动作经济原则概要
动作经济十二原则
动作经济十二原则
原则一:消除不必要的工作
原则二:减少眼睛的运动
原则三:组合两种以上的动作
原则四:材料或工具放在前面近处
原则五:材料或工具的放置要适合作业顺序
原则六:放置方式应保证易于拿起与放回
原则七:利用不需费用的动力或重力
原则八:尽量使用两只手
原则九:避免之子型的动作或急剧的方向转换Байду номын сангаас
原则十:在最短距离进行动作
原则十一:使工具成为一体
原则十二:保证过先入先出(FIFO: First In First Out).
动作经济四大基本原则

动作经济四大基本原则昨日周末与各位分享了动作优化的22条军规,所有的优化规则都是我们工作中的常识,只是有时我们将这些规则渐渐淡忘,将现场的工作认为是合情合理的,而不去进行改善;如果说昨日所分享的优化的22条军规,内容条数过多的话,那么我们今天将他进行归纳总结成以下动作经济的四项基本原则:1、两手同时动作;2、动作单元力求减少;3、动作距离力求缩短;4、舒适的工作;下面让我们一同来探讨这四项基本原则:动作经济四项基本原则第一项:两手同时使用;两手同时使用的目的在于避免单手负荷过多,而另外一只手却空闲浪费;工作范围的设计以及零件的摆置影响左右手工作量之关系很多,通常右手负担较难之工作,而左手则进行简单操作;两手同时使用其程度上的难易需要看各操作的性质不同而坐不同的变更;当两手同时使用的时候,如果让两只手动作反向对称,在感觉上会更加和谐更加容易,并且能够配合人体工学,使疲劳度减轻;动作经济四项基本原则第二项:动作单元力求减少;欲求动作单元减少,当然首先要删除不必要的动作,并设法将两种或两种以上的动素结合而得到同一目的;同样道理,两种以上的工具也要想办法合并;删除或省略某一动素要极为谨慎,务必确保需要删除的动素对整个制造程序的贡献以及所占的地位都得到了适当的衡量评判;其次,材料、零件以及相应工具要按照操作顺序排列在合适的位置上面,并且工具一定要处于可以随时工作的状态,尤其是工具一定不可以因为寻找抓取而浪费时间以及注意力;装配使用的材料与零件要利用容器在存放,而且存放的容器设计要符合以下三点:1、容器不可以大于必要的尺寸,避免占用空间;2、容器地步要有适当的倾斜,使零件可以通过重力坠落到工作者的手边;3、容器的开口处不可以过小,致使零件在下坠过程中,因为相互碰撞而堵塞;动作经济四项基本原则第三项:动作距离尽量缩短;为了要缩短动作距离,首先要考量身体各部位的最小使用范围。
在IE学科中,将人在工作的时候的动作分为五个级别:1、手指动作;2、手指以及手腕动作;3、手指、手腕以及前臂动作;(1)肋处为移动的轴心(2)肋处手臂旋转的转轴(3)扭转移动4、手指、手腕、手臂及上臂动作;(1)肩部为移动的轴心(2)扭转移动5、手指、手腕、前臂、上臂、及身体的动作(1)躯干动作——臀部为移动的轴心;(2)躯干动作——膝盖为移动的轴心;(3)腿部动作(a)前进或后退(b)旁移(4)膝部动作(5)足部动作(6)联合动作显然等级越高,所需要消耗的时间和体力就会越大;因此我们在工作设计中一定要尽量使用比较低级别的动作,来缩短动作的距离;其次要注意我们两手的工作作业范围;装配的零件与工具要放置在工作范围内,并且要接近装配区域;缩短动作的距离也可以使用零件或者制成品本身的重量,使其坠送到装配区域或者制成品的箱子内;动作经济四项基本原则第四项:舒适的工作;动作分析最重要的目的就在于减轻工作人员的疲劳感;而且疲劳分为生理疲劳和精神疲劳两种;上面所提的三个基本动作经济原则,都比较偏重与强调生理疲劳的减轻与工作时间的缩短;而第四项原则,则比较偏重与精神疲劳的减轻;动作本身的困难性引起的踌躇心理最容易引起工人精神疲劳;如果希望做到舒适的工作,就一定要避免因困难动作而造成的工作人员精神疲劳;举例说明如下:1、尽量使用日常生活已经熟悉的动作,流利而且自然;2、尽量采用曲线圆滑的动作;3、利用惯性,重力和自然的力量;4、工作地点应当配合适当的高度,而且决定高度的时候要考量到以下因素:(1)配合操作周期;(2)配合操作员工的身体特点;(3)需要看到的距离;(4)需要使用力量的程度;(5)身体的平衡性;动作的改善,必须要从排除下列工作开始:1、需要用力气的工作,需要用手、脚或者全身用力才能完成的工作或者向膝盖下方伸手以及蹲下拿起物品的动作,因为这些工作会引起肌肉的疲劳;2、不自然的姿势,例如蹲在地上做事,或弯着腰工作等,这些不自然的姿势也会引起肌肉的疲劳;3、需要注意力的工作,例如必须仔细对准的工作或必须谨慎挑选的工作等,这些工作会是作业人员精神疲劳;4、厌恶的工作,例如噪音很大、空气污染、机器容易故障的工作;以上四点,都是改善的重点,只要稍微留意,就会发现很多工作都是可以大大改善的;连续几天3篇文章在讲解IE的一些改善手法,是希望大家能够在工作中先通过微改善来树立精益的信心,由小变大,让精益的工作能够丰富您的人生!明天文章预告:QC七大手法欢迎大家关注精益生产管理助手,希望我们的分享能够激起您的共鸣,为精益进上一份力量,让我们在精益的道路上再接再厉,努力前行!如果您也喜欢精益,请点击右上角关注我们,并与您的朋友一同分享我们的文章;每天一篇文章,让我们伴随精益一同成长!。
5、动作经济原则
≪工程の改善≫
■工程分析
IE ・P-Q分析
手 ・工程分析
法
・工程経路分析 ・动线图
≪作業の改善≫
■作業分析 ■稼動分析
・M-M分析 ・线平衡分析
・抽样法 ・連続観測法
・運搬分析
・作業者工程分析
≪動作の改善≫ ■動作分析
・動作経済の原則 ・時間分析 ・標準時間 ・PTS法 ・VTR分析 ・両手作業分析 等
何谓“工作”?
