基于ATmega16超声波测距开放实验报告
ATMEGA16单片机实验
ATMEGA16单⽚机实验实验⼀软件和硬件的认识⼀、实验⽬的:1、掌握硬件原理。
2、初步掌握实验板的使⽤⽅法。
3、熟悉软件⼯作界⾯。
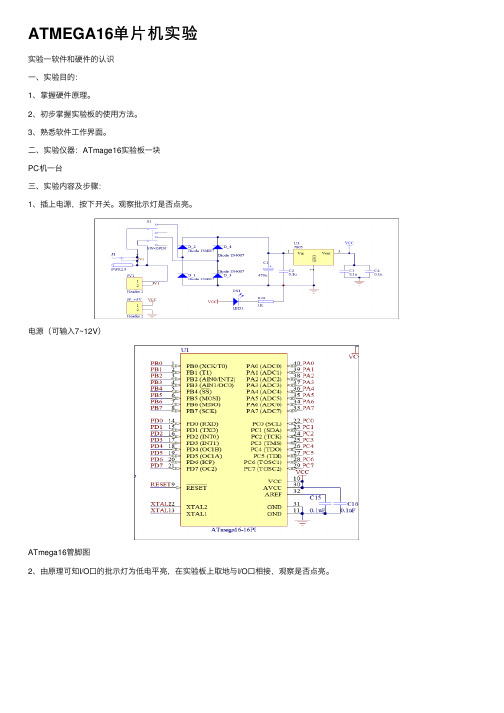
⼆、实验仪器:ATmage16实验板⼀块PC机⼀台三、实验内容及步骤:1、插上电源,按下开关。
观察批⽰灯是否点亮。
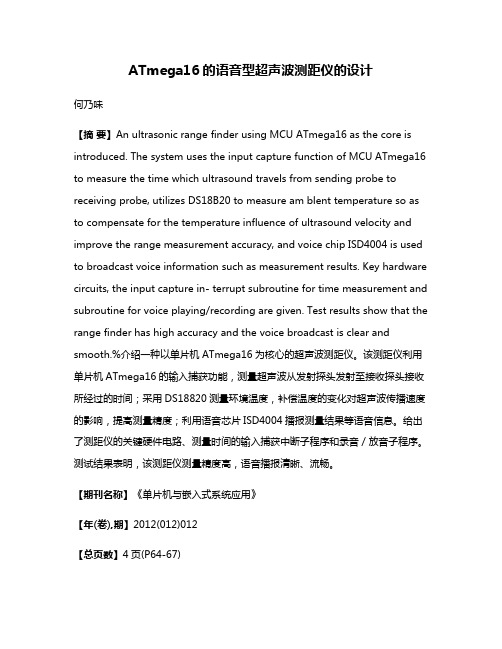
电源(可输⼊7~12V)ATmega16管脚图2、由原理可知I/O⼝的批⽰灯为低电平亮,在实验板上取地与I/O⼝相接,观察是否点亮。
I/O⼝LED显⽰与接⼝3、打开编程界⾯,点击各栏,认识各栏的⽤途。
A VRICC IDE 软件的⼯作界⾯4、输⼊以下程序:#includeint main(void){DDRA = 0xff;/* all outputs */DDRB = 0xff;/* all outputs */DDRC = 0xff; /*all outputs */DDRD = 0xff; /*all outputs */PORTA = 0x00; /* 输出低电平*/PORTB = 0x00; /* 输出低电平*/PORTC = 0x00; /* 输出低电平*/PORTD = 0x00; /* 输出低电平*/while(1);}观察I/O⼝的灯是否被点亮。
实验⼆I/O⼝的输⼊与输出⼀、实验⽬的:1、了解IO⼝的结构;2、熟悉IO⼝的特性;3、掌握IO⼝的控制。
⼆、实验仪器:ATmage16实验板⼀块PC机⼀台三、实验原理:作为通⽤数字I/O 使⽤时,A VR 所有的I/O 端⼝都具有真正的读-修改-写功能。
这意味着⽤SBI 或CBI 指令改变某些管脚的⽅向( 或者是端⼝电平、禁⽌/ 使能上拉电阻) 时不会改变其他管脚的⽅向( 或者是端⼝电平、禁⽌/ 使能上拉电阻)。
输出缓冲器具有对称的驱动能⼒,可以输出或吸收⼤电流,直接驱动LED。
所有的端⼝引脚都具有与电压⽆关的上拉电阻。
并有保护⼆极管与VCC 和地相连,如Figure23 所⽰。
在控制I/O时,分别由⽅向寄存器DDRX与数据寄存器PORTX控制I/O的状态,如下表。
超声波测距实验报告
超声波测距实验报告1. 实验目的1.掌握超声波测距的基本原理;2.熟悉超声波测距仪器的使用;3.培养实验操作能力和数据处理能力。
2. 实验原理超声波测距是利用超声波在空气中的传播速度和反射原理,通过测量超声波发射和接收之间的时间间隔来计算被测物体与测距仪之间的距离。
超声波在空气中的传播速度约为 340 m/s。
3. 实验器材与步骤3.1 器材1.超声波测距仪;2.连接线;3.测量物体。
3.2 步骤1.连接超声波测距仪与电源;2.打开超声波测距仪,进行自检;3.将测量物体放置在合适的位置;4.调整超声波测距仪的测量范围;5.记录测量数据;6.分析数据,计算距离。
4. 实验数据与分析本实验共进行五次测量,记录数据如下:序号 | 测量距离(cm) | 误差(cm) |— | ———— | ——– |1 | 150.0 | 2.0 |2 | 152.5 | 1.5 |3 | 148.0 | 2.0 |4 | 151.0 | 1.0 |5 | 149.5 | 1.5 |平均距离 = (150.0 + 152.5 + 148.0 + 151.0 + 149.5) / 5 = 150.0 cm最大误差 = 2.0 cm最小误差 = 1.0 cm5. 实验总结本次实验掌握了超声波测距的基本原理和操作方法,通过对测量数据的分析,得出被测物体与测距仪之间的平均距离为 150.0 cm,最大误差为 2.0 cm,最小误差为 1.0 cm。
