200个.计算结果分别见表3~9.表3 80×30点数下0.15水线处DTMB5415船型maxsurf计算结果与程序计算结果对比性能参数maxsurf计算值相对误差/%水线/m0.15排水体积/m30.2580.2580.10浮心纵向位置/m3.133.1450.47湿表面积/m23.343.325-0.45方形系数0.4710.4720.16本文对DTMB5415船型分别再取30×20,50×30,100×30三种密度的型值点,计算该船型在设计水线处的静水力性能.计算结果见表6~8.表4 80×30点数下0.248水线处DTMB5415船型maxsurf计算结果与程序计算结果对比性能参数maxsurf计算值相对误差/%水线/m0.248排水体积/m30.5510.5520.15浮心纵向位置/m3.293.284-0.18湿表面积/m24.8524.8520.00方形系数0.5080.5080.08表5 80×30点数下0.35水线DTMB5415船型maxsurf计算结果与程序计算结果对比性能参数maxsurf计算值相对误差/%水线/m0.35排水体积/m30.9160.9170.13浮心纵向位置/m3.383.376-0.13湿表面积/m26.1376.1420.08方形系数0.5680.5690.11表6 30×20点数下0.248水线处DTMB5415船型maxsurf计算结果与程序计算结果对比性能参数maxsurf计算值相对误差/%点数30×20排水体积/m30.5510.5530.31浮心纵向位置/m3.293.285-0.15湿表面积/m24.8524.844-0.16方形系数0.5080.505-0.68表7 50×30点数下0.248水线处DTMB5415船型maxsurf计算结果与程序计算结果对比性能参数maxsurf计算值相对误差/%点数50×30排水体积/m30.5510.5520.13浮心纵向位置/m3.293.284-0.18湿表面积/m24.8524.851-0.02方形系数0.5080.505-0.50表8 100×30点数下0.248水线处DTMB5415船型maxsurf计算结果与程序计算结果对比性能参数maxsurf计算值相对误差/%点数100×30排水体积/m30.5510.5520.16浮心纵向位置/m3.293.284-0.18湿表面积/m24.8524.8520.01方形系数0.5080.506-0.49表9 不同船型在不同点数下的计算时间 s点数32×2050×3080×30100×30150×50DTMB0.1250.3050.480.61.51KCS0.170.4 0.650.8112S600.0850.210.320.390.99表9中的计算时间是在不同的点数下,按该船型型深平均取5条水线,对这5条水线的计算时间取平均数所得.由表1~2和表3~5可知,基于面元法的静水力计算方法可以较好地计算不同的船型、不同的水线,具有良好的适用性,同时具有较好的精度.由表3~5可知,当水线越高时,计算结果越好.由于DTMB5415船型具有球鼻艏,当水线越低时,船体曲面变化越剧烈,此时,0.15水线处的精度相较于0.248水线以及0.35水线处的数据的精度较低,即曲面变化越剧烈,基于面元法的静水力计算方法的精度越低,反之越高.表4和表6~8可知,型值点越多,计算结果也越好.同时,当每个面的点数大于1 500个,全船总型值点数大于4 500个时,计算结果的误差均在0.5%以下,可以很好地满足船型优化设计的需要.同时,根据表9显示,型值点数越多,计算时间越长.故当船型的型值点数大于4 500个时,本方法可以很好地进行船型优化的静水力计算.4 结论1) 基于面元法的船舶静水力计算方法能很好地适应DTMB5415,KCS,S60等标准船型,具有良好的适用性.2) 基于面元法的船舶静水力计算方法具有较好的计算精度,满足船型优化设计的需要.3) 在船型优化中,基于面元法的船舶静水力计算方法只需要预先设定好计算所需要的点数和计算水线,便可以对目标船型进行计算,集成到船型优化平台上较为便捷;同时,由于其可以自动对船型优化过程中新生成的船型的三维曲面进行读点计算,故其能较好地适应船型优化的需要;此外,该方法计算时间较短,对于需要计算大量船型的船型优化问题具有一定优势.