课程设计(论文)—应变式加速度传感器设计
课程设计 基于加速度传感器的计步器设计

课程设计(报告)题目:基于加速度传感器的计步器设计课程:传感器与检测技术基于加速度传感器的计步器设计摘要随着我们生活水平的不断提高,社会各阶层的人们开始对身体健康尤其的关注。
然而健身的方法数不胜数,步行是最好的运动之一。
健康需要走出来,行走锻炼——人类生命健康的加氧站。
步行是一种静中有动、动中有静的健身方式,可以缓解神经肌肉紧张。
据专家实验得出,当烦躁、焦虑的情绪涌上心头时,我们以轻快的步伐散步15分钟左右,即可缓解紧张、稳定情绪。
计步器功能可以根据计算人的运动情况来分析人体的健康状况。
而人的运动情况可以通过很多特性来进行分析。
比如人在运动时会产生加速度。
论文主要采用了以单片机AT89C52为核心的计步器控制系统,并实现运动计步,是通过人运动时产生加速度变化来实现的,本文利用具有体积小,功耗低,三轴加速度传感器MMA7455来实现,采集到的加速度数据通过适当的算法就可以实现计步功能,最后通过LCD1602给予显示。
本设计的特色在于完整的设计出计步器及其控制电路,整个系统具有控制方便,检测精确,硬件结构简单,方便携带,成本较低等优点。
关键词:单片机;加速度传感器;液晶显示Abstract With our continuous improvement of living standards, social strata, especially the health of people began to concern. However, numerous methods of fitness, walking is the best exercise one. Health needs to come out, walking exercise - human life and health and oxygen station. Walking is a static in action, moving in a static way of fitness, can relieve nerve muscle tension. According to experts, experimentally derived, when irritability, anxiety in my heart, we are walking at a brisk pace for about 15 minutes, you can relieve tension, emotional stability. Pedometer function can be calculated according to the movement of the person to analyze human health. And the movement of people can be analyzed through a number of characteristics. Such as human in motion will produce accelerations.Thesis uses a microcontroller AT89C52 as the core control system pedometer, pedometer and achieve movement is produced by the human movement acceleration change to achieve, this paper has a small size, low power consumption, triaxial acceleration sensor MMA7455 to implementation, the acceleration data collected through appropriate algorithms can achieve step count, and finally through LCD1602 given display.This design feature is the complete design of a pedometer and its control circuit, the whole system easy to control, detection accuracy, the hardware structure is simple, easy to carry, and low cost.Keywords: Mcrocontroller, Acceleration sensors, LCD目录摘要 (I)Abstract (II)1 绪论 (1)1.1 课题研究目的及意义 (1)1.2 国内外计步器的发展情况 (2)1.3 计步器的原理及分类 (3)2 计步器系统总体设计结构设计 (9)2.1 计步器总体设计 (9)2.2 三种计步器的对比 (9)2.3 系统硬件结构方案设计 (12)2.4 系统设计方案论证 (13)3 计步器系统硬件电路设计 (13)3.1 加速度传感器电路 (13)3.2 单片机系统电路 (20)3.3 LCD显示电路 (23)3.4 开关与电源电路 (25)4 计步器系统软件设计 (27)4.1 主程序流程图 (27)4.2 子程序流程图 (28)5 计步器调试与结果分析 (28)5.1 实物系统调试 (28)5.2 结果分析 (33)6 总结与展望 (33)参考文献 (34)附录程序代码 (35)1.绪论1.1课程研究目的及意义智能仪器是当代发展最为迅猛的科学技术,在工业领域得到了广泛的应用。
课程设计--应变式力传感器设计
本文主要介绍应变式力传感器的设计及应用。
当今时代,传感器技术已形成为电子工业基础产品的一个独立门类,是信息社会的重要技术基础,应变式力传感器用作静态、动态条件下测力或称重,在我国工业生产过程检测与控制、自动计量等领域已大量应用。