■工作=随同时间、“价值”也逐渐增加 ■一天的劳动时间=工作+动作
工作(价值)
■卖得掉(产生利润)
动作((损耗)
• 变形 • 变色 • 变质 • 组装
人・物 设备・资本
信息
必须但无附加价值作业
浪费
・等待 ・搬运 ・换手拿工具、部件 ・部件的堆积﹑寻找 ・不合格品的修复
动作经济原则
前言
我们将令工厂的面貌焕然一新! 首先改变意识~然后改变工厂 ! 不要再维持现状,不要固步自封! 勇敢向前迈进吧! 『虽然适这个技术很先进,但是不适合小天鹅』 『无论方案A还是方案B,都不太适合小天鹅』
・・・・・像这种言论一定要杜绝! 今后我们应该朝着『无论多么艰难,
我都绝不放弃!』的方向迈进!
明确动作优劣的 原因,可判断何
为优良动作
拥有能判断良好的动作 方法、完善的作业布置、 优良的夹具工具的思考
力
动作经济的4原则
4原则
具体的着眼点
1、减少动作的次数
2、双手同时动作 3、缩短动作距离 4、使动作变得轻松
﹡消除寻找、选择的动作 ﹡消除保持、空手等待 ﹡消除抓住修正、换手的动作 ﹡消除需要考虑、判断、注意的动作 ﹡双手应在运动过程中完成加工 ﹡减少单手持有、空手 ﹡两手应同时取放 ﹡两手就在同时在以对称相反的方向移动 ﹡在正常的作业区域内作业 ﹡动作以手指、手腕来完成
动作经济原则

动作经济原则1. 简介动作经济原则是一种经济学原理,主张通过采取积极的行动来实现个人和社会的经济目标。
这一原则强调个人的主动性和创造力,在经济决策中注重积极的行动和主动的参与。
动作经济原则认为,积极主动的行动能够创造更多的机会和财富,而单纯的观望和被动等待则往往会限制个人的经济发展。
2. 意义与原理动作经济原则基于以下几个原理:2.1. 机会成本动作经济原则认识到经济决策的机会成本。
机会成本是指在做出某种选择时所放弃的所有其他选择的收益。
按照动作经济原则,我们应该在评估各种选择的时候考虑到机会成本,避免因迟疑不决而错失机会。
2.2. 创造机会和财富动作经济原则认为,通过积极主动的行动可以创造更多的机会和财富。
只有采取行动,个人才能真正实现自己的经济目标。
而如果只是坐等机会的到来,可能会错失许多潜在的机会。
2.3. 学习和成长动作经济原则鼓励个人通过行动来学习和成长。
通过积极参与和实践,个人可以积累经验、发现问题并找到解决方案。
只有通过不断行动的过程,个人才能不断进步和提升。
2.4. 风险与回报动作经济原则认为,风险与回报是不可分割的。
在经济决策中,积极主动的行动可能会带来更大的风险,但也有可能带来更高的回报。
通过合理评估风险,并采取相应的行动,个人能够更好地控制其经济命运。
3. 实践动作经济原则的方法3.1. 设定目标首先,根据自身的经济目标,明确自己希望达到的成果和收益。
清晰的目标能够帮助个人更好地规划和行动。
3.2. 制定行动计划根据目标,制定具体的行动计划。
行动计划应该包括明确的时间表和具体的行动步骤,以便个人能够有条不紊地对目标进行实现。
3.3. 克服拖延症拖延症是影响行动的主要障碍之一。
为了克服拖延症,个人可以采取一些策略,如设定小目标、与他人分享目标、创造适合自己的工作环境等。
3.4. 学会适应在经济决策中,往往会出现意料之外的情况和变化。
个人需要学会适应变化,并根据变化做出相应的调整。
动作经济的16项原则
2、对称反向的原则:双手或双臂运动的动作如能保持反向对 称,双手的运动就会取得平衡,动作也会变得更有节奏。
3、排除合并的原则:如:电焊面罩、零件定量计数、滚筒印 刷等
4、降低动作等级的原则:动作等级越低越不容易疲劳
13、适当位置的原则:工作台或机器上将工具一线排开放 置使用,这是不正确的方式,因为工作人员在工作台上的动 作范围及路径是呈圆弧的状态而非直线的关态。
14、安全可靠的原则:应确保作业现场的一应设施、材料、 布置、作业方法不会存在安全隐患。
15、照明通风的原则:作业场所的灯光应保持适当的亮度 和光照角度,这样,作业者的眼睛不容易感到疲倦,作业的 准确度也能有所保证。
改变次序
3
重排 改用其他方法
改用别的东西
①把检查工程移到前面 ②用台车搬运代替徒手搬运 ③更换材料
连接更合理
4
简化 使之更简单
去除多余动作
①改变布置,使作业环境更顺畅 ②使机器操作更简单 ③使零件标准化,减少材料种类。
5、减少动作限制的原则:如摆放零件的容器容易倾倒,则取 零件的动作效率必大受影响。
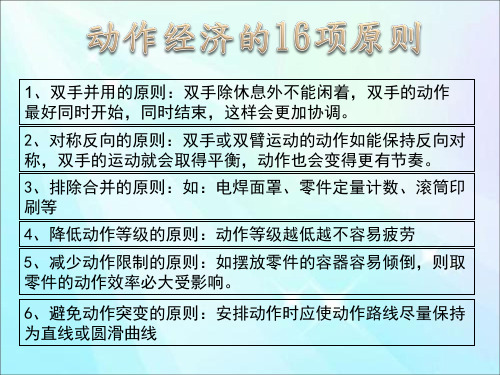
6、避免动作突变的原则:安排动作时应使动作路线尽量保持 为直线或圆滑曲线
7、保持轻松节奏的原则:动作也必须保持轻松的节奏,动辄 必须停下来进行判断的作业,会影响作业速度。
8、利用惯性的原则:如果能利用惯性、重力、弹力等进行动 作,就会提高动作效率。
16、高度适当的原则:作业场所的工作台面、桌椅的高度 应该处于适当的高度,让作业者处于舒适安稳的状态下进行 作业。
动作改善四原则
序号 改善原则
目的
动作经济性原则

动作经济性原则
动作经济原则定义
1. 生产三要素:人、机器和物料
2. 动作经济原则的理念:为了以最低限度的疲劳获取最高的效率,寻求最合理的动作作业时应遵循的原则。
根据这些原则,任何人都能检查作业动作是否合理。
动作经济的四条基本原则
1. 减少动作数量
2. 双手同时作业;
3. 缩短动作的距离;
4. 轻松作业。
动作经济原则的作用
1. 发现作业动作中不满足动作经济原则之处,取消动作中存在的不合理、不稳定和无用的动作;
2. 取消作业中容易造成疲劳和失误的因素,使操作者保持良好的状态,有节奏的进行作业;
3. 掌握动作经济原则,提高动作意识、问题意识和改善意识,经常构思和运用高效的作业分析。
基本原则一的应用:减少动作数
1. 关于动作方法
2. 关于作业现场布置
3. 关于工夹具与机器
基本原则二的应用:双手同时进行动作
1. 关于动作方法
2. 关于作业现场布置
