-基于MATLAB的双容水箱液位的模糊神经控制
基于MATLAB的水箱水位模糊控制系统的设计

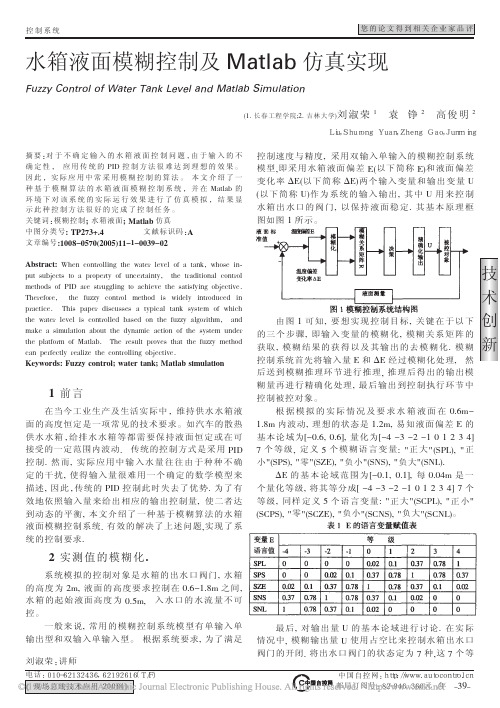
小相位特性、不稳定性、时滞和负荷干扰等。若采用单一的水位反馈控制难以达到预期的控 制效果,所以采用了仿人的模糊控制方法依据操作人员的现场经验制成模糊控制表,通过判 断水位的偏差及偏差变化率来控制输出,并易于在 PLC 上实现。模糊 PID 控制器的特点是在 大范围内利用模糊推理的方法调整系统的控制量 U,而在小偏差范围内转换成 PID 控制,两 者的转换根据事先给定的偏差范围自动实现[3]。这样做的好处是:既保证动态响应效果,又 能改善稳态控制精度。图 3 为模糊 PID 控制器的系统方框图。
r
+ _
PID 控制器 e
ec 模糊控制器 d/dt
e y
对象 U
变送器
图 3 模糊 PID 控制器系统方框图
其中,模糊控制器和 PID 控制器的切换是通过在 MATLAB 的 M 文件中事先设定误差 e 的 范围来自动实现的[4]。选取水位误差 e 的基本论域为[-10cm,10cm],选取误差变化率 ec 的 基本论域为[-4,4],选取控制量 u 的基本论域为[0,4000]。e、ec、u 的语言变量值分别 为:e={NB,NM,NS,ZE,PS,PM,PB},ec={NB,NM,NS,ZE,PS,PM,PB},u={NB,NM, NS,ZE,PS,PM,PB}。
在现代工业生产及日常生活中,有很多方面都会涉及到水位控制这个问题。而在绝大多 数情况下,我们是很难或是不可能得到被控对象的精确数学模型的,因此采用数学工具或计 算机仿真技术的传统控制理论已经无法解决此类系统的控制问题。[1]智能控制的概念主要是 针对控制对象及其环境、目标和任务的不确定性和复杂性而提出来的,而模糊逻辑控制则作 为一种新颖的智能控制方式越来越受到人们的重视。模糊逻辑控制是智能控制领域的重要发 展方向,模糊控制技术被称为“21 世纪的核心技术”。
双容水箱实验报告(采用PID+模糊控制)
目次之袁州冬雪创作摘要2一.PID节制原理、优越性,对系统性能的改善2二.被控对象的分析与建模3三.PID参数整定方法概述43.1 PID节制器中比例、积分和微分项对系统性能影响分析43.1.1 比例作用43.1.2 积分作用53.1.3 微分作用63.2 PID参数的整定方法63.3 临界比例度法83.4 PID参数的确定10四.节制布局104.1 操纵根轨迹校正系统104.2 操纵伯德图校正系统124.3 调整系统节制量的恍惚PID节制方法13144.3.2 PID节制部分16五.节制器的设计16错误!未定义书签。
错误!未定义书签。
参考文献17摘要:针对双容水箱大滞后系统,采取PID方法去节制.首先对PID节制中各参数的作用停止分析,采取根轨迹校正、伯德图校正的方法,对系统停止校正.最后采取调整系统节制量的恍惚PID节制的方法,对该二阶系统停止节制.同时,在MATLAB下,操纵Fuzzy工具箱和Simulink仿真工具,对系统的稳定性、反应速度等各指标停止分析.关键字:双容水箱,大滞后系统,恍惚节制,PID,二阶系统,MATLAB ,SimulinkAbstract:For Two-capacity water tankbig lag system,using PID to control this system. First, to analyze the effectofeach parameter of PID. And the root-locus technique and bode diagram is adopted to design the correcting Unit.Then, fuzzy PID control method was used to adjust this second-order system.And a simulation model of this system is built with MATLAB Fuzzy and SIMULINK,with it analyzing the system stability ,reaction velocity and other indexs.Keywords:two-capacity water tank,big lag system,fuzzy control,PID,second-order system一.PID节制原理、优越性,对系统性能的改善当今的自动节制技术绝大多数部分是基于反馈.反馈实际包含三个基本要素:丈量、比较和执行.丈量关心的是变量,并与期望值相比较,以此偏差来改正和调节节制系统的响应.反馈实际及其在自动节制的应用的关键是:作出正确的丈量与比较后,如何将偏差用于系统的改正和调节.在过去的几十年里,PID节制,即比例-积分-微分节制在工业节制中得到了广泛的应用.虽然各种先进节制方法不竭涌现,但PID节制器由于布局简单,在实际应用中较易于整定,且具有不需切确的系统模子等优势,因而在工业过程节制中仍有着非常广泛的应用.而且许多高级的节制技术也都是以PID节制为基础的.下面是典型的PID节制系统布局图:图1-1其中PID节制器由比例单元(P)、积分单元(I)和微分单元(D)组成.(1)比例(P)调节作用是按比例反应系统的偏差,系统一旦出现了偏差,比例调节当即发生调节作用用以减少偏差.比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定.(2)积分(I)调节作用是使系统消除稳态误差,提高无差度.因为有误差,积分调节就停止,直至无差,积分调节停止,积分调节输出一常值.积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强.反之Ti大则积分作用弱,加入积分调节可以使系统稳定性下降,动态响应变慢.积分作用常与另两种调节规律连系,组成PI调节器或PID调节器.(3)微分(D)调节作用微分作用反映系统偏差信号的变更率,具有预见性,能预见偏差变更的趋势,因此能发生超前的节制作用,在偏差还没有形成之前,已被微分调节作用消除.因此,可以改善系统的动态性能.在微分时间选择合适情况下,可以减少超调,减少调节时间.微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰晦气.此外,微分反应的是变更率,而当输入没有变更时,微分作用输出为零.微分作用不克不及单独使用,需要与别的两种调节规律相连系,组成PD或PID节制器.二.被控对象的分析与建模该系统节制的是有纯延迟环节的二阶双容水箱,示意图如下:图2-1其中12A A 分别为水箱的底面积,123q q q 为水流量,12R R 为阀门1、2的阻力,称为液阻或流阻,经线性化处理,有:2R h q ∆=∆.则根据物料平衡对水箱1有:拉式变换得:对水箱2:拉式变换得:则对象的传递函数为:其中211R A T =为水箱1的时间常数,322R A T =水箱2的时间常数,K 为双容对象的放大系数.若系统还具有纯延迟,则传递函数的表达式为:其中0τ延迟时间常数.在参考各种资料和数据的基础上,可设定该双容水箱的传递函数为:三.PID 参数整定方法概述3.1 PID 节制器中比例、积分和微分项对系统性能影响分析在MATLAB 中建立对象的传递函数模子5022()100201s G S e s s -=++,在饬令行中输入: sys=tf(2,[10020 1],'inputdelay',5);sysx=pade(sys,1);比例作用分析在分歧比例系数下,系统的阶跃响应图,输入饬令:P=[0.1 0.5 1 5 10];figure,hold onfor i=1:length(P)G=feedback(P(i)*sys,1);step(G)end得到图形如下:图3-1图中分别绘出了K为0.1,0.5,1,5,10时的阶跃响应图,可知当K增大时系统的稳态误差不竭减小,响应时间加快,并出现振荡.积分作用分析在分歧积分常数下,系统的阶跃响应图,输入饬令:Ti=[3:0.5:5];t=0:2:100;figure,hold onKp=1;for i=1:length(Ti)Gc=tf(Kp*[1,1/Ti(i)],[1,0]);G=feedback(Gc*sys,1 );step(G,t)end得图形如下:图3-2由图可知,积分作用虽可消除误差,但加入积分调节可以使系统稳定性下降,途中甚至可出现不稳定的情况,同时动态响应变慢,调节时间变大.微分作用分析在分歧微分时间常数下,系统的阶跃响应图,输入饬令:Td=[1:4:20];t=0:1:100;figure,hold onfor i=1:length(Td)Gc=tf([5*Td(i),5,1],[5,0]);G=feedback(sys*Gc,1) ;step(G,t)end得图形如下:图3-3图中绘出了Td为1逐渐增大至20时的系统阶跃响应变更趋势,可知微分时间常数增加时,系统上升时间增加了,但是调节时间减少,更重要的是由于带有预测作用,惯性系统的超调量大大减小了.3.2 PID参数的整定方法采取PID节制器时,最关键的问题就是确定PID节制器中比例度PB、积分时间Ti和微分时间Td.