随着技术进步以及用现代电子信息技术改造传统产业的深入,其需求量日趋增加。
在本文中主要介绍传感器的工作原理,电阻应变片的基本工作原理,传感器的选择材料,弹性元件的选择,应变式传感器的结构与设计。
以及简单介绍电阻应变式力传感器的两种应用形式,柱式力传感器,梁式力传感器及它们胶的粘贴类型及工艺原理,最后介绍温度补偿方法等。
关键词:力传感器;电阻应变片;电桥;线性度1 引言 (4)1.1 课题研究背景 (4)1.2 国内外发展动态 (4)1.3 传感器概念 (5)1.4 传感器的工作原理 (5)1.5 传感器的组成结构 (6)2 电阻应变片的相关知识 (8)2.1 电阻应变片的结构和工作原理 (8)2.2 电阻应变效应 (8)2.3 电阻应变片的种类及材料 (10)2.3.1 电阻应变片的种类 (10)2.3.2 电阻应变片的材料 (12)2.4 金属应变片的主要特性 (14)2.5 柱形应变式力传感器 (18)2.5.2 利用拉伸与压缩应力的称重传感器 (19)2.5.3 柱式称重传感器的误差来源 (22)2.6 梁式力传感器 (22)3 粘贴技术及稳定处理 (26)3.1 应变片粘贴技术 (26)3.1.1 粘结剂的选择 (26)3.1.2 应变计的粘贴 (26)3.2 弹性元件材料的稳定处理 (27)4电阻应变式传感器的信号处理电路 (29)4.1 转换电路 (29)4.2 直流电桥 (29)结论 (34)参考文献 (35)致谢 (36)1 引言1.1课题研究背景现代信息技术的三大基础是信息的拾取、传输和处理技术,也就是传感技术、通信技术和计算机技术,它们分别构成了信息技术系统的“感官”、“神经”、“大脑”。
应变式加速度测试系统与信号处理设计
应变式加速度测试系统与信号处理设计年级:学号:姓名:专业:指导老师:年月测试专业传感器与信号处理课程设计任务书本课程设计采用低频《应变式加速度传感器》为振动信号检出器,对车辆振动检测系统进行较全面的设计。
主要内容包括:传感器设计,供桥电源设计,信号调理器设计,仿真分析,测试信号分析与处理等。
通过该课程设计,使同学们初步掌握传感器与测试系统的设计步骤和方法,以及信号分析与处理的基本技术,培养同学们的设计能力。
一、应变式加速度传感器概念能感受规定的被测量并按一定规律转换成可用信号输出的器件或装置,称为传感器,通常由敏感元件和转换元件组成。
应变式加速度传感器是一种低频传感器,由弹性梁,质量块,应变片及电桥等组成,质量块在加速度作用下,产生惯性力使弹性梁变形来获取信号,是车辆振动测量常用传感器。
二、测试系统的组成1、应变式加速度传感器,检出振动信号;2、供桥电源(恒流源)及系统电源;3、信号调理器:放大器、滤波器及积分电路等。
三、应变式加速度传感器技术指标量程:±50 g;频率范围:0.01~149Hz;非线性误差:≤0.05灵敏度:≥0.001(v/g)外壳尺寸:不大于16mm×16mm×20mm;重量:不大于15g;供桥电压:2V~24V(DC)。
测试系统其它部分的技术指标应与传感器指标相匹配。
四、设计的主要内容1、测试系统2、仿真分析3、测试实验4、测试信号分析与处理目录设计计算 (1)一、加速度测试系统的原理与结构 (1)二、传感器设计 (1)1.应变式加速度传感器简介: (1)2.设计计算: (2)3.设计结果: (4)三、信号调理器设计 (5)1、电桥放大器设计: (6)2、滤波器设计 (9)3、积分电路设计 (12)4、有效值、峰值检测电路设计 (17)四、供桥电源设计 (21)1.设计指标 (21)2.小型变压器设计原理 (21)3.稳压电路图主要原件、性能 (22)5.电路设计、原件选取原则 (23)五、传感器、信号调理器电路总成 (24)六、加速度信号测试与信号分析处理 (25)1. 振动加速度信号测试 (25)2. 信号分析处理 (26)七、总结 (28)附录数据处理程序 (29)设计计算一、加速度测试系统的原理与结构应变式加速度传感器是一种能够测量加速度、速度和位移的传感器。
大三暑期传感器原理实习报告-应变式加速度传感器设计(精选多篇)

编号:_____大三暑期传感器原理实习报告-应变式加速度传感器设计学校:_________教师:_____________年___月___日(此文内容仅供参考,可自行修改)第1 页共19 页大三暑期传感器原理实习报告-应变式加速度传感器设计文章标题:大三暑期传感器原理实习报告-应变式加速度传感器设计应变式加速度传感器设计——大三暑期传感器原理实习报告(西南交大机械制造及自动化张其美19990780)1、设计任务及技术指标应变式加速度传感器的结构设计、特性曲线绘制等。
测量范围:20g;精度:1;尺寸:不大于;频响:0.1~100hz;重量:不大于20g;共桥电压:5v~24v(dc)。
2、结构设计(1)采用等强度梁结构;(2)材料选择及尺寸确定;a、壳体及质量块选用碳钢弹性模量:(与疲劳破坏有关)泊松比:b、弹性元件(梁)选用铍青铜(或硅梁)弹性模量:密度:抗拉强度:c、许用应力:(简单梁)取(3)设计计算;设计原则:第 2 页共 19 页a、在最小载荷f和相应的最大绕度或位移为已知时,可先根据结构要求确定长度,然后在计算和。
b、设计时先保证有足够的灵敏度,然后在尽可能提高(固有频率)c、质量块相对于基座的位移可按下列原则确定:当时,,其中a为被测加速度。
设计步骤:a、先估计,忽略,确定。
取,则b、估计和取c、确定d、求则,e、计算参数;取,1、梁根部应变:3、静态灵敏度:(与应变片布置有关)双臂工作时,4、动态灵敏度:5、梁自由端的静绕度:6、梁自由端的动绕度:7、传感器的固有频率:8、可测最大加速度:(4)幅频特性计算:要求绘制幅频曲线a、刚度:第 3 页共 19 页b、质量;c、阻尼比:,取0.6~0.7内。
d、有阻尼固有频率:e、幅频曲线:f、相频曲线:(五)应变片的选择:1、应变片的选择:选用小型硅应变片,参考规格:额定电阻:120;灵敏度系数:;尺寸:;最大工作电流:。
2、电桥输出灵敏度:(1)电桥的结构;等臂、差动。
