12KG下料机械手设计
自动上下料机械手设计
自动上下料机械手的设计摘要随着机电一体化技术和计算机技术的应用,机械手的研究和开发水平获得了迅猛的发展并涉及到人类社会生产及生活的各个领域,特别是工业机械手在生产加工中的应用。
机械手是近代自动控制领域中出现的一种新型技术装备,它能模仿人体上肢某些动作,在生产中代替人搬运物体或操持工具进行动作,已成为现代机械制造系统中的一个重要组成部分。
本次设计主要设计自动上下料的机械手,该系统采用液压驱动,传动平稳,且易于控制,控制系统采用一般PLC所具有的位移寄存器和位移指令来编程。
关键词:机械手,液压驱动,控制系统目录1绪论 (1)2 工业机械手的设计方案 (2)2.1 工业机械手的组成 (2)2.2 上下料机械手的工作原理 (3)2.3 规格参数的选择 (3)2.4 设计路线与方案 (4)2.4.1 机械手的总体设计方案 (4)2.4.2 设计步骤 (4)2.4.3 研究方法和措施 (4)3 机械手各部分的计算与分析 (5)3.1 手部计算与分析 (5)3.1.1 滑槽杠杆式手部设计的基本要求 (5)3.1.2 手部的计算和分析 (5)3.2 腕部计算与分析 (12)3.2.1 腕部设计的基本要求 (12)3.2.2 腕部回转力矩的计算 (13)3.2.3 腕部摆动油缸设计 (16)3.2.4 选键并校核强度 (18)3.3 臂部计算与分析 (18)3.3.1 臂部设计的基本要求 (18)3.3.2 手臂的设计计算 (20)3.4 机身计算与分析 (28)4 液压系统设计 (29)4.1 液压系统总体设计 (29)4.2 液压元件的选择 (29)4.2.1 液压缸 (29)4.2.2 液压泵的选取要求及其具体选取 (31)4.2.3 选择液压控制阀的原则 (33)4.2.4 选择液压辅助元件的要求 (33)5 液压元件的保养与维修 (37)5.1 液压元件的安装 (37)5.2 液压系统的一般使用与维护 (37)5.3 一般技术安全事项 (37)6 结论 (39)参考文献 (40)致谢 (41)附录 (42)1绪论工业机械手是人类创造的一种机器,更是人类创造的一项伟大奇迹,其研究、开发和设计是从二十世纪中叶开始的。
自动送料机械手设计(含CAD图纸)

1 绪论1.1 机器人目前,工业机器人的定义,世界各国尚未统一,分类也不尽相同。
最近联合国国际标准化组织采纳了美国机器人协会给工业机器人下的定义:工业机器人是一种可重复编程的多功能操作装置,可以通过改变动作程序,来完成各种工作,主要用于搬运材料,传递工件。
参考国外的定义,结合我国的习惯用语,对工业机器人作如下定义:工业机器人是一种机体独立,动作自由度较多,程序可灵活变更,能任意定位,自动化程度高的自动操作机械。
主要用于加工自动线和柔性制造系统中传递和装卸工件或夹具[1]。
工业机器人以刚性高的手臂为主体,与人相比,可以有更快的运动速度,可以搬运更重的东西,而且定位精度相当高,它可以根据外部来的信号,自动进行各种操作。
工业机器人是在计算机控制下可编程的自动机器。
采用工业机器人是提高产品质量与劳动生产率,实现生产过程自动化,改善劳动条件,减轻劳动强度的一种有效手段。
机器人的诞生和发展虽只有30多年的历史,但它已应用到国民经济,民事技术等众多的领域,具有广阔的应用和发展前景,显示出强大的生命力[2]。
根据所处的环境和作业需求,工业机器人具有至少一项或多项拟人功能,如抓取功能或移动功能,或两者兼有之,另外还可能程度不等的具有某些环境感知功能(如视觉,力觉,触觉等)。
以及语音功能及至逻辑思维,判断决策功能等。
从而使其能在要求的环境中代替人进行作业。
在工业机器人的诸多功能中,抓取和移动是最主要的功能。
这两项功能实现的技术基础是精巧的机械结构设计和良好的伺服控制驱动。
本次设计就是在这一思维下展开的。
根据设计内容和需求确定圆柱坐标型工业机器人,利用锥齿轮传动实现机器人的旋转,利用液压缸实现其移动以及对零件的抓取。
在步进电机的控制下,机器达到精确的回转运动。
工业机器人的发展,由简单到复杂,由初级到高级逐步完善,它的发展过程可分为三代:第一代工业机器人就是目前工业中大量使用的示教再现型工业机器人,它主要由手部、臂部、驱动系统和控制系统组成。
毕业设计下料机械手
下料机械手摘要本次设计题目为“下料机械手”,所设计的机械手主要用于机械加工的搬运、下料作业。
本文介绍机械手的定义,机械手的分类、组成及应用意义,说明了自由度和机械手整体坐标的形式。
同时,本文给出了这台机械手的主要性能规格参量。
文章中介绍了下料机械手的设计理论与方法,全面详尽的讨论了下料机械手的手部、手臂以及箱体等主要部件的结构设计。
关键词机械手结构设计自动化AbstractThis design is entitled "Cutting Manipulator" robot designed mainly for machining the handling, cutting operations.This article describes the definition of robot, robot classification, composition and application of significance, indicating a degree of freedom and the coordinates in the form of the whole manipulator. We present this platform manipulator parameters of the main performance specifications.Under article describes the design of Manipulator theory and method,comprehensive and detailed discussion of the material under the robot hand, arm and box structure design of major components.Keywords:Manipulator The design of structure Automation一、前言(一)机械手的定义用于再现人手的功能的技术装置称为机械手。
上下料机械手设计(结构设计)任务书 (22)
各阶段工作任务
起止日期
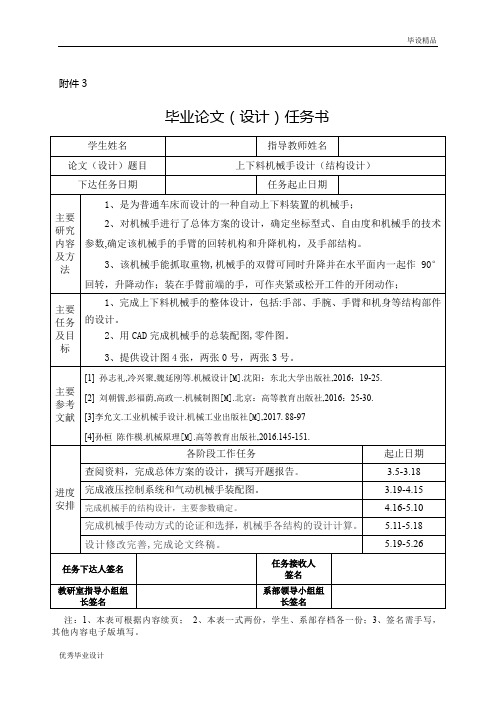
查阅资料,完成总体方案的设计,撰写开题报告。
3.5-3.18
完成液压控制系统和气动机械手装配图。
3.19-4.15
完成机械手的结构设计,主要参数确定。
4.16-5.10
完成机械手传动方式的论证和选择,机械手各结构的设计计算。
5.11-5.18
设计修改完善,完成论文终稿。
3、该机械手能抓取重物,机械手的双臂可同时升降并在水平面内一起作90°回转,升降动作;装在手臂前端的手,可作夹紧或松开工件的开闭动作;
主要任务及目标
1、完成上下料机械手的整体设计,包括:手部、手腕、手臂和机身等结构部件的设计。
2、用CAD完成机械手的总装配图,零件图。
[1]孙志礼,冷兴聚,魏延刚等.机械设计[M].沈阳:东北大学出版社,2016:19-25.
[2]刘朝儒,彭福荫,高政一.机械制图[M].北京:高等教育出版社,2016:25-30.
[3]李允文.工业机械手设计.机械工业出版社[M],2017. 88-97
[4]孙桓陈作模.机械原理[M].高等教育出版社,2016.145-151.