一般可以通过实际计算来确定这些参数,但往往有误差,不克不及达到抱负的节制效果.因此,今朝,应用最多的有工程整定法:如经历法、衰减曲线法、临界比例度法和反应曲线法,各种方法的大体过程如下:(1)经历法又叫现场凑试法,即先确定一个调节器的参数值PB和Ti,通过改变给定值对节制系统施加一个扰动,现场观察断定节制曲线形状.若曲线不敷抱负,可改变PB或Ti,再画节制过程曲线,经反复凑试直到节制系统符合动态过程品质要求为止,这时的PB和Ti就是最佳值.如果调节器是PID三作用式,那末要在整定好的PB和Ti的基础上加进微分作用.由于微分作用有抵制偏差变更的才能,所以确定一个Td值后,可把整定好的PB和Ti值减小一点再停止现场凑试,直到PB、Ti和Td取得最佳值为止.显然用经历法整定的参数是准确的.但花时间较多.为缩短整定时间,应注意以下几点:①根据节制对象特性确定好初始的参数值PB、Ti和Td.可参照在实际运行中的同类节制系统的参数值,或参照表3-4-1所给的参数值,使确定的初始参数尽可以接近整定的抱负值.这样可大大减少现场凑试的次数.②在凑试过程中,若发现被控质变更缓慢,不克不及尽快达到稳定值,这是由于PB过大或Ti过长引起的,但二者是有区此外:PB过大,曲线漂浮较大,变更不规则,Ti过长,曲线带有振荡分量,接近给定值很缓慢.这样可根据曲线形状来改变PB或Ti.③PB过小,Ti过短,Td太长都会导致振荡衰减得慢,甚至不衰减,其区别是PB过小,振荡周期较短;Ti过短,振荡周期较长;Td太长,振荡周期最短.④如果在整定过程中出现等幅振荡,而且通过改变调节器参数而不克不及消除这一现象时,可以是阀门定位器调校不准,调节阀传动部分有间隙(或调节阀尺寸过大)或节制对象受到等幅动摇的干扰等,都会使被控量出现等幅振荡.这时就不克不及只注意调节器参数的整定,而是要检查与调校其它仪表和环节.(2)衰减曲线法该方法是以4:1衰减作为整定要求的,先切除调节器的积分和微分作用,用凑试法整定纯比例节制作用的比例度PB(比同时凑试二个或三个参数要简单得多),使之符合4:1衰减比例的要求,记下此时的比例度PBs和振荡周期Ts.如果加进积分和微分作用,可按相应的表格给出经历公式停止计算.若按这种方式整定的参数作适当的调整.对有些节制对象,节制过程停止较快,难以从记录曲线上找出衰减比.这时,只要被控量动摇2次就可以达到稳定状态,可近似认为是4:1的衰减过程,其动摇一次时间为Ts.(3)临界比例度法用临界比例度法整定调节器参数时,先要切除积分和微分作用,让节制系统以较大的比例度,在纯比例节制作用下运行,然后逐渐减小PB,每减小一次都要认真观察过程曲线,直到达到等幅振荡时,记下此时的比例度PBk(称为临界比例度)和动摇周期Tk,然后按对应的表给出的经历公式求出调节器的参数值.按该表算出参数值后,要把比例度放在比计算值稍大一点的值上,把Ti和Td放在计算值上,停止现场观察,如果比例度可以减小,再将PB放在计算值上.这种方法简单,应用比较广泛.但对PBk很小的节制系统不适用.(4)反应曲线法前三种整定调节器参数的方法,都是在预先不知道节制对象特性的情况下停止的.如果知道节制对象的特性参数,即时间常数T、时间迟延ξ和放大系数K,则可按经历公式计算出调节器的参数.操纵这种方法整定的成果可达到衰减率φ=0.75的要求 .3.3 临界比例度法在本设计中,我们组采取了临界比例度法来停止PID参数的整定,下面是用临界比例度法整定PID参数的过程在simulink中设计简单的PID节制系统布局图如下:图3-4采取临界比例度法整定PID参数,先切除积分和微分作用,让节制系统以较大的比例度,在纯比例节制作用下运行,然后逐渐减小PB,直到达到等幅振荡时,记下此时的比例系数约为2.45 (称为临界比例度)和动摇周期Tk约为32s,如下图:图3-5然后按对应的表给出的经历公式求出调节器的参数值.仅加入比例环节时,设P为1.225,系统阶跃响应图如下:图3-6由图知系统超调量较小,调节时间为120s左右,但是存在较大的稳态误差为0.3左右,由前面分析欲减小稳态误差需加入积分环节,设P为1.1,Ti为0.0375,此时系统阶跃响应图如下:图3-7由图知加入积分环节后系统的稳态误差大大减小,也验证了其消除误差的作用,但是调节时间加长到约为140s,同时超调量加大近38%,使用PID节制器:图3-8系统稳态误差基本为零,调节时间略有减小,但是超调量接近50%,远远达不到系统动态性能的要求.减小比例系数后发现系统超调量逐渐下降,但是响应速度逐渐减慢,调节时间增加,于是增大微分时间常数以加快响应速度,根据经历法逐步伐整各参数,得基本知足系统动态性能的图形如下:图3-9此时系统各项指标基本使人称心,只是调节时间稍长,为80s 左右.采取临界比例度法得到的PID 参数为:Kd=43.4 PID 参数的确定该节制器采取的是临界比例系数法对PID 参数停止初步整定,然后根据节制的效果,对PID 参数停止调整.最后确定的PID 参数为:四.节制布局在这次设计中,我们首先对系统的传递函数5022()100201s G S e s s -=++停止根轨迹校正和波的图校正,然后采取调整系统节制量的恍惚节制PID 节制方法,对系统的节制器停止分析.4.1 操纵根轨迹校正系统校正前开环系统根轨迹如下:图4-1设定系统校正指标要求为:稳态误差≤0.05,超调量p σ≤15%,s t 20s ≤∆(=0.02),则校正过程如下: MATLAB 中输入如下饬令:>> KK=20;bp=0.15;ts=20;delta=0.02;>> ng0=[2];dg0=[100,20,1];g0=tf(KK*ng0,dg0); ;建立传递函数模子s=bpts2s(bp,ts,delta)s =-0.2034 + 0.3368i ;期望的闭环主导极点>> [ngc,dgc]=rg_lead(KK*ng0,dg0,s); ;根轨迹法求带惯性的PD节制器gc=tf(ngc,dgc)Transfer function:----------------s + 0.5583 ;校正环节传递函数>> g0c=tf(g0*gc);b1=feedback(sys,1);b2=feedback(g0c,1); ;单位负反馈step(b1,'r--',b2,'b');grid on ;校正前后系统的阶跃响应图4-2验算时域性能指标:[pos,tr,ts,tp]=stepchar(b2,delta)从验算成果来看,稳态误差及调节时间达到设计要求,但超调量太大远远不克不及知足要求,需要调整闭环主导极点的位置.检查此时预设的主导极点的阻尼比和无阻尼自然频率: >> [kosi,wn]=s2kw(s)再提高阻尼等到自然频率的值分别为0.99,0.99得闭环极点:>>s=kw2s(0.99,0.99) 再运行PD 节制器设计得: Transfer function: --------------- 阶跃响应图如下:图4-3验算各性能指标:>> [pos,tr,ts,tp]=stepchar(b2,delta) 完全知足设计性能指标要求. 4.2 操纵伯德图校正系统校正指标要求: 40v K ≥,60γ︒=,c 5rad/s ω=,幅值裕度≥15dB .KK=20;Pm=60;wc=5;ng0=KK*[2];dg0=[100,20,1];g0=tf(ng0,dg0);w=logspace(-1,3);[ngc,dgc]=fg_lead_pm_wc(ng0,dg0,Pm,wc,w);gc=tf(ngc,dgc);g0c=tf(g0*gc);b1=feedback(sys,1);b2=feedback(g0c,1);step(b1,'r--',b2,'b');grid onfigure,bode(sys,'r--',g0c,'b',w),grid on校正前后伯德图如下:图4-4得校正前后阶跃响应如下:图4-5调节时间分明减小,响应速度加快.验算各性能指标如下:[gm,pm,wcg,wcp]=margin(g0c)得截止频率为1.33,离设计相差较大,相角裕度为73度也偏大,效果不是太抱负,还需加入二级节制装置.4.3 调整系统节制量的恍惚PID节制方法该节制方法采取的是恍惚节制和PID节制相连系,这类节制器的特点是在大偏差范围内操纵恍惚推理的仿佛调整系统的节制量U,而在偏差范围内转换成PID节制,二者的+ yy r图4-6当switch的输入误差值的相对值≥0.5时,采取恍惚节制;当switch的输入误差值相对值<0.5时,采取PID节制.