简述PMAC2型运动控制卡
PMAC

PMAC控制卡、PMAC多轴控制卡、PMAC运动控制卡、PMAC运动控制器
上海轶舜国际贸易有限公司特价美国PMAC控制卡、PMAC多轴控制卡、PMAC运动控制卡、PMAC运动控制器等产品。
pmac(program multiple axises controller)是美国delta tau公司生产制造的多轴运动控制卡,是世界上功能最强,计算速度最快,质量可靠的运动控制产品。
随着中国汽车,机械,电子,军工等产业的飞速发展,pmac多轴运动控制卡将为中国的制造业和自动化产业提供更多的选择。
涉及机器人、数控机床、坐标测量机、激光加工、雕刻机、旋转刀、x-y系统、以及高速印刷、包装、贴标机等各类自动化设备。
PMAC多轴运动控制卡学习(硬件)
目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC的含义和特点 (2)1.2 PMAC的分类及区别 (2)1.2.1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2.1 Turbo PMAC Clipper硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper控制器可选附件 (6)2.2.2.1 轴接口板 (6)2.2.2.2 反馈接口板 (7)2.2.2.3 数字I/O接口板 (7)第三章 Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3.2 控制卡供电 (7)3.2.1 数字电源供电 (7)3.2.2 DAC(数字/模拟转换)输出电路供电 (8)3.2.3 标志位供电 (8)3.3 限位及回零开关 (8)3.3.1 限位类型 (8)3.3.2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4.2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3.4.4 放大器使能信号(AENAn/DIRn) (10)3.4.5 放大器错误信号(FAULT-) (10)3.4.6 可选模拟量输入 (11)3.4.7 位置比较输出 (11)3.4.8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3.8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1.接口各针脚定义 (21)2. 电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
PMAC2A-PC104卡 IO使用说明
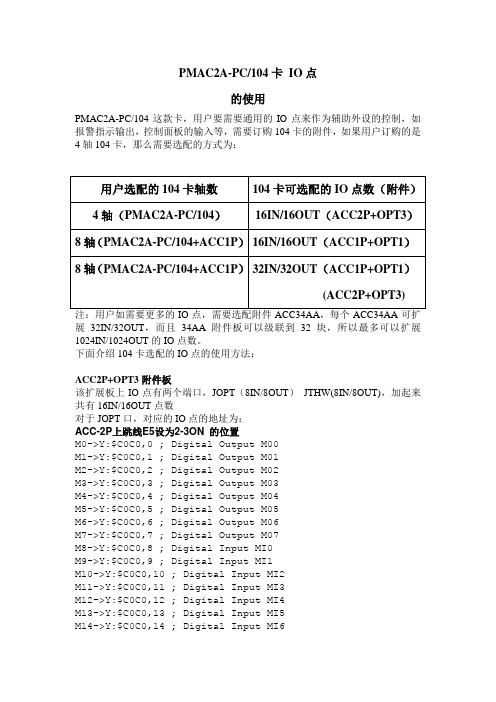
PMAC2A-PC/104卡IO点的使用PMAC2A-PC/104这款卡,用户要需要通用的IO点来作为辅助外设的控制,如报警指示输出,控制面板的输入等,需要订购104卡的附件,如果用户订购的是4轴104卡,那么需要选配的方式为:展32IN/32OUT,而且34AA附件板可以级联到32块,所以最多可以扩展1024IN/1024OUT的IO点数。
下面介绍104卡选配的IO点的使用方法:ACC2P+OPT3附件板该扩展板上IO点有两个端口,JOPT(8IN/8OUT)JTHW(8IN/8OUT),加起来共有16IN/16OUT点数对于JOPT口,对应的IO点的地址为:ACC-2P上跳线E5设为2-3ON 的位置M0->Y:$C0C0,0 ; Digital Output M00M1->Y:$C0C0,1 ; Digital Output M01M2->Y:$C0C0,2 ; Digital Output M02M3->Y:$C0C0,3 ; Digital Output M03M4->Y:$C0C0,4 ; Digital Output M04M5->Y:$C0C0,5 ; Digital Output M05M6->Y:$C0C0,6 ; Digital Output M06M7->Y:$C0C0,7 ; Digital Output M07M8->Y:$C0C0,8 ; Digital Input MI0M9->Y:$C0C0,9 ; Digital Input MI1M10->Y:$C0C0,10 ; Digital Input MI2M11->Y:$C0C0,11 ; Digital Input MI3M12->Y:$C0C0,12 ; Digital Input MI4M13->Y:$C0C0,13 ; Digital Input MI5M14->Y:$C0C0,14 ; Digital Input MI6M15->Y:$C0C0,15 ; Digital Input MI7以上为8入8出16个点对应地址,由于104卡也属于2型卡,所以上述点是输入还是输出,要靠下面的方向地址来定义。
pmac第一、二、三章 用户指导
第一章用户指导PMAC综述Deltu Tau Data System公司的可编程多轴运动控制卡Ⅱ型(PMAC2),是一个高性能伺服运动控制器,通过数字信号处理器(DSP),以及灵活的高级语言最多可控制八轴同时运动。
PMAC2给多轴控制器提供前所未有的性价比,Motorola的DSP56002是PMAC2的CPU,处理所有八轴的计算。