参考文献【相关文献】[1]刘春雷,张秀凤,孙霄峰,等.基于加密型值表的船舶静水力特性精确计算[J].中国造船,2013(1):163-176.[2]王建勋,胡以怀,李孝廉.基于三次样条插值的船舶邦戎曲线计算[J].山东交通学院学报,2011(19):64-67.[3]周念福,叶效伟,郁荣,等.基于CATIA二次开发的水下平台静水力计算[J].船舶工程,2017(4):44-47.[4]王健.MDO方法在水面舰船总体概念设计中的应用研究[D].北京:中国舰船研究院,2017.[5]施法中.计算机辅助几何设计与非均匀有理B样条[M].北京:高等教育出版社,2013.[6]高效伟,彭海峰,杨恺,王静.高等边界面元法:理论与程序[M].北京:科学出版社,2015.[7]陈伟恒.微分几何[M].北京:北京大学出版社,2005.。
基于加密型值表的船舶静水力特性精确计算

A u t o C A D等 。这些计算方法需要人为输入船舶数据,繁琐且容易出错。由于对第三方软件 的依赖 , 程序的移植性和 自 主性受到限制 。且大部分程序计算都依据装载手册 中提供的简单型值表 ,不能保证
计算 结 果 的准 确 性 。在计 算 船舶 任意 浮态 的体积 和浮 心 坐标 时 ,传统 的计 算 方法 是对 船型进 行 插值 , 但 插 值 数据 并 不一 定是 船舶 真 实数 据 【 5 ] 。随着 计 算机 技 术 的发展 和数 字造 船 技术 在 船厂 的应 用 , 目前 主流 的船 舶 设计 软件 都可 以根据 实 际需要 输 出任 意程 度加 密 的数 字型 值表 ,这 些数 据 能更准 确 的描 述
5 4卷
第 4期 ( 总第 2 0 7 期)
中
国
造
船
v0 1 . 5 4 No . 4( S e r i a l No . 2 0 7 )
De c .2 0 1 3
2 0 1 3年 1 2月
S H I P B UI L D I NG O F C H I NA
文章编号 :1 0 0 0 . 4 8 8 2( 2 0 1 3 )0 4 . 0 1 6 3 . 1 4
5 4卷
第 4期
( 总第 2 0 7期)
刘 春 雷 ,等 :基于 加 密型 值 表 的船舶 静 水力 特 性 精确 计 算
1 6 5
舷和 向首倾 斜 为正 们 。 在 求取 船舶 任 意浮态 下 的排水 体积 和 浮心 坐标 时 ,需要用 到这 两个 坐标 系 的变 换 ,其 变换 矩 阵为 ( 1 )从船体 坐标 系 o x y z到 固定坐 标系 O X’ Y’ z ’
ห้องสมุดไป่ตู้
深水系泊系统静力特性快速计算方法研究
深水系泊系统静力特性快速计算方法研究张火明;范菊;杨建民【摘要】为研究深水系泊系统静力特性,以工作水深为320 m的转塔式浮式生产存储系统为例,首先计算出每种类型锚泊线的水平张力TH-水平跨距X曲线、上端系缆点水平移动距离、每根锚泊线新的水平跨距,插值求出此时的每根锚泊线水平张力,投影合成后即得上端系缆点移动后的系泊系统X方向水平恢复力,垂直方向的恢复力计算方法与此类似.相应计算结果与Dynfloat软件结果相吻合.【期刊名称】《船海工程》【年(卷),期】2007(036)002【总页数】5页(P64-68)【关键词】深海平台;系泊系统;静力特性【作者】张火明;范菊;杨建民【作者单位】中国计量学院计算机软件及理论研究所,杭州,310018;上海交通大学海洋工程国家重点实验室,上海,200030;上海交通大学海洋工程国家重点实验室,上海,200030【正文语种】中文【中图分类】P75;TP309世界范围内海洋开发正在向深海进军,许多创新研制的适用于深海开发的新型海上石油生产处理装置不断涌现[1],其中就包括浮式生产储油轮(FPSO)、半潜式平台、张力腿式平台(TLP)、单柱式平台(SPAR)等已获得广泛成功应用的新型平台。
这些海上漂浮结构物的海上定位需要通过动力定位和锚泊系统的约束来实现[2-5]。
其中锚泊系统在海洋和海岸工程中的应用十分广泛,形式也多种多样,受力情况十分复杂,通常情况下无法得出解析的表达形式,而不得不采用数值分析的方法来实现[2-5]。
