常见动作建模及FFD-浙江大学
浙江大学控制系课件先进控制导论(考研必备)

2
1-2 常用过程控制理论及应用
一、过程控制理论
过程控制理论,原自于经验的PID。
过程控制系统的分析和设计,主要应用频率响应特性,这种理论对于过程控制工程技术人员都比较熟悉
这种理论对于过程控制工程技术人员都比较熟悉。
到了1960年代,空间技术的发展,控制系统用状态方程来描述,这种方法是用来开发各种优化控制理论的基础。
这来描述这种方法是用来开发各种优化控制理论的基础。
这样,使得原有的频率响应分析方法要作改进,使之适合于多变量的复杂的控制系统设计问题。
因此,现代控制系统设计不再分频域和时域,发展成为统一的理论。
为了介绍方便,现仍将其分成频域与时域来介绍,如表1所示此表列举了典型的控制技术应用于不同系统的表示所示。
此表列举了典型的控制技术应用于不同系统的表示:控制系统设计、控制系统构成和辨识的方法。
先控技应课程学任务
先进控制技术及应用课程教学任务
目次内容时间(次)上课人1导论、预测控制技术1苏宏业2软测量技术1苏宏业3变结构控制技术1苏宏业4容错控制技术1苏宏业5综合自动化技术4荣冈6直流调速技术毛维杰
2
7交流调速技术4毛维杰8位置随动系统与传感
2毛维杰
技术
参考书
•《先进控制技术及应用》,王树青等,化学工业出版社,2001年7月
《电力拖动自动控制系统运动控制•——
系统》(第3版),陈伯时,机械工业出版社,2003年7月
社。
常见动作建模及FFD-浙江大学

2019/5/6
浙江大学
28
边缘提取与隐线消除
• 边缘提取:计算各个剖面在X-Y平面上投影沿X轴方向
的大小极值,它们分别对应于头的右边和左边,然后 以一定顺序连接这些极值点画出头部边缘。
• 隐线消除:由于头像各部分是用曲线绘制的,做quaternion插值 • 计算插值中某一时刻马各个关节的顶点数据 • 根据马的位置和运动方向对顶点数据做坐标变
换
• 根据视点位置再做坐标变换,投影,显示结果
2019/5/6
浙江大学
22
3D扩展
2019/5/6
浙江大学
23
一个转头模型
2019/5/6
浙江大学
• 旋转轴下端经过坐标系原点,上端沿一玫瑰线运动,
方程如下
r=a*sin(t*) 这里t为时间,t=0时对应位置1,t=1时对应位置9。 参数a和眼睛高度h控制低头的程度。根据实验,
a/h=0.4~0.5之间较合适。
2019/5/6
浙江大学
27
旋转矩阵
• 利用旋转矩阵把三维头像进行旋转,
n1,n2,n3为旋转轴的方向余弦,
浙江大学
42
失败的场合
• 虽然(a)和(c)两个关键视角上的卡通形象是合理的,但 生成的(b)却有不合理的地方(注意头发).
• 造成不合理的原因是头发形状的变化不能通过2D线性插 值来很好地模拟
• 此外,脑后的头发部份被前面的头部遮挡,现有模型不 能处理这种遮挡。
• 革命尚未成功,同志们仍需努力!
浙江大学
50
FFD 算法
• 计算区域内每个要变的点(s,t)坐标, 如点P的直角坐标
FFD建模

a
20
20、在“前视图”中调节切角长 方体左侧一列的控制点,修改如 图所示;
a
21
21、在“前视图”中按住 SHIFT键沿X轴复制 一个 切角长方体——在“控制 点”子层级中修改控制点 回到矩形状态;
a
22
22、在“左视图”中 创建一个切角圆柱 体——“参数”如右 上图所示——摆放位 置如左下图所示;
改器列表”——
“FFD4*4*4”——“控制点子层
级”——先在左视图中调节
再到前视图中调节;(效果
如左下角图所示)
a
13
13、把两个模型全 选——“组”——“成组: 支架”——确定—— 按住“SHIFT”键复制7 组——摆放到沙发底 部,做为支架;(摆 放位置如左下图所示, 要注意调整方向)
a
14
a
28
a
29
a
17
17、在“前视图”中创建一个 “切角圆柱体”——“半径25, 高度240,圆角5”——再按住 SHIFT健沿Y轴向上复制2个;
a
18
18、“前视图”中——创 建——“扩展基本体”—— “切角长方体”——“参数” 如右图所示;
a
19
19、“修改器列表”—— “FFD4*4*4”——“控制点”子层级— —“左视图”中把靠垫修改成上下小 中间大的形状;
a
10
10、“修改器列表”——单击 “FFD2*2*2”——单击“控制点”子层 级——在“前视图”中选择底部控制点, 向左侧水平方向移动至如左上图所示的位 置;
a
11
11、“透视图”中——创 建一个“切角圆柱体”— —“参数”如右图所示— —位置调整如左上图所示;
a
12
12、选中“圆柱体”——“修
D建模在舞台表演特效设计中的应用
D建模在舞台表演特效设计中的应用随着科技的不断进步,舞台表演特效设计变得越来越重要。
其中,D建模技术的应用为舞台表演带来了全新的可能性。
