串口指令说明
marlin串口指令
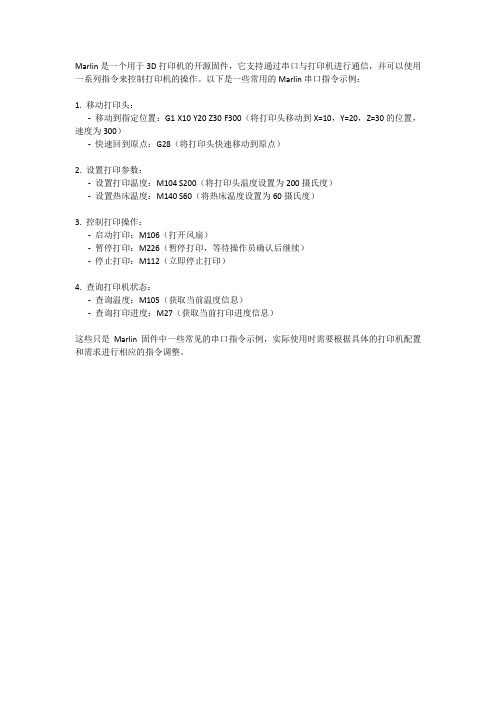
Marlin是一个用于3D打印机的开源固件,它支持通过串口与打印机进行通信,并可以使用一系列指令来控制打印机的操作。
以下是一些常用的Marlin串口指令示例:
1. 移动打印头:
-移动到指定位置:G1 X10 Y20 Z30 F300(将打印头移动到X=10,Y=20,Z=30的位置,速度为300)
-快速回到原点:G28(将打印头快速移动到原点)
2. 设置打印参数:
-设置打印温度:M104 S200(将打印头温度设置为200摄氏度)
-设置热床温度:M140 S60(将热床温度设置为60摄氏度)
3. 控制打印操作:
-启动打印:M106(打开风扇)
-暂停打印:M226(暂停打印,等待操作员确认后继续)
-停止打印:M112(立即停止打印)
4. 查询打印机状态:
-查询温度:M105(获取当前温度信息)
-查询打印进度:M27(获取当前打印进度信息)
这些只是Marlin固件中一些常见的串口指令示例,实际使用时需要根据具体的打印机配置和需求进行相应的指令调整。
nodemcu lua 串口指令

一、概述在使用NodeMCU开发板进行Lua编程时,串口通信是非常常见的操作。
通过串口通信,可以实现与其他设备的数据交换,包括传感器、显示屏、电脑等。
本文将介绍NodeMCU Lua编程中的串口指令,包括串口初始化、发送数据、接收数据等操作,帮助读者更好地掌握串口通信的方法和技巧。
二、NodeMCU串口介绍NodeMCU是一款基于ESP8266芯片的开源物联网评台,它集成了Wi-Fi模块和微控制器,能够方便地进行无线通信和控制。
在NodeMCU开发板上,一般会提供有串口接口,通过串口通信可以实现与其他设备的数据交换。
三、NodeMCU串口初始化1. 串口初始化函数在NodeMCU Lua编程中,要使用串口通信,需要先对串口进行初始化。
串口初始化的函数为“uart.setup(id, baud, data_bits, parity, stop_bits, flow_control)”。
参数说明:id:串口编号,一般为1或2baud:波特率,常用的有9600、xxx等data_bits:数据位,一般为8位parity:校验位,一般为uart.PARITY_NONEstop_bits:停止位,一般为uart.STOPBITS_1flow_control:流控制,一般为uart.FLOW_NONE2. 串口初始化示例要对串口1进行初始化,波特率为9600:uart.setup(1, 9600, 8, uart.PARITY_NONE, uart.STOPBITS_1, uart.FLOW_NONE)四、NodeMCU串口发送数据1. 串口发送函数串口初始化完成后,就可以使用串口发送数据了。
串口发送数据的函数为“uart.write(id, data, ...)”。
参数说明:id:串口编号,与初始化时一致data:要发送的数据,可以是字符串或者数值...:可以传入多个参数,依次发送2. 串口发送示例要向串口1发送“Hello, World!”:uart.write(1, "Hello, World!")五、NodeMCU串口接收数据1. 串口接收函数除了发送数据,NodeMCU还可以通过串口接收外部设备发送过来的数据。
雷赛步进驱动器串口通讯指令说明
备注: #1、规划速度的单位为RPS(转/秒),速度=数据值*0.01 即最小0.1PRS(6RPM),最大60RPS(3600RPM) #2、规划位置的单位为相对转数,位置=数据值*0.01, 即最小0.01转(3.6度),最大655转(235800度) #3、间歇时间的单位为毫秒(ms),只在往复运动或多次运 动时起作用,用于间隔中间的停顿时间。
串口通讯命令解析如下 校验方式:CRC16(循环冗余校验) 多项式:0x8005 数据反转:低位在前,高位在后(LSB First) 初始值:0xFFFF 异或值:0x0000
格式
序 号 1 2 3 3 4 5 6 7 8 9 10 11 指令名称 低电平使能 高电平使能 停止运动 启动运动 CW方向 CCW方向 单向运动 往复运动 规划速度 规划位置 运动次数 间歇时间 字头 (1byte) 0x01 0x01 0x01 0x01 0x01 0x01 0x01 0x01 0x01 0x01 0x01 0x01 数据长度 (1byte) 0x06 0x06 0x06 0x06 0x06 0x06 0x06 0x06 0x06 0x06 0x06 0x06 功能索引 (2byte) 0x00 0x96 0x00 0x96 0x00 0x09 0x00 0x09 0x00 0x1A 0x00 0x1A 0x00 0x1C 0x00 0x1C 0x00 0x16 0x00 0x18 0x00 0x19 0x00 0x1B 数据(2byte) 0x00 0x00 0x00 0x01 0x00 0x00 0x00 0x01 0x00 0x00 0x00 0x01 0x00 0x00 0x00 0x01 10-6000 #1 0-65535 #2 0-65535 0-65535 #3 校验码 (2byte) 0x69 0xE6 0xA8 0x26 0x59 0xC8 0x98 0x08 0x98 0x08 0xA8 0x0D 0x48 0x0C 0x89 0xCC Variational Variational Variational Variational
串口控制通信指令说明书

串口控制通信指令说明书HSC-U007 FeaturesHigh performance 8-bit MCUDC-48MHZ operationCompatible with 8051All instructions are single-cycle except branching instructionsTwo data pointer for indirect addressingFlexible I/O2 GPIO pinsCMOS/TTL level Schmitt triggered inputDigital Peripheral FeatureWatchdogOne full-duplex UARTMPEG-1, MPEG-2, MPEG-2.5 Audio Layer 1,2,3 decoder. Bit rate 8-448Kbps, CBR/VBR/ABR Support WMA format, data rate support 5kbps or aboveSupport 9 sampling frequency:8kHz/11.025kHz/12kHz/16kHz/22.05kHz/24kHz/32kHz/44.1kHz/48kHzSD Card Host controllerFull speed USB 2.0 HOST/DEVICE controllerAnalog Peripheral FeaturesOne 1~24MHz Crystal OscillatorAn independent powered RTC with One 32KHz Crystal OscillatorOne internal RC oscillatorFull speed USB 2.0 PHY48MHz PLL-based clock generator24-bit Stereo DAC,SNR > 90dBEmbedded headphone amplifier2 channels Analog MUX8 Channels 10-bit ADC2 channels 4 levels Low Voltage DetectorPower-on resetTwo LDO: 5V to 1.8V, 5V to 3.3VPower SupplyDC IN is 3.2V to 5.5V+3.3V is 3.0V to 3.6VAVCC is 1.6V to 2.0VPackagesSSOP24一、串口通讯设置波特率设为115200,数据位8位,停止位1位,校验位无。