恍惚节制部分(1)恍惚集及论域定义对误差E、误差变更EC及节制量U的恍惚集及论域定义如下:E、EC和U的恍惚集均为{NB,NM,NS,ZO,PS,PM,PB}E和EC论域均为{-3,-2,-1,0,1,2,3}U的论域为{-4.5,-3,-1.5,0,1.5,3,4.5}E的从属函数图形如下图图4-7EC的从属函数图形如下图图4-8U的从属函数图形如下图图4-9(2)恍惚节制规则恍惚节制规则如下表表4-1NB NM NS O PS PM PBNB NMNSOPSPMPBPSNSNMNBNBNBNBPSPSNSNMNMNBNBPSPSONSNSNMNMPSPSOOONSNSPMPMPSPSONSNSPBPMPMPMPSPSNSPBPBPMPMPMPSNS -(3)恍惚变量的赋值表恍惚变量E的赋值分别如表4-2恍惚变量EC的赋值分别如表4-3恍惚变量U的赋值分别如表4-4得到的恍惚节制器的输出曲面如图图4-104.3.2 PID节制部分PID部分是当输入的|e|<0.5时,主要是节制系统的稳定性.PID参数的主要通过临界比例度法停止整定,然后根据实际的节制效果,停止调节.最后确定的PID参数如下:Kp=0.465五.节制器的设计恍惚节制器的输入为误差和误差变更率:误差e=r-y,误差变更率ec=de/dt,其中r和y分别为液位的给定值和丈量值.把误差和误差变更率的切确值停止恍惚化变成恍惚量E和EC,从而得到误差E和误差变更率EC的恍惚语言集合,然后由E和EC恍惚语言的的子集和恍惚节制规则R(恍惚关系矩阵)根据合成推理规则停止恍惚决议计划,这样便可以得到恍惚节制向量U,最后再把恍惚量解恍惚转换为切确量u,再经D/A转换为摹拟量去节制执行机构动作.图5-1该节制器的特点是在大偏差范围内操纵恍惚推理的方法调整系统的节制量U,可以获得较好的动态性能,反应时间加快.而在小范围偏差范围内转换成PID节制,获得较好的静态性能.从仿真曲线和性能指标可以看出,与惯例的PID 节制相比,恍惚PID节制器能使系统响应的超调减小,反应时间加快.尤其是在系统具有延迟的模子布局和参数不确定的情况下,恍惚PID节制具有更佳的节制效果.本设计采取了Matlab的Simulink工具箱和Fuzzy工具箱停止了系统仿真,其中系统的传递函数为其中Simulink的仿真计算图如下图6-1当只有PID调节,没有加入恍惚节制时的仿真曲线如下:图6-2增加了恍惚节制后的仿真曲线:图6-3增加了随机动态扰动后的仿真曲线:图6-4从上面的图像对比可知,恍惚节制可以使得反应时间加快,分明改善了系统的动态特性.而在增加了随机扰动后,可以看到系统任然可以坚持较好的稳态特性,说明PID节制器在具有较强的抗扰动才能.参考文献[1] 王海英,袁丽英,吴勃. 节制系统的MATLAB仿真与设计. 北京:高等教导出版社,2009.[2] 胡寿松. 自动节制原理.第4版. 北京:迷信出版社.2001.[3] 黄忠霖. 节制系统MATLAB计算及仿真[M].2版. 北京:国防工业出版社,2004.[4] 黄永安. MATLAB7.0/Simulink6.0建仿照真开辟与高级工程应用[M]. 北京:清华大学出版社,2005.[5] 刘卫国. MATLAB程序设计与应用[M].2版. 北京:高等教导出版社,2006.[6] 曹弋. MATLAB 教程及实训[M]. 北京:机械工业出版社,2008.[7] 王正林. 过程节制与Simulink应用[M]. 北京:电子工业出版社,2006.[8] 张国良,曾静等. 恍惚节制及其MATLAB应用. 西安:西安交通大学出版社,2002.[9] 郭阳宽,王正林. 过程节制及仿真:基于MATLAB/Simulink. 北京:电子工业出版社,2009.[10].张井岗. 过程节制与自动化仪表. 北京:北京大学出版社,2007.[11]躠定宇. 节制系统计算机辅助设计—Matlab 语言及应用[M].北京:清华大学出版社,2006[12]刘金琨. 先进PID节制及MATLAB仿真[M].北京:电子工业出版社,2004[13]孙优贤,邵惠鹤. 工业过程节制技术[M]. 北京:化学工业出版社,2006[14]何离庆. 过程节制与装置[M]. 重庆:重庆大学出版社,2003[15]俞金寿,蒋慰孙.过程节制工程[M].第3版.北京:电子工业出版社,2007。
模糊控制在液位控制中的仿真应用设计
吉林化工学院毕业设计模糊控制在液位控制中的仿真应用设计Simulation Design Based on Fuzzy Controller in Liquid LevelControl学生学号:09510441学生姓名:霍可栋专业班级:自动0904指导教师:吕春兰职称:副教授起止日期:2013.03.04~2013.06.23吉林化工学院Jilin Institute of Chemical Technology摘要本次设计主要论述了应用模糊控制理论控制水箱液位,详尽的介绍模糊控制理论的相关知识,提出水箱液位模糊控制的方案,建立基于水箱水位的数学模型并用MATLAB进行仿真设计。
首先根据双容水箱的系统结构,通过计算得到数学模型的传递函数;然后利用Matlab 工具箱设计模糊控制器,具体包括以下三步:(1)确定模糊控制器的结构;(2)输入输出的模糊化;(3)模糊推理决策算法设计;最后分别用常规PID控制与模糊控制对双容水箱系统仿真。
通过常规PID控制与模糊控制仿真结果的对比,我们能看出模糊控制较传统的PID控制来讲具有响应速度快、适应性较强,即鲁棒性好、超调量小稳定时间较长等优点,显示出很强的抗干扰性能。
关键词:水位控制;模糊控制器;模糊规则; FISAbstractThis paper is primarily on the applied fuzzy control theory control level in the reservoir system, first introduced in detail the fuzzy control theory of knowledge, and Then put forward to realize the control of the water level in the water tank scheme using fuzzy theory,finally simulation design of mathematical model of fuzzy controller with MATLAB based on the water tank water level .Firstly, according to the system structure of double tank, transfer function is obtained through the calculation of mathematical model. Then use the Matlab toolbox to design the fuzzy controller, including the following three steps: (1)Determine the structure of fuzzy controller;(2)Fuzzy input and output; (3)Design of fuzzy reasoning and decision algorithms. Finally, by using the MATLAB fuzzy logic toolbox and SIMULINK combination function,Compare the simulation result of conventional PID control and fuzzy control for dual-tank system.By contrast to conventional PID control and fuzzy control simulation results, we can see the fuzzy control over the conventional PID control with fast response, strong adaptability, robustness, and overshoot advantages of a small stable for a long time, showing the expected good steady performance.Key Words:Level control; Fuzzy controller; Fuzzy rules; FIS目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 模糊控制水箱水位系统概述 (1)1.2 模糊控制理论简介 (1)1.2.1 模糊控制理论的产生、发展及现状 (1)1.2.2 模糊控制理论运用于水箱水位系统控制的意义 (2)1.3 仿真建模工具软件MATLAB/SIMULINK简介 (2)1.4 本文的主要任务及内容安排 (4)第二章模糊理论及模糊控制基础 (6)2.1模糊理论基础 (6)2.1.1 从经典集合到模糊集合的转变 (6)2.1.2 模糊集合的基本概念 (8)2.1.3 模糊集合的基本运算 (11)2.2 模糊控制的基础知识 (13)2.2.1 模糊控制的一般概念 (14)2.2.2 模糊控制的回顾和展望 (15)2.2.3 模糊控制系统的结构 (15)2.3 本章小结 (20)第三章水箱水位模糊控制器的建立 (22)3.1 双容水箱的动态分析与建模 (22)3.2Matlab下模糊控制器的设计 (24)3.2.1 确定模糊控制器的结构 (24)3.2.2 输入输出的模糊化 (25)3.2.3 模糊推理决策算法设计 (26)3.3 本章小结 (29)第四章利用MATLAB对水箱水位系统进行仿真建模 (30)4.1 水箱水位模糊推理系统(FIS)的建立 (30)4.2 模糊规则的建立 (32)4.3 对SIMULINK模型控制系统的构建 (35)4.4Matlab对水箱液位的仿真设计 (36)4.4.1 常规PID对液位模型的仿真 (36)4.4.2 模糊控制对液位模型的仿真 (37)4.4.3 混合式模糊控制对液位的仿真 (38)4.4.4 干扰后常规PID与模糊控制仿真对比 (39)4.5 本章小结 (40)结论 (42)参考文献 (43)致谢 (44)第一章绪论1.1 模糊控制水箱水位系统概述在能源、化工等多个领域中普遍存在着各类液位控制系统,各种控制方式在液位控制系统中也层出不穷,如较常用的浮子式、磁电式和接近开关式。
