算法报告-旅行商问题模板讲解
关于旅行商问题的数学模型

关于旅行商问题的数学模型旅行商问题(TravelingSalesmanProblem,TSP)是著名的组合优化问题,它的目标是找到一条路径,使得一个旅行商可以经过所有给定的城市,路径总长度最短。
这个问题在实际生活中有着广泛的应用,例如物流配送、电路板布线、DNA序列比对等领域。
本文将介绍旅行商问题的数学模型和解法。
1. 问题描述假设有n个城市,它们的位置分别为(xi,yi),i=1,2,...,n。
旅行商要从一个城市出发,经过所有城市恰好一次,最后回到出发城市。
城市之间的距离可以用欧几里得距离表示:d(i,j) = sqrt((xi-xj)^2 + (yi-yj)^2)旅行商问题的目标是找到一条路径,使得路径总长度最短。
2. 数学模型2.1 定义变量我们定义变量xij表示从城市i到城市j的路径是否被选择,如果被选择则xij=1,否则xij=0。
例如,x12表示从城市1到城市2的路径是否被选择。
2.2 目标函数旅行商问题的目标是找到一条路径,使得路径总长度最短。
因此,我们可以定义目标函数为:minimize ∑i∑j d(i,j)xij其中,i,j表示城市的编号,d(i,j)表示城市i和城市j之间的距离,xij表示从城市i到城市j的路径是否被选择。
2.3 约束条件旅行商需要经过所有城市恰好一次,因此我们需要添加以下约束条件:1. 每个城市只能被经过一次:∑j xij = 1, i=1,2,...,n2. 每个城市离开后只能到达一个城市:∑i xij = 1, j=1,2,...,n3. 不能出现子回路:∑i∈S ∑j∈S xij ≤ |S|-1, S{1,2,...,n}, |S|≥2其中,第一个约束条件表示每个城市只能被经过一次,第二个约束条件表示每个城市离开后只能到达一个城市,第三个约束条件表示不能出现子回路。
3. 解法旅行商问题是一个NP难问题,没有多项式时间算法可以求解。
因此,我们需要使用一些启发式算法来求解这个问题。
A星算法求解旅行商问题(可打印修改)
int size = str_arr.length; int[] int_arr = new int[size];
for(int i = 0; i < size; i ++){ int_arr[i] = Integer.valueOf(str_arr[i]);
}
return int_arr; }
//获取所有路径中最短的路径 private int get_min_distance(){
FileInputStream fi = new FileInputStream(file);
InputStreamReader ir = new InputStreamReader(fi);
BufferedReader br = new BufferedReader(ir);
//------------------------------------
城市之间的距离:通过 n*n 矩阵 city_distance 表示,其中 n 表示城市的个数。编号为 k 的城市到各个城市之间的距离可以从第(k-1)行获取。
open 表:用队列表示,城市结点进入队列之前需要根据估计值 fvalue 按升序排列。
close 表:用向量表示。 搜索图:搜索图通过 open 表构建,将路径的编号保存在一个数组 id_list 中。 四、实验结果和分析 1、输入数据 第一行的数Байду номын сангаас 8 表示城市结点的个数,后面是一个 8*8 的数组,数组的值表示城市之 间的距离。任何一个结点到自身的距离是 0,数组中的第 0 行表示第 1 个城市到各个城市 之间的距离,其他的可类推。
Astar 算法求解旅行商问题
一、问题描述 一共有 n 个城市,某推销员从其中的一个城市 A 出发经过每个城市一次且仅一次后回
图算法--旅行商问题

图算法--旅⾏商问题旅⾏商问题的描述试想⼀下,⼀个业务员因⼯作需要必须访问多个城市。
他的⽬标是每个城市只访问⼀次,并且尽可能地缩短旅⾏的距离,最终返回到他开始旅⾏的地点,这就是旅⾏商问题的主要思想。
在⼀幅图中,访问每个顶点⼀次,并最终返回起始顶点,这个访问的轨迹称为哈密顿圈。
要解决旅⾏商问题,需要⽤图G=(V,E)作为模型,寻找图中最短的哈密顿圈。
G是⼀个完整的、⽆⽅向的带权图,其中V代表将要访问的顶点的集合,E为连接这些顶点的边的集合。
E中每条边的权值由顶点之间的距离决定。
由于G中⼀个完整的、⽆⽅向的图,因此E包含V(V-1)/2条边。
事实上,旅⾏商问题是⼀种特殊的⾮多项式时间问题,称为NP完全问题。
NP完全问题是指那些多项式时间算法未知,倘没有证据证明没有解决的可能性的问题。
考虑到这种思想,通常⽤⼀种近似算法来解决旅⾏商问题。
最近邻点法的应⽤⼀种近似的计算旅⾏商路线的⽅法就是使⽤最近邻点法。
其运算过程如下:从⼀条仅包含起始顶点的路线开始,将此顶点涂⿊。
其他顶点为⽩⾊,在将其他顶点加⼊此路线中后,再将相应顶点涂⿊。
接着,对于每个不在路线中的顶点v,要为最后加⼊路线的顶点u与v之间的边计算权值。
在旅⾏商问题中,u与v之间边的权值就是u到v 之间的距离。
这个距离可以⽤每个顶点的坐标计算得到。
两个点(x1,y1)与(x2,y2)之间距离的计算公式如下:r = √(x2 - x1)2 + (y2 - y1)2 (注意是求和的平⽅根)利⽤这个公式,选择最接近u的顶点,将其涂⿊,同时将其加⼊路线中。
接着重复这个过程,直到所有的顶点都涂成⿊⾊。
此时再将起始顶点加⼊路线中,从⽽形成⼀个完整的回路。
下图展⽰了使⽤最近邻点法来解决旅⾏商问题的⽅法。
通常,在为旅⾏商问题构造⼀个图时,每个顶点之间相连的边不会显⽰表⽰出来,因为这种表⽰会让图不清晰了,也没有必要。
在图中,每个顶点旁边都显⽰其坐标值,虚线表⽰在此阶段需要⽐较距离的边。
实验报告-旅行商问题
91、实验题目人工智能实验报告——旅行商问题旅行商问题:从某个城市出发,每个城市只允许访问一次,最后又回到原来的城市, 寻找一条最短距离的路径。
请定义两个h 函数(非零),讨论这两个函数是否都在h*的下界范围,是否满足单调限制?你认为哪个会产生比较有效的搜索?2、实验目的及要求旅行商问题是图论中的一个重要的经典问题,本次实验要求学生要求自行定义两个h 函数(非零),独立编写程序解决旅行者问题,语言不限,工具不限,独立完成实验报告。
通过本次实验,使学生加深对图搜索策略的理解和认识,对启发式搜索、估价函数有更深入的理解认识,并学会灵活掌握及解决实际问题。
3、实验设备装有Office 软件的微机一台,本次实验使用Visual studio 6.0开发环境4、实验内容本实验首先对旅行商问题进行了学习了解,之后结合人工智能课堂内容,设计了两个h 函数,使用C 语言编写实现。
具体说明及步骤如下。
4.1、旅行商问题旅行商问题是图论中的一个重要的经典问题: 任给一个城市与城市间的道路图, 求一个旅行商访问每个城市并回到出发点的最短路程。
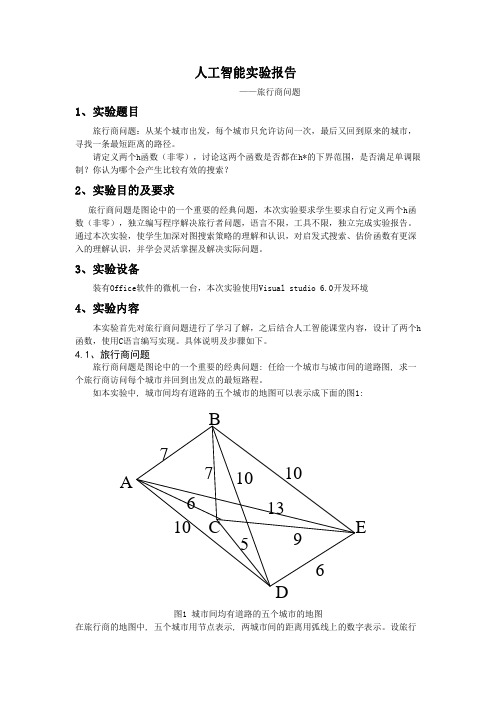