串口继电器控制板输入输出指令操作

串口继电器控制板⏹技术参数:供电电源:24VDC开关量输入:12路24VDC继电器输出:8路⏹接线图⏹出厂默认串口参数:从机站号:1波特率9600数据位8校验位无停止位1⏹MODBUS RTU通信地址对照表寄存器名对应模块的内部地址4x0038波特率4x0039从机号4x003A奇偶校验位4x003B自定义掉电数据保存区4x003C自定义掉电数据保存区4x0035自定义掉电数据保存区4x0036自定义掉电数据保存区⏹【UART为了提高模糊通信搜索模块】站号设置:0-127波特率设置:0=1200,1=2400,2=4800,3=9600,4=19200,5=57600,奇偶校验位设置:0=无校验位,1=奇校验,2=偶校验⏹使用MODBUS协议发指令改变设备参数示例:示例1:修改设备的波特率为19200步骤1:发数据6到地址0x0038即可完成修改,报文格式如下所示。
备注:修改参数后需断电重新启动才生效。
0106003800049804从机地址功能号数据地址数据CRC校验示例2:修改设备的从机号为50步骤1:发数据50到地址0x0039即可完成修改,报文格式如下所示。
备注:修改参数后需断电重新启动才生效。
010*********D812从机地址功能号数据地址数据CRC校验示例3:修改设备的校验为偶校验步骤1:发数据2到地址0x0040即可完成修改,报文格式如下所示。
备注:修改参数后需断电重新启动才生效。
01060040000209DF从机地址功能号数据地址数据CRC校验只有三个命令,即:命令命令码目标设备DEVICE READ CMD"02"XDEVICE READ CMD"01"Y,FORCE CMD"05"Y,读取输入点X状态:02计算机向串口继电器控制板发送:设备站号命令开始地址需要读取数目CRC校验串口继电器控制板返回:设备站号命令数据大小有效数据CRC校验读状态:X0-X7X10-X13发出0x010x020x000x000x000x080x790xCC接收0x010x020x010xXX0xXX0xXX↑↑↑有效数据两字节CRC校验如下举例0x32假设接收到的报文是:0x010x020x010x320x200x5D其中0x32代表了X0-X7的状态:0x32对应的8位二进制代码是:00110010,最高位表示X7,最低位表示X0,是1表示有输入状态,这个数据表示:X7X6X5X4X3X2X1X000110010X10-X13:(分析数据原理同上)发出0x010x020x000x0A0x000x040x590xCB接收0x010x020x010xXX0xXX0xXX详细地址:地址(1X)描述只读0210000第1路开关量输入状态(X0)=1接通电源=0没有接通10001第2路开关量输入状态(X1)=1接通电源=0没有接通10002第3路开关量输入状态(X2)=1接通电源=0没有接通10003第4路开关量输入状态(X3)=1接通电源=0没有接通10004第5路开关量输入状态(X4)=1接通电源=0没有接通10005第6路开关量输入状态(X5)=1接通电源=0没有接通10006第7路开关量输入状态(X6)=1接通电源=0没有接通10007第8路开关量输入状态(X7)=1接通电源=0没有接通10010第9路开关量输入状态(X10)=1接通电源=0没有接通10011第10路开关量输入状态(X11)=1接通电源=0没有接通10012第11路开关量输入状态(X12)=1接通电源=0没有接通10013第12路开关量输入状态(X13)=1接通电源=0没有接通保留读取输出点Y状态:01Y0-Y7:发出0x010x010x000x000x000x080x3D0xCC接收0x010x010x010xXX0xXX0xXX假设接收到的报文是:0x010x010x010x5B0x100x73其中0x5B代表了Y0-Y7的状态:0x5B对应的8位二进制代码是:01011011,最高位表示Y7,最低位表示Y0,这个数据表示:Y7Y6Y5Y4Y3Y2Y1Y001011011详细地址:地址(0X)描述可读可写(读01)00000第1路读开关量输出状态(Y0)=1高电平=0低电平00001第2路读开关量输出状态(Y1)=1高电平=0低电平00002第3路读开关量输出状态(Y2)=1高电平=0低电平00003第4路读开关量输出状态(Y3)=1高电平=0低电平00004第5路读开关量输出状态(Y4)=1高电平=0低电平00005第6路读开关量输出状态(Y5)=1高电平=0低电平00006第7路读开关量输出状态(Y6)=1高电平=0低电平00007第8路读开关量输出状态(Y7)=1高电平=0低电平保留读取输出点Y状态:05(Y有效):置ON:发送返回Y0:01050000FF008C3A01050000FF008C3AY1:01050001FF00DD FA01050001FF00DD FAY2:01050002FF002D FA01050002FF002D FAY3:01050003FF007C3A01050003FF007C3AY4:01050004FF00CD FB01050004FF00CD FBY5:01050005FF009C3B01050005FF009C3BY6:01050006FF006C3B01050006FF006C3BY7:01050007FF003D FB01050007FF003D FB 置OFF:发送Y0:010*********CD CA010*********CD CAY1:0105000100009C0A0105000100009C0AY2:0105000200006C0A0105000200006C0AY3:0105000300003D CA0105000300003D CAY4:0105000400008C0B0105000400008C0BY5:010*********DD CB010*********DD CBY6:0105000600002D CB0105000600002D CBY7:0105000700007C0B0105000700007C0B 注:执行有效返回同样代码;执行无效不返回任何都信息;详细地址:地址(0X)描述可读可写(写05)00000第1路写开关量输出(Y0)=FF00置ON;=0000置OFF 00001第2路写开关量输出(Y1)=FF00置ON;=0000置OFF 00002第3路写开关量输出(Y2)=FF00置ON;=0000置OFF 00003第4路写开关量输出(Y3)=FF00置ON;=0000置OFF 00004第5路写开关量输出(Y4)=FF00置ON;=0000置OFF 00005第6路写开关量输出(Y5)=FF00置ON;=0000置OFF 00006第7路写开关量输出(Y6)=FF00置ON;=0000置OFF 00007第8路写开关量输出(Y7)=FF00置ON;=0000置OFF设计掉电保护寄存器数据:06掉电保存数据:波特率等,发送:发出0x010x060x000x000x000x080x880x0C接收0x010x060x000x000x000x080x880x0C假设接收到的报文是:0x010x060x000x000x000x080x880x0C其中0x000x08代表了要设定地址0x000x00的数值,下次开机的时候可以保存这个数值。