双容水箱的模糊PID控制

双容水箱液位模糊串级控制系统的设计与MATLAB仿真薛松柏11.宿迁学院机电工程系,09自动化1班,20090704140摘要:液位控制是工业控制中的一个重要问题,针对液位控制过程中存在大滞后、时变、非线性的特点,为适应复杂系统的控制要求,人们研制了种类繁多的先进的智能控制器,模糊PID 控制器便是其中之一。
模糊PID控制结合了PID控制算法和模糊控制方法的优点,可以在线实现PID参数的调整,使控制系统的响应速度快,过渡过程时间大大缩短,超调量减少,振荡次数少,具有较强的鲁棒性和稳定性,在模糊控制中扮演着十分重要的角色。
本文先对双容水箱进行数学建模,将模糊控制和PID控制相结合,设计出了双容水箱液位模糊PID串级控制系统。
然后参照经验选取了合适的模糊控制规则和隶属度函数,设计了模糊控制器,建立了模糊控制表,供在线模糊控制查询使用。
最后应用MATLAB对双容水箱液位控制对象的常规PID串级控制系统和模糊PID串级控制系统进行了仿真比较,说明了模糊PID串级控制系统相对于常规PID串级控制系统,对于此设计具有明显的优越性。
关键字:PID控制;模糊控制;模糊PID串级控制;MATLAB仿真0 引言双容水箱液位控制系统,由于阀门的非线性、传输管道的纯滞后,用常规的PID控制不能取得满意的控制效果,而且双容水箱理论上的数学模型是很难建立的,所以用常规的PID控制更难取得满意的控制效果。
为此将模糊控制引入到双容水箱液位控制系统中来,根据人工控制的经验总结模糊控制的规律,用模糊控制和PID控制对双容水箱进行串级控制,可以取得满意的控制效果。
本文设计了双容水箱液位的模糊PID串级控制,用模糊控制和PID控制组成的双容水箱液位串级控制系统通过控制双容水箱的下液位,改善其控制性能,并借助MATLAB进行仿真,比较常规PID串级控制和模糊PID串级控制的性能。
1 双容水箱液位系统的组成双容水箱串级液位控制系统结构图如图 2.1所示。
基于MATLAB的液位模糊控制系统设计
基于MATLAB的液位模糊控制系统设计
丁肇红
【期刊名称】《上海应用技术学院学报(自然科学版)》
【年(卷),期】2009(009)004
【摘要】对水箱系统设计一个两维模糊控制器,模糊控制器设计为两个输入一个输出,模糊控制器的输出用来控制阀门的开度,调节水箱的液位.运用MATLAB模糊工具箱实现双输入单输出的模糊控制器,并结合Simulink仿真得到实际液位跟踪给定液位的曲线,仿真结果证实该模糊控制器优越于常规的PID控制器,水箱模糊控制系统获得良好的控制性能指标.
【总页数】4页(P258-260,270)
【作者】丁肇红
【作者单位】上海应用技术学院机械与自动化工程学院,上海,200235
【正文语种】中文
【中图分类】TP273.4
【相关文献】
1.基于MATLAB的结晶器液位模糊控制器的设计与仿真 [J], 刘建新;谌海霞
2.基于组态王与MATLAB的双容水箱液位模糊控制系统 [J], 王维权;马阳;雷彦华;禢太行;李海荣
3.基于ControX2000和MATLAB的液位模糊控制系统 [J], 王贞卫;陈华
4.基于现场总线的双容液位模糊控制系统设计 [J], 李微;邵志勇;李媛
5.基于参数自整定的双容液位模糊控制系统设计 [J], 吴兴纯;杨燕云;吴瑞武;杨秀莲
因版权原因,仅展示原文概要,查看原文内容请购买。
智能控制及MATLAB实现—水箱液位模糊控制仿真设计

智能控制及MATLAB实现—水箱液位模糊控制仿真设计智能控制是一种利用先进的智能技术和算法来实现自动控制的方法。
在智能控制中,模糊控制是一种常见且有效的方法之一、模糊控制通过将模糊逻辑应用于控制系统中的输入和输出,根据模糊规则来进行决策和控制。
水箱液位控制是一个典型的控制问题,常常用于工业和民用领域中的自动化系统。
在许多控制应用中,水箱液位的控制是一个关键的问题,因为它需要根据系统的液位情况来实现稳定的控制。
在模糊控制中,首先需要建立一套模糊规则系统,该系统包括模糊化、模糊推理和解模糊化这三个步骤。
模糊化是将实际输入转换为模糊集合的过程。
在水箱液位控制中,可以将液位分为低、中和高三个模糊集合。
通过将实际液位值映射到这些模糊集合中的一个,来表示液位状态。
模糊推理是根据一组模糊规则,将模糊输入转换为模糊输出的过程。
通过将输入和规则进行匹配,确定输出的模糊集合。
在水箱液位控制中,可以使用如下规则:如果液位低且液位变化小,则控制信号为增大水流量;如果液位高且液位变化大,则控制信号为减小水流量;如果液位中等且液位变化适中,则控制信号为不变。
解模糊化是将模糊输出转换为实际的控制信号的过程。
在水箱液位控制中,可以使用模糊加权平均值的方法来进行解模糊化。
通过将模糊集合和其对应的权重进行加权平均计算,得到最终的控制信号。
在MATLAB中,可以使用Fuzzy Logic Toolbox来实现水箱液位模糊控制仿真设计。
首先需要建立输入和输出的模糊化和解模糊化函数,然后根据实际的模糊规则,构建模糊系统。
最后通过设定输入的模糊值,使用模糊系统进行推理和解模糊,得到最终的控制信号。
总结起来,智能控制及MATLAB实现水箱液位模糊控制仿真设计包括建立模糊规则系统,进行模糊化、模糊推理和解模糊化三个步骤,通过Fuzzy Logic Toolbox来实现模糊控制系统的构建和仿真。
通过利用模糊控制的方法,可以实现水箱液位的自动稳定控制,并提高了控制系统的鲁棒性和适应性。
基于双模糊控制器的水箱液位控制
基于双模糊控制器的水箱液位控制周妮娜【摘要】针对工业锅炉自动控制系统中的水箱系统液位控制问题,提出基于模糊控制器的基础上,设计实现一种双模糊控制器.根据输出信号的误差大小分别利用两个模糊控制器进行控制,控制结果传递给调节器,以实现水箱水位不变.从仿真结果来看,双模糊控制器有效地减小了系统稳态误差,响应时间、超调量、稳定时间等性能优于传统的PID控制.%In order to solve the question of liquid level control in boiler system, a new kind of double fuzzy controller is designed in this paper. Two fuzzy controllers were used separately according to actual error signal of the system output, the output was transferred to adjuster for a constant liquid level. Compared with normal PID controller and fuzzy controller, the results show that the double fuzzy controller can reduce steady-state error of the plant, other characteristic such as settlingtime,speed of response and overshoot are also prior to normal PID controller.【期刊名称】《现代电子技术》【年(卷),期】2011(034)006【总页数】2页(P140-141)【关键词】双模糊控制器;水箱;液位控制;调节器【作者】周妮娜【作者单位】宝鸡文理学院电气系,陕西,宝鸡,721013【正文语种】中文【中图分类】TN911-34;TP273.40 引言对于典型工业系统的控制,很多专家和学者都应用模糊控制实现了对复杂系统的设计和仿真,如曾鸣等人应用双模糊控制器实现对车辆半主动悬架控制[1];周妮娜应用于模糊控制器实现对锅炉除氧系统的控制[2-3];张松兰等人设计了锅炉汽包水位模糊自适应控制策略[4]等。
基于MATLAB的双容水箱液位控制系统设计

基于MATLAB的双容水箱液位控制系统设计摘要:本文基于MATLAB,设计了一个双容水箱液位控制系统。
首先,介绍了控制系统的背景和目标。
然后,系统的数学模型被建立,并通过MATLAB进行了模拟。