如本实验中, 城市间均有道路的五个城市的地图可以表示成下面的图1:B7 A7 10 10 6 13 10 CE56D图1 城市间均有道路的五个城市的地图在旅行商的地图中, 五个城市用节点表示, 两城市间的距离用弧线上的数字表示。
设旅行商从A 城市出发, 到B、C、D、E 等城市去推销商品, 要寻找一条从A 出发, 包括B、C、D、E, 且仅包含一次, 最后回到A 的一条最短路径。
4.2、A*算法A* 算法是N.Nillson于1971年提出的一种有序搜索算法, 该算法被认为是求解人工智能问题的最成功的技术理论之一。
Nillson指出对于某一已到达的现行状态, 如已到达图中的n节点, 它是否可能成为最佳路径上的一点的估价, 应由估价函数f(n)值来决定。
假设g*(n)函数值表示从起始节点s 到任意一个节点n 的一条最佳路径上的实际耗散值。
建模经典问题——旅行商问题图文 文档全文预览

目录第7章 旅行商问题1.问题概述2.求解算法2.1.下界和上界算法2.2.分支定界法2.3.动态规划法2.5.近似算法2.5.竞赛题
2
§7-1 问题概述一 、数学模型1.标准TSP旅行商问题(简称TSP ), 也称货郎担问题或 旅行推销员问题,是运筹学中一个著名的问题,其 一般提法为:有一个旅行商从城市1出发,需要到 城市2、3、 …、n 去推销货物,最后返回城市1,若 任意两个城市间的距离已知,则该旅行商应如何选 择其最佳行走路线?
18
TS 多面体研究中的一个重要问题就是寻找能导出Q” 最大面的不等式, Grotschel 等人发现了一类很重要的能导 出最大面的梳子不等式,并予以了证明。此外,还有其它 能导出最大面的不等式,如团树不等式等。可见, Q" 的最 大面极多,曾经计算过由梳子不等式所导出的最大面个数 如表7-1所示:表 7 - 1
27
对结点i的e(i)1, 边e(i)1 的一个结点为i, 另 一 个结点为j=dmi n_j(i,1), 若e(i)1 也是结点j 关联边 中最小的两条边之一,即i =dmin_j(j,1) 或 i=dmin_j(j,2 ), 则对边e(i)1 来说就不需要调整,否则 按以下方式调整:
8
从严格的数学意义而言,瓶颈TSP (简称BTSP )并没有降低问题的难度,也未能提供任何特殊的解决 办法。瓶颈TSP的数学模型与标准TSP类似,仅目标函 数不同:min Z=max{d,·xi|i,jeV}
由于目标函数为瓶颈值,故求得的最佳巡回路 线与标准TSP的往往截然不同。
16
称X为路线T的关联向量,其m=n(n-2)/2 个分量中,恰好 有个为1,其余的都为0。图有许多H amilt on回路,设为T₁.T₂.…T,, 对应的关联向 量记为X₁,X₂…X 。, 在m维空间Rm中,考虑这些向量生成的 凸包( convex hull) Q":
基于优化算法的求解旅行商问题

基于优化算法的求解旅行商问题大一时我第一次学习了旅行商问题,当时我感到很惊讶:这个看起来非常简单的问题,却有着很难解决的复杂性。
只有问题规模足够小的时候,我们才能用穷举法来解决。
对于问题规模稍大一些的情况,我们便需要采用一种优化算法。
近年来,一些优秀的优化算法的出现,使得旅行商问题高效求解成为了可能。
标准的旅行商问题描述如下:给定一系列城市和每对城市间的距离,求解访问每一座城市一次并回到起始城市所需要的最短路线,即访问n个城市的所有路径的最小值。
这个问题的解法其实很直观:我们可以按照某种固定的顺序,计算每一种可能路径的长度,最后选取其中最短的。
然而,这种方法的难点在于计算出所有可能的路线很复杂,仅当问题规模很小的时候我们才可以用它来解决。
旅行商问题是一个非常重要的优化问题,它被广泛应用于物流、旅游等领域。
随着数据量的急剧增长,传统的优化算法效率越来越低。
这个时候,人们开始使用一些基于机器学习的优化算法。
其中,遗传算法和模拟退火算法备受瞩目。
遗传算法是一种基于生物学的演化理论的优化方法。
在遗传算法中,一个问题解的集合称为“种群”。
种群中的每个解称为“个体”,而且每个个体通过某种与适应度相关联的函数来评估质量。
适应度高的个体有更大的机会参与下一代种群的遗传操作。
在种群中,通过交叉、变异和选择等步骤实现演化。
选出种群中最好的个体,然后在该个体附近进行微小变化,这些变化可以是交换两个城市,也可以是插入某个城市。
这个过程类似于热力学中的模拟退火。
在这个过程中,我们允许一些不是最优的解被接受,以避免陷入局部最小值。
这个过程会逐渐降低温度,直到问题的解趋近于最优解。
在接下来的时间里,我将会解释这些算法的具体实现,并给出一些实验结果。
TSP问题遗传算法求解实验报告
一、旅行商问题所谓旅行商问题(Travelling Salesman Problem , TSP),即最短路径问题,就是在给定的起始点S到终止点T的通路集合中,寻求距离最小的通路,这样的通路成为S点到T点的最短路径。
在寻找最短路径问题上,有时不仅要知道两个指定顶点间的最短路径,还需要知道某个顶点到其他任意顶点间的最短路径。
遗传算法方法的本质是处理复杂问题的一种鲁棒性强的启发性随机搜索算法,用遗传算法解决这类问题,没有太多的约束条件和有关解的限制,因而可以很快地求出任意两点间的最短路径以及一批次短路径。
假设平面上有n个点代表n个城市的位置, 寻找一条最短的闭合路径, 使得可以遍历每一个城市恰好一次。
这就是旅行商问题。
旅行商的路线可以看作是对n 个城市所设计的一个环形, 或者是对一列n个城市的排列。
由于对n个城市所有可能的遍历数目可达(n- 1)!个, 因此解决这个问题需要0(n!)的计算时间。
假设每个城市和其他任一城市之间都以欧氏距离直接相连。
也就是说, 城市间距可以满足三角不等式, 也就意味着任何两座城市之间的直接距离都小于两城市之间的间接距离。
二、遗传算法1 遗传算法介绍遗传算法是由美国J.Holland教授于1975年在他的专著《自然界和人工系统的适应性》中首先提出的,它是一类借鉴生物界自然选择和自然遗传机制的随机化搜索算法。
通过模拟自然选择和自然遗传过程中发生的繁殖、交叉和基因突变现象,在每次迭代中都保留一组候选解,并按某种指标从解群中选取较优的个体,利用遗传算子(选择、交叉和变异)对这些个体进行组合,产生新一代的候选解群,重复此过程,直到满足某种收敛指标为止。
遗传算法在本质上是一种不依赖具体问题的直接搜索方法,是一种求解问题的高效并行全局搜索方法。
其假设常描述为二进制位串,位串的含义依赖于具体应用。
搜索合适的假设从若干初始假设的群体集合开始。
当前种群成员通过模仿生物进化的方式来产生下一代群体,如随机变异和交叉。
旅行商问题——模拟退火算法实现

旅⾏商问题——模拟退⽕算法实现1.问题描述旅⾏商问题(Travelling Salesman Problem, 简记TSP,亦称货郎担问题):设有n个城市和距离矩阵D=[d ij],其中d ij表⽰城市i到城市j的距离(i,j=1,2 … n),则问题是要找出遍访每个城市恰好⼀次的⼀条回路并使其路径长度为最短。