modem串口调试命令

modem串口调试命令串口调试常用命令:1. 拨号命令:atd,号码2. 被叫摘机命令:ata3. 退出命令:+++ath4.来电显示:AT+VCID=0 关AT+VCID=1 开=============用串口工具连接上Modem所在的那个端口。
比如你是外置Modem,连接在了COM1口上,就用串口工具打开COM1口。
如果是内置的话,多数在COM3口上,如果你不知道,可以打开设备管理器在Modem属性页里看看。
OK,下面介绍AT指令。
常用AT指令有:ATZ 软复位modem。
AT&K0 关闭流控制。
AT&K3 使用RTS/CTS流控制。
AT&W0 把当前设置保存到写到modem的永久存储器中的出厂设置配置文件0中。
AT&Y0 当MODEM在上电时自动调用出厂设置0,这样就能保证每次上电恢复我们预先设置的参数。
ATDn 拨号,其中n为电话号码。
它必须是命令行中的最后一条指令,ATD命令使调制解调器摘机后,根据输入的参数拨号,以建立连接。
+++ 退出字符。
切换调制解调器从在线状态到命令状态,而不会中断数据连接。
ATA 应答。
它必须是命令行中的最后一条指令。
调制解调器在应答方式下继续执行连接程序。
在与远端调制解调器交换载波后进入连接状态,如果没有检测到载波, 调制解调器将挂机。
在连接过程中,通过DTE输入的任何一个字母都将中断这一命令。
ATH0 使调制解调器挂机ATE0 关闭命令字符回显ATE1 打开命令字符回显AT&F 调MODEM的出厂设置ATS0=n 将MODEM设置成自动应答,当MODEM检测到线路上的振铃音时开始计数,当有连续n声振铃音,则MODEM自动摘机,响应呼叫。
注:每次输入AT指令后(除+++以外),输入+ Chr(13)即“Enter”键,即完成指令发送。
如果用HEX格式发送,在命令头、尾都要加回车、换行代码。
串口命令模式命令说明
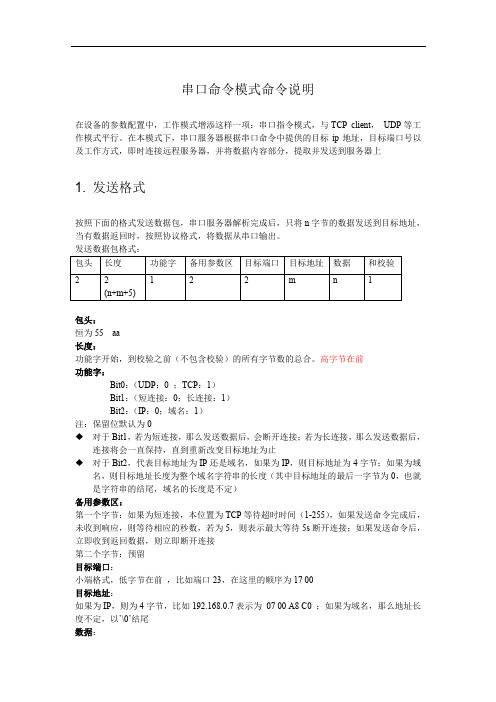
在设备的参数配置中,工作模式增添这样一项:串口指令模式,与 TCP client, UDP 等工 作模式平行。在本模式下,串口服务器根据串口命令中提供的目标 ip 地址,目标端口号以 及工作方式,即时连接远程服务器,并将数据内容部分,提取并发送到服务器上
1. 发送格式
按照下面的格式发送数据包,串口服务器解析完成后,只将 n 字节的数据发送到目标地址,
以 TCP 协议向地址 ,端口 10101 发送数据,内容为“”,等 待 10 秒断开连接,如接收到数返回则立即断开连接
当有数据返回时,按照协议格式,将数据从串口输出。 目标地址 数据 和校验
2
2
1
2
(n+m+5)
2
m
n
1
包头: 恒为 55 aa 长度: 功能字开始,到校验之前(不包含校验)的所有字节数的总合。高字节在前 功能字:
Bit0:(UDP:0 ;TCP:1) Bit1:(短连接:0;长连接:1) Bit2:(IP:0;域名:1) 注:保留位默认为 0 对于 Bit1,若为短连接,那么发送数据后,会断开连接;若为长连接,那么发送数据后, 连接将会一直保持,直到重新改变目标地址为止 对于 Bit2,代表目标地址为 IP 还是域名,如果为 IP,则目标地址为 4 字节;如果为域 名,则目标地址长度为整个域名字符串的长度(其中目标地址的最后一字节为 0,也就 是字符串的结尾,域名的长度是不定) 备用参数区: 第一个字节:如果为短连接,本位置为 TCP 等待超时时间(1-255),如果发送命令完成后, 未收到响应,则等待相应的秒数,若为 5,则表示最大等待 5s 断开连接;如果发送命令后, 立即收到返回数据,则立即断开连接 第二个字节:预留 目标端口: 小端格式,低字节在前 ,比如端口 23,在这里的顺序为 17 00 目标地址: 如果为 IP,则为 4 字节,比如 192.168.0.7 表示为 07 00 A8 C0 ;如果为域名,那么地址长 度不定,以’\0’结尾 数据:
华为摄像机的串口控制指令

串口命令 81 01 04 设置预置位 81 01 04 回到预置位 81 01 04 云台向上运动 81 01 06 云台向下运动 81 01 06 云台向左运动 81 01 06 云台向右运动 81 01 06 云台停止 81 01 06 云台回到HOME位置 81 01 06 设置水平运转的默认速度(不推荐使用) 81 03 06 设置上下运转德默认速度(不推荐使用) 81 03 06
FF FF FF 0q FF FF FF 0q FF FF FF
0r
0s
FF
0r
0s
FF
参数说明 参数z=0-5 预置位索引 参数z=0-5 预置位索引 参数z=0-5 预置位索引 参数V=水平运动的速度1-20 参数V=水平运动的速度1-20 参数V=水平运动的速度1-20 参数V=水平运动的速度1-20 参数V=水平运动的速度1-20 参数V= W= 参数V表示速度5-20 参数V表示速度5-20
W=上下运动的速度1-20 W=上下运动的速度1-20 W=上下运动的速度1-20 W=上下运动的速度1-20 W=上下运动的速度1-20
pqrs: Zoom Position
pqrs: Focus Position
3F 3F 3F 01 01 01 01 01 04 05 06
00 01 02 0V 0V 0V 0V 0V FF vv vv
0z 0z 0z 0W 0W 0W 0W 0W FF FF
FF FF FF 03 03 01 02 03
01 02 03 03 03
FF FF FF FF FF
Zoom:停止 Zoom:拉远 Zoom:拉近 Zoom:设置zoom的位置 Focus:停止 Focus:拉远 Focus:拉近 Focus:设置focus的位置 Focus:自动聚焦 Focus:手动聚焦 Focus:手动自动聚焦切换
迪文 设置 串口波特率 指令-解释说明

迪文设置串口波特率指令-概述说明以及解释1.引言1.1 概述概述部分是文章的开头,它旨在给读者提供一个简要的了解问题的背景和重要性。
对于这篇文章,我们可以这样编写概述部分的内容:概述:在迪文设备的串口通信中,波特率设置是一个关键的部分。
波特率是指每秒钟传送的波特数,它决定了数据传输的速度和稳定性。
在本文中,我们将详细介绍迪文设备的串口通信原理和波特率设置指令。
了解这些内容对于正确配置和使用迪文设备的串口通信功能非常重要。
首先,我们将对迪文设备进行简要介绍,包括其主要特点和应用领域。
然后,我们将深入讨论串口通信原理,包括串行数据传输的工作原理和通信过程中的一些重要概念。
