三次元检验培训教程 重点部分
-三次元培训讲义

7、3-2-1法建立坐标系
平面、平面、平面:按照步骤进行
1、找正,确定第一轴向 2、旋转到轴线,确定第二轴向 3、平移,确定三个轴向的零点。 粗建坐标系 验证坐标系CTRL+W 精建坐标系 验证坐标系 注意选择工作平面 平面、圆、圆
平面、直线、点
30
9、自动测量没有CAD模型的特征元素
建立坐标系前的准备:
对照工件,分析图纸,明确以下要求: 一、明确工件的设计基准、工艺基准、检测基准,确定建立 零件坐标系时,应测量哪些元素来建立基准,并采用何种建 立坐标系方法。 二、确定需要检测的项目,应该测量哪些元素,以及测量这 些元素时,大致的先后顺序。 三、根据要测量的特征元素,确定工件合理的摆放方位,采 用合适的夹具,并保证尽可能一次装夹,完成所有元素的测 量,避免二次装夹。 四、根据工件的摆放方位及检测元素,选择合适的测头组件 ,并确定需要的测头角度。 工件图纸的分析过程,是工件检测的基础。分析完图纸后,应出 据一份详细的检测要求。
2、测点分布原则: 测量时,最大包容被测元素的有效范围。
3、测量二维元素时,需要选择工作平面。例Z正
在 PC-DMIS中, 当在测量二维元素、计算2D距离时,工作平面的 选择非常重要。定义有效的工作平面是非常重要的。
直线
圆
24
6、手动测量特征元素
元素类型 点 直线 至少测量点数及注意事项 P48 1 确认采点方向基本与工件表面垂直 2 注意工作平面的选择,直线将投影到工作平面方向,测量时的顺序非常
PRINT :编程时加 MOVE 点按键。
PROBE ENABLE(1) 当此按键灯灭时,测头保护的 功能有效,但不记录测需要正常测点时,将灯按亮点 需要正常测点时,灯亮(2)测头平衡,模拟测头
三次元培训

椭圆 圆柱 连接 要素 坐标 系统 探针
PN AN TO LP
投影 面
DI
计算 距离 记忆 呼出 点的 距离 程序 输入 复制 元素
IN ED DE PP
相交 程序 结束 图像 放大 补偿 点 时间 显示
角度 MR 公差 计算 探针 数据 坐标 转换
SD LM
CR 圆
CO
圆锥
DP SY
CM CP
KI
TI RS
SP 球
分中
转换 RM 测头
调出 程序
清除 荧屏
六、三次元基准建立及简单测量
1பைடு நூலகம்探针直径校正
①输入DP 2 ②对标准球测量五点(顶点一点、截面大圆测量四点) ③屏幕显示探针直径(标准探针直径相差太大则需要重新校准
2.坐标建立
①将工件擦拭干净于花岗岩平台上固定 ②选一个面为坐标基准面(投影面)
三、三次元的基础知识(开、关机)
1开启程序 ①接通气源将气压调至适当压力(3~4kg f/cm平方) ②按下POWER开关,接通三座标电源 ③打开电脑电源开关及屏幕显示开关 ④输入GEOPAK调出测量软件 ⑤进入测量系统 ⑥调出探针数据或重新校正 ⑦进行测量
三、三次元的基础知识(开、关机)
2.退出程序 ①退出GEOPAK测量软件 ②输入RS清除荧屏 ③输入EX退出软件 ④可关机
六、三次元基准建立及简单测量
6.坐标系 CS CS3 轴设置 CS4 轴补偿设置 CS5 面补偿设置 CS6 旋转坐标系 CS7 提取坐标系 CS8 保存坐标系 CS9 退出
谢 谢!
三次元培训
课程结构
一、三次元的定义、优点 二、三次元的保养 三、三次元的基础知识(开、关机) 四、三次元操作注意事项 五、三次元指令代号表 六、三次元基准建立及简单测量
蔡司全自动三次元培训教材

笛卡尔坐标 圆柱坐柱 球坐标
坐 标 系
二、附加坐标系
资源→其它→坐标系 附加坐标系和基本 坐标系可以是相互独 立的坐标系,也可以 只在原有的基本坐标 系之上修改需要的相 关参数。
坐 标 系
三、元素坐标系
每个元素都有其自身坐标系,不同的元素其坐 标系不一样。
四、机器坐标系
系统在默认状态下会有自己的坐标系,其原点 在左上角。
曲 线 知 识
三、策略和评定
策略主要用于选择 曲线的获取方式
评定主要用于曲线 获取后的计算方法
曲线策略
曲线评定
曲 线 知 识
四、曲线输出
轮廓度 Sat曲线实体 曲线实体 ASCII文件 文件
硬 件 知 识
一、硬件
机器型号: 机器型号: CONTURA G2 机器坐标系及零点 量程: 量程:700*1000*600 最大载重量: 最大载重量:720公斤 公斤 精度: 精度:0.0018mm
元 素 采 集
定义:元素具有规则的几何形状, 定义:元素具有规则的几何形状,以不同的 方式定义,可以用测量机测量. 方式定义,可以用测量机测量. 通常我们这台机器有以下三种采集的方法
自动识别元素 构造元素 从模型上采集元素
元 素 采 集
一、自动识别元素
1 2
可以通过探针 打点自动获得的 元素。 元素。 注意每个元素 的合理打点数。 的合理打点数。
8 9
3 4
10
5 6 7
常用的测量元素 有如右图1~10 有如右图
元 素 采 集
二、构造元素
无法通过直接测量识别,需要用已测量的元素构造而成。 无法通过直接测量识别,需要用已测量的元素构造而成。
常见的构造元素
蔡司全自动三次元培训教材 共36页PPT资料

一、基本尺寸输出
基本输出
角度输出
距离输出
特性输出
二、形位公差输出
形状输出
位置输出
CNC 编 程
一、编程步骤
1. 建立工件坐标系 2. 建立安全平面 3. 采集测量元素 4. 元素策略及评定设置 5. 输出测量特性 6. 安全五项检查
a) 安全平面 b) 安全距离 c) 回退距离 d) 探针组的设定 e) 探针的设定
四、简单维护
每日酒精清理导轨 导轨上不能摆放物品 不要挤压导轨
Thanks!!!