附件3
毕业论文(设计)任务书
学生姓名
指导教师姓名
论文(设计)题目
上下料机械手设计(结构设计)
下达任务日期
任务起止日期
主要研究内容及方法
1、是为普通车床而设计的一种自动上下料装置的机械手;
2、对机械手进行了总体方案的设计,确定坐标型式、自由度和机械手的技术参数,确定该机械手的手臂的回转机构和升降机构,及手部结构。
5.19-5.26
任务下达人签名
任务接收人
签名
教研室指导小组组长签名
下料机械手设计管理分析方案简介
提升设备利用率
通过引入新的技术和管理 方法,可以提高下料机械 手的设备利用率,减少设 备的闲置和浪费。
02 设计需求及目标
设计需求分析
01
02
03
04
精度要求
下料机械手在切割材料时需要 高精度的定位和切割,以确保
产品质量和生产效率。
稳定性需求
机械手在长时间连续工作时需 要保持稳定,避免因故障影响
机械手可靠性提升措施
总结词
提高机械手的可靠性是保证生产线稳定运行的关键。
详细描述
通过选用高质量的零部件、加强机械结构设计、实施定期维护和保养等措施,可 以显著提高机械手的可靠性。此外,针对潜在的故障和风险进行提前分析和预防 ,可以有效降低机械手的故障率,提高生产效率。
06 机械手样机试制及实验验 证
04 机械手设计管理方案
机械手设计管理方案
• 下料机械手设计管理分析方案是一套全面的设计管理体系,旨在确保下料机械手设计的效率、质量和安全性。该方案涵盖 了设计流程管理、设计资源管理和设计风险管理三个核心方面。
05 机械手设计优化及改进建 议
机构优化设计
总结词
机构优化设计是提高机械手效率和精度的关键。
实验数据分析及结论
数据处理
对实验测试得到的数据进 行分析和处理,提取有用 的信息。
结果对比
将实验结果与设计要求进 行对比,评估机械手的设 计是否符合实际应用需求 。
结论总结
根据实验数据分析结果, 总结机械手设计的优缺点 ,并提出改进建议。
THANKS FOR WATCHING
感谢您的观看
详细描述
通过对机械手机构进行详细的分析和仿真,可以发现潜在的问题和瓶颈,进而 进行优化设计。优化后的机构可以更好地适应不同的任务需求,提高机械手的 整体性能。
上下料机械手的结构设计
上下料机械手的结构设计一、绪论1、课题背景在现代工业中,生产过程的机械化、自动化和智能化已成为突出的主题。
化工等连续性生产过程的自动化已基本得到解决,但在机械工业中加工、装配等生产是不连续的。
专用机床是大批量生产自动化的有效办法,程控机床、数控机床及加工中心等自动化机械是有效地解决多品种小批量生产自动化的重要办法。
但除切削加工本身外,还有大量的装卸、搬运及装配等作业有待于进一步实现机械化,机器人的出现并得到应用为这些作业的机械化奠定了良好的基础。
“工业机器人”(Industrial Robot):多数是指程序可变(编)的独立的自动抓取,搬运工件,操作工具的装置(国内称作工业机器人或通用机器人)。
机器人是一种具有人体上肢的部分功能,工作程序固定的自动化装置,具有结构简单,成本低廉,维修容易的优势,但功能较少,适应性较差。
目前,我国常把具有上述特点的机器人称为专用机器人,而把工业机械人称为通用机器人。
简而言之,机器人就是用机器代替人手,把工件由某个地方移向指定的工作位置,或按照工作要求以操纵工件进行加工。
机器人一般分为三类:第一类是不需要人工操作的通用机器人,即本文所研究的对象。
它是一种独立的,不附属于某一主机的装置,可以根据任务的需要编制程序以完成各项规定操作,它是除具备普通机械的物理性能之外还具备通用机械、记忆和智能的三元机械;第二类是需要人工操作的,称为操作机 (Manipulator) 它起源于原子、军事工业,先是通过操作机来完成特定的作业,后来发展到用无线电讯号操作机器人来进行探测月球等。
工业中采用的锻造操作机也属于这一范畴;第三类是专业机器人,主要附属于自动机床或自动生产线上用以解决机床上下料和工件传送,这种机器人在国外通常被称之为“Mechanical Hand”,它是为主机服务的,由主机驱动,除少数外工作程序一般是固定的,因此是专用的。
机器人按照结构形式的不同又可分为多种类型,其中关节型机器人以其结构紧凑,所占空间体积小,相对工作空间最大,甚至能绕过基座周围的一些障碍物等这样一些特点,成为机器人中使用最多的一种结构形式,世界一些著名机器人的本体部分都采用这种机构形式的机器人。
毕业设计(论文)上下料冲压机械手的设计(全套图纸三维)

全套图纸,加 153893706
毕业设计外文摘要
Title
The design of the up-down material stamping manipulator
Abstract
Up-down material characteristics in the process of stamping manipulator is based on the actual production, specially in order to improve the production efficiency, human liberation and so on and developed an automated machinery and equipment. Based on the search after reading information about manipulator, simply introduces the function, composition and classification. Overall design of manipulator in accordance with the requirements of project, to determine the coordinates of the manipulator, degrees of freedom of movement and technical parameters of the manipulator. According to the manipulator hand, wrist, arm, and the fuselage structure design and calculation of the obtained data, and through 3D software solidworks to map the product model, and finally to improve the structure of the manipulator. At the same time, draw the manipulator working principle of the pneumatic system diagram, select the appropriate components. Using PLC to control the manipulator, selected the suitable PLC model; According to the working process of the manipulator made the control scheme of programmable controller, draw the operation flow chart of the manipulator.
上下料机械手毕业设计

上下料机械手毕业设计摘要:本文介绍了一种上下料机械手的设计方案。
该机械手主要由机械结构、运动控制系统和自动化控制系统三个部分组成。
机械结构采用钢材和铝合金制作,并通过特殊的设计实现了稳定可靠的运动。
运动控制系统采用伺服电机和编码器实现机械手的精准定位和运动控制。
自动化控制系统采用PLC和HMI实现工作流程的自动化控制和监控。
该设计方案具有结构简单、操作简便、稳定可靠等特点,适用于工业自动化领域的上下料操作。
1.引言上下料机械手是一种用于工业自动化上下料操作的装置,具有结构简单、操作便利、效率高等优点,广泛应用于各个领域。
然而,目前市场上的上下料机械手仍存在一些问题,比如结构不稳定、运动不精准等。
为了解决这些问题,本文提出了一种新的上下料机械手设计方案。
2.设计方案2.1机械结构该机械手的机械结构主要由钢材和铝合金制成,具有足够的强度和刚度。
并且,机械结构采用了特殊的设计,使得机械手在运动时具有稳定可靠的特性。
同时,机械手还配备了一些传感器,用于检测工件和夹具的位置和状态。
2.2运动控制系统该机械手的运动控制系统主要由伺服电机和编码器组成,用于实现机械手的精准定位和运动控制。
伺服电机通过控制电流来控制机械手的运动,编码器用于检测机械手的位置和速度。
2.3自动化控制系统该机械手的自动化控制系统主要由PLC和HMI组成,用于实现工作流程的自动化控制和监控。
PLC负责控制机械手的各个动作,如夹取、放置等,HMI用于操作和监控整个系统。
3.实验与结果为了验证该机械手的设计方案,我们进行了一系列实验。
实验结果表明,该机械手能够稳定可靠地完成上下料操作,并且具有较高的定位精度和运动控制精度。
同时,该机械手的自动化控制系统能够有效地提高工作效率。
4.结论本文设计了一种上下料机械手的新方案,该方案具有结构简单、操作简便、稳定可靠等特点,适用于工业自动化领域的上下料操作。
然而,该设计方案还有一些局限性,比如只适用于特定工件和夹具。
上下料机械手结构设计
上下料机械手结构设计
上下料机械手是工业自动化领域中常见的设备,用于在生产线
上进行物料的搬运和装配。
其结构设计需要考虑以下几个方面:
1. 机械手类型,根据实际需求,可以选择不同类型的机械手,
比如直线运动机械手、旋转机械手、SCARA机械手等。
每种类型的