接下来,我们将详细介绍串口波特率设置指令的使用方法和参数,以及其对数据传输的影响。
在结论部分,我们将强调波特率设置的重要性,并提供迪文设备的具体波特率设置方法。
我们还将探讨不同波特率设置对不同应用场景的影响,并展望未来可能的发展方向。
通过阅读本文,读者将能够全面了解迪文设备串口通信的工作原理和波特率设置方法,从而正确配置和优化迪文设备的串口通信功能,提高数据传输的效率和可靠性。
让我们开始探索迪文设备的串口波特率设置指令吧!1.2文章结构1.2 文章结构:本文将按照以下结构进行讲解和分析。
首先,在引言部分,我们将概述本文的研究背景和目的,以及总结文章的主要内容。
接下来,在正文部分,我们将介绍迪文设备的基本信息,并详细解释串口通信的原理。
然后,我们将重点讨论串口波特率设置指令的相关知识,包括指令的作用、格式等。
在结论部分,我们将强调波特率设置的重要性,介绍迪文设备的波特率设置方法,并展望其在不同应用场景下的潜在价值。
通过对这些内容的阐述,读者将能够全面了解迪文设备的串口波特率设置指令,并在实际应用中更好地理解和应用该指令。
接下来,我们将开始本文的主体部分,首先介绍迪文设备的基本概况。
1.3 总结总结部分内容:通过本文的阅读,我们对迪文设备的串口波特率设置指令有了深入的了解。
CH9121串口控制指令集说明书

CH9121Serial control instruction setV2.0OverviewCH9121supports two ways to enter the serial port configuration mode,using the serial port of port1:*The hardware CFG0pin is pulled low to enter.When the CFG0pin detects a low level,the CH9121 serial port data will be used as a configuration command.The CFG0pin is pulled high to exit the configuration mode,and the configuration command is sent with a fixed baud rate of9600bps.*The serial port negotiation mode(need to be turned on through the network configuration software first)enters the serial port configuration mode.When the serial port idle time reaches 500ms,the serial data received by CH9121is compared with{0x55,0xaa,0x5a},the comparison is successful,CH9121will reply one byte:0xa5,after receiving the response data0xa5within500ms, send0xa5to confirm entry Configuration mode.If there is an error in the data comparison of any link in the middle,it is considered that these data bits are normal serial data,and this part of the data is sent to the network through the serial port,and the baud rate of the configuration command is sent to the actual baud rate of the serial port.Command code*The format of the command code sent by CH9121is"0x570xab command code parameter (optional)"Command code Parameter Return Command purpose0x01/Chip version number Query chip versionnumber0x02/0xaa Reset chip0x03/0x00:TCP Disconnect0x01:TCP Connect Query port1TCP connection status0x04/0x00:TCP Disconnect0x01:TCP Connect Query port2TCP connection status0x0d/0xaa Save parameters toEEPROM0x0e/0xaa Execute theconfiguration command,and Reset CH91210x5e/0xaa Leave serial portconfiguration mode(Only on the serial portnegotiating sideFormula is valid)0x10Setting mode:00:TCP server01:TCP client02:UDP server 0xaa Set chip port1netNetwork mode03:UDP client0x11Device IP address0xc00xa80x010xc8(192.168.1.200)0xaa Set chip IP0x12Subnet mask:0xff0xff0xff0x00(255.255.255.0)0xaa Set chip mask0x13Gateway address:0xc00xa80x010x01(192.168.1.1)0xaa Set chip gateway0x14The port number:0xd00x07(2000)0xaa Set chip port1bookGround source port0x15Destination IP address:0xc00xa80x010x64(192.168.1.100)0xaa Set the destination IP ofchip port10x16Destination port:0xe80x03(1000)0xaa Set chip port1destination port0x17The port is enabledrandomly:0x00:prohibited0x01:enable 0xaa Set chip port1Localport random0x21Baud rate:0x800x250x000x00(9600)0xaa Set the baud rate of port1serial port0x220x010x040x08(1stop,noproofreading,8data)Check:00:even01:odd02:mark03:Space04:None 0xaa Set port1serial portcalibration bit,data bit,stop bit0x230x010x000x000x00(Serial