2.算法设计对原问题进⾏分析,TSP的⼀个解可表述为⼀个循环排列:Π= (Π1,Π2,Π3… Πn),即Π1→Π2→ … →Πn→Π1有(n-1)!/2 种不同⽅案,若使⽤穷举法,当n很⼤时计算量是不可接受的。
旅⾏商问题综合了⼀⼤类组合优化问题的典型特征,属于NP 难题,不能在多项式时间内进⾏检验。
若使⽤动态规划的⽅法时间复杂性和空间复杂性都保持为n的指数函数。
本次实验利⽤模拟退⽕算法(Simulated Annealing)求解TSP问题。
模拟退⽕算法最早由N.Metropolis等⼈于1953年提出,基于物理中固体物质的退⽕过程与⼀般组合优化问题之间的相似性。
该算法从某⼀较⾼初温出发,伴随温度参数的不断下降,结合概率突跳特性在解空间随机寻找全局最优解。
退⽕是将固体加热到⾜够⾼的温度,使分⼦呈随机排列态,然后逐步降温冷却,最后分⼦以低能状态排列,得到稳定状态的固体。
退⽕的过程有:(1)加温过程:增强粒⼦运动,消除系统原本可能存在的⾮均匀态;(2)等温过程:对于与环境换热⽽温度不变的封闭系统,系统状态的⾃发变化总是朝向⾃由能减少的⽅向进⾏,当⾃由能达到最⼩时,系统平衡;(3)冷却过程:使粒⼦热运动减弱并逐渐趋于有序,系统能量逐渐下降,从⽽得到低能的晶体结构。
其中,固体在恒温下达到热平衡的过程采⽤Metropolis⽅法进⾏模拟:温度恒定为T时,当前状态i转为新状态j,如果j状态的能量⼩于i,则接受状态j为当前状态;否则,如果概率p=exp{-(E j-E i)/(k*T)}⼤于[0,1)区间的随机数,则仍接受状态j为当前状态;若不成⽴则保留状态i为当前状态。
C++旅行商问题

旅行商问题实验报告学院:计算机科学与技术专业:计算机科学与技术学号:班级:姓名:(本程序在MicrosoftVisualC++6.0的环境下实现)一、问题描述:某售货员要到若干城市去推销商品,已知各城市之间的路程(或旅费)。
他要选定一条从驻地出发,经过每个城市一遍,最后回到驻地的路线,使总的路程(或旅费)最小。
例如:给定4个城市{a,b,c,d}及其各城市之间的路程,找出其最短路径二、算法思想:首先是在图为完全图的前提下,构造各城市间的图的结构,采用邻接数组的形式,将各个城市间的距离存储于图的数组中,用一个函数递归寻找从同一个顶点出发的各个城市的所有路径,再求出各个路径的路程,并与相应的路径输出,对路程数组进行冒泡排序后,经比较找出最短路径并输出。
三.具体实现及分析:图结构的定义:struct MGraph{char vexs[MAX_VEX_NUM];//顶点向量int arcs[MAX_VEX_NUM][MAX_VEX_NUM];//邻接矩阵int vexnum,arcnum;//顶点数,边数};// AdjMatrix函数int CreateUDG(MGraph &G) 用数组邻接矩阵表示法构造无向图函数void Perm(Type list[], int k, int m)用于递归生成路径排列,并寻找最佳路径采用递归实现路径排列是一种比较简便的方法,但其需做(n-1)!/2次循环,时间复杂度为O((n-1)!/2),有待改进。
辅助数组Help[ ]对Count[ ]数组进行排序,找出最小值,当旅行商的地点大于等于5时,只比较Count[ ]数组的前半部分会有遗漏。
函数void Swap ( Type &a ,Type & b)用于递归时的字符交换函数函数void Inicialize(MGraph &G)//用于初始化各个数组,并调用递归函数Perm();主函数:void main()//主函数{int choice;//选择操作变量while(true){cout<<"请选择操作:1: 执行程序!0: 退出程序!"<<endl;cin>>choice;if (choice==1){CreateUDG(G);//函数调用Inicialize(G);cout<<endl;cout<<endl;}if (choice==0)break;}}三.源程序:#include<iostream>using namespace std;#define MAX_VEX_NUM 20//最大顶点数int **Mat;//定义动态二维数组,存储生成的排列int *list;//定义动态辅助数组int *Count;//定义动态计数数组int *Help;//定义动态辅助数组int e=0;//定义全局变量struct MGraph{char vexs[MAX_VEX_NUM];//顶点向量int arcs[MAX_VEX_NUM][MAX_VEX_NUM];//邻接矩阵int vexnum,arcnum;//顶点数,边数};// AdjMatrixMGraph G; //声明一个无向图的邻接矩阵类型int visited[MAX_VEX_NUM];//设置标志数组int Locatevex(MGraph G,char v)//图的基本操作,寻找顶点V的位置{int i=0;while(i<G.vexnum && v!=G.vexs[i])i++;if(i<G.vexnum)return i;//查找成功则返回顶点的下标elsereturn -1;}int CreateUDG(MGraph &G) //数组邻接矩阵表示法构造无向图{char v1,v2;int weight;//权值cout<<"请输入图的顶点数和弧数"<<endl;cin>>G.vexnum>>G.arcnum;cout<<"请输入顶点值"<<endl;for(int i=0;i<G.vexnum;i++)//构造顶点向量cin>>G.vexs[i];for(int q=0;q<G.vexnum;q++){for(int p=0;p<G.vexnum;p++){G.arcs[q][p]=0;//初始化邻接矩阵}}for(int k=0;k<G.arcnum;k++)//构造邻接矩阵{cout<<"输入该弧依附的顶点和权值:"<<endl;cin>>v1>>v2>>weight;int a=Locatevex(G,v1);int b=Locatevex(G,v2);G.arcs[a][b]=weight;G.arcs[b][a]=G.arcs[a][b];}cout<<"图的顶点:";for(int n=0;n<G.vexnum;n++)//输出顶点cout<<G.vexs[n]<<" ";cout<<endl;cout<<endl;cout<<"该图的邻接矩阵表示为:\n";for(int x=0;x<G.vexnum;x++){for(int y=0;y<G.vexnum;y++){cout<<G.arcs[x][y]<<" ";//输出邻接矩阵}cout<<endl;}cout<<endl;cout<<endl;return 1;}//CreateUDGtemplate <class Type>void Perm(Type list[], int k, int m)//递归函数,生成排列,寻找最佳路径{int c=1;int a=m;while(a>1)//定义Mat数组的行数{c=c*a*(a-1);a-=2;}int d=m+1;//定义Mat数组的列数if ( k == m && list[0]==0){for(int i = 0; i <= m; i++){Mat[e][i]=list[i];//符合条件时生成排列,存储在数组Mat中}e++;}if(Mat[c-1][m]!