3. 关于工夹具与机器
基本原则三的应用:缩短动作距离
1. 关于动作方法
2. 关于作业现场布置
3. 关于工夹具与机器
基本原则四的应用:轻快动作
1. 关于动作方法
2. 关于作业现场布置
3. 关于工夹具与机器。
动作经济四原则

动作经济四原则引言动作经济是指在日常生活中,通过优化决策和行为来达到经济效益最大化的一种方法。
动作经济的核心在于理解并应用经济学原理来指导我们的行动。
在本文中,我们将介绍动作经济的四个基本原则,帮助你在日常生活中做出更有效的决策,以实现经济效益的最大化。
原则一:机会成本机会成本是指我们所放弃的最好的替代选择。
在做决策时,我们需要考虑放弃某个选择会带来的机会成本。
采取动作经济的角度,我们应该比较不同选择的机会成本,并选择机会成本最低的选项。
举个例子,假设你计划购买一台新手机。
你面临的选择是购买一台价格较高但功能齐全的手机,或购买一台价格较低但功能较少的手机。
在这种情况下,你需要权衡价格和功能之间的关系,并考虑到购买价格较低手机的机会成本。
如果你更注重价格,可以选择购买价格较低但功能较少的手机,这样你可以将剩下的钱用于其他方面。
原则二:边际效益递减边际效益递减原则指的是随着我们增加某种资源或行为的量,其每单位增加所带来的效益逐渐减少。
这里的边际效益指的是当我们增加一单位资源或行为时所获得的额外收益。
举个例子,假设你是一家餐馆的经营者,你拥有20名员工。
你决定再雇佣一名员工来提高服务质量。
最初增加一名员工可能会带来明显的效益,例如减少客户等待时间、提高烹饪效率等。
然而,当你雇佣更多员工时,每多雇佣一人所带来的效益就会递减。
因此,在雇佣新员工时,你需要权衡雇佣该员工所带来的收益与成本。
原则三:边际成本边际成本是指增加一单位某种资源或行为所付出的成本。
在做决策时,我们需要考虑边际成本是否超过边际效益。
如果边际成本高于边际效益,那么该决策可能并不划算。
继续上面的例子,假设你决定再雇佣一名员工。
你需要考虑雇佣该员工的成本,包括薪水、培训费用等,然后再与雇佣该员工所带来的收益进行比较。
如果雇佣员工的成本高于其带来的收益,那么这个决策就不划算。
原则四:激励激励是指通过奖励或惩罚来影响人们的行为。
在动作经济中,我们可以利用激励来改变自己或他人的行为,以实现经济效益的最大化。
动作经济原则的四项基本原则

动作经济原则的四项基本原则引言动作经济原则是一套用于经济学研究和政策制定的基本原则,其目的是通过理性行动来实现经济发展和效益最大化。
本文将就动作经济原则的四项基本原则进行探讨,并阐述其在实际应用中的重要性和局限性。
一、激励原则1.1 激励机制的作用激励机制是激发个体主动追求利益最大化的重要手段。
经济主体在作出决策时,通常会考虑到个人目标和利益,激励机制通过奖励和惩罚来引导个体行为,使其符合整体经济的利益。
1.2 契约理论的应用契约理论是研究合同和决策的一种方法,通过明确个体之间的权利和义务,为经济行为提供基本框架。
通过合理设计契约,可以激发个体最大的工作动力,提高整体经济效益。
1.3 激励相容性的要求激励相容性是指经济体制和政策在激励个体追求自身利益的同时,也能够促进整体经济的发展和效益最大化。
实现激励相容性需要合理设计利益分配和监管机制,避免利益冲突和资源的浪费。
二、机会成本原则2.1 机会成本的概念机会成本是指由于选择某种决策而放弃的最优替代选择的成本。
它反映了资源的稀缺性和经济决策的代价,是作出合理经济决策的基本依据。
2.2 机会成本与资源分配在资源有限的情况下,个体或集体必须面对不同选择,机会成本的概念能帮助我们更好地理解资源分配的机制和效率。
通过比较机会成本,可以找到最佳的资源配置方式,实现经济效益最大化。
2.3 机会成本与生产要素配置机会成本的概念也适用于生产要素的配置。
在生产过程中,不同生产要素之间的选择和组合会产生机会成本,通过比较机会成本可以确定最佳的生产要素配置方案,提高生产效率。
三、边际分析原则3.1 边际收益与边际成本边际收益是指增加一单位产出或消费所带来的额外收益,边际成本是指增加一单位产出或消费所需要付出的额外成本。
边际分析原则通过比较边际收益和边际成本,来决策是否进行某项活动。
3.2 最优决策的边际原则最优决策是指在已知条件下,使得边际收益等于边际成本的决策。
经济主体应该继续进行某项活动,直到边际收益等于边际成本时停止,以实现效益最大化。
动作经济原则
动作经济原则动作经济原则(Principles of Action Economics)是指在经济领域中,人们追求经济有效的行动和决策所遵循的原则。
这些原则可以帮助个人、企业和政府在资源有限和目标多样的情况下做出明智的选择。
下面是20条动作经济原则:1.选择最佳决策:在每个决策中,选择能最好达到目标和满足需求的行动方案。
2.考虑边际效益:通过比较额外行动带来的效益和成本,做出决策是否值得。
3.考虑机会成本:做出项决策时,要考虑放弃其他可能选择所带来的损失。
4.理性决策:在做出决策时,要用理性思维和基于事实的分析来评估选项。
5.适应性决策:在变化的环境中,根据情境调整和修改决策,以适应新的要求。
6.综合考虑:在决策时,综合考虑各种因素,包括经济、社会和环境等。
7.考虑长期影响:在做出决策时,要考虑它对未来的影响而不仅仅是眼前的结果。
8.推动变革:通过改变现有的制度和政策,推动经济的发展和改进。
9.最优资源配置:根据资源的稀缺性和需求的优先级,合理分配和利用资源。
10.鼓励创新:通过提供激励和支持,鼓励创新和新兴产业的发展。
11.促进竞争:通过开放市场和保护消费者权益,促进竞争和选择的多样性。
12.支持自由贸易:通过降低贸易壁垒和加强国际合作,支持自由贸易和经济共赢。
13.保护环境:在经济发展中,要采取措施保护环境,避免资源的过度开采和污染。
14.提高教育和技能:通过投资教育和培训,提高人力资源的素质和竞争力。
15.平等机会:提供平等的机会和资源分配,促进社会的公平和包容性。