实验结果表明,超声波测距技术在实际应用中具有较高的准确性和可靠性。
6. 建议与改进1.在实验过程中,要确保测量物体与测距仪之间的距离在测距仪的测量范围内;2.提高实验操作技巧,减小人为误差;3.后续可以尝试使用不同类型的超声波测距仪进行实验,比较其性能和精度。
7. 实验拓展7.1 超声波测距的应用领域超声波测距技术广泛应用于工业、农业、医疗、交通、安防等领域,例如:1.工业领域:测量物体的尺寸、厚度、距离等;2.农业领域:测量土壤湿度、作物高度等;3.医疗领域:测量人体内部器官的距离、厚度等;4.交通领域:车辆测距、速度检测等;5.安防领域:监控设备、报警系统等。
ATmega16的语音型超声波测距仪的设计
ATmega16的语音型超声波测距仪的设计何乃味【摘要】An ultrasonic range finder using MCU ATmega16 as the core is introduced. The system uses the input capture function of MCU ATmega16 to measure the time which ultrasound travels from sending probe to receiving probe, utilizes DS18B20 to measure am blent temperature so as to compensate for the temperature influence of ultrasound velocity and improve the range measurement accuracy, and voice chip ISD4004 is used to broadcast voice information such as measurement results. Key hardware circuits, the input capture in- terrupt subroutine for time measurement and subroutine for voice playing/recording are given. Test results show that the range finder has high accuracy and the voice broadcast is clear and smooth.%介绍一种以单片机ATmega16为核心的超声波测距仪。
该测距仪利用单片机ATmega16的输入捕获功能,测量超声波从发射探头发射至接收探头接收所经过的时间;采用DS18820测量环境温度,补偿温度的变化对超声波传播速度的影响,提高测量精度;利用语音芯片ISD4004播报测量结果等语音信息。
超声波测距实验报告

目录1、课题设计的目的和意义 (3)2、课题要求 (3)2.1、基本功能要求 (3)2.2、提高要求 (4)3、重要器件功能介绍 (4)3.1、CX20106A红外线发射接收专用芯片 (4)3.2、AT89C51系列单片机的功能特点 (5)3.3、ISD1700优质语音录放电路 (6)4、超声波测距原理 (8)4.1、超声波测距原理图 (8)4.2、超声波测距的基本原理 (9)5、硬件系统设计 (10)5.1、超声波发射单元 (10)5.2、超声波接收单元 (11)5.3、显示单元 (11)5.4、语音单元 (12)5.5、硬件设计中遇到的难题: (12)6、系统软件设计 (14)7、调试与分析 (15)7.1调试 (15)7.2误差分析 (15)8、总结 (16)9、附件 (17)9.1、总电路 (17)9.2、主要程序 (18)10、参考文献 (22)1课题设计的目的及意义随着科学技术的快速发展,超声波在测距仪中的应用越来越广,但就目前技术水平而言,人们可以利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波测距作为一种新型的非常重要有用的工具在各方面都有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求。
如声纳的发展趋势:研究具体的高定位精度的被动测距声纳,以满足军事和渔业等的发展需求,实现远程的被动探测和识别。
毋庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
超声波测距在某些场合有着显著的优点,因为这种方法是利用计算超声波在被测物体和超声波探头之间的传输来测量距离的,因此它是一种非接触式的测量,所以他就能够在某些场合或环境比较恶劣的环境下使用。
比如测有毒或者有腐蚀性化学物质的液面高度或者高速公路上快速行驶汽车之间的距离。
随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最注重发展到具有创造力。
超声测距实验报告

超声测距实验报告一、实验目的本次超声测距实验的主要目的是研究和掌握利用超声波进行距离测量的原理和方法,并通过实际操作和数据分析,评估测量系统的精度和可靠性。
二、实验原理超声波是一种频率高于 20kHz 的机械波,其在空气中传播时具有良好的指向性和反射特性。
超声测距的基本原理是利用超声波在发射后遇到障碍物反射回来的时间差来计算距离。
具体计算公式为:距离=(超声波传播速度×传播时间)/ 2 。
在常温常压下,空气中超声波的传播速度约为 340 米/秒。
通过测量超声波从发射到接收的时间间隔 t,就可以计算出距离。
三、实验仪器与材料1、超声测距模块:包括发射探头和接收探头。
2、微控制器:用于控制超声模块的工作和处理数据。
3、显示设备:用于显示测量结果。
4、电源:为整个系统供电。
5、障碍物:用于反射超声波。
四、实验步骤1、硬件连接将超声测距模块的发射探头和接收探头正确连接到微控制器的相应引脚。
连接电源,确保系统正常供电。
将显示设备与微控制器连接,以便显示测量结果。
2、软件编程使用相应的编程语言,编写控制超声模块工作和处理数据的程序。
实现测量时间的计算和距离的换算,并将结果输出到显示设备。
3、系统调试运行程序,检查系统是否正常工作。
调整发射功率和接收灵敏度,以获得最佳的测量效果。
4、测量实验将障碍物放置在不同的距离处,进行多次测量。
记录每次测量的结果。
五、实验数据与分析以下是在不同距离下进行多次测量得到的数据:|距离(米)|测量值 1(米)|测量值 2(米)|测量值 3(米)|平均值(米)|误差(米)||||||||| 05 | 048 | 052 | 050 | 050 | 000 || 10 | 095 | 105 | 100 | 100 | 000 || 15 | 148 | 152 | 150 | 150 | 000 || 20 | 190 | 205 | 195 | 197 | 003 || 25 | 240 | 255 | 245 | 247 | 003 || 30 | 290 | 305 | 295 | 297 | 003 |通过对实验数据的分析,可以看出在较近的距离(05 米至 15 米)内,测量误差较小,基本可以准确测量。
