基于MATLAB的图像阈值分割技术
基于MATLAB的图像阈值分割算法的研究
所谓阈值分割方法就是确定某个阈值 Th ,根据图像中每个像素的灰度值大小或小于该阈值 Th , 来进行图像分割。阈值方法的数学模型如下: 设原图像为 f ( x, y ) ,经过分割处理后的图像为 g ( x, y ) , g ( x, y ) 为二值图像,则有:
1, g ( x, y ) 0,
数字图像的像素分布在一定程度上可以反映图像内容的特征,利用像素值的分布特征进行图像 分类成了目前对图像进行分类的常用手段。图像分类的性能主要取决于图像的特征提取,数字图像 的特征提取主要从颜色、纹理、形状等几个方面提取图像的特征。 1.2.4. 分水岭算法
分水岭算法是一种借鉴了形态学的分割算法,在该方法中,将一副图像看成是一个拓扑地图其 中灰度值 f ( x, y ) 对应的高度图。高灰度值对应着山峰,低灰度对应着山谷。水总是朝着低的地方流 动,直到某一局部低洼处才停下来,这个低洼处被称为吸水盆地。最终所有的水会分聚在不同的吸 水盆地,吸水盆地之间的山性是相等的。将这种想法用于图像分割,就是要在灰度图像中找出不同的吸水盆地和分水岭,由 这些不同的吸水盆地和分水岭组成的区域即为要分割的目标。 MATLAB 图像处理工具箱中的 watershed 函数可以用于显示分水岭算法。
1 2 3
给定一个初始阈值 Th ,将图像分为 C1 和 C 2 两类 计算两类的灰度均值 1 和 2 计算两类的相对距离值 S
S
4
( 2 Th) (Th 1 ) ( 2 1 ) 2
图 2.1 国际标准测试图片
图 2.3 阈值分割后的图片
第 3页共 12页
图 2.2 图 2.1 的灰度直方图
显然,灰度直方图的峰谷阈值方法是一种有效且非常简单的阈值方法,但是该方法有一个局限 性,就是要求图像的灰度直方图必须具有双峰型。 2.2. 自动阈值选择算法
Matlab中的图像分割与边缘检测方法
Matlab中的图像分割与边缘检测方法引言图像处理是一门研究如何对数字图像进行处理、分析、改进和理解的学科。
图像分割与边缘检测在图像处理中占据着重要的地位。
图像分割是将图像划分为多个具有语义意义的区域或对象的过程,而边缘检测则是找到图像中不连续的区域边界。
Matlab作为一种强大的软件工具,提供了丰富的图像处理函数和工具箱,本文将探讨在Matlab中应用的图像分割与边缘检测方法。
一、图像分割方法1. 基于阈值的分割基于阈值的分割是一种简单但有效的方法。
该方法将图像像素的灰度值与预设的阈值进行比较,根据比较结果将像素分配到不同的区域。
在Matlab中,可以使用imbinarize和graythresh函数来实现基于阈值的分割。
2. 区域增长法区域增长法基于像素之间的相似性来进行分割。
该方法从种子像素开始,通过判断邻域像素与种子像素的相似度来不断扩展区域。
在Matlab中,可以使用imsegf和regiongrowing函数来实现区域增长法。
3. 聚类方法聚类方法将图像像素分为多个类别,每个类别代表一个区域。
该方法通常使用聚类算法,比如k-means算法或者模糊c-均值算法。
在Matlab中,可以使用kmeans和fcm函数来实现聚类方法。
4. 模型驱动法模型驱动法基于数学模型来描述图像中的区域。
该方法通过定义一个能够衡量图像中区域特征的能量函数,并通过优化算法来最小化能量函数,从而得到分割结果。
在Matlab中,可以使用activecontour和chanvese函数来实现模型驱动法。
二、边缘检测方法1. Sobel算子Sobel算子是一种经典的边缘检测算子。
其基本思想是通过计算像素与其周围像素之间的差异来检测边缘。
在Matlab中,可以使用imgradient和imgradientxy函数来实现Sobel算子。
2. Canny算子Canny算子是一种广泛使用的边缘检测算子。
它利用高斯平滑、梯度计算、非极大值抑制和双阈值法来检测边缘。
在Matlab中实现图像分割和目标检测的方法
在Matlab中实现图像分割和目标检测的方法图像处理领域是计算机科学中的一个重要研究方向,其中图像分割和目标检测是最核心也是最具挑战性的任务之一。
Matlab是一个强大的数学计算软件,在图像处理领域有着广泛的应用。
本文将介绍在Matlab中实现图像分割和目标检测的方法。
一、图像分割1. 基于阈值的分割方法基于阈值的分割是最简单的图像分割方法之一。
它通过设定一个或多个阈值,将图像中的像素分为不同的类别。
在Matlab中,可以使用imbinarize函数实现二值化分割,也可以使用graythresh函数自动计算阈值。
2. 基于边缘的分割方法基于边缘的分割是一种常用的分割方法,它通过检测图像中的边缘来实现图像的分割。
在Matlab中,可以使用edge函数实现边缘检测,可以选择不同的算法进行边缘检测,如Sobel、Prewitt等。
3. 基于区域的分割方法基于区域的分割方法将图像中的像素划分为不同的区域,每个区域具有相似的属性,如灰度值、纹理等。
在Matlab中,可以使用regiongrowing函数或者watershed函数实现基于区域的分割。
二、目标检测1. 基于颜色特征的目标检测方法基于颜色特征的目标检测方法将目标物体和背景物体通过颜色的差异进行区分。
在Matlab中,可以使用colorthresh函数实现基于颜色特征的目标检测。
该函数可以根据不同颜色空间(如RGB、HSV等)来进行分割,选择合适的颜色阈值可以实现目标的检测。
2. 基于形状特征的目标检测方法基于形状特征的目标检测方法通过分析目标的形状信息来进行检测。
在Matlab 中,可以使用regionprops函数计算图像中的区域属性,如面积、周长、中心点等。
通过对这些属性的分析,可以实现目标的检测。
3. 基于纹理特征的目标检测方法基于纹理特征的目标检测方法通过分析目标和背景的纹理信息来进行检测。
在Matlab中,可以使用texturefilt函数进行纹理特征的提取,可以选择不同的滤波器(如高斯、拉普拉斯等)来提取不同的纹理特征。
使用Matlab进行图像分割的方法研究
使用Matlab进行图像分割的方法研究引言:图像分割技术在计算机视觉领域具有重要的应用价值。
它可以将一幅图像划分成若干个区域,将相似的像素点归为一组,从而提取出感兴趣的目标。
Matlab作为广泛使用的科学计算软件,提供了丰富的图像处理工具包,为图像分割领域的研究提供了许多便利。
本文将通过对Matlab中常用的图像分割方法的研究,探讨如何使用Matlab进行图像分割。
一、基于阈值的图像分割方法1.1 简单阈值法简单阈值法是一种最常用的图像分割方法之一。
它基于图像灰度值的差异,将像素点分成两类:黑色和白色。
具体实现上,我们需先选择合适的阈值,然后将图像中灰度值小于阈值的像素点设为黑色,灰度值大于等于阈值的像素点设为白色。
Matlab提供了丰富的图像处理函数,可以通过一行简洁的代码实现简单阈值法。
1.2 自适应阈值法简单阈值法在图像灰度均匀性较好的情况下效果较好,但在图像灰度不均匀的情况下会出现分割效果不佳的情况。
而自适应阈值法则可以根据图像的局部灰度特性进行分割,从而提高图像分割的准确性。
Matlab中提供了一系列的自适应阈值法函数,比如局部均值法、局部中值法等,可以根据具体的需求选择合适的方法进行图像分割。
二、基于边缘的图像分割方法2.1 Roberts算子Roberts算子是一种经典的图像边缘检测算法,它通过对图像进行微分运算,提取出图像边缘的特征。
在Matlab中,我们可以使用函数"edge"结合Roberts算子进行图像分割,并得到图像的边缘信息。
通过对提取得到的边缘信息进行二值化处理,即可将图像分成物体和背景两部分。
2.2 Canny算子Canny算子是一种常用的边缘检测算法,它通过利用图像中像素点的梯度变化信息来提取出图像的边缘。
在Matlab中,我们可以使用函数"edge"结合Canny算子进行图像分割。
Canny算子具有较好的抗干扰性和边缘连接性,因此在图像分割中使用广泛。
基于MATLAB的图像阈值分割技术

若图像中目标和背景具有不同的灰度集合:目标灰度集合与背景灰度集合,且两个灰度集合可用一个灰度级阈值T进行分割。这样就可以用阈值分割灰度级的方法在图像中分割出目标区域与背景区域,这种方法称为灰度阈值分割方法。
在物体与背景有较强的对比度的图像中,此种方法应用特别有效。比如说物体内部灰度分布均匀一致,背景在另一个灰度级上也分布均匀,这时利用阈值可以将目标与背景分割得很好。如果目标和背景的差别是某些其他特征而不是灰度特征时,那么先将这些特征差别转化为灰度差别,然后再应用阈值分割方法进行处理,这样使用阈值分割技术也可能是有效的
数字图像处理课程论文
基于MATLAB的图像阈值分割技术
摘要:本文主要针对图像阈值分割做一个基于MATLAB的分析。通过双峰法,迭代法以及OUTS法三种算法来实现图像阈值分割,并且就这三种算法做了一定的分析和比较,在加椒盐的图片上同时进行三种实验,做出比较,最终得出实践结论。
关键词:图像分割 MATLAB 阈值分割 算法