16.保护消费者权益:加强消费者权益的保护,提高消费者的福利和满意度。
17.强调可持续发展:在经济发展中,要考虑社会、经济和环境的可持续性。
18.推动公共投资:通过增加公共投资,促进经济发展和基础设施建设。
19.鼓励合作和协作:通过加强国际合作和跨领域合作,解决共同面临的挑战。
20.持续改进:在经济活动中,要不断完善和改进,以适应变化的需求和挑战。
动作经济原则PPT

05
动作经济原则的未来发展
新技术的应用
自动化和机器人技术
随着机器人技术的不断进步,越来越多的重复性、危险性 任务将由机器人完成,提高生产效率并降低工伤风险。
人工智能
人工智能在数据分析、预测和优化等方面的应用将进一步 增强,帮助企业更好地理解客户需求,优化生产流程。
物联网和传感器技术
物联网和传感器技术的应用将使企业更精确地掌握生产过 程中的实时数据,实现更精细化的管理。
详细描述
针对特定工作场景,设计和改进工具可以显著提高工作效率。例如,在物流分拣环节,改进的分拣工 具能够快速准确地完成物品的分拣和分类,减少了人工操作的错误率,提高了整体工作效率。
案例四:培训计划实施
总结词
培训计划,提升员工技能
详细描述
通过制定和实施培训计划,可以提高员工的技能水平和工作效率。针对不同岗位和职能的员工,制定个性化的培 训计划,包括技能培训、安全培训、管理培训等,帮助员工提升自身能力,更好地适应工作需求,提高工作效率。
减少不必要的动作
01
02
03
避免重复性工作
通过合理的工作流程设计, 减少重复性工作,提高工 作效率。
消除无效动作
识别并消除工作流程中的 无效动作,降低工作强度。
自动化和简化
利用技术手段,如自动化 工具和软件,简化工作流 程,减少人工操作。
优化工作流程
流程分析和改进
定期对工作流程进行分析 和评估,发现潜在的改进 点,提高工作效率。
减少疲劳和损伤。
工作站布局优化
工作站布局规划
合理规划工作站布局,使作业流程更加顺畅,减少重复和不必要 的动作。
作业区域划分
根据作业需求,合理划分作业区域,提高工作效率和作业安全。
精选IE基础培训动作经济原则lrx

7-33,脚踏板B,钳口A张开,弹簧C,连杆D,如果需要加持力大的话,可以使用压缩空气的活塞来驱动虎钳的钳口,而压缩空气使用脚踏阀来控制。7-34,电烙铁A,踏板B,放开B的同时压缩空气管道上的阀门C打开,放出空气吹冷焊接点。冷压打字头,原来用手,后改用气压机,提高效率。
冷压压制工序的整顿案例:
11
实例一:电灯开关,旧式需要拨动,新式只需按,现在有些单元楼里是触摸的。
实例二:办公桌设计
A)底层抽屉需要弯腰。B)做资料柜不需要弯腰。C)领导打办公桌。拉开距离,威严。D)使用,取用东西方便。
第三条原则:尽可能利用物体动能;曲线运动较方向突变的直线运动为佳;动作应尽可能有节奏。
二:动作经济原则介绍
动作经济原则为基尔布雷斯夫妇所创,经很多科学家完善,后由美国巴恩斯将其总结为三大类,22条。它适用于人的全部作业,是动作改善的基本方向原则。这里是对肢体使用、作业配置、机械设计三方面进行总结说明。
动作经济原则
一、关于人体利用(1-8条)双手应同时开始,并同时完成动作。除规定的休息时间外,双床不应同时空闲。双手动作应该对称,反向并且同时进行。收的动作应用最低的等级而能得到满意的结果。物体的动量应尽可能的利用,但是需要肌力制止时则应将其减至最低程度。连续的曲线运动,比方向突变的直线运动为佳。弹道式的运动较受限制或受控制的运动轻快自如。动作应该尽可能的应用轻快的自然节奏,因节奏能使动作流利及自发。
改善后每小时装配260套,产量提高了30%。
三、动作经济型原则检查表
9、静夜四无邻,荒居旧业贫。。10、雨中黄叶树,灯下白头人。。11、以我独沈久,愧君相见频。。12、故人江海别,几度隔山川。。13、乍见翻疑梦,相悲各问年。。14、他乡生白发,旧国见青山。。15、比不了得就不比,得不到的就不要。。。16、行动出成果,工作出财富。。17、做前,能够环视四周;做时,你只能或者最好沿着以脚为起点的射线向前。。9、没有失败,只有暂时停止成功!。10、很多事情努力了未必有结果,但是不努力却什么改变也没有。。11、成功就是日复一日那一点点小小努力的积累。。12、世间成事,不求其绝对圆满,留一份不足,可得无限完美。。13、不知香积寺,数里入云峰。。14、意志坚强的人能把世界放在手中像泥块一样任意揉捏。15、楚塞三湘接,荆门九派通。。。16、少年十五二十时,步行夺得胡马骑。。17、空山新雨后,天气晚来秋。。9、杨柳散和风,青山澹吾虑。。10、阅读一切好书如同和过去最杰出的人谈话。11、越是没有本领的就越加自命不凡。12、越是无能的人,越喜欢挑剔别人的错儿。13、知人者智,自知者明。胜人者有力,自胜者强。14、意志坚强的人能把世界放在手中像泥块一样任意揉捏。15、最具挑战性的挑战莫过于提升自我。。16、业余生活要有意义,不要越轨。17、一个人即使已登上顶峰,也仍要自强不息。
动作经济原则

动作经济原则所谓动作经济原则,是指实现动作经济与减轻疲劳的原则,用以改善工作方法。
动作经济原则是方法研究的重要工具。
它与程序分析、作业分析不同,利用动作经济原则作为方法改进的工具,其重点不是放在改变整个制造程序的计划、作业标准的内容,也不是更换不良的机器设备和改变生产进度等问题,而是在现有条件基本不变的条件下,科学地使用人的双手及人身的其他部位,以最少的体力、精力的消耗,获得尽可能多的产品,提高动作的效果,提高工人的工作效率,并使他们感到身心舒适愉快。
动作经济原则的内容包括关于人体的利用、操作场所的布置、工具和设备的设计等三个方面原则。
一.人体的利用原则1.双手应同时开始完成其动作。
2.除休息时间外,双手不应同时闲置。
3.双臂的动作应对称,动作反向并同时进行。
上述三项原则是手部动作的重要原则,即充分利用人的双手。
但是人们在习惯上,通常是一只手握持工作物,另一只手进行操作,实际上只是一只手在工作。