Thank you
自动探针更换
备注:库位的定义添加需要 用主探针进行
探针系统
五、手动校动探针
主探针校准 工作探针校准 探针被动校准 探针几何再校准
备注:
校准判断 主探针 s<=0.0005mm 工作探针 s<=0.001mm
手动校准探针
探针系统
六、自动校准探针
新建程序 建立机器坐标系 增加“探针校准”特性 选择校准的探针 定义“缺省输出报告”
元素采集
二、构造元素
无法通过直接测量识别,需要用已测量的元素构造而成。
常见的构造元素
• 3D直线 • 相交 • 对称 • 最大最小结果
备注:常用的椭圆,圆槽,方槽,圆环最好不要自动识别, 当然有时也不能,测量时需要注意探测策略。
元素采集
从模型上采集元素 常用的:
1. 定义点 2. 在圆柱上定义圆
输出报告设置
1.报告格式修改
2.报告表头修改 3.报告保存路径修改
用户输出格式
紧凑报告格式
缺省报告格式
探针系统
探针校准目的 探头介绍 手动装卸探针 自动装卸探针 手动校准探针 自动校准探针
三次元检验培训教程重点部分
2)工件的实际定位
定位元件的种类:
支承钉;支承板,长销,短销,长V形块, 短V形块,长定位套,短定位套,固定锥销,
浮动锥销等。
注意:定位元件所限制的自由度与其大小、 长度、数量及其组合有关
长短关系、大小关系、数量关系、组合关系
表 1-10 典型定位元件的定位分析
工件的 定位面
定位情况
夹具的定位元件
矢量
矢量可以被看做一个单位长的直线,并指向矢量方向。 相对于三个轴的方向矢量。I方向在X轴,J方向在Y轴,K方 向在Z轴。矢量I、J、K值介于1和-1之间,分别表示与X、Y、 Z夹角的余弦。
+K
K Z Y +J
J I
X +I
矢量方向
矢量用一条末端带箭头的直线表示,箭头表示了它的 方向。X、Y、Z表示三坐标测量机的坐标位置,矢量I、J、 K表示了三坐标测量机三轴正确的测量方向。
一致。
6)定位中存在问题
➢ ⑴欠定位:工件定位时,应该限制的自由度没 有被全部限制的定位。实际不允许发生。
图2.7加工槽,有尺 寸A和B的要求
⑵过定位(重复定位):工件定位时,几个定位 元件重复限制工件同一自由度的定位。
如下2.7图,位于同一平面内的四个定位 支承钉限制了三个自由度。
不允许:如果工件的定位面为没 有经过机械加工的毛坯面,或虽 经过了机械加工、但仍然很粗糙, 这时过定位是不允许的。
xx yyzz
槽宽由定尺寸刀具保证
综合结果: 必须限制五个自由度
xxy z z
注意问题
1)定位元件限制自由度的作用表示它与工件 定位面接触,一旦脱开就失去限制自由度的作 用。
2)在分析定位元件起定位作用时不考虑外力 影响,即要分清定位和夹紧的区别。
初级三次元培训教程

初级三次元培训教程在当今科技飞速发展的时代,三次元技术在众多领域都发挥着重要作用,如制造业、医疗、设计等等。
对于初学者来说,掌握三次元技术的基础知识和操作方法是踏入这个领域的第一步。
接下来,就让我们一起开启初级三次元培训的学习之旅。
一、三次元的基本概念三次元,又称为三坐标测量机,是一种能够对物体的几何形状、尺寸和位置进行高精度测量的设备。
它通过三个相互垂直的坐标轴(X、Y、Z)来确定测量点的空间位置,并将测量数据进行处理和分析,以获得物体的各种参数。
三次元测量机的工作原理基于笛卡尔坐标系。
测量时,探头接触被测物体表面,获取测量点的坐标值。
这些坐标值经过计算机处理后,可以生成物体的三维模型、尺寸报告等。
二、三次元测量机的组成1、主机主机是三次元测量机的主体部分,包括框架、导轨、工作台等。
框架通常采用高精度的花岗岩或铝合金材料,以保证机器的稳定性和精度。
导轨则负责引导探头在三个坐标轴上的运动,确保测量的准确性。
2、探头系统探头是测量机与被测物体直接接触的部分,其类型有接触式探头和非接触式探头。
接触式探头通过与物体表面接触来获取测量点的坐标,常见的有触发式探头和扫描式探头。
非接触式探头则利用光学、激光等技术进行测量,如激光扫描探头。
3、控制系统控制系统负责控制测量机的运动、数据采集和处理等工作。
它通常由计算机、运动控制卡和相关软件组成。
4、测量软件测量软件是三次元测量机的核心部分,它不仅能够控制测量过程,还能对测量数据进行处理、分析和输出。
优秀的测量软件具有操作简单、功能强大、精度高等特点。
三、三次元测量机的操作步骤1、开机前的准备在开机前,需要确保测量机的工作环境符合要求,温度、湿度在规定范围内,并且周围没有振动和干扰源。
同时,检查机器的外观是否有损伤,各部件是否连接正常。
2、开机与初始化打开测量机的电源,等待机器完成自检和初始化。
在初始化过程中,测量机会对坐标轴进行回零操作,以确定测量的基准点。
3、建立坐标系坐标系是测量的基础,根据被测物体的特点和测量要求,选择合适的坐标系建立方法,如3-2-1法、迭代法等。
三次元培训资料
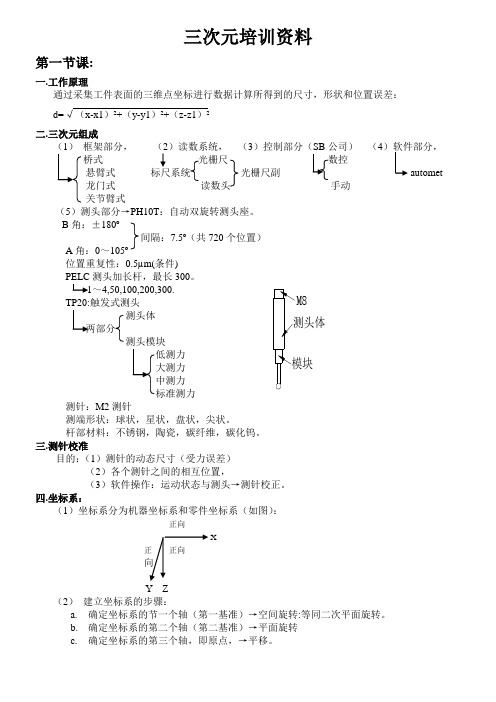
块头体M8三次元培训资料第一节课:一.工作原理通过采集工件表面的三维点坐标进行数据计算所得到的尺寸,形状和位置误差:d=√(x-x1)²+(y-y1)²+(z-z1)²二.三次元组成框架部分,(2)读数系统,(3)控制部分(SB 公司) (4桥式悬臂式 标尺系统 光栅尺副 automet 龙门式 读数头 手动 关节臂式(5)测头部分→PH10T :自动双旋转测头座。
B 角:±180º间隔:7.5º(共720个位置) A 角:0~105º 位置重复性:0.5µm(条件)测头加长杆,最长300。
~4,50,100,200,300.测头体两部分测针:M2测针测端形状:球状,星状,盘状,尖状。
杆部材料:不锈钢,陶瓷,碳纤维,碳化钨。
三.测针校准目的:(1)测针的动态尺寸(受力误差)(2)各个测针之间的相互位置,(3)软件操作:运动状态与测头→测针校正。
四.坐标系:(1)坐标系分为机器坐标系和零件坐标系(如图):正向X正 正向向Y Z(2) 建立坐标系的步骤:a. 确定坐标系的节一个轴(第一基准)→空间旋转:等同二次平面旋转。
