水面漂浮垃圾清理机
54.水面漂浮物自动收集器
第十届全国大学生节能减排社会实践与科技竞赛
选题推荐表
二、各个模块的设计方案
1.垃圾收集桶设计方案
垃圾收集桶采用轻质防水材料制成,具有双层结构。
内层用于收纳垃圾,外层用于放置整个收集器所包含的各种电路元器件。
具体结构如图1所示。
图1
2.抽水装置设计方案
抽水装置由小功率抽水泵构成的抽水模块组成。
抽水装置连接于垃圾收集桶的排水孔处,通过持续抽水,使收集桶中的水的液面低于河道的水平面,形成液面差,利用水的表面张力,形成一个漏斗区域,使河道的水能流入收集桶中,水面上的垃圾也能跟着流水飘入收集桶。
3.过滤装置设计
此过滤装置使用有滤网组成的过滤模块,此模块可拆卸替换,保证垃圾收集的效果。
考虑到水面垃圾的漂浮性,为了能有更好的垃圾收容性,采用软性过滤网。
过滤装备连接与垃圾收集桶与抽水装备之间,通过简单的过滤,收集到的固体垃圾,过滤所得的水可安全地通过抽水装备排出。
拟解决的问题:
(1)定位模块的精度;
(2)无线通信模块的设计与调试;
(3)水下动力系统的控制算法设计与调试。
(4)垃圾收纳装置的机械设计;。
小型水面垃圾清理机器人
小型水面垃圾清理机器人摘要:小型水面垃圾清理机器人立足于旅游景区、城市内河等狭长的静水水域,主要用于解决目前缺少高效率、高安全系数的打捞设备而给水面垃圾打捞带来的种种问题。
该机器人可对水面漂浮物等垃圾进行集拢收集、提升和储运等,可解决人工清理效率低、成本高、效果差等诸多问题,对营造绿色的生态环境有着重要的意义。
关键词:水面清理;自动化;小型水域;高效环保引言随着工业化的发展,环境问题逐渐走进了人们的视野并受到了极大的关注。
近年来,水域的污染问题越来越受到重视,尤其是旅游景区、城市内河等狭长的静水水域,由于游人或行人众多,很容易在水面积累垃圾。
目前国内对于城市河道和景区湖泊的清理主要靠人工进行,即工人驾驶机动或非机动船舶对湖面垃圾进行打捞,耗时耗力不说,而且受限颇多,无法在狭窄的水面和一些危险水域开展工作且装载垃圾较少,并且工人长期在水面劳作,安全问题也难以保证。
国外和一些国内大厂采用机动船舶进行垃圾采集,净化水域的同时又污染了空气,尽管这种方式效率很高,但仅局限于大型海面或湖面,对于城市河道和景点湖泊并不很实用。
不符合当今社会科技和工业发展的需求。
1.国内外研究现状分析1.1国外研究现状一位来自南非的企业家Richard Hardiman发明了一款名为“垃圾鲨鱼” (WasteShark)的水上机器人,它可以在港口附近自主巡游,可以“吃”掉大部分海洋垃圾。
WasteShark的出现可以持续有效地清理水面,因为水面垃圾清理的越及时,就会有更少的垃圾沉入海底。
还具备收集数据的功能,像水质、水深和天气情况等等,这些数据都能实时反馈给港口提高行船安全。
1.2国内研究现状中国科学院合肥物质科学研究院智能机械研究所研究员刘锦淮课题组研发出“风光互补”自主式水面机器人。
其采用了风力和太阳能发电动力技术,解决了续航问题,并且可以清理水面油污。
2.整体结构设计2.1垃圾清理模块采用机械臂抓取水面垃圾,传送带辅助作业。
一种微型水面垃圾清理机器人的设计

• 50•随着社会的发展进步,人们为满足自身利益的同时却往往不重视他们对环境的污染,严重影响水质甚至危害生命。
为了更加方便的进行水面垃圾清理的工作,设计了这种微型水面垃圾清理机器人,用来代替人工打捞垃圾的工作。
为了让垃圾清理船适应各种水域的工作,采用了双船体结构来增加船体的稳定性,使用远距离遥控的技术来实现对垃圾的清理。
该船的主控芯片采用的是意法半导体的STM32F103C8T6来控制,遥控器使用Arduino 遥控手柄,采用433M 无线串口通信,使能在陆地上控制远处水面的清理船。
水是生命的源泉,随着社会经济不断地发展,人们越来越注重物质层面带来的享受,然而在身心得到满足后,往往忽视了自己行为对环境造成了不良影响,河流湖泊等受到的污染程度正愈发严重。
目前水面上的废弃物主要是一些塑料、泡沫等难以降解的白色垃圾,而这些难以降解的垃圾不但不美观,对水里的生物也带来挑战。
用人工清理水面的漂浮垃圾受限颇多,无法在狭窄的河道和一些危险水域开展工作。
为更好的代替人工清理水面垃圾清理,我们以经济、可行、绿色、环保、简洁为主要设计理念,完成本次作品的设计加工。
水面漂浮垃圾的清理长期以来耗用了大量的人力物力,已有的机器人成果也因制作成本昂贵未能量产。
在这种背景之下,对机器人的环境应变能力,市场接轨程度都提出了更高的要求。
随着科学技术的不断更新发展,对不同环境的具体要求,笔者以此为基础,研究设计出了一种微型水面垃圾清理机器人。
1 技术分析与设计1.1 可行性分析为完成小型水域漂浮垃圾清理任务作为工作背景,笔者主要以机器人的操作简便,制作成本低廉,与市场接轨程度高为设计基调。
在保证合理满足水面垃圾清理功能的需求下,尽可能做到清洁、环保、易推广。