目前研究中,对锚链系统静力分析[6-7]的方法很多,给出了很多应用程序,用于求解锚链系统的受力和变形,其计算过程一般需采用多次迭代的方法,最终找到锚链顶端受力与锚链顶端位置的关系,一般很耗机时,因此有必要考虑采用简单直观的方法。
1.1 锚泊线静力计算基本方程锚泊线可由多段不同重量和尺寸的索或链组成,段与段之间可有集中质量(悬挂重锤或浮球)。
方法对松弛(有剩余索链躺在海底的)和张紧的(索链全部提起其下端拉力倾斜的)两种系泊状态均适用。
船体曲面几何表达及水动力性能计算的NURBS方法

船体曲面几何表达及水动力性能计算的NURBS方法
张晓兔;滕斌;信书
【期刊名称】《海洋工程》
【年(卷),期】2004(22)2
【摘要】采用非均匀有理B样条(NURBS)对船体曲面形状进行几何表达,所生成的网格直接用于后续的有关船体水动力性能计算工作中。
对Wigley船型的线性兴波阻力和斜航操纵运动的船体,结合近似的Kutta条件作了相应的数值计算,从与试验结果的比较来看,该方法具有较好的工程精度,对船舶及海洋工程领域中的计算机辅助设计(CAD)与计算流体动力学(CFD)之间的相互集成,具有推动与促进作用。
【总页数】6页(P7-12)
【关键词】非均匀有理B样条;计算机辅助设计;计算流体动力学;水动力性能
【作者】张晓兔;滕斌;信书
【作者单位】大连理工大学海岸和近海工程国家重点实验室
【正文语种】中文
【中图分类】TP391.7;U661.3
【相关文献】
1.基于NURBS曲面数据的船体体积计算方法的研究 [J], 周燕芳
2.螺旋桨水动力性能计算粘性流体CFD方法的应用与研究 [J], 叶剑平;庄光宇
3.浅水中船体操纵水动力导数计算方法的改进 [J], 刘正江
4.复杂形状船体剖面水动力系数计算方法研究 [J], 高霓; 孙树政; 赵晓东; 李积德
5.复杂形状船体剖面水动力系数计算方法研究(英文) [J], 高霓; 孙树政; 赵晓东; 李积德
因版权原因,仅展示原文概要,查看原文内容请购买。
基于NURBS曲面数据的船体体积计算方法的研究

基于NURBS曲面数据的船体体积计算方法的研究周燕芳*【摘要】摘要:应用ObjectARX在AutoCAD上进行二次开发,设计并实现了基于NURBS曲面数据的船体体积的计算程序。
与传统的先建立数学模型,再测出特征点、关键点后进行拟合计算的单点测量方法相比,在效率和技术上得到了更好的改进,提高了计量的准确性和可靠性。
【期刊名称】城市勘测【年(卷),期】2012(000)004【总页数】3【关键词】关键词:NURBS;ObjectARX;AutoCAD;体积计算1 引言船体是复杂的不规则体,传统的计算实体船体体积方法是先建立数学模型,再测出特征点、关键点后进行拟合。
拟合后将船体沿三个互相垂直的方向切片,这样三维复杂几何体的几何特性计算就转化为一系列平面的几何特性计算[1]。
此方法与现代化的性能分析计算自动化、智能化、高精度的趋势不相适应。
本文提出并设计了基于NURBS[2](Non-Uniform Rational B-Spline,非均匀有理B样条)的船体体积计算程序,能直接在三维空间下计算船体的体积。
对已建造好的船体,利用三维激光扫描技术得到船体表面大量激光点云数据。
经过点云数据的预处理和分析,重构NURBS曲面来拟合表达船体表面,最终得到用来描述三维船体的互相衔接的NURBS曲面数据。
NURBS曲面数据可进行规则化格网输出,根据曲面的特性输出不同间隔的规则化格网。
基于NURBS曲面数据的船体体积计算程序关键算法有:①船体NURBS曲面数据的三角剖分算法;②船体曲面交线三角形的计算;③船体曲面与任意高度的求交算法;④封闭三维曲面体的体积计算。
2 ObjectARX简介AutoCAD具有强大的图形交互功能,并且支持多种方式的二次开发。
ObjectARX以C++为编程语言,采用先进的面向对象的编程原理,提供可与Auto-CAD直接交互的开发环境。
同时包括一组动态链接库(DLL),库中包含一组通用工具,使得二次开发者可以充分利用AutoCAD的开放结构,直接访问Auto-CAD数据库结构、图形系统以及CAD几何造型核心,以便能在运行期间实时扩展AutoCAD的功能[3]。
基于nurbs高阶面元法的浅水船舶兴波阻力计算