b. 确定坐标系的第二个轴(第二基准)→平面旋转c. 确定坐标系的第三个轴,即原点,→平移。
第二节课:一.基本几何元素:1.点元素:点、圆、球、椭圆。
2.线元素:线、圆柱、圆锥(方向性元素)。
3.面元素:面(方向性元素)。
应用基本几何元素:组合元素(功能)组成8个基本几何元素注意:测点不可以组合基本几何元素,只能通过几何元素基本点。
第三节课:一.相关功能:距离、角度、相交、对称、镜像、垂足;点线线线线线→点1、距离点面2、角度线面3、相交线面→点线线面面面面→线线面点点→点点线→点线线→线线线→点点面→点4、对称点点→点5、垂直6、镜像线线→线面面→面点面→点线面→线二.投影功能:xy→z=0 →z=0xz→y=0 点xz→y=0 线x、y、z轴1、点投影到yz→x=0 2、线投影到yz→x=0 3、提取特殊几何元素任意面xy、xz、yz轴三.形状误差:1、母线采点→平面直线度→平行平面→操作 2、连直线3、选择投影面141、采若干个正截面作圆→空间直线度→圆柱→操作 2、每个圆转换成中心点3 42、平面度: 圆度 直接测量得出读数 3、圆柱度a) 采点至少8点,最多40点b) 作成圆柱 ←4点 c) 点圆柱度按健 ←4点第四节课:一、位置误差: 圆柱(线对线)∥ 线对线 1.首先检测基准要素 平行度 平行平面(线对线) 1、定向误差 ⊥ 线对面 操作 2.然后检测被测要素 ∠ 面对线 3.点击相应∥/⊥/∠按钮 垂直度面对面 线对面顷斜度 平行平面注:基准要素无要求,但被测要素却不能由组合功能得到的元素只能由测量点构成的元素 ◎ 2、定位误差同心度⊙基准被测点元素 a.同轴度◎ 轴线长短决定同轴度◎,基准是线元素,被测是圆柱 同心度操作步骤:①选择投影面②基准要素③被测要素④点击“⊙” 同轴度操作步骤:①基准要素②被测要素→圆柱③点击“◎”b.对称度:面对面→操作步骤:①基准要素②被测要素③另一个被测要素④点击“ ” 采点要对应。
三次元培训教程(一)2024

三次元培训教程(一)引言概述:本文是关于三次元培训教程(一)的文档。
三次元培训教程旨在帮助学员全面了解三次元技术的基础知识和应用实践。
本文将从五个大点展开介绍,包括三次元技术概述、三次元建模基础、三次元渲染技术、三次元动画制作和三次元应用案例等。
通过这些内容的学习,读者将能够掌握三次元技术的核心概念和应用方法,并能够在实践中灵活运用。
正文:一、三次元技术概述1. 三次元技术的定义和发展历程2. 三次元技术在电影、游戏和虚拟现实等领域的应用3. 三次元技术的核心原理和关键技术要点4. 三次元技术与传统二维技术的比较和区别5. 三次元技术的未来发展趋势和前景二、三次元建模基础1. 三次元建模的基本概念和原则2. 三次元建模软件的选择和使用3. 三次元建模的基本技术和步骤4. 三次元建模的常见问题及解决方法5. 三次元建模实例分析和实践操作指导三、三次元渲染技术1. 三次元渲染的基本原理和技术框架2. 三次元渲染的光影效果和纹理贴图技术3. 三次元渲染的渲染器选择和参数设置4. 三次元渲染中的渲染优化和效率提升策略5. 三次元渲染实例分析和渲染效果调优指南四、三次元动画制作1. 三次元动画制作的基本流程和技术要素2. 三次元动画制作软件的选择和使用3. 三次元动画的关键帧设计和插值技术4. 三次元动画的角色建模和动作捕捉技术5. 三次元动画的渲染和后期制作技巧五、三次元应用案例1. 三次元技术在电影制作中的应用案例2. 三次元技术在游戏开发中的应用案例3. 三次元技术在虚拟现实领域的应用案例4. 三次元技术在建筑设计中的应用案例5. 三次元技术在教育培训中的应用案例总结:通过本文的介绍,我们了解了三次元培训教程(一)的内容架构和学习目标。
本教程共分为五个大点,包括三次元技术概述、三次元建模基础、三次元渲染技术、三次元动画制作和三次元应用案例等。
每个大点下包含了5-9个小点,涵盖了三次元技术的核心知识和应用实践。
海克斯康三次元培训资料

三次元操作手册目录简介1.PC-DMIS 3.7MR2 ------------------------22.创建一个新的测量程序--------------------------3测头校正方法及步骤3.-----------------------------44.添加测头--------------------------------------------5--------------------------------------5.配置校验参数66.坐标系建立方法-----------------------------------77.测量注意事项97----------------------------------8.基本图标的测量方法-------------------------119.坐标系建立方法12 9-------------------------------10.最优拟合状态----------------------------------1711.移动设备位置测量方法--------------------18 11“移动设备位置”测量方法PC-DMIS37MR2PC-DMIS 3.7MR2 简介PC-DMIS3.7MR2作为PC-DMIS3.5的升级版本,在加强了PC-DMIS3.5版本的功能的基础上,从用户的使用角度出发,添加了系列实用的新功能。
上,从用户的使用角度出发,添加了一系列实用的新功能。
1 、校验测头增加半自动和自动测量;2、测量特征的图示化路径显示;3、图形窗口可直接删除测点;图形窗口可直接删除测点;4、提供一个工具箱可调整CAD照明方向及CAD模型所需的剖面视图;5、在CAD模型上快速进行零件装夹在模拟。
创建一个新的测量程序创建个新的测量程序步骤:(1)、双击PC-DMIS 桌面快捷键打开PC-DMIS 程序。