接下来,设计了控制器和观测器,并进行了系统的闭环控制。
最后,通过实验验证了系统性能的有效性。
1.引言水箱液位控制是许多工业和民用领域常见的问题之一、传统的液位控制方法通常有许多局限性,例如精度不高、控制响应慢等。
因此,设计一种高性能的液位控制系统对实际应用非常重要。
本文基于MATLAB,设计了一种双容水箱液位控制系统,旨在提高控制精度和响应速度。
2.系统建模首先,建立了双容水箱的数学模型。
假设水箱内的水可以视为不可压缩和不可挤压的流体,使用连续性方程和质量平衡方程来描述液位的变化。
然后,使用传感器和反馈控制器来测量和控制液位。
最后,利用MATLAB进行模拟,验证了该数学模型的准确性。
3.控制器设计为了提高系统的控制性能,设计了一个PID控制器。
PID控制器包括比例、积分和微分三个部分,分别用于校正偏差、消除静差和抑制振荡。
通过调整PID的参数,优化了系统的控制性能。
4.观测器设计为了实时监测液位变化,设计了一个观测器。
观测器根据已知的控制输入和输出,估计状态变量的值。
在双容水箱液位控制系统中,使用了一种基于卡尔曼滤波器的观测器,为系统提供了准确的状态估计。
5.闭环控制将控制器和观测器与水箱液位控制系统相结合,形成一个闭环控制系统。
通过控制器的输出控制水泵的速度,实现对液位的控制。
通过观测器的输出估计液位的值,为控制器提供准确的反馈。
6.实验验证通过实验验证了设计的双容水箱液位控制系统的有效性。
将系统置于实际工作环境中,测量液位的变化,并与理论模型进行比较。
实验结果表明,该系统具有良好的控制性能和响应速度。
7.结论本文基于MATLAB,设计了一个双容水箱液位控制系统。
通过系统建模、控制器设计和观测器设计,实现了对液位的精确控制。
智能控制及MATLAB实现—水箱液位模糊控制仿真设计

水箱水位模糊控制系统设计一.在MATLAB命令窗口中输入sltank,便可打开如图所示的模型窗口。
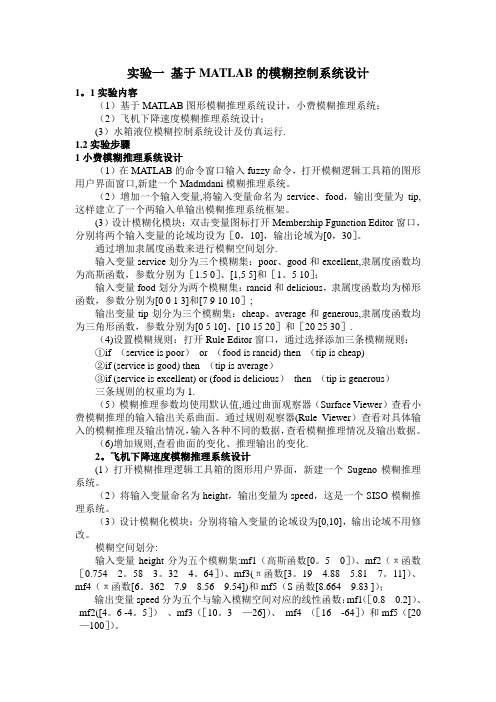
图1 sltank仿真图(1)打开MATLAB,输入指令fuzzy,打开模糊逻辑工具箱的图形用户界面窗口,新建一个Mamdani模糊推理系统。
(2)增加一个输入变量,将输入变量命名为水位误差、误差变化,将输出变量命名为阀门开关速度。
这样就建立了一个两输入单输出的模糊推理系统,保存为shuiwei1。
图2 增加一个输入变量(3)设计模糊化模块;设水位误差level的论域为[2、95 3、05],误差变化率rate的论域为[-0、2 0、2];两个输入量的模糊集为level设为为7个,rate设为5个:其中水位误差level定为NB、NM、NS、ZE、PS、PM、PB;参数分别为[0、01 2、95]、[0、01 2、97],[0、01 2、99]、[0、01 3]、[0、01 3、01]、[0、01 3、03]、[0、01 3、05],隶属度均为高斯函数;图3 输入量level的参数设定误差变化率rate分别为负大,负小,不变,正小,正大。
参数分别为,[0、03 -0、2]、[0、03 -0、1]、[0、03 0]、[0、03 0、1]、[0、03 -0、2],隶属度函数均为高斯函数。
图4 误差变化率rate的参数设定阀门的开关速度设为七个等级:快关,中关,慢关,不动,慢开,中开,快开,其论域为[2、95 3、05]。
参数分别为;[2、94 2、95 2、96]、[2、965 2、97 2、975]、[2、99 2、99 2、995]、[2、999 3 3、001]、[3、005 3、01 3、015]、[3、02 3、03 3、035]、[3、04 3、05 3、06],隶属函数为三角形函数。
图5 输出量valve的参数设定(4)设计模糊规则打开Ruel Editor窗口,通过选择添加模糊规则;1)If (level is NB) and (rate is 负大) then (valve is 快关) (1)2)If (level is NB) and (rate is 负小) then (valve is 快关) (1) 3)If (level is NB) and (rate is 不变) then (valve is 快关) (1) 4)If (level is NB) and (rate is 正小) then (valve is 中关) (1)5)If (level is NB) and (rate is 正大) then (valve is 不动) (1) 6)If (level is NM) and (rate is 负大) then (valve is 快关) (1) 7)If (level is NM) and (rate is 负小) then (valve is 快关) (1) 8)If (level is NM) and (rate is 不变) then (valve is 快关) (1) 9)If (level is NM) and (rate is 正小) then (valve is 中关) (1)10)If (level is NM) and (rate is 正大) then (valve is 不动) (1) 11)If (level is NS) and (rate is 负大) then (valve is 中关) (1) 12)If (level is NS) and (rate is 负小) then (valve is 中关) (1) 13)If (level is NS) and (rate is 不变) then (valve is 中关) (1) 14)If (level is NS) and (rate is 正小) then (valve is 不动) (1) 15)If (level is NS) and (rate is 正大) then (valve is 慢开) (1) 16)If (level is ZE) and (rate is 负大) then (valve is 中关) (1) 17)If (level is ZE) and (rate is 负小) then (valve is 慢关) (1) 18)If (level is ZE) and (rate is 不变) then (valve is 不动) (1)19)If (level is ZE) and (rate is 正小) then (valve is 慢开) (1) 20)If (level is ZE) and (rate is 正大) then (valve is 中开) (1) 21)If (level is PS) and (rate is 负大) then (valve is 慢关) (1) 22)If (level is PS) and (rate is 负小) then (valve is 不动) (1) 23)If (level is PS) and (rate is 不变) then (valve is 中开) (1) 24)If (level is PS) and (rate is 正小) then (valve is 中开) (1) 25)If (level is PS) and (rate is 正大) then (valve is 中开) (1) 26)If (level is PM) and (rate is 负大) then (valve is 不动) (1) 27)If (level is PM) and (rate is 负小) then (valve is 中开) (1) 28)If (level is PM) and (rate is 不变) then (valve is 快开) (1) 29)If (level is PM) and (rate is 正小) then (valve is 快开) (1) 30)If (level is PM) and (rate is 正大) then (valve is 快开) (1) 31)If (level is PB) and (rate is 负大) then (valve is 不动) (1) 32)If (level is PB) and (rate is 负小) then (valve is 中开) (1) 33)If (level is PB) and (rate is 不变) then (valve is 快开) (1) 34)If (level is PB) and (rate is 正小) then (valve is 快开) (1) 35)If (level is PB) and (rate is 正大) then (valve is 快开) (1) 这35条模糊控制规则的权重都为1、图6 模糊控制规则的设定(5)利用编辑器的 to Workspace, 将当前的模糊推理系统,以shuiwei1保存到工作空间中。
基于MATLAB的模糊控制系统设计
实验一基于MATLAB的模糊控制系统设计1。