超声波测距仪实训报告
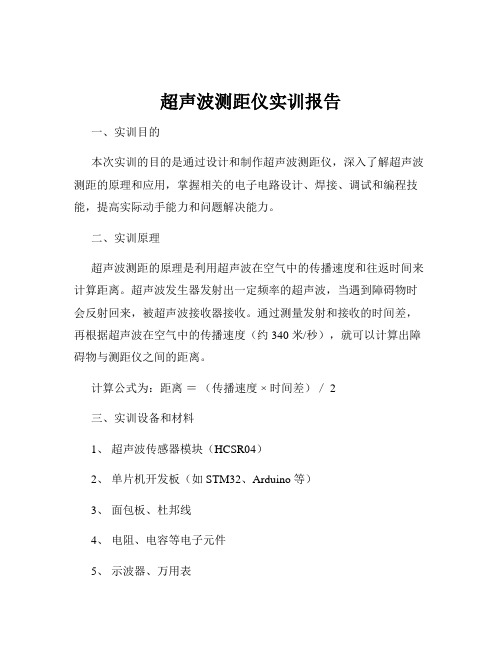
超声波测距仪实训报告一、实训目的本次实训的目的是通过设计和制作超声波测距仪,深入了解超声波测距的原理和应用,掌握相关的电子电路设计、焊接、调试和编程技能,提高实际动手能力和问题解决能力。
二、实训原理超声波测距的原理是利用超声波在空气中的传播速度和往返时间来计算距离。
超声波发生器发射出一定频率的超声波,当遇到障碍物时会反射回来,被超声波接收器接收。
通过测量发射和接收的时间差,再根据超声波在空气中的传播速度(约 340 米/秒),就可以计算出障碍物与测距仪之间的距离。
计算公式为:距离=(传播速度 ×时间差)/ 2三、实训设备和材料1、超声波传感器模块(HCSR04)2、单片机开发板(如 STM32、Arduino 等)3、面包板、杜邦线4、电阻、电容等电子元件5、示波器、万用表6、电脑及编程软件四、实训步骤1、硬件电路设计将超声波传感器模块与单片机开发板连接,根据模块的引脚定义和开发板的接口,使用杜邦线进行连接。
连接电源和地,确保电路的供电正常。
2、软件编程选择相应的编程环境,如 Arduino IDE 或 Keil 等。
编写控制程序,实现超声波的发射和接收,并计算距离。
通过串口将测量的距离数据发送到电脑上进行显示。
3、电路焊接与调试如果需要制作永久性的电路,可以将元器件焊接在电路板上。
使用示波器和万用表检查电路的工作状态,确保信号的正常传输。
4、系统测试将制作好的超声波测距仪放置在不同的距离处,测量并记录数据。
分析测量结果的准确性和稳定性,对系统进行优化和改进。
五、遇到的问题及解决方法1、信号干扰在实际测量中,发现测量结果有时会出现较大的误差,经过检查发现是由于周围环境中的电磁干扰导致的。
解决方法是增加滤波电容,提高电路的抗干扰能力。
2、测量范围有限超声波测距仪的测量范围受到传感器性能和环境因素的影响。
为了扩大测量范围,尝试调整发射功率和接收灵敏度,但效果不明显。
最终通过更换性能更好的超声波传感器模块解决了问题。
超声波测距实验报告

超声波测距实验报告一.实验规划1.在网上寻找同型号超声波原理图,并理解。
2.向学长询问队里关于超声波测距的资料。
3,根据资料将硬件电路搭好,然后一边消化资料,一边学习单片机的相关知识。
4,将上一届的程序看懂,然后稍加改动,以适应自己的单片机开发板环境。
5,有不懂得地方,先自己琢磨,实在琢磨不透就请教队里的学长和学姐。
6,不断地调试程序,使得测距更加精准。
7,进行距离和角度测量的实验,并记录数据8,进行数据分析,探究影响超声波测距精度的原因以及传感器性能的好坏。
二.数据处理超声波发散角的大小被测物体表面平整实际距离11.1 16.1 21.1 26.1 31.1 36.1 41.1 46.1 51.1 56.1 61.1 66.1 71.1 76.1 81.1 86.1 91.1 96.1 101.1 显示距离10.2 15.5 20.5 25.9 30.7 35.7 40.7 45.3 51.1 55.7 61 66.1 71.1 76.3 81.2 86.3 91.5 95.9 101.3 误差大小0.9 0.6 0.6 0.2 0.4 0.4 0.4 0.8 0 0.4 0.1 0 0 0.2 0.1 0.2 0.4 0.2 0.2被测物体表面凹凸不平显示值9.2 14,5 20.8 25.9 30.4 35.6 41 45.5 51.1 58.6 