PMAC2有六种类型的板卡,PMAC2 – PC,PMAC2 – PC ultralit,PMAC2 – Lite,PMAC2 – VME,PMAC2 – VME ultralite和MINI PMAC2,这些卡在外型,总线接口形式和I / O端口的性能方面彼此各不相同。
所有这些形式的卡都有相同的在板固件,所以PMAC20的固件程序可以在其它任何形式的板卡运动。
任何形式的PMAC2型板既可以脱机运行,又可以通过串行或总线接口用一台主机来控制它运行。
适应能力作为一种具有广泛用途的控制器,PMAC2能用于各种各样的设备,从那些精密到小于百万分之一英寸的精密仪器到那些需要数百千瓦或马力的大型设备,它的多种用途包括机器人、机床、木工机械、装配线、食品加工、印刷、包装、物料装卸、摄像机控制、自动焊接、硅片加工,激光切割以及许多其他运动控制。
为一个任务的配置PMAC2可以通过硬件设置的选择(通过选件和备件),参数的设置和运动及PLC程序的编写,从而实现一种特殊用途。
每一个PMAC2固件能够控制八个轴。
这八个轴可以相互联致力以完成一个复杂的运动。
每一个轴也可以分别在各自坐标系中独立运动,从而得到八个完独立的运动。
或者在它们之间组合的形式。
PMAC2的CPU与轴的通信是通过特殊设计的门阵列ICs(作为DSPGATE而提到的)来实现,每一个ICs能够控制四个模拟输出通道,四个作为输入的编码器,和四个来自附件的模拟驱动输入,一个PMAC2可以运用一到四个门阵列ICs,从而规定硬件的配置总数,以便统计输入和输出的数量和类型,最多可以有16块PMAC2卡完全同步级链在一起使用,控制总128根轴。
PMAC多轴运动控制卡学习(硬件)
目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC的含义和特点 (2)1.2 PMAC的分类及区别 (2)1.2.1 PMAC的分类 (2)1.2.2 PMAC 1型卡与2型卡的主要区别 (2)第二章Turbo PMAC Clipper控制器硬件配置 (3)2.1 Turbo PMAC Clipper控制器简介 (3)2.2 Turbo PMAC Clipper硬件配置 (3)2.2.1 Turbo PMAC Clipper硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper控制器可选附件 (6)2.2.2.1 轴接口板 (6)2.2.2.2 反馈接口板 (7)2.2.2.3 数字I/O接口板 (7)第三章 Turbo PMAC Clipper设备连接 (7)3.1 板卡安装 (7)3.2 控制卡供电 (7)3.2.1 数字电源供电 (7)3.2.2 DAC(数字/模拟转换)输出电路供电 (8)3.2.3 标志位供电 (8)3.3 限位及回零开关 (8)3.3.1 限位类型 (8)3.3.2 回零开关 (8)3.4电机信号连接 (9)3.4.1增量式编码器连接 (9)3.4.2 DAC 输出信号 (9)3.4.3 脉冲&方向(步进)驱动 (10)3.4.4 放大器使能信号(AENAn/DIRn) (10)3.4.5 放大器错误信号(FAULT-) (10)3.4.6 可选模拟量输入 (11)3.4.7 位置比较输出 (11)3.4.8 串行接口(JRS232) (11)3.5 设备连接示例 (12)3.6 接口及指示灯定义 (13)3.7 跳线定义 (15)3.8 Turbo PMAC Clipper端口布置及控制结构图 (19)附件 (21)1.接口各针脚定义 (21)2. 电路板尺寸及孔位置 (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
PMAC培训

PMAC应用培训计划第一天 上午9:30 -10:00 交流培训需求 10:00 -11:40 Pmac卡概述及clipper硬件介绍(含Pmac-pc104) 11:50 -12:50 吃午饭 下午1:00 -2:00 Pewin32pro及相关软件的使用 2:00 -4:00 分组实际操作练习 第二天 上午9:30 -11:40 在线指令和变量说明及注意事项(含Pmac-pc104) 11:50 -12:50 吃午饭 下午1:00 -2:00 PID调节方法 2:00 -4:00 分组实际操作练习 第三天 上午9:30 -11:40 简单运动的编写和plc程序的编写方法 11:50 -12:50 吃午饭 下午1:00 -2:00 简介上位软件的通讯 2:00 -4:00 答疑及分组实际操作练习PMAC应用培训北京钧义志成科技发展有限公司PMAC多轴运动控制卡• PMAC的含义: • PMAC是program multiple axis controller 可编程的多轴运动控制卡。
• PMAC的特点: • PMAC卡是美国Deltatau公司的产品,是集 运动轴控制,和PLC控制以及数据采集的多 功能的运动控制产品。