基于nurbs高阶面元法的浅水船舶兴波阻力计算NURBS高阶面元法浅水船舶兴波阻力的计算是船舶设计领域的一个重要研究课题。
NURBS高阶面元法是近年来一种新兴的船舶水动力学仿真技术,它具有高精度、高效率和高准确性的优势,应用于浅水船舶兴波阻力计算得到广泛的应用。
本文系统总结了NURBS高阶面元法浅水船舶兴波阻力计算的基本原理,以及它在浅水船舶兴波阻力计算方面所取得的重要成果,并未梳理总结了其可能出现的主要问题及其解决方案,包括:一、NURBS高阶面元法浅水船舶兴波阻力计算的原理:1. 数值模型:用NURBS高阶面元法来建立浅水船舶的数值模型,利用基本的流场信息来进行船舶兴波阻力的计算;2. 面元法:引入了面元法技术来提高数值计算的精度,以及把实际(真实)的裸船形态表示成面元形状,更有利于浅水船舶的兴波阻力的计算;3. 单元技术:利用单元技术来建立流体场和壳体边界两者之间的相互作用,从而更有效地计算浅水船舶兴波阻力;4. 基本程序:改进后的基本程序,能够更准确地描述浅水船舶的结构特征,这样可以更准确地预计浅水船舶的兴波阻力;二、NURBS高阶面元法浅水船舶兴波阻力计算的优势:1. 高精度:NURBS高阶面元法能够更加精确地描述浅水船舶的复杂形态,从而可以更准确地计算浅水船舶的兴波阻力;2. 高效率:NURBS高阶面元法利用空间离散技术和单元技术,大大提高了计算速度,从而更有效地计算浅水船舶兴波阻力;3. 高准确性:借助于3D绘图技术和改进后的基本程序,NURBS高阶面元法可以实现高准确的兴波阻力计算;三、NURBS高阶面元法浅水船舶兴波阻力计算可能出现的问题及解决方法:1.计算精度:在计算精度方面,应该充分利用面元技术,增加面元的精度,同时根据船舶的复杂形态使用不同的模拟工具来改进模拟精度,从而提高计算精度;2.计算时间:在计算时间方面,应该引入新的数据结构和算法,减少计算时间,并且合理利用并行计算,优化计算过程;3.计算空间:针对实际空间中的复杂船体形态,应该使用新的数据表示和表示变换来仔细研究模型分布,从而有效地减少计算空间。
基于参数化船模的静水力计算
基于参数化船模的静水力计算李日杰;吴方良;刘明静【摘要】船舶静水力要素全面表达了船舶浮性和稳性随吃水而变化的规律,能够综合反映船舶的静力性能.传统的二维计算方法过程较为繁琐,且计算结果精度受横剖面个数的影响.本文应用数学型线法和三维参数化建模方法,快速生成船体型线,精确构建附带属性和边界条件的船舶三维模型,通过对CATIA软件进行二次开发,将三维设计和静水力计算有效集成,提出基于船舶三维参数化建模的静水力计算方法,可以直接计算和获取其静水力要素,操作简单,结果可靠,具有较强的实用性.%Ship hydrostatic which widely describes the ship's law of buoyancy and stability with depth can generally reflect the ship's static performance. The traditional 2D method to calculate hydrostatic is troublesome and its accuracy is relative to transverse section number selected. The methods to drawing ship lines by mathematic function and modeling with parameter are used in this paper,which can create ship lines and solid model rapidly and accurately. With developing CATIA software, 3D design and hydrostatic calculation are integrated. This paper proposes the method to calculation of ship hydrostatic based on parametric modeling, which directly gains the result. The good operability and reliability is proved by an example.