在此理念下,设计的水面垃圾清理机器人具有以下特性:(1)安全性,机器人采用遥控方式控制,可实现危险区域的远程操作,避免了人员在危险区域清理垃圾存在的安全隐患;(2)机动性,泵喷推进器可适应多种复杂水域环境,利用差速控制确保了机器人的回转;(3)实时监控,采用网桥连接树莓派进行图像传输,可远距离在线实时查看水面状况;(4)信息采集,通过远距离无线串口通信模块,采集船周围的水浊度、温度、湿度,并将数据上传至串口屏实时显示,以供使用者查看;(5)GPS 定位,使用北斗LBS 多重定位模块。
智能水面垃圾清洁机器人
智能水面垃圾清洁机器人作者:耿若楠陈沛李志文程继航卞宇宸来源:《科学导报·学术》2020年第48期随着社会的快速发展,人们的生活质量不断提高,制造的生活垃圾也越来越多。
由于环保意识的缺乏,很多生活垃圾直接或者间接被弃入江、河、湖泊之中,致使江、河、湖泊的水面上经常漂浮大量生活垃圾,部分区域如航运河道、发电站前池水污染特别严重,这些垃圾如果不及时清理,将会影响航道运行、发电机组正常运转。
另一方面,由于生活污水和工业废水大量排放,河水严重营养富集,导致水面出现了大量的浮游藻类,如不及时清理,将严重打破区域生态平衡。
为了清理这些水面漂浮垃圾,环保部门每年都要投入大量的人力、财力和物力,定时进行人工打捞。
现有的人工打捞工具均为捞勺、捞网或简单小型的打捞设备,致使人工打捞劳动强度大,工作效率低,缺乏灵活性,清理效果也不是很理想。
例如在清理河、湖水面的草生植物或是清理较大体积的垃圾时,会采用机械清理的方式,但几乎都是采用较大型机械,不仅浪费能源,而且还会产生二次污染,难以普及使用。
水是生命不可或缺的自然資源,治理水污染势在必行,因此设计一款清理人流较大的河流和湖上等一切有水域的地方的垃圾,实用性很强的水面垃圾清洁机器人是社会的需要。
(一)国、内外研究现状和发展动态目前,国内外对水面垃圾的清洁主要采用人工打捞和机械打捞两种方式。
人工打捞利用半舱式或甲板机动驳船,由环卫工人手持网兜站在甲板边上直接把垃圾捞上来,这种作业方式劳动强度大、工作环境恶劣、人身安全没有保障,不仅清理难度大、综合成本高,而且无法治理在大雨台风季节暴发的水葫芦等海域污染。
而机械打捞装置具有间断性、笨拙性、耗时性等明显缺点,并且会造成严重污染,无法适应小型河流、湖泊等水面垃圾清理的需要。
国内外在水面垃圾清理方面也有少数自动清理无人船(清洁机器人),但是船体小、垃圾收集量小、垃圾不能太大、续航时间有限。
国内的垃圾清理无人船太小,只能清理小体积较轻的漂浮物,动力不足,一次清理的时间和垃圾量都很有限,而且智能化程度低,基本上都是基于嵌入式系统,没有通用计算机平台,无法运行人工智能和复杂智能感知系统,例如没有用于复杂障碍探测和识别的激光雷达或者图像识别系统,无法在复杂河道中自主巡航和避障,因此只能算是初级无人船。
一种水面漂浮垃圾的智能收集系统

含约束的拉格朗日优化问题,具体计算公式为:
( 12)
XU- P
为 了 对 上 述 公 式 进 行 计 算 ,随 后 提 出 了 基 于 梯 度 法的分布式动态算法:
jc/y( k + \) = Xjji k) + ju^
智 能 机 器 人 系 统 配 置 (见 图 1)。该 系 统 基 于 电 动 水 下航行器,该水下航行器在负载条件下可以在水面上航
行。水下航行器长约63.5cm,宽 48.5cm,高 46.5cm,重约 25kg。摄像机舱安装在车辆顶部的前端,其 中 ,双目摄像 机 固 定 在 隔 板 上 。具 有 3-DOF的 机 械 手 放 置 在 车 辆 上 , 该机械手由三个伺服电机组成。要注意关节角度的范围 为270,以确保机械手的尾端可以移动到收集箱的内部。 因 此 ,智能机器人系统的尺寸要小到足以在小水域中使 用 ,并且其能源是清洁的,以避免二次污染。
检测到对象后,将其作为移除对象。然 后 ,KCF和三 角剖分工作不断地更新边界框并分别测量对象的位置。 2 实验结果 2 . 1 漂浮垃圾检测实验结果
为 了 实 现 垃 圾 检 测 ,建立了一个浮动垃圾数据集 (FGD ),该 数 据 集 包 含 1000张图像,覆盖了不同照明下 的 各 种 塑 料 瓶 、塑 料 袋 和 泡 沫 聚 苯 乙 烯 (见 表 1LFGD 分 为 训 练 数 据 集 (TD )和 验 证 数 据 集 (VD )。本实验中 的 GPU是 NVDIA-1080。YOLOv3 在 训 练 数 据 集 上 进 行 训 练 ,在 验 证 数 据 集 上 的 测 试 结 果 (见 表 1)。精度用 mAP来 描 述 ,计算速度用每秒帧数(中5 )来评估。结果 表 明 ,该 方 法 检 测 精 度 高 ,速度满足实时性要求。但由 于 塑 料 瓶 的 包 装 形式多样,塑料瓶的检测精度略低于
水面垃圾清理装置

水面垃圾清理装置作者:张志欣王忠禹王晓娟李银桥邓彦松来源:《世界家苑》2018年第10期摘要:本文主要是对水面垃圾清理设备的构架、动力部分、传输部分、垃圾存储部分以及其他零部件的调设、计算、校准等。
通过此次设计的成果所需实现的功能需求分析,以及实际环境的考察,研究水面垃圾清理装置的系统构成及功能的设计方法。
水面垃圾清理机器人主要针对于中小型湖、河等水域的垃圾清理,如塑料袋、饮料瓶、树枝树叶和其他易清理的水面垃圾。