PMAC卡1型和2型卡的主要区别• 1型卡 控制信号为模拟量,+-10V • 2型卡 控制信号为数字量,直接输出 PWM脉宽调制信号PMAC卡轴数类型• 2轴卡 PMAC MINI PCI MINI PMAC2 • 4轴卡 PMAC PCI Lite PMAC2 PCI Lite PMAC2A-104 • 8轴卡 PMAC PCI PMAC2 PCI PMAC2A-104+ACC1P • 32轴卡 Turbo PMAC PCI Turbo PMAC2 PCIPMAC新产品Clipper• 4轴 Clipper • 8轴 Clipper + Acc1P • 12轴 Clipper + Acc1P(2块)PMAC通讯方式类型• • • • PCI PC104 总线 USB 通讯 (PMAC2A-104 UMAC) 串口 通讯 RS422 或RS232 网卡通讯 ( PMAC2A-104 Clipper)ClipperTurbo PMAC2-Eth-Lite controllerTurbo PMAC Clipper 简介• Turbo PMAC Clipper是一个基于 TurboPMAC2 CPU功能齐全,结构紧凑, 成本的多轴控制器,标配以太网和RS232 通信接口和内置的I O. Clipper提供完整 TurboPMAC 2处理器,并提供最低配置4轴 伺服或步进控制32个数字I / O点。
第六章 PMAC2速度和转矩控制设置

第六章 PMAC2速度和转矩控制设置单个指令输出如果PMAC2不对电机进行换向,它仅对电机提供一个指令输出控制值,通常表示速度或转矩指令(力或电流),一般情况下,输出的是模拟信号电压的编码。
当用比例阀或伺服阀驱动液压缸时,是PMAC2就象控制对电机速度一样控制其动态性能。
硬件设置PMAC2在速度模式或转矩模式下的通过模拟量控制电机,ACC-8E模拟接口板或者相应的机器通道接口必须使用ACC-8E接口板包括DACS、运放输出,编码器、标志接口和光电隔离电路,下面来讨论ACC-8E的使用。
DAC输出信号ACC-8E的DACA输出应接到速度模式或转矩模式放大器的输入端,如果放大器上的输入是单端的,只用DAC + 输出端,让多余的DAC – 输出端悬空,不要将它们接地,如果放大器的输入端采用差动形式,那么DAC + 和DAC –两个输出端都可用上,若是这样,则把ACC – 8E上的AGND参考端连接到放大器输入参考电压端。
放大器使能和出错接口ACC – 8E的放大器使能输入端采用固态继电器,常开、常闭、漏极或涂极配置,电压可以12V到24V 选择。
ACC - 8E放大器的错误信号可通过AC光隔离器,漏极或使源极配置,电压从12V到24V可供选择。
编码器速度反馈ACC – 8E可接收计通道的正交编码器反馈,即可以是单端输入也可以是差动输入,范围从5到12V。
其他信号端ACC – 8E对于越程极限输入,回零极限输入和用户标识输入具有AC光隔离功能。
PMAC2参数设置设置硬件信号的参数为了模拟速度和力矩模式输出的正确运行,必须设置全部的和多通道的硬件工作参数,这些变量在I900 – I909范围内。
伺服时钟频率控制:I900、I901、I902在SERVO时钟的每个循环过程中,PMAC2更新指令位置(插补)。
并闭合所有电机的位置环/速度环,是否通过PMAC2在有电机换相时闭合电流环。
一般情况下,伺服时钟频率是1KHz到4KHz,默认频率2.25KHz适用于大多数场合。
运动控制卡资料

运动控制卡开放式运动控制器PMAC1.PMAC简介PMAC(programmable multi-axes controller)是美国Delta Tau公司九十年代推出的开放式多轴运动控制器,它提供运动控制、离散控制、内务处理、同主机的交互等数控的基本功能。
PMAC内部使用了一片Motorola DSP 56003数字信号处理芯片,它的速度、分辨率、带宽等指标远优于一般的控制器。
伺服控制包括PID加Notch和速度、加速度前馈控制,其伺服周期单轴可达60μs,二轴联动为110μs。
产品的种类可从二轴联动到三十二轴联动。
甚至连接MACRO现场总线的高速环网,直接进行生产线的联动控制。
与同类产品相比,PMAC的特性给系统集成者和最终用户提供了更大的柔性。
它允许同一控制软件在三种不同总线(PC-XT和AT,VME,STD)上运行,由此提供了多平台的支持特性。
并且每轴可以分别配置成不同的伺服类型和多种反馈类型。
2.PMAC的分类PMAC卡按控制电机的控制信号来分,有1型卡和2型卡,1型卡输出±10V模拟量。
主要用速度方式控制伺服电机.2型卡输出PWM数字量信号,可直接变为PULSE+DIR信号.来控制步进电机和位置控制方式的伺服电机。
PMAC卡按控制轴数来分,有2轴卡: MINI PMAC PCI4轴卡:PMAC PCI Lite,PMAC2 PCI Lite,PMAC2A-PC/104及Clipper8轴卡:PMAC-PCI,PMAC2-PCI和PMAC2A-PC/104及Clipper32轴卡:TURBO PMAC和TURBO PMAC2PMAC卡按通讯总线形式分,有:ISA总线,PCI总线,PCI04总线,网口和VME总线。
目前,PMAC各种轴数的1型和2型卡,都有上述的计算机总线方式供选择。
PMAC除上述板卡形式外。
还可以提供集成的系统级产品.有:UMAC ADVANTAGE400 、ADVANTAGE900等,具体分类可以参考北京泰诺德公司网站。
PMAC多轴运动控制卡

E-MOTION
PMAC多轴运动控制卡
PMAC 2-PC104 型卡接线
3、模拟量数据采集(A/D转换)
在板选项(J1 口) OPTION 12 : 2路A/D 输入 (12位分辨率) 附件选项 ACC-1P OPT2 : 2路A/D 输入 (12位分辨率) )
Ix02 指令输出地址
Ix03 位置环反馈地址 Ix04 速度环反馈地址
E-MOTION
PMAC多轴运动控制卡
PMAC 调整
PMAC的 伺服算法必须设置以适用于系统电机和放大 器的工作. 设置可通过I变量的调整,获取适当的PID增益数值称作 调整
需要学习: W PID 增益的含义 PID 伺服环的功能 如何设置系统 PID 增益 .