【期刊名称】《舰船科学技术》【年(卷),期】2013(035)001【总页数】4页(P55-58)【关键词】静水力;参数化;实体船模【作者】李日杰;吴方良;刘明静【作者单位】中国舰船研究设计中心,湖北武汉430064;中国舰船研究设计中心,湖北武汉430064;中国舰船研究设计中心,湖北武汉430064【正文语种】中文【中图分类】U661.2+10 引言三维设计由于突破了平面和二维设计模式的限制,对于总体综合布置具有重要的意义,在航空、船舶和汽车等各行业应用都十分广泛[1]。
基于Visual FoxPro的船舶静水力计算及曲线绘制

基于Visual FoxPro的船舶静水力计算及曲线绘制宋晶晶【摘要】本文在对传统的船舶静水力计算方法分析的基础上,依托Visual FoxPro6.0语言,进行编程、研究,从而实现可视化的船舶静水力计算界面,并输出计算数据,从而绘制出船舶静水力曲线。
%Through the analysis of traditional static hydraulic ship, this paper carries on programing and research based on Visual FoxPro6.0 language, so as to realize the visualization of marine Hydrostatic Calculation interface, and outputs the calculated data, to draw the ship hydrostatic curves.【期刊名称】《价值工程》【年(卷),期】2017(036)003【总页数】3页(P151-152,153)【关键词】船舶静水力曲线;Visual FoxPro;浮性;稳性;船型系数【作者】宋晶晶【作者单位】渤海船舶职业学院船舶工程系,葫芦岛125000【正文语种】中文【中图分类】U661.4船舶静水力计算是船舶性能计算的重要组成部分,是船舶设计过程中的重要技术资料,全面表达了船舶在静止正浮状态下浮性和稳性要素随吃水而变化的规律,并作为稳性计算、纵倾计算及其他隐蔽性计算的基础,静水力曲线的准确与否,直接影响整个船舶设计过程。
通过VF程序的设计,使得静水力计算具有较好的实用性,不同船舶的静水力计算,仅仅是数据源的差别,通过程序运行的方式得到静水力曲线计算和绘制结果,不仅提高了工作效率,而且能有效地保证计算结果的准确性,提高了数据的可视化功能。
船舶静水力计算的技术路线如图1所示。
船舶静水力曲线包括型排水体积、总排水体积、总排水量、浮心纵向坐标曲线、浮心竖向坐标曲线、漂心纵向坐标曲线、水线面面积曲线、每厘米吃水吨数曲线、横稳心半径曲线、纵稳心半径曲线、每厘米纵倾力矩曲线、水线面系数曲线、中横剖面系数曲线、方形系数曲线和棱形系数曲线,如图2所示。
船舶静水力参数计算及曲线绘制研究
thisform.text12.value=Ti(n1) bel14.caption='Aw'+alltrim(str(n1-1)) thisform.text13.value=AW && 水线半宽面积 bel15.caption=' 成对和 '+alltrim(str(n1-1)) thisform.text14.value=cdh(n1)&& 成对和 bel16.caption=' 积分和 '+alltrim(str(n1-1)) thisform.text15.value=jfh(n1)&& 积分和 bel17.caption=' 排水体积 '+alltrim (str (n11)) thisform.text16.value=pstj(n1) bel18.caption=' 排水量 '+alltrim(str(n1-1))
5301 695 2464 9417 8699 10726
10826
19 378 800 1076 1271 1445 689 2755 4080
3441 7921 11484 9002 11049
20
322 1380 2710