实现水面垃圾清理的智能化,无需人工参与打捞,提高清理效率。
此次设计致力于节能高效、绿色环保。
另文中对设计过程中设计的配图都有精细的描述。
关键词:节能低耗;水面垃圾;环境保护;垃圾清理随着社会经济的不断发展,人们的物质生活水平也不断提高,但是对于水生态系统的污染反而变得越来重,水面垃圾污染、河道堵塞、湖泊水体变质,严重影响了生态环境的和谐发展。
起风时垃圾会随水体流动污染进一步扩散,“迁徙”的垃圾会使水体遭到更大程度的污染和破坏。
很多国家的河流、水域漂浮物污染十分严重,随着环保观念深入人心,水面垃圾清理机器的研究不断深入,也逐渐受到国内外的广泛关注。
传统的水面垃圾清理装置,主要是通过人为打捞,清理垃圾的效率非常低,而且运行成本高,劳动强度较大,人身安全也没有保证,有些区域的打捞工作仅靠人力是无法完成的。
我们设计的涡旋式水面垃圾清理机器人,以太阳能供电,通过涡旋自动吸收垃圾,并通过控制系统实现远程控制,用以降低人工打捞的难度,且达到节约并高效利用能源的效果,具有环保性,活动灵活,方便快捷,适应力强,安全性高,可广泛应用于人工湖等小型水域的漂浮物清理工作。
此款机器人外观萌宠、智能控制、行动便捷,集自动吸收系统、太阳能供电系统及控制系统于一身,具有操作简单可靠,收集彻底,效率高,打捞水域广等优势,且具有远程控制清理垃圾、节能低耗等功能。
大大的节省人力物力支出。
与此同时还能提升景区观赏性,产品不仅具有保护环境的功能,还有可以融入到周围环境,提升视觉,起到宣传效果。
一种水面垃圾清理机器人设计
一种水面垃圾清理机器人设计
张芙蓉;汤泽军
【期刊名称】《技术与市场》
【年(卷),期】2022(29)9
【摘要】针对城市生活体中的人工湖、水上游乐区、湿地公园等水面垃圾人工清
理方式效率低的问题,设计了一种专用于水面垃圾清理的机器人方案。
机器人能在
狭小或较浅且有水草分布的水域自动识别水面垃圾,并快速将漂浮垃圾打捞到垃圾
收集袋,并运至指定地点。
机器人系统由驱动模块、垃圾收集模块、中央控制模块、传感模块组成(垃圾收集舱、动力装置、捕捞机构和控制舱等),具有安装容易、故障率低、稳定性高的优点。
【总页数】4页(P8-11)
【作者】张芙蓉;汤泽军
【作者单位】长沙航空职业技术学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.一种水面垃圾清理机器人
2.一种节能环保型水面垃圾清理船设计
3.一种微型水面垃圾清理机器人的设计
4.小型水面垃圾清理机器人的设计与实现
5.一种小型水域
水面垃圾清理机器人
因版权原因,仅展示原文概要,查看原文内容请购买。
水上漂浮物自动清理机器人”项目研究结题报告

“水上漂浮物自动清理机器人”项目研究结题报告学生姓名:鲍陈磊于一帆陈姝妍刘冰学院名称:电气工程及自动化学院指导老师:雷呈喜助理工程师1课题研究目的本课题所要研制的水面漂浮物自动清理机器人是一种新型高科技环保产品,主要用于水面漂浮物(如漂浮垃圾)的打捞和收集工作。
其自动化程度较高,能完成对各种水面漂浮垃圾的扫描、和收集工作,并能有效回避障碍物,收集满后还能自动返回,同时也可以将其改为由工人遥控完成,能适应各种情况下的工作,从而使得使用的范围更加广泛,效果更加显著。
2课题背景近年来,随着工业的发展,我国水体污染日益加剧,社会影响巨大,造成的经济损失更是无以估量。
在经济不断发展的今天,人们已经越来越意识到环境保护的重要性,特别是水体保护的重要性,这不仅仅是美化我们的生活环境,创造更加适宜的生存空间,而且更是对经济、对我们的日常生活有着十分深刻的现实对于水面漂浮物的治理,国外已研制成功大型综合清污船等自动化水平比较高的水面固体垃圾收集机械,定时在河道上巡航清污,用较小的经济成本换来了较大的环境效益。
而国内的治理现状仍然停留在人工打捞阶段,效率比较低,工作强度比较大,亟需实用的机械化设备参与清污。
于此同时,人工打捞方式还有一定的限制,对于水面比较狭窄的地方,或是水较少,水深小于50cm左右的地方,就无法进行正常的打捞工作;同时,对于一些污染比较严重的水体,人工打捞也就不太合适了。
我们研制的水上漂浮物自动清理机器人模型,就是为了改进以上人工打捞的不足而设计的,可以在很大程度上提高固体垃圾收集的效率和垃圾收集的范围,降低成本,减少工作人员的工作强度。
它可以实现自动扫描、寻找、识别各种漂浮于水面之上的垃圾,自动地运动到垃圾处收集垃圾,把收集到的废物放在回收箱。
同时可以实现人工遥控控制,以满足各方位的需要。
3课题研究主要内容我们设计制作的水上漂浮物自动清理机器人模型如下图所示,由机械部分和电子部分构成。
4 成果介绍4.1机械部分设计4.1.1推进机构采用这种推进方式因转轴高于水面一定距离,不易被缠住,而且运行效率较高,运行时平稳。
水面漂浮垃圾收集机器人的系统设计
水面漂浮垃圾收集机器人的系统设计黄庆典(广东慧航物联科技有限公司,广东东莞523000)摘要:如今各水域与河道上存在越来越多的漂浮垃圾,影响了城市的形象,破坏了水域生物的生态环境,假若漂浮垃圾长时间不清理,还会散发出恶臭的气味,危及居民健康。