还可以选择“开始”按钮打开PC-DMIS,然后依此选择程序| PC-DMIS For Windows | online。
三次元培训教材

影视制作案例
影视制作案例
在影视制作中,三次元技术可以用于 特效制作、场景搭建、道具设计等方 面,提高电影或电视剧的视觉效果 模技术,将实物道具转化为数字模型, 进行特效制作和场景合成,打造出更 加震撼的视觉效果。
07
总结与展望
总结
教材内容丰富
本教材涵盖了三次元领域的多个 方面,包括基础知识、技能提升、 案例分析等,为学习者提供了全
面的学习资源。
实践性强
教材注重实践应用,通过丰富的 实例和案例分析,帮助学习者掌 握实际操作技能,提高解决实际
问题的能力。
结构清晰
教材结构清晰,层次分明,便于 学习者系统地掌握知识体系,提
高学习效率。
未来发展方向
更新内容
随着三次元技术的不断发展,教材内容需要不断更新和完善,以 反映最新的技术和趋势。
总结词
市面上有许多三次元软件可供选择,如Maya、3ds Max、Blender等。
详细描述
Maya是一款专业的三维动画软件,功能强大,广泛应用于电影、游戏和广告行业。3ds Max是一款面向建筑师 和设计师的三维渲染和建模软件,适用于创建室内设计和建筑可视化效果。Blender是一款开源的三次元软件, 适合初学者和小型制作团队使用。
渲染概念
渲染是利用计算机图形学和图 像处理技术,将三维模型转换 成二维图像的过程。
渲染流程
包括几何、光照、纹理、渲染 等步骤,其中光照是渲染中的 核心部分。
渲染器类型
分为扫描线渲染器、光线追踪 渲染器和全局光照渲染器等。
高级渲染技术
01
02
03
光线追踪
利用光的折射、反射和漫 反射等特性,模拟真实的 光照效果,提高图像质量。
三次元(C-MM)操作指导书(TL)

21
中山东茗影音电子有限公司
版本 变更次 管理编号 页码
A版 0次 QPI303 1/8
22
TOMEI QA PQC 二次元 操作指导书
资料构成 1、封面 2、开机顺序 3、关机及注意事项 4、检测操作 合计
页数 1 1 1 4 7
初版作成、日期 2003.02.09 2003.02.09 2003.02.09 2003.02.09
打印标题 S/C
键,显示屏变成以下第 9 步的
状态
[SET]
PRINT DATE S/C? (打印日期 S/C)
[SET] [SET]
DATE?
YY/MM/DD= / / / PRINT DATE S/C? (打印名字 S/C)
准备输入检查日期年/月/日
输入操作员名(名字不超过 16 个字)
[8] [6] [1] [0] [2] [0] [SET] [T] [O] [M] [SET] [C]
NAME? PRINT PART NO.S/C/ INDEX NO.S/C?
输入操作员名 是否需要部品编号 [C]代表没有打印编号
[C]
COVNTER TEST
[C]代表没有打印索引编号
PUSH COMMAND
三、装纸(注意纸的正M反O需DE分K清E)Y(把推纸指放令在或装方纸处系,统按准P备ap指er令F/E方ED式K设e定y 键 式键)
3.打开冷气机,设定温度为 20℃,保持室温在 20℃±5℃。
二、 开机
总电源
黑色电源 箱
稳压器
压缩空气 箱
主机空气 阀
主机开关
(调至压力表 0.4)
电脑主机
按下导轨气阀
显示器 选择 01
三次元特殊测针的通途和校验方法1资料

二、5方向测针的用途 及校验方法
用途: 用于检测零
件内腔、深孔。
二、5方向测针的用途 及校验方法
关于针的顺序方向
装针时尽量与坐标轴平齐 空连接1指向Z空连接2指向X+ 空连接3指向Y+ 空连接4指向X空连接5指向Y-
二、5方向测针的用途 及校验方法
TESASTAR-M 测座 TESA-TMA 转接 TESASTAR-P 传感器 EXTEN30MM 加长杆 PS22r_25BY3MMDISK 测尖1
TIP3BY20MM ; 测尖2
注意:
·在校验盘形测针之前,先校一个普通的球测针,目的是 为了得到标准球的位置。然后再进行盘形测针的校验。 ·使用时,通常使用20mm加长杆; ·配置测头文件时,选择测杆要注意后缀为“DISK” ·由于盘形测针是球形测针的特例(切掉了两个球冠), 工作面为球环的球面,不能垂直于标准球正上方采点;因 此,在校验时,盘形测针不能手动在标准球顶部采第一点, 所以,自动校验测量时,选择“是否已经移动标定工具或 更改坐标测量机零点?”时只能选择“否”;
四、盘形测针的用途 及校验方法
———上机演示
谢谢各位
本课结束
空连接3 :TIPSTAR2BY30_TESA (指向X-)
空连接4 :TIPSTAR2BY30_TESA (指向Y-)
注意:
1、使用时,通常使用20mm加长杆; 2、每添加一个角度,5个测尖同时添加此角度,若不采用某测尖的此角
度,可删除。 3、安装时,尽量保证2、3、4、5号测针中两相对两测针连线与“X”轴或“Y”
郑州科技学院 电子工程系
王志义 2015年8月1日
三坐标 培训教程 ppt课件

ppt课件
5
直角坐标系
ppt课件
6
直角坐标系
直角坐标系
Z Microval
MicroXcel & Xcel Machine 坐标轴规定
Y
Older Mistral
Z
Scirocco & Typhoon Machine
坐标轴规定
Y
X X
ppt课件
7
2.2.三坐标测量原理
几何量测量是以点的坐标位置为基础的,它分 为一维、二维和三维测量。坐标测量机是一种 几何量测量仪器,它的基本原理是将被测零件 放入它容许的测量空间,精密地测出被测零件 在X、Y、Z三个坐标位置的数值,根据这些点 的数值经过计算机数据处理,拟合形成测量元 素,如圆、球、圆柱、圆锥、曲面等,经过数 学计算得出形状、位置公差及其他几何量数据 。
23
二. 控制系统(控制柜)
ppt课件
24
5.活动桥式测量机的构成和及功能
三. 测头系统是数据采集的传感系统,测座 分为手动和自动两种..