机械手都有其适用的场景和特点,需要根据具体的作业需求来选择。
2. 关节结构,机械手通常由多个关节组成,关节的结构设计需
要考虑到负载能力、精度要求、速度要求等因素。
常见的关节结构
包括直线传动、齿轮传动、伺服电机驱动等,需要根据具体情况选
择最合适的结构。
3. 末端执行器,末端执行器是机械手的关键部件,用于实际的
物料抓取、放置和装配。
末端执行器的设计需要考虑到抓取力度、
抓取形状、灵活性等因素,常见的末端执行器包括气动夹爪、机械
夹具、吸盘等。
4. 控制系统,机械手的结构设计需要与控制系统相匹配,确保
机械手能够按照预定的路径和速度进行运动。
控制系统通常包括传
感器、编码器、控制器等部件,需要与机械手的结构设计相协调。
5. 安全性考虑,在机械手的结构设计中,需要考虑到安全性因素,确保机械手在运行过程中不会对操作人员或周围环境造成伤害。
这包括安全防护装置的设置、紧急停止系统的设计等。
综上所述,上下料机械手的结构设计需要综合考虑机械手类型、关节结构、末端执行器、控制系统和安全性等多个方面的因素,以
确保机械手在实际生产中能够高效、安全地完成物料的搬运和装配
任务。
自动上下料机械手手部结构的设计
【 i 1陈长民,李丽霞 《 国际经济学》 【 M 1中国人 民大学出版社 2 0 0 4 [ 2 】 范科 才 ,周 黎 瑶 中 国 巨额 外 汇储 备 的成 因 、影 响及应 对 策 略 … 大 众商 务 2 0 1 0( O 6】 [ 3 ] 黄 莹 试论 当前 我 国外 汇储 备 存 在 的 问题及 其 对 策 【 J ] 现代 商 业
综上所述,外汇储备是平衡 国际收支的项 目,其增长是运行宏观 经济的成 果,反映出的是汇率政策与外汇管理政策 。外汇储备保持充 足有助 于国际偿还能力的增强,有助于对金融风险的防范 ,维护经济 安全 但这并不代表储备越 多的外汇就越好,外汇储备只有协调好内 外经济平衡才是合理 的,这也是储备外汇追求的 目标 。
动 力下 ,可 以 实现 圆柱 类零 件的 抓 肾与放 开 。 关键 词 :机械 手 ;手部 ;结构 设计
在现代工业生产 自动化领域里,材料 的搬运 、机床 的上下料、征 集的装配等是个薄弱环节 。在机械工业部 门,这些 工序 的费用 占全部 加工费用三分之一以上 ,所 费时间约 占全部加工时间三分之二 以上, 而且绝大多数的事故发生在这些工序 。自动上下料装置和工业机械手 就是为实现这些工序的 自动化而设计和采用的。
强度要求 。 ② 中1 1 . 8 2 铆钉强度校核 铆钉选用4 5 钢;4 5 钢的屈服强度是3 5 5 I  ̄a ;
铆钉 受 挤 压 力 ,于 是挤 压 应 力 为:
1 5 x l O— xl 1 . 8 2 x l O一 =1 . 9 7 x l O Pa
J
2 0 1 2( 3 5)
科学技术
自动上 下料机械手手部结构 的设计
黄文婷
( 江 西 科技 学 院 ,机 械 工程 学院 江西 南昌手是 一 种模 仿人 手 动作 ,根 据控 制 程序 自动 完成 操 作 的装 置 ,本 文 进行 了机 械 手手部 结 构 的设计 ,该 机 构液 在压 缸 的驱
自动上下料机械手毕业设计
3.机器人中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机器人还应用了视觉、力觉等传感器,而遥控机器人则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行决策控制;多传感器融合配置技术成为智能化机器人的关键技术。
1962年美国机械铸造公司也试验成功一种叫Versatran机械手,原意是灵活搬运。该机械手的中央立柱可以回转,臂可以回转、升降、伸缩、采用液压驱动,控制系统也是示教再现型。虽然这两种机械手出现在六十年代初,但都是国外工业机械手发展的基础。
1978年美国Unimate公司和斯坦福大学、麻省理工学院联合研制一种Unimate-Vic-arm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差可小于±1毫米。
第二代机械手正在加紧研制。它设有微型电子计算机控制系统,具有视觉、触觉能力,甚至听、想的能力。研究安装各种传感器,把感觉到的信息反馈,使机械手具有感觉机能。目前国外已经出现了触觉和视觉机械手。
第三代机械手(机械人)则能独立地完成工作过程中的任务。它与电子计算机和电视设备保持联系。并逐步发展成为柔性制造系统FMS(Flexible Manufacturing system)和柔性制造单元(Flexible Manufacturing Cell)中重要一环。
瑞士RETAB公司生产一种涂漆机械手,采用示教方法编制等。
日本是工业机械手发展最快、应用最多的国家。自1969年从美国引进二种典型机械手后,大力研究机械手的研究。据报道,1979年从事机械手的研究工作的大专院校、研究单位多达50多个。1976年个大学和国家研究部门用在机械手的研究费用42%。1979年日本机械手的产值达443亿日元,产量为14535台。其中固定程序和可变程序约占一半,达222亿日元,是1978年的二倍。具有记忆功能的机械手产值约为67亿日元,比1978年增长50%。智能机械手约为17亿日元,为1978年的6倍。截止1979年,机械手累计产量达56900台。在数量上已占世界首位,约占70%,并以每年50%~60%的速度增长。使用机械手最多的是汽车工业,其次是电机、电器。预计到1990年将有55万机器人在工作。
物料搬运机械手结构设计
物料搬运机械手结构设计
物料搬运机械手是一种用于搬运和移动物料的自动化设备,其结构设计是关键之处。
在设计物料搬运机械手的结构时,需要考虑到以下几个方面。
物料搬运机械手的结构应该具有足够的稳定性和承载能力。
在搬运重物料的过程中,机械手需要能够稳定地承受重量,并确保物料不会因为机械手的摇晃而受损。
因此,在设计结构时,需要考虑到机械手的整体重量分布以及各个零部件的强度和稳定性。
物料搬运机械手的结构设计还需要考虑到灵活性和可调性。
不同的物料搬运任务可能需要不同的操作方式和角度,因此机械手的结构应该具有一定的灵活性,能够适应不同的工作环境和要求。
同时,机械手的各个关节应该具有可调性,可以根据实际需要进行调整,以实现更高效的搬运操作。
物料搬运机械手的结构设计应该考虑到安全性和可靠性。
在搬运物料的过程中,机械手需要能够确保物料和操作人员的安全,避免发生意外事故。
因此,在设计结构时,需要考虑到安全防护装置的设置以及机械手的自动停机功能,以确保在出现异常情况时能够及时停止工作,保障人员和设备的安全。
物料搬运机械手的结构设计也需要考虑到维护和维修的便利性。
机械手作为一种机械设备,需要定期进行维护和保养,以保证其正常
运行。
因此,在设计结构时,需要考虑到各个零部件之间的连接方式和拆卸方式,确保维护人员能够方便地进行维修和更换零件。
物料搬运机械手的结构设计是一个复杂而关键的过程,需要综合考虑稳定性、灵活性、安全性和维护性等因素。
只有在合理设计的基础上,物料搬运机械手才能实现高效、安全和可靠的搬运操作,为生产和工作提供有效的支持。
下料机械手设计管理分析方案简介
下料机械手设计管理分析方案简介在制造业中,下料机械手是一种常见的自动化设备,它能够大幅提高生产效率和质量。
一个好的下料机械手设计管理分析方案能够在实践中发挥很大的作用,本文主要介绍下料机械手设计管理分析方案的重要性,方案内容以及方案的实施过程。
一、下料机械手设计管理分析方案的重要性下料机械手是对生产线的一个重要环节,其中的设计、管理与分析非常重要。
下料机械手设计要符合生产线的需要,使得产品得到稳定的生产,从而提高生产效率,产量和产品质量。
下料机械手的管理需要保证机械手的安全、可靠、高效、节约等,从而使得生产活动能够快速、高效、有序地开展。
下料机械手分析则是保证了各项指标的合理性和优化性,从而使得企业能够更快、更好、更完整地完成生产。
二、下料机械手设计管理分析方案内容下料机械手设计、管理、分析方案,一般包含如下内容:1. 下料机械手的设计方案设计方案是指下料机的针对进口产品、订单、自动化程度等各种不同的情况下,所制定的机器人工作方案,包括系统组成、机器人主体参数、机器人各部件的工作原理、机器人辅助装置等。
2. 下料机械手的管理方案在机器人管理中,需要确定其安全状况、可靠性、人员管理和维修保养等各种情况,保障机器人的稳定运行和安全生产。
下料机械手的安全保障方案主要包括机器人的安装、机器人所在的生产环境、设备操作人员的安全管理和机器人运行的安全措施等。
下料机械手的可靠性保障方案,主要包括以下几个方面:机器人系统的可靠性设计、设备的维护保养、机器人的维护程序、机器人故障诊断与排查方案等。
3. 下料机械手的分析方案下料机械手分析方案主要是对机器人的各项指标进行监测、对照、统计和分析。
机器人各项指标主要包括:生产效率、工作效率、设备运行时间、工作成本和稼动率等,这些指标是公司核心竞争力的重要表现。
三、下料机械手设计管理分析方案实施过程下料机械手的设计管理和分析方案,需要严格按照设计要求、制定的管理方案和分析方案进行实施,下面将具体介绍方案的实施过程:1. 设计阶段在下料机械手的设计阶段,应当考虑工艺细节,结合企业需求进行定制,主要包括:如何进行处理,如何进行下料等,这些设计要求直接影响到机器人的整体实施和使用。
上下料机械手结构设计【带查重】

摘要
在当下生产过程中正在向机械化,与自动化方向发展。
在机械工业中装卸、装配等环节中利用的机械手会越来越广泛。
它可最大限度减少工人的劳动强度,改善产品的生产质量。
上下料机械手采用了两个旋转关节和一个运动关节;两个回转关节完成x,y目标的运动,而移动关节则完成z目标的运动。