timeout1*5ms,after which four bytesneed to be filled,andthe space is filled withzeros)0xaa Set port1serial portpacket timeout time0x240x01:disconnect0x00:no disconnection 0xaa Set port1network cabledisconnection whetherto disconnect the network connection0x250x000x020x000x00(Packing length2*256=512bytes)0xaa Set port1serial portreceiving packet length0x260x01:empty0x00:do not clear 0xaa Set whether to clear theserial port data whenport1is connected tothe network0x330x01:open0x00:close 0xaa Turn on/off the DHCPfunction0x34Domain name(maximum length28bytes)0xaa Set port1domain name0x390x01:open0x00:close0xaa Turn on/off port20x40Setting mode:00:TCP server01:TCP client02:UDP server03:UDP client 0xaa Set chip port2networkmode0x41The port number:0xd00x07(2000)0xaa Set chip port2localsource port0x42Destination IP address:0xc00xa80x010x64(192.168.1.100)0xaa Set the destination IP ofchip port20x43Destination port:0xe80x03(1000)0xaa Set chip port2destination port0x44Baud rate:0x800x250x000x00(9600)0xaa Set port2serial portbaud rate0x450x010x040x08(1stop,noproofreading,8data)Check:00:even01:odd02:mark03:Space04:None 0xaa Set port2serial paritybit,data bit,stop bit0x460x010x000x000x00(Serial timeout1*5ms,thereafterNeed to fill in fourbytes,emptyBit zero)0xaa Set port2serial portpacking timeout time0x47The port is enabledrandomly:0x00:prohibited0x01:enable 0xaa Set chip port2local portrandom0x480x000x020x000x00(Packing length2*256=512byte)0xaa Set port2serial portreceiving packet length0x490x01:empty0x00:do not clear 0xaa Set whether to clear theserial port data whenport2is connected tothe network0x60/Network mode(1byte)0x00:TCP server0x01:TCP client0x02:UDP server0x03:UDP client Read the working mode of chip port1,0x61/Device IP address0xc00xa80x010xc8(192.168.1.200)Read the chip IP address,0x62/Subnet mask:0xff0xff0xff0x00(255.255.255.0)Read chip mask0x63/Gateway address:0xc00xa80x010x01(192.168.1.1)Read chip gateway0x64/The port number:0xd00x07(2000)Read chip port1source port0x65/Destination IPaddress:0xc00xa80x010x64(192.168.1.100)Read the destination IP address of chip port10x66/Destination port:0xe80xe3(1000)Read the destination port number of chip port 10x71/Baud rate:0x800x250x000x00(9600)Read port1serial port baud rate0x72/0x010x040x08(1stop,noproofreading,8data)Check:00:even01:odd02:mark03:Space04:None Read port1serial port check bit data bit stop bit0x73/0x01(Serial timeout1*5ms)Read port1serial port timeout time0x81/6bytes MAC address Get chip MAC addressand0x90/Network mode(1byte)0x00:TCP server0x01:TCP client0x02:UDP server0x03:UDP client Read chip port2 working mode,0x91/The port number:0xd00x07(2000)Read chip port2source port0x92/Destination IPaddress:0xc00xa80x010x64(192.168.1.100)Read the destination IP address of chip port20x93/Destination port:0xe80xe3(1000)Read the destination port number of chip port 20x94/Baud rate:0x800x250x000x00(9600)Read port2serial port baud rate0x95/0x010x040x08(1stop,noproofreading,8data)Check:00:even01:odd Read port2serial port check bit data bit stop bit02:mark 03:Space 04:None0x96/0x01(Serial timeout1*5ms)Read port2serial timeout timeApplication noteSetting description:"→"Send from serial device"←"CH9121return*Enter the configuration mode process(serial port negotiation to enter,if it is entered by hardware pin mode,it is not necessary)→0x55,0xaa,0x5a←0xa5→0xa5←0xa5*Set module parameters:→0x57,0xab,0x10,0x02//UDP broadcast mode.