61.6 66.3 71.9 76.2 81.4 86.5 91.2 96.8 102.1 实际值11.1 16.1 21.1 26.1 31.1 36.1 41.1 46.1 51.1 56.1 61.1 66.1 71.1 76.1 81.1 86.1 91.1 96.1 101.1 误差1.2 1.6 0.3 0.2 0.7 0.5 0.1 0.6 02.5 0.5 0.2 0.8 0.1 0.3 0.4 0.1 1被测物体的长为91cm,宽为61cm实际值1111213141516171819202122232425262728293031323334353637383940显示值99.419.7119.413140.5149.8160.4170.2180.7190.1200.5210.9220.4231.1240.5250.9260.2271.1279.8290.9301.8309.7320.7330.3341.4351.1361.7371.3381.2391.6400.1误差0.6.30.6-0.50.2-0.4-0.2-0.7-0.1-0.5-0.9-0.4-1.1-0.5-0.9-0.2-1.10.2-0.9-0.80.30.7-0.3-1.4-1.1-1.7-1.3-1.2-1.6-0.1被测物体长为60cm,宽为45cm实际值1111213141516171819202122232425262728293031323334353637383940显示值99.511.9119.613.8140.9150.1160.7170.6180.6189.6200.2211.7220.6230.9241.1250.7260.3270.5281.3291.3300.9311.6322332.4342.2352.1362.5272.7382.1392.7403.4误差值0.5-.9.4-.8-0.9-0.1-0.7-0.6-0.60.4-0.2-1.7-0.6-0.9-1.1-0.7-0.3-0.5-1.3-1.3-0.9-1.6-2-2.4-2.2-2.1-2.5-2.7-2.1-2.7-3.4三.实验总结1前四组实验数据,超声波传感器所测为1m以内的实物的距离,实验结果表明测量精度与被测物体表面积有关,与被测物体的表面平整程度无关,超声波的发散角与被测物体的距离有关,且与被测物体距离越近,超声波发散角越大,(在10cm以内接近40)当与被测物体距离超过56cm时,发散角在15度以内。
超声波测距实习报告

一、实习背景随着科技的不断发展,超声波测距技术逐渐在各个领域得到广泛应用。
为了提高自身实践能力,了解超声波测距技术在实际应用中的原理和操作,我参加了本次超声波测距实习。
二、实习目的1. 了解超声波测距的基本原理及工作流程;2. 掌握超声波测距仪的使用方法及注意事项;3. 培养动手能力和团队合作精神;4. 提高对超声波测距技术在实际应用中的认识。
三、实习内容1. 超声波测距原理及工作流程超声波测距是利用超声波在介质中传播的速度和反射原理来测量距离的一种技术。
当超声波发射器发出超声波后,在遇到障碍物时,部分超声波会被反射回来。
通过测量发射超声波和接收反射超声波之间的时间差,可以计算出障碍物与测距仪之间的距离。
超声波测距工作流程如下:(1)发射器发射超声波;(2)超声波遇到障碍物后反射回来;(3)接收器接收反射回来的超声波;(4)计算发射和接收之间的时间差;(5)根据超声波在介质中的传播速度,计算出障碍物与测距仪之间的距离。