引言:图像分割是图像处理与计算机视觉领域低层次视觉中最为基础和重要的领域之一,它是对图像进行视觉分析和模式识别的基本前提.同时它也是一个经典难题,到目前为止既不存在一种通用的图像分割方法,也不存在一种判断是否分割成功的客观标准,图像阈值分割即是其中的一种方法。 阈值分割技术因其实现简单、计算量小、性能较稳定而成为图像分割中最基本和应用最广泛的分割技术,已被应用于很多的领域,在很多图像处理系统中都是必不可少的一个环节。
方法一:双峰法
方法原理:
双峰法是一种简单的阈值分割方法。双峰法先将原图转为灰度图,然后将灰度图转为灰度直方图,灰度直方图就是灰度级的像素数ni与灰度i的二维关
系,它反映了一幅图像上灰度分布的统计特性,在MATLAB中使用函数imhist
如何在Matlab中进行图像分割
如何在Matlab中进行图像分割图像分割是图像处理中十分重要的一项技术,它能够将图像划分为多个具有独立意义的区域,有助于进一步的图像分析和处理。
在Matlab中进行图像分割,我们可以利用许多现成的函数和工具箱,使得整个过程更加高效和便捷。
本文将介绍如何在Matlab中进行图像分割,包括基于阈值的分割方法、基于边缘的分割方法以及基于区域的分割方法。
首先,基于阈值的分割方法是最简单和常用的图像分割方法之一。
它基于图像的亮度或颜色信息,将图像分为不同的区域。
在Matlab中,我们可以使用im2bw 函数将彩色图像转换为二值图像,然后使用graythresh函数或multithresh函数确定适当的阈值。
例如,下面的代码演示了如何使用阈值进行图像分割:```matlabimg = imread('image.jpg');grayImg = rgb2gray(img);threshold = graythresh(grayImg);binaryImg = im2bw(grayImg, threshold);```其次,基于边缘的分割方法是通过检测图像中的边缘信息来实现图像分割。
在Matlab中,我们可以使用一系列边缘检测算法,如Sobel算子、Canny算子等。
这些算法可以提取图像中的边缘信息,并将其转化为二值图像。
下面的代码演示了如何使用Canny算子进行图像分割:```matlabimg = imread('image.jpg');grayImg = rgb2gray(img);edgeImg = edge(grayImg, 'canny');```最后,基于区域的分割方法是将图像分为具有相似纹理、颜色或形状特征的区域。
在Matlab中,我们可以使用基于区域的分割算法,如分水岭算法、区域生长算法等。
这些算法可以通过对图像进行区域合并或区域分裂来实现图像分割。
Matlab技术图像分割与目标检测方法总结

Matlab技术图像分割与目标检测方法总结Matlab技术在图像分割和目标检测领域具有广泛的应用。
图像分割是将图像细分为具有不同特征的区域的过程,而目标检测是在图像中识别并定位特定目标的过程。
本文将综述一些常见的Matlab图像分割和目标检测方法。
一、Matlab图像分割方法1. 基于阈值的图像分割基于阈值的图像分割是最简单和常用的图像分割方法之一。
该方法根据像素的灰度值与预设阈值的关系,将图像分为不同的区域。
Matlab中提供了丰富的函数和工具箱,如graythresh函数和imbinarize函数,可用于阈值化分割。
2. 基于聚类的图像分割基于聚类的图像分割是通过将像素聚类成不同的群集,利用像素的相似性进行分割。
常见的聚类算法包括k-means聚类和fuzzy c-means聚类。
Matlab中的kmeans函数和fcm函数可用于实现这些聚类算法。
3. 基于边缘检测的图像分割边缘是图像中灰度值剧烈变化的地方,通常表示图像中物体的边界。
基于边缘检测的图像分割方法尝试识别图像的边缘,并将图像分割为不同的区域。
Matlab中的edge函数和边缘检测算法,如Sobel算子和Canny算子,可用于实现这一方法。
二、Matlab目标检测方法1. 基于特征提取的目标检测特征提取是目标检测中的重要步骤,通过提取目标在图像中的唯一特征,实现对目标的识别和定位。
常用的特征提取方法包括Gabor滤波器和Haar-like特征。
Matlab提供了一系列的函数和工具箱,如gaborfilt函数和viola-jones检测器,可用于实现这些特征提取方法。
2. 基于机器学习的目标检测机器学习技术可以自动学习目标的特征和模式,并用于目标检测中。
常见的机器学习方法包括支持向量机(SVM)和卷积神经网络(CNN)。
Matlab中的svmtrain函数和深度学习工具箱可用于实现这些机器学习方法。
3. 基于深度学习的目标检测深度学习是目标检测中的热门方法,通过构建深层神经网络模型,实现对目标的高效检测和定位。
Matlab中的图像分割和目标检测技巧

Matlab中的图像分割和目标检测技巧引言Matlab是一种强大的数学建模与编程软件,被广泛应用于图像处理和计算机视觉领域。
本文将探讨在Matlab中实现图像分割和目标检测的技巧,介绍一些常用的算法和方法,并展示其在实际应用中的效果和优势。
一、图像分割技巧图像分割是指将图像分为多个不同的区域或对象的过程。
在Matlab中,可以使用多种方法实现图像分割,其中包括阈值分割、边缘检测和区域生长等技术。
1. 阈值分割阈值分割是最简单和常用的图像分割技术之一。
通过将图像的灰度值与一个或多个阈值进行比较,将像素归类为不同的区域。
Matlab提供了丰富的函数来实现阈值分割,如im2bw和graythresh等。
通过灵活的参数设置,可以实现不同类型的分割效果。
2. 边缘检测边缘检测是图像分割中的重要步骤,用于在图像中找到边界或轮廓。
Matlab提供了多种边缘检测算法,如Sobel、Canny和Laplacian等。
这些算法基于图像的灰度变化来检测边缘,并生成二值图像或边缘图像。
3. 区域生长区域生长是一种基于相似性的图像分割技术,其通过将相邻像素生长为一个区域来实现分割。
在Matlab中,可以使用regiongrowing函数来实现区域生长。
该函数通过设置种子点和相似度阈值,自动将相邻像素合并为一个区域,从而实现图像的分割。
二、目标检测技巧目标检测是图像处理和计算机视觉领域的核心任务之一,其目标是在图像中自动识别和定位感兴趣的目标。
在Matlab中,可以应用各种算法和技术来实现目标检测,包括特征提取、模板匹配和机器学习等方法。
1. 特征提取特征提取是目标检测的重要步骤,用于从图像中提取具有代表性的特征。
在Matlab中,可以使用各种特征提取算法,如HOG、SIFT和SURF等。
这些算法通过计算图像的局部特征或全局特征,将图像转换为特征向量,从而实现目标的判定和分类。
2. 模板匹配模板匹配是一种简单而有效的目标检测技术,它通过在图像中滑动一个模板来寻找可能与目标匹配的位置。
Matlab技术图像分割算法

Matlab技术图像分割算法图像分割是数字图像处理领域中的一个重要任务,其目标是将图像分割成多个具有相似特征的区域或对象。
图像分割在许多应用领域中都有广泛的应用,例如医学图像分析、目标检测与跟踪、图像识别等。
而Matlab是一种功能强大的软件平台,为图像处理和分析提供了丰富的工具和算法。
在本篇文章中,我们将介绍一些Matlab技术中常用的图像分割算法。
一、基于阈值的分割算法基于阈值的分割算法是图像分割中最简单和最常用的方法之一。
该方法以图像的灰度值作为分割的依据,将图像中灰度值落在某个范围内的像素点划分为同一区域。
Matlab提供了一系列用于图像阈值处理的函数,如im2bw和graythresh等。
这些函数可以根据不同的阈值选择方法,自动计算出适合图像分割的阈值。
二、基于区域的分割算法基于区域的分割算法是基于像素相似性的分割方法。
该方法将图像分割为具有相似特征的区域,并通过合并或分割区域来达到目标。
在Matlab中,使用基于区域的分割算法需要先进行预处理,如平滑滤波、边缘检测等。
然后可以使用函数regiongrowing和imsegfmm等进行区域生长和水平线漫延分割。
三、基于边缘的分割算法基于边缘的分割算法是基于图像中边缘信息进行分割的方法。
边缘是图像中像素值发生剧烈变化的地方,通常与物体的边界相对应。
Matlab中的边缘检测函数如edge和gradient等,可以帮助我们找到图像的边缘信息。
然后可以使用函数imfill和bwmorph等进行边缘填充和边缘处理,进而实现图像的边缘分割。
四、基于聚类的分割算法基于聚类的分割算法是将图像像素点按照相似性进行分组的方法。
聚类算法能够将图像中灰度或颜色相似的像素点聚集在一起,形成不同的分割区域。
在Matlab中,使用k-means算法进行聚类分割是一种常用的方法。
通过调用函数kmeans,可以根据像素的灰度或颜色特征将图像分成指定数量的聚类,实现图像的分割。
在Matlab中实现医学图像分割和医学图像配准的方法

在Matlab中实现医学图像分割和医学图像配准的方法医学图像处理在现代医学中起着重要的作用,它可以帮助医生更好地了解人体的结构和病变情况。
其中,医学图像分割和医学图像配准是两个常用的图像处理任务。
本文将介绍如何使用Matlab实现这两个任务的方法。
一、医学图像分割医学图像分割是将医学图像中感兴趣的区域从背景中分离出来的过程。
这对于病灶的检测和定位非常重要。
在Matlab中,有多种方法可以实现医学图像分割,如基于阈值的分割、基于区域的分割和基于边缘的分割等。