←0xaa→0x57,0xab,0x11,0xc0,0xa8,0x01,0x0a//Source IP:192.168.1.10←0xaa→0x57,0xab,0x12,0xff,0xff,0xff,0x00//Subnet mask:255.255.255.0←0xAA→0x57,0xab,0x13,0xc0,0xa8,0x01,0x01//Gateway:192.168.1.1←0xaa→0x57,0xab,0x14,0x88,0x13//Local port:0x1388(5000)←0xaa→0x57,0xab,0x15,0xff,0xff,0xff,0xff//Destination IP address:255.255.255.255←0xaa→0x57,0xAB,0x16,0x70,0x17//Destination port:0x1770(6000)←0xaa→0x57,0xab,0x21,0x00,0xc2,0x01,0x00//Serial port baud rate:0x0001c200(1152000)←0xaa→0x57,0xab,0x0d//Update configuration parameters to EEPROM ←0xaa→0x57,0xab,0x0e//Perform configuration,reset9121←0xaa→0x57,0xab,0x5e//Leave configuration mode←0xaa*Read configuration→0x57,0xAB,0x81//Read MAC←0x84,0xC2,0xE4,0x05,0x06,0x07//Back to MAC→0x57,0xAB,0x61//Read source IP←0xC0,0xA8,0x01,0x10//Return IP address。
串口HMI指令集

串口HMI指令集发布版本V2.4 版本修改日期:2017年5月19日注:1.设备接受指令结束符为”0XFF 0XFF 0XFF”三个字节。
2.所有指令名以及参数全部使用ASCII字符串格式,非二进制数据,便于阅读和调试。
3.所有指令名使用小写字母(此处仅仅指的是指令名称为小写,参数该大写的时候还是要大写)。
4.0.39版本开始,在运行中修改控件的任何属性都将自动刷新,不再需要使用手动刷新指令。
(原来的版本在修改非加粗属性时需要手动刷新)。
分类一:对象及系统操作指令page pageidpageid:页面ID或页面名称实例1:page 0 (刷新ID为0的页面)实例2:page main (刷新名称为main的页面)备注:1.设备上电自动刷新第0页。
2.也可以对系统变量dp赋值来实现跳转页面(如dp=0),系统变量dp可以设置可以读取,具体请参看系统变量列表。
ref objobj:控件ID或控件名称实例1:ref 1 (重绘ID为1的控件)实例2:ref t0 (重绘名称为t0的控件)备注:如果一个控件被GUI指令画出来的内容遮挡或者被另外的控件遮挡之后需要再显示出来,就使用ref来重绘。
click obj,eventobj:控件ID或控件名称event:事件序号:0为弹起,1为按下click b0,1 (激活名称为b0的控件的按下事件)click 2,0 (激活ID为2的控件的弹起事件)备注:控件的按下/弹起事件在屏幕上触摸的时候会自动激活,如果在没有触摸的情况下想要手动激活,就使用click 指令即可。
get attatt:变量名称实例1:get t0.txt (返回控件t0的txt属性值) 实例2:get j0.val(返回控件j0的val属性值)1实例3:get “123”(返回常量字符串”123”) 实例4:get 123(返回常量数值:”123”)备注:1.使用get指令获取的变量为字符串类型时,返回的数据为0X70+字符串内码+结束符,如果是数值类型(如进度条的val属性)设备返回0X71+变量的4字节十六进制数据(int类型)+结束符。
串口指令手册spec版v1.1
参数:<mcu_version_string> 返回:如果参数合法,则返回ok,非法则返回error 说明:上报MCU固件版本。要求必须是4位数字。MCU应该在应用固件引导后,第一时间调用 该命令上报版本。另外,如果下行命令收到MIIO_mcu_version_req,也应该立即上报版本。 举例: ↑mcu_version 0001 ↓ok ↑mcu_version A001 ↓error ↑mcu_version 1 ↓error
服务器通信指令
get_downBiblioteka 参数:无 返回:down <method_name> <arg1>,<arg2>,<arg3> ... 说明:获取下行指令。
返回值说明:如果没有下行命令,则返回down none。如果有下行命令,则返回命令名、命令 参数(如果有参数)。命令名和参数之间用空格隔开,多个参数之间用逗号隔开。参数可以是 双引号括起的字符串,或是数字。返回的命令名可能为get_properties,set_properties或 action,对应相应的设备功能定义,需要MCU根据设备实例定义处理对应操作。 举例: ↑get_down ↓down none ↑get_down ↓down set_properties 1 1 10 ↑result 1 1 0 ↓ok ↑get_down ↓down action 1 1 ↑get_down ↓error
参数:event_occured ... 返回:ok 或 error 说明:用于时间上报。
举例: ↑event_occured 1 1 1 17 2 "hi" ↓ok ↑event_occured 1 ↓error
修改plc波特率等串口参数的指令
修改plc波特率等串口参数的指令修改PLC波特率等串口参数的指令在工业自动化领域,PLC(可编程逻辑控制器)是一种常用的控制设备。
在PLC的应用过程中,有时需要修改串口参数,例如波特率、数据位、停止位等。
下面是一种常见的修改PLC串口参数的指令。
确保PLC已经连接到电脑或者监控设备上。
接下来,打开PLC编程软件,并进入通信设置界面。
在该界面中,可以找到串口参数设置选项。
1. 修改波特率:在串口参数设置界面中,找到波特率选项。
通常可以选择的波特率包括9600、19200、38400、57600、115200等。
根据实际需求,选择合适的波特率并保存设置。
2. 修改数据位:在串口参数设置界面中,找到数据位选项。
一般可选的数据位有5、6、7、8。
根据通信设备的要求,选择相应的数据位并保存设置。
3. 修改停止位:在串口参数设置界面中,找到停止位选项。
通常可选的停止位有1或2。
根据通信设备的要求,选择适当的停止位并保存设置。