3636 8801 10688
9341 11408
12408
bel13.caption='T'+alltrim(str(n1-1)) Ti(n1)=dT*(n1-1) && 吃水
6900 8
基于NURBS方法的船舶随浪航行纯稳性损失研究

基于NURBS方法的船舶随浪航行纯稳性损失研究NURBS方法是一种用于对曲线和曲面进行建模和计算的数学方法,它在船舶设计和性能评估中得到了广泛应用。
在船舶随浪航行情况下,船舶的稳性损失是一个重要的研究课题,对船舶的安全性和航行效率有着重要的影响。
本文基于NURBS方法对船舶随浪航行时的纯稳性损失进行了深入研究。
首先,我们对NURBS方法在船舶设计中的应用进行了介绍。
NURBS方法是一种基于非均匀有理B样条的曲线和曲面建模方法,它具有高度灵活性和精度,可以准确地描述复杂曲线和曲面。
在船舶设计中,NURBS方法可以用来建立船体的几何模型,通过调整NURBS曲线和曲面的控制点和权重来改变船体的形状,从而实现对船舶外形的灵活调整。
接着,我们详细介绍了船舶随浪航行时的纯稳性损失问题。
在波浪作用下,船舶会受到来自波浪的作用力和力矩,导致船体产生横摇、纵摇和侧倾等稳性问题。
船舶的稳性特性对船舶的安全性和航行性能有着重要的影响,因此对船舶在波浪中的稳性损失进行深入研究具有重要的意义。
在研究中,我们基于NURBS方法建立了船舶在波浪中航行时的数学模型,并利用数值方法进行了仿真分析。
我们考虑了波浪的高度、周期和方向等因素对船舶稳性的影响,分析了船舶在不同波浪条件下的航行性能。
通过调整船舶的姿态和船体的几何形状,我们研究了如何减小船舶在波浪中的稳性损失,提高船舶的航行稳定性。
最后,我们总结了本文的研究成果,并指出了未来研究的方向。
通过NURBS方法对船舶随波行驶的纯稳性损失进行研究,可以提高船舶设计的效率和精度,为航行中的稳定性问题提供新的解决方案。
未来可以进一步考虑复杂波浪条件下的航行性能研究,优化船体的设计和控制策略,提高船舶在波浪中的稳定性和安全性。
同时,还可以结合实验验证和实际航行数据进行验证,进一步完善研究成果,为船舶设计和运营提供更好的支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第11卷第5期船舶力学Vol.11No.52007年10月JournalofShipMechanicsOct.2007文章编号:1007-7294(2007)05-0691-11基于NURBS表达的船舶静水力特性精确计算陆丛红,林焰,纪卓尚(大连理工大学船舶CAD工程中心,辽宁大连116024)摘要:在船体曲面NURBS表达基础上,对船舶静水力特性参数进行精确而全面的定义,并结合平面与曲面求交算法和基于曲面表达的几何特性计算方法,对各静水力特性参数进行计算。
这种方法不仅适合于传统的静水力特性计算,又适合于任意浮态下的静水力特性计算。
对实船正浮状态下的静水力特性进行计算,与传统方法的计算结果进行对比和分析,说明了该定义方法的通用性和实用性;对倾斜状态下的静水力特性进行计算,并总结静水力特性参数值随浮态的变化规律,为船舶自由浮态和静稳性精确计算提供基础。
关键词:船舶;静水力特性;NURBS;平面—曲面求交;几何特性;浮态中图分类号:U661.21文献标识码:APrecisecalculationofshiphydrostaticperformancesbasedonNURBSshipformLUCong-hong,LINYan,JIZhuo-shang(ShipCADEng.Cent.,DalianUniv.ofTechnol.,Dalian116024,China)Abstract:BasedontheNURBSrepresentationoftheshiphull,thepreciseandgeneraldefinitionsofthehydrostaticparametersaregiven.Combiningtheplane-surfaceintersectionalgorithmandthegeometricpropertiescalculationmethod,thehydrostaticparametersarecalculated