工业机械手是一种模仿人手的一部分抓举形式,按照事先设定好的程序,完成抓取、搬运工件等一系列运动。
它在二十世纪五十年代就已经在工厂里工作了,是在搬运机械手的基础上成长起来的一种机器,开始主要实在上下料和搬运工件等工作形势中,随着运用领域的不段发展,当下主要用来夹持工具和完成大部分的作业。
在当代生产中,它可以代替人大部分的工作量,改善工人的活动情况,提高生产效益。
本次设计的上下料机械手主要运用于零件的上下料过程,主要设计一款有上料、回转、平移等具备多种功能形式的上下料机械手。
本次设计的多功能机械手主要从以下几个方面进行设计说明:
第一,概括课题研究的意义,对国内外机械手的特点和发展概况进行了综述,并提出本文的研究内容。
第二,明确抓取机械手的设计要求,对机械手进行功能结构分析,初步提出设计方案,简要说明这些机构中的单元解。
最后结合自己看过和参考的文献,提出自己的总体设计方案。
第三,设计机械手。
首先对机械手抓进行设计,接着设计出腕部回转液压缸以及伸缩臂的设计,同时利用电脑辅助软件对机械手的结构和运动进行仿真。
在设计的过程中对其进行详细的计算,力争使结构合理,起到优化设计的目的。
关键词:上下料、液压、机械手。
毕业资料大全

冲压模具1、冲压模具2、单耳止动垫圈的冷冲模设计3、挡板冲裁级进模设计4、封闭板成形模及冲压工艺设计5、钢窗五金配件的模具设计6、冷冲模7、冷冲压条形垫设计8、离合器板精冲成形模具设计9、软盘保护垫冲孔拉深落料10、收放机架安装支架冲压工艺及模具设计11、新型端盖无毛刺冲孔模具设计12、扬声器锥形盘架复合模设计13、油封骨架冲压模具14、云母片落料复合模设计15、照相机零件冲压16、止动件冲压模具--------------------------------------塑料模具1、DVD遥控器外壳上半部分2、单耳止动垫圈的冷冲模设计3、挡板冲裁级进模设计4、封闭板成形模及冲压工艺设计5、钢窗五金配件的模具设计6、冷冲模**7、冷冲压条形垫设计8、离合器板精冲成形模具设计9、软盘保护垫冲孔拉深落料10、收放机架安装支架冲压工艺及模具设计11、新型端盖无毛刺冲孔模具设计12、扬声器锥形盘架复合模设计13、油封骨架冲压模具14、云母片落料复合模设计15、照相机零件冲压16、止动件冲压模具----------------------------------塑料模具1、DVD遥控器外壳上半部分塑料模具设计2、wk外壳注塑模实体设计过程3、把手封条4、笔盖的模具设计5、笔记本电脑壳6、变压器外盖模具设计7、齿轮联轴器注塑模8、大功率三极管管脚9、灯座注射模10、电风扇旋扭的塑料模具设计11、电话机外壳注射模设计12、电源盒注射模设计13、放大镜模具的设计与制造14、放音机机壳注射模设计15、肥皂盒16、风扇注射模具设计17、固定座注射模设计18、基于ProE的A1型塑料模架建库及应用19、基于UG系统汽车覆盖件模具设计20、镜架底座零件注射模设计21、卡盖注射成型模具的设计22、老板椅底支架设计(陈华)23、面巾纸塑料盒注塑模具的设计24、闹钟外壳注塑模25、尼龙转套模具设计26、瓶塞注射模设计27、普通开关按钮28、生化反应架注射模具设计29、收放机架安装支架冲压工艺及模具设计30、手机充电器塑料模具31、手机电池后盖注塑模32、手机上盖塑料模33、手机外壳注射模34、塑料传动机架注塑模35、塑料拉手注塑模具设计36、塑料瓶盖注塑模37、塑料线卡模具设计38、台灯插座注塑模具设计与制造39、椭圆盖40、涡旋压缩机动蜗盘塑料模设计41、五寸软盘盖注射模具设计42、线圈骨架注塑模设计43、小电机外壳造型和注射模具设计44、斜齿轮注射模45、心型台灯塑料注塑模具**46、行星齿轮的注塑模具设计及其模腔三维造型CADCAM47、旋臂盖注塑模设计48、药用瓶盖**49、医疗针筒套**50、罩壳注塑模设计51、中诺CHIND-E型电话机听筒外壳注射模具设计52、注塑杆端关节轴承注塑模---------------------------------------减速器类1、5+1变速器设计2、10KW圆锥-圆柱齿轮减速器的设计3、DT-(Ⅱ)胶带输送机设4、二级斜齿轮减速器5、二级圆柱直齿齿轮减速器6、三环减速器7、三速变速箱及其操纵机构设计8、同轴式二级圆柱齿轮减速器9、蜗轮蜗杆减速器10、蜗轮—蜗杆减速器的二级传动设计11、一级减速器(全部)12、游梁式抽油机传动设计13、圆锥齿轮减速器设计14、圆锥圆柱二级减速器15、轧钢机减速器的设计16、展开二级圆柱减速器17、轴装式二级齿轮减速器18、铸工车间型砂带式输送机传动装置19、自动洗衣机行星齿轮减速器的设计-------------------------------------------数控零件加工1、3L-108空气压缩机曲轴零件的机械加工工艺及夹具设计2、ck6163数控车床进给箱夹具3、DVD遥控器外壳上半部分塑料模具设计4、典型零件(LWJ-207固定式空压机曲轴)的工艺及工装设计5、典型零件(峨柴牌柴油机机体铣床夹具及工艺分析)6、共轭凸轮的设计制造(CADCAM)及工艺7、空压机吸气阀盖头加工工艺编程及夹具8、螺栓数控加工9、尾座体的加工工艺,以及腰孔加工的夹具及编程设计G代码10、细长轴的机械加工11、心轴机械加工工艺分析及数控编程12、压缩机关键部件的工艺设计及数控编程13、支承套零件加工工艺编程及夹具14、支承套零件数控加工工艺分析及工艺装备设计15、支架零件加工工艺编程及夹具16、左支座零件数控加工17、座体的工艺分析及数控加工------------------------------------------------------数控化改造1、C616型普通车床改造经济型数控车床2、C618数控车床的主传动系统设计3、C620普通车床进行数控改造4、C6136经济型车床数控改造5、C6140车床数控化改造之机械系统改造26、C6140型普通车床改造数控机床17、CA6140车床横向进给改造的设计8、CA6140普通车床的经济型数控改造设计9、CA6150车床横向进给改造的设计10、CA6150数控改造总装图11、CK6163B车床主轴箱数控加工12、CM6132型精密车床主传动系统数控改造设计13、X52K数控铣床改造14、X53K立式铣床数控改造15、X53K立式铣床数控改造(横向)16、X53K立式铣床数控改造(纵向)17、XA6132控制部分的数控化改造18、将旧车床改造成拉削齿轮内花键的拉床及浮动部分设计19、将旧车床改造成拉削齿轮内花键的拉床及主体部分设计20、拉伸试验机数控改造21、普通钻床改造为多轴钻床22、数控立式钻铣床改造--------------数控机床设计1、C6132A型车床的自动安全保护装置的设计2、CA6140机床主轴箱的设计3、CJK6132数控车床及其控制系统设计4、CK6140数控卧式车床及控制系统的设计5、ck6163数控车床进给箱夹具6、DK7132数控电火花穿孔成型加工机床及其控制系统设计7、DK7732数控高速走丝电火花线切割机及控制系统8、XKA5032AC数控立式升降台铣床自动换刀设计9、XKA5032AC数控立式升降台铣床自动换刀装置(刀库式)设计10、XTK7140数控立式铣镗床及控制系统设计11、X-Y数控工作台12、精密数控磨床的总体设计13、数控焊接钢管飞锯机及其控制系统设计14、数控龙门三**H型钢自动火焰切割机15、数控铣床的主轴箱结构设计16、无动力回转台设计-----------------机械手设计1、8KG下料机械手设计2、12KG下料机械手设计3、PLC控制直列式加工自动线设计4、R175型柴油机机体加工自动线上用的多功能机械手5、安全带轧染整形生产线的设计6、拨叉加工自动线设计7、大型加工中心换刀机械手的设计8、多用途气动机器人结构设计9、非同步输送带125(打印机)10、红外遥控六足爬虫机器人设计11、集装箱波纹板焊接机器人机构运动学分析及车体结构设计12、加工中心16刀刀库(盘式刀库)13、加工中心40刀刀库(链式刀库)14、加工中心的换刀系统15、硫化机送料机械手16、平面关节型机械手设计17、气动通用上下料机械手的设计18、三自由度机器人(机械手)19、送料机械手设计20、送料机械手设计及Solidworks运动仿真21、五自由度工业机器人及三维造型22、液压-自动上下料机械手设计23、圆柱坐标型机器人整体24、运送铝活塞铸造毛坯机械手设计25、直列式加工自动线机械部分和气动设计---------------------------------------------------加工工艺及夹具刀具设计1、92Q型气缸盖双端面铣削组合铣床总体设计2、“差速器壳”的工艺规程和钻端面12孔钻床夹具设计3、AVC1200电机座的工艺及其底座6个沉孔和2个销孔的钻孔夹具设计4、C6410车床拨叉.