2. 超声波测距仪的使用方法及注意事项(1)使用前,确保超声波测距仪的电源充足,避免因电量不足导致测量误差;(2)将测距仪放置在平稳的表面上,避免因震动导致测量误差;(3)调整测距仪的量程,使其适应被测物体的距离;(4)根据需要,调整测距仪的发射角度,确保超声波能够有效传播;(5)在测量过程中,避免测距仪受到其他信号的干扰;(6)测量完成后,关闭测距仪,确保设备安全。
3. 实际操作在实习过程中,我们使用超声波测距仪对实验室内的物体进行了测量。
具体操作如下:(1)将测距仪放置在平稳的桌面上;(2)调整测距仪的量程,使其适应被测物体的距离;(3)调整测距仪的发射角度,确保超声波能够有效传播;(4)按下测距仪的测量按钮,开始测量;(5)观察测距仪的显示屏,读取测量结果;(6)重复以上步骤,对多个物体进行测量。
四、实习心得通过本次超声波测距实习,我深刻认识到以下几方面:1. 超声波测距技术在实际应用中的重要性;2. 掌握超声波测距仪的使用方法及注意事项对于提高测量精度至关重要;3. 动手能力在实践过程中得到了锻炼,为今后的工作积累了宝贵经验;4. 团队合作精神在实习过程中得到了体现,为今后的团队协作打下了基础。
超声波测距实验报告

超声波测距模块工作原理
超声波发射器发射 一组超声波脉冲
脉冲遇到物体后反 射回来
超声波接收器接收 反射回来的脉冲
通过计算发射和接 收脉冲之间的时间 差,得到物体与传 感器之间的距离
编写Arduino程序,控制 超声波传感器发送和接收 信号
连接Arduino板与电脑, 上传程序并运行
调整超声波传感器的角度 和位置,确保测量距离准 确
开始测量
准备超声波传感器和Arduino板 连接超声波传感器和Arduino板 编写程序,设置触发和接收引脚 启动Arduino板,开始测量距离
数据记录和处理
添加标题
添加标题
添加标题
添加标题
拓展应用场景:将超声波测距技术 应用于更多领域,如自动驾驶、智 能机器人等。
降低成本:通过优化设计和生产工艺, 降低超声波传感器和测距系统的成本, 使其更广泛地应用于各种领域。
感谢您的观看
汇报人:XX
实验步骤
准备实验器材
超声波传感器 添加标题
连接线 添加标题
添加标题 Arduino开发板
添加标题 面包板
跳线 添加标题
测量工具 添加标题
添加标题 电脑和软件
添加标题 实验环境
搭建实验装置
准备超声波传感器、 Arduino板、面包板、跳 线等材料
连接超声波传感器与 Arduino板的引脚
连接Arduino板与面包板 的引脚
学会使用超声波传感器进行距离测 量
学会分析实验数据,得出结论
掌握数据处理和分析技巧
学习如何使用超声波传感器进行距 离测量
单片机超声波测距实习报告

一、实习背景随着科技的不断发展,单片机技术在各个领域得到了广泛应用。
超声波测距技术作为一种非接触式测量方法,具有精度高、稳定性好、抗干扰能力强等优点,在工业自动化、智能家居、机器人等领域有着广泛的应用前景。
本实习报告旨在通过单片机超声波测距实验,了解超声波测距原理,掌握单片机编程技巧,并实现一个简单的超声波测距系统。
二、实习目的1. 理解超声波测距原理,掌握超声波传感器的工作原理。
2. 掌握单片机编程技巧,实现超声波测距功能。
3. 了解超声波测距系统在实际应用中的注意事项。
三、实习内容1. 超声波测距原理超声波测距原理基于声波在介质中传播的速度和距离的关系。
当超声波发射器发出超声波信号后,遇到障碍物会发生反射,反射信号被接收器接收。
根据超声波发射和接收的时间差,可以计算出障碍物与传感器的距离。
2. 实验设备(1)51单片机开发板(2)HC-SR04超声波测距模块(3)蜂鸣器(4)LED灯(5)面包板、连接线3. 实验步骤(1)搭建实验电路将51单片机开发板、HC-SR04超声波测距模块、蜂鸣器、LED灯等元器件按照电路图连接到面包板上。