典型 P.I.D 伺服环
Following Error 跟随误差
CPU 24-BIT 40/60/80 MHz DSP56002
WATCHDOG TIMER
DSP GATE1 4-Channel SERVO ASIC
DSP GATE1 4-Channel SERVO ASIC
PMAC 系统应用
硬件安装 接口及接线 连结检查,E跳线
软件设置和定义
1、PMAC与上位机通讯 2、各变量的设置、定义
DAC Locations
指令 位置
位置 跟随误差
Ix02 PI CV+ DACn DACn+1
AMP
+
反馈位置 D
-
Y: $C002-$C03B
速度 反馈
LOAD
ENC
Encoder Table Ix04 ENCn ENCn+1
MOT LIN ENC
PMAC卡的分类及各种卡的区别

PMAC卡的分类及各种卡的区别一、前言为了让公司员工以及客户能在近短的时间内掌握PMAC卡的基本应用,能简单操作PMAC卡,特编写次培训教材,希望大家提出宝贵的修改意见。
一、PMAC的分类PMAC主要分为板卡级的和系统级的;系统级分为QMAC和UMAC;板卡级的分为是Turbo卡还是Non-Turbo卡,在Turbo和Non-Turbo中又分是PMAC1(一型卡一般不标1,默认是PMAC)还是PMAC2。
Turbo和Non-Turbo的主要区别在于:●Turbo 可以扩展到32轴而Non-Turbo最多可以扩展到8轴●Turbo卡有lookahead和方向运动学的功能而Non-Turbo没有●Turbo卡有扩展的伺服算法而Non-Turbo没有PMAC1和PMAC2的主要区别在于:●PMAC1在板上的输出是±10V模拟量控制而PMAC2是±10V模拟量控制、3相直接PWM数字输出控制、脉冲+方向输出控制;从卡的外形上看PMAC1的轴接口是60芯的(四通道/接口)而PMAC2的轴接口是100芯的(2通道/接口)I)、PMAC板卡级产品型号说明从上图可以看出PMAC板卡的型号是A PMAC B - C DA:CPU类型空= 非Turbo类型,软件能控制8轴;Turbo = Turbo类型,软件能控制32轴;B:伺服接口类型空= PMAC(1)型卡,±10V模拟量控制;1.5 = PMAC(1)型卡,±10V模拟量控制,用Flash来备份;2 = PMAC2型卡●±10V模拟量控制(单端或差动的)●3相直接PWM数字输出控制●脉冲+方向输出控制2A= PMAC2型卡,内置±10V模拟量控制(也)C:总线类型空/PC = ISA 总线PCI = PCI 总线PC/104 = PC/104总线VME = VME总线D:伺服接口通道数空= 在板4或8个通道Lite =在板4个通道Mini =在板2个通道Ultralite =在板没有通道(仅仅是MACRO 光纤通讯)例1:Turbo PMAC2 – PCI Ultralite首先是Turbo卡具有扩展32轴的能力(即是控制32轴的固件),PMAC2是PMAC 二型卡具有±10V模拟量、3相直接PWM和脉冲+方向输出控制,PCI是PCI的总线,Ultralite是采用光纤通讯在板上没有轴通道芯片。
PMAC2 PC - 104运动控制器的AGV底盘控制系统应用设计
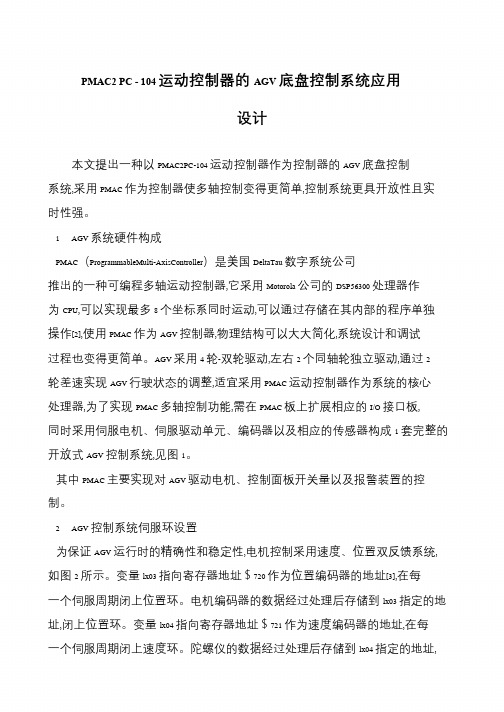
PMAC2 PC - 104 运动控制器的AGV 底盘控制系统应用
设计
本文提出一种以PMAC2PC-104 运动控制器作为控制器的AGV 底盘控制系统,采用PMAC 作为控制器使多轴控制变得更简单,控制系统更具开放性且实时性强。
1AGV 系统硬件构成
PMAC(ProgrammableMulti-AxisController)是美国DeltaTau 数字系统公司推出的一种可编程多轴运动控制器,它采用Motorola 公司的DSP56300 处理器作为CPU,可以实现最多8 个坐标系同时运动,可以通过存储在其内部的程序单独操作[2],使用PMAC 作为AGV 控制器,物理结构可以大大简化,系统设计和调试过程也变得更简单。
AGV 采用4 轮-双轮驱动,左右2 个同轴轮独立驱动,通过2 轮差速实现AGV 行驶状态的调整,适宜采用PMAC 运动控制器作为系统的核心处理器,为了实现PMAC 多轴控制功能,需在PMAC 板上扩展相应的I/O 接口板, 同时采用伺服电机、伺服驱动单元、编码器以及相应的传感器构成1 套完整的开放式AGV 控制系统,见图1。
其中PMAC 主要实现对AGV 驱动电机、控制面板开关量以及报警装置的控制。
2AGV 控制系统伺服环设置
为保证AGV 运行时的精确性和稳定性,电机控制采用速度、位置双反馈系统, 如图2 所示。
变量lx03 指向寄存器地址$720 作为位置编码器的地址[3],在每
一个伺服周期闭上位置环。
电机编码器的数据经过处理后存储到lx03 指定的地址,闭上位置环。
变量lx04 指向寄存器地址$721 作为速度编码器的地址,在每
一个伺服周期闭上速度环。