一般有四部分组成, 1.测座2转接器,3传感 器 4. 测杆
ppt课件
25
典型的几种测头(手动)
MH8(手动分度测座):
紧凑的可分度测座,专为小型手动测量机设计
3. 锁定/解开特性,便于实现定位并解除了不
必要的磨损
4. 便于读取的刻度显示,可快速重定位到校
正过的位置
5. 最大加载:EM2 TP20加长75mm(MIP
60mm)
6. 自重:210g(不包括shank)
ppt课件
27
典型的几种测头(自动)
PH10M/PH10MQ/H属于功能 强大的分度机动测座,能够携带 长加长杆和各种测头。具备高度 可重复性的动态连接,允许快速 的测头或加长杆更换而不需要重 新校正。
三次元操作培训课件
Min/Max: 最小最大: 坐标系将尝试确 定零件的方位, 使所有输入特征处于 根据其关联尺寸确定的公差範围內, 此选项仅用于2D最佳擬合.
Rotate & Translate: 旋转和平移: 在 計算坐标系时将允許最大的自由度, 使其可以自由地旋转和平移.
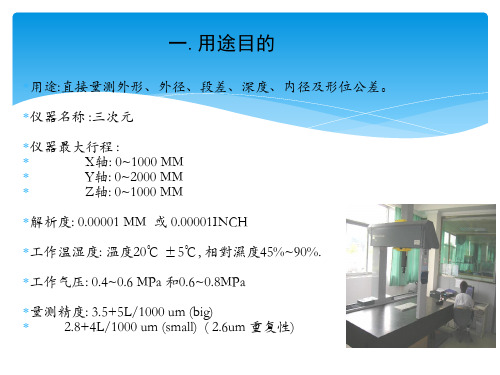
量测精度: 3.5+5L/1000 um (big) 2.8+4L/1000 um (small) ( 2.6um 重复性)
标准球
二.结构介绍
紧急停止 手/自动 总电源
按钮
切换开关 开关
气压表
二.控制合
手柄
速度控制 三轴锁定 紧急停止 连机加电
组合功能 完成 空点 测针补尝
删除点
三.步骤
一. 测头校验 测头对话框基本內容 测针定义 柱形针定义及校验 盘形测针定义及校验 星型测针定义及校验 五方向测针定义及校验
面转向下一个激活平面时要通过的
面. Axis------指通过平面的法向矢量. 在 使用时Plus与Minus对后面的Value 指定的值沒有正負影响. Value------通过平面相对坐标系的值. 当通过平面与激活平面选择同样的
矢量时, 此处的值无效, 而以激活
平面的值为准.
3. 安全面设定实例1
二. 坐标系建立 2. 迭代法坐标系建立原理及方法
无CAD模型时迭代法坐标系的建立
如果沒有CAD模型, 创建的元素必须正确输入其理论值, 其坐标系建立方法与有CAD模型的建 立方法一致!
二. 坐标系建立
3. 最佳擬合坐标系建立原理及方法
用途与原理:
此方法可提高坐标系精度, 特別是对于曲线曲面类零件, 通过理论曲线和实际曲线的匹配得 到更精确的坐标系. 常用于有CAD模型的情況. 如下图所示, 该零件沒有任何可用于测量的元 素, 只能用最佳擬合坐标系建立方法建立坐标系.