1. 基于阈值的分割基于阈值的分割是医学图像分割中最简单的方法之一。
它将图像中的像素根据亮度和颜色等特征进行分类。
在Matlab中,可以使用imbinarize函数实现阈值分割。
通过调整阈值的大小,可以得到不同的分割结果。
然而,这种方法对于复杂的图像可能效果不佳。
2. 基于区域的分割基于区域的分割是将图像中的像素分成若干区域,并根据相似性准则将它们合并或进一步细分的方法。
在Matlab中,可以使用regionprops函数计算各个区域的特征,并根据这些特征对区域进行分类和合并。
这种方法通常适用于异质性较小的图像。
3. 基于边缘的分割基于边缘的分割是通过检测图像中的边缘信息来实现分割的方法。
在Matlab中,可以使用边缘检测算法(如Canny算子)来提取图像中的边缘信息,并通过边缘连接或边缘跟踪来实现分割。
这种方法对于图像中有明显边缘的情况效果较好。
二、医学图像配准医学图像配准是将多个医学图像的位置和方向相对一致的过程。
它在医学影像的比较、融合和后续处理等方面具有重要的应用。
在Matlab中,有多种方法可以实现医学图像配准,如基于特征的配准、基于互信息的配准和基于形变场的配准等。
1. 基于特征的配准基于特征的配准是通过提取图像中的一些特征点或特征区域,并通过计算它们之间的相似性来实现配准的方法。
在Matlab中,可以使用SURF算法或SIFT算法来提取图像的特征,并通过RANSAC算法等方法来计算配准的变换矩阵。
利用Matlab进行图像分割的常用方法与应用案例
利用Matlab进行图像分割的常用方法与应用案例引言:图像分割是图像处理领域的一项重要技术,它将图像分割成具有相似特征的区域或像素。
图像分割在许多应用中起着关键作用,如医学图像分析、计算机视觉和机器人视觉等领域。
本文将介绍Matlab中常用的图像分割方法和应用案例。
一、基于阈值的图像分割方法基于阈值的图像分割方法是最简单和最常用的一种方法。
它根据像素的灰度值与预先设定的阈值进行比较,将图像分为前景和背景两个部分。
Matlab中提供了丰富的函数和工具箱来实现基于阈值的图像分割。
例如,可以使用im2bw函数将灰度图像转换为二值图像,代码如下:```matlabimage = imread('image.jpg');gray_image = rgb2gray(image);threshold = graythresh(gray_image);bw_image = im2bw(gray_image, threshold);imshow(bw_image);```二、基于边缘检测的图像分割方法边缘检测是图像分割中常用的一种方法,它基于图像中不同区域之间的边界。
常用的边缘检测算法有Sobel、Prewitt和Canny等。
在Matlab中,可以使用edge函数实现边缘检测,代码如下:```matlabimage = imread('image.jpg');gray_image = rgb2gray(image);edge_image = edge(gray_image, 'sobel');imshow(edge_image);```三、基于聚类分析的图像分割方法聚类分析是图像分割中一种常见的方法,它将图像中的像素分成不同的群集,每个群集代表一个区域或对象。
常用的聚类算法有K-means和Mean-shift等。
在Matlab中,可以使用kmeans函数实现K-means聚类,代码如下:```matlabimage = imread('image.jpg');feature_vector = reshape(image, [], 3);[cluster_index, cluster_center] = kmeans(double(feature_vector), 2);segmented_image = reshape(cluster_index, size(image, 1), size(image, 2));imshow(segmented_image);```四、图像分割的应用案例1. 医学图像分割医学图像分割在临床诊断和研究中具有重要意义。
Matlab中的图像分割技术研究
Matlab中的图像分割技术研究引言在图像处理中,图像分割是一个重要且挑战性的任务。
图像分割的目标是将图像划分为不同的区域或对象,以便进一步分析和处理。
在过去的几十年里,许多图像分割算法和技术已经被提出和研究,其中Matlab作为一个强大的工具被广泛应用于图像分割技术的研究和实践中。
本文将介绍一些在Matlab中常用的图像分割技术,并探讨其应用和优缺点。
一、基于阈值的图像分割算法基于阈值的图像分割算法是最简单且常用的一种方法。
它基于像素的灰度值,将图像中的像素分为不同的区域。
在Matlab中,我们可以使用imbinarize函数以及一些自适应阈值算法,如Otsu方法和基于统计学习的算法来实现基于阈值的图像分割。
这些算法简单易懂,并且可以在处理一些简单的图像分割问题时取得不错的效果。
然而,基于阈值的算法在处理复杂图像时会表现出一定的局限性,因为它们难以找到一个全局的合适阈值来准确分割图像。
二、基于边缘检测的图像分割算法基于边缘检测的图像分割算法是一种常用的非阈值算法。
它通过检测图像中的边缘来实现分割。
Matlab中提供了许多边缘检测算子,如Sobel、Canny等。
这些算子可以用于检测图像中的边缘,并进一步分割图像。
边缘检测算法对于目标有明显边缘的图像分割非常有效,但对于图像中的噪声和纹理较多的情况下,结果可能不够理想。
三、基于区域生长的图像分割算法基于区域生长的图像分割算法是一种基于相似性的分割方法。
它从一组像素种子开始,然后将相邻的像素加入到种子区域中,直到满足一定的相似性准则。
Matlab中提供了regiongrowing函数用于实现区域生长算法。
区域生长算法对于图像中区域明显且相似性较高的分割效果较好,但对于具有复杂纹理和边缘的图像,可能出现分割不准确的情况。
四、基于聚类分析的图像分割算法基于聚类分析的图像分割算法是一种基于像素间相似性度量的分割方法。
它将图像中的像素聚类为不同的组,使得组内像素具有较高的相似性,而组间像素具有较低的相似性。
如何利用Matlab技术进行图像分割
如何利用Matlab技术进行图像分割图像分割是计算机视觉领域中的重要任务之一,它可以将一幅图像划分为多个子区域或对象,为图像分析、目标检测和识别等任务提供基础。
在现代科技的发展下,Matlab技术的出现为图像分割提供了强大的工具和算法支持。
本文将介绍如何利用Matlab技术进行图像分割。
1. 图像分割概述图像分割是将图像的像素集合划分为不同的区域或对象的过程。
其目标是根据图像的像素特征和空间关系对图像进行有意义的划分。
常用的图像分割方法包括阈值分割、边缘检测、区域增长和聚类分析等。
2. 阈值分割阈值分割是一种简单且常用的图像分割方法。
其基本思想是将图像的像素根据其灰度值与预定阈值的关系进行划分。
在Matlab中,可以利用im2bw函数将图像转换为二值图像,然后通过设定合适的阈值来实现分割。
3. 边缘检测边缘检测是图像分割中常用的一种方法。
它能够找到图像中不同区域之间的边界,并通过这些边界将图像划分为多个子区域。
在Matlab中,可以通过利用一些经典的边缘检测算子如Sobel、Canny和Laplacian等来实现边缘检测,然后通过二值化和形态学算法来完成图像分割。
4. 区域增长区域增长是一种基于像素相似性的图像分割算法。
它从一组种子点开始,根据像素的相似性逐渐扩展区域,直到达到分割的目标。
在Matlab中,可以利用regiongrowing函数来实现区域增长,通过设定合适的相似性度量指标和种子点策略,可以得到较好的分割效果。
5. 聚类分析聚类分析是一种将图像的像素根据其特征进行分组的方法。
聚类分析常用于无监督学习场景下的图像分割。
在Matlab中,可以利用k-means聚类算法来实现图像分割。
通过设定聚类数目和合适的特征向量,可以将图像进行有效的分割。
除了以上介绍的几种基本的方法外,还有一些其他的高级图像分割算法可以利用Matlab技术实现,如水平集方法、图割算法和标注点算法等。
这些算法在复杂场景下具有较好的效果和鲁棒性。
数字图像灰度阈值的图像分割技术matlab要点
数字图像灰度阈值的图像分割技术matlab要点数字图像分割是数字图像处理的重要步骤。
数字图像灰度阈值的图像分割技术是一种简单且常用的方法。
这篇文档将介绍数字图像灰度阈值的图像分割技术在matlab中的要点。
简介数字图像灰度阈值的图像分割技术是一种基于灰度值的二值化处理方法。
该方法根据一定的阈值将灰度图像分成两个部分:背景和目标。
这种方法广泛应用于自动文本识别,医学图像分析,化学成像等领域。
在matlab中,我们可以使用简单的代码来实现数字图像灰度阈值的图像分割技术。
方法在matlab中进行数字图像灰度阈值的图像分割技术,可以使用以下步骤:1.首先,加载图像并将其转换为灰度图像。
img = imread('image.jpg');gray_img = rgb2gray(img);2.选择合适的阈值进行图像分割。
阈值的选择通常基于试验和误差,并且可以使用histogram函数计算图像的直方图。
threshold = 100;binary_img = gray_img > threshold;上述代码中,我们选择阈值为100,并将灰度图像转换为二值图像。