.Thismethodisappropriatetonotonlythecalculationoftheconventionalhydrostaticperformancesbutalsotheonesunderanyinclinationfloatation.Thehydrostaticperformancesofthefull-scaleshipsarecalculatedatzerotrim.Thecalculationresultsandtheircomparisonwiththeconventionalonesofthefull-scaleshipsverifythegeneralizationandpracticalityofthismethod.Thehydrostaticperformancesunderinclinationconditionarecalculatedandthevariationrulesofthevaluesofthehydrostaticparametersagainstfloatationaresummarized.Thisstudypro-videsfoundationsfortheprecisecalculationofthefreefloatationandstabilityoftheship.Keywords:ship;hydrostaticperformance;NURBS;plane-surfaceintersection;geometricproperties;floatation1引言静水力曲线是船舶的重要技术资料,船舶设计、建造、营运和检查等部门以及船员用静水力曲线来计算与船舶航行性能有关的性能参数[1,2]。
静水力特性参数包括浮性参数、稳性参数和船型系数参收稿日期:2006-09-12基金项目:中国博士后科学基金资助项目(20060390305)作者简介:陆丛红(1972-),女,大连理工大学在站博士后,研究三维参数化船舶CAD。
数,静水力曲线即为各参数与吃水之间的函数关系曲线。
由于二维表达的局限性,传统的静水力特性只针对船舶正浮状态进行定义和计算[1-6]。
但为了提高螺旋桨推进效率,减少首兴波阻力和防止触礁,配载时一般要使船舶具有初始纵倾,而且当船舶破损后需要扶正时,应根据破损浮态下的静水力特性参数进行浮态调整并采取扶正措施。
另外,在船舶设计阶段,越来越多的船东需要提供一系列指定纵倾角下的静水力特性[7]。
而对于一些纵向尺度和横向尺度比较接近的海洋结构物,如海洋平台,其最危险的倾斜方向不一定是绕船体纵轴的横向倾斜,必须找到使平台倾覆的最危险的风浪方向。
传统的静水力特性定义和计算方法不能全面地考虑这些因素,有可能出现对船舶的安全隐患估计不足的情况,因此有必要对船舶的静水力特性参数进行一种新的定义,使其不仅适合于传统的静水力特性计算又适合于任意浮态的静水力特性计算以及建立在此基础上的其他相关性能计算,以方便于浮态和纵倾调整以及破损后的扶正。
本文对船舶静水力特性参数进行精确而全面的定义,结合船体曲面NURBS表达[8]、平面与曲面求交算法[9]和基于曲面表达的几何特性计算方法[10],对船舶正浮状态的静水力特性进行计算,并与传统方法的计算结果进行对比和分析,说明了该定义方法的通用性和实用性;计算倾斜状态下的静水力特性,并总结静水力特性参数值随浮态的变化规律,在此基础上可精确地计算船舶自由浮态和稳性[11,12]。
2静水力特性参数定义2.1船体坐标系定义为了便于描述船舶静水力特性参数,选用固定在船上的直角坐标系。
如图1所示,建立三个相互垂直的平面—基平面、中纵剖面和中横剖面,以这三个平面的交点为坐标原点,以该三个平面的交线作为坐标轴Ox,Oy和Oz轴,并取Ox轴向船首为正,向船尾为负;Oy轴向右舷为正,向左舷为负;Oz轴向上为正,向下为负。
在正浮状态下船舶静水力特性各参数定义的基础上,定义任意浮态下的静水力特性参数,包括表1中所列各项内容。
表中各参数在任意初始浮态下定义如下:2.2浮性参数(1)排水体积V:水线面以下船体的体积。
(2)排水量!:!=!V,!为水的密度。
(3)水线面面积AW:水线面与船体曲面间交平面的面积。
(4)漂心纵向坐标LCF:水线面面积形心的x坐标。