1实验内容(1)基于MATLAB图形模糊推理系统设计,小费模糊推理系统;(2)飞机下降速度模糊推理系统设计;(3)水箱液位模糊控制系统设计及仿真运行.1.2实验步骤1小费模糊推理系统设计(1)在MATLAB的命令窗口输入fuzzy命令,打开模糊逻辑工具箱的图形用户界面窗口,新建一个Madmdani模糊推理系统。
(2)增加一个输入变量,将输入变量命名为service、food,输出变量为tip,这样建立了一个两输入单输出模糊推理系统框架。
(3)设计模糊化模块:双击变量图标打开Membership Fgunction Editor窗口,分别将两个输入变量的论域均设为[0,10],输出论域为[0,30]。
通过增加隶属度函数来进行模糊空间划分.输入变量service划分为三个模糊集:poor、good和excellent,隶属度函数均为高斯函数,参数分别为[1.5 0]、[1,5 5]和[1。
5 10];输入变量food划分为两个模糊集:rancid和delicious,隶属度函数均为梯形函数,参数分别为[0 0 1 3]和[7 9 10 10];输出变量tip划分为三个模糊集:cheap、average和generous,隶属度函数均为三角形函数,参数分别为[0 5 10]、[10 15 20]和[20 25 30].(4)设置模糊规则:打开Rule Editor窗口,通过选择添加三条模糊规则:①if (service is poor)or (food is rancid) then (tip is cheap)②if (service is good) then (tip is average)③if (service is excellent) or (food is delicious)then (tip is generous)三条规则的权重均为1.(5)模糊推理参数均使用默认值,通过曲面观察器(Surface Viewer)查看小费模糊推理的输入输出关系曲面。
神经网络在双容水箱液位控制系统中的应用_毕业论文 精品
神经网络在双容水箱液位控制系统中的应用摘要本文主要介绍了神经网络在双容水箱液位控制系统中的应用。
将传统的PID控制方法、BP神经网络控制方法和神经网络PID控制方法进行对比,通过对动态性能指标的分析可以得出神经网络PID控制在双容水箱液位控制系统中可取得较好的控制效果这一结论。
液位控制系统是典型的大滞后、非线性、强耦合的复杂控制系统。
随着现代工业的发展,在某些化学工业以及能源产业越来越多的应用到液位控制系统。
神经网络控制技术作为控制领域的一个分支学科为解决复杂的具有非线性特点或是不确定、不确知的系统开辟了一条崭新的途径。
本文首先对双容水箱液位控制系统的应用及其常用控制方案进行了介绍,根据其结构图建立数学模型,得到传递函数。
根据它的传递函数,建立普通PID控制器、BP神经网络控制器和神经网络的PID控制器,对控制方案进行模拟及仿真获得数据比较分析后得出三种控制方法中神经网络控制在双容水箱液位控制系统中可取得较好控制效果的结论。
关键字双容水箱,PID控制器,BP神经网络,神经网络控制器ABSTRACTThe application of the neural network control theory to the dual -tank water level control system be introduced in this pared with the traditional PID controller ,BP neural network controller and neural network PID controller, come to some advantage the neural network PID controller in the control the dual -tank water level system.The tank level control system is a typically large time-delay, non-linear and coupling lag complicated controlsystem.With the development of modern industry, some of the chemical industry and the energy industry use the tank level control system more and more. Neural network control is a branch of automatic control, it has opened up a new way to solve the problem of complex non-linear, uncertain, unascertained system.In this paper I firstly introduces dual -tank water level control system and the method of control it, then establishes its mathematical model and obtain pipeline. Based on pipeline, the author establishes ordinary PID controller, BP neural network controller and the neural network PID controller. By emulating and imitating control scheme, the data is obtained. Through comparing and analyzing the data, this paper will reach the conclusion that, in three control methods, neural network control has the superiority in the dual- tank water level control system.Key Words:Dual -tank water ,PID controller ,BP neural network ,Neural network controller目录1.绪论 (1)1.1双容水箱的实际应用 (1)1.2水箱液位的控制方法 (2)2.双容水箱模型简介 (3)2.1立体背景 (3)2.2数学模型的建立 (3)2.3特性分析 .......................................... 错误!未定义书签。
-基于MATLAB的双容水箱液位的模糊神经控制

自 1932 年奈魁斯特(H.Nyquist)的有关反馈放大器稳定性论文发表以来,控制理 论的发展已走过了近 80 年的历程。前 30 年是经典控制理论的发展和成熟阶段,后 50 年是现代控制理论的形成和发展阶段。随着研究的对象和系统越来越复杂,借助 于数学模型描述和分析的传统控制理论已难以解决复杂系统的控制问题。智能控制是 针对控制对象及其环境、目标和任务的不确定性和复杂性而产生和发展起来的。从 20 世纪 60 年代起,计算机技术和人工智能技术迅速发展,为了提高控制系统的自主 学习能力,人工智能技术被学者们提出并广泛应用于控制系统。1965 年,美籍华裔 科学家傅京孙教授首先把人工智能的启发式推理规则用于学习控制系统;1966 年,
2 系统建模与 MATLAB 环境 ......................................................................................4 2.1 过程控制系统的建模方法..................................................................................4 2.1.1 机理法 ...........................................................................................................4 2.1.2 测试法 ...........................................................................................................4 2.2 双容水箱液位控制系统的建模..........................................................................4 2.3 MATLAB 环境及 Simulink 模型 .......................................................................8 2.3.1 MATLAB 软件简介 .....................................................................................8 2.3.2 Simulink 模型................................................................................................8