针对该问题,设计出一种水面漂浮垃圾收集机器人,清洁人员能够根据机器人传输的视频图像远程控制该机器人收集处理水面上的漂浮垃圾。
机器人系统由驱动模块、垃圾收集模块、中央控制模块、传感模块组成,具有安装容易、故障率低、稳定性高的优点。
关键词:水面漂浮;机器人;垃圾收集0引言进入21世纪以来,快速增长的生活消费与工厂生产一定程度上导致了水域受垃圾污染的情况加重。
水域污染不仅影响了各大生态系统,同时影响着居住环境、居民的身体健康[1]。
目前,水面漂浮垃圾治理方法普遍是清洁人员利用船只配合打捞工具在污染水域巡航打捞。
该方法不仅工作效率不高,而且清洁工的劳动强度大,易受烈日寒冬影响,并且腐臭环境对清洁工的身体有不良影响。
因此,有必要设计出一种远程控制的水面漂浮垃圾收集机器人,代替清洁人员在恶劣的工作环境下作业。
为使机器人工作时具有良好的可持续性与可操控性,本文结合光伏技术与图像传输技术,设计了一种可远程控制的水面漂浮垃圾收集机器人,以改善清洁工人工作条件,提高工作效率,降低水域治理成本。
该系统采用模块化设计,机器人由驱动模块、垃圾收集模块、中央控制模块、传感模块组成,可稳定高效地完成工作任务。
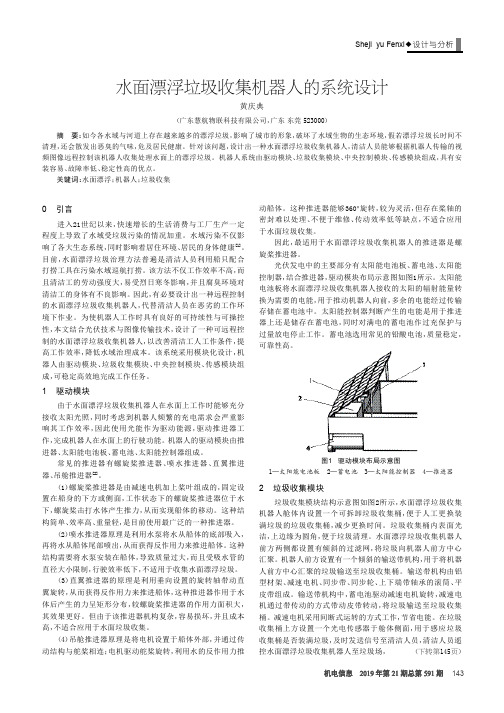
1驱动模块由于水面漂浮垃圾收集机器人在水面上工作时能够充分接收太阳光照,同时考虑到机器人频繁的充电需求会严重影响其工作效率,因此使用光能作为驱动能源,驱动推进器工作,完成机器人在水面上的行驶功能。
机器人的驱动模块由推进器、太阳能电池板、蓄电池、太阳能控制器组成。
常见的推进器有螺旋桨推进器、喷水推进器、直翼推进器、吊舱推进器[2]。
(1)螺旋桨推进器是由减速电机加上桨叶组成的,固定设置在船身的下方或侧面,工作状态下的螺旋桨推进器位于水下,螺旋桨击打水体产生推力,从而实现船体的移动。
SUNY自动漂浮物收集器

方式三是机械化程度最高的方法在大面积重污染的场合运用最多但是在较小面积或轻污染场合使用时设备投资成本过高运行成本也过高不仅如此在水面垃圾较多的场合还易发生系统堵塞的问题
SUNY 自动漂浮物收集器
一、用途
1、水面浮油去除 河湖以及海洋水面经常会出现浮油污染的
情况。浮油污染不仅会带来水面感官的恶化, 更会使得水体复氧能力下降,导致水体缺氧, 进而导致水中鱼虾死亡,水体生态恶化。目前 浮油收集的主要方式一是用竹竿等条状物将 浮油赶到一块,再用水勺等工具将浮油打捞起 来;二是用吸油毡等吸附材料在水面上将浮油 吸附后再捞到岸上处理;三是采用水泵抽吸靠 近水面处的油水混合物到油水分离装置,通过 油水分离装置处理后,清水回到水体,浮油则被截留在装置内另行处置。
SUNY 自动漂浮物收集器提供一种结构简单、浮油收集效果好、机械化程度较高、系统不易堵塞, 同时设备投资和成本较低的水面浮油收集装置,完美地解决了,虽 然可以通过人工打捞去除,但由于浮萍在量少 时分散不易打捞,而因打捞不及时造成浮萍疯 长使得后期打捞量成倍增加,人工打捞强度很 大;在经人工打捞之后,仍然会残留大量浮萍, 若不能清除干净,不久之后水面又会被浮萍再 次覆盖。
SUNY 自动漂浮物收集器可将上浮底泥温 和地吸入,即使破碎也不会流出,且在 SUNY 自动漂浮物收集器处下沉的底泥二次上浮后 仍被锁定其中,从而保证对上浮底泥优良的收 集效果。 4、水面垃圾去除
一种水面漂浮物自动清理机器人结构设计

一种水面漂浮物自动清理机器人结构设计史浩辉;李莉莉;付宗国;罗准;官俊【摘要】为了解决传统的垃圾打捞船难以解决的小型水面悬浮物的问题,提出一种利用“漩涡”和网筛工作原理,并以太阳能为新能源的一种水面漂浮物清理机器人的设计方案.实现对水体的“二次清理”,也可在水面航行过程或在静止在某固定点完成垃圾的收集,方便灵活.【期刊名称】《机械工程师》【年(卷),期】2019(000)001【总页数】3页(P110-112)【关键词】新能源;机器人;网筛过滤;环保设备【作者】史浩辉;李莉莉;付宗国;罗准;官俊【作者单位】浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022;浙江海洋大学船舶与机电工程学院,浙江舟山316022【正文语种】中文【中图分类】TP242.30 引言当前国内外对于封闭或小型水域垃圾清理研究较少,水上垃圾清理主要以人工清理为主。
虽然目前国内外所开发出的垃圾清理船种类繁多,作用原理也不一而足,但它们大都是定位于江、河、湖、海等大面积水域的垃圾清理,而且只能对于水中的较大体积的漂浮物进行清理,而对于水中较小的悬浮垃圾却是束手无策,不能对水体的清洁作进一步的处理。
本文设计了一种水面漂浮物自动清理机器人,不仅可以清理较大体积漂浮物,而且可以清理水面小型的悬浮物(如浮萍、藻类、果皮等)[1],解决了传统的垃圾打捞船难以解决的小型水面悬浮物的问题。
1 水面漂浮物清理机器人1.1 水面机器人主要结构水面漂浮物自动清理机器人,包括船体及船体的前后两侧分别设置的前阀门和后阀门,且船体中设有网筛。
船体的内部为用于放置网筛的主舱室、船体前舱、船体后舱、片体内隙、船舱侧隙组成;前舱阀门的启闭型式为滑移式,并且船体前舱和船体后舱通过船舱侧隙连接。