虽然人的双手效率不同,在手不如右手效率高,但至少可达到右手效率的80%,浪费操作人心理和生理上的不平衡感,减少身躯有关部位的应力,增进动作效益,则必须采取两手同时作反向对称地进行相似或相同的动作。
4.手的动作应以用最低等级的动作,而可以圆满地完成工作。
动作等级是根据身体各部位必须围绕其活动的枢轴来划分的,如表所示:级动作显然节省人的体力消耗,减少工人的疲劳、动作等级越低,所耗时间越少,使用较低级动作完成工作,可节省操作时间,提高工作效率。
在布置工作地时,如能将所需要的物料都放在容易抓取的范围内,就会使操作者的动作等级达到最低。
5.不管在何处,应使惯性有助于工人,如果必须以体力来消除惯性,则务必设法减少到最低限度。
6.连续的曲线运动,比含有方向突变的直线运动好。
7.弹道运动,比受限制的或受控制的运动更为快速,更为方便和更为准确,根据生理学家的研究,人的手或身体其他部分的运动,是由两组肌肉控制的,一组推向前,一组推向后,两组肌肉互相协调,当前推与拉后的力量相等时,手就停止不动。
工业工程基础之动作经济原则与现场改善

工业工程基础之动作经济原则与现场改善一、动作经济原则在工业工程中,动作经济原则是指通过优化动作的方式,提高生产效率和工作质量的原则。
具体来说,动作经济原则是通过减少不必要的动作、优化动作顺序、改善动作方式等方式来实现的。
1. 减少不必要的动作减少不必要的动作是提高工作效率的关键。
人们在工作中常常会有一些不必要的动作,比如多次重复拿放物品、走动次数多等。
通过观察工作过程,并进行分析,可以找出这些不必要的动作,并采取措施进行改进和优化。
例如,在生产线上,工人在拧紧螺丝时,可以通过优化工作台的设计,将螺丝和螺丝刀一起放置在工人手边,减少工人来回拿取螺丝的动作,从而提高工作效率。
2. 优化动作顺序优化动作顺序是指通过调整工作过程中的动作顺序,使得工作更加高效、流畅。
在分析工作过程时,可以根据动作的复杂程度、频次等因素,合理地安排动作的顺序。
举个例子,假设一个仓库的工作人员需要将货物从货架上取下,然后放到运输车上。
如果工作人员先取货、再放货,反复来回多次,那么工作效率就会很低。
而如果将取货和放货这两个动作安排在一起进行,可以减少走动的次数,提高工作效率。
3. 改善动作方式改善动作方式是指通过调整人体姿势、动作方式等方面来提高工作效率和工作质量。
如果工作人员的姿势不合理或动作方式不当,容易导致身体不适、疲劳和错误操作,影响工作效率和工作质量。
比如,在长时间的坐姿工作中,应该保持正确的坐姿姿势,避免驼背或过度弯腰。
同时,使用适合的工作工具、设备,能够减少不必要的力气消耗,提高工作效率。
二、现场改善现场改善是指在工作现场针对存在的问题进行改进和优化,以提高工作效率、减少浪费和改进工作质量。
1. 现场观察现场观察是进行现场改善的前提和基础。
只有通过观察工作现场,了解问题的具体情况,才能有针对性地进行改进措施。
在进行现场观察时,应该充分利用目测、录像、计时等方法,对工作现场进行全面而系统的观察。
通过观察,可以发现一些潜在的问题和浪费,为后续的改进工作提供有力的依据。
动作经济原则

动作经济原则动作经济四原则:1)减少动作的次数;2)减少动作的距离;3)双手并用;4)保持轻松愉快的作业节奏;一、定义所谓动作经济原则,即在于人在操作作业时,能以最少的劳力在到最大的工作效果的经济法则,对这个法则能好好的学习与使用,在工厂内,我们可在许多地方发现许多不合乎此法则的动作,当然工作效率会低,人员易于疲劳。
动作经济原则二、肢体使用原则1.双手同时开始并同时结束动作单手作业会造成另一只手的空闲及不平衡2.双手的动作应对称反向进行双手在某一方赂单向动作的话,会造成体重心的转移,而维持这种平衡的劳动将带来精神以及肌肉的疲劳。
双手反向对称动作是最省力的作业方式3.身体的动作应以最低等级的动作来进行身体的动作幅度越小越好,动作时间越短越好人体的动作等级以下列次序递减腿的动作→腰的动作→肩的动作→肘的动作→手腕的动作→手指的动作4.动作姿势稳定使作业者能够在身体整体相对稳的情况下更轻松地工作,这样才能提高工作效率5.连续圆滑的曲线动作动作的速度和方向突然改变的话,会打乱工作节奏,同时会消耗大量体力6.利用物体的惯性像使用手捶时我们所感觉的那橛,当尽可能利用手捶的惯性和动量重量时,就会越省力,所以利用物体惯性能节省体力提高效率7.降低动作注意力过程中产生迷惑或需要判断时,动作会有停顿、迟凝降低动作注意力例子:⑴放置螺丝刀的固定位以喇叭形为佳;⑵需要对准及嵌入时,以导向槽及机构装置减少对准的难度;⑶测量时用固定规格及定位等手段,使测量工作减少脑力判断过程;⑷利用声光等进行识别,减少注意力;8.动作应尽可能有节奏,习惯性的节奏有助于提高熟练度改善作业节奏的方法⑴作业速度应适当,以一定的节拍规律进行⑵物品的摆放按工艺顺序放置;⑶缩小手的动作范围,保持手部适当高度;三、作业配置原则1.材料、工装的3定3定是指5s整顿中的物品摆放的基本事项,包括定点、定容、定量三原则2.材料、工装预置在小臂的工作范围内这样人可以以比较低级的动作即小臂、手及手指拿取物品及工具完成工作3.简化材料、工装取放对产品及材料按下工序的取拿原则进行放置,另外对一些细小的、不便取放的零件,如小薄垫征、针型物等以小容器及弹性毯垫等方法使之容易取拿4.物品的移动以水平移动最佳物品的移动应尽量避免垂直向上的移动,这种较高等级的动作使人易间生疲劳及工时的增加另外较重的物品,用水平滚轴的方式进行水平移动5.利用物品自重进行工序间传递和移动物品的取放,废脚料的收集等作业都可以利用物品重力,在斜导槽、导轨平面及圆筒等辅助下进行传递与移动6.作业高度适度以便于操作7.满足作业要求的照明工作场所之光线应适度,通风应良好,温度应适度四、工装夹具的设计原则1.用夹具固定产品及工具以固定用台钳及夹持具等来固定产品及工具,以解放人手从而进行双手作业2.使用专用工具生产线中所用工装应最适合该产品及人工操作的专用工具以提高生产效率3.合并二种工装为一种减少工具的更换麻烦,以减少转拉的工时消耗,提高工作效率。