陀螺仪的数据经过处理后存储到lx04 指定的地址,。
Mpc02运动控制卡用户手册
MPC02运动控制卡操作手册(2.0版)目录1概述 (1)1.1MPC02的软硬件简介 (1)1.2MPC02的结构 (2)1.3MPC02的技术特性和使用范围 (2)1.4MPC02的运动控制功能 (3)1.4.1单轴运动控制 (3)1.4.2多轴独立运动控制 (4)1.4.3多轴插补运动控制 (4)1.4.4运动指令执行方式 (5)1.4.5光码盘反馈和其它能力 (6)1.5MPC02型号说明 (6)2控制卡的安装 (8)2.1硬件安装 (8)2.2软件安装 (8)2.2.1软件使用要求 (8)2.2.2软件安装 (8)3MPC02接口 (15)3.1信号接口定义 (15)3.2接线方法 (16)4运动控制系统的开发 (19)4.1开发W INDOWS下的运动控制系统 (19)4.1.1开发Visual Basic控制程序 (19)4.1.2用Visual C++开发控制程序 (20)4.1.3获取错误代码 (22)5函数描述 (23)5.1控制卡和轴设置函数 (23)5.2运动指令函数 (27)5.2.1独立运动函数 (27)5.2.2插补运动函数 (29)5.3制动函数 (33)5.4位置和状态设置函数 (34)5.5位置和状态查询函数 (35)5.5.1位置查询函数 (35)5.5.2状态查询函数 (38)5.6I/O口操作函数 (41)5.7其它函数 (44)5.8错误代码函数 (47)6常见问题及解决方法 (48)6.1基本功能及实现方法 (48)6.1.1函数库初始化 (48)6.1.2简单的定位运动 (49)6.1.3简单的连续运动和回原点运动 (49)6.1.4多轴插补运动 (50)6.1.5读取编码器反馈 (51)6.2多指令连续运动 (51)6.3多指令连续运动时的升降速处理 (52)6.3.1功能说明 (52)6.3.2实现方法及应注意的问题 (52)6.4运动变速 (53)6.5正确判断前一个运动指令是否执行完毕 (54)6.6MPC02卡安装过程中常见问题及解决 (55)6.6.1Windows起动后未出现检测到PCI Card的信息 (55)6.6.2出现了检测到PCI Card的信息,但无法正确加载驱动程序 (55)6.6.3驱动程序安装正确,但无法正常发脉冲 (56)6.7其它问题及解决方法 (56)6.7.1运行EXE文件时系统显示找不到DLL文件 (56)6.7.2如何将开发的软件系统制作成安装程序后发行给最终用户 (57)6.7.3软件能够正常启动,但无法产生运动 (57)6.7.4如何升级函数库 (57)6.7.5减速、原点信号的使用 (57)6.7.6如何提高速度精度 (58)6.7.7如何实现方向信号超前于脉冲信号 (58)6.7.8如何利用Z脉冲实现精确回原点 (58)6.7.9多卡共用问题 (58)6.8C++B UILDER下的L IB文件如何获得 (59)6.9如何避免与其他设备的冲突 (59)6.10错误代码表 (59)7函数索引 (62)8附录 (64)8.1两轴步进控制系统示例 (64)8.1.1系统配置 (64)8.1.2控制电路接线图 (64)8.2单轴数字式伺服控制系统示例 (65)8.2.1系统配置 (65)8.2.2控制电路接线图 (65)8.3PC打印机口用作I/O口 (67)8.4PC机I/O地址分配 (68)8.5PC机中断线分配 (69)概述1概述1.1 MPC02的软硬件简介MPC02控制卡是基于PC机PCI总线的步进电机或数字式伺服电机的上位控制单元,它与PC机构成主从式控制结构:PC机负责人机交互界面的管理和控制系统的实时监控等方面的工作(例如键盘和鼠标的管理、系统状态的显示、控制指令的发送、外部信号的监控等等);MPC02卡完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等等)。
PMAC卡简介
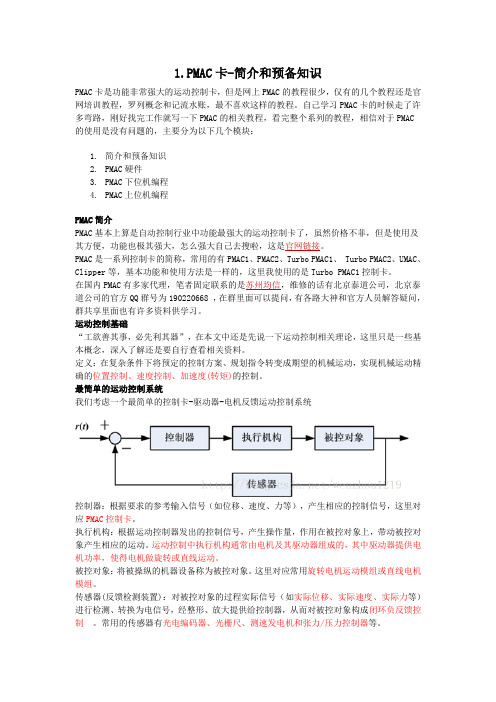
1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。
PMAC卡的分类及各种卡的区别
PMAC卡的分类及各种卡的区别一、前言为了让公司员工以及客户能在近短的时间内掌握PMAC卡的基本应用,能简单操作PMAC卡,特编写次培训教材,希望大家提出宝贵的修改意见。
一、PMAC的分类PMAC主要分为板卡级的和系统级的;系统级分为QMAC和UMAC;板卡级的分为是Turbo卡还是Non-Turbo卡,在Turbo和Non-Turbo中又分是PMAC1(一型卡一般不标1,默认是PMAC)还是PMAC2。