D建模是指通过三维计算机图形技术,将实物物体建模成虚拟的三维模型,并在舞台上进行投影展示。
本文将探讨D建模在舞台表演特效设计中的应用,以及其对舞台表演的影响。
一、D建模在舞台场景设计中的应用1.1 舞台场景的建模D建模技术可以将舞台场景进行精确的建模,包括舞台布景、道具、虚拟背景等。
通过D建模,设计师可以将复杂的场景设计在计算机上进行模拟和调整,以达到更好的效果。
同时,D建模还可以为舞台场景增加虚拟元素,如动态虚拟人物、特殊效果等,进一步提升舞台表演的视觉冲击力。
1.2 舞台灯光的设计D建模技术还可以在舞台灯光设计中发挥重要作用。
通过将灯光与D建模相结合,设计师可以在虚拟舞台上进行灯光投影的实验和调整,以达到最佳的效果。
同时,D建模还可以模拟不同灯光效果下的舞台效果,以帮助设计师更好地进行创作和决策。
二、D建模在舞台特效设计中的应用2.1 特殊效果的实现在舞台表演中,特殊效果的运用可以提升观众的视觉冲击力和参与感。
D建模技术可以帮助设计师实现各种特殊效果,如火焰喷射、爆炸、变形等。
通过在虚拟模型上进行模拟和调整,设计师可以精确控制特效的展示效果,并根据舞台表演的需求进行创作和修改。
2.2 视觉冲击力的提升借助D建模技术,舞台表演可以呈现更加逼真和惊艳的视觉效果。
通过D建模,设计师可以将现实世界中不易实现的场景和元素带入虚拟舞台,创造出奇特的视觉冲击力。
例如,在舞台上利用D建模技术创造出巨大的怪兽,或者让演员在虚拟世界中与虚拟角色进行互动,都能为观众带来全新的观赏体验。
三、D建模对舞台表演的影响3.1 提升舞台表演的创意性D建模技术的应用为舞台表演提供了更多的创作可能性。
设计师可以通过D建模技术在计算机上进行创作和调整,大胆尝试各种创意,并在实际表演中呈现出理想效果。
浙江大学第八届大学生数学建模竞赛题目

浙江大学第八届大学生数学建模竞赛试题(A 题、B 题)1. 各参赛队可在公布的A 、B 两题中任选一题作答,在规定时间内完成论文。
论文应包括模型的假设、建立和求解、计算方法的设计和计算机实现、结果的分析和检验、模型的改进等方面,并附主要程序代码。
2. 答卷用白色A4纸打印,上下左右各留出2.5厘米的页边距。
论文第一页为封面,各参赛队需从浙江大学本科生创新网( )上下载答卷封面,如实填写后作为封面与论文全文装订成册. 论文题目和摘要写在论文第二页上,从第三页开始是论文正文。
论文从第二页开始编写页码,页码必须位于每页页脚中部,用阿拉伯数字从“1”开始连续编号。
3. 论文不能有页眉,论文中不能有任何可能显示答题人身份的标志。
4. 论文题目用3号黑体字、一级标题用4号黑体字,并居中。
论文中其他汉字一律采用小4号黑色宋体字,行距用单倍行距。
5. 提请各参赛队注意:摘要在整篇论文评阅中占有重要权重,请认真书写摘要(注意篇幅不能超过一页)。
评阅时将首先根据摘要和论文整体结构及概貌对论文优劣进行初步筛选。
6. 论文请于5月14日上午9:00-11:00期间交到以下地点之一: (1)玉泉校区欧阳纯美数学楼104室(2)紫金港校区西1教学楼三楼教师休息室。
7. 今年将要求部分队伍提交论文电子版、主要源程序等有关参赛资料,请各参赛队妥善保管,并确保联系电话、电子邮箱的有效性。
8. 各参赛队应严格遵守竞赛规则,比赛开始后不得更换队员,不得与队外任何人(包括在网上)讨论。
9. 引用别人的成果或其他公开的资料(包括网上查到的资料) 必须按照规定的参考文献的表述方式, 在正文引用处和参考文献中均明确列出。
正文引用处用方括号标示参考文献的编号,如[1][3]等;引用书籍还必须指出页码。
参考文献按正文中的引用次序列出,其中书籍的表述方式为:[编号] 作者,书名,出版地:出版社,出版年。
参考文献中期刊杂志论文的表述方式为:[编号] 作者,论文名,杂志名,卷期号:起止页码,出版年。
ffd 变形 原理

ffd 变形原理
FFD(Free Form Deformation)变形器,即自由形式变形器,是一种在计算机图形学中广泛应用的建模工具。
其原理是通过控制点对物体进行变形,从而实现对物体形状的调整。
这种变形方式具有较高的灵活性,可以实现多种复杂的造型效果。
FFD变形器的原理可以概括为以下几点:
1. 创建FFD控制器:首先在场景中创建一个FFD控制器,这个控制器通常是一个立方体或球体。
2. 设定控制点:在FFD控制器的属性面板中,设置控制点的数量和分布。
控制点的数量和分布会影响到变形后的物体形状。
3. 链接对象:将FFD控制器与需要变形的物体(如立方体、圆柱体等)相连接,使控制器能够对物体产生影响。
4. 调整控制点:在Modify(修改)命令面板中,对控制点进行调整。
调整控制点的位置、旋转和缩放,从而改变物体的形状。
5. 转换为可编辑对象:在对控制点进行调整后,需要将物体转换为