3.显示分割后的图像。
figure;subplot(1,2,1), imshow(gray_img), title('原图像');subplot(1,2,2), imshow(binary_img), title('二值图像');上述代码中,我们使用subplot函数将原图像和二值图像分别显示在同一幅图像中。
数字图像灰度阈值的图像分割技术是一种简单有效的图像处理方法。
在matlab 中,我们可以使用灰度图像的直方图来选择合适的阈值,并将图像分割成目标和背景。
这种方法广泛应用于各种领域,特别是进行文本识别和模式识别等任务。
为了进一步了解和提高数字图像分割技术的表现,我们需要深入学习各种先进的算法和技术。
基于MATLAB的图像分割技术
利用阀值法对图像进行分割:>> f=imread('peppers.png');>> f=rgb2gray(f);>> f=im2double(f);>> t=0.5*(min(f(:))+max(f(:)));>> done=false;>> while ~doneg=f>=t;tn=0.5*(mean(f(g))+mean(f(~g)));done=abs(t-tn)<0.1;t=tn;end;>> display('Threshold(t)-Iterative'); Threshold(t)-Iterative>> tt =0.4691>> r=im2bw(f,t);>> subplot(2,2,1);imshow(f);>> subplot(2,2,2);imshow(r);>> xlabel('迭代法全局阀值分割');>> th=graythresh(f);>> thth =0.3961>> s=im2bw(f,th);>> subplot(2,2,3);imshow(s);>> xlabel('全局阀值Otsu分割');>> se=strel('disk',10);>> ft=imtophat(f,se);>> thr=graythresh(ft);>> thrthr =0.1098>> lt=im2bw(ft,thr);>> subplot(2,2,4);imshow(lt);>> xlabel('局部阀值分割');用迭代法对图像进行分割:>> i=imread('eight.tif');>> zmax=max(max(i));>> zmin=min(min(i));>> tk=(zmax+zmin)/2;>> bcal=1;>> isize=size(i);>> while (bcal)ifg=0;ibg=0;fg=0;bg=0;for j=1:isize(1)for k=1:isize(2)tmp=i(j,k);if(tmp>=tk)ifg=ifg+1;fg=fg+double(tmp);elseibg=ibg+1;bg=bg+double(tmp);end;end;end;zo=fg/ifg;zb=bg/ibg;tktmp=uint8((zo+zb)/2);if(tktmp==tk)bcal=0;elsetk=tktmp;end;end;>> disp(strcat('迭代后阀值',num2str(tk))); 迭代后阀值165>> newi=im2bw(i,double(tk)/255);>> subplot(1,2,1);imshow(i);>> subplot(1,2,2);imshow(newi);>> xlabel('迭代法');用Otsu法进行阀值选择:>> i=imread('coins.png');>> subplot(1,2,1);imshow(i);>> bw=im2bw(i,graythresh(getimage)); >> subplot(1,2,2);imshow(bw);使用分水岭算法对图像进行分割:>> c1=-10;>> c2=-c1;>> dist=sqrt(2*(2*c1)^2);>> rad=dist/2*1.4;>> li=[floor(c1-1.2*rad) ceil(c2+1.2*rad)];>> [x,y]=meshgrid(li(1):li(2));>> bw1=sqrt((x-c1).^2+(y-c1).^2)<=rad;>> bw2=sqrt((x-c2).^2+(y-c2).^2)<=rad;>> bw=bw1|bw2;>> subplot(1,3,1);imshow(bw);>> d=bwdist(~bw);>> subplot(1,3,2);imshow(d,[]);>> d=-d;>> d(~bw)=-Inf;>> l=watershed(d);>> rgb=label2rgb(l,'jet',[.5 .5 .5]);>> subplot(1,3,3);imshow(rgb);使用分水岭算法:>> c1=-10;>> c2=-c1;>> dist=sqrt(3*(2*c1)^2);>> rad=dist/2*1.4;>> li=[floor(c1-1.2*rad) ceil(c2+1.2*rad)];>> [x,y,z]=meshgrid(li(1):li(2));>> bw1=sqrt((x-c1).^2+(y-c1).^2+(z-c1).^2)<=rad; >> bw2=sqrt((x-c2).^2+(y-c2).^2+(z-c2).^2)<=rad; >> bw=bw1|bw2;>> figure;isosurface(x,y,z,bw,0.5);axis equal;>> set(gcf,'color','w');>> xlim(li);ylim(li);zlim(li);>> view(3);camlight;lighting gouraud;>> d=bwdist(~bw);>> figure;isosurface(x,y,z,d,rad/2);axis equal;>> set(gcf,'color','w');>> xlim(li);ylim(li);zlim(li);>> view(3);camlight;lighting gouraud;>> d=-d;>> d(~bw)=-Inf;>> l=watershed(d);>> figure;>> isosurface(x,y,z,l==2,0.5);>> isosurface(x,y,z,l==3,0.5);>> axis equal;>> set(gcf,'color','w');>> xlim(li);ylim(li);zlim(li);>> view(3);camlight;lighting gouraud;改进的Watershed算法分割图像:>> i=imread('cameraman.tif'); >> subplot(2,3,1);imshow(i);>> i=double(i);>> hv=fspecial('prewitt');>> hh=hv.';>> gv=abs(imfilter(i,hv,'replicate')); >> gh=abs(imfilter(i,hh,'replicate'));>> g=sqrt(gv.^2+gh.^2);>> subplot(2,3,2);df=bwdist(i); >> imshow(uint8(df*8));>> l=watershed(df);>> em=l==0;>> subplot(2,3,3);imshow(em); >> im=imextendedmax(i,20);>> subplot(2,3,4);imshow(im);>> g2=imimposemin(g,im|em); >> subplot(2,3,5);imshow(g2);>> l2=watershed(g2);>> wr2=l2==0;>> i(wr2)=255;>> subplot(2,3,6);imshow(uint8(i));使用区域生长法对图像进行分割:>> i=imread('peppers.png'); >> i=rgb2gray(i);>> i1=double(i);>> s=255;>> t=55;>> if numel(s)==1si=i1==s;s1=s;elsesi=bwnorph(s,'shrink',Inf);j=find(si);s1=i1(j);end;>> ti=false(size(i1));>> for k=1:length(s1)sv=s1(k);s=abs(i1-sv)<=t;ti=ti|s;end;>> [g,nr]=bwlabel(imreconstruct(si,ti));>> subplot(1,2,1);imshow(i);>> subplot(1,2,2);imshow(g);>> nrnr =2对给定图像进行四叉树分解:>> i=imread('liftingbody.png');>> s=qtdecomp(i,.27);>> blocks=repmat(uint8(0),size(s));>> for dim=[512 256 128 64 32 16 8 4 2];numblocks=length(find(s==dim));if(numblocks>0)values=repmat(uint8(1),[dim dim