动作经济16条原则

动作经济16条原则发布时间:2006年10月18日 10时14分1、双手并用原则;单手动作不但是一种浪费,同时也会造成一只手负担过重,动作不平衡。
另外,双手的动作最好同时开始,同时结束,这样会更加协调。
2、对称反向原则;从身体动作的容易度而言,同一动作的轨迹周期性反复是最自然的,双手或双臂运动的动作如能保持反向对称,双手的运动就会取得平衡,动作也会变得更有节奏。
3、排除合并原则;不必要的动作会浪费操作时间,使动作效率下降,应加以排除。
而即使是必要的动作,通过改变动作的顺序、重整操作环境等也可以减少。
4、降低动作等级原则;例如:工人在作同样的作业中用以腰部为中心的动作比走动要经济、以肩部为中心的动作比以腰部为中心的动作经济、以肘部为中心的动作比以肩部为中心的动作经济、以手腕为中心的动作比以肘部为中心的动作经济、以手指为中心的动作比以手腕为中心的动作经济。
也就是说动作越简单越经济、动作等级越低越经济,这就是十六条原则中的第四条,降低动作等级原则。
5、减少动作限制原则在工作现场应尽量创造条件使作业者的动作没有限制,这样在作业时,心理才会处于较为放松的状态。
6、避免动作突变原则动作的过程中,如果有突然改变方向或急剧停止必然使动作节奏发生停顿,动作效率随之降低。
7、保持轻松节奏原则;顺着动作的顺序,把材料和工具摆放在合适的位置,是保持轻松节奏的关健。
8、利用惯性原则;充分的利用惯性、重力、弹力等进行动作,从而减少动作的投入。
9、手脚并用原则;脚的特点是力量大,手的特点是灵巧。
作业中应充分结合起来使用。
10、利用工具原则;工具可以帮助作业者完成人手无法完成的动作,或者使动作难度大为下降。
11、工具万能化原则;万能化工具会大大减少使用多种工具的寻找、取放动作。
12、易于操作原则;使用方便才能提高动作的效率。
13、适当位置原则;工作所需的一应材料、工具、设备等应根据使用的频度、加工的次序,合理进行定位,尽量放在伸手可及的地方。
动作经济四原则原理及应用

4、使动作轻松 动作轻省,可促使作业顺畅,及有规律并可减少疲劳,促进作业安全。
9
四、应用动作经济原则得目得
1、发现作业动作中不满足动作经济原则之处,取消动作中存在得不合理、不稳定与无用得动作;2、取消作业中容易造成疲劳与失误得因素,使操作者保持良好得状态,有节奏得进行作业;3、掌握动作经济原则,提高动作意识、问题意识与改善意识,经常构思与运用高效得作业分析。
7
1、减少动作次数 即消除动作本身或减少动作得次数。考虑减少与取消第2、3类动素通过使用夹具、改变动作顺序等改善措施来缩短动作时间,轻松作业
三、动作经济四原则
2、双手同时进行动作 工具得改善,方法得改善,或零件摆放方法等,想办法使两手能同时使用,或脚也能同时使用。
8
3、缩短动作之距离 伸手、步行、转身、蹲下等之动作时间,均与其移动距离成正比。要缩短其距离,消除浪费。
热压自动出料
作业改善-动作经济原则得应用
21
基本原则4:轻快动作A关于动作方法Ⅰ 使动作不受限制轻松进行Ⅱ利用重力及其她机械、电磁力动作Ⅲ利用惯性力与反冲力动作Ⅳ连续滑道改变运动方向(扣子机滑道)
大家有疑问的,可以询问和交流
可以互相讨论下,但要小声点
作业改善-动作经济原则得应用
12
基本原则1:减少动作数A 动作方法Ⅰ 取消不必要得动作Ⅱ减少眼得动作Ⅲ合并两个以上得动作
作业改善-动作经济原则得应用
B 作业现场布置Ⅰ 把工具物料放在操作者前面固定位置处Ⅱ 把工具、物料放置成便于作业得状态Ⅲ 按作业顺序放置工具物料
作业改善-动作经济原则得应用
17
基本原则2:双手同时进行作业C 关于工夹具与机器Ⅰ 采用固定工具固定需要长时间拿住得目得物Ⅱ采用能够用足进行作业得工具完成简单或者需要力量得作业(喷胶机)Ⅲ设计能双手同时操作得夹具(鞋带机)
动作经济原则
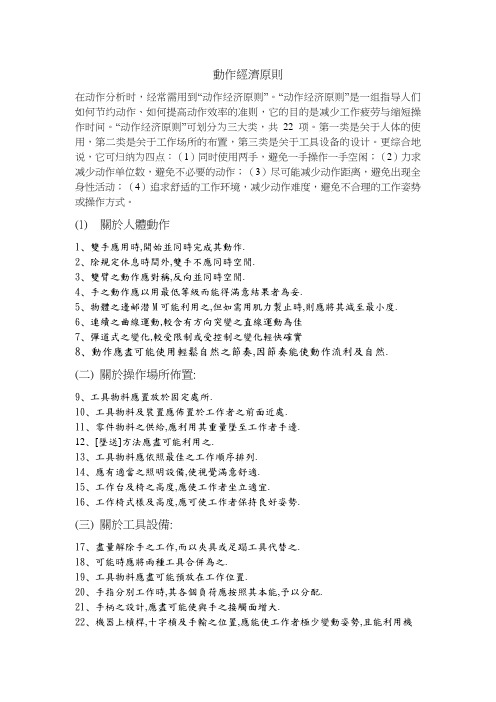
動作經濟原則在动作分析时,经常需用到“动作经济原则”。
“动作经济原则”是一组指导人们如何节约动作、如何提高动作效率的准则,它的目的是减少工作疲劳与缩短操作时间。
“动作经济原则”可划分为三大类,共22项。
第一类是关于人体的使用,第二类是关于工作场所的布置,第三类是关于工具设备的设计。
更综合地说,它可归纳为四点:(1)同时使用两手,避免一手操作一手空闲;(2)力求减少动作单位数,避免不必要的动作;(3)尽可能减少动作距离,避免出现全身性活动;(4)追求舒适的工作环境,减少动作难度,避免不合理的工作姿势或操作方式。
(1)關於人體動作1﹑雙手應用時,開始並同時完成其動作.2﹑除規定休息時間外,雙手不應同時空閒.3﹑雙臂之動作應對稱,反向並同時空閒.4﹑手之動作應以用最低等級而能得滿意結果者為妥.5﹑物體之邉邮潜M可能利用之,但如需用肌力製止時,則應將其減至最小度.6﹑連續之曲線運動,較含有方向突變之直線運動為佳7﹑彈道式之變化,較受限制或受控制之變化輕快確實8﹑動作應盡可能使用輕鬆自然之節奏,因節奏能使動作流利及自然.(二) 關於操作場所佈置:9﹑工具物料應置放於固定處所.10﹑工具物料及裝置應佈置於工作者之前面近處.11﹑零件物料之供給,應利用其重量墜至工作者手邊.12﹑[墜送]方法應盡可能利用之.13﹑工具物料應依照最佳之工作順序排列.14﹑應有適當之照明設備,使視覺滿意舒適.15﹑工作台及椅之高度,應使工作者坐立適宜.16﹑工作椅式樣及高度,應可使工作者保持良好姿勢.(三) 關於工具設備:17﹑盡量解除手之工作,而以夾具或足蹋工具代替之.18﹑可能時應將兩種工具合併為之.19﹑工具物料應盡可能預放在工作位置.20﹑手指分別工作時,其各個負荷應按照其本能,予以分配.21﹑手柄之設計,應盡可能使與手之接觸面增大.22﹑機器上槓桿,十字槓及手輸之位置,應能使工作者極少變動姿勢,且能利用機械之最大能力.