可编辑对象,以便继续进行细节调整。
6. 细化或优化:根据需要,可以对FFD控制器进行细化或优化,以获得更精细的物体形状。
总之,FFD变形器的原理是通过调整控制点来改变物体的形状。
这种变形方式具有较高的灵活性,可以实现多种复杂的造型效果。
在实际应用中,FFD变形器被广泛用于游戏、影视、工业设计等领域。
2018届浙江省信息技术选考复习之Flash场景动作专题(含习题答案)

2018届信息技术选考之Flash动作专题命题:杜宗飞一、考试内容及要求考试内容考试要求考试属性1.多媒体创作工具 a 必考2.多媒体作品的合成①媒体素材的应用c 必考②场景的编辑③常用影片控制函数的应用3.多媒体作品的调试和发布 c 必考二、知识整理热点考向1:多媒体创作工具根据多媒体创作工具的创作方法和特点的不同,可将多媒体创作工具划分为四类:①以页为基础的创作工具(ToolBook、PowerPoint);②以图标和流程图为基础的创作工具(Authorware、IconAuthor);③以时间为基础的创作工具(Director、Action、Flash);④以程序语言为基础的创作工具(Visual Basic、Visual C+ + )。
热点考向2:媒体素材的应用媒体素材有文本、图形、声音、视频、动画等,文本可以用键盘输入或复制粘贴到舞台中,图形、声音、视频、动画可以导入到舞台或库中。
热点考向3:场景的编辑一个动画可以由多个场景构成,不同的场景介绍相互独立的内容。
动画播放时默认将按照它们的先后顺序来播放,也可以利用指令交互实现不同场景之间的跳转播放。
在场景面板中可以添加、删除、重命名、顺序调整等操作。
热点考向4:常用影片控制函数的应用Flash影片控制函数主要有帧动作命令和按钮动作命令。
(1)帧动作命令:关键帧或空白关键帧上才能设置,当播放到这帧时会自动执行命令。
(2)按钮动作命令:设置在按钮实例上,当用户触发事件情况下才会执行命令。
常用Flash交互控制命令的含义动作命令功能gotoAndPlay(“场景名”,帧); 将播放头转到场景中指定的帧并从该帧开始播放。
gotoAndstop(“场景名”,帧); 将转到场景中指定的帧并停止播放stop(); 停止当前正在播放的动画文件(画面暂停)。
play(); 在时间轴中继续播放。
nextFrame()播放下一帧,播放上一帧为prevFrame()。
浙江大学第二十届大学生结构设计竞赛细则

浙江大学第二十届大学生结构设讣竞赛细则一、竞赛题目与内容竞赛题目:《输电塔结构设计与模型制作》竞赛内容:理论方案设计、模型制作、陈述与答辩、加载测试。
二、参赛对象参赛对象为浙江大学在校本科学生,以自由组队形式参赛,每队参赛学生2~3人。
三、竞赛要求1. 参赛要求(1) 每个参赛队只能提交一份模型作品,并全部用汉字命名(作品名称不得多于6个汉字)。
(2) 每位学生只允许参加一个参赛队,各队应独立完成方案设计与模型制作。
(3) 参赛队必须在规宦时间内报名,逾期按自动放弃处理。
(4) 各参赛队必须在规左时间和地点参加竞赛活动,缺席者作自动放弃处理。
竞赛期间不得任意换人,若有参赛队员因特殊原因退岀•则缺人竞赛。
(5) 各参赛队必须参加竞赛全过程各个环不参加加载将无法获得第二课堂学分。
2. 理论方案要求(1) 内容和格式请按附件1:《浙江大学第二十届大学生结构设计竞赛理论方案》模版要求提交。
(2) 理论方案用A4纸双而打印、装订的理论方案文本一式2份:3. 模型制作及加载系统(1)模型要求400W250输电塔(b)俯视图G】V/ 300300(c )正立而图图1输电塔模型示意图(单位:mm ) 竞赛模型为输电塔模型,图1为模型示意图,结构形式不限,具体要求如下:① 模型总高度不限,但必须提供A 、B 两点作为输电线与输电塔的连接点(即加载点),要求A 、B 两点处构件顶而距底板上表而髙度为1000mm (误差±5mm ), A 、B 两点水平距离为600mm (误差 ±10mm ), A 、B 两点连线在底板上的水平投影与模型底板中线(在板上已标注)重合(误差±50mm )。
② 模型在A 、B 加载点连线下方塔身部分,自选部位将模型制作为可完全分离的两个或两个以上部 分,每部分的髙度不超过800mm,在比赛现场进行限时装配,装配现场提供模型制作工具一套(详 见附件工具列表,胶水除外)。
CAD中的人体建模和动画设计方法
CAD中的人体建模和动画设计方法CAD(计算机辅助设计)是一种在工程和设计领域广泛应用的软件工具。
在现代设计中,人体建模和动画设计是一个重要的方面,被广泛应用于电影、游戏、虚拟现实等领域。
本文将介绍在CAD中实现人体建模和动画设计的方法和技巧。
1. 人体建模人体建模是指创建一个虚拟的、符合人体解剖学结构的三维模型。