=-1 && e==c )//当找出所有可能路径时,计算所有路径长度,并找到最短路径{for(int g=0;g<c;g++){for(int h=0;h<d;h++){int x=Mat[g][h];//获取路径坐标int y=Mat[g][h+1];Count[g]=Count[g]+G.arcs[x][y];//计算路径长度}}cout<<"所有路径及其路径长度:"<<endl;for(g=0 ;g<c;g++)//输出所有路径及其路径长度{for(int h=0;h<=d;h++){int k=Mat[g][h];cout<<G.vexs[k]<<"->";}cout<<" "<<Count[g]<<endl;}for(g=0;g<c;g++)Help[g]=Count[g];//赋值for(int i=0;i<c;i++)//对辅助数组冒泡排序,找最小值{for(int j=1;j<c;j++){if (Help[i]>Help[j]){int temp=Help[i];Help[i]=Help[j];Help[j]=temp;}}}int Min_way=Help[0];//Min_way为最短路径for (i=0;i<c;i++){if (Count[i]==Min_way){cout<<"旅行商最佳路径为:";for(int j=0;j<=d;j++){int k=Mat[i][j];cout<<G.vexs[k]<<"->";//输出最短路径}cout<<" 路径长度为:"<<Min_way;cout<<endl;}}}else{for ( int i = k; i <= m; i ++)//递归生成排列组合{Swap( list[k],list[i] );Perm(list,k + 1, m ) ;Swap( list[k], list[i] );}}}template < class Type >inline void Swap ( Type &a ,Type & b)//字符交换函数{Type temp = a; a = b; b = temp;}void Inicialize(MGraph &G)//初始化各个数组函数{int a=G.vexnum ;//图的顶点数,列数int b=a-1;//辅助变量int c=a-1;int n=1;//辅助变量,行数while(b>1){n=n*b*(b-1);b-=2;}Mat=new int*[n];for(int i=0;i<n;i++){Mat[i]=new int[a];for(int j=0;j<=a;j++){if (j<a){Mat[i][j]=-1;//数组初始化}else{Mat[i][j]=0;}}}list=new int[a];for(i=0;i<a;i++)//数组初始化list[i]=i;Count=new int[n];for(i=0;i<n;i++)Count[i]=0;//数组初始化Help=new int[n];for(i=0;i<n;i++)Help[i]=0;//数组初始化Perm(list,1,c);//函数调用}void main()//主函数{CreateUDG(G);//函数调用Inicialize(G);}四.运行结果:<1> 当顶点为4时:<2> 测试当顶点为5时:。
A星算法求解旅行商问题
Astar算法求解旅行商问题一、问题描述一共有n个城市,某推销员从其中的一个城市A出发经过每个城市一次且仅一次后回到A,求代价最小的路径。
二、知识表示1、状态表示初始状态,目标状态。
初始状态:A(出发城市)目标状态:A,···((n-1)个城市),A2、算法描述(1)设城市结点的个数为n,获取开始结点,计算所有成员变量的值,将开始结点放入open表(open表用队列实现);(2)如果open表不为空,转(3),否则转(7);(3)将open表中的首元素放入close表,并将该首元素从open表中删除。
(4)获取已访问结点的个数num,如果num ≥n+1,则找到最佳路径,转(7);(5)如果num==n,还访问一个结点到达目标结点,设置初始结点的访问状态isVisited[0]的值为false,表示初始结点没有被访问,即可以回到出发点;(6)如果num<n,将从当前结点出发可访问的结点和open表中剩余的结点放入一个向量vector中,根据每个结点的fvalue值按升序排列,排列的结果按升序放入open表,转(2);(7)获取close表中的最后一个元素,打印最佳路径,相邻城市之间的距离,最短的距离值。
3、估价函数f(n)=g(n)+h(n) ,h(n)≤h*(n)。
g(n):从开始结点到当前结点n的实际距离,等于路径的权值的和。
h(n):假设城市结点n的深度为depth,城市的个数为city_num,(city_num-depth)表示从n到目标城市还需要的路径个数,min表示所有路径长度的最小值,则h(n)=min*(city_num-deep)表示从当前城市结点n到目标结点的路径长度的最小估计值,h(n)≤h*(n)显然对于任意的一个城市结点都成立。
三、算法实现主要的数据结构城市结点:depth表是从开始城市到当前城市,访问的城市个数,也可以称为深度;num 表示已访问的城市结点的个数;id_list是一个数组,表示从开始城市到当前城市的所有城市的编号的集合,编号的值从1开始;isVisited是一个布尔数组,记录当前城市结点到目标城市结点的访问状态,布尔值为false,表示可访问;fvalue表示从开始城市出发回到原点的估计值。
旅行商问题实验报告

算法设计与分析实验报告姓名:xx班级:xxxx学号:xxxxxx实验名称:旅行商问题实验目的:1.分支限界法按广度优先策略搜索问题的解空间树,在搜索过程中,对待处理的结点根据限界函数估算目标函数的可能取值,从中选取使目标函数取得极值(极大或极小)的结点优先进行广度优先搜索,从而不断调整搜索方向,尽快找到问题的解。
2.分支限界法适用于求解最优化问题。
实验程序:输入:图G=(V, E)输出:最短哈密顿回路1.根据限界函数计算目标函数的下界down;采用贪心法得到上界up;2.计算根节点的目标函数并加入待处理的结点表PT;3.循环直到某个叶子结点的目标函数值在表PT中取得极小值3.1i=表PT中具有最小值的结点;3.2对结点i的每个孩子结点x执行下列操作;3.2.1估算结点x的目标函数值lb;3.2.2若(lb<=up),则将结点x加入表PT中,否则丢弃该结点;4.将叶子结点对应的最优值输出,回溯求得最优解的各个分量。
实验分析:问题描述:TSP 问题是指旅行家要旅行n 个城市,要求各个城市经历且仅经历一次然后回到出发城市,并要求所走的路程最短。