動作經濟原則測試題姓名: 工號: 得分:一〃填空(每空5分,共50分):1.動作經濟原則的創始人是2.動作經濟原則一般可分為三類:1. 关于人体的使用2. 关于工作场所的布置3. 关于工具设备的设计3.動作經濟原則的目的是1. 目的是减少工作疲劳 2.缩短操作时间4.動作經濟原則共有22 條5.雙臂動作時,應遵守, , 的原則.二〃選擇題(每題5分,共25分)︰1.當手指分別工作時,其各個負荷分配原則是 ( c )A.按十指生長順序B.按十指的熟練程度C.按十指本能2. 生產線的工具物料應放置於( a )A. 固定位置B.靠近領班的位置C.靠近管理員的位置3. 在生產過程中,動作應該保持的節奏( b )A. 緊張B.輕鬆自然C.極其放鬆4. 在操作工具時,應盡量利用( b c )A. 手B.腳踏C.夾具5. 生產線的照明燈具,應保證亮度( c )A.足夠明亮,以確保看清產品B.柔和,製造浪漫情調C.適度,使得作業者感到舒適三. 問答題(25分):在學習了動作經濟原則之後,作為一線的作業員工,你覺得在今後的工作中,如何來運用動作經濟原則?5W1H測試題姓名: 工號: 得分:一〃填空(每空4分,共42分):1. 5W1H是指, , , , ,2.ECRS是指, , ,3.5W1H的目的是4.對於不必要的動作,我們應該將其5.在安排人員工作時,應遵循的原則二. 問答題:1.請用5W1H分析一下你所做的工作中存在的問題(28分)2.針對上一題中發現的問題,請應用ECRS原則提出您的改善建議(30分)。
动作经济原则
2 对称反向原则
双臂或双手之动作, 应反向对称为之。
3 排除合并原则
排除不必要的动作。 尽量减少动作,或使 二个以上的动作能合 并动作。
4 降低等级原则
动作用最适宜最低次的 身体部位进行;如手的 运动可用手指、手腕、 前膊、上膊、肩五个部 位进行,但是尽可能设 计成只用手指或手腕即 可完成的动作
动作经济原则 Motion Economy
动作经济原则
在于人在操作作业时,能以最少的劳力用到最 大的工作效果的经济法则,对这个法则能好好 的学习与使用,在工厂内,我们可在许多地方 发现许多不合乎此法则的动作,当然工作效率 会低,人员易于疲劳。 动作经济原则刚开始是由动作研究的创始者 GILBRETH所提倡,尔后再经过专家学者的改 GILBRETH所提倡,尔后再经过专家学者的改 进。
关于工作场所的布置原则
1. 2. 3. 4. 5. 6. 7. 定点放置原则 双手可及原则 工序顺序原则 使用容器原则 重力坠送原则 近使用点原则 照明通风原则
1 定点放置原则
工具物料应放置于固定 处所
2 双手可及原则
工具物料及装置,布置 于靠近使用点
3 工艺顺序原则
工具物料应依照最佳工 作顺序而排列
基本原则
1. 动作能量活用原则 2. 动作量节约原则 3. 动作法改善原则
动作能量活用原则
在人的身体各部位,凡是能具有进行动作能力 的部分,不管何部份,都希望全面能活用。
4脚部或左手能操作的事,不使用右手。 4尽量使两手同时作业,也同时结束动作。 4双手不要使其同时静止,手空闲时,须动脑想另 一工作。
关于工具和设备的设计原则
利用工具原则 万能工具原则 易于操作原则 适当位置原则
工作台及坐椅之高度使 工作者坐立适宜
动作经济原则与流程经济原则

动作经济原则与流程经济原则一、动作经济原则1.高效利用资源:企业的资源包括资金、人力、物资等,高效利用这些资源对企业的经营非常重要。
通过对资源的科学配置和合理利用,可以提高资源的效率,从而降低成本、提高竞争力。
2.精简流程:企业的运营过程中往往存在大量的流程和环节,科学地对这些流程和环节进行归纳和整理,可以减少不必要的操作和环节,提高工作效率。
3.优化管理模式:管理模式的合理设计对于提高企业的经济效益也非常关键。
优化管理模式可以通过提升企业的管理水平,优化内部组织结构,提高团队协作效果,从而提高企业的经济效益。
4.系统化的运营:将企业的各项经营活动进行系统化的规划和控制,提升整体运营效率。
通过建立有效的信息系统,实现对企业运营过程的科学监控和管理,能够更好地发现问题、解决问题,提高经济效益。
5.持续改进:动作经济的原则还包括持续改进。
企业应鼓励员工不断总结经验,找出问题,提出改进方案,从而通过不断完善和优化,实现经济效益的进一步提升。
流程经济原则是指企业管理中应以流程为核心,通过优化流程来提高效率、降低成本、提高质量。
流程经济原则主要包括以下几个方面:1.过程优化:企业经营活动中涉及的各个流程,包括生产流程、销售流程、采购流程等,都需要进行优化。
通过深入了解每个流程,找出其中的瓶颈和问题,并进行改进和优化,可以提高整个流程的效率,降低成本。
2.标准化操作:流程经济强调对操作进行标准化。
通过制定和实施操作规程和流程标准,可以提高员工工作的准确性和一致性,并减少人为错误,提高工作效率。
3.流程协同:企业的不同流程之间存在关联,这些流程需要进行协同运作。
通过优化协同机制,提高各个流程之间的衔接和合作,可以提高整个流程的效率。
4.自动化与信息化:流程经济原则鼓励企业进行自动化和信息化的改进。
通过引入自动化设备和信息化系统,可以提高流程的效率和准确性,降低人力成本。
5.持续改进:流程经济原则也强调持续改进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第
——动作经济原则的应用
六
章
一、基本原则1:减少动作数
动
二、基本原则2:双手同时进行动作
作 分
三、基本原则3:缩短动作距离
析
四、基本原则4:轻快动作
第 一、基本原则1:减少动作数
六
章
(一)关于动作方法
动 作
(二)关于作业现场布置
分
析
(三)关于工夹具和机器
第 (一)关于动作方法
六 章
六
章
1、利用便于抓取工具、物料的物料箱