在CAD软件中,有多种方法可以实现人体建模,以下是其中两种常用的方法:- NURBS曲线:NURBS(Non-Uniform Rational B-Spline)曲线是一种用于建模的数学曲线。
通过将多个NURBS曲线组合在一起,可以创建复杂的人体形状。
这种方法的优点是可以精确地控制曲线的形状和光滑度,但需要一定的建模经验。
- 多边形建模:多边形建模是一种较为简单和常用的建模方法。
通过将许多面片(多边形)组合在一起,可以逐步构建出完整的人体形状。
这种方法的好处是易于使用和学习,但在处理复杂形状时可能不够精确。
2. 人体骨骼和运动捕捉在动画设计中,人物角色的运动是非常重要的。
为了实现逼真和自然的动画效果,需要将人体骨骼结构添加到人体模型中,并进行运动捕捉。
- 骨骼建模:通过为人体模型添加骨骼系统,可以模拟人体的关节和运动。
骨骼可以用一系列连接起来的骨骼节点来表示。
例如,可以使用笛卡尔坐标系来定义每个关节的旋转和平移。
- 运动捕捉:运动捕捉是一种技术,用于捕捉现实中人类运动,并将其应用于虚拟人体模型。
通过使用传感器、摄像机或激光扫描仪等设备,可以记录人体的运动数据,并将其转换为虚拟人物的动画。
3. 动画设计一旦创建了人体模型并添加了骨骼结构,就可以开始设计和制作动画。
- 关键帧动画:关键帧动画是一种最基本的动画技术。
通过在时间轴上选择关键帧,可以定义人体模型在不同时间点上的姿势和动作。
软件将自动在关键帧之间生成中间帧,以平滑过渡。
- 路径动画:路径动画是一种通过沿着预定路径移动人体模型来实现的动画技术。
浙江大学_机械设计基础_期末试题1
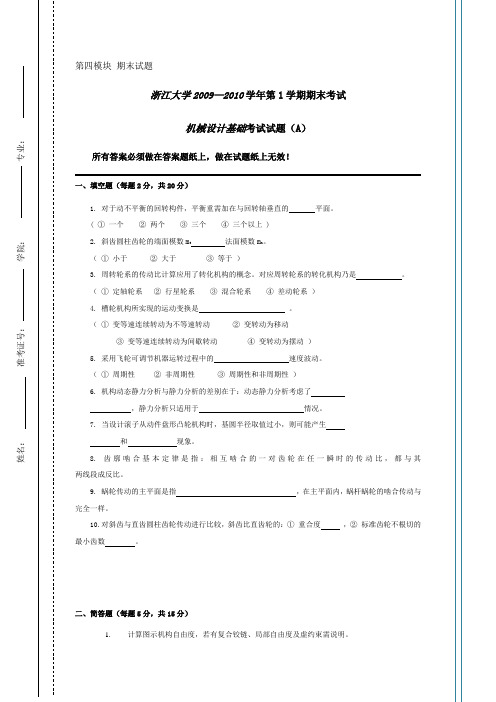
第四模块期末试题浙江大学2009—2010学年第1学期期末考试机械设计基础考试试题(A)所有答案必须做在答案题纸上,做在试题纸上无效!一、填空题(每题2分,共20分)1. 对于动不平衡的回转构件,平衡重需加在与回转轴垂直的平面。
( ①一个②两个③三个④三个以上 )2. 斜齿圆柱齿轮的端面模数m t 法面模数m n。
(①小于②大于③等于)3. 周转轮系的传动比计算应用了转化机构的概念。
对应周转轮系的转化机构乃是。
(①定轴轮系②行星轮系③混合轮系④差动轮系)4. 槽轮机构所实现的运动变换是。
(①变等速连续转动为不等速转动②变转动为移动③变等速连续转动为间歇转动④变转动为摆动)5. 采用飞轮可调节机器运转过程中的速度波动。
(①周期性②非周期性③周期性和非周期性)6. 机构动态静力分析与静力分析的差别在于:动态静力分析考虑了,静力分析只适用于情况。
7. 当设计滚子从动件盘形凸轮机构时,基圆半径取值过小,则可能产生和现象。
8. 齿廓啮合基本定律是指:相互啮合的一对齿轮在任一瞬时的传动比,都与其两线段成反比。
9. 蜗轮传动的主平面是指,在主平面内,蜗杆蜗轮的啮合传动与完全一样。
10.对斜齿与直齿圆柱齿轮传动进行比较,斜齿比直齿轮的:①重合度,②标准齿轮不根切的最小齿数。
二、简答题(每题5分,共15分)1.计算图示机构自由度,若有复合铰链、局部自由度及虚约束需说明。
2.图示为某机组在一个稳定运转循环内等效驱动力矩M d 和等效阻力矩M r 的变化曲线,并已在图中写出它们之间包围面积所表示的功值(N ·m ),试确定最大盈亏功△W max 。
3.试分析下图轮系的组成,并说明该轮系的类型。
由 组成 轮系, 由 组成 轮系, 称整个轮系为 轮系。
三、一对正常齿标准直齿圆柱齿轮传动,小齿轮因遗失需配制。
已测得大齿轮的齿顶圆直径d a2= 408mm ,齿数Z 2=100,压力角=20°,两轴的中心矩a =310mm ,试确定小齿轮的: (12分)1. 模数m 、齿数Z 1;2. 计算分度圆直径d 1;3. 齿顶圆直径d a1;4. 基节P b 。
浙大工业过程控制3过程动态特性分析-PPT精品文档

调节阀的结构特性
调节阀结构特性:阀芯与 阀座间的节流面积和阀门 开度之间的函数关系。
f 为相对节流面积;l 为 相对开度:
60
40
20 3.3 0 20 40 60 l ×100
2
df 线性阀(线1): Kf dl
课件
10
阀门的“气开”与“气 关”
1. 气开阀与气关阀
* 气开阀: pc↑→ f↑ (“有气则开”) * 气关阀: pc↑→ f↓ (“有气则关”) 无气源( pc = 0 )时,气开阀全关,气关阀全开。
2. 气开阀与气关阀的选择原则
* 若无气源时,希望阀全关,则应选择气开阀,如加热 炉瓦斯气调节阀;若无气源时,希望阀全开,则应选择气 关阀,如加热炉进风蝶阀。
F, cp, T2
凝液
F, T1
pc 执 行 机 构
u(t)
电气 转换器
pc
执行 l 机构
阀体
f
管路 系统
q
2019/2/16
....... .......