大三暑期传感器原理实习报告-应变式加速度传感器设计
大三暑期传感器原理实习报告-应变式加速度传感器设计 文章标题大三暑期传感器原理实习报告 -应变式加速度传感器设计应 变式加速度传感器设计——大三暑期传感器原理实习报告西南交大机械制 造及自动化张其美 199907801、设计任务及技术指标应变式加速度传感器 的结构设计、特性曲线绘制等。
测量范围 20;精度 1;尺寸不大于;频响 01~100;重量不大于 20; 共桥电压 5~24。
2、结构设计 1 采用等强度梁结构;2 材料选择及尺寸确定;、壳体及 质量块选用碳钢弹性模量与疲劳破坏有关泊松比、弹性元件梁选用铍青铜 或硅梁弹性模量密度抗拉强度、 许用应力简单梁取 3 设计计算; 设计原则、 在最小载荷和相应的最大绕度或位移为已知时,可先根据结构要求确定长 度,然后在计算和。
、设计时先保证有足够的灵敏度,然后在尽可能提高固有频率、质量 块相对于基座的位移可按下列原则确定当时,,其中为被测加速度。
设计步骤、先估计,忽略,确定。
取,则、估计和取、确定、求则,、计算参数;取,1、梁根部应变 3、 静态灵敏度与应变片布置有关双臂工作时,4、动态灵敏度 5、梁自由端的 静绕度 6、梁自由端的动绕度 7、传感器的固有频率 8、可测最大加速度 4幅频特性计算要求绘制幅频曲线、刚度、质量;、阻尼比,取 06~07 内。
、有阻尼固有频率、幅频曲线、相频曲线五应变片的选择 1、应变片 的选择选用小型硅应变片,参考规格额定电阻 120;灵敏度系数;尺寸; 最大工作电流。
2、电桥输出灵敏度 1 电桥的结构;等臂、差动。
、单臂、双臂差动、四臂差动《大三暑期传感器原理实习报告-应变式 加速度传感器设计》来源于范文搜网,欢迎阅读大三暑期传感器原理实习 报告-应变式加速度传感器设计。
。
应变式传感器课程设计
应变式传感器课程设计一、课程目标知识目标:1. 学生能理解应变式传感器的原理,掌握其组成结构及工作方式。
2. 学生能够描述应变式传感器在工程测量中的应用,了解其优缺点。
3. 学生掌握应变式传感器的数学模型及其转换关系。
技能目标:1. 学生能够独立完成应变式传感器的电路连接,进行简单的数据采集。
2. 学生能够运用所学知识,对实际测量中的数据进行初步处理和分析。
3. 学生能够运用应变式传感器设计简单的实际应用项目,提高解决问题的能力。
情感态度价值观目标:1. 学生通过学习应变式传感器,培养对物理科学的兴趣和探究精神。
2. 学生在团队合作中,培养沟通协调能力和团队合作精神。
3. 学生了解传感器技术在现代社会中的重要作用,增强对科技创新的认识,提高社会责任感和使命感。
课程性质:本课程为高二年级物理选修课程,旨在通过实践操作,使学生掌握应变式传感器的基本原理和应用。
学生特点:高二年级学生已具备一定的物理基础和实验操作能力,对传感器技术有一定了解,但对实际应用尚缺乏经验。
教学要求:结合学生特点,课程设计注重理论与实践相结合,提高学生的动手操作能力和问题解决能力。
通过具体的学习成果分解,使学生在课程结束后能够达到上述课程目标。
后续教学设计和评估将以此为基础,确保课程目标的实现。
二、教学内容1. 应变式传感器原理及结构- 介绍应变式传感器的工作原理- 分析应变片的结构和材料- 讲解应变式传感器的电路连接方式2. 应变式传感器的数学模型- 探讨应变式传感器的转换关系- 引导学生建立应变式传感器的数学模型- 实例分析应变式传感器的数学模型应用3. 应变式传感器的应用- 介绍应变式传感器在工程测量中的应用领域- 分析应变式传感器的优缺点- 案例展示应变式传感器在实际项目中的应用4. 实践操作与数据处理- 安排学生进行应变式传感器的电路连接及数据采集- 指导学生进行实验数据的初步处理和分析- 引导学生针对实际问题,运用应变式传感器进行解决方案的设计5. 教学进度安排- 原理及结构:2课时- 数学模型:2课时- 应用:2课时- 实践操作与数据处理:4课时教材章节关联:- 第二章 传感器原理- 第三章 传感器数学模型- 第四章 传感器应用- 附录 实验操作指导教学内容根据课程目标进行选择和组织,注重科学性和系统性。
课程设计(论文)—应变式加速度传感器设计
一.传感器设计1、应变式加速度传感器简介能感受规定的被测量并按一定规律转换成可用信号输出的器件或装置,称为传感器,通常由敏感元件和转换元件组成。
应变式加速度传感器是一种低频传感器,由弹性梁,质量块,应变片及电桥等组成,质量块在加速度作用下,产生惯性力使弹性梁变形,引起应变片阻值发生变化,通过电桥来获取信号,是车辆振动测量常用传感器。
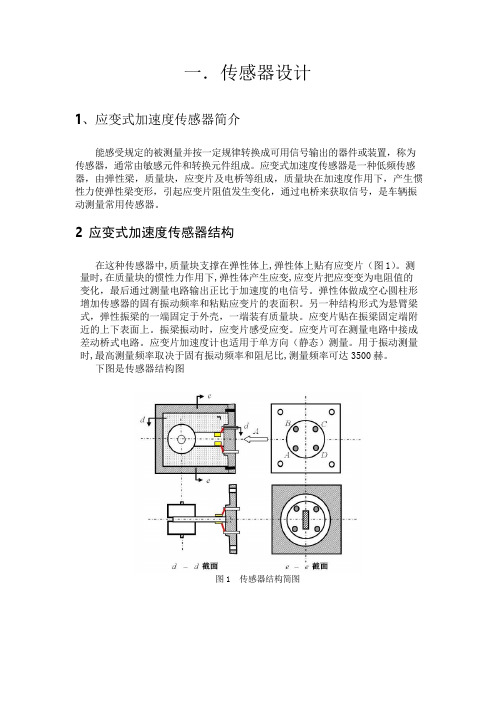
2应变式加速度传感器结构在这种传感器中,质量块支撑在弹性体上,弹性体上贴有应变片(图1)。
测量时,在质量块的惯性力作用下,弹性体产生应变,应变片把应变变为电阻值的变化,最后通过测量电路输出正比于加速度的电信号。
弹性体做成空心圆柱形增加传感器的固有振动频率和粘贴应变片的表面积。
另一种结构形式为悬臂梁式,弹性振梁的一端固定于外壳,一端装有质量块。
应变片贴在振梁固定端附近的上下表面上。
振梁振动时,应变片感受应变。
应变片可在测量电路中接成差动桥式电路。
应变片加速度计也适用于单方向(静态)测量。
用于振动测量时,最高测量频率取决于固有振动频率和阻尼比,测量频率可达3500赫。
下图是传感器结构图图1传感器结构简图Ebh H = R - R2- ⎪3 应变式加速度传感器特点这种结构灵敏度高,但体积较大,实际应用中需要硅油提供大的阻尼力应变式振动传感器的主要优点是低频响应好,可以测量直流信号(如匀加速度)。
4.计算设计:设计步骤根据设计指标估计如下结构参数: 梁长度:L (mm):11 梁宽度:b (mm):5 梁厚度:h (mm):0.5 质量块半径:r (mm):3 质量块厚度:c (mm):4 许用应力系数取:0.55;梁根部最大应变:ε max≤400 (μ ε )。