numblocks]);values(2:dim,2:dim,:)=0;blocks=qtsetblk(blocks,s,dim,values);end;end;>> blocks(end,1:end)=1;>> blocks(1:end,end)=1;>> subplot(1,2,1);imshow(i);>> subplot(1,2,2);imshow(blocks,[]);提取四叉树分解的子块信息:>> i=[1 1 1 1 2 3 6 61 12 1 4 5 6 81 1 1 1 10 15 7 71 1 1 1 20 25 7 720 22 20 22 1 2 3 420 22 22 20 5 6 7 820 22 20 20 9 10 11 1222 22 20 20 13 14 15 16]; >> s=qtdecomp(i,5);>> [vals,r,c]=qtgetblk(i,s,4)vals(:,:,1) =1 1 1 11 12 11 1 1 11 1 1 1 vals(:,:,2) =20 22 20 2220 22 22 2020 22 20 2022 22 20 20r =15c =11>> i=[1 1 1 1 2 3 6 61 12 1 4 5 6 81 1 1 1 10 15 7 71 1 1 1 20 25 7 720 22 20 22 1 2 3 420 22 22 20 5 6 7 820 22 20 20 9 10 11 1222 22 20 20 13 14 15 16];>> s=qtdecomp(i,5);>> newvals=cat(3,zeros(4),ones(4));>> j=qtsetblk(i,s,4,newvals)j =0 0 0 0 2 3 6 60 0 0 0 4 5 6 80 0 0 0 10 15 7 70 0 0 0 20 25 7 71 1 1 1 123 41 1 1 1 5 6 7 81 1 1 1 9 10 11 121 1 1 1 13 14 15 16 使用Roberts边缘检测算子对图像进行边缘检测:>> i=imread('circuit.tif');>> bw1=edge(i,'roberts');>> subplot(1,2,1);imshow(i);>> subplot(1,2,2);imshow(bw1);使用Sobel进行边缘检测:>> i=imread('circuit.tif');>> bw1=edge(i,'roberts');>> subplot(1,2,1);imshow(i); >> subplot(1,2,2);imshow(bw1); >> clear;>> image=imread('circuit.tif'); >> i0=edge(image,'sobel');>> i1=edge(image,'sobel',0.06); >> i2=edge(image,'sobel',0.04); >> i3=edge(image,'sobel',0.02); >> subplot(2,3,1);imshow(image); >> subplot(2,3,2);imshow(i0); >> subplot(2,3,3);imshow(i1); >> subplot(2,3,4);imshow(i2); >> subplot(2,3,5);imshow(i3);使用Prewitt算子进行边缘检测:>> i=imread('rice.png');>> subplot(2,2,1);imshow(i);>> bw3=edge(i,'prewitt');>> subplot(2,2,2);imshow(bw3);>> [bw3,th3]=edge(i,'prewitt');>> bw3=edge(i,'prewitt',0.05,'horizontal'); >> subplot(2,2,3);imshow(bw3);>> bw3=edge(i,'prewitt',0.05,'vertical'); >> subplot(2,2,4);imshow(bw3);使用Log算子进行边缘检测:>> i=imread('circuit.tif');>> [bw1,th]=edge(i,'log');>> subplot(2,3,1);imshow(i);>> subplot(2,3,2);imshow(bw1); >> bw2=edge(i,'log',0.0056);>> subplot(2,3,3);imshow(bw2); >> h=fspecial('gaussian',5);>> [bw3,th3]=edge(i,'zerocross',[],h); >> subplot(2,3,4);imshow(bw3); >> bw4=edge(i,'zerocross',0.025,h); >> subplot(2,3,5);imshow(bw4);使用Canny算子进行边缘检测:>> i=imread('circuit.tif');>> subplot(1,3,1);imshow(i);>> [bw,th]=edge(i,'canny');>> subplot(1,3,2);imshow(bw);>> [bw1,th1]=edge(i,'canny',[0.2,0.6]); >> subplot(1,3,3);imshow(bw1);。
图像分割的阈值算法matlab实现
图像分割的阈值算法matlab实现【OTSU,1DEntropy,2DEntropy】今天看了几篇论文,实现了一下,没有验证各算法的有效性也没有进行定量比较OTSU% OTSU method% 2006/9/4clc;clear;%I = imread('E:\test\chinalake.bmp','bmp');I = imread('E:\test\lena.png','png');I = double(I);I = Medianfilter(I); % median filterh_Tmean = mean(mean(I));[height,width] = size(I);Size = height * width; % the size of the imageh_T = sum(sum(I)); % the total gray value of the imageG_min = min(min(I)); % the min gray value of the imageG_max = max(max(I)); % the max gray value of the iamge I_seg = zeros(height,width); % the array to store the segmented image thresh = 0; % the thresholdnum1 = 0;num2 = 0; % count the num of the pixel from the diffrient classP1 = 0;P2 = 0; % the probability of the different classh_T1 = 0;h_T2 = 0; % the total gray value of different classh_T1mean = 0;h_T2mean = 0; % the mean value of the classmax = 0;for thresh=G_min:G_max % find the best thresholdh_T1 = 0;h_T2 = 0;num1 = 0;for h=1:heightfor w=1:widthif I(h,w) <= threshnum1 = num1 + 1;h_T1 = h_T1 + I(h,w);endendendnum2 = Size - num1;h_T2 = h_T - h_T1;P1 = num1/Size;P2 = num2/Size;h_T1mean = h_T1/num1;h_T2mean = h_T2/num2;%D = P1*(h_T1mean - h_Tmean)^2 + P2*(h_T2mean - h_Tmean)^2;D1 = P1*P2*(h_T1mean - h_T2mean)^2; % the tow equation is equal if D1 > maxmax = D1;T_best = thresh; % T record the best threshendend%%%%%%% Seg the image %%%%%%%%%for i=1:heightfor j=1:widthif I(i,j) > T_bestI_seg(i,j) = 255;endendendT_bestfigure;imshow(uint8(I_seg));figure;imhist(uint8(I));***************************************************一维直方图熵阈值算法% 1D entropy thresholding method% Pun提出,Kapur对其阈值和熵进行改进% 两类:object 和background% P1 = sum(pi) i:1~T% P2 = sum(pi) i:T+1~255% HO = ln(P1) + H1/P1;% HB = ln(P2) + H2/P2;% H1 = -sum(pi*ln(pi)); i:1~T% H2 = -sum(pi*ln(pi)); i:T+1~255% H = HO + HB;% T_best = argmax(H);clc;clear;%I = imread('E:\test\chinalake.bmp','bmp');I = imread('E:\test\lena.png','png');I = double(I);I = Medianfilter(I); % median filter[height,width] = size(I);Size = height * width; % the size of the imageh_T = sum(sum(I)); % the total gray value of the imageG_min = min(min(I)); % the min gray value of the imageG_max = max(max(I)); % the max gray value of the iamgeI_seg = zeros(height,width); % the array to store the segmented image I_hist = zeros(1,256); % the array to store the hist of the imagethresh = 0; % the thresholdnum1 = 0;num2 = 0; % count the num of the pixel from the diffrient classP1 = 0;P2 = 0; % the probability of the different classh_T1 = 0;h_T2 = 0; % the total gray value of different classmax = 0;H1 = 0;H2 = 0; % the middle varH_object = 0;H_background = 0;H_total = 0; % the total entropyT_best = 0; % the best thresh%%%%% 计算直方图 %%%%%%for i=1:height % calculate the hist of the image for j=1:widthI_hist(I(i,j)+1) = I_hist(I(i,j)+1) + 1;endendfor thresh=G_min:G_max % find the best threshold H1 = 0;h_T1 = 0;H2 = 0;for h=1:heightfor w=1:widthif I(h,w) <= threshnum1 = num1 + 1;h_T1 = h_T1 + I(h,w);endendendnum2 = Size - num1;h_T2 = h_T - h_T1;P1 = num1/Size;P2 = num2/Size;for i=1:threshpx = I_hist(i+1)/Size;H1 = H1 + (-px*ln(px));endfor i=thresh+1:G_maxpx = I_hist(i+1)/Size;H2 = H2 + (-px*ln(px));endH_object = ln(P1) + H1/P1;H_background = ln(P2) + H2/P2;H_total = H_object + H_background;if H_total > maxmax = H_total;T_best = thresh;endend%%%%%%% Seg the image %%%%%%%%%for i=1:heightfor j=1:widthif I(i,j) > T_bestI_seg(i,j) = 255;endendendT_bestfigure;imshow(uint8(I_seg));figure;imhist(uint8(I));********************************************************** 2维直方图熵阈值算法% 二维直方图熵阈值法% 参考基于2D 熵阈值的铁谱磨粒图像分割方法,傅建平%廖振强,张培林,汪传忠,(南京理工大学机械学院,南京),%(军械工程学院,石家庄)% pixel gray% ^% |% | ==> 2D histgram% |% |% |__________________________> local grayclc;clear;%I = imread('E:\test\chinalake.bmp','bmp');I = imread('E:\test\lena.png','png');I = double(I);[height,width] = size(I);Size = height * width; % the size of the imageG_min = min(min(I)); % the min gray value of the imageG_max = max(max(I)); % the max gray value of the iamgeI_2Dhist = zeros(G_max+1,G_max+1); % the array to store the 2D hist of the imageI_mean = zeros(height,width); % the mean value of the local imageI_seg = zeros(height,width);WS = 3; % mean filter's window size 3*3nr = floor(WS/2);I_big = zeros(height+2*nr,width+2*nr); % the bigger array used to mean filterI_big(nr+1:height+nr,nr+1:width+nr) = I; % copy data from the original image%%%%%%%%%% mean filter %%%%%%%%%%%%%%%%% 获取局部区域灰度信息%%%%%for i=1:heightfor j=1:widthsum = 0;num = 0;for h=-nr:nrfor w=-nr:nrsum = sum + I_big(i+h,j+w);num = num + 1;endendI_mean(i,j) = sum/num;endend%%%% 构建2D直方图,横轴上以点象素灰度表示,纵轴上以局部区域灰度表示%%%%for i=1:heightfor j=1:widthh = I(i,j)+1; % 横轴信息,避免0,所以加1,象素灰度w = I_mean(i,j)+1; % 纵轴信息,避免0,所以加1,局部区域灰度I_2Dhist(h,w) = I_2Dhist(h,w) + 1; % 统计灰度对<pixel,local>的出现次数,构建2D直方图 endend% find the best thresh : hor_thresh,and ver_thresh %for ver_thresh=0:G_maxfor hor_thresh=0:G_maxsum1 = 0;sum2 = 0;H1 = 0;H2 = 0;for i=0:ver_threshfor j=0:hor_threshsum1 = sum1 + I_2Dhist(i+1,j+1);endendfor i=0:ver_threshfor j=0:hor_threshP1 = I_2Dhist(i+1,j+1)/sum1;H1 = H1 + P1*log(P1);endendif i < G_max & j < G_maxfor i=ver_thresh+1:G_maxfor j=hor_thresh+1:G_maxsum2 = sum2 + I_2Dhist(i+1,j+1);endendfor i=ver_thresh+1:G_maxfor j=hor_thresh+1:G_maxP2 = I_2Dhist(i+1,j+1)/sum2;H2 = H2 +P2*log(P2);endendendH_total = H1 + H2;if H_total > maxmax = H_total;ver_Tbest = ver_thresh;hor_Tbest = hor_thresh;endendend%%%%%% 分割%%%%%%%%for i=1:heightfor j=1:widthif I(i,j) < ver_Tbest & I_mean(i,j) < hor_TbestI_seg(i,j) = 0;elseif I(i,j) >= ver_Tbest & I_mean(i,j) >= hor_Tbest I_seg(i,j) = 255;endendendT_bestfigure;imshow(uint8(I_seg)); figure;imhist(uint8(I));。