卡具设计5、CA6140车床后托架的加工工艺及夹具设计6、CA6140床头箱I轴加工工艺及夹具刀具设计7、ck6163数控车床进给箱夹具8、CK-I型数控机床主轴箱9、D85推土机齿轮工艺及刀具设计10、EQ140变速箱二轴三档齿轮工艺夹具及刀具设计11、G41J-6型阀体双面钻24孔专机上的专用夹具设计12、S195柴油机机体三面精镗组合机床总体设计及夹具设计13、VF67空气压缩机曲轴加工工艺及夹具设计14、X5020B立式升降台铣床拨叉壳体工艺及夹具设计15、XK5032A螺母座螺母座夹具及工艺设计16、YZ485机体钻、扩滤清器面孔组合机床17、泵体工艺规程及镗Φ48H8孔夹具设计18、拨叉加工工艺及夹具设计19、叉杆的工艺工装设计及三维造型加工(caxa-NC)20、柴油机齿轮室盖钻镗专机总体及夹具设计21、柴油机齿轮室盖钻镗专机总体及主轴箱设计22、柴油机机体机械加工工艺及23、柴油机连杆体的机械加工工艺规程的编制24、柴油机气缸体顶底面粗铣组合机床总体及夹具设计25、柴油机气缸体两端面粗铣组合机床总体及夹具设计26、车床小刀架机械加工工艺27、齿轮轴的制造与工艺-细长轴28、粗、精铣削某发动机连杆大小头两端专用夹具及双端面组合铣床设计(连杆,轴)29、粗镗活塞销孔专用机床及夹具设计30、典型零件工艺工装设计--摇臂31、定位支座零件数控多工位夹具设计32、东方红拖拉机变速箱箱体工艺33、杠杆夹具加工34、共轭凸轮的设计制造(CADCAM)及工艺35、勾尾框夹具设计36、后钢板弹簧吊耳加工工艺及夹具设计37、拉杆臂的工艺工装设计38、立木地板加工机床-成型机分度机构39、立木地板加工机床成型机---夹具设计40、立木地板加工机床成型机-主轴设计41、立木马赛克成型机床42、立木马赛克排刀切片机主轴设计43、连杆盖的工艺工装设计44、连杆加工工艺及夹具设计(平切口)45、连杆孔加工工艺与夹具设计46、连杆零件加工工艺规程及专用钻床夹具的设计47、溜板箱**说明书48、轮辐专用六轴钻床设计49、美国赛车连杆工艺规程编制50、美国赛车连杆专用工装夹具设计51、某机型铰链座制造与工艺夹具52、平切口连杆的工艺工装设计53、气缸体上端面夹具54、气门摇臂轴支座工艺工装设计55、汽车连杆加工工艺及夹具设计(打印)56、三孔双向卧式组合镗床设计57、三用阀右阀筒工艺规程及夹具设计58、输出轴的工艺工装设计59、锡林右轴承座组件工艺及夹具设计60、铣床尾座顶尖套双槽铣夹具设计61、箱体顶盖零件工艺规程及工装设计62、箱体加工63、压缩机关键部件的工艺设计及数控编程64、摇臂的工艺工装设计65、移动手柄的工艺工装设计66、支承套零件数控加工工艺分析及工艺装备设计67、座体的工艺分析及数控加工----------------------------------------电气控制PLC/单片机类1、CA-20型地下自卸汽车电气系统设计及PLC控制设计2、CJK6132数控车床及其控制系统设计3、CK6140数控卧式车床及控制系统的设计4、DK7132数控电火花穿孔成型加工机床及其控制系统设计5、DK7732数控高速走丝电火花线切割机及控制系统6、J45-6.3型双动拉伸压力机的设计7、MJ2325电动机8、PLC控制直列式加工自动线设计9、PLC在高楼供水系统中的应用0、PLC自动控制交通灯11、SH280X85卧式混合机12、XA6132控制部分的数控化改造13、XTK7140数控立式铣镗床及控制系统设计14、YWS32-315粉体成形液压机(电气系统)设计15、ZG0615型电机振动给料机及电气控制16、拨叉加工自动线设计17、产品计数器单片机18、单片机8031的小型龙门刨床的数控改造19、单片机控制的数控机床的插补(插补器)20、单片机控制的数控机床的插补(环型分配器)21、电炉智能温度测控仪的设计(单片机)22、工业电路板检测(单片机)23、观光电梯的电气控制系统设计PLC24、红黄绿交通灯控制器设计(单片机)25、弧面蜗杆加工专用数控机床及控制系统设计26、机械式双头套皮辊机设计27、基于PLC的数控铣床的设计与开发28、基于单片机的太阳跟踪装置控制系统的研究29、集成加速度传感器的软件设计(单片机)30、烤面包机31、拉伸试验机数控改造32、立式换刀装置进行结构和控制系统33、链式刀库PLC34、六位数显电子锁(单片机)35、啤酒灌装装置设计36、啤酒桶清洗机的设计及PLC控制37、升降电梯驱动系统设计及控制电路设计38、生产线上运输升降机的自动化设计PLC39、数控多工位钻床设计X.Y向进给系统回转工作台系统40、数控焊接钢管飞锯机及其控制系统设计41、塑料门窗锯切中心气动部分设计42、无轴承电机的结构43、小型加工中心换刀机械手的设计-PLC44、轴承座与减速器间密封圈自动涂胶机的设计45、自动扶梯驱动机及其控制电路设计46、自动加料机控制系统47、自动控制中心传动提耙式刮泥机48、自动人行道设计及plc控制49、自动弯管机装置及其电器设计-------------------------------专用机床设计1、45#刀柄拉刀机构(说明书2、50#刀柄拉刀机构设计3、92Q型气缸盖双端面铣削组合铣床总体设计4、C6132机床主传动设计5、CK-I型数控机床主轴箱6、G41J-6型阀体双面钻24孔专机上的专用夹具设计7、YZ485机体钻、扩滤清器面孔组合机床8、柴油机齿轮室盖钻镗专机总体及夹具设计9、柴油机齿轮室盖钻镗专机总体及主轴箱设计10、柴油机连杆体的机械加工工艺规程的编制11、柴油机气缸体顶底面粗铣组合机床总体及夹具设计12、柴油机气缸体两端面粗铣组合机床总体及夹具设计13、粗镗活塞销孔专用机床及夹具设计14、电磁阀体中心孔加工组合机床15、多轴钻床16、弧面蜗杆加工专用数控机床及控制系统设计17、加工电机座组合机床设计18、轮辐专用六轴钻床设计19、三孔双向卧式组合镗床设计20、双面铣组合机床的设计-----------------------------------------三维造型1、DF7内燃机试验站控制装置设计2、DVD遥控器外壳上半部分塑料模具设计3、风扇注射模具设计4、基于ProE的A1型塑料模架建库及应用5、基于UG系统汽车覆盖件模具设计6、老板椅底支架设计(陈华)7、冷冲模**8、离心分离器结构设计9、手机电池后盖注塑模10、送料机械手设计及Solidworks运动仿真11、塑料拉手注塑模具设计12、五自由度工业机器人及三维造型13、行星齿轮的注塑模具设计及其模腔三维造型CADCAM14、轴承卡簧卷制机设计-------------------------------汽修类设计1、5+1变速器设计2、2、CA-20型地下自卸汽车电气系统设计及PLC控制设计3、3、DF7内燃机试验站控制装置设计4、4、K150卡丁车发动机设计5、5、NO 23 双柱式汽车举升机设计6、6、电喷发动机摩托车传动系统7、7、可四轮定位四柱式汽车举升机设计8、8、膜片式离合器设计(自带)9、9、汽车U型螺母拆装机**10、10、汽车弹簧单工位弯耳机设计11、11、汽车制动传动实验平台12、12、液压马达测试系统及动力源设计13、--------------------------------------特定机构设计1、57BYGH 永磁感应子式步进电机2、6105柴油机连杆及连杆螺栓迁都分析3、C6132A型车床的自动安全保护装置的设计4、C6410车床拨叉.卡具设计5、CA6140机床主轴箱的设计6、CA6150车床横向进给改造的设计7、CA6150数控改造总装图8、CA-20型地下自卸汽车电气系统设计及PLC控制设计9、DF7内燃机试验站控制装置设计10、DG型液压缸的设计11、DSZY-50多功能液压装仓机12、DTⅡ型皮带机设计13、JHMB-14慢速绞车14、JKMD型多绳摩擦提升机15、K150卡丁车发动机设计16、LB2000沥青搅拌机设计17、LH9900拉丝机卷筒机构设计18、NO 23 双柱式汽车举升机设计19、SH280X85卧式混合机20、TGSS-50型水平刮板输送机-机头段设计21、WE67K-5004000液压板料折弯机22、WY型滚动轴承压装机设计23、XRB80型乳化液柱塞泵结构设计24、YT-6手持圆弧倒角机的设计25、ZRJ-350A真空乳化机传动系统和搅拌系统设计26、ZRJ-350A真空乳化机传动系统和搅拌系统设计-化工27、Φ1200熟料圆锥式破碎机28、φ1500㎜齿轮毛坯专用车床的研制29、φ3200×3100格子型球磨机设计30、安全带轧染整形生产线的设计31、岸桥前大梁的工艺过程和工艺过程32、拨叉加工自动线设计33、茶树重修剪机的设计34、城市道路护栏清洗车刷洗箱设计35、城镇污水处理厂设计(**)36、齿轮轴的锻模成形工艺及模具设计37、齿耙清污机38、带式提升机12米45°72吨小时39、电动绞车40、电喷发动机摩托车传动系统41、电主轴的机械设计42、东风EQ140汽车驱动桥、离合器和变速箱结构设计43、多功能甘蔗中耕田管机改进设计44、多功能自动跑步机(机械部分设计)45、反应搅拌机46、非同步输送带125(打印机)47、钢筋调直机48、钢筋弯曲机设计49、杠杆夹具加工50、高压水射流喷丸机床51、隔水管套内焊缝自动焊接机设计52、刮板式流量计设计53、海陆侧立柱制作检验指导书54、洪干机55、后端盖注塑模具设计56、化工压力容器)0.5m 电-蒸热水柜设计57、机床安装用起重机的设计(梁与小车)58、机械式双头套皮辊机设计59、基于摩擦片式高锁定系数差速器的设计60、夹体自动下料机构61、简易卧式铣床传动装置设计62、绞肉机的设计63、节滑动叉的设计及其制造64、金刚石砂轮修整器65、精密数控磨床的总体设计66、精益生产思想下汽车发动机零部件在工厂内的物流(小物流)67、烤面包机68、可四轮定位四柱式汽车举升机设计69、空气压缩机V带校核和噪声处理70、离心分离器结构设计71、离心式渣浆泵结构设计72、立式过滤沉降离心机(总体设计及外壳部件设计)73、链驱动双层升降横移式立体车库74、链式推爪驱动传动装置75、露天健身器材的创新设计76、绿豆精选机设计77、螺旋离心泵结构设计78、膜片式离合器设计(自带)79、磨粉机工作原理及结构设计80、皮带给料机结构设计(7°)81、皮带输送机设计(无角度)82、平面四杆机构运动仿真与综合vb83、气动式定尺飞锯机及锯切84、汽车U型螺母拆装机**85、汽车弹簧单工位弯耳机设计86、汽车液压制动驱动机构的设计87、汽车制动传动实验平台88、汽车总体设计的计算机辅助设计系统vb89、桥式起重机副起升机构设计90、球径收机机设计91、全封闭输送机92、全自动制袋机93、热处理加热炉装料机传动装置94、食品包装纸箱传送系统95、数控焊接钢管飞锯机及其控制系统设计96、数控龙门三**H型钢自动火焰切割机97、双铰接剪叉式液压升降台的设计98、双速绞车设计99、水泥带式输送机(平行输送)100、水平带式输送机设计101、提升机制动系统(液压盘式制动器)设计102、脱水斗式提升机设计103、卧式钢筋切断机的设计104、污水处理的全自动加药系统(螺旋加药)105、无动力回转台设计106、新型揉搓式洗衣机的设计107、行走式小型液压起重机设计(机架和小车设计) 