采用贪心法求得近似解为:1→3→5→4→2→1,其路径长度为1+2+3+7+3=16,这可以作为TSP 问题的上界,把矩阵中每一行最小的两个元素相加再除以2,得到TSP 问题的下界:[(1+3)+(3+6)+(1+2)+(3+4)+(2+3)]/2=14,于是得到目标函数的界[14,16]。
一般情况下,假设当前已确定的路径为U=(r1, r2, …, rk),即路径上已确定了k 个顶点,此时,该部分解的目标函数值 的计算方法(限界函数)如下:27 156 3 1 3 4 2 5 39 8 4C = ∞ 3 1 5 8 3 ∞ 6 7 9 1 6 ∞ 4 2 5 7 4 ∞ 3 8 9 2 3∑∑∑=∉-=+++=k i Ur j i k i i i j r r r r c lb ,11112/)]][[2(行最小的两个元素素行不在路径上的最小元分支限界法求解图上机心得与体会:时间复杂性分析:分支限界法实际上属于蛮力穷举法,当然不能指望它有很好的最坏时间复杂性,遍历具有指数阶个结点的解空间树,在最坏情况下,时间复杂性肯定为指数阶。
算法分析题目 旅行商问题

算法分析题目旅行商问题算法分析题目旅行商问题算法分析题目:旅行商问题#include#include#definenoedge1000//图g的无边标记structminheapnode//最小堆,用于表示活结点优先队列;};intlcost,cc,rcost;//x[s:n-1]中顶点最轻出来边权的和ints;//根节点至当前节点的路径为x[0:s]int*x;//须要进一步搜寻的顶点就是//x[s+1:n-1]structminheapnode*next;intn;//图g的顶点数int**a;//图g的邻接矩阵intcc;//当前费用intbestc;//当前最轻费用minheapnode*head=0;/*堆头*/minheapnode*fq=0;/*堆上第一个元素*/minheapnode*lq=0;/*堆最后一个元素*/intdeletemin(minheapnode*&e)minheapnode*tmp=null;tmp=fq;}e=fq;if(e==null)return0;head->next=fq->next;/*一定不能丢了链表头*/fq=fq->next;return0;intinsert(minheapnode*hn)if(head->next==null){}else{minheapnode*tmp=null;tmp=fq;if(tmp->cc>hn->cc)head->next=hn;//将元素放入链表中fq=lq=head->next;//一定要使元素放到链中}else{for(;tmp!=null;){if(tmp->next!=null&&tmp->cc>hn->cc){hn->next=tmp->next;tmp->next=hn;break;hn->next=tmp;head->next=hn;fq=head->next;/*链表只有一个元素的情况*/}tmp=tmp->next;}}if(tmp==null){lq->next=hn;lq=lq->next;}}return0;intbbtsp(intv[]){//求解旅行商问题的优先队列式分支限界法/*初始化最优队列的头结点*/head=(minheapnode*)malloc(sizeof(minheapnode));head->cc=0;head->x=0;head->lcost=0;head->next=null;head->rcost=0;head->s=0;int*minout=newint[n+1];/*定义定点i的最小出边费用*///计算minout[i]=顶点i 的最小出边费用intminsum=0;//最小出边费用总合for(inti=1;i}min=a[i][j];/*更新当前最小值*/if(min==noedge)returnnoedge;//并无电路minout[i]=min;/*顶点i的最轻出来边费用*/minsum+=min;/*最轻出来边费用的总和*/minheapnode*e=0;e=(minheapnode*)malloc(sizeof(minheapnode));e->x=newint[n];for(i=0;ix[i]=i+1;e->s=0;e->cc=0;e->rcost=minsum;e->next=0;//初始化当前拓展节点intbestc=noedge;/*记录当前最小值*///搜寻排序空间树while(e->ss==n-2){//当前扩展结点是叶结点的父结点首先考量s=n-2的情形,此时当前拓展结点就是排序树中某个叶结点的父结点。
算法报告-旅行商问题模板讲解
2.1.2 TSP 问题的动态规划函数 假设从顶点 i 出发,令 d(i,V ') 表示从顶点 i 出发经过 V ' 中各个顶点一次且仅
一次,最后回到出发点 i 的最短路径长度,开始时, V ' V i ,于是, TSP 问
题的动态规划函数为: d (i ,V ') min cik d (k,V
k ) (k V ')
贪心法求解 TSP 问题的贪心策略是显然的,至少有两种贪心策略是合理的: 最近邻点策略和最短链接策略。本文仅重点讨论最近邻点策略及其求解过程。 最近邻点策略: 从任意城市出发, 每次在没有到过的城市中选择距离已选择的城 市中最近的一个,直到经过了所有的城市,最后回到出发城市。 2.2.3 算法分析 1.P={ }; 2.V=V-{u0}; u=u0; //从顶点 u0 出发 3.循环直到集合 P 中包含 n-1 条边
3.3 两者比较
动态规划法相对贪心法来说虽然要精确些,但代码相对繁杂很多,对时间和 空间要求很多, 仅适用于城市数量较小的情况。 贪心法虽然比较简单, 实现起来 比较容易, 但不是很精确, 当图中顶点个数较多并且各边的代价值分布比较均匀 时,贪心法可以给出较好的近似解, 不过,这个近似解以何种程度近似于最优解, 却难以保证。
swap(&pArr[i],&pArr[j]);
//更新当前累加值 ,是 i-1 与 i 的
g_iCurResult += g_iArr[ pArr[i-1] ][ pArr[i] ];
//递归
backTrace(i+1,pArr);
//回溯,清空累加值;能够走到这里,说明上述结果不是最
优解,需要向求解树上一层回退
数学建模经典问题——旅行商问题

早在1954年,Dantzig等人就曾提出过 一种方法(非多项式算法),并且求出了一个42城 市的TSP最优解。到了1960年代,不少人用分支定 界法解决了许多有几十个城市的TSP。还有人提出 了一些近似方法,也解决了许多有几十个城市甚至 上百个城市的TSP(有时找到的仅是近似解)。更 值得注意的是,从1970年代中期开始,Grotschel 与Padberg等人深入研究了TS多面体的最大面 (facet),并从所得结果出发获得了一种解TSP的 新算法,可以解决一些有100多个城市的TSP,且都 在不长的时间内找到了最优解。
iS jS
xij 0, 1
i V j V S V , 2 S n 1