4. 修改校验位:在串口参数设置界面中,找到校验位选项。
常见的校验位有无校验、奇校验和偶校验。
根据通信设备的要求,选择合适的校验位并保存设置。
5. 应用设置:在修改完以上参数后,点击确认或者应用设置按钮,使修改生效。
通过以上步骤,我们可以轻松地修改PLC的串口参数,以满足不同的通信需求。
请注意,在修改参数之前,务必了解通信设备的要求,并确保所做的修改是正确的。
只有正确设置了串口参数,才能保证PLC与其他设备之间的稳定通信。
希望这篇文章对您了解如何修改PLC串口参数有所帮助。
串口 at指令 处理

串口 at指令处理
串口AT指令是指用于通过串口通信控制设备的指令,通常以"AT"开头。
在串口AT指令处理中,需要考虑以下几个方面:
1. 指令解析:设备需要能够识别并解析接收到的AT指令,以便执行相应的操作。
2. 透传模式:有些设备可能会进入透传模式,不再识别AT指令,而是将接收到的所有数据都透传给主机。
在这种情况下,需要根据实际需求决定是否需要对接收到的数据进行进一步的处理。
3. 指令处理:设备需要根据接收到的AT指令执行相应的操作,例如设置参数、查询状态等。
在处理过程中,需要确保指令的正确性和安全性。
4. 错误处理:当设备接收到错误的AT指令时,需要能够识别并处理错误,例如返回错误代码或提示信息。
5. 通信协议:串口AT指令通常基于特定的通信协议,例如RS-232、RS-485等。
在实现串口AT指令处理时,需要确保通信协议的正确性和可靠性。
总的来说,串口AT指令处理需要考虑到设备的透传模式、指令解析、指令处理、错误处理和通信协议等方面,以确保设备能够正确地处理AT指令,实现所需的功能。
DTU 固件串口配置命令手册说明书

DTU固件串口配置命令手册版本:V2.0版权声明版权所有:深圳市银尔达电子有限公司,深圳市银尔达电子有限公司保留所有权利。
说明本文档用于记录、指导研发流程和人员基本文档。
公司网站:联系电话:*************联系地址:深圳市龙华区大浪街道华宁路117号中安科技园A栋2003-2005修订记录版本修改内容编写人修订时间V1.0新建杨洋20201102 V1.1RS485增加EN翻转时间杨洋20210320杨洋20210620 V1.2N58系列固件版本:1.0.8Air724系列固件版本:1.0.81、增加串口无数据重启时间2、增加网络无数据重启时间3、Reboot命令支持目标服务器下发重启设备杨洋20210628 V1.3Air724系列固件版本:1.1.01、增加服务器是否能执行远程命令的功能-remotecmd2、增加NTP同步时间开关功能-ntptime3、增加基站定位自动上报命令功能-location4、Air724系列增加心跳包、注册包中引用${IMEI},${ICCID},${CSQ},${GPS}变量。
5、变量匹配目前N58不支持6、Air724系列支持输入、输出的设备控制和查询GPIO杨洋20210728 V1.41、增加dooutext和diinext命令2、增加uart替换ttluart和rs232命令配置TTL串口和RS232串口3、增加HTTP协议描述杨洋20210726 V1.51、增加aii读取电流命令2、增加aiv读取电压命令V1.61、修改阿里MQTT,增加MQTT连接域名参数,以支持阿里企业版杨洋20210927杨洋20211212 V1.71、修改netstatus应答命令描述2、增加GPS命令描述3、增加变量描述4、增加获取SIM卡IMSI编码V1.81、增加powerout命令控制可控电压输出杨洋20220710 V1.91、增加支持腾讯腾讯物联网开发平台(IoT Explorer)杨洋202209192、增加支持低功耗命令3、增加TTS控制命令4、增加支持移动Onenet多协议接入TCP接入命名5、增加支持移动Onenet多协议接入Modbus接入命名6、增加支持移动Onenet MQTT物联网套件(新版)接入命名7、增加支持控制LED命令8、扩展apn命令,支持单独标记是公网APN还是专网APNV2.01、增加扩展GPS命令gpsext目录一、适合的产品 (5)1.1、适合Air724系列 (5)1.2、适合N58系列 (6)二、命令格式约定 (7)2.1、约定 (7)2.2、设置和查询 (7)2.3、应答命令 (7)2.4、命令实例 (8)2.5、错误码 (8)三、变量引用说明 (9)四、执行命令列表清单 (10)五、系统命令详情 (11)5.1、读取imei命令-imei (11)5.2、读取SIM卡ICCID命令-iccid (11)5.3、固件版本命令-firmwarever (11)5.4、信号质量命令-csq (11)5.5、网络时间命令-nettime (12)5.6、基站定位命令-lbsloc (12)5.7、重启设备命令-reboot (12)5.8、读取设备供电电压命令-vbatt (12)5.9、恢复出厂设置命令-reset (13)5.10、保存参数命令-save (13)5.11、网络参数版本命令-paramver (13)5.12、操作密码命令-password (14)5.13、验证密码命令-vspassword (14)5.14、参数源命令-paramsrc (15)5.15、自动重启时间命令-reboottime (15)5.16、日志输出命令-log (16)5.17、固件自动升级命令-ota (16)5.18、网络分帧超时时间命令-netouttime (17)5.19、串口无数据重启时间命令-uartreboottime (18)5.20、网络无数据重启时间命令-netreboottime (18)5.21、支持远程控制命令命令-remotecmd (19)5.22、NTP同步时间命令-ntptime (19)5.23、控制输出通道_doout(有输出的设备有效) (20)5.24、查询输入电平通道_diin(有电平输入的设备有效) (20)5.25、控制输出通道_dooutext(有输出的设备有效) (21)5.26、查询输入电平通道_diinext(有电平输入的设备有效) (21)5.27、查询输入电压通道_aii(有电流输入的设备有效) (22)5.28、查询输入电压通道_aiv(有电压输入的设备有效) (22)5.29、获取GPS定位命令-gps (23)5.30、获取SIM卡IMSI命令-imsi (23)5.31、控制可控电源输出命令_powerout(有硬件资源的设备有效) (23)5.32、控制设备开启低功耗命令_lp(有硬件资源的设备有效) (24)5.33、控制设备开启TTS播放模式命令_ttst(有硬件资源的设备有效) (24)5.34、控制设备播放TTS文本转语音命令_ttsp(有硬件资源的设备有效) (25)5.35、控制设备LED指示命令_led(有硬件资源的设备有效) (25)5.36、控制设备新连接清除上报缓存指示命令_dcache (26)5.37、获取GPS定位扩展命令-gpsext (26)六、SIM卡APN设置 (27)6.1、公网卡APN设置命令-apn (27)七、串口参数设置 (28)7.1、设置ttl串口参数命令-ttluart (28)7.2、设置RS232串口参数命令-rs232 (29)7.3、设置RS485串口参数命令-rs485 (30)7.4、设置串口参数命令-uart (31)八、网络通道命令列表 (32)8.1、网络链接状态netstatus (32)8.2、查询网络通道信息命令-netchaninfo (32)8.3、删除网络通道信息命令-delnetchan (32)8.4、设置TCP链接通道命令-tcp (33)8.5、设置UDP链接通道命令-udp (35)8.6、设置MQTT通道命令-mqtt (37)8.7、设置阿里云IOT一型一密命令-ali(yxym) (39)8.8、设置阿里云IOT一机一密命令-ali(yjym) (41)8.9、设置HTTP通道命令-http (43)8.10、设置腾讯云IoT Explorer命令-txiot (45)8.11、设置移动onenet多协议TCP协议连接命令-onenet (47)8.12、设置移动onenet多协议modbus协议连接命令-onenet (48)8.13、设置移动onenet MQTT物联网套件(新版)协议连接命令-onenet (48)九、自动轮询命令 (50)9.1、设置自动轮询命令-autopoll (50)9.2、删除自动轮询命令-delautopoll (51)一、适合的产品1.1、适合Air724系列固件版本为:YED_DTU_1.0.3格式的724系列产品。
单片机串口判断指令方法

单片机串口判断指令方法引言:单片机的串口通信是常见的一种通信方式,可以通过串口与其他设备进行数据交互。
在实际应用中,我们需要判断串口接收到的指令,以执行相应的操作。
本文将介绍一种基于单片机串口的指令判断方法,帮助读者了解如何在单片机中实现指令的判断和执行。
一、串口通信基础在介绍指令判断方法之前,我们先了解一下串口通信的基础知识。
串口通信是通过发送和接收数据来实现设备之间的数据交互。
通常情况下,一条串口数据由起始位、数据位、校验位和停止位组成,其中起始位用于标识数据包的开始,停止位用于标识数据包的结束,数据位用于传输实际的数据,校验位用于校验数据的正确性。
二、指令判断方法在单片机中判断串口接收到的指令,主要有两种方法:基于字符串匹配和基于指令码判断。
1. 基于字符串匹配基于字符串匹配的方法是将串口接收到的数据与预定义的指令进行逐一的比较,如果匹配成功,则执行相应的操作。
这种方法的优点是简单易懂,适用于指令较少且指令格式固定的情况。
例如,我们可以定义指令“LED_ON”表示打开LED灯,“LED_OFF”表示关闭LED灯,当串口接收到“LED_ON”时,执行打开LED灯的操作。
2. 基于指令码判断基于指令码判断的方法是将串口接收到的数据转换为指令码,然后与预定义的指令码进行比较,如果匹配成功,则执行相应的操作。
这种方法的优点是效率高,适用于指令较多且指令格式多变的情况。
例如,我们可以将指令“0x01”定义为打开LED灯的指令码,“0x02”定义为关闭LED灯的指令码,当串口接收到“0x01”时,执行打开LED灯的操作。
三、实例演示为了更好地说明指令判断方法的应用,我们以基于指令码判断的方法为例,演示如何实现串口指令的判断和执行。
1. 硬件准备我们需要准备一块单片机开发板,例如常用的51单片机开发板或者Arduino开发板。
将开发板与电脑连接,并通过USB线将开发板的串口与电脑的串口相连。
2. 软件编程接下来,我们需要使用相应的软件编写单片机程序。
串口指令程序
串口指令程序串口指令程序是指通过串口传输数据的一种程序,它可以实现设备之间的数据通信。
在现代电子设备中,串口通信已经得到广泛应用,例如单片机、嵌入式系统、传感器等等。
本文将介绍串口指令程序的基本原理、应用场景以及开发过程。
一、串口指令程序的基本原理串口指令程序是通过串口传输数据的一种通信方式。
它由发送端和接收端两部分组成。
发送端将要传输的数据按照一定的格式打包,并通过串口发送出去;接收端接收到数据后,根据约定的协议对数据进行解析和处理。
在串口通信中,常用的串口通信协议有RS232、RS485等。
串口指令程序在很多领域都有广泛的应用。
例如,工业控制领域中,可以通过串口指令程序实现设备之间的数据传输和控制;在自动化设备中,可以通过串口指令程序实现设备的远程监控和控制;在物联网领域中,可以通过串口指令程序实现各种传感器和终端设备的数据交互。
三、串口指令程序的开发过程开发串口指令程序需要以下几个步骤:1. 确定通信协议:首先需要确定使用的串口通信协议,例如RS232、RS485等。
不同的协议有不同的特点和适用场景,需要根据实际需求进行选择。
2. 设计数据格式:根据通信协议的要求,设计数据的格式。
通常情况下,需要定义数据的起始标志、数据长度、校验位等信息。
这些信息可以保证数据的完整性和准确性。
3. 编写发送端程序:根据设计好的数据格式,编写发送端程序。
发送端程序需要实现数据的打包和发送功能。
在发送数据之前,可以进行一些必要的处理,例如数据的转换和加密等。
4. 编写接收端程序:接收端程序需要实现数据的接收和解析功能。
接收端程序首先需要打开串口,并设置相应的参数,然后不断监听串口,接收数据。
接收到数据后,根据约定的协议进行数据的解析和处理。
5. 进行测试和调试:开发完成后,需要进行测试和调试。
可以通过连接真实设备或者使用模拟器进行测试。
在测试过程中,需要验证数据的传输是否准确可靠,程序的稳定性和健壮性等。
四、总结串口指令程序作为一种实现设备之间数据通信的方式,在现代电子设备中得到了广泛应用。
串口协议指令规则

串口协议指令规则一、引言串口是一种常见的计算机通信接口,用于在计算机与外部设备之间传输数据。
串口协议指令规则是保证数据传输准确和可靠的重要规范。
本文将介绍串口协议指令规则的相关内容,包括起始位、数据位、停止位和校验位等。
二、起始位起始位是串口通信中的第一个位,用于标识数据传输的开始。
通常情况下,起始位的电平为低电平。
当接收方检测到起始位为低电平时,即可开始接收数据。
三、数据位数据位用于传输实际的数据信息。
常见的数据位数有8位、7位、6位和5位等。
数据位的选择应根据实际需求和通信速率来确定。
通常情况下,数据位越多,传输的数据信息越丰富。
四、停止位停止位用于标识数据传输的结束。
常见的停止位有1位、1.5位和2位等。
通常情况下,停止位的电平为高电平。
当接收方检测到停止位为高电平时,即可确认数据传输已经结束。
五、校验位校验位用于校验数据传输的准确性。
常见的校验位有奇校验和偶校验两种。
奇校验要求数据位和校验位中1的个数为奇数,偶校验要求数据位和校验位中1的个数为偶数。
接收方在接收数据时,会根据校验位来判断数据是否有误。
六、握手协议握手协议用于在数据传输之前进行通信双方的配对确认。
常见的握手协议有XON/XOFF协议和RTS/CTS协议等。
XON/XOFF协议通过发送特定的控制字符来控制数据流的开启和关闭。
RTS/CTS协议通过发送请求信号和响应信号来进行数据传输的配对确认。
七、波特率波特率是指串口通信中的数据传输速率,常用的波特率有9600、19200、38400和115200等。
波特率的选择应根据实际需求和通信距离来确定。
通常情况下,波特率越高,数据传输速度越快。
八、数据帧数据帧是指在串口通信中传输的数据单元。
一个数据帧包括起始位、数据位、校验位和停止位等。
数据帧的长度应根据实际需求和通信速率来确定。
通常情况下,数据帧的长度越长,传输的数据信息越多。
九、错误检测错误检测是指在数据传输过程中检测数据是否有误。