基本原理:质量块 M 在加速度 a 作用下产生惯性力: F = Maa梁在惯性力的作用下产生应变: ε = 6Lx x2Fa应变引起应变片阻值变化Δ R ,电桥失去平衡而输出电压,通过测量电压可求得 加速度。
计算梁的最大挠度挠度反映梁质量块的活动空间⎛ B ⎫2 ⎝ 2 ⎭(mm) w = ( R - H ) - (c + 0.5h) (mm)wmax< w 0(mm)6x=1.5929⨯ 10 -4 (ε/g ) x =3.1857e-006(ε/g ) Ebh 2如图所示,代入 R=7,B=6,c=4,h=0.5,得 H= 6.7544e-004mm, w =0.0021mm壳体质量: m =壳体体积 ⨯ 壳体材料密度 0质量块质量: m =质量块体积 ⨯ 质量块材料密度1弹性梁质量: m = 梁体积 ⨯ 梁材料密度(g) 2 硅油质量: m = 充油空间 ⨯ 硅油密度3质量块等效质量: M = m +m2(kg )1由上面给出的数据,可得 m =1.8g , m =0.216g12得 M=0.0105kg 。
传感器课程设计(论文)
第1章绪论1.1 传感器的定义能感受规定的被测量件并按照一定的规律转换成可用信号的器件或装置,通常由敏感元件和转换元件组成”。
传感器是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
它是实现自动检测和自动控制的首要环节。
1.2 温度传感器的组成通常,温度传感器由敏感元件和转换元件组成。
但是由于温度传感器输出信号一般都很微弱,需要有信号调节与转换电路将其放大或变换为容易传输、处理、记录和显示的形式。
随着半导体器件与集成技术在传感器中的应用,传感器的信号调节与转换可以安装在传感器的壳体里或与敏感元件一起集成在同一芯片上。
因此,信号调节与转换电路以及所需电源都应作为传感器的组成部分。
常见的信号调节与转换电路有放大器、电桥、振荡器、电荷放大器等,它1.3 传感器的分类可以用不同的观点对传感器进行分类:它们的转换原理(传感器工作的基本物理或化学效应);它们的用途;它们的输出信号类型以及制作它们的材料和工艺等。
根据传感器工作原理,可分为物理传感器和化学传感器二大类:传感器工作原理的分类物理传感器应用的是物理效应,诸如压电效应,磁致伸缩现象,离化、极化、热电、光电、磁电等效应。
被测信号量的微小变化都将转换成电信号。
化学传感器包括那些以化学吸附、电化学反应等现象为因果关系的传感器,被测信号量的微小变化也将转换成电信号。
有些传感器既不能划分到物理类,也不能划分为化学类。
大多数传感器是以物理原理为基础运作的。
化学传感器技术问题较多,例如可靠性问题,规模生产的可能性,价格问题等,解决了这类难题,化学传感器的应用将会有巨大增长。
1.3.1 传感器按照其用途分类压力敏和力敏传感器位置传感器液面传感器能耗传感器速度传感器加速度传感器射线辐射传感器热敏传感器24GHz雷达传感器1.3.2 传感器按照其原理分类振动传感器湿敏传感器磁敏传感器气敏传感器真空度传感器生物传感器等。
应变式传感器课程设计

应变式传感器课程设计一、课程目标知识目标:1. 学生能理解应变式传感器的工作原理,掌握其基本结构与应用领域。
2. 学生能掌握应变式传感器的数学模型,并运用相关公式进行计算。
3. 学生能了解传感器在工程测量和自动控制中的重要性。
技能目标:1. 学生具备动手搭建简单应变式传感器电路的能力,并能进行数据采集与分析。
2. 学生能运用所学知识解决实际测量问题,设计简单的传感器应用方案。
情感态度价值观目标:1. 学生培养对传感器技术研究的兴趣,增强探索精神和创新意识。
2. 学生认识到传感器在科技发展和国民经济建设中的重要作用,树立正确的价值观。
3. 学生在小组合作中培养团队协作精神,提高沟通与交流能力。
课程性质:本课程为高二年级物理选修课程,以实践操作和理论学习相结合的方式进行。
学生特点:学生具备一定的物理基础和动手能力,对新兴技术有一定的好奇心。
教学要求:注重理论与实践相结合,鼓励学生动手实践,培养学生的创新能力和实际应用能力。
教学过程中关注学生的个体差异,引导他们主动参与,激发学习兴趣。
通过分解课程目标为具体学习成果,为教学设计和评估提供依据。
二、教学内容1. 应变式传感器的基本概念与工作原理- 介绍应变式传感器的定义、类型及工作原理。
- 分析应变片的结构、材料及应变效应。
2. 应变式传感器的数学模型与计算方法- 探讨应变式传感器的数学模型,包括应力、应变与电信号的关系。
- 介绍相关计算公式,如灵敏系数、测量范围等。
3. 应变式传感器的应用领域- 分析应变式传感器在工程测量、自动控制等领域的应用案例。
- 引导学生了解传感器在现代科技发展中的重要作用。
4. 应变式传感器电路设计与数据采集- 学习并搭建简单的应变式传感器电路,了解电路元件的作用。
- 学习使用数据采集器进行数据采集、处理与分析。
5. 实践操作与创新能力培养- 安排学生进行实际操作,如制作应变式传感器、搭建电路等。
- 引导学生运用所学知识解决实际问题,培养学生的创新能力。
应变式加速度传感器设计
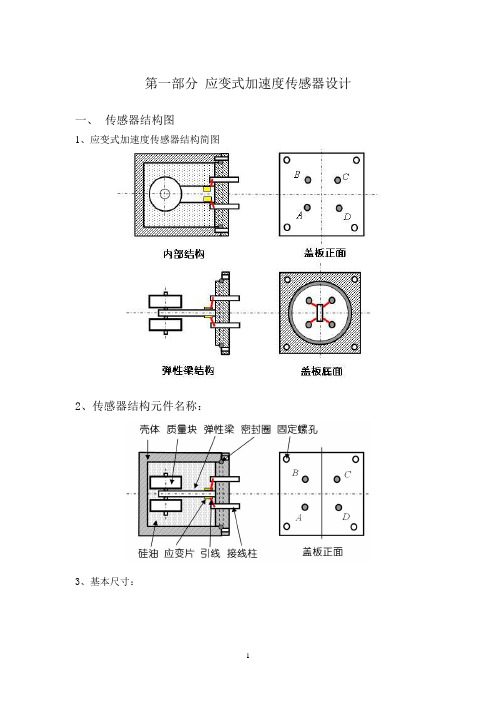
第一部分应变式加速度传感器设计一、传感器结构图1、应变式加速度传感器结构简图2、传感器结构元件名称:3、基本尺寸:4、传感器弹性梁结构二、 材料表1、弹性梁材料(按学号最末一位数选取)2、壳体、质量块材料(1)质量块材料:碳钢弹性模量29N/m 102E ´=, 密度3g/cm 85.7=r(2)壳体材料:硬铝弹性模量211N/m 1072.0E ´=, 密度3g/cm 86.2=r3、阻尼材料、应变片(1)阻尼材料:甲基硅油密度()3g/cm 95.0=r , 阻尼比5.0=V(2) 应变片: 硅应变片三、基本原理质量块M 在加速度a 作用下产生惯性力:Ma F a =,梁在惯性力的作用下产生应变:a xx F EbhL 26=e 应变引起应变片阻值变化ΔR ,电桥失去平衡而输出电压,通过测量电压可求得加速度。