(7 1) (7 2) (7 3)
模型中,为集合中所含图的顶点数。约束
(7-1)和(7-2)意味着对每个点而言,仅有一条边
进和一条边出;约束(7-3)则保证了没有任何子回路
解的产生。于是,满足约束(7-1)、(7-2)和(7
边集,各顶点间的距离dij已知。设
xij
1 , 0,
若i, j 在回路路径上
其他
则经典的TSP可写为如下的数学规划模型:
nn
min Z
dij xij
i 1 j 1
n
xij 1,
j 1
n
s.t
i1
xij
1,
xij S 1,
TSP有着明显的实际意义,如,邮局里负责到各 信箱开箱取信的邮递员,以及去各分局送邮件的汽车等,都 会遇到类似的问题。有趣的是,还有一些问题表面上看似乎 与TSP无关,而实质上却可以归结为TSP来求解。已经证明, TSP是个NP难题,除非P = NP,否则不存在有效算法。
基于动态规划算法的旅行商问题求解
基于动态规划算法的旅行商问题求解旅行商问题(Traveling Salesman Problem,TSP)是一个经典的组合优化问题。
它的任务是在给定一系列城市和每对城市之间的距离(或者称为成本),找到一条经过每个城市一次且回到起始城市的最短路径。
动态规划算法是求解旅行商问题的一种常用方法。
它基于以下思想:将大问题分解为若干个小问题,通过解决小问题的最优解来逐步得到大问题的最优解。
首先,我们需要定义旅行商问题的状态。
在本问题中,我们可以将状态定义为一个二元组 (i, S),它表示旅行商当前所在的城市为 i,已经遍历过的城市集合为 S。
这里的状态空间是城市集合 C 的幂集除去空集:状态空间:C = {1, 2, ..., n},其中 n 是城市的数量。
接下来,我们需要定义状态转移方程。
假设当前状态为 (i, S),我们需要求解的是到达状态 (i, C) 的最短路径。
状态转移方程可以表示为:dp[i][S] = min{dist[i][j] + dp[j][S\{j}]},其中 j∈S,j≠i其中,dp[i][S] 是从城市 i 出发,经过集合 S 中的城市,最后回到起始城市的最短路径长度。
dist[i][j] 表示城市 i 到城市 j 的距离。
S\{j} 表示从集合 S 中去掉元素 j 后的集合。
最后,我们需要定义问题的边界条件。
当集合 S 中只有一个城市 i 时,经过城市 i 后回到起始城市的路径长度就是从起始城市到达城市 i 的距离。
所以边界条件可以表示为:当 |S| = 1 时,dp[i][S] = dist[i][1]接下来,我们使用动态规划算法来解决旅行商问题。
1. 创建一个二维数组 dp[n][2^n],其中 n 是城市的数量。
初始化数组 dp 的所有元素为无穷大。
2. 对于每个城市 i,将 dp[i][∅](空集)的值设为 dist[i][1]。
3. 对于集合 S 的大小从 2 到 n-1 的每个值,依次遍历每个城市 i。
旅行商问题”的A算法实现

改原则是"抄f(x)值小的路走"; (2) 对其余子节点配上指向N的返回指针后放入OPEN表中,并对OPEN表按f(x)值升序排 序,转步2。 下面为A*算法的伪代码: AStar () {
Open = [起始节点]; Closed = []; while (Open表非空) { 从Open中取得一个节点X,并从OPEN表中删除; if (X是目标节点) { 求得路径PATH;返回路径PATH; } for (每一个X的子节点Y) { if (Y不在OPEN表和CLOSE表中) { 求Y的估价值; 并将Y插入OPEN表中; } //还没有排序 else if (Y在OPEN表中) { if (Y的估价值小于OPEN表的估价值) { 更新OPEN表中的估价值;
} else {
将Y插入OPEN表中; } } else //Y在CLOSE表中 { if (Y的估价值小于CLOSE表的估价值) { 更新CLOSE表中的估价值; 从CLOSE表中移出节点,并放入OPEN表中; } else { 将Y插入OPEN表中; } } }//end for
பைடு நூலகம்
将X节点插入CLOSE表中; 按照估价值将OPEN表中的节点排序; }//end while }//end func 三、测试用例 1、用两个城市测试,如下图:
经过运行后找到最佳路径如下图所示:
2、用四个城市测试,如下图:
经过运行后找到最佳路径如下图所示:
3、用五个城市测试,如下图:
经过运行后找到最佳路径如下图所示:
从以上三个例子我们可以看出,本程序正确无误。 四、 心得体会 1. 通过本实验,我深该地掌握了A*算法,弄清A算法与A*算法的区别与联系,弄清了启 发式算法较之盲目搜索算的优点。 2. 懂得算法不等于就能够写出算法对应的程序。算法是思想,要想把思想转化为程序, 不仅要求对算法能够深刻地理解,还要能够把算法抽象成程序能如表示的方法(如设计相 应的数据结构)。因此,实现算法,既是对算法理解加深的过程,又是提高程序设计能力 的过程。 五、源程序 本程序使用MFC7.0编写,项目名为TravelerField。所有源代码位于同文件夹的 TravelerField项目中。 ??
遗传算法解决旅行商问题(TSP)

遗传算法解决旅⾏商问题(TSP)这次的⽂章是以⼀份报告的形式贴上来,代码只是简单实现,难免有漏洞,⽐如循环输⼊的控制条件,说是要求输⼊1,只要输⼊⾮0就⾏。
希望会帮到以后的同学(*^-^*)⼀、问题描述旅⾏商问题(Traveling-Salesman Problem,TSP)。
设有n个互相可直达的城市,某推销商准备从其中的A城出发,周游各城市⼀遍,最后⼜回到A城。
要求为该旅⾏商规划⼀条最短的旅⾏路线。
⼆、⽬的为了解决旅⾏商问题,⽤了遗传算法,模拟染⾊体的遗传过程,进⾏求解。
为了直观的更有⽐较性的观察到程序的运⾏效果,我这⾥程序⾥给定了10个城市的坐标,并计算出其任意两个的欧⽒距离,10个点的位置排布见图1。
程序的理想最优距离为20.485281,即绕三⾓形⼀圈,⽽且路程起点不固定,因为只要满⾜点围着三⾓形⼀圈即为最短距离,最优解。
所以问题转换为,求图中10 个点的不重复点的闭环序列的距离最⼩值。
图 1三、原理1、内部变量介绍程序总体围绕了遗传算法的三个主要步骤:选择--复制,交叉,变异。
给定了10个种群,即10条染⾊体,每条染⾊体都是除⾸位外不重复的点组成,⾸尾相同保证路线是闭合的,所以⼀条染⾊体包含11个点。
种群由⼀个结构体group表⽰,内含城市的序列int city[11]、种群的适应度double fit、该种群适应度占总群体适应度的⽐例double p,和为了应⽤赌轮选择机制的积累概率 double jlleigailv。
程序还包括⼀个始终记录所有种群中的最优解的城市序列数组groupbest[11],记录最优解的适应度,即最⼤适应度的变量 double groupbestfit。
种群的最⼤繁衍代数设置为1000,⽤户能够输⼊繁衍代数,但必须在1000以内。
10个点的不同排列序列有10!种,即3628800中排列可能,其中各代之间可能产⽣重复,不同种群间也会出现重复,学⽣觉得1000左右应该能验证程序的性能了,就定为1000。