108、旋流泵结构设计与计算109、旋转托棍机110、压轧机111、秧苗移栽试验台铺土装置设计112、永磁直线电机的有限元分析及计算113、渔网定型机114、轧车传动装置设计115、闸门启闭机116、轴承卡簧卷制机设计117、转向臂锻模成形工艺与模具设计目录118、准平行环面蜗杆提升机119、自动弯管机装置及其电器设计----------------------------------------杂类1、模具-五金-冲大小垫圈复合模2、CA6140车床改进**-单片机JWK-15T数控装置零件加工程序3、齿辊破碎机详细设计-中英文4、花生去壳机5、自由度焊接机器人设计6、CA6140车床改进**-JKW-15T型号的单片机7、CA6140填料箱盖工艺过程卡及数控编程设计8、dt250斗式提升机全套**(水泥谷物)-工学院9、GSS-50型水平刮板输送机---机头段设计10、J45-6.3型双动拉伸压力机的设计U7044911、QY40型液压起重机液压系统设计计算说明书.附CAD图12、XK5040数控立式铣床及控制系统设计-数控技术-立式铣床-中英文13、本科-电机炭刷架冷冲压模具设计14、**-花生去壳机215、播种机设计16、采煤机截割部的整体设计17、叉车设计18、齿辊破碎机详细设计19、齿轮箱工艺及钻2-φ20孔、工装及专机设计20、齿轮箱工艺及钻2-φ20孔、工装及专机设计U7044921、齿轮箱工艺及钻8-φ13孔、工装及专机设计-电器控制原理图22、冲压汽车灯罩23、带式二级圆锥圆柱齿轮减速器设计24、带心行图案的把手水杯设计25、单级圆柱齿轮减速器设计26、电子钟后盖注射模具设计27、电子钟后盖注射模具设计-程序28、法兰盘加工工艺及其夹具设计29、飞机起落架设计30、盖子零件注射模设计31、杠杆及夹具体设计32、攻丝组合机床设计设计33、攻丝组合机床设计设计图34、谷物运输机传动装置设计35、活塞结构设计与工艺设计36、绞肉机的设计37、靠模攻丝组合机床38、可调速钢筋弯曲机的设计39、矿用液压支架的设计40、例文-程序设计41、连接片冲模设计-proe三维图42、螺旋千斤顶设计-举升机43、纳米粉体的实验装置**44、纳米粉体的实验装置**-中英文言45、齐齐哈尔大学传动剪板机设计46、起重机总体设计及金属结构设计47、汽车连杆夹具48、桥式起重机小车运行机构设计49、切管机**50、青饲料切割机51、清车机**-中英文52、清扫矿车-清车机-中英文53、清新剂盒盖注射模设计54、驱动桥设计-**55、数控车床刀架及其液压系统的设计-加工程序56、双螺杆压缩机的设计57、双螺杆压缩机的设计-中英文58、水峪矿300万吨新井设计-中英文59、提升机制动系统设计-液压盘式制动器设计-中英文60、填料箱盖-工艺过程卡及数控编程设计夹具61、填料箱盖夹具设计-工艺过程卡62、铁水浇包倾转机构的设计63、万能外圆磨床液压传动系统设计64、稳罐装置-立井罐笼提升的稳罐装置与摇台65、五金-冲大小垫圈复合模66、铣床的数控X-Y工作台设计67、移动式X光机总体及移转组件设计68、玉米脱粒机设计-去壳机-去皮机69、钥匙模具设计70、钥匙模具设计-冲压模具71、制动系统提升机-多绳摩擦-提升机制动系统(液压盘式制动器72、制浆机**-多功能制浆机73、中央泵房自动控制设计-手动控制接线-PLC74、轴向柱塞泵设计75、组合件数控车工艺与编程-程序76、组合件数控车工艺与编程-加工路线---------------------------------------------本科类**1、2J550×3000双轴搅拌机设计2、800型立式沉降离心机3、ANUC21i数控车削中心电气控制分析-PLC4、BJ-130汽车变速箱二轴一二档齿轮工艺夹具及刀具设计5、BJ-130汽车变速箱壳体工艺及其夹具设计6、CK0630型数控车床设计7、EX1000高效二次风选粉机(传动及壳体部件)设计8、EX1000高效二次风选粉机(转子部件)设计9、H1105柴油机气缸三面粗镗组合机床设计(左主轴箱设计)10、JLY3809机立窑(加料及窑罩部件)设计11、JLY3809机立窑(窑体及卸料部件)12、LB2000沥青搅拌机设计13、LLC8 x 363型机立窑袋式除尘器设计14、LY3809机立窑(总体及传动部件)设计15、Q3110滚筒式抛丸清理机的设计(总装、弹丸循环及分离装置、集尘器设计) 16、Q3110滚筒式抛丸清理机的设计(总装、滚筒及传动机构设计)17、Q3110滚筒式抛丸清理机的设计(总装、抛丸器及停车装置的设计)18、S114型碾轮式混砂机的设计(混凝土)19、SF500100打散分级机回转部分及传动设计20、SF500100打散分级机内外筒体及原设计改进探讨21、SF500100打散分级机总体及机架设计22、X700涡旋式选粉机(壳体及传动部件)设计23、X700涡旋式选粉机(转子部件)设计24、YQP36预加水盘式成球机设计25、ZH1100柴油机齿轮室盖多孔钻组合机床总体及后主轴箱设计26、ZH1100柴油机齿轮室盖多孔钻组合机床总体及夹具设计27、ZH1100柴油机齿轮室盖多孔钻组合机床总体及右主轴箱设计28、ZH1100柴油机齿轮室盖多孔钻组合机床总体及左主轴箱设计29、ZH1105柴油机气缸体三面粗镗组合机床设计(后主轴箱设计)30、ZH1105柴油机气缸体三面粗镗组合机床设计(夹具设计)31、ZH1105柴油机气缸体三面粗镗组合机床设计(右主轴箱设计)32、φ1500 筒辊磨支承、喂料、卸料及导料装置设计33、半精镗及精镗气缸盖导管孔组合机床设计(夹具设计)34、柴油机齿轮室盖钻镗专机总体及夹具设计35、柴油机齿轮室盖钻镗专机总体及主轴箱设计36、柴油机气缸体顶底面粗铣组合机床总体及夹具设计37、柴油机气缸体两端面粗铣组合机床总体及夹具设计38、低速载货汽车变速器的设计39、低速载货汽车车架及悬架系统的设计40、低速载货汽车底盘总体及制动器的设计41、低速载货汽车离合器的设计。
FMC物料搬运机械手设计(全套CAD图纸)
摘要本课题是为完成车间搬运工作而设计的搬运机械手。
机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力受到人们的广泛重视和欢迎。
本课题的机械手是采用气压传动装置,PLC控制机械手,它的基本作用是从指定位置抓取工件运送到另一个指定的位置。
主要完成的是气压传动式机械手臂的结构方面设计,以及用PLC软件进行简单的控制编程设计,使机械手具备手爪张合;手部回转;手臂伸缩;手臂回转;手臂升降5个主要运动。
机械手分别采用了两个直线气缸,一个摆动气缸和滚珠丝杠来实现以上5个运动。
对于机械手准确、高效的工作是当今生产上一个具有很现实意义的课题,于是利用步进电机滚珠丝杠来控制机械手的手臂升降运动,达到了定位精度较高的效果。
关键词:机械手,PLC(可编程控制器),步进电机,滚珠丝杠副ABSTRACTThe issue is supporting the workshop designed carrying manipulator.Industrial machinery hand is the inevitable product of industrial production,which is a part of imitating human upper limb function,scheduled in accordance with the requirements of transportation tools Hold the workpiece or the operation of automation technology equipment,the realization of industrial automation,and promote the further development of industrial production plays an important role.Hence,it has strong vitality by the extensive attention of the people and welcome.This subject is adopted pneumatic transmission device robot manipulator,PLC control, basic function of it from the designated position grab workpiece to another location.The main type of mechanical arm pneumatic transmission is the structure design,and the use of PLC control software programming design,make robots have hand piece;hand again;arm expansion;turning arm;arm movements of five main movement.Robots are used for the two straight cylinder,a swing cylinder and