四、设计步骤1、初步确定梁和质块的结构参数根据给定的传感器结构尺寸和设计指标,初步确定弹性梁和质块的结构参数:o 梁长度:L (mm);o 梁厚度:h (mm); o 梁宽度:b (mm); o 质量块半径:r (mm); o 质量块厚度:c (mm);2、总质量及等效质量计算o 壳体质量:)g (壳体材料密度壳体体积0´=mo 质量块质量:)g (质量块材料密度质量块体积1´=mo 弹性梁质量:)g (梁材料密度梁体积2´=mo 质量块等效质量(惯性质量):)kg (621m m M += o 硅油质量:)g (硅油密度充油空间3´=m3、计算梁的最大允许挠度挠度反映梁质量块的活动空间)mm (222÷øöçèæ--=B R R H)mm ()5.0()(0h c H R w +--=要求:)mm (0max w w <4、梁应变灵敏度计算(单臂)一个g 作用时,质量块产生的惯性力:)N (807.9)N (´==M Mg F g 贴片处梁长(根据应变片尺寸决定):)mm (3-³L L x 梁应变灵敏度(贴片处的应变):)ε/g (62EbhL F x g g =e5、梁根部应变检查梁根部允许最大应变:)ε(0004.0max £L e50g 作用时,质量块产生的惯性力:g a F Ma F ´==50)N ( 梁根部应变:max 2)ε(6L a L Ebh LF e e £=如梁根部应变超限,修改参数重新计算。
传感器课程设计加速度传感器
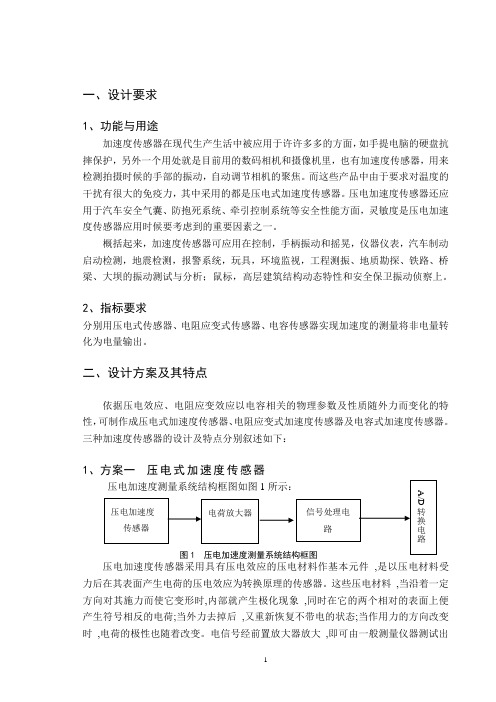
一、设计要求1、功能与用途加速度传感器在现代生产生活中被应用于许许多多的方面,如手提电脑的硬盘抗摔保护,另外一个用处就是目前用的数码相机和摄像机里,也有加速度传感器,用来检测拍摄时候的手部的振动,自动调节相机的聚焦。
而这些产品中由于要求对温度的干扰有很大的免疫力,其中采用的都是压电式加速度传感器。
压电加速度传感器还应用于汽车安全气囊、防抱死系统、牵引控制系统等安全性能方面,灵敏度是压电加速度传感器应用时候要考虑到的重要因素之一。
概括起来,加速度传感器可应用在控制,手柄振动和摇晃,仪器仪表,汽车制动启动检测,地震检测,报警系统,玩具,环境监视,工程测振、地质勘探、铁路、桥梁、大坝的振动测试与分析;鼠标,高层建筑结构动态特性和安全保卫振动侦察上。
2、指标要求分别用压电式传感器、电阻应变式传感器、电容传感器实现加速度的测量将非电量转化为电量输出。
二、设计方案及其特点依据压电效应、电阻应变效应以电容相关的物理参数及性质随外力而变化的特性,可制作成压电式加速度传感器、电阻应变式加速度传感器及电容式加速度传感器。
三种加速度传感器的设计及特点分别叙述如下:1、方案一压电式加速度传感器压电加速度测量系统结构框图如图1图1压电加速度传感器采用具有压电效应的压电材料作基本元件,是以压电材料受力后在其表面产生电荷的压电效应为转换原理的传感器。
这些压电材料,当沿着一定方向对其施力而使它变形时,内部就产生极化现象,同时在它的两个相对的表面上便产生符号相反的电荷;当外力去掉后,又重新恢复不带电的状态;当作用力的方向改变时,电荷的极性也随着改变。
电信号经前置放大器放大,即可由一般测量仪器测试出电荷(电压)大小,从而得出物体的加速度图2 压电式加速度计的幅频特性曲线加速度计的使用上限频率取决于幅频曲线中的共振频率图2。
方案二电阻应变式加速度传感器应变式加速度传感器主要用于物体加速度的测量。
其基本工作原理是:物体运动的加速度与作用在它上面的力成正比,与物体的质量成反比,即a=F/m。
应变片式加速度传感器设计

应变片式加速度传感器设计1.设计原理2.结构设计传感器的主要结构包括应变片、桥路电路和信号处理电路。
2.1应变片应变片是传感器的关键部件,通常采用金属材料或半导体材料制成。
当物体受到加速度的作用时,应变片会发生形变,形变的大小与加速度呈正比。
应变片上的应变电阻会随着形变发生变化,从而产生电阻值的变化。
2.2桥路电路为了能够测量应变片上电阻值的变化,需要构建一个桥路电路。
常见的是通过四个电阻构成的Wheatstone桥路。
其中两个电阻为应变片上的电阻,另外两个电阻为参考电阻。
当应变片发生形变,引起电阻值的变化时,桥路电路会输出一个电压信号。
2.3信号处理电路传感器的信号处理电路用于将桥路电路输出的电压信号转换为对应的加速度值。
常见的信号处理电路包括放大电路、滤波电路和模数转换电路。
放大电路用于放大传感器输出的微弱电压信号,滤波电路用于滤除高频杂波,模数转换电路将模拟电压信号转换为数字信号。
3.应用3.1工业控制在工业控制中,可以使用应变片式加速度传感器测量震动、振动和冲击等物理量,从而监测设备和机械的状态,提前预警并进行故障诊断。
3.2车辆安全在汽车、火车等交通工具中,应变片式加速度传感器可以用于检测车辆发生的碰撞、刹车、加速等事件,从而触发安全气囊、防滚系统等被动安全装置的工作。
3.3航空航天在航空航天领域,应变片式加速度传感器可以用于测量飞机、火箭等飞行器所受到的加速度变化,从而检测飞行器的动态行为和状态。
总结:应变片式加速度传感器基于应变电阻效应,通过测量电阻值的变化,实现对物体加速度的测量。
传感器结构包括应变片、桥路电路和信号处理电路。
应变片式加速度传感器在工业控制、车辆安全、航空航天等领域有广泛的应用。
基于应变传感器课程设计
基于应变传感器课程设计一、课程目标知识目标:1. 学生能够理解应变传感器的定义、工作原理及在工程领域的应用。
2. 学生能够掌握应变传感器的基本电路连接和数据处理方法。
3. 学生能够描述应变传感器在智能监测系统中的作用。
技能目标:1. 学生能够独立完成应变传感器的电路连接,并进行数据采集。
2. 学生能够运用数据处理软件对采集到的数据进行解析,得出有效结论。
3. 学生能够通过小组合作,设计并实施一个基于应变传感器的实际应用项目。
情感态度价值观目标:1. 学生能够认识到传感器技术在日常生活和工程领域的重要性,增强对科学技术的兴趣。
2. 学生在课程实践中培养动手能力、团队协作能力和问题解决能力。