实验报告-旅行商问题
91、实验题目人工智能实验报告——旅行商问题旅行商问题:从某个城市出发,每个城市只允许访问一次,最后又回到原来的城市, 寻找一条最短距离的路径。
请定义两个h 函数(非零),讨论这两个函数是否都在h*的下界范围,是否满足单调限制?你认为哪个会产生比较有效的搜索?2、实验目的及要求旅行商问题是图论中的一个重要的经典问题,本次实验要求学生要求自行定义两个h 函数(非零),独立编写程序解决旅行者问题,语言不限,工具不限,独立完成实验报告。
通过本次实验,使学生加深对图搜索策略的理解和认识,对启发式搜索、估价函数有更深入的理解认识,并学会灵活掌握及解决实际问题。
3、实验设备装有Office 软件的微机一台,本次实验使用Visual studio 6.0开发环境4、实验内容本实验首先对旅行商问题进行了学习了解,之后结合人工智能课堂内容,设计了两个h 函数,使用C 语言编写实现。
具体说明及步骤如下。
4.1、旅行商问题旅行商问题是图论中的一个重要的经典问题: 任给一个城市与城市间的道路图, 求一个旅行商访问每个城市并回到出发点的最短路程。
如本实验中, 城市间均有道路的五个城市的地图可以表示成下面的图1:B7 A7 10 10 6 13 10 CE56D图1 城市间均有道路的五个城市的地图在旅行商的地图中, 五个城市用节点表示, 两城市间的距离用弧线上的数字表示。
设旅行商从A 城市出发, 到B、C、D、E 等城市去推销商品, 要寻找一条从A 出发, 包括B、C、D、E, 且仅包含一次, 最后回到A 的一条最短路径。
4.2、A*算法A* 算法是N.Nillson于1971年提出的一种有序搜索算法, 该算法被认为是求解人工智能问题的最成功的技术理论之一。
Nillson指出对于某一已到达的现行状态, 如已到达图中的n节点, 它是否可能成为最佳路径上的一点的估价, 应由估价函数f(n)值来决定。
假设g*(n)函数值表示从起始节点s 到任意一个节点n 的一条最佳路径上的实际耗散值。
贪心算法求解TSP(旅行商问题)

•特殊说明: •程序在访问最后一个节点钱 ,所访问的行中至少有1个允许访问的节 点 ,依次访问这些节点找到最小即可: 在访问最后一个节点后 ,再 次访问 ,会返回k=0, 即实现了访问源节点。所以,各个节点都被访 问 ,且访问路径为一简单回路。
•实例演示:
•例题:
•以4个节点为例 ,演示算法运行过程(以100表示无大): •输入连接矩阵:
•主函数代码:
•程序实现:
•程序实现:
•求最短距离函数代码:
Thank you !
•核心算法说明:
•1) 输入节点数n和连接矩阵a •2) 定义行 、列允许矩阵row[n]= {1, …, 1} 、row[n]= {1, …, 1} •3) 赋初值: s=0, i=0 •4)While row[i]= 1
•5) j=0,m=a[i][0],k=0 •6) 找到第一个允许访问的节点a[i][j] •7) 寻找a[i][j~n- 1]中的最小元素
贪心算法求解(TSP) 旅行商问题
-
•问题描述
1 •旅行商问题(Traveling Salesman Problem, TSP) :
有一个推销员 ,要到n个城市推销商品 ,他要找出一个 包含所有n个城市的具有最短路程的环路。
•例如给定一个城市和城市间的距离集合 ,求经过所有 城市恰好一次的最短回路, •即;给定图G= (V,E,W),其中V为顶点集合, |V|=n, E为边集合 ,W为边权函数 ,求集合{1,2 , …n}的一个排 列使得下式最小。
•最优子结构性质(n>=2):
•设sn是此问题的最优解 ,那么可以把它分解为
sn=s2+sn- 1 ;
•假设存在s ’n-1为n- 1规模是的最优解 ,则
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《算法设计与课程设计》题目: TSP问题多种算法策略班级:计算机技术14学号:姓名:指导老师:完成日期:成绩:旅行商问题的求解方法摘要旅行商问题(TSP 问题)时是指旅行家要旅行n 个城市然后回到出发城市,要求各个城市经历且仅经历一次,并要求所走的路程最短。
该问题又称为货郎担问题、邮递员问题、售货员问题,是图问题中最广为人知的问题。
本文主要介绍用动态规划法、贪心法、回溯法和深度优先搜索策略求解TSP 问题,其中重点讨论动态规划法和贪心法,并给出相应求解程序。
关键字:旅行商问题;动态规划法;贪心法;回溯法;深度优先搜索策略 1引言旅行商问题(TSP)是组合优化问题中典型的NP-完全问题,是许多领域内复杂工程优化问题的抽象形式。
研究TSP 的求解方法对解决复杂工程优化问题具有重要的参考价值。
关于TSP 的完全有效的算法目前尚未找到,这促使人们长期以来不断地探索并积累了大量的算法。
归纳起来,目前主要算法可分成传统优化算法和现代优化算法。
在传统优化算法中又可分为:最优解算法和近似方法。
最优解算法虽然可以得到精确解,但计算时间无法忍受,因此就产生了各种近似方法,这些近似算法虽然可以较快地求得接近最优解的可行解,但其接近最优解的程度不能令人满意。
但限于所学知识和时间限制,本文重点只讨论传统优化算法中的动态规划法、贪心法、回溯法和深度优先搜索策略。
2正文2.1动态规划法2.1.1动态规划法的设计思想动态规划法将待求解问题分解成若干个相互重叠的子问题,每个子问题对应决策过程的一个阶段,一般来说,子问题的重叠关系表现在对给定问题求解的递推关系(也就是动态规划函数)中,将子问题的解求解一次并填入表中,当需要再次求解此子问题时,可以通过查表获得该子问题的解而不用再次求解,从而避免了大量重复计算。
2.1.2 TSP 问题的动态规划函数假设从顶点i 出发,令'(,)d i V 表示从顶点i 出发经过'V 中各个顶点一次且仅一次,最后回到出发点i 的最短路径长度,开始时,{}'V V i =-,于是,TSP 问题的动态规划函数为:{}{}{}''(,)min (,)()(,)()ik ki d i V c d k V k k V d k c k i =+-∈=≠2.1.3算法分析(1)for (i=1; i<N; i++) //初始化第0列d[i][0]=c[i][0];(2)for (j=1; j< n-12 -1; j++)for (i=1; i<n; i++) //依次进行第i 次迭代if (子集V[j]中不包含i)对V[j]中的每个元素k ,计算V[m] == V[j]-k;d[i][j]=min(c[i][k]+d[k][m]);(3)对V[n-12 -1]中的每一个元素k ,计算V[m] == V[n-12-1]-k; d[0][ n-12 -1]=min(c[0][k]+d[k][m]);(4)输出最短路径长度d[0][ n-12 -1];2.1.4时间复杂性T()(2)n n O n =⨯动态规划法求解TSP 问题,把原来的时间复杂性是O(n!)的排列问题,转化为组合问题,从而降低了算法的时间复杂性,但它仍需要指数时间。