Matlab中的图像分割与轮廓提取技巧

Matlab中的图像分割与轮廓提取技巧在数字图像处理中,图像分割是一个基本且关键的任务。
通过将图像划分为不同的区域或对象,图像分割可以帮助我们更好地理解图像中的内容,并提取出我们所需的信息。
而图像分割的一个重要部分就是轮廓提取,它可以帮助我们准确地描述图像中感兴趣对象的形状和边缘。
在本文中,将介绍Matlab中常用的图像分割与轮廓提取技巧。
一、基于阈值的图像分割方法阈值分割是一种常用的简单而有效的图像分割方法。
它基于图像中像素的灰度值,将图像分割成具有不同灰度的区域。
在Matlab中,可以使用im2bw函数将图像转换为二值图像,并提供一个阈值参数。
通过调整阈值值,我们可以得到不同的分割结果。
此外,Matlab还提供了一些自动阈值选择方法,如Otsu方法和基于最大类间方差的方法。
二、基于区域的图像分割方法基于区域的图像分割方法是一种将图像分割为不同区域的方法。
它通常基于一些与像素相关的特征,如颜色、纹理和形状。
在Matlab中,可以使用regionprops函数计算图像的区域属性,如面积、中心位置等。
然后,可以根据这些区域属性将图像分割成不同的区域。
此外,还可以使用图像均值漂移算法和超像素分割算法等进行基于区域的图像分割。
三、基于边缘的图像分割方法基于边缘的图像分割方法是一种通过提取图像中的边缘信息来进行分割的方法。
它通常基于边缘检测算法,如Canny算子和Sobel算子。
在Matlab中,可以使用edge函数实现边缘检测,并提供一些参数来调整边缘检测的结果。
通过检测图像中的边缘,我们可以得到图像的轮廓信息,并将图像分割成不同的部分。
四、轮廓提取技巧在图像分割中,轮廓提取是一个重要且常用的步骤。
它可以帮助我们准确地描述和表示感兴趣对象的形状和边界。
在Matlab中,可以使用一些函数来提取图像的轮廓,如bwboundaries函数和imcontour函数。
这些函数可以将二值图像或灰度图像中的轮廓提取出来,并可视化或保存为具有不同宽度和颜色的图像。
基于matlab的数字图像处理之图像阈值分割算法研究
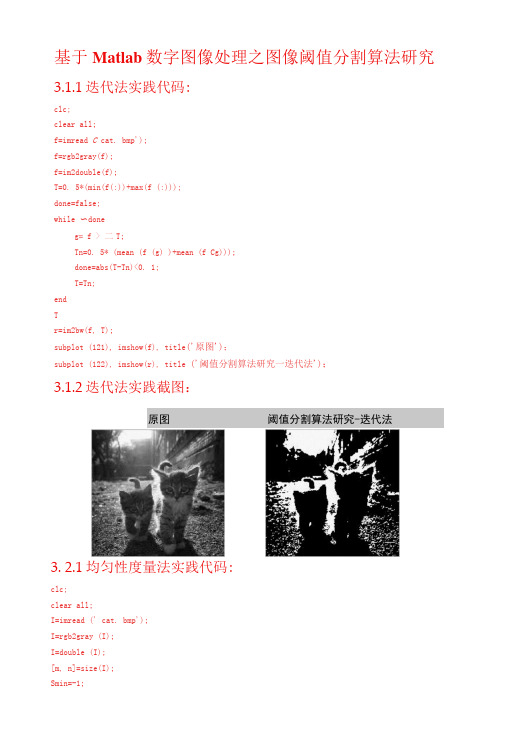
基于Matlab数字图像处理之图像阈值分割算法研究3.1.1迭代法实践代码:clc;clear all;f=imread C cat. bmp');f=rgb2gray(f);f=im2double(f);T=0. 5*(min(f(:))+max(f (:)));done=false;while 〜doneg= f > 二T;Tn=0. 5* (mean (f (g) )+mean (f Cg)));done=abs(T-Tn)<0. 1;T=Tn;endTr=im2bw(f, T);subplot (121), imshow(f), title('原图');subplot (122), imshow(r), title ('阈值分割算法研究一迭代法');3.1.2迭代法实践截图:原图阈值分割算法研究-迭代法3. 2.1均匀性度量法实践代码:clc;clear all;I=imread (' cat. bmp');I=rgb2gray (I);I=double (I);[m, n]=size(I);Smin=-1;for T=0:255suml=0; num1=0;sum2=0; num2=0;for i=l:mfor j=l:nif I(i, j)>=Tsum2=sum2+I (i,j);num2=num2+l;elsesuml=suml+I (i, j);numl=numl+l;endendendavel=suml/numl;ave2=sum2/num2;dl=-l;d2=-l;for i=l:mfor j=l:nif I(i, j)>=Td=(I (i, j)-ave2) "2;if d2=-ld2 二d;elsed2=d2+d;endelse qq3293559920d=(I(i, j)-avel) ^2;if dl==-ldl=d;elsedl=dl+d;endendendendpl=numl/(m*n);p2=num2/(m*n);S=pl*dl+p2*d2;if(Smin==-1)Smin=S;elseif(S<Smin)Smin=S;Th=T;endendendThsubplot (121), imshow(uint8(D), title('原图');for i=l:mfor j=l:nif I(i, j)>=ThI(i, j) =255;elseI(i, j)=0;endendendsubplot (122), imshow(I), title('阈值分割算法研究一均匀性度量法');3. 2.2均匀性度量法实践截图:原图阈值分割算法研究-均匀性度量法3. 3.1类间最大距离法实践代码:clc;clear all;I=imread C cat. bmp');I=rgb2gray(I);I二double ⑴;[m, n]=size(l);Smax=0;for T=0:255suml=0; num1=0;sum2=0; num2=0;for i=l:mfor j=l:nif I(i, j)>=Tsum2=sum2+I (i,j);num2=num2+l;elsesuml=suml+I (i,j);numl=numl+l;end qql706431899endendavel=suml/numl;ave2=sum2/num2;S=((ave2-T)*(T-ave1))/(ave2-ave1) 2;if(S>Smax)Smax=S;Th 二T;endendThsubplot (121), imshow(uint8(I)), title('原图');for i=l:mfor j=l:nif I(i, j)>=ThI(i, j)=255;elseI(i, j)=0;endendendsubplot (122), imshow(I), title('阈值分割算法研究一类间最大距离法');3. 3.2类间最大距离法实践截图:3. 4.1最大类内类间方差比法实践代码: clc;clear all;I=imread(,cat. bmp");I=rgb2gray(T);I二double (I);[m, n]=size(I);Smax=-1;for T=0:255suml=0; numl=0;sum2=0; num2=0;for i=l:mfor j=l:nif I(i,j)>=Tsum2=sum2+I (i,j);num2=num2+l;elsesuml=suml+I (i,j);nunil=numl + l;endendendavel=suml/numl;ave2=sum2/num2;ave=(suml+sum2)/(m*n);dl=-l;d2=-l;for i=l:mfor j=l:nif I(i,j)>=Td=(I (i, j)-ave2) ^2;if d2==-ld2=d;elsed2=d2+d;endelsed=(I (i, j)-avel) *2;if dl==-ldl=d;elsedl=dl+d;endendendendpl=numl/(m*n);p2=num2/(m*n);Sl=pl*(avel-ave)*2+p2*(ave2-ave) 2\S2=pl*dl+p2*d2;S=S1/S2;if S>SmaxSmax=S;Th =T;endendThsubplot (121), imshow(uint8(I)), title。
利用Matlab进行图像分割与边缘检测的实践方法

利用Matlab进行图像分割与边缘检测的实践方法图像分割和边缘检测是计算机视觉领域中非常重要的任务,它们在图像处理和分析中有着广泛的应用。
Matlab作为一种强大的科学计算工具,提供了丰富的图像处理函数和工具箱,可以帮助我们进行图像分割和边缘检测的实践。
本文将介绍利用Matlab进行图像分割和边缘检测的一些实践方法。
一、图像分割方法1. 阈值分割阈值分割是最常用的图像分割方法之一,它通过选取适当的阈值将图像中的不同区域分割开来。
在Matlab中,可以使用graythresh函数来自动选择合适的阈值。
例如,对于灰度图像I,可以使用以下代码进行阈值分割:```level = graythresh(I);BW = im2bw(I, level);```这里level是选取的阈值,BW是二值化后的图像。
2. 区域生长区域生长算法是一种基于像素相似性的图像分割方法,它从种子点出发,通过合并与种子点相似的像素,逐渐扩展出一个区域。
Matlab中提供了regiongrowing 函数,可以用于实现区域生长算法。
例如,对于灰度图像I,可以使用以下代码进行区域生长分割:```seed = [x, y]; % 种子点位置BW = regiongrowing(I, seed);```这里seed是种子点的位置,BW是分割得到的区域。
3. 水平线分割水平线分割是一种特殊的图像分割方法,适用于包含水平线结构的图像。
在Matlab中,可以使用hough函数进行直线检测,然后根据检测结果进行分割。