2024年三次元培训教程
三次元培训教程引言:随着科技的不断发展,三次元技术已经逐渐成为各个领域的重要组成部分。
为了帮助大家更好地了解和应用三次元技术,我们特此推出本教程,通过系统的培训,让您掌握三次元技术的核心知识和应用技巧。
第一章:三次元技术概述1.1三次元技术的定义三次元技术,又称三维技术,是指通过计算机技术对三维空间进行建模、渲染、动画等处理,从而实现虚拟现实、增强现实、三维打印等功能的技术。
1.2三次元技术的应用领域三次元技术广泛应用于工业设计、建筑设计、影视动画、游戏开发、虚拟现实、医疗仿真、教育等领域。
1.3三次元技术的发展趋势随着科技的不断进步,三次元技术将更加智能化、自动化、普及化,其应用领域也将进一步扩大。
第二章:三次元建模技术2.1三次元建模的概念三次元建模是指通过计算机软件创建三维模型的过程,包括几何建模、纹理映射、光照渲染等步骤。
2.2常用的三次元建模软件常用的三次元建模软件有AutodeskMaya、3dsMax、Blender、ZBrush等。
2.3三次元建模的基本流程(1)确定建模目标(2)收集参考资料(3)创建基础模型(4)细化模型(5)纹理映射(6)光照渲染第三章:三次元渲染技术3.1三次元渲染的概念三次元渲染是指将三维模型转换为二维图像的过程,包括光线追踪、阴影、反射折射等效果。
3.2常用的三次元渲染软件常用的三次元渲染软件有V-Ray、Arnold、Corona、mentalray 等。
3.3三次元渲染的基本流程(1)设置渲染器(2)调整材质和灯光(3)设置渲染参数(4)渲染输出第四章:三次元动画技术4.1三次元动画的概念三次元动画是指通过计算机软件创建三维动画的过程,包括角色动画、场景动画、特效动画等。
4.2常用的三次元动画软件常用的三次元动画软件有AutodeskMaya、3dsMax、Blender 等。
4.3三次元动画的基本流程(1)确定动画目标(2)创建动画模型(3)设置关键帧(4)调整动画曲线(5)渲染输出第五章:三次元技术的应用实例5.1工业设计领域通过三次元技术,设计师可以快速创建和修改产品模型,提高设计效率。
三次元培训教材

三次元测量步骤:1打开操作软件;校针(测头)+校夹具打开软件PC——文件——打开——计算机——G盘——程序——测量模板——黄生EROWA——打开;光标停在启动加载测头——F9——选中TIAOBO——测量——测量——否——确定——确定——结果——下拉(0.003之内可接受)——确定——确定;光标停在平面1——执行——从光标处开始(光面朝外摆放)——平面4点后按√——侧面2点后按√——圆柱上4点后按√(从正面开始)——下拉——文件——保存——关闭;2测量产品:夹具分中看产品模号——找相应邮件打开——(NX)文件——导出——IGES——确定(继续)(PC)文件——另存为(有此模号文件夹的,直接选择本模号保存,无此模号的,新建文件夹;)——查看编辑窗口,核对模号——删除编辑窗口中上一模号内容,删除至A1坐标系/终止;——文件——导入——IGES——选择——处理——确定;点自动——矢量点(测量安全平面值,点产品最高点,点数大于10即可)——插入——参数设置——安全平面——Z值填入——激活——应用——确定;矢量点(打基准:四周+平面上面打点;从正面开始)——创建(END);打基准以外的点——创建(END)——关闭——文件——保存;【测量同一模号产品,从此步骤开始】光标停在点1——右键执行——从光标处执行——平面上打1点——按√——文件——保存;下拉——点位置——选中点(点1不用选)——XYZ取消——点显示——创建——关闭——排位——截图3制作报告:桌面——报告样本——文件——另存为(所测量模号)——输入模号、火花位、日期、粘贴截图;——保存原始测量:直接放上面打开软件PC——文件——打开——计算机——G盘——程序——测量模板——四面分中——文件——另存——(接下来一样)光标停在A2坐标系/终止,删除终止以下内容——导入(接下来一样)——打完点后光标停在平面1开始执行——手动操作面上4点后按√——手动操作线2点按√(4次)——文件——保存(接下来一样)改针:光标停在加载测头——选1(长针)MBS ±0.05MJM ±0.02室温20±2℃湿度30%—70%不能同时开始两个程序;撞针到某一点,可选择删除,光标需停在安全平面处开始执行;测量过的产品直接(PC)文件——打开——:未测量过的产品文件——另存为——。
初级三次元培训教程

初级三次元培训教程初级三次元培训教程是一门涵盖三维设计、建模和动画等多个方面的技能训练课程,亦是数字娱乐产业的必备知识。
通过初级三次元培训,学生能够学习并掌握从基础概念到常用技巧的知识体系,为进一步深入学习和应用打下坚实的基础。
初级三次元培训课程的开设目标是帮助学员掌握3D设计、建模、动画制作和特效等方面的基本技能,培养学员成为三次元设计、制作和展示方面的专才。
课程内容涵盖了三次元建模和渲染、虚拟现实技术、运动学基础、人物建模、特效技术和音频制作等多个方面,提升了学员的视觉与创造力,让学员能够灵活运用所学知识创作出独具特色的作品。
初级三次元培训的学习顺序一般是先从3D建模和渲染着手,以此帮助学员理解3D空间的概念和具备三维构造的能力。
在掌握基本的建模技巧和场景渲染插件使用后,学生将进一步深入学习虚拟现实的技术和运动学基础,掌握人物建模技巧和动画技术,并学会应用特效技术和音频制作工具,从而能够制作出更加具有表现力和真实感的作品。
初级三次元培训的考核主要体现在学生的作品制作和表现能力上。
学员在培训结束后将会被要求提交课程作业,包括场景渲染、建模和动画制作等多个方面的作品,并且需要在演示中展示出对关键技术的掌握和创意表现的能力。
学习期间,需要学员根据需要自行搜索相关教程和资料,并通过练习来不断提高自己的技能。
初级三次元培训的知识体系和学习过程是相对复杂的,上课期间需要老师和学生共同努力来解决各种难点问题。
但不管是在学习方法、学习理念还是在作品制作方面都需要学生掌握学习方法和创作技巧,才能够真正发挥出自己的才华和创造力。
为此,初级三次元培训的教师也需要具备深厚的理论和实践经验或能够掌握当前领域的前沿技术,从而更好地发挥教育和培训的作用,促进学生的发展和成长。
总的来说,初级三次元培训教程是适合想要学习数字娱乐产业技能的初学者们的专业课程。
虽然需要投入大量的时间和精力,但是最终将会为学生打开一扇门,让他们掌握全新的数字创意技能,并在数字娱乐产业领域有所建树。
DuraMAX三次元使用培训报告
第9步 ①鼠标“左键”选择空余库位,“右键”打开库位 编辑栏,点击“定义库位”;
附件1-11
第10步 ①移动测针至库位凹点正上方位置; ②点击“确定”;
第11步 ①点击“为库位设置探针”;
②选择标准探针名称;
③点击“确定”; ①
第12步
①依照第11步的方法,依次为另外两个库位设置 探针,完成探针库位校正; ②自动从库位上更换探针:移动测头到安全位置, 鼠标“左键”点击需要取出探针的库位,“右 键”打开库位编辑栏,点击“从库位安装探针” 即可。
4、探针库位校正步骤:(探针库位就是自动更换测针时,放置测针支架的位置) 第1步 ①执行《设备测针校正步骤》第1至3步骤将标准探针安装 在设备上: ②点击“自动更换探针”;
自动更换探针
附件1-9
第2步 ①将需要使用的探针安装在库位上(安装两个,空余一 个为标准针库位);
一个凹点位置向外放置
第3步 ①点击“添加库位”;
注:“START”灯亮即可; 第6步 ①打开电脑开关,进入桌面后双击软件图标“CALYPSO5.4”;
第7步
①输入用户名以及密码,点击“确定”,若无 密码限制,则直接点击“确定”; ②移动测头到安全位置,点击“确定”,执行 初始化动作;
①
② 第8步 ①进入软件初期画面,完成开机动作。
附件1-3
型号的设备,故未能对“曲线”课程进行培训;待下MGC的设备购回后,厂家会安排上门进行培训;
六、DuraMAX设备的特点及与MGC现用SVA800A的差异:
区分
DuraMAX
SVA800A
1、设备软件系统为:Calyposo 5.4(带有中文版);
2、主体部件生产厂家为:德国蔡司;
3、探头VAST-XXT:带有扫描式、触发式测量;
三次元座标量测仪培训教材
12.環閉橋架型(Ring bridge type)
—由於它的驅動方式在工作台中
心,可減少因橋架移動與造成 的衝擊,為所有三次元量床中 最穩定的一種。
Precision Metrology Lab.