Turbo和Non-Turbo的主要区别在于:●Turbo 可以扩展到32轴而Non-Turbo最多可以扩展到8轴●Turbo卡有lookahead和方向运动学的功能而Non-Turbo没有●Turbo卡有扩展的伺服算法而Non-Turbo没有PMAC1和PMAC2的主要区别在于:●PMAC1在板上的输出是±10V模拟量控制而PMAC2是±10V模拟量控制、3相直接PWM数字输出控制、脉冲+方向输出控制;从卡的外形上看PMAC1的轴接口是60芯的(四通道/接口)而PMAC2的轴接口是100芯的(2通道/接口)I)、PMAC板卡级产品型号说明从上图可以看出PMAC板卡的型号是A PMAC B - C DA:CPU类型空= 非Turbo类型,软件能控制8轴;Turbo = Turbo类型,软件能控制32轴;B:伺服接口类型空= PMAC(1)型卡,±10V模拟量控制;1.5 = PMAC(1)型卡,±10V模拟量控制,用Flash来备份;2 = PMAC2型卡●±10V模拟量控制(单端或差动的)●3相直接PWM数字输出控制●脉冲+方向输出控制2A= PMAC2型卡,内置±10V模拟量控制(也)C:总线类型空/PC = ISA 总线PCI = PCI 总线PC/104 = PC/104总线VME = VME总线D:伺服接口通道数空= 在板4或8个通道Lite =在板4个通道Mini =在板2个通道Ultralite =在板没有通道(仅仅是MACRO 光纤通讯)例1:Turbo PMAC2 – PCI Ultralite首先是Turbo卡具有扩展32轴的能力(即是控制32轴的固件),PMAC2是PMAC 二型卡具有±10V模拟量、3相直接PWM和脉冲+方向输出控制,PCI是PCI的总线,Ultralite是采用光纤通讯在板上没有轴通道芯片。
PMAC多轴运动控制卡培训

PMAC JOG S 曲 线 加 速 轨 迹 曲 线
PMAC JOG S 曲 线与 直 线 加 速 轨 迹 曲 线
PMAC 电机回零指令及相关 I 变量
回零指令: #n HOME (HM) ; 电机n 执行回零运动
#n HOMEZ(HMZ)
;电机n不执行实际回 零运动,将当前位 置清零。
0:HM信号
1:+LIM信号 2:- LIM信号 3: FAULT信号
PMAC 电机回零指令及相关 I 变量
回零相关的I 变量:
I902(#1为例)(I9n2 PMAC 2 型卡): 回零信号的捕捕捉方式,可设置如下:
PMAC 卡 如 何 编 写 运 动 程 序
1. 定义坐标系:& n n为1-8个坐标系
2. 定义坐标轴:#n->(常数) X 或(Y Z U V W A B C)
n为1-8电机, A 为一常数。
定义举例: &1
#1->x #2->y &2 #4->20x #6->25.4y
PMAC 卡 如 何 编 写 运 动 程 序
定义举例: &1
#1->x #2->x &;y
不正确定义: &1 #1->x
#1->y
PMAC 卡 如 何 编 写 运 动 程 序
坐标轴定义矩阵:PMAC卡可如下定义轴矩阵
#1->a11X+a12Y+a13Z+b1
#2->a21X+a22Y+a23Z+b2
#3->a31X+a32Y+a33Z+b3
简介pmac运动控制卡
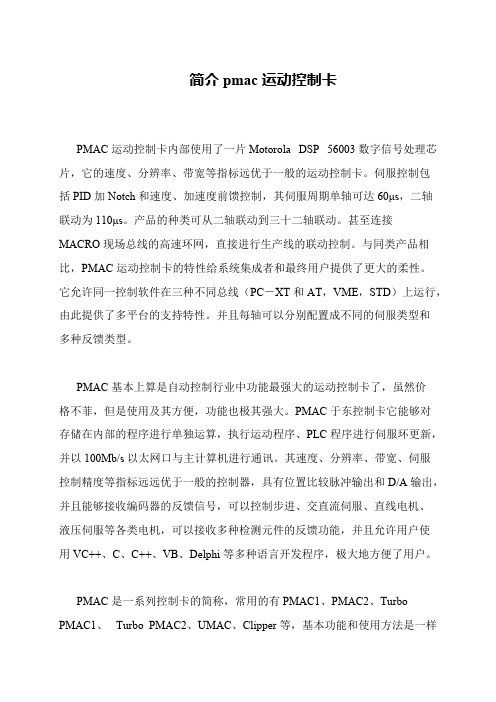
简介pmac运动控制卡
PMAC运动控制卡内部使用了一片Motorola DSP 56003数字信号处理芯片,它的速度、分辨率、带宽等指标远优于一般的运动控制卡。
伺服控制包
括PID加Notch和速度、加速度前馈控制,其伺服周期单轴可达60μs,二轴
联动为110μs。
产品的种类可从二轴联动到三十二轴联动。
甚至连接
MACRO现场总线的高速环网,直接进行生产线的联动控制。
与同类产品相比,PMAC运动控制卡的特性给系统集成者和最终用户提供了更大的柔性。
它允许同一控制软件在三种不同总线(PC-XT和AT,VME,STD)上运行,由此提供了多平台的支持特性。
并且每轴可以分别配置成不同的伺服类型和
多种反馈类型。
PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价
格不菲,但是使用及其方便,功能也极其强大。
PMAC于东控制卡它能够对
存储在内部的程序进行单独运算,执行运动程序、PLC程序进行伺服环更新,并以100Mb/s以太网口与主计算机进行通讯。
其速度、分辨率、带宽、伺服
控制精度等指标远远优于一般的控制器,具有位置比较脉冲输出和D/A输出,并且能够接收编码器的反馈信号,可以控制步进、交直流伺服、直线电机、
液压伺服等各类电机,可以接收多种检测元件的反馈功能,并且允许用户使
用VC++、C、C++、VB、Delphi等多种语言开发程序,极大地方便了用户。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样。
PMAC教材