(2)编写程序使用C语言编写单片机程序,实现以下功能:1)初始化51单片机、HC-SR04超声波测距模块、蜂鸣器、LED灯等外围设备。
2)使用定时器0产生定时中断,定时检测HC-SR04超声波测距模块的回波信号。
3)根据超声波往返时间计算距离,并显示在LCD显示屏上。
4)当距离小于设定值时,蜂鸣器发出报警声,LED灯亮起。
(3)编译、下载程序将编写好的程序编译并下载到51单片机开发板上。
(4)测试与调试连接LCD显示屏,观察距离显示是否正常。
调整HC-SR04超声波测距模块与障碍物的距离,测试报警声和LED灯是否正常工作。
四、实习结果与分析1. 实验结果通过实验,成功实现了超声波测距功能。
当距离小于设定值时,蜂鸣器发出报警声,LED灯亮起。
2. 分析(1)超声波测距原理正确,程序编写无误。
超声波测距实验报告
超声波测距系统实物设计报告一.设计要求1.测量距离不小于0.3米,数字显示清晰,无数字叠加,动态显示测量结果,更新时间约为0.5秒左右。
2.测量精度优于0.1米,显示精度0.01米。
3.距离小于0.3米时,蜂鸣器发出”嘀嘀”报警。
4.测量距离超过1.0米时,指示灯显示超量程。
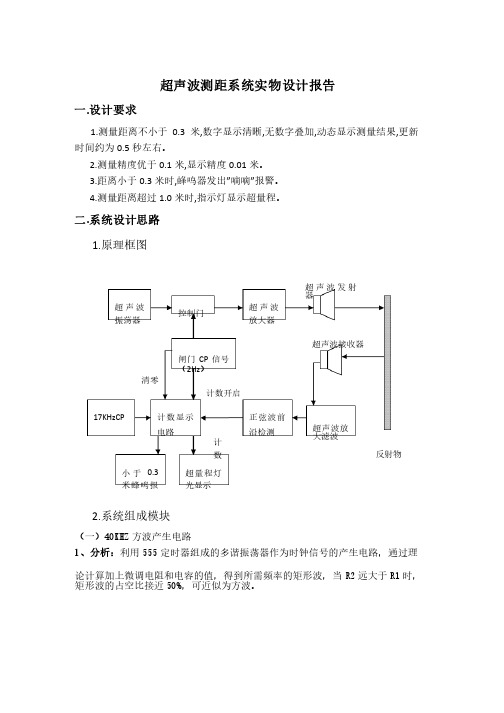
二.系统设计思路1.原理框图2.系统组成模块(一)(一)40KHZ 40KHZ 方波产生电路1、分析:利用555定时器组成的多谐振荡器作为时钟信号的产生电路,通过理论计算加上微调电阻和电容的值,得到所需频率的矩形波,当R2远大于R1时,矩形波的占空比接近50%50%,可近似为方波。
,可近似为方波。
超声波振荡器控制门超声波放大器闸门CP 信号(2Hz )计数开启清零计数超声波放大滤波正弦波前沿检测超声波接收器超量程灯光显示小于0.3米蜂鸣报计数显示电路反射物超声波发射器17KHzCP 2、单元电路如下图;3、参数计算:4、仿真结果:(二)(二)2Hz 2Hz 时钟信号发生电路:时钟信号发生电路:1、分析:利用555定时器组成的多谐振荡器作为时钟信号的产生电路,定时器组成的多谐振荡器作为时钟信号的产生电路,通过通过理论计算加上调整电阻和电容的值,得到所需频率的矩形波。
其中占空比在70%70%以上。
以上。
以上。
2、单元电路如下所示:参数计算:R1=710K 欧,R2=375欧,C1=1微F (三)17kHz 时钟信号发生电路:时钟信号发生电路:1、分析:利用555定时器组成的多谐振荡器作为时钟信号的产生电路,定时器组成的多谐振荡器作为时钟信号的产生电路,通过通过理论计算加上调整电阻和电容的值,得到所需频率的矩形波。
理论计算加上调整电阻和电容的值,得到所需频率的矩形波。
2、单元电路如下所示:3、参数计算:R1=1K 欧,R2=395欧,C5=47nf ;4、仿真5、功能:数字显示的测量结果要求动态更新时间约0.5秒左右,所以要求一个频率约2Hz 的时钟信号来控制刷新数据,保证结果显示稳定不闪烁。
超声波测距实验报告
超声波测距实验报告超声波测距实验报告引言:超声波测距是一种常见的测量技术,广泛应用于工业、医学和科学研究领域。
通过发射超声波并测量其返回时间,我们可以计算出被测物体与传感器之间的距离。
本实验旨在探究超声波测距的原理和应用,并通过实际操作验证其可靠性和准确性。
实验步骤:1. 实验器材准备:超声波传感器、数字示波器、计算机等。
2. 连接电路:将超声波传感器与数字示波器和计算机相连。