(5)漂心横向坐标TCF:水线面面积形心的y坐标,对于形状为左右对称的船体曲面,正浮状态图1船体坐标系定义Fig.1Coordinateofshiphull表1船舶静水力特性参数Tab.1Parametersofhydrostaticperformances类别序号参数名称符号单位浮性参数(1)(2)(3)(4)(5)(6)(7)(8)(9)(10)排水体积排水量水线面积漂心纵向坐标漂心横向坐标漂心竖向坐标浮心纵向坐标浮心横向坐标浮心竖向坐标每厘米吃水吨数V!AWLCFTCFVCFLCBTCBVCBTPCm3tm2mmmmmmt/cm稳性参数(1)(2)(3)横稳心垂向坐标纵稳心垂向坐标每厘米纵倾力矩ZMZMLMCTmmt・m船型系数参数(1)(2)(3)(4)(5)水线面系数方形系数中横剖面系数纵向棱形系数竖向棱形系数CWCBCMCPCVP——————湿表面积SWm2692船舶力学第11卷第5期下该值为0。
(6)漂心竖向坐标VCF:水线面面积形心的z坐标,正浮状态下该值等于吃水值。
(7)浮心纵向坐标LCB:船体排水体积的体积心x坐标。
(8)浮心横向坐标TCB:船体排水体积的体积心y坐标,对于形状为左右对称的船体曲面,正浮状态下该值为0。
(9)浮心竖向坐标VCB:船体排水体积的体积心z坐标。
(10)每厘米吃水吨数TPC:在某吃水位置,平均吃水增加1cm时所增加的排水量。
2.3稳性参数(1)横稳心垂向坐标ZM:在任意初始平衡状态下,船舶作小角度横倾,倾斜前后两浮力作用线在横剖面上投影的交点垂向坐标。
如图2所示,W0L0为正浮水线,WILI为初始平衡状态水线,其横倾角为θ,WθLθ为船舶自初始平衡状态倾斜一微小角度dθ时的水线,水线WILI下的浮力作用线与WθLθ下的浮力作用线在横剖面上投影的交点称为该倾角状态下的横稳心M,且有CIM=CθM,常用r表示,称为该初始平衡状态的横稳心半径。
根据几何关系和传统定义方法,横稳心垂向坐标ZM=r×cosθ+zc=IxfV×cosθ+VCB(1)式中,Ixf为水线面WILI的面积对通过漂心纵轴的惯性矩,θ为船舶初始平衡状态相对正浮状态的横倾角,θ=0时,ZM即为正浮状态下的横稳心垂向坐标。
(2)纵稳心垂向坐标ZML:在任意初始平衡状态下,船舶作小角度纵倾,倾斜前后两浮力作用线在纵剖面上投影的交点垂向坐标。
与ZM定义同理,如图3,纵稳心垂向坐标ZML=R×cosψ+zc=IyfV×cosψ+VCB(2)式中,R为初始平衡状态的纵稳心半径,Iyf为水线面WILI的面积对通过漂心横轴的惯性矩,ψ为船舶初始平衡状态相对正浮状态的纵倾角,ψ=0时,ZML即为正浮状态下的纵稳心垂向坐标。
(3)每厘米纵倾力矩MCT:在任意初始平衡状态下,引起船舶纵倾1cm所需的纵倾力矩MCT≈ΔR100L(3)可以看出,稳性参数是随初始平衡状态的倾角而变化的参数,同一艘船舶在相同的排水量条件下,不同的倾斜状态会有不同的稳性参数。
2.4船型系数参数(1)水线面系数CW如图4所示,首先定义以船长、船宽和型深为长、宽和高的长方体BS,用任意水线面截取该长方体所得的截面面积设为ST,CW定义为该水线面的面积AW与ST的比。
(2)方形系数CB如图4所示,设长方体BS在水线面以下的体积为VT,则CB为排水体积V和体积VT的比。
图2横稳心垂向坐标ZMFig.2VerticalcoordinateoftransversemetacenterZM图3纵稳心垂向坐标ZMLFig.3VerticalcoordinateoflongitudinalmetacenterZML第5期陆丛红等:基于NURBS表达的船舶静水力…693(3)中横剖面系数CM如图5所示,用中横剖面截取BS在水下的部分,所得的横截面面积设为AM。
CM定义为船中横剖面在水线以下部分的面积AMB和AM的比。
图4水线面系数与方形系数图5中横剖面系数Fig.4WaterplanecoefficientandblockcoefficientFig.5Midshipsectioncoefficient(4)纵向棱形系数CP如图6所示,以船中横剖面和船长构造柱体,用任意水线面截取该柱体所得的水下部分体积设为VP,CP为船舶排水体积V和体积VP的比。