1.PMAC控制卡及泰道公司简介1.1PMAC控制卡PMAC是可编程多轴控制器(Programmable Multi-Axis Controller)的简称,是美国泰道(Delta Tau Data Systems, Inc )公司生产的功能强大的运动控制器,PMAC是目前世界上功能最强的运动控制器,同时也是当前开放式数控系统控制器的突出代表1.2泰道公司介绍泰道公司拥有三十多年丰富的运动控制经验,是首屈一指的创新型、高性能机器控制专家,拥有全球数百万轴的惊人控制能力;自从上世纪90年代初推出第一款基于DSP的8轴的PMAC产品,每三年左右便会推出一款新的产品,如今最新的第七代产品Power PMAC(基于Power PC)已达到惊人的256轴的控制能力。
1.3应用范围由于其灵活的结构和开放性的编程接口,PMAC有着非常广泛的从最简单的到最复杂的应用,如半导体制造、航空、通用自动化、机器人控制、半导体生产线自动化、各类数控机床、医药设备、各种测量和定位机具、包装生产流水线自动化等等。
以下是在一些公司中1.4PMAC特性PMAC是一台具有独立内存、独立运算操作能力的计算机,采用泰道独有的实时内核(基于DSP的卡)或实时Linux操作系统(基于Power PC的卡)通过存储在自己内部的程序进行单独的操作;它还是一台实时的、多任务的计算机,能自动对任务进行优先等级判别,先执行优先级高的任务。
PMAC既可以独立工作亦可按主机的命令进行工作,它和主机的通讯可以通过串行口也可以通过总线进行,通过总线通讯时,还可以将中断信号引入主机,从而实现非常灵活有效的控制系统。
PMAC可以通过灵活的类似Basic的高级语言(Power PMAC还可以用C语言)控制多轴运动,提供了运动控制、可编程逻辑控制、同主机交互等基本功能;并具有各种现场总线和多种反馈装置接口。
PMAC的最大特点是开放性。
允许用户根据自己的用途使用内部寄存器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简述PMAC2型运动控制卡
发布时间:2013.09.18
PMAC2型运动控制卡
PMAC2A-PC/104是PMAC板卡级系列产品中的一员,它被设计成OEM系列的产品,在提供齐全的PMAC 板卡功能的同时,拥有更小巧的结构,
更全面的功能,和更方便的扩展性。
不采用附件时,它可以使用模拟量±10V或者脉冲加方向的位置控制信号,通过附件还可以是PWM的脉宽斩波输出。
可以通过104总线与上位机通讯,也可以使用双端口RAM提高总线的通讯速度,脱机独立工作时,还可以使用RS-232或者RS-422串口,USB和以太网通讯。
PMAC2A PC/104 控制器的特点
硬件特点:
40 MHz DSP563xx CPU;
128k x 24 零等待SRAM;
512k x 8 flash memory 用于固件和用户备份;
2k x 8 EEPROM memory 用于参数备份;
最新版本的固件;
RS-232/422 串口,PCI (PC) 总线接口;
4轴通道接口电路,每一个包括:
PMAC2A PC/104控制卡在板模拟量±10V(12位)输出;
PMAC2A PC/104控制卡在板脉冲加方向输出;
PMAC2A PC/104控制卡 3路标准编码器输入;
PMAC2A PC/104控制卡四个标志信号输入(限位,回零,报警等),两个标志信号输出(使能等);
通用I/O,可扩展I/O;
高精度时钟+/-100 ppm;
PID/馅波/前馈伺服算法。
软件特点:
运动轨迹规划
PMAC2A PC/104控制卡支持S曲线加减速的直线插补;
PMAC2A PC/104控制卡支持S曲线加减速的圆弧插补;
PMAC2A PC/104控制卡点到点快速运动;
PMAC2A PC/104控制卡三次样条插补模式spline;
PMAC2A PC/104控制卡三次隐式样条插补Hermite-spline (PVT);
PMAC2A PC/104控制卡自动硬件捕捉/触发功能;
PMAC2A PC/104控制卡交互式手动运动;
PMAC2A PC/104控制卡可选择的运动提前预算lookahead。
伺服特点
PMAC2A PC/104控制卡独立的数字PID反馈滤波;
PMAC2A PC/104控制卡速度前馈,加速度前馈,摩擦力前馈;
PMAC2A PC/104控制卡 2路陷波滤波器;
PMAC2A PC/104控制卡 PID参数可随时任意改变;
PMAC2A PC/104控制卡可编程的极限输入,输出;
PMAC2A PC/104控制卡可选择的多级点伺服算法。
换相特色
PMAC2A PC/104控制卡交流伺服电机的正弦换相
PMAC2A PC/104控制卡交流感应电机的矢量控制
PMAC2A PC/104控制卡数字电流环(使用PWM输出时)(只适用PMAC2) 补偿特色
PMAC2A PC/104控制卡位置补偿列表(1D & 2D);
PMAC2A PC/104控制卡力矩补偿列表;
PMAC2A PC/104控制卡反向间隙补偿;
PMAC2A PC/104控制卡刀具半径补偿。
安全特色
PMAC2A PC/104控制卡硬件的和软件的行程极限;
PMAC2A PC/104控制卡放大器使能/报警交换信号;
PMAC2A PC/104控制卡跟随误差警告极限;
PMAC2A PC/104控制卡整合电流极限;
PMAC2A PC/104控制卡编码器计数损失报警(某些版本);