ball screw to achieve the above five movement.For manipulator is accurate and efficient work today in a production of practical significance,and using the step-motor ball screw to control the movement of the manipulator arm positioning accuracy,high effect.Key words:manipulator,Programmable Logic Controller,step-motor,ball screw assembly目录1绪论--------------------------------------------------------------------------------------------------------------------11.1机器人的起源-----------------------------------------------------------------------------------------------11.2我国搬运机器人基本情况------------------------------------------------------------------------------11.3国外搬运机械手发展情况------------------------------------------------------------------------------21.4工业机器人发展的趋势和展望-----------------------------------------------------------------------31.5本章小结------------------------------------------------------------------------------------------------------5 2设计的总体思想------------------------------------------------------------------------------------------------62.1机械手预计达到的目标--------------------------------------------------------------------------------62.2基本结构框架----------------------------------------------------------------------------------------------62.3本章小结-----------------------------------------------------------------------------------------------------8 3机械结构的设计------------------------------------------------------------------------------------------------93.1手部抓取机构的设计------------------------------------------------------------------------------------93.2腕部旋转机构的设计-----------------------------------------------------------------------------------143.3臂部伸缩机构的设计-----------------------------------------------------------------------------------203.4手臂升降机构的设计-----------------------------------------------------------------------------------223.5机身旋转机构的设计-----------------------------------------------------------------------------------293.6本章小结----------------------------------------------------------------------------------------------------33 4气压系统的设计----------------------------------------------------------------------------------------------344.1气压传动系统工作原理--------------------------------------------------------------------------------344.2气动元件的选择-----------------------------------------------------------------------------------------344.3本章小结---------------------------------------------------------------------------------------------------35 5PLC控制机械手设计----------------------------------------------------------------------------------------365.1可编程序控制器的选择及工作过程---------------------------------------------------------------365.2可编程序控制器的使用步骤-------------------------------------------------------------------------375.3机械手可编程序控制器控制方案------------------------------------------------------------------375.4本章小结----------------------------------------------------------------------------------------------------50 6结论------------------------------------------------------------------------------------------------------------------51参考文献--------------------------------------------------------------------------------------------------------------52致谢----------------------------------------------------------------------------------------------------------------------531绪论1.1机器人的起源机器人一词的出现和世界上第一台工业机器人的问世都是近几十年的事。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
下料机械手设计摘要本文提出了机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。
本篇是按照给定的设计参数,完成了机械手的设计计算,通过计算,确定了机械手夹紧缸和升降缸的活塞直径和活塞行程及回转缸的结构尺寸、按照有关参考资料和设计任务书的要求,完成了机械手的总体布置和设计。
根据设计计算的过程,分手部,手臂伸缩,手臂回转,驱动系统,电气系统介绍了12KG 下料机械手设计过程并编写了毕业设计说明书一份。
本设计的目的是利用机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。
它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。
关键词:机械手;执行机构;驱动系统;控制系统;电气系统;CAD 制图。