2.2贪心法2.2.1贪心法的设计思想贪心法在解决问题的策略上目光短浅,只根据当前已有的信息就做出选择,而且一旦做出了选择,不管将来有什么结果,这个选择都不会改变。
换言之,贪心法并不是从整体最优考虑,它所做出的选择只是在某种意义上的局部最优。
这种局部最优选择并不总能获得整体最优解,但通常能获得近似最优解。
2.2.2最近邻点策略求解TSP 问题贪心法求解TSP 问题的贪心策略是显然的,至少有两种贪心策略是合理的:最近邻点策略和最短链接策略。
本文仅重点讨论最近邻点策略及其求解过程。
最近邻点策略:从任意城市出发,每次在没有到过的城市中选择距离已选择的城市中最近的一个,直到经过了所有的城市,最后回到出发城市。
2.2.3算法分析1.P={ };2.V=V-{u0}; u=u0; //从顶点u0出发3.循环直到集合P 中包含n-1条边3.1查找与顶点u 邻接的最小代价边(u, v)并且v 属于集合V ;3.2 P=P+{(u, v)};3.3 V=V-{v};3.4 u=v; //从顶点v 出发继续求解2.2.4时间复杂性2()T O n但需注意,用最近邻点贪心策略求解TSP问题所得的结果不一定是最优解。
当图中顶点个数较多并且各边的代价值分布比较均匀时,最近邻点策略可以给出较好的近似解,不过,这个近似解以何种程度近似于最优解,却难以保证。
2.3回溯法2.3.1回溯法的设计思想回溯法(探索与回溯法)是一种选优搜索法,按选优条件向前搜索,以达到目标。
但当探索到某一步时,发现原先选择并不优或达不到目标,就退回一步重新选择,这种走不通就退回再走的技术为回溯法,而满足回溯条件的某个状态的点称为“回溯点”。
若已有满足约束条件的部分解,不妨设为(x1,x2,x3,……xi),I<n,则添加x(i+1)属于s(i+2),检查(x1,x2,……,xi,x(i+1))是否满足条件,满足了就继续添加x(i+2)、s(i+2),若所有的x(i+1)属于s(i+1)都不能得到部分解,就去掉xi,回溯到(xi,x2,……x(i- 1)),添加那些未考察过的x1属于s1,看其是否满足约束条件,为此反复进行,直至得到解或证明无解。
2.3.2 算法分析(回溯法+深度优先搜索策略)因为是采用回溯法来做,肯定是递归,然后还需要现场清理。
要设置一个二维数组来标识矩阵内容,然后回溯还需要设计一个二维标记数组来剪枝,设定一个目标变量,初始为无穷大,后续如果有比目标变量值小的就更新。
剪枝的条件就是如果走到当前节点的耗费值>=目标变量,就直接不再往下面走,向上走。
深度优先= 递归递归基:如果到达叶子节点的上一个节点,那么就进行是否更新的判断递归步:如果没有到达叶子节点,就进行剪枝操作,判断能否进入下一个节点,如果能,更新最优值2.3.3 关键实现(回溯法+深度优先搜索策略)1 //递归基:如果已经遍历到叶子节点的上一层节点,i标识递归深度if(i == g_n){//判断累加和是否超过最大值,如果有0,应该排除;满足这个条件,才打印if((g_iArr[pArr[i-1]][pArr[i]] != 0) && (g_iArr[pArr[g_n]][1] != 0) && (g_iCurResult + g_iArr[pArr[i-1]][pArr[i]] + g_iArr[pArr[g_n]][1] < g_iResult )){g_iResult = g_iCurResult + g_iArr[pArr[i-1]][pArr[i]] + g_iArr[pArr[g_n]][1];//用当前最优路径去更新最优路径,防止下一次没有for(int k = 1 ; k <= g_n ; k++){g_iBestPath[k] = pArr[k];2 //递归步:判断能否进入子树,需要尝试每一个节点else{//尝试不同的组合for(int j = i ; j <= g_n ; j++){//判断能否进入子树:如果当前值+下一个连线值的和< 最优值,就进入,0要passif( (g_iArr[pArr[i-1]][pArr[j]] != 0) && (g_iCurResult + g_iArr[ pArr[i-1] ][ pArr[j] ] < g_iResult) )3 //交换i与j,则i为当前可以尝试的范围//为完成后面k个元素的排列,逐一对数组第n-k~n个元素互换。
数组第一个元素为1,生成后面n-1个元素的排列//数组第一个元素与第二个元素互换,第一个元素为2,第2个元素为1,生成后面的n-1个元素的排列...swap(&pArr[i],&pArr[j]);//更新当前累加值,是i-1与i的g_iCurResult += g_iArr[ pArr[i-1] ][ pArr[i] ];//递归backTrace(i+1,pArr);//回溯,清空累加值;能够走到这里,说明上述结果不是最优解,需要向求解树上一层回退g_iCurResult -= g_iArr[pArr[i-1]][ pArr[i] ];swap(&pArr[i],&pArr[j]);*/2.3.4时间复杂性T = O(n!), 该方法并没有有效的提高时间效率。
3结论本文主要重点讨论了动态规划法、贪心法、回溯法和深度优先搜索策略求解TSP问题算法,并附录给出了相应程序,并通过对比得到动态规划法和贪心法相对更有优势,下面对这两种方法进行详述和进一步对比。
3.1动态规划法思想动态规划法中对于顶点元素生成的子集本文中用字符串形式存储,然后再用递归方法按照子集中元素个数从小到大开始赋值。
因为后面元素个数较多的子集与前面比其元素个数少1的子集间有一定对应关系,所以用递归方式,可以简便很多。
个人觉得这算本文的一大特色。
另,在计算d[i][j] =min(c[i][k]+d[k][j-1])时,获得d[k][j-1]的过程比较困难,运用字符串后,我们就可以首先找到指定字符,然后去掉该字符,返回剩余字符串,在与V[]逐个比较,找到与其相等的V[]中元素对应下标,此下标即为j-1;具体求解过程可参考附录源程序,有详细说明。
在求解最佳路径所经过城市顺序时,本文是通过边查找d[i][j]边记录路径的,这样可以省掉很多麻烦,另,路径也是采用字符串形式的数组,数组规模与存储城市间距离的c[][]数组相同,由于很多元素均不需赋值,这样做可能会浪费内存空间,但是目前还没找到更好地求解方法。
3.2贪心法思想贪心法中,由于贪心法相对动态规划法要简单很多,每次在查找最近城市时所得的顶点均为最后该法最佳路径所经过的城市编号,规模相对较小,容易确定,操作相对简单,所以本文用数组V[]存放最佳路径所经过的城市编号顺序相对来说方便很多。
另外,本文用path[]整型数组存放所经路径的长度,最后相加即可得最短路径。
3.3两者比较动态规划法相对贪心法来说虽然要精确些,但代码相对繁杂很多,对时间和空间要求很多,仅适用于城市数量较小的情况。
贪心法虽然比较简单,实现起来比较容易,但不是很精确,当图中顶点个数较多并且各边的代价值分布比较均匀时,贪心法可以给出较好的近似解,不过,这个近似解以何种程度近似于最优解,却难以保证。