从物料箱中抓取物料时,应仅是简单的伸
动
手和抓取动作,不应需要集中注意力和调节方
作
向。
分 析
实例13:漏斗型物料箱的应用 实例14:用波纹板简化抓取动作
第 六 章 动 作 分 析
第 六 章 动 作 分 析
第 六
2、把两个及以上的工具合并成一个
章
通过把频繁使用的多件工具合并成一件,可
第 六 章 动 作 分 析
第 (三)关于工夹具与机器 六
章
➢要遵循双手同时动作原则,对于工夹具
与机器应考虑以下三个问题:
动
(1)当要长时间拿住目的物时应尽量采
作
用固定工具。
分
(2) 对简单的作业与需要力量的作业,
析
应尽量采用能利用足进行作业的工具。
(3)设计能进行双手同时作业的夹具。
第 1、采用固定工具固定需要长时间拿住的目的
为完成规定的作业,把人体的活动部位限
动
制到最小的范围,工作效率最高,同时也不容
作
易疲劳。
分
析
例图:人体最佳动作顺序
第 六 章 动 作 分 析
第 2、用最短的距离进行动作
六
章
动作的距离几乎都由作业现场布置 所决定。
章
或需要力量的作业
➢对不用手也能完成的简单作业,应尽量用足
动
完成,以便空出双手进行复杂作业。
作 分
➢对需要力量的作业,用足比用手操作更有
析
效,还能减轻手的疲劳。
例:两种用足进行操作的装置
第 六 章 动 作 分 析
第 3、设计能双手同时操作的夹具
六
章
按能同时使用双手布置作业区域,设计不发 生单手空手等待的夹具时,有必要从操作的角度,
动
实例7:指定工具、物料的放置位置
作
实例8:固定工具与原料箱
分 析
实例9:把标签放置台改放在操作者前面的固定 位置上
第 六 章 动 作 分 析
第 六 章 动 作 分 析
第 六 章 动 作 分 析
第
六
2、把工具、物料放置成便于作业的状态
章 实例10:利用夹钳放置筒取消“改变夹钳
动
握持方式”的动作
以减少用手操作使用工具的次数和寻找动作。
动
实例15:经常使用工具的合并
作 分
实例16:相同形状工具的合并
析
实例17:合并完成同一作业所必要的工具
实例18:合并万用表的测头
第 六 章 动 作 分 析
第 六
3、利用快动夹紧机构
章
把工件夹紧在夹具中的作业,属于机械加工工
动
序 的辅助作业,夹紧应操作简单,还要满足夹 紧要求。
1、取消不必要的动作
动
通过动素分析,尽量减少第2类第3类动作 数。
作
分
实例1:通过固定电烙铁减少动作数
析
实例2:用定量容器取消计数动作
第 六 章 动 作 分 析
第 六 章 动 作 分 析
第 六
2、减少眼的活动
章
要尽量将定神直接观看改成大致观看,
并减少在观看过程中的人体活动。
动
作
实例3:利用反射镜减少眼的移动角度
分
实例4:用透明有机玻璃观看窗口减少眼
析
的活动
第 六 章 动 作 分 析
第 六 章 动 作 分 析
第
六 章
3、合并两个及以上的动作
动
实例5:合并两个印章减少盖印动作
作 分
实例6:用双管注射器减少涂覆树脂动作
析
第 六 章 动 作 分 析
第 六 章 动 作 分 析
第 (二)关于作业现场布置 六 章 1、工具材料放在操作者前面的固定位置处
作 分
实例11:通过改变作业现场的布置取消
析
“变换工件方向”的动作
第 六 章 动 作 分 析
第 六 章 动 作 分 析
第
六
章
3、按作业顺序放置工具物料
动 作
把作业顺序放置工具物料,可以
减少寻找、选择等动作,轻快地进行 作业。
分
析
实例12:按便于作业的顺序布置工具
第 六 章 动 作 分 析
第 (三)关于工夹具与机器
六物
章
用一只手代替虎钳之类的固定工具拿住目的物,
将降低作业效率。此时应考虑通过使用固定工具,
动 作
解放拿住目的物的手,以便使用双手同时作业。这 样,既能稳定产品质量,也便于作业,减轻操作者 的疲劳。
分
析
实例23:在拧紧螺钉作业中使用固定工具
第 六 章 动 作 分 析
第 2、采用能用足进行作业的工具完成简单 六的
实例21:将直接涂胶水改成双手同时涂胶水
第 六 章 动 作 分 析
第 (二)关于作业现场布置
六
章
——按双手能同时动作布置作业现场
动 作
能够用双手进行的作业,也有因作业现场布
置很差而无法同时用双手动作的情况。最理想的 情况按左右对称布置作业现场。
分
析
实例22:通过布置左右对称的作业现场使双手能
同时作业
作
分
➢实例19:用压板夹紧机构代替手柄螺旋夹紧机
析
构减少夹紧动作
第 六 章 动 作 分 析
第 4、用一个动作操作机器 六
章
经常使用开关和操纵柑器操纵器,
根据操作机构的不同,有的要花费很多
动
动作,有的只要一个动作。因此,要尽 量采用只需要一个动作的操作机构
作
分 析
例:回转式开关改为按钮式开关
第 六 章 动 作 分 析
动
设计出便于安装定位的夹具。同时,还要考虑一 次在夹具上能完成多件加工。
作
分 析
实例24:通过夹具实现双手同时操作带尾垫圈
的弯曲作业
第 六 章 动 作 分 析
第 三、基本原则3:缩短动作距离
六
章
(一)关于动作方法
动 作
(二)关于作业现场布置
分
析
(三)关于工夹具和机器
第 (一)关于动作方法 六 章 1、便于用最适当的人体部位动作
第 二、基本原则2:双手同时进行动作
六
章
(一)关于动作方法
动
(二)关于作业现场布置
作 分
——按双手能同时动作布置作业现场
析
(三)关于工夹具与机器
第 (一)关于动作方法
六
章
1、双手同时开始同时完成动作
要尽可能让双手同时进行作业动作。从动
动
作经济原则来讲,除休息以外作业过程中不允许
作
有双手空闲。
分 析
实例20:双手同时把元件插入电路板Biblioteka 第 六 章 动 作 分 析
第 六
2、双手对称、反向同时动作
章
从人体动作的容易程度讲,反复相同的运
动轨迹是最自然的动作。再则,若双手的运动
动
方向左右对称的话,还可以取得双手相互运动
作 分
的平衡,有节奏地进行动作,进行还能消除双 手在时间上的偏差,防止作业的差错。
析