u(t):控制器输出 ( 4~20 mA 或 0~10 mA DC); pc :调节阀气动控制信号;
阀 体
l:阀杆相对位置; f :相对流通面积; q :受调节阀影响的管路相对流量。
机理建模
原理:根据过程的工艺机理,写出各种有关的平衡方程,如物料平衡、 能量平衡等,以及反映流体流动、传热、传质等基本规律的运动方程, 由此获得被控对象的动态数学模型。 特点:概念明确、适用范围宽,要求对该过程机理明确。
测试建模
原理:对过程的输入(包括控制变量与扰动变量)施加一定形式的激 励信号,如阶跃、脉冲信号等,同时记录相关的输入输出数据,再对 这些数据进行处理,由此获得对象的动态模型。 特点:无需深入了解过程机理,但适用范围小,模型准确性有限。
D建模与动制作技术
D建模与动制作技术D建模与动制作技术是一种广泛应用于电影、动画、游戏等领域的数字艺术技术。
它结合了计算机图形学、动画学、视觉特效等多个学科,通过利用计算机软件和硬件来模拟和创建虚拟三维世界。
本文将介绍D建模与动制作技术的基本原理、应用领域以及对于相关产业的影响。
一、基本原理D建模与动制作技术是基于计算机图形学的技术,主要包括建模、动画和渲染三个部分。
1. 建模:建模是D建模与动制作技术的基础,它是指通过计算机软件将真实物体或想象中的物体转化为三维模型的过程。
建模可以通过手工建模或者扫描等方式进行,常用的建模软件有3DMAX、Maya等。
2. 动画:动画是指将建模得到的静态三维模型通过一系列的动作帧展示出连续运动的过程。
动画制作需要根据物体的运动规律设置关键帧,并通过插值算法计算中间帧。
动画可以在时间和空间上模拟真实世界的物体运动。
3. 渲染:渲染是指将建模和动画得到的三维场景通过计算机图形学的渲染算法生成最终的图像或者动画。
渲染技术包括光照、阴影、材质等多个方面,它们可以使得虚拟场景更加真实、逼真。
二、应用领域D建模与动制作技术具有广泛的应用领域,以下是其中几个主要应用领域的介绍。
1. 电影制作:D建模与动制作技术为电影制作提供了强大的工具。
通过建模和动画,电影制作可以创建出真实世界所无法呈现的特效和场景。
例如,《阿凡达》这部电影就使用了D建模与动制作技术创建了完整的虚拟世界。
2. 动画制作:D建模与动制作技术是动画制作的重要组成部分。
通过建模和动画,动画制作可以更加便捷、高效地制作出复杂的角色和场景。
例如,《冰雪奇缘》这部电影中的角色和场景就是通过D建模与动制作技术制作的。
3. 游戏开发:游戏开发是另一个重要的D建模与动制作技术应用领域。
通过使用D建模与动制作技术,游戏开发人员可以创建出逼真而充满创意的游戏世界。
例如,《刺客信条》系列游戏中的古代城市和人物角色就是通过D建模与动制作技术制作的。
09计算机三维造型技术基础-2基本概念

浙江大学通识课程计算机三维造型技术基础主讲:蔡娥徐勤雁xqy200812@2009.3.2 三维造型技术基础•什么是形体的“维”?空间曲线、曲面是几维图形对象?•“图形”与“图像”是一回事吗?•计算机屏幕上缩放图形会改变形体的大小吗?怎样才能真正改变形体的大小?•三维造型与二维制图是什么关系?•在一个CAD软件上建立的三维模型能够被另外的CAD软件识别吗?怎样识别?本章内容2.1 三维造型相关概念简介2.2 三维造型的种类2.3 曲面造型原理2.4 图形交换标准2.5 三维造型系统组成图形处理基本概念图形对象视图变换与物体变换人机交互线框造型曲面造型实体造型参数化造型特征造型物体的“维”数,就是用来描述物体的自由度数0维物体点线面体1维物体2维物体3维物体点线面体1维物体(x-a)2+(y-b)2=r 2x=a+r*cos(t)y=b+r*sin(t)z=k*t平面曲线是1维物体空间曲线是1维物体维数= 变量数-方程数点线面体2维(x-a)2+(y-b)2+(z-c)2=r2物体曲面是2维物体维数= 变量数-方程数图形对象:点、一维的直线和平面曲线二维绘图图形对象:点、线、面、体三维造型“二维绘图”、“三维造型”的“维”不同于物体的“维”:维绘制图形所在的空间的维数原始放大进一步放大旋转软件可以绕任意轴、任意点旋转Freehand 、所有的CAD软件只能在图像平面内旋转MSPaint Photosho p等由点、线、面、体等几何要素和明暗、灰度、色彩等非几何要素构成的图和形图形图像表达方式矢量,方程光栅,点阵,像素理论基础计算机图形学计算机图像处理原理以图形的形状参数与属性参数来表示:形状参数:描述图形形状的方程的系数、线段的起止点等;属性参数:灰度、色彩、线型等用有灰度或色彩的点阵来表示每个点有各自的颜色或灰度,色块拼合而成的图形维数任意维形体:0维的点、1维的线、2维的面、3维的体平面图像,色块拼合而成,没有点、线、面、体的概念直观的理解数学方程描述的形体印刷品、绘画作品、照片1. 2.4.3.CAD 软件中涉及的图形对象:点真实的点对象Point ,可以执行编辑、删除等操作线面体图形对象的控制点,可以选中,但并非真实的图形对象,无法删除1.2.4.3.CAD 软件中涉及的图形对象:点线面体直线:二元一次方程Ax+By+C=0曲线平面曲线空间曲线基本曲线:用方程Ax 2+By 2+Cxy+Dx+Ey+F=0来表达自由曲线:解析表达;通过给定的控制点控制曲线的形状;Ferguson 曲线、Bazier 曲线、B 样条曲线和NUBRS 曲线;通过点构造曲线通过控制顶点构造曲线通过拟合构造曲线样条曲线的控制点控制多边形拟合线控制顶点通过点1.2.4.3.CAD 软件中涉及的图形对象:点线面体直线:二元一次方程Ax+By+C=0曲线平面曲线空间曲线基本曲线:用方程Ax 2+By 2+Cxy+Dx+Ey+F=0来表达自由曲线:解析表达;通过给定的控制点控制曲线的形状;Ferguson 曲线、Bazier曲线、B 样条曲线和NUBRS 曲线;相关曲线:通过曲线操作获得与原曲线相关的曲线,如偏置线、投射线、连接线等体的边缘Eage 并不是曲线对象Curve 不能创建、编辑或删除1.2.4.3.CAD 软件中涉及的图形对象:点平面Plain ,不是surface线面体曲面基本曲面:用确定的方程描述,如圆柱面、圆锥面、双曲面自由曲面:解析表达;有Coons 曲面、Bazier 曲面、B 样条曲面和NUBRS 曲面1. 