船体底部安装有斗状套筒,斗状套筒末端与水泵进水口相连;在水泵出水口安装电磁阀,在船体底部后侧对称安装两个水下推进器;且水下推进器上都设有推进器螺旋桨。
水面垃圾自动清理机毕业论文

水面垃圾自动清理机毕业论文摘要本文主要是对水面垃圾自动打捞船的船体结构、动力装置、传输装置、垃圾存储装置以及其他零部件的设计、计算、校核等。
在了解此次设计的成果所需实现的功能需求,以及实际环境背景的情况下,研究水面垃圾自动清扫机的系统构成及功能的设计方法。
水面垃圾自动打捞船针对水面环境污染的问题,致力于中小型湖泊河流等水域的固体垃圾清理,如塑料袋、饮料瓶,树枝树叶以及其它易清理的水面垃圾。
实现水面垃圾清理的机械化与自动化,整个打捞过程无需人工参与,安全性非常好,效率大约是人工打捞的几百倍,水面越大、风浪越大效果越显著。
此次设计除了动力装置与其他船类相同,传输装置以及垃圾存储装置都有一定的独特设计。
采用链齿轮与链条的传动带动传输带的形式,以及船体前方两个旋转叶片的设计都使得水面垃圾的收集更加有效率。
此外,垃圾存储装置采用的是三个可替换式的存储箱,其底部设计为多孔式,使得水面垃圾的收集更加方便,可执行性有所加强。
本文对设计中,水面垃圾收集船的结构图,装配图,零件图,都有详细的说明。
关键字:水面垃圾自动清理环境保护船舶AbstractIn this paper, the hull structure, power plant, transmission device , garbage storage device for automatic cleaning of the surface of the water waste as well as other parts of the design , calculation, check . In the case of the understanding of the results of the design required to achieve the functional requirements, as well as the actual environmental background to study the design of the structure and function of the water garbage sweeper system .Surface garbage automatic cleaning machine for the water problem of environmental pollution , solid waste clean-up dedicated to small and medium-sized lakes and rivers waters , such as plastic bags , beverage bottles, leaves and branches , as well as other easy to clean surface garbage .Surface garbage clean-up of mechanization and automation, the entire salvage process without human participation, very good security , efficiency is about artificial salvage hundreds of times , the greater the surface of the water , the storms greater the effect is more significant .The design in addition to the power plant and other ship class ,the transmission device and garbage storage device has a unique design . Form of the sprockets and the chain transmission is driven by a transmission belt, and the hull in front of the two rotating blades are designed so that the garbage collection on the water more efficiently .In addition, garbage storage device uses three replaceable storage tank , the bottom is designed to porous surface garbage collection more convenient, enforceability has been strengthened .In this paper,the design,a block