3. 学生能够关注传感器技术的发展,树立创新意识,提高对新技术、新理念的学习热情。
课程性质:本课程为实践性较强的课程,结合理论知识,注重培养学生的动手操作能力和实际应用能力。
学生特点:学生处于高年级阶段,具备一定的物理知识和电路基础,具有较强的求知欲和动手能力。
教学要求:教师需引导学生通过实践操作,将理论知识与实际应用相结合,提高学生的综合素养。
在教学过程中,注重分层指导,关注学生的个体差异,确保每个学生都能在课程中取得进步。
同时,注重培养学生的团队合作精神和创新能力,为学生的未来发展奠定基础。
二、教学内容1. 应变传感器的基本概念:介绍应变传感器的定义、分类及其在工程领域的应用。
- 教材章节:第二章第二节- 内容:应变片的原理、结构及特性。
2. 应变传感器的工作原理:分析应变传感器的工作过程,理解其转换原理。
- 教材章节:第二章第三节- 内容:应变片的电桥连接方式、应变传感器的工作原理。
3. 应变传感器的电路连接与数据处理:学习应变传感器的电路连接方法,掌握数据处理技巧。
- 教材章节:第二章第四节- 内容:电桥电路的连接、数据采集、滤波和放大等处理方法。
4. 应变传感器的实际应用:探讨应变传感器在智能监测、物联网等领域的应用案例。
应变式加速度传感器
应变片贴法示意图
3.电桥电路设计
将四片应变片接入电桥四臂,应变符号相反的接入相邻 桥臂,构成如图所示的全桥差动电路。使 R1=R2=R3=R4,ΔR1=ΔR2=ΔR3=ΔR4,得U0=E×ΔR1/R1。
1.全桥电路没有线性误差。 2.电压灵敏度是单只应变片的4倍 3.具有温度补偿。
4.易获得高稳定的直流源,输出直流, 精度高。
R l s R ls
l ; s 2r ; r l
ls r r
l
R (1 2)
R
对于金属电阻丝来说:(1+2µ)远大于电阻率的 变化率。所以电阻的变化与应变成正比。
• 设计的动态模型
设计的整体思路:
a w x • 加速度
2
W为工作频率
m ax xmax为装置弹性元件最大位移
F(加速度)
• 当作用与质量块上的力平衡时,
动力学方程为:
m
dxm dt 2
2
a1
d
(xm dt
x)
k
(xm
x)
0
根据二阶传感器的幅频响应特性,得到
加速度传感器 放大与滤波
加速度传感器的副频特性与相频特性:
xm (w wn )2 4 2 (w/wn )2
arctan12((ww//wwnn))2
w为振动的角频率 wn为固有角频率
A/D转换 主主机机 输输出出
2.传感器结构设计
• 应变式加速度传感器结构如图所示,在等强度梁的自由 端安装质量块,梁的另一端固定在壳体上。梁的上下面各 分布两个电阻应变片敏感元件。为了调节震动系统阻尼系 数,在壳体内充满硅油。
大三暑期传感器原理实习报告-应变式加速度传感器设计
大三暑期传感器原理实习报告-应变式加速度传感
器设计
应变式加速度传感器设计
——大三暑期传感器原理实习报告
(西南交大机械制造及自动化张其美19990780)
1、设计任务及技术指标
应变式加速度传感器的结构设计、特性曲线绘制等。
测量范围:20g;精度:1%;尺寸:不大于;频响:0.1~100hz;重量:不大于20g;共桥电压:5v~24v (dc)。
2、结构设计
(1)采用等强度梁结构;
(2)材料选择及尺寸确定;
a、壳体及质量块选用碳钢
弹性模量:(与疲劳破坏有关)
泊松比:
b、弹性元件(梁)选用铍青铜(或硅梁)
弹性模量:
密度:
抗拉强度:
c、许用应力:(简单梁)取
(3)设计计算;
设计原则:
a、在最小载荷f和相应的最大绕度或位移为已知时,可先根据结构要求确定长度,然后在计算和。
b、设计时先保证有足够的灵敏度,然后在尽可能提高(固有频率)
c、质量块相对于基座的位移可按下列原则确定:
当时,,其中a为被测加速度。
设计步骤:
a、先估计,忽略,确定。
取,则
b、估计和
取。
应变式加速度传感器
R
对于金属电阻丝来说:(1+2µ)远大于电阻率的 变化率。所以电阻的变化与应变成正比。
• 设计的动态模型
设计的整体思路:
a w x • 加速度
2
W为工作频率
m ax xmax为装置弹性元件最大位移
F(加速度)
• 当作用与质量块上的力平衡时,
动力学方程为:
m
dxm dt 2
2
a1
d
(xm dt
A/D转换 主主机机 输输出出
2.传感器结构设计
• 应变式加速度传感器结构如图所示,在等强度梁的自由 端安装质量块,梁的另一端固定在壳体上。梁的上下面各 分布两个电阻应变片敏感元件。为了调节震动系统阻尼系 数,在壳体内充满硅油。
应变片贴法示意图
3.电桥电路设计
将四片应变片接入电桥四臂,应变符号相反的接入相邻 桥臂,构成如图所示的全桥差动电路。使 R1=R2=R3=R4,ΔR1=ΔR2=ΔR3=ΔR4,得U0=E×ΔR1/R1。
x)
k
(xm
x)
0
根据二阶传感器的幅频响应特性,得到
加速度传感器 放大与滤波
加速度传感器的副频特性与相频特性:xm x (1 wn )2x
2
1 (w wn )2 4 2 (w/wn )2
arctan12((ww//wwnn))2
w为振动的角频率 wn为固有角频率
(3)电阻变化率与应变的线性关系:
原始电阻:
R l
s
结论:建立了加速度与 电阻变化率的线性关系。
当电阻受拉后,引起电阻的相对变化量为:
R l s R ls
l ; s 2r ; r l
应变片式加速度传感器设计

应变片式加速度传感器姓名:学号:院(系):电气工程学院专业名称:电气工程及其自动化班级:电气2(专升本)2015年5月20日说明书摘要通过应变片感应加速度的变化,并把应变片接到直流电桥中,通过电阻的变化引起直流电桥电压的变化,再将电桥输出的电压通过逻辑电路放大输出,然后将输出的电压信号送到控制中心,从而达到对加速度进行实时监控的目的。
其结构由(1)惯性质量块(2)应变量(3) 硅油阻尼液(4)应变片(5)温度补偿电阻(6)绝缘套管(7)接线柱(8)电缆(9)压线柱(10)壳体(11)限位块组成。