NTU Ring Bridge CMM
Y-Laser
Z-Laser
X-Drive
單支柱移動型movingtablecantileverarmtypecantileverarmtype支柱整體沿水平面導槽在y軸上?測台沿水平面的導槽移動?測台沿水平面的導槽柱等具有?好剛性因此變形柱等具有?好剛性因此變形測軸較接近以符合阿貝定?
三次元座標量測儀
注塑技术网
接觸式探頭介紹
Precision Metrology Lab.
三次元量測儀之探頭
1.機械式探頭
機械式探頭種類繁 多,常用探頭包括 球形、錐形、圓柱 形及萬能形等。
Precision Metrology Lab.
2. 觸發式探頭
無論在任何位置方 向,只要其探針偏 離中心位置至某一 程度時,立即會產 生一個檢測信號。
—支柱整體沿水平面導槽在y軸上
移動,量測台沿水平面的導槽 在x軸上移動,此型量測臺、支 柱等具有良好剛性,因此變形 少,且各軸之線性刻度尺與量 測軸較接近,以符合阿貝定 理。
Precision Metrology Lab.
8.單支柱xy量測台移動型(Single column xy table type)
•滾子軸承導軌
滾子軸承導引的精度是依據軸 承的偏擺程度與導引表面真直 度而定。因此三次元量測儀需 要應用精度較高的滾子軸承, 有需較厚的外環,以承受較大 的荷重。優點為不需具備氣壓 源,體積較小、可得較大剛性 和較高精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5)从上面几例分析总结可知:
①工件在夹具中定位,可以归结为在空间直角坐标系中用 定位元件限制工件自由度的方法来分析; ②工件定位时,应限制的自由度数目,主要由工件工序加 工要求确定; ③一般讲,工件定位所选定位元件限制自由度的数目充其 量≯6; ④各定位元件限制的自由度原则上不允许重复或干涉(见 下面相关内容分析); ⑤限制了理论上应该限制的自由度,使一批工件定位位置
Plan
Do
三次元培训教程
Check
Action
品管中心:涂良贤 2014年8月24日
Improved
课程目标
• 坐标测量基础知识 •矢量和余弦的理解 •了解为什么并且如何进行测头校正 •工件定位基本原理 • 完全理解如何建立零件坐标系 •几何要素的检测 •形位公差的计算 • 学会如何编制零件的測量程式 •三次元设备保养
矢量
矢量可以被看做一个单位长的直线,并指向矢量方向。 相对于三个轴的方向矢量。I方向在X轴,J方向在Y轴,K方 向在Z轴。矢量I、J、K值介于1和-1之间,分别表示与X、Y、 Z夹角的余弦。
+K
K Z Y +J
J I
X +I
矢量方向
矢量用一条末端带箭头的直线表示,箭头表示了它的 方向。X、Y、Z表示三坐标测量机的坐标位置,矢量I、J、 K表示了三坐标测量机三轴正确的测量方向。
2)工件的实际定位
定位元件的种类:
支承钉;支承板,长销,短销,长V形块, 短V形块,长定位套,短定位套,固定锥销,
浮动锥销等。
注意:定位元件所限制的自由度与其大小、 长度、数量及其组合有关
长短关系、大小关系、数量关系、组合关系
表 1-10 典型定位元件的定位分析
工件的 定位面
定位情况
夹具的定位元件
19320二维距离与三维距离举例说明
垂直度
0.15 A
0.15 MM宽的公差带
A
A
实际表面的可能方位。
平行度
0.15 A
0.15 MM宽的公差带
A
A
实际表面的可能方位。
倾斜度
35 °
A
0.5 A
35 °
0.5 MM宽的公差带
实际表面的可能方 位。
A
常见检测程序编制流程
打印
三次元的维护
1)六点定位原理
一个物体在空间可以有六个独立的运动,在直角座标
系中分别为3个平移运动和3个转动。习惯上,把上述6
个独立运动称作六个自由度。
ZZ
Y
X
Y
X
X
在实际应用中,常把接触面积很小 的支承钉看作是约束点
支承钉
六点定位原理:
一个物体在空间可以有六个独立的 运动,若采用6个按一定规则布置的约 束点,就可以限制工件的6个自由度, 实现完全定位,称为六点定位原理。
压缩空气压力:0.4MPa~0.7MPa
谢谢大家!