diagram of the water garbage collection vessel , assembly drawings, parts diagram , there is a detailed description . Keywords:The water waste;Automatic cleanup;environmental protection ship目录摘要 (I)Abstract (II)目录 (III)第一章绪论 (1)1.1毕业设计的选题背景 (1)1.2毕业设计研究现状及特点分析 (2)1.3本课题的研究目的及意义 (3)第二章船体的设计 (4)2.1船体的结构设计 (4)2.2船体材料的选择 (8)2.2.1船体材料的介绍 (8)2.2.2船体材料的确定及相关参数 (8)2.3.船体重要尺寸 (8)2.4船的排水量和吃水深度的计算 (9)2.4.1船体质量的计算 (9)2.4.2重排水量的计算 (9)2.4.3最大吃水深度的计算 (10)第三章动力装置的设计 (10)3.1蓄电池的选择 (10)3.2电动机的选择 (11)3.3船舶推进器的选择 (15)第四章传输装置的设计 (17)4.1传输装置的总体设计 (17)4.2链传动的设计 (18)4.2.1链条的选择和计算 (18)4.2.2链轮相关尺寸的计算 (20)4.3轴的设计 (21)4.3旋转筒的设计 (23)第五章垃圾存储装置的设计 (26)第六章其它零部件的设计 (28)6.1滚动轴承的选择 (28)6.2轴承座的选择 (28)6.3键等相关标准件的选择 (29)总结 (31)致谢 (32)参考文献 (33)附录水面垃圾自动清扫机3D图 (34)第一章绪论1.1毕业设计的选题背景随着社会经济的飞速发展,环境问题日益突出,水环境的污染问题也越来越受到人们的关注。
水面漂浮垃圾清理装置原理
水面漂浮垃圾清理装置原理
水面漂浮垃圾清理装置的原理是通过收集和清理漂浮在水面上的垃圾
和污染物,提高水质和保护生态环境。
其工作原理主要包括以下几个步骤:
1.垃圾捕捞:水面漂浮垃圾清理装置通过机械或人工捕捞,将漂浮在
水面的垃圾和污染物集中到一起。
2.垃圾分离:收集到的垃圾需要分离,将可回收物品和厨余垃圾等分
离开处理,以便进行再次利用。
3.垃圾压缩:收集到的垃圾需要进行压缩处理,以减少体积和运输成本。
4.垃圾运输:压缩后的垃圾需要运输到相应的垃圾处理设施进行处理,如焚烧、填埋等。
5.设备维护:水面漂浮垃圾清理装置需要进行维护,包括设备的清洁
和维修等,以确保其长期稳定运作。
水面漂浮垃圾清理装置通过以上步骤,可以有效的清理漂浮在水面上
的垃圾和污染物,保障水质安全和生态环境的健康发展。
政府水面垃圾清理措施
政府水面垃圾清理措施概述水面垃圾污染是现代城市面临的一项严峻问题。
随着城市人口的增加和经济的发展,水面垃圾数量不断增加,对水质和生态环境造成了严重影响。
为了解决这一问题,政府采取了一系列的水面垃圾清理措施,以保护城市的水资源和环境。
1. 垃圾捡拾船垃圾捡拾船是政府采取的一项重要措施。
这种船只配备了专门的垃圾收集装置,能够在水面上捡拾漂浮的垃圾。
船只通过操控装置,将垃圾收集到船上的储存室,并及时进行处理和回收。
这项技术在许多城市得到了广泛应用,有效减少了水面垃圾的数量。
2. 垃圾网捞器垃圾网捞器是一种借助于网状机构捞取水面垃圾的设备。
它们通常被安装在河流和湖泊等水体的出水口处,能够阻止垃圾流入下游的水体,同时捞取垃圾。
这些网捞器在收集垃圾的同时,也可以防止大块垃圾对水流的阻塞和污染,保护水质和生态环境。
3. 垃圾分类推广垃圾分类是一项重要的工作,可以有效减少水面垃圾的数量。
政府通过宣传、教育和制定相关法律法规来推广垃圾分类工作。
人们被教育和鼓励将垃圾分类投放到不同的回收桶中,以便能够进行有效的回收和处理。
这项措施既能减少水面垃圾的产生,也能提高资源回收的效率。
4. 水域监测与罚款为了加强对水质的监测和管理,政府建立了一系列水域监测站。
这些监测站可以实时监测水体的质量和垃圾浓度,以及各种污染物的排放情况。
政府还对违法排放垃圾的企业和个人进行罚款,以强化法律的执行力度,减少水面垃圾的排放。
5. 国际合作与技术支持政府在水面垃圾清理工作中也积极推进国际合作与技术支持。
通过与国际组织和其他国家的合作,政府获取了先进的技术和经验,可以更加高效地清理水面垃圾。
同时,政府也积极参与国际会议和研讨会,分享本国的经验和成果。
结论政府水面垃圾清理措施的实施对于保护城市的水资源和环境具有重要意义。
通过采取垃圾捡拾船、垃圾网捞器、垃圾分类推广等措施,政府有效减少了水面垃圾的数量。
同时,水域监测与罚款以及国际合作与技术支持也为水面垃圾清理提供了有力的保障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