应变片式加速度传感器通过敏感栅将低频运动物体的加速度转化为应变片的应变,引起电桥桥臂电阻的变化,经过温度补偿、放大后输出加速度信号。
其特点为应变片式加速度传感器具有体积小、低功耗、结构简单、抗干扰能力强、运行稳定、经济性好。
摘要附图应变式加速度传感器示意图权利要求书1、通过应变片感应加速度的变化,并把应变片接到直流电桥中,通过电阻的变化引起直流电桥电压的变化,再将电桥输出的电压通过逻辑电路放大输出,然后将输出的电压信号送到控制中心,从而达到对加速度进行实时监控的目的。
其结构由(1)惯性质量块(2)应变量(3 )硅油阻尼液(4)应变片(5)温度补偿电阻(6)绝缘套管(7)接线柱(8)电缆(9)压线柱(10)壳体(11)限位块组成。
电桥采用直流12V电源供电,采用稳压的直流电源供电,运放器采用双电源供电,电源电压为±12V。
2、加速度传感器的敏感轴检测输入加速度,并将其作用转换为电阻应变片阻值的变化,通过变送电路,将这种变化转换为对应的电压输出,从而达到测量加速度的目的。
传感器的主要量程:±20g;输出:0~5V;零位输出:2.5V,用应变片测量的应变是通过测量敏感栅的电阻相对变化来得到。
应变片灵敏度系数很小(K≈2),而机械应变一般在10με~3000με之间(有时也可达到6000με),电阻相对变化是很小的,需要采用差动电桥。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.传感器设计1、应变式加速度传感器简介能感受规定的被测量并按一定规律转换成可用信号输出的器件或装置,称为传感器,通常由敏感元件和转换元件组成。
应变式加速度传感器是一种低频传感器,由弹性梁,质量块,应变片及电桥等组成,质量块在加速度作用下,产生惯性力使弹性梁变形,引起应变片阻值发生变化,通过电桥来获取信号,是车辆振动测量常用传感器。
2 应变式加速度传感器结构在这种传感器中,质量块支撑在弹性体上,弹性体上贴有应变片(图1)。
测量时,在质量块的惯性力作用下,弹性体产生应变,应变片把应变变为电阻值的变化,最后通过测量电路输出正比于加速度的电信号。
弹性体做成空心圆柱形增加传感器的固有振动频率和粘贴应变片的表面积。
另一种结构形式为悬臂梁式,弹性振梁的一端固定于外壳,一端装有质量块。
应变片贴在振梁固定端附近的上下表面上。
振梁振动时,应变片感受应变。
应变片可在测量电路中接成差动桥式电路。
应变片加速度计也适用于单方向(静态)测量。
用于振动测量时,最高测量频率取决于固有振动频率和阻尼比,测量频率可达3500赫。
下图是传感器结构图图1 传感器结构简图3 应变式加速度传感器特点这种结构灵敏度高,但体积较大,实际应用中需要硅油提供大的阻尼力应变式振动传感器的主要优点是低频响应好,可以测量直流信号(如匀加速度)。
4.计算设计:设计步骤根据设计指标估计如下结构参数: 梁长度:L (mm):11 梁宽度:b (mm):5 梁厚度:h (mm):0.5 质量块半径:r (mm):3 质量块厚度:c (mm):4 许用应力系数取:0.55;梁根部最大应变:εmax ≤400 (με)。
基本原理:质量块M 在加速度a 作用下产生惯性力:a F Ma =梁在惯性力的作用下产生应变:26xx a L F Ebh ε=应变引起应变片阻值变化ΔR ,电桥失去平衡而输出电压,通过测量电压可求得加速度。
计算梁的最大挠度挠度反映梁质量块的活动空间(mm)H R = 0()(0.5)(mm)w R H c h =--+max 0(mm)w w <如图所示,代入R=7,B=6,c=4,h=0.5,得H= 6.7544e-004mm, 0w =0.0021mm 壳体质量:0m =壳体体积⨯壳体材料密度 质量块质量:1m =质量块体积⨯质量块材料密度弹性梁质量:(g)梁材料密度梁体积⨯=2m 硅油质量:硅油密度充油空间⨯= 3m 质量块等效质量:)(621kg m m M += 由上面给出的数据,可得1m =1.8g ,2m =0.216g 得M=0.0105kg 。
质量产生的最大惯性力:max (N)a F Ma = 其中max a =50g=4902/s m ,所以a F =5.145N 。
许用应力:b T σσ⨯=5.0=8105⨯)N/m (2贴片处梁长(根据应变片尺寸决定):)(83mm l l x =-=贴片处的应变:26Ebh L F x a x =ε=1.5929410-⨯)ε/g ( 静态应变灵敏度:26Ebh MgL s xg ==3.1857e-006)ε/g ( 贴片处最大应变:g S a ⨯=max max ε=0.0016)ε(>x ε 梁根部应变: 26EbhL F a L =ε=2.19410-⨯)ε(0004.0)ε(≤,满足条件。
梁端宽度校核: Ta T h LF b σσ26==4.6870e-004<b=5mm 单臂工作时的计算公式:梁自由端静挠度: 334EbhMgL w g ==7.0670e-007m 梁自由端最大动挠度:=m ax w g w a ⨯=max =3.4628e-004m<0w =0.0021mm无阻尼固有频率:ML Ebh f n 334π21==592.6741HZ 有阻尼固有频率:=c f 21ς-=n c f f =513.2708HZ>291HZ,满足条件。
单臂工作时的电桥输出电压:14O E U U δ≈-其中:Ue 为供桥电压(v);δ为应变片电阻变化率;电桥电压灵敏度(1个g 作用下的输出电压):与静态灵敏度sg 和灵敏度系数K 成正比,则单臂电桥灵敏度:g E g E Ks U U S 4141(1)V =-≈δ=0.0012)v/g (,满足条件。