2.4.3.CAD 软件中涉及的图形对象:点基本体素,块、柱、锥、球、环及其布尔操作线面体二维形体扫描基本形体+/-材料:凸台、孔细节处理:倒角、抽壳2.1 三维造型相关概念简介——变换视图变换1物体变换2相当于改变观察物体的视点,基于显示坐标系变换ZZXYE o XY世界坐标系显示坐标系视点坐标系XY(屏幕)(视点)基于物体在真实世界中的世界坐标系进行变换2.1 三维造型相关概念简介——坐标系三维形体透视图生成,坐标原点位于视点位置,某个坐标方向与视线一致。
课程总结-浙江大学-控制科学与工程学院

数字PID增量式:
T T u (k ) K c e(k ) e(k 1) s e( k ) d e( k ) 2e( k 1) e( k 2) Ti Ts u (k ) u (k 1) u (k )
微分先行的数字PID增量式
锅炉控制
锅炉控制问题与系统分解,汽包水位控制方 案,空燃比逻辑比值控制
精馏过程控制
精馏控制目标与系统分解,被控变量的选择, 常用控制问题与对应的常规控制方案,精馏 过程的节能控制方案
其它过程设备的控制
换热器出口温度控制方案,加热炉常用控制 问题与方案,化学反应器的控制问题与方案
常规的数字PID增量式:
Ts Td u (k ) K c e(k ) e(k 1) e(k ) e(k ) 2e(k 1) e(k 2) Ti Ts
微分先行PID增量式:
Ts Td u (k ) K c e(k ) e(k 1) e( k ) y f ( k ) 2 y f ( k 1) y f ( k 2) , Ti Ts u (k ) u (k 1) u (k )
“过程控制工程”课程总结
戴连奎 浙江大学控制学院 2017/06/15
第一部分:基本PID控制
过程动态特性分析
基于过程机理与基于过程数据的动态建模方法,过 程特性参数描述
单回路PID控制
控制阀的气开/气关选择、控制器正反作用的意义与 选择、PID控制器结构与参数整定,单回路PID控制 器的积分饱和现象及其防止
对象纯滞后补偿
Smith纯滞后补偿器,内模控制结构
FFD修改器建模
课堂小结1.变形修改器:(1)FFD修改器根据控制点可分为“FFD 2×2×2”、“FFD 3×3×3”和“FFD 4×4×4”3种形式,根据形状可分为“FFD (长方体)”和“FFD (圆柱体)”两种类型。
(2)“拉伸”修改器(3)“弯曲”修改器2.创建卡通企鹅模型关键:简单几何体、通过FFD修改器、“拉伸”、“弯曲”等修改器即可得到。
跟着教师的引导、进行自我小结。
3分钟实训作业创建圆柱体变形数学9模型。
记住实训作业内容,课后完成。
2分钟知识技能拓展利用本课题所讲知识,创建制作橘子模型。
板书设计任务二卡通企鹅——FFD修改器建模1.FFD修改器根据控制点可分为“FFD 2×2×2”、“FFD 3×3×3”和“FFD 4×4×4”3种形式,根据形状可分为“FFD (长方体)”和“FFD (圆柱体)”两种类型。
2.“拉伸”修改器:可沿指定轴向拉伸或挤压物体,在保持体积不变的前提下改变物体的形状。
3. “弯曲”修改器是对选中的对象进行均匀弯曲处理,也可以使用限制选项来限制物体的弯曲区域。
2.创建卡通企鹅模型关键:简单几何体、通过FFD修改器、“拉伸”、“弯曲”等修改器即可得到。
Photoshop在设计领域的应用进行细致的讲解,具体内容包括图像制作基础、软件基础操作、插画设计、Banner设计、App设计、H5设计、海报设计、网页设计、包装设计、综合设计实训等。
本书项目1 ~项目9先在“相关知识”中讲解基础知识,使学生了解图形图像处理的相关概念、要素和设计原则等;再通过“任务引入”引导学生了解每个任务学习的要点;通过“设计理念”展示设计的构思过程和主导思想;通过“任务知识”带领学生深入学习软件功能;通过“任务实施”指导学生快速熟悉图像的设计制作过程;通过“扩展实践”和“项目演练”提高学生的实际应用能力。
动画基本原则-浙江大学

● “没有任何一种物体会突然停止,物体的运动是一个部分
接着一个部分的” ,这是Walt Disney当初对于运动物体 的诠释,之后动画师将这样的理论以跟随动作或重叠动作 来称呼,我们可以用另一种更科学的方式来描述这个原理 ,就是“动者恒动” 。
Xiaogang Jin
23
11/20/2018
Follow-Through and Overlapping Action 跟随动作与重叠动作
动画基本原则
金小刚
Email: jin@
浙江大学CAD&CG国家重点实验室 紫金港校区蒙民伟楼512
Course web: /home/jin/3danimationcourse/3danimation.htm
【国家级精品课程】-浙江大学—《计算机游戏程序设计》-静态图元

3 创建场景
添加Static Geometry ➢第一件事是为我们刚才建立的Mesh创建一个Entity,然后创 建StaticGeometry实例.在createScene函数里添加下面代码:
➢size变量定义了要在多大面积之内种草. Amount变量 定义了在每一行要放多少个物体. 接着要定义size和 origin. ➢ 如果你要在一个点周围放这些物体,需要将origin的x和 z值设定为size x和z数值的一半.