PMAC2A PC/104控制卡 Watchdog 报警计时器;
PMAC2A PC/104控制卡程序和通信校验。
计算特色
PMAC2A PC/104控制卡实时多任务系统;
PMAC2A PC/104控制卡 48位浮点数编程;
PMAC2A PC/104控制卡三角函数和超越函数;
PMAC2A PC/104控制卡自动匹配不同的变量类型。
可以使用的反馈形式
PMAC2A PC/104控制卡数字积分编码器;
PMAC2A PC/104控制卡正弦编码器;
PMAC2A PC/104控制卡旋转变压器;
PMAC2A PC/104控制卡电位计;
PMAC2A PC/104控制卡 LVDTs,RVDTs;
PMAC2A PC/104控制卡并行数字编码器;
PMAC2A PC/104控制卡 MLDTs;
PMAC2A PC/104控制卡串行编码器(例如:SSI)。
笛卡儿坐标系或者主/从特色
PMAC2A PC/104控制卡用户自定义的笛卡儿坐标系;
PMAC2A PC/104控制卡可分离运行程序的坐标系;
PMAC2A PC/104控制卡支持多个电机的坐标系;
PMAC2A PC/104控制卡轴空间的转化(例如:坐标系偏置,旋转,镜像);PMAC2A PC/104控制卡电子齿轮(不是编程必须的);
PMAC2A PC/104控制卡电子凸轮(需要编程支持)。
运动程序特色
PMAC2A PC/104控制卡高级程序语言;
PMAC2A PC/104控制卡自动按顺序执行运动;
PMAC2A PC/104控制卡使用用户工程单位编程;
PMAC2A PC/104控制卡运动的值可以是公式,也可以是常量;
PMAC2A PC/104控制卡自动匹配坐标系里的各轴,
PMAC2A PC/104控制卡支持G代码,和代码扩展。
PLC程序特色
PMAC2A PC/104控制卡与运动程序异步;
PMAC2A PC/104控制卡象硬件PLC一样控制I/O;
PMAC2A PC/104控制卡脱机运行时,作为支持平台;
PMAC2A PC/104控制卡安全和状态监视;
PMAC2A PC/104控制卡伺服比例行程安排;
PMAC2A PC/104控制卡数据报告功能;
PMAC2A PC/104控制卡可使用控制器的全部寄存器。
PMAC2A PC/104 控制器选项及附件
选项
处理器和固件选项
OPT-10 指定固件版本
OPT-5AF 默认的CPU配置,40 MHz DSP563xx CPU
OPT-5CF 80 MHz DSP563xx CPU
OPT-5EF 160 MHz DSP563xx CPU
OPT-6 扩展伺服算法
OPT-6L lookahead功能
在板选项
OPT-2A 104总线
OPT-8A 高精度时钟(+/-15ppm)
OPT-12 在板2通道12位A/D转化
附件
轴端子板
ACC-8ES 模拟量输出接口板
ACC-8FS PWM输出接口板
ACC-8TS 附件扩展接口板
反馈接口板
ACC-1P 4 通道轴扩展接口板,I/O扩展接口板
ACC-28B 4 通道模拟到数字转换板(高精度)
数字I/O接口板
ACC-1P 4 通道轴扩展接口板,I/O扩展接口板
ACC-2P I/O扩展接口板,通讯扩展接口板
ACC-34AA 32输入/32输出隔离串行I/O扩展板
ACC-34B 32输入/32输出隔离串行I/O扩展板(需要Opto-22?或兼容产品)
ACC-36P 16通道12位模拟到数字输入板
ACC-65ETH TCP/IP模块IO
ACC-76 SNAP I/O 形式,32输入/32输出(需要Opto-22?或兼容产品)
ACC-77 SNAP I/O 形式,64输入(需要Opto-22?或兼容产品)
伺服接口板
ACC-51S x4096高分辨率正弦编码器细分板
ACC-70P Tamagawa 编码器接口板
通讯接口板
ACC-26A 串口通讯隔离转换板
电源支持
ACC-2A 电源,+/-15V 0.4 A & +5V HBAA-40W
ACC-2B 电源,+/-15V (0.8 A) & +5V HBAA-40W
PC104计算机
ACC-PC104 PC104计算机
接口电缆
ACC-21F Cable 50-pin card-edge to 34-pin IDC header for PMAC (1) JOPT connector 显示附件
ACC-12A 40x2 LCD 背光显示
ACC-12C1 真空荧光管显示
ACC-12D 显示转换
如图所示:PMAC2A PC/104基板+ACC-1P背板+ACC-2P背板
PMAC2A PC/104 控制器软件
PMAC HMI Designer Software
Human-Machine Interface (HMI) 人机界面软件,定制操作界面
PTalk OCX Pro
界面友好的使用PComm32Pro的ActiveX 控件工具
PMAC Panel Pro
PMAC 在LabView环境下的动态链接库。