5 设计结果梁材料:1号材料(不锈钢:弹性模量E =2.14×1011N/m 2,密度385.7cm g =ρ,抗拉强度27/10100m N b ⨯=σ)质量块材料:碳钢(弹性模量29/102m N E ⨯=,密度385.7cm g =ρ) 壳体材料:硬铝(弹性模量211/1072.0m N E ⨯=,密度386.2cm g =ρ) 阻尼材料:甲基硅油(密度395.0cm g =ρ,阻尼比5.0=ζ)应变片:硅应变片(型号A ,基底尺寸245mm ⨯,硅片尺寸306.04.03mm ⨯⨯)结构尺寸表1桥臂工作方式梁长(mm)梁宽(mm)梁厚(mm)块半径(mm)块厚(mm)总质量(g)1 11 5 0.5 3 4 10.5传感器性能表2根部应变(με) 静态灵敏度(ε/g)阻尼比固有频率(Hz)有阻尼频率(Hz)供桥电压(v)电桥灵敏度(v/g)219.02 3.1857e-006 0.5 592.6741 513.2708 10 0.0012图2 设计结果简图6 传感器幅频特性计算及评价图3 传感器幅频特性(2分)二.信号调理器设计信号调理器是传感器的二次仪表。
作用:对传感器输出的微弱信号进行放大;对传感器输出的含噪信号处理,获得所需信号;为A/D转换提供具有足够能量的电压信号。
设计内容包括:电桥放大器设计;恒流电源设计;调零电路设计;标定电路设计;微积电路设计;抗混淆滤波电路设计。
技术要求:输出电压±5V、±10V;放大器增益应满足A/D转换需求;具有正负应变标定功能;调零调范围满足电阻精度和温漂要求;三阶抗混叠滤波器:截止频率满足传感器频率指标。
1、电桥放大器设计(1)电桥放大器电路原理:电桥放大器由电桥、供桥电源(恒流源)、调零电路、标定电路和运算放大器等组成。
常用的几种基本形式:电源接地式电桥放大器;电源浮地式电桥放大器;双运放差动电桥放大器;高精度电桥放大器。
考虑其性能、使用方便以及性价比等等,此设计采用的是电源接地式电桥放大器。
原理图如下图4:图4 电桥放大器有关计算: 设工作臂:)1()1(δ+=∆+=R RRR R x 由电路知:R U U I e --=1,R U I -=2,R U U I o -=-3,f R U I +=5,xR U I +=6根据节点电流定律,有:321I I I +=,654I I I +=由此解得:x f eR R R R U U 111++=+,ffoe R R R U R U U 12++=-由运放特性:-+=U U ,解得)1)(1(1fe fo R R U R R U +++⋅=δδ当1<<δ和R R f >>时,近似有fe f o R R U RR U +⋅=2δ(2)恒流源工作原理、设计计算、电路原理图恒流电源:输出电流正比于输入电压的电路,称之为电压—电流变换电路。
若输入电压恒定,其输出到负载中的电流也恒定,与负载无关,则为恒流电源。
基本的恒流源电路:输出电流为:1I IU EI R R -==当E 和R1恒定时1I 恒定,与f R 无关,输出电压为供桥电压电压和桥臂电阻可求得恒定电流。
(3)调零电路工作原理、设计计算、电路原理图电桥初始平衡状态输出应为零,如不为零,则应采取调零措施,否则影响测量精度。
实际上电桥平衡状态输出常不为零,原因: (A) 等臂电桥各桥臂电阻值不可能绝对相等; (B) 各桥臂的接触电阻、导线电阻存在差异; (C) 温度等环境因素对各桥臂的影响不完全一样; (D) 贴片产生的误差。
因此在电桥中需要设置调零电路。
调零电路结构调零电阻值计算公式 01,S S R R R R R R ⎛⎫=-=⎪∆⎝⎭(4)标定电路工作原理、设计计算、电路原理图传感器和电桥的灵敏度,在使用过程中,由于测量环境的变化、元件的老化、测量布线的不同等因素的影响,其灵敏度会发生一定的变化,需要重新标定,因此,在其二次仪表中要求设计标定电路。
标定方法:(A) 采用标定电阻标定; (B) 采用标定电桥标定。
标定电路由具有高稳定性的精密电阻组成: 电桥放大器总成:总体电路简易电桥放大器的反馈电阻值选取 对于单臂工作,有:2fe O fR U U R R R δ≈⋅+ 选择1f R 和2f R 使0U 分别为: 5v 和 10v 接地电阻:2R =1f R图5 电桥放大器总成电桥放大器参数及元件值 表32.滤波器设计(1).滤波器的作用:A.滤波器是使传感器输出的非带限信号变为带限信号,以满足抽样定理。
B.去除信号中不关心的部分,KR f 431=(2).双二次函数和一阶节函数低通双二次和一阶节函数低通双二次函数:2222()p pPpKH S S aS bS S Q ωωω==++++其中,2,p K b b ω==为极点频率;/p pa Q ω=,pQ 为极点品质因素。
低通一阶节函数:00()b H s s b =+(3).传递函数和电路图正反馈传递函数 1212211212212121()1111(1)kR R C C H s s s k R C R C R C R R C C =⎡⎤+++-+⎢⎥⎣⎦其中12ba R k R K b=+=比较系数法确定元件值比较系数1212112122121212111(1)1k b R R C C k a R C R C R C b R R C C ⎧=⎪⎪⎪++-=⎨⎪⎪=⎪⎩三个方程五个未知数,令:121C C ==解得: 121212(:12,)1b a b a C C R k R R R R a a R b ==⎧⎪⎪=+==⎪⎪⎨=⎪⎪⎪=⎪⎩即或 负反馈传递函数12122123123121()11111R R C C H s s s R R R C R R C C -=⎡⎤++++⎢⎥⎣⎦比较系数: 231211233111111b R R C C a C R R R RK R ⎧=⎪⎪⎪⎛⎫⎪++=⎨ ⎪⎝⎭⎪⎪=⎪⎪⎩ 取K Kb =-三个方程五个未知数,令:23R R R ==解得 12221241(2)22C a C K b KR aK K R R a =⎧⎪⎪=⎪+⎪⎨+=⎪⎪+⎪==⎪⎩低通一阶节电路传递函数:11111()1R C H s s R C =+比较系数,并取 C1=1,得:101R b =(4).滤波器设计计算:三阶归一化巴氏低通滤波器传递函数为:)1)(1(1)(2+++=s s s s H0a = 0.96940571 1a =0.96940571 2a =1.68974743 双二次电路类型:正反馈。