说明书摘要本发明公开了一种水面漂浮垃圾清理机,机架(15)固定于浮动平台(14)上,浮动平台(14)穿插于四根立柱(3)中,从而限制其水平移动和转动,清理机随水位高低自动升沉调整到最佳工作位置;水流驱动水轮运转,为清理机提供动力,处于缓流或静水区,驱动补偿电机(6)作为动力源;传动轴(2)上的凸轮(5)通过连杆机构(19)驱动集物耙(13)在水平面摆动,驱使垃圾向打捞口汇集,网状抄板7将其打捞至网状输送板(10)上,通过输送系统将其送至垃圾箱(4)。
本发明的水面漂浮垃圾清理机具有自适应能力强,节约能源,工作效率高,无需人工维护,使用范围广等特点,可广泛用于清理江、河及湖泊的水面漂浮垃圾。
摘要附图权利要求书1、一种水面漂浮垃圾清理机,其特征在于:浮动平台(14)活动套穿插于至少二根立柱(3)中,机架(15)固定于所述的浮动平台(14)上,在所述的浮动平台(14)上设有垃圾箱(4),所述的浮动平台(14)上设有打捞输送系统,所述的打捞输送系统一端与所述的垃圾箱(4)对接,另一端伸到水面输送垃圾,所述的浮动平台(14)上设有与所述的打捞输送系统传动连接的驱动系统。
2、根据权利要求1所述的水面漂浮垃圾清理机,其特征在于:集物耙(13)铰接于所述的机架(15)上,所述的集物耙(13)由所述的驱动系统驱动在水平面摆动且所述的集物耙(13)对应将垃圾摆动到所述的打捞输送系统的入口端。
3、根据权利要求1或2所述的水面漂浮垃圾清理机,其特征在于:所述的打捞输送系统是在输送架(18)上设有连接轴(9)和链轮(11),所述的链轮(11)与所述的驱动系统传动连接,在所述的链轮(11)上设有两根平行同步输送链(12),所述的平行同步输送链(12)每隔一定链节数用一根长轴(8)连接于两根所述的平行同步输送链(12)之间,在所述的平行同步输送链(12)上相间设有网状输送板(10)和网状抄板(7),所述的网状输送板(10)的一侧通过两个一字型铰链杆(17)铰接于所述的平行同步输送链(12)的长轴(8)上,可绕其自由转动,另一侧搭接于下一个所述的平行同步输送链(12)的长轴(8)上;所述的网状抄板(7)由两个成60°角度的V型铰链架(16)铰接于所述的平行同步输送链(12)的长轴(8)上,所述的V型铰链架(16)一侧搭接于所述的平行同步输送链(12)的下一个长轴(8)上,另一侧支撑所述的网状抄板(7)使其与传送面成60°角度。
4、根据权利要求1或2所述的水面漂浮垃圾清理机,其特征在于:所述的驱动系统是水轮(1)和驱动补偿电机(6)分别通过离合器连接于传动轴(2)的两端,所述的传动轴(2)与所述的打捞输送系统和所述的集物耙(13)传动连接。
5、根据权利要求4所述的水面漂浮垃圾清理机,其特征在于:凸轮5集成于所述的传动轴(2)上,所述的集物耙(13)通过连杆机构(19)与所述的凸轮(5)传动连接。
说明书水面漂浮垃圾清理机技术领域本发明涉及一种适应江、河、航道及湖泊水面漂浮垃圾清理的环卫机械,特别是具有一定水流速度的水面漂浮垃圾的清理机。
背景技术随着人们生活水平的不断提高,制造的生活垃圾越来越多,由于环保意识的缺乏,很大一部分生活垃圾被弃入江、河、湖泊之中,致使江、河、湖泊的水面上经常漂浮大量垃圾,部分区域污染特别严重,如航运河道、发电站前池,如果不及时清理,将会影响航道运行、发电机组正常运转。
另一方面,由于生活污水和工业废水大量排放,河水严重营养富集,导致水面出现了大量的浮游藻类,如不及时清理,将严重打破区域生态平衡。
为了清理这些水面漂浮垃圾,环保部门每年都要投入大量的人力、财力和物力,定时进行人工打捞,现有的人工打捞工具均为捞勺、捞网或简单小型的打捞设备,致使人工打捞劳动强度大,作业效率低,清理效果也不理想。
发明内容本发明所要解决的技术问题是提供一种具有自适应功能,节约能源,自动化程度高,工作效率高,不需要人工维护的水面漂浮垃圾清理机。
为了解决上述技术问题,本发明提供的水面漂浮垃圾清理机,浮动平台活动套穿插于至少二根立柱中,机架固定于所述的浮动平台上,在所述的浮动平台上设有垃圾箱,所述的浮动平台上设有打捞输送系统,所述的打捞输送系统一端与所述的垃圾箱对接,另一端伸到水面输送垃圾,所述的浮动平台上设有与所述的打捞输送系统传动连接的驱动系统,集物耙铰接于所述的机架上,所述的集物耙由所述的驱动系统驱动在水平面摆动且所述的集物耙对应将垃圾摆动到所述的打捞输送系统的入口端。
所述的打捞输送系统是在输送架上设有连接轴和链轮,所述的链轮与所述的驱动系统传动连接,在所述的链轮上设有两根平行同步输送链,所述的平行同步输送链每隔一定链节数用一根长轴连接于两根所述的平行同步输送链之间,在所述的平行同步输送链上相间设有网状输送板和网状抄板,所述的网状输送板的一侧通过两个一字型铰链杆铰接于所述的平行同步输送链的长轴上,可绕其自由转动,另一侧搭接于下一个所述的平行同步输送链的长轴上;所述的网状抄板由两个成60°角度的V型铰链架铰接于所述的平行同步输送链的长轴上,所述的V型铰链架一侧搭接于所述的平行同步输送链的下一个长轴上,另一侧支撑所述的网状抄板使其与传送面成60°角度。
所述的驱动系统是水轮和驱动补偿电机分别通过离合器连接于传动轴的两端,所述的传动轴与所述的打捞输送系统和所述的集物耙传动连接。
凸轮集成于所述的传动轴上,所述的集物耙通过连杆机构与所述的凸轮传动连接。