例如,对于二值化的图像BW,可以使用以下代码进行水平线分割:```[H, T, R] = hough(BW);P = houghpeaks(H, 10);lines = houghlines(BW, T, R, P);BW_separate = false(size(BW));for k = 1 : length(lines)xy = [lines(k).point1; lines(k).point2];xy(:, 2) = max(min(xy(:, 2), size(BW, 1)), 1); % 限制线段在图像范围内indices = sub2ind(size(BW), xy(:, 2), xy(:, 1));BW_separate(indices) = true;end```这里H是Hough变换的结果,T和R是Hough变换的参数,P是峰值点的位置,lines是检测到的直线数据结构,BW_separate是分割得到的区域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB 的图像阈值分割技术
摘要:本文主要针对图像阈值分割做一个基于MATLAB 的分析。
通过双峰法,迭
代法以及OUTS 法三种算法来实现图像阈值分割,并且就这三种算法做了一定的分析和比较,在加椒盐的图片上同时进行三种实验,做出比较,最终得出实践结论。
关键词:图像分割 MATLAB 阈值分割 算法 引言:图像分割是图像处理与计算机视觉领域低层次视觉中最为基础和重要的领域之一,它是对图像进行视觉分析和模式识别的基本前提.同时它也是一个经典难题,到目前为止既不存在一种通用的图像分割方法,也不存在一种判断是否分割成功的客观标准,图像阈值分割即是其中的一种方法。
阈值分割技术因其实现简单、计算量小、性能较稳定而成为图像分割中最基本和应用最广泛的分割技术,已被应用于很多的领域,在很多图像处理系统中都是必不可少的一个环节。
1、阈值分割思想和原理
若图像中目标和背景具有不同的灰度集合:目标灰度集合与背景灰度集合,且两个灰度集合可用一个灰度级阈值T 进行分割。
这样就可以用阈值分割灰度级的方法在图像中分割出目标区域与背景区域,这种方法称为灰度阈值分割方法。
在物体与背景有较强的对比度的图像中,此种方法应用特别有效。
比如说物体内部灰度分布均匀一致,背景在另一个灰度级上也分布均匀,这时利用阈值可以将目标与背景分割得很好。
如果目标和背景的差别是某些其他特征而不是灰度特征时,那么先将这些特征差别转化为灰度差别,然后再应用阈值分割方法进行处理,这样使用阈值分割技术也可能是有效的
设图像为f(x,y),其灰度集范围是[0,L],在0和L 之间选择一个合适的灰度阈值T ,则图像分割方法可由下式描述:
这样得到的g(x,y)是一幅二值图像。
(一)原理研究
图像阈值分割的方法有很多,在这里就其中三种方法进行研究,双峰法,迭代法,以及OUTS 法。
方法一:双峰法 方法原理:
双峰法是一种简单的阈值分割方法。
双峰法先将原图转为灰度图,然后将灰度图转为灰度直方图,灰度直方图就是灰度级的像素数n i 与灰度i 的二维关系,它反映了一幅图像上灰度分布的统计特性,在MATLAB 中使用函数imhist
T y x f T
y x f y x g ≥<),(),(10){
,(
来实现。
如果得到的灰度直方图呈现明显的双峰状,则选取双峰之间的谷底所对应的灰度级作为阈值分割。
方法二:迭代法 方法原理:
开始时候选择一个阈值作为初始估计值,然后按着某种策略不断得改进这个估计值,直到满足给定的准则为止。
(1) 求出图像最大灰度值Max 和最小灰度值Min ,初始阈值估计值
T 0.=(Max+Min)*0.5.
(2) 用T 0将图像分割为目标和前景。
图像分成两组像素:Z 1由所有灰度值大
于或等于T 0的像素组成,而Z 0由所有灰度值小于T 0的像素组成。
(3) 分别求出两者区域中的所有像素计算平均灰度值a 1和a 2。
(4) 计算新的阈值T1=(a 1+a 2)*0.5.
如果|T i+1-T i |<0.5,则退出循环,T i+1即为所求阈值;否则,将T i+1复制给T i ,重复(2)~(5)。
方法三:OTSU 法 方法原理 OTUS 又称:最大类间法,该算法是在使类间方差最大的自动确定阈值的方法,
是在判决分析最小二乘法原理的基础上推到得出的,其算法比较简单,是一种方便可行的阈值选取方法。
设原始灰度图像灰度级范围为[0,L],灰度级为i 的像素点数为n i ,则图像的全部像素数为:
n n n L o N 11......-+++=
11
=∑-=L i i
P
把图像中的像素按灰度值用阈值t 分成两类C 0和C 1,由灰度值在[0,t]之间的像素组成,由灰度值在[t+1,L-1]之间的像素组成,对于灰度分布概率,整幅图的均值为
u t ∑-==1
0L i i P i
因此,C 0和C 1的均值为:
()()()()
t w t t w T
t i i
o
i o
i
w ip w
ip --====∑∑+==1t 1
-L 1
1
1
t
μμ
μμμ
其中
()
)
(1)()(1
1
1
1
t w t w L t i i
r
t
i i
r
o
p C P w p C P w -======∑∑-+==
上面三式可得
u t= w 0u 0+ w 1u 1 类间方差定义为:
)
)
()(σ
1(002
102
1
20
2μμμμμμo T T w w w w B
---=
+=
让t 在[0,L-1]范围一次取值,使类间方差最大的他值即为OUTS 法的最佳阈值。
MATLAB 工具箱提供的graythresh 函数求取阈值。
算法:
1、双峰法图像阈值分割matlab code :
I=imread('cat.jpeg'); I=rgb2gray(I); imhist(I) 直方图:
说明:根据双峰法原理,观察到灰度图像直方图呈现明显的双峰状,则选取双峰之间的谷底所对应的灰度级作为阈值分割。
如上图,选取230作为分割点。
I=imread('cat.jpeg'); I=rgb2gray(I); figure
subplot(1,2,1) imshow(I);
[width,height]=size(I); title('原图')
for i=1:width
for j=1:height
if(I(i,j)<230)
RC(i,j)=0;
else
RC(i,j)=1;
end
end
end
subplot(1,2,2)
imshow(RC)
title('双峰法图像阈值分割处理效果图') 此图为C=230
此图为C=150
此图为C=30
由此可得,阈值的选取在双峰法里十分的重要。
2、迭代法实行阈值分割的matlab code:
I=imread('cat.jpeg');
I=rgb2gray(I);
figure
subplot(1,2,1)
imshow(I);
title('原图');
I=double(I);
T=(min(I(:))+max(I(:)))/2;
done=false;
i=0;
while ~done
r1=find(I<=T);
r2=find(I>T);
Tnew=(mean(I(r1))+mean(I(r2)))/2; done=abs(Tnew-T)<1;
T=Tnew;
i=i+1;
end
I(r1)=0;
I(r2)=1;
subplot(1,2,2)
imshow(I);
title('迭代后效果图);
通过迭代法求阈值后进行的分割:
3、OTSU算法进行图像阈值分割的matlab code: I=imread('cat.jpeg');
I=rgb2gray(I);
figure
subplot(1,2,1)
imshow(I);
title('原图')
[width,height]=size(I);
level=graythresh(I);
BW=im2bw(I,level);
subplot(1,2,2)
imshow(BW);
title('otsu算法阈值分割效果图');
(二)三者的比较研究
由结果可知:迭代法和OTSU法的作用效果相似,设计原理相对于双峰来说要复杂点,但是分割效果比双峰法好些,但是对于有噪音的图片进行分割,OUST法和迭代法相对双峰法的处理效果要差些。
I=imread('pink.jpg');
I=rgb2gray(I);
figure
subplot(1,2,1)
imshow(I);
title('原图');
I=imnoise(I,'salt & pepper',0.08);
subplot(1,2,2)
imshow(I);
title('加椒盐噪声');
三种算法同时进行图像阈值分割结果:
小结:经研究可知迭代法和OTSU法的作用效果相似,都属于自动阈值选择法,设计原理相对于双峰来说要复杂点,并且对有噪音的图片处理不是很好,而且迭代对于图像的细微处或者浅色的线条还没有很好的处分度。
双峰法虽简单,但应用范围小,对于那些峰值不太明显或者目标背景交界处两边像素在灰度值上有差别不是很明显的图像,用双峰法来处理效果就不是很明显了。
相对而言,这三种方法中,OTSU法是一种比较通用的方法。
参考文献:
王桥编著数字图像处理科学出版社
杨杰编著数字图像处理及MATLAB实现电子工业出版社
冈萨雷斯编著数字图像处理第二版中文版电子工业出版社
张德丰编著数字图像处理(MATLAB版)人民邮电出版社。