Blanking Manipulator DesignAbstractThe manipulator is the industry robot important constituent, It may be called the industry robot in very many situations. The industry robot is the collection machinery, electronic, thecontrol, the computer, the sensor, the artificial intelligence and soon the multi-disciplinary advanced technology to a body modernmanufacturing industry important automation equipment. The manipulator imitates person's hand movement, according to assignsthe procedure, the path and the request realization automaticallycaptures, the transporting and the operation automatic device. It specially is in the high temperature, the high pressure, the multi-dust, flammable, explosive, radioactive and so on in the adversecircumstance, as well as is unwieldy, monotonously, in the frequentoperation replaces the person work, therefore obtains day by day thewidespread application. The manipulator generally by the implementing agency, the actuationsystem, the control system and the detector set three major part iscomposed, the intelligent manipulator also has the feeling system andthe intelligent system. This is according to the main technical specification and the requestwhich assigns, divides the hand, the arm expands and contracts, thearm rotation, the actuation system, the electrical system introducedthe 8KG yummy treats manipulator designs the process.Keywords: Manipulator Implementing agency Actuation system Control system Electrical system目录摘要 (I)ABSTRACT ............................................................................................................. I I 第一章绪论.. (1)1.1工业机械手的设计目的 (1)1.2工业机械手在生产中的作用 (1)1.3工业机械手的分类 (1)1.3.1按规格(所搬运的工件重量)分类 (1)1.3.2按功能分类 (1)1.3.3按用途分类 (2)1.4工业机械手的组成 (2)1.5工业机械手的技术发展方向 (2)1.6工业机械手的设计的内容 (3)第二章手部的设计 (4)2.1手部的功能、分类 (4)2.2夹钳式手部设计的基本要求 (4)2.3夹钳式手部的计算与分析 (5)2.3.1夹紧液压缸的计算 (5)2.3.2液压缸直径D的确定 (7)第三章手臂的设计计算 (8)3.1手臂作升降运动的液压缸驱动力计算 (8)3.1.1液压缸活塞的驱动力的计算 (8)3.2 确定液压缸的结构尺寸 (12)3.2.1液压缸内径的计算 (12)3.2.2液压缸壁厚计算 (12)3.3缸盖螺钉的计算 (13)第四章手臂回转液压缸的设计计算 (15)4.1 手臂回转时所需要的驱动力矩 (15)4.2回转缸内径D的计算 (17)4.3缸盖联接螺钉和动片联接螺钉计算 (18)4.3.1缸盖联接螺钉计算 (18)4.3.2动片与输出轴联接螺钉计算 (19)4.3.3 花键轴的设计校核 (21)4.3.4 升降液压缸和回转缸的轴承选择 (24)5.1机械手驱动系统的选择 (25)5.1.1各类驱动系统的特点 (25)5.1.2工业机械手驱动系统的选择原则 (25)5.2 液压驱动系统 (26)5.2.1液压系统传动方案的确定 (26)5.3计算和选择液压元件 (27)5.3.1液压泵 (27)5.3.2选择液压控制阀 (28)5.3.3选择液压辅助元件 (28)5.3.4拟定液压系统 (29)第六章电气控制系统 (35)6.1 电气控制系统简介 (35)6.2机械手的电气控制 (36)结论 (37)致谢 (38)参考文献 (39)第1章绪论1.1工业机械手的设计目的工业机械手设计是机械手机械制造,机械设计和机械电子工程(机电一体化)等专业的一个重要的教学环节,是学完技术基础课及有关专业课的一次专业课内容的综合设计.通过设计提高学生的机构分析与综合的能力,机械结构设计的能力,机电液一体化系统设计能力,掌握实现生产过程自动化的设计方法.通过设计把有关课程(机构分析与综合,机械原理,机械设计,液压与气压技术,自动控制理论,测试技术,数控技术,微型计算机原理及应用,自动机械设计等)中所获得的理论知识在实际中综合地加以运用,使这些知识得到巩固和发展,并使理论知识和生产密切地结合起来.工业机械手设计是机械设计及制造专业和机械电子工程专业的学生一次比较完善的机电一体化设计.通过设计,培养学生独立的机械整体设计的能力,树立正确的设计思想,掌握机电一体化机械产品设计的基本方法和步骤,为自动机械设计打下良好的基础.通过设计,使学生能熟练地应用有关参考,计算图表,手册,图册,和规范;熟悉有关国家标准和部颁标准,以完成一个工程技术人员在机械整体设计方面所必须具备的基本技能训练.1.2工业机械手在生产中的作用a .建造旋转体零件b .实习单机自动化c .锻,焊,热处理等热加工方面1.3工业机械手的分类1.3.1按规格(所搬运的工件重量)分类a .微型的搬运重量在1kg以下b .小型的搬运重量在10kg以下c .中型的搬运重量在50kg以下d .大型的搬运重量在500kg以下1.3.2按功能分类a .简易型工业机械手有固定程序和可变程序两种。
固定程序由凸轮转鼓或挡块转鼓控制,可变程序用插销板或转鼓控制来给定程序。
b .记忆再现型工业机械手这种工业机械手由人工通过示教装置领教一遍,由记忆元件把程序记录下来,以后机械手就自动按记忆的程序重法进行循环动作c .计算机数字控制的工业机械手可通过更换穿孔带或其他记忆介质来改变工业机械手的动作程序,还可以进行多机控制。
d .智能工业机械手由电子计算机通过各种传感元件等进行控制,具有视觉,热觉,触觉,行走机构等1.3.3按用途分类a .专用机械手附属于主机的,具有固定程序而无独立控制系统的机械装置。
这种机械手工作对象不变,动作固定,结构简单,使用可靠,适用于成批,大量生产的生产自动线或专机作为自动上,下料用。
b .通用机械手具有独立控制系统,程序可变,动作灵活多样的机械手。
通用机械手的工作范围大,定位精度高,通用性强,适用于工件经常变换的中,小批量自动化生产。
1.4工业机械手的组成工业机械手是由执行机构,驱动系统和控制系统所组成a 执行机构执行机构由抓取部分(手部),腕部,肩部和行走机构等运动部件组成b 驱动机构有气动,液动,电动和机械式四种形式c 控制系统有点动控制和连续控制两种方式.大多数用插销板进行点位程序控制,也有采用可编程序控制器控制,微型计算机数字控制,采用凸轮,磁盘磁带,穿孔卡等记录程序.主要控制的是坐标位置,并注意其加速度特性.d 基体(机身)基体是整个机械手的基础1.5工业机械手的技术发展方向国内外实际上使用的定位控制的机械手,没有"视觉"和"触觉"反馈.目前.世界各国正积极研制带有"视觉"和"触觉"的工业机械手,使它能对所抓取的工件进行分辨,选取所需要的工件,并正确地夹持工件,进而精确地在机器中定位,定向.为使机械手有"眼睛"去处理方位变化的工件和分辨形状不同的零件,它由视觉传感器输入三个视图方向的视觉信息,通过计算机进行图形分辨,判别是否是所要抓取的工件.为防止握力过大引起物件损坏或握力过小引起物件滑落下来,一般采用两种方法:一是检测把握物体手臂的变形,以决定适当的握力;另一种是直接检测指部与物体的滑落位移,来修正握力.因此这种机械手就具有以下几个方面的性能a .能准确地抓住方位变化的物体b .能判断对象的重量c .能自动闭开障碍物d .抓空或抓力不足是能检测出来这种具有感知能力并能对感知的信息作出反应的工业机械手称为智能机械手,它是具有发展前途的.现在,工业机械手的使用范围只限于在简单复杂的操作方面节省人力,其效益是代替人从事繁重的工作和危险的工作,在恶劣环境下尤其明显.至于在汽车工业和电子工业之类的费工的工业部门,机械手的应用情况决不能说是很好的.虽然这些工业部门工时不足的问题很尖锐,但采用机械手只限于一小部分工序.其原因之一是,工业机械手的性能还不能满足这些部门的要求,适于机械手工作的范围很小.另外经济性问题当然也很重要,采用机械手来节约人力从经济上看不一定总是合算的,然而,利用机械手或类似机械设备节省和实现生产合理化的要求,今后还会增长.1.6工业机械手的设计的内容a .拟订整体方案,特别是传感,控制方式与机械本体的有机结合的设计方案.b .根据给定的自由和技术参数选择合适的手部,腕部,肩部和机身的结构.c .各部件的设计计算d .工业机械手工作装配图的设计与绘图e .液压系统图的设计与绘图f .电气控制的绘制g .编写设计计算说明书第2章手部的设计2.1手部的功能、分类机械手的手部是用来抓取并握紧工件的,它包括手爪和夹紧装置两部分。