➢用Quaternion来转个方向.在createGrassMesh函数,添加 下面代码:
3 创建场景
➢现在已经设定好变量了,接着需要定义手动对象 ManualObject.
➢RenderOperation需要设定为OT_TRIANGLE_LIST,意 味着在定义好顶点之后,需要创建面. ➢每个方形需要定义4个顶点.每个顶点要设定texture坐标, 它告诉Ogre如何使用Examples/GrassBlades material 中定义的材质.设定左上角点为(0,0),右下角点为(1,1).
谢谢!
3 创建场景
➢草变成草垛 ➢随机赋予x和z的值\旋转角度和垂直放大倍数. ➢定义了StaticGeomety之后需要调用addEntity,将 Entity加到Static Geomety的所有子节点中,参数为子节 点的位置,方向和缩放率. ➢最后,我们需要创建StaticGeomery令它被显示.
OGRE中的静态图 元
3062121002 崔鑫洋
1
内容
2
基础
3
创建场景
4
结论
目录
1 内容
在很多情况下,我们需要在场景中添加静态的物体。 比如, 一块石头或者一棵树…… Ogre为这种情况提供了StaticGeometry类,它允许你批渲染很 多物体.这个通常要比手动在SceneNodes添加要快多了. ➢StaticGeometry的基本使用方法 ➢ManualObject的使用方法.
决定曲面的弯曲程度r浙江大学

2019/10/17
CAD&CG国家重点实验室
31
使用方便
• 在使用时只需要指定溅水位置,溅水大小以及溅水激 烈程度,系统能自动生成用户需要的卡通溅水动画。
• 下图就是用系统生成的流星雨下落到海面上的溅水动 画,用手工绘制这种动画及其耗时!
2019/10/17
CAD&CG国家重点实验室
32
基于物理模型的溅水动画
2019/10/17
浙江大学
14
卡通流水模型
流水路径边线
人工指定两组控制点,插值得到 LBDi和RBDi,(i=1,…BdN)
波速与波距
波速WSpeed控制水波在两相邻画 面之间的沿边线的位移,用流水路径 边线上一些点所跨的距离来近似。
水面上两相邻水波之间的距离我们 称为波距,用WaveD表示。
A Cartoon Water Model for Stereo Animation 软件学报,2001,12(7)
2019/10/17
CAD&CG国家重点实验室
29
涟漪
• 纹理
以落水点为中心放置一系列半径逐渐 增加的同心圆,作为骨架;
骨架两侧各用一系列振幅、周期变化的 正弦半波曲线围成涟漪的形状。
• 水面
平面以表现安静的水面,或FFT方法生成有微波荡漾的水面。
• 动态 骨架向外辐射扩大,逐渐分裂,离物体越远分裂距离 越大。 涟漪的宽度随着向外辐射而变窄,最后消失。
2019/10/17
CAD&CG国家重点实验室
19
卡通流水着色-方案2
• 在两个水波基线之间添加渐变蓝色。 • 设两个相邻水波基线bc1和bc2,对它们进行线形插值得到
中间过渡基线(粉色)。 • 指定颜色c1和c2,对它们进行线形插值得到中间过渡颜色。
结合几何动力学卡通头发生成

结合几何动力学卡通头发生成
任阳春;赵洪德;耿卫东
【期刊名称】《计算机应用研究》
【年(卷),期】2010(027)006
【摘要】提出了一种结合几何动力学的卡通头发生成方法.它包括头发的几何建模和动力学模拟两个部分.在几何建模阶段:用户导入一个头部模型,交互指定头发生长区域控制点和头发模型中心控制点,系统自动生成卡通头发的几何模型.在动力学模拟阶段:引入基于网格的逆向动力学实现卡通头发运动.实验结果表明:系统通过简单的用户交互能够制作出令人满意的卡通头发.
【总页数】4页(P2384-2386,2390)
【作者】任阳春;赵洪德;耿卫东
【作者单位】浙江大学,CAD&CG国家重点实验室,杭州,310027;浙江大
学,CAD&CG国家重点实验室,杭州,310027;浙江大学,CAD&CG国家重点实验室,杭州,310027
【正文语种】中文
【中图分类】TP391
【相关文献】
1.高中数学解析几何中数形结合思想生成过程探析——由一道竞赛试题引发的思考[J], 周明亮
2.一种卡通动画中人物头发运动生成技术研究 [J], 欧训勇
3.几何画板与数学知识生成的结合的实践与思考——以《圆周角(第1课)》教学为例 [J], 郭日康;
4.高中数学解析几何中数形结合思想生成研究 [J], 杜现勇
5.高中数学解析几何中数形结合思想生成研究 [J], 杜现勇
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
方程如下
r=a*sin(t*) 这里t为时间,t=0时对应位置1,t=1时对应位置9。 参数a和眼睛高度h控制低头的程度。根据实验,
a/h=0.4~0.5之间较合适。
2019/5/6
浙江大学
27
旋转矩阵
• 利用旋转矩阵把三维头像进行旋转,
n1,n2,n3为旋转轴的方向余弦,
浙江大学
17
系统界面
2019/5/6
浙江大学
18
操作步骤 • 打开关键画面
• 指定骨骼: 在右面的骨骼指定工具条里面选取
所要提取的骨骼。
2019/5/6
浙江大学
19
操作步骤
• 提取骨骼:点击提取骨骼按钮,点击左键拖动,
释放的方式提取骨骼,对所有的骨骼通过这种 方式提取。最后如下图所示。
2019/5/6