基于MATLAB的双容水箱液位ppt
1.2智能控制 1.2.1智能控制的产生及研究现
状
从20世纪60年代起,计算机技术和人工智能 技术迅速发展,为了提高控制系统的自主学 习能力,人工智能技术被学者们提出并广泛 应用于控制系统。1965年,美籍华裔科学家 傅京孙教授首先把人工智能的启发式推理 规则用于学习控制系统;1966年,Mendel进一 步在空间飞行器的学习控制系统中应用了 人工智能技术,并提出了“人工智能控制” 的概念
-
2.2双容水箱液位控制系统的建 模
双容水箱实际被控对象如图2.1所示,为单入单出二阶最小相位过程控
。 制系统,具有非线性特性。其过程示意图如图2.2所示
-
图2.2 双容水箱模型图
-
在双容水箱液位控制系统中,输入量为容器1的入 水流量,正比于水菜的输入电压,连续可调且有界;输 出量(即被控量)为容器2中的液位高度。现在,采用 机理法对双容水箱液位控制系统进行数学建模。
-
因此,它带有明显人类智能思维的特征。然 而,模糊控制也存在一个缺陷,即是没有一种 良好的学习架构和方法。神经网络是基于 人类神经网络解剖的基础上的,它描述的是 人类神经刚络传递、处理信息的微观过程。 神经网络控制主要特点如下:可以充分逼近 任意复杂的非线性关系;所有定量或定性的 信息都等势分布C:存于网络内的各神经元, 故有很强的鲁棒性和容错性;采用并行分布 处理方法,使得快速进行大量运算成为可能; 可学习和自适应不知道或不确定的系统;能 够同时处理定量、定-性知识。便于给出工
控制理论从形成发展至今,己经经历多年的 历程,大致可分为三个阶段:第一阶段以上世 纪40年代时兴起的调节原理作为标志,称为 经典控制理论阶段;第二阶段以60年代时兴 起的状态空间法作为标志,称为现代控制理 论阶段;第三阶段则是80年代时兴起的智能 控制理论阶段。傅京孙在1971年指出,为了 解决智能控制的问题,将人工智能技术中较 少依赖模型的问题的求解方法与常规的控 制方法相结合;Saridis在学习控制系统研究
水箱液位控制器matlab
figure(1); plotfis(a2); figure(2); plotmf(a,'input',1); figure(3); plotmf(a,'output',1);
showrule(a); ruleview('tank');
for i=1:1:7 e(i)=i-4; Ulist(i)=evalfis([e(i)],a2);
end Ulist = round(Ulist);
disp('------------------------------------------------------'); disp('----------模糊控制表:e =[-3,3], u = [-4,4]-----------'); disp('------------------------------------------------------'); fprintf('| a |'); fprintf(' %d |',e); fprintf('\n'); fprintf('| u |'); fprintf(' %d |',Ulist); fprintf('\n');
基于MATLAB的水箱水位模糊控制
目录前言1.模糊控制概述模糊控制的产生及特点 (3)模糊控制技术的发展 (4)模糊控制理论的研究现状 (5)2.模糊推理原理模糊控制的基本工作原理 (6)3.基于MATLAB的水箱供水模糊控制水箱水位模糊控制系统设计 (8)小结............ ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・16参考文献 (17)-•、—1—冃IJ §随着社会经济的迅速发展,水对人们生活与工业生产的影响越来越重要,尤其是近儿年,随着居民生活水平的显著提高和城市化进程的加快,居民生活用水和工业用水增长幅度加大,原有的供水系统已经不能满足人们的需求。
为了保证正常的供水,这里应用模糊控制技术,实现对水箱水位的自动控制。
3、基于MATLAB的水箱供水模糊控制水箱水位模糊控制系统设计本系统设计基于MATLAB图形模糊推理系统,设计步骤如下:(1)打开MATLAB,输入指令fuzzy,打开模糊逻辑工具箱的图形用户界面窗口,新建一个Mamdani模糊推理系统。
图FIS Editor窗口中新建水位控制模糊推理系统(2)增加一个输入变量,将输入变量命名为水位误差、误差变化,将输出变量命名为阀门开关速度。
这样就建立了一个两输入单输出的模糊推理系统,保存为。
图增加一个输入变量(3) 设计模糊化模块:设水位误差的论域为[-1 1],误差变化 的论域为[];两个输入量的模糊集都定为5个:其中水位误差定为高、偏 高、合适、偏低、低五等;参数分别为[-1]、[ ]、[0]、[]、 [1]; Current Varidbte Nome Tpqe £yVcm ^huiMono : 2 inpdts, 1 oulpU z ord 24 ruleI rrin I max ceriroid rnn And method Or methodImplicationAggregalbn Dcfuzzficotion input (11) |水位魅 FIS Name: shuxiara FIS Tvpe: maiidcniCloseRange图设汁水位误差模块误差变化分为大、偏大、合适、偏小、小五等。
水箱液面模糊控制及Matlab仿真实现
!"#$
图 " 模糊控制系统结构图
由 图 " 可 知< 要 想 实 现 控 制 目 标< 关 键 在 于 以 下 的三个 步骤 < 即输入 变 量 的 模 糊 化 < 模 糊 关 系 矩 阵 的 获取 < 模糊结果的获 得 以 及 其 输 出 的 去 模 糊 化 D 模 糊 控制系统首先将输入量 M 和 !M 经过模糊化处理< 然 后送到模糊推理环节进行推理 < 推理后得出的输出模 糊量再进行精确化处理 < 最后输出到控制执行环节中 控制被控对象 % 根 据 模 拟 的 实 际 情 况 及 要 求 水 箱 液 面 在 HDICJ "DKC 内波动 < 理想的状态是 "D%C< 易知液面偏差 M 的 基本论域为 PJHDI< HDIQ< 量化为 PJR JS J% J" H " % S RQ T 个 等 级 < 定 义 L 个 模 糊 语 言 变 量 U V 正 大 VNW’XY< V 正 小 V!W’WZ< V 零V!W[MZ< V 负小V!W\WZ< V负大 V!W\XZD
基于MATLAB的液位模糊控制系统设计
传统控制方法均是建立在被控对象的精确数 学模型 之上的 , 随着系统复 杂程度的提高 , 将 难以建立系统的精确数学模型和满足实时控制的 要求。在实际工业生产中, 很多系统的影响因素 很多, 十分复杂。大多数实际系统都是非线性的, 建立精确的数学模型特别困难。双容对象受到扰 动后, 被控参数 ( 液面高度 ) 的变化速度并不是一 开始就最大 , 而是要经过一段时间之后才能达到 最大值。双容对象的数学模型是非线性的, 由于 建立的液位对象模型不够精确 , 采用此模型整定
中图分类号 : TP 273 . 4
Design of Level Fuzzy Control System Based on MATLAB
D ING Z ha o hon g
( School ofM echanica l and Autom ation Eng ineer ing, Shangha i Institute of Techno logy , Shangha i 200235 , China)
图 1 水箱模糊控制系统示意图
图 4 输出量 p 的隶属度函数
中位水箱系统的模糊控制器设计为两个输入 一个输出, 一个输入为水箱的液位给定值与实际液 位 H 的误差 e, 另一个输入为误差 e 的变化率 de。 模糊控制器的输出是阀门开度 p, 阀门开度间接控 制容器的水位高度, 从而达到调节水箱的液位高 度。图 2所示为液位模糊控制系统框图。
论本文通过对中位水箱系统液位偏差和液位偏差的变化率进行模糊化处理利用控制经验知识建立了两位液位模糊控制规则再通过反模糊化输出改变调节阀的开度来改变水箱的液位高度达到用两维模糊控制器的方法来控制水箱系统的液位高度同时将模糊控制器和pid控制器比较仿真运行结果表明了水箱模糊控制系统获得更好的控制性能指标
基于MATLAB的水箱水位模糊控制系统的设计
基于MATLAB的水箱水位模糊控制系统的设计
刘新;唐雪梅
【期刊名称】《微计算机信息》
【年(卷),期】2010(026)031
【摘要】本文利用模糊控制理论设计出一套水箱水位模糊控制器系统,具体给出了系统设计方案,并应用MATLAB软件对该控制系统进行验证.仿真结果表明该系统取得了良好的预期效果,有效的提高了水位控制的精度.