采用上述技术方案的水面漂浮垃圾清理机,浮动平台、机架和立柱构成升沉补偿系统;水轮、传动轴、驱动补偿电机、离合器组成驱动系统;集物耙、链轮、平行同步输送链、连接轴组成垃圾汇集打捞输送系统。
如上所述的升沉补偿系统为清理机固定于浮动平台上,浮动平台通过四根立柱限制其在水平面的移动和转动,只保证其在竖直方向上可以灵活移动。
安装清理机时设定好立柱的位置,保证清理机打捞部分正对漂浮物来流方向,然后将浮动平台穿入立柱中。
当水位发生变化时,浮动平台沿着立柱上下浮动,自动调节到清理机的最佳清理位置。
如上所述的驱动系统由水轮和驱动补偿电机通过离合器分别连接于传动轴的两端。
在水文旺季,水流驱动水轮运转,传动轴将能量输送给打捞系统,为其提供动力,而连接驱动补偿电机和水轮的离合器处于分开状态。
当清理机应用于缓流或静水区时,驱动补偿电机通过离合器驱传动轴运转,此时驱动补偿电机为系统提供主要动力。
如上所述的垃圾汇集打捞输送系统由平行同步输送链、集物耙、2对链轮、链接轴、凸轮构成,集物耙铰接于机架的左边,由装在传动轴上的凸轮通过连杆机构驱动其在水平面摆动,驱使上游漂浮下来的垃圾至清理机的打捞口;打捞输送系统主要由平行同步输送链、网状输送板和网状抄板组成,平行同步输送链由两条普通滚子链改装而成,每隔一定链节数用一根长轴代替原有销轴连接于两链条之间,从而保证其在传送中平行且同步;网状输送板的一侧通过两个一字型铰链杆铰接于平行同步输送链的长轴上,可绕其自由转动,另一侧搭接于下一长轴上;网状抄板由两个成60°角度的V型铰链架铰接于长轴上,V型铰链架一侧搭接于下一长轴上,另一侧支撑网状抄板使其与传送面成60°角度,且由于垃圾重力作用使V型铰链架产生一定的弹性形变,当网状抄板传送至垃圾箱时,由于V型铰链架形变恢复将垃圾弹入垃圾箱中。
该机器工作时,清理机输送系统的前端浸入水中至链轮全部淹没,随水流漂浮而下的垃圾被通过集物耙的摆动将其汇聚到打捞口,网状抄板随着平行同步输送链绕着链轮转动,而此时下一长轴支撑起V型铰链架的自由端,随着平行同步链继续运转,网状抄板相对输送面完成从负角度到正角度的翻转,因此漂浮垃圾被网状抄板打捞至网状输送板上。
当垃圾输送到垃圾箱位置时,由于网状抄板转过一定角度,垃圾对其正压力减少,V型铰链架弹性恢复,将垃圾弹入其后的垃圾箱内,此时打捞过程完成。
水面垃圾清理机具有如下特点:1. 浮动平台可随水位沿着立柱上下浮动,因此只要设定好初始位置,清理机就能在不同水位工况下保持高效的工作状态。
2. 清理机的驱动动力可由水轮或驱动补给电机提供,具有环保节能和适用范围广的特点。
3. 打捞输送机构具有着自动高效地打捞垃圾的功能,集物耙具有一定角度的摆动功能,大大提高了清理机的打捞范围;4.结构简单,成本低廉,使用方便,维护简单,适用范围广。
附图说明图1为水面漂浮垃圾清理机结构示意图;图2为输送系统示意图;图3为同步输送链结构图。
具体实施方式下面结合附图和具体实施方式对本发明作进一步说明。
参见图1、图2和图3,浮动平台14活动套穿插于四根立柱3中,机架15固定于浮动平台14上,在浮动平台14上设有垃圾箱4,浮动平台14上设有输送架18,在输送架18上设有连接轴9和链轮11,在链轮11上设有两根平行同步输送链12,平行同步输送链12每隔一定链节数用一根长轴8连接于两根平行同步输送链12之间,在平行同步输送链12上相间设有网状输送板10和网状抄板7,网状输送板10的一侧通过两个一字型铰链杆17铰接于平行同步输送链12的长轴8上,可绕其自由转动,另一侧搭接于下一个平行同步输送链12的长轴8上;网状抄板7由两个成60°角度的V型铰链架16铰接于平行同步输送链12的长轴8上, V型铰链架16一侧搭接于平行同步输送链12的下一个长轴8上,另一侧支撑网状抄板7使其与传送面成60°角度。
输送架18一端与垃圾箱4对接,另一端伸到水面输送垃圾,浮动平台14上设有传动轴2,水轮1和驱动补偿电机6分别通过离合器连接于传动轴2的两端,传动轴2与链轮11传动连接,集物耙13铰接于机架15上,凸轮5集成于传动轴2上,集物耙13通过连杆机构19与凸轮5传动连接,集物耙13由连杆机构19驱动在水平面摆动将垃圾摆动到输送架18的入口端。
本第一实施例应用于水流流速介于0.8~6m/s的江、河、航道中。
清理机固定于浮动平台14上,浮动平台14穿插于四根立柱3中,限制清理机在水平面的平移和转动,保证清理机随水位高低自由升沉并使打捞口正对漂浮物流向。
水流驱动水轮1转动,通过传动轴2带动平行同步输送链12运转,为清理机的输送系统提供动力。
上游漂浮垃圾顺流而下时,集成于传动轴2上的凸轮5通过连杆机构19驱动集物耙13在水平面内做一定角度的摆动,驱使垃圾汇集到清理机的打捞口。
链轮11带动平行同步输送链12转动,网状抄板7跟随平行同步输送链12,而此时下一长轴8支撑起V型铰链架16的自由端,随着平行同步输送链12继续运转,网状抄板7相对输送面完成从负角度到正角度的翻转,漂浮垃圾被网状抄板7打捞至网状输送板10上。
当垃圾输送到垃圾箱位置时,由于网状抄板7转过一定角度,垃圾对其正压力减少,V型铰链架16弹性恢复,将垃圾弹入其后的垃圾箱4内,此时打捞过程完成。