• 用一个平行于Z-X的平面进行上下移动来切割由正面头像和侧面
头像构成的基本框架。如果切割m次,得到m组相交点,用样条 曲线分别对它们插值得到m个头步水平剖面,按切割平面高度把 它们堆砌起来获得三维头部形象。
2019/5/6
浙江大学
26
旋转轴设定
• 旋转轴对应于颈部中心轴,它控制头部的旋转状态。
从手工绘制的转头序列可以看到颈部中心再转头过程 中保持固定,而头顶部的运动轨迹可以用一玫瑰线来 近似。
计算机动画
浙江大学CAD&CG国家重点实验室
2019/5/6
浙江大学
1
人物走步建模
• 人物走步在向前运动过程中还要注意身体上
下移动,且移动应该用慢进慢出处理。
• 在动画中走步要避免僵硬,如一个怒气冲冲
的人走步时上身前倾,下巴朝前,如图。
2019/5/6
浙江大学
2
走步的变化
• 若用走步表现出骄傲的情绪,则身体略微后
• 其它如潜行等都可以用同样的方法处理。
2019/5/6
浙江大学
14
跑步的预备
2019/5/6
浙江大学
15
跑步运动中表现重量
2019/5/6
浙江大学
16
一个动画角色骨架提取系统
• 目标: 在手工绘制的人物或动物走步或跑步序
列中提取骨架;
• 利用上述提取的骨架信息控制一些形状元素,
生成动画
2019/5/6
的位移和转动的角度
• 对位移和旋转分别做quaternion插值 • 计算插值中某一时刻马各个关节的顶点数据 • 根据马的位置和运动方向对顶点数据做坐标变
换
• 根据视点位置再做坐标变换,投影,显示结果
2019/5/6
浙江大学
22
3D扩展
2019/5/6
浙江大学
23
一个转头模型
2019/5/6
浙江大学
2019/5/6
浙江大学
8
添加胳膊
• 添加胳膊
2019/5/6
浙江大学
9
身体协调
2019/5/6
浙江大学
10
跑步
• 跑步除了要用到走步的所有规律外还有其新特点。跑
步中身体上下运动被夸张以给出更急促的感觉。
• 在位置1接触地面那只脚把身体猛地推向上。 • 胳膊运动要比走步中激烈得多。 • 跑步要比走步跨出更大的距离。
浙江大学
20
操作步骤
• 保存骨骼:点击Up按钮,保存骨骼,然后在回
到第一步,等到所有的关键帧都提取完成以后, 我 们 通 过 点 击 file 中 的 “ 导 出 skeleton” 选 项 来导出骨骼数据。
2019/5/6
浙江大学
21
插值算法流程
• 根据关键帧图片提取关节点数据并保存为文件 • 载入文件数据 • 取相邻两帧做线性插值 • 对于插值两帧对应的骨骼,分别计算它们中点
在前,左腿在后,如(1),另一个是左腿在前, 右腿在后,如(9)。
• 然后画出中间画面(5),在该位置上右腿完全伸直
以支撑全身,此时身体位置因此抬高,左腿自然抬 高并弯曲向前。
2019/5/6
浙江大学
5
走步中腿部的动态模型
• 在手工绘制的走步序列
上用两矢量近似上腿和 下腿的骨架,然后测量 两个矢量的角度,得到 它们随着画面 i 变化的 关系图。从中我们可以 看到它们是非线性变化 的。
2019/5/6
浙江大学
6
走步速度的控制
• 上面的角度— i 只对应9幅画面,为了利用该变
化规律生成速度有变化的走步序列,用样条曲线 对这9个离散样点插值,然后对其弧长参数化,再 用不同区间间隔采样,得到角度加权值来控制不 同速度中的腿部动态。
2019/5/6
浙江大学
7
腿部动态局部控制
• 如果对腿部角度加权函数进行幅
s1=sin , c1=cos , =t*/2是旋转角度。
2019/5/6
浙江大学
28
边缘提取与隐线消除
• 边缘提取:计算各个剖面在X-Y平面上投影沿X轴方向
的大小极值,它们分别对应于头的右边和左边,然后 以一定顺序连接这些极值点画出头部边缘。
• 隐线消除:由于头像各部分是用曲线绘制的,把曲线
度调制,就有可能生成腿部抬升 角度不同的走步序列。
• 例如用一个因子
F=1+A*sin( i*/N)对加权函数 相乘(式中 i 表表示第 i 幅幅画 面的数标,N是一步内包含的画 面数),其结果是加权函数中间
几个值变大,在实际生成的走步
系列中表现为腿抬得高一些。根 据实验A的取值范围在0.1~0.3之 间效果比较好。
24
三维头像的构造
• 选取眼睛中心为参考点,计算出该点高度h以
及该高度上头像的侧面宽度w;
• 距头后部取w/3,过该点的垂直轴即为Y轴,
再把侧面头像的下巴放在坐标系的X-Z平面上。
2019/5/6
浙江大学
25
三维头像的构造
• 正面头像的中心对称轴与Y轴平行,画像所在平面与X-Y平面平
行,再把它的下巴放在z=w/5处。这个位置对应于侧面头像前 后的中间。
2019/5/6
浙江大学
11
跑步的时间分配
• 最少可以用3幅,用于表现狂跑(但感觉粗糙些) • 一般可用4幅画面表现跑步的一步。
2019/5/6
浙江大学
12
跑步的角度加权函数
2019/5/6
浙江大学
13
跑步的类型
• 跑步的类型也是多种多样。图中第一个得动感更强,
故感觉更强壮,有坚定的方向。第二个看上去比较弱, 不协调,更像一个累极了的马拉松运动员要到终点的 样子。
倾,在走步过程中的最高位置出伴有胸部和 肩部的动作。
2019/5/6
浙江大学
3
走步的时间分配
• 正常的走步用9幅画面表现跨出一步。小孩的
走步还可以快一些,比如用7幅画面。一个疲 惫的老人走步则有可能用13幅表现一步。
2019/5/6
浙江大学
4
走步中腿部的处理
• 先画出一步的两个关