【总页数】2页(P43-44)
【作者】刘新;唐雪梅
【作者单位】430080,武汉工程职业技术学院;430074,武汉科技学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于WinCC和MATLAB的水位模糊控制系统设计 [J], 朱建军
2.基于PLC水箱水位模糊控制系统的分析与设计 [J], 赵瑞林
3.基于模糊模式的水箱水位控制系统 [J], 王建珍
4.基于组态王与MATLAB的双容水箱液位模糊控制系统 [J], 王维权;马阳;雷彦华;禢太行;李海荣
5.基于组态软件和MATLAB的水位模糊控制系统 [J], 孙勇智;于海蓉
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目 双容水箱液位的模糊神经控制
学生姓名 教学院系 专业年级
学号 电气信息学院 自动化 20 级
指导教师
完成日期
2014 年 3 月 19 日
摘要
传统的控制理论如 PID 及其改进的控制方法可以实现对一些简单系统的控 制。然而在控制复杂或难以精确描述的控制系统时它们往往不能表现出良好的控 制效果。智能控制理论的提出有效解决了这一问题。目前,智能控制己经作为一 门独立的学科,iH 式在国际上建立起来,并被控制领域里的学者们广泛研究。 本文以双容水箱液位控制系统(存在大惯性滞后环节复杂控制系统的典型代表) 作为研究对象。首先,通过机理法分析并建立了系统的数学模型,得出控制系统 的传递函数;其次,详细论述了 PID 控制思想、模糊控制思想及神经网络控制 思想的相关理论及应用现状。并通过 MATLAB 中的 Simulink 模型,采用 PID 控 制、模糊控制及神经网络预测控制的方法对系统进行仿真。最后,通过对比三种 控制方法的控制仿真曲线,直观地得出结论。从而验证智能控制思想在复杂控制 系统中的应用价值。智能控制系统具有更加优秀的性能,具体表现为:系统超调 量小、调节时间短、容错能力及抗干扰能力强,表现出良好的鲁棒性。随着人工 智能技术、计算机技术的迅速发展,智能控制及其算法的研究与应用越来越成为 学术界所关注的热点问题,智能控制也必将迎来它的发展新时期。
1
自动化 2010 级综合实践
Mendel 进一步在空间飞行器的学习控制系统中应用了人工智能技术,并提出了“人工 智能控制”的概念;1967 年,Leondes 和 Mendel 首先 JH 式使用“智能控制”一词。20 世纪 70 年代初,傅京孙、GlofisO 和 Saridis 等学者从控制论角度出发,将人工智能 技术与自适 1 北方工业大学硕士学位论文应、自学习控制的关系进行了总结,认为智 能控制是人工智能技术与控制理论的交叉,并创立人机交互式分级递阶的智能控制系 统结构。20 世纪 70 年代中期,以模糊集合论为基础,智能控制在规则控制研究上取 得了重要进展。1974 年,Mamdani 提出了基于模糊语言描述控制规则的模糊控制器, 将模糊集和模糊语言逻辑用于工业过程控制,之后又成功开发出自组织模糊控制器, 这使模糊控制器的智能水平得到较大提高。模糊控制的产生、发展及其与人工智能的 相互渗透,对智能控制理论的形成起了十分重要的推动作用。20 世纪 80 年代,专家 系统技术的逐渐成熟及计算机技术的迅速发展,使得智能控制和决策的研究也取得了 较大进展。1986 年,KJ.Astrom 发表的著名论文《专家控制》中,将人工智能中的专 家系统技术引入控制系统,组成了另一种类型的智能控制系统——专家控制。目前, 专家控制方法已有许多成功应用的实例。
I
双容水箱液位的模糊神经控制
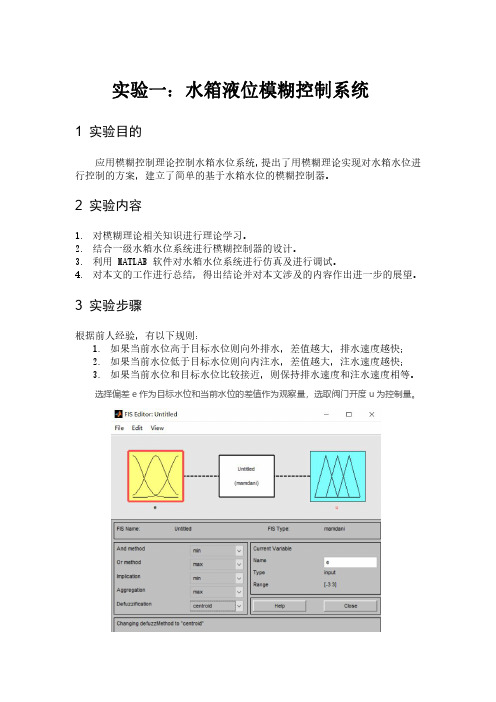
1 引言
1.1 研究背景
传统控制领域中的系统动态模式是否精确直接关系到控制效果的优劣,即系统的 动态信息越详细便越能达到精确控制的目的。传统的控制算法应用于明确系统有着强 而有力的控制能力如:采用 PID 及其相应改进算法可以实现对一些简車系统的控制。 其特点在于方便实现对被控对象的控制,并不要求很高的控制精度。而复杂或者难以 精确描述的控制系统的变量较多,难以准确描述系统的动态。因此我们利用各种方法 简化系统动态实现控制,但效果往往不尽人意。模糊控制在模糊逻辑中应用最为广泛。 模糊控制器是一种引入隶属度的概念,用条件语句表述控制规则从而实现控制的非线 性控制器。因此,它带有明显人类智能思维的特征。然而,模糊控制也存在一个缺陷, 即是没有一种良好的学习架构和方法。神经网络是基于人类神经网络解剖的基础上 的,它描述的是人类神经刚络传递、处理信息的微观过程。神经网络控制主要特点如 下:可以充分逼近任意复杂的非线性关系;所有定量或定性的信息都等势分布 C:存 于网络内的各神经元,故有很强的鲁棒性和容错性;采用并行分布处理方法,使得快 速进行大量运算成为可能;可学习和自适应不知道或不确定的系统;能够同时处理定 量、定性知识。便于给出工程上易于实现的学习算法。因此,引入神经网络的概念, 基于神经网络研究各种先进控制算法,越来越成为解决控制复杂控制系统的必要途 径。 1.2 智能控制
关键词:双容水箱;仿真实验;PID 控制;神经网络
目录
1 引言.............................................................................................................................1 1.1 研究背景..............................................................................................................1 1.2 智能控制..............................................................................................................1 1.2.1 智能控制的产生及研究现状 .......................................................................1 1.2.2 智能控制的类型及研究对象特点 ...............................................................2 1.2.3 智能控制的未来发展趋势 ...........................................................................2 1.3 研究内容及章节介绍..........................................................................................3
4 神经网络及控制方法...............................................................................................12 4.1 神经网络简介....................................................................................................12 4.1.1 神经网络概述 .............................................................................................12 4.1.2 神经网络的特征及性质 .............................................................................13 4.2 BP 网络学习过程及其算法 ..............................................................................13 4.3 神经网络控制方法简介....................................................................................15
1.2.1 智能控制的产生及研究现状
自 1932 年奈魁斯特(H.Nyquist)的有关反馈放大器稳定性论文发表以来,控制理 论的发展已走过了近 80 年的历程。前 30 年是经典控制理论的发展和成熟阶段,后 50 年是现代控制理论的形成和发展阶段。随着研究的对象和系统越来越复杂,借助 于数学模型描述和分析的传统控制理论已难以解决复杂系统的控制问题。智能控制是 针对控制对象及其环境、目标和任务的不确定性和复杂性而产生和发展起来的。从 20 世纪 60 年代起,计算机技术和人工智能技术迅速发展,为了提高控制系统的自主 学习能力,人工智能技术被学者们提出并广泛应用于控制系统。1965 年,美籍华裔 科学家傅京孙教授首先把人工智能的启发式推理规则用于学习控制系统;1966 年,
3 PID 控制及参数整定 ...............................................................................................10 3.1 PID 控制简介 ....................................................................................................10 3.2 双容水箱 PID 控制系统的仿真实验 ...............................................................10
2 系统建模与 MATLAB 环境 ......................................................................................4 2.1 过程控制系统的建模方法..................................................................................4 2.1.1 机理法 ...........................................................................................................4 2.1.2 测试法 ...........................................................................................................4 2.2 双容水箱液位控制系统的建模..........................................................................4 2.3 MATLAB 环境及 Simulink 模型 .......................................................................8 2.3.1 MATLAB 软件简介 .....................................................................................8 2.3.2 Simulink 模型................................................................................................8