圆柱上铣平面需限制2个自由度。
㈠ 根据工件加工要求、分析理论 上应该限制哪几个自由度
1.钻 Φ 6H7孔
2.铣两台阶面
3.铣b槽
4.车端面保证L
理限:
理限:
5.钻d孔
6.铣台阶面
理限:
理限:
7.铣前、后两平面
8.a) 钻2个d孔 b) 钻d孔
理限:
a a) 理限:
b b) 理限:
3-2-1法建立坐标系
※本公司的机器是通过键输入测针径的。这时用键输入测针径后进行校正作业。
※注意点 为了正确校正测针要注意:例如校正φ2.0的测头时,测针尺寸要尽量接近φ2.0, 原则上0.0002mm以内。
2.工件在夹具中的定位
⑷定位基准:
确定工件在夹具中位置的基准,
即与夹具定位元件接触的工件上的点、 线、面。当接触的工件上的点、线、面 为回转面、对称面时,称回转面、对称 面为定位基面,其回转面、对称面的中 心线称定位基准。由工艺人员确定,是 工序图上标“ ”所示的基准。
25.4 ±0 .12
0.24
0.24 25.4 ± 0.12
50.8 ±0 .12
元素的尺寸及公差
位置度 下图是理论圆中心的示意图
25.52
测量圆的中心位置
表示 “好” 表示超差
25.18 50.68
50.92
元素的尺寸及公差
位置度
下图显示了为什么两个点距离相同但不是每个都在公差
之内。
超差表示
未知直径和 位置的测头
已知直径并且可以 溯源到国家基准的 标准器。
测头校正
在实物基准的每个测量点 的球心坐标同它的已知道 直径比较。有效的测头直 径是通过计算每个测量点 所组成的直径与已知直径 的差值
有效测头半 径
测针的校正
➢测针径的修正以及机械坐标系的原点设定。
三次元因为有自动修正使用测针的直径的机能,所以使用的测针必须 实施测针的校正,实施了校正作业的话就会自动设定机械坐标系的原点。
1 个支承钉
2 个支承钉
平 面
支 承 钉
图示
限制的自由度
X
Y、Z
定位情况
一块条形支承板 二块条形支承板
3 个支承钉
Z、X、Y
一块矩形支承板
平 面
支 承 钉
图示
限制的自由度
Y、Z
Z、X、Y
Z、X、Y
定位情况
图示
限制的自
圆 孔
圆 由度 柱 定位情况 销
图示
限制的自 由度
短圆柱销
根据工件加工面的位置度(包括位置尺寸)要 求,仅需要限制1个或几个(少于6个)自由度 的定位。称作不完全定位。
4) 举例
图2.1为轴上通铣键槽
X,Z方向移动 自由度,
X,Z方向转动 自由度
(轴上通铣键槽)
xz
x z
图2.2为长方体上通 铣平面
X,Y方向转动自由度, Z方向移动自由度
x y z
一致。
6)定位中存在问题
➢ ⑴欠定位:工件定位时,应该限制的自由度没 有被全部限制的定位。实际不允许发生。
图2.7加工槽,有尺 寸A和B的要求
⑵过定位(重复定位):工件定位时,几个定位 元件重复限制工件同一自由度的定位。
如下2.7图,位于同一平面内的四个定位 支承钉限制了三个自由度。
不允许:如果工件的定位面为没 有经过机械加工的毛坯面,或虽 经过了机械加工、但仍然很粗糙, 这时过定位是不允许的。
允许:如果工件的定位面经过了 机械加工,并且定位面和定位元 件的尺寸、形状和位置都做得比 较准确,比较光整,则过定位不 但对工件加工面的位置尺寸影响 不大,反而可以增强加工时的刚 性,这时过定位是允许的。
过定位例
7)限制自由度与加工尺寸要求的关系,从 上面几例分析知,一般情况下:
⑴保证一个方向上的加工尺寸需要限制1--3个自由度: ⑵保证二个方向上的加工尺寸需要限制4--5个自由度: ⑶保证三个方向上的加工尺寸需要限制6个自由度。 特殊性例外。如在圆球上铣平面需限制1个自由度,在
图2.3(a)在工件上铣通槽,保证槽宽和槽的 上下、左右位置要求,试确定定位方案
保证槽的上下位置要求:必须限制 保证槽的左右位置要求:必须限制
xx yyzz
槽宽由定尺寸刀具保证
综合结果: 必须限制五个自由度
x x y z z
பைடு நூலகம்
注意问题
1)定位元件限制自由度的作用表示它与工件 定位面接触,一旦脱开就失去限制自由度的作 用。
位置度公差带
合格
位置度产生一个圆形公差带,它能很好地判断特征元素的配 合关系。
元素的尺寸公差
二维距离
二维距离的计算是两元素相对于当前工作平面的距
离。典型例子就是点到线、圆到圆、圆到线的距离。
元素的尺寸公差
三维距离
三维距离计算的是两个元素之间的最小距离,与工 作平面无关.
典型用途: 点到平面的距离
Y、Z
菱形销
Z
长圆柱销 两段短圆柱销
Y、Z、Y、Z
长销小平面 组合
Y、Z、Y、Z
短销大平面组 合
X、Y、Z、Y、Z
X、Y、Z、Y、Z
3)完全定位和不完全定位
根据工件加工面的位置度(包括位置尺寸)要 求,需要6个根据工件加工面的位置度(包括 位置尺寸)要求自由度全部被限制的定位,称 作完全定位
3-2-1法建立坐标系是三坐标测量机最常用的建立坐标 系方法,如下图所示建立坐标系:
1、在零件上平面测量3个点拟合一平面找正。 2、在零件前端面上测量2个点拟合一直线旋转轴。 3、在零件左端面测量1个点设定原点。
经由段差点建立坐标
元素的尺寸及公差 位置度
元素的尺寸及公差
位置度
下面的实例是输出圆的常规公差:
在三坐标测量中矢量精确指明测头垂直触测被测特征
的方向,即测头触测后的Z回退方(+K向。) I = 0.707
Y
(+J )
J = 0.707
K=0 45度方向矢量
45
°
X
(+I )
测头校正
测头校正对所定义测头的 有效直径及位置参数进行 测量的过程。为了完成这 一任务,需要用被校正的 测头对一个校验标准进行 测量。