3. 设置参数:根据实验要求,设置传感器的工作频率和测量范围。
4. 发射超声波:通过控制电路,使传感器发射超声波信号。
5. 接收信号:传感器接收到返回的超声波信号,并将其转换为电信号。
6. 数据处理:将接收到的信号传输到计算机,并使用相应的软件进行数据处理和分析。
7. 计算距离:根据超声波的传播速度和返回时间,计算被测物体与传感器之间的距离。
实验结果:经过多次实验,我们得到了一系列距离数据,并进行了统计和分析。
结果表明,超声波测距的准确性较高,误差在合理范围内。
同时,我们还观察到在不同环境条件下,超声波的传播和测量结果可能会受到一定的影响。
例如,声波在空气中的传播速度与温度和湿度有关,因此在不同的环境下,需要进行相应的修正。
实验讨论:超声波测距技术在许多领域中都有广泛应用。
在工业领域,它可以用于测量物体的距离、检测障碍物并进行避障等。
在医学领域,超声波测距被应用于超声诊断、医学成像等。
此外,超声波测距还可以用于地震勘探、水下探测等科学研究领域。
然而,超声波测距也存在一些局限性。
首先,超声波在传播过程中会受到物体的吸收、散射和衍射等影响,从而导致信号衰减和失真。
其次,超声波的传播速度与介质的性质和温度有关,因此在不同的介质中,需要进行相应的修正和校准。
此外,超声波测距还受到传感器的分辨率和灵敏度等因素的限制,影响了其测量的精确度。
结论:通过本次实验,我们深入了解了超声波测距的原理和应用。
实验结果表明,超声波测距是一种准确可靠的测量技术,具有广泛的应用前景。
基于单片机超声波测距项目实验报告

电子信息工程系实验报告课程名称:1、信号检测与控制2、单片机技术与应用3、印刷电路板设计与制板工艺班级:应电0933班实训者姓名:左兴华柴理会学号:0919013319 0919013317 指导老师:方跃春李桂平张艳阳时间:2010年12月目录一、-----------------------实验背景二、-----------------------实验原理三、-----------------------实验设备四、-----------------------实验目的五、-----------------------实验内容六、-----------------------实验步骤七、-----------------------实验作品展示八、-----------------------实验体会九、-----------------------附超生波测距汇编程序一、实验背景在科学技术高速发展的今天,超生波的在测距中的应用也越来越广。
但目前我们的技术还是有限,为了推动我们电子信息工程系同学对其的兴趣发展,所以我们电子信息工程系教研室的老师们策划了一个基于单片机超声波测距仪项目的课程设计。
同时也是为了老师考察电子系同学们在前一学年在单片机应用技术课程,传感器技术应用课程和印刷电路板的设计与工艺课程学习情况。
也是对电子信息工程系的学生们动手能力的一种锻炼,及高职院校学生综合素质的一种培养。
设计超声波测距仪用专用的集成电路的成本很高, 并且没有显示,操作比较不方便。
本文结合超声波精确测距的需要,尝试用STC89C52 单片机为核心的低成本、简单实现收发功能、小型化数字显示超声波测距的硬件电路和软件设计方法。
二、实验原理超声波是一种在弹性介质中的机械振荡,传播速度仅为光波的百万分之一,超声波对色彩,光照度,外界光线和电磁场不敏感,因此超声波测距对于被测物处于黑暗,有灰尘或烟雾,强电磁干挠,有毒等恶劣的环境下有一定的适用能力,在液体测位,机器人避障和定位,倒车雷达、物体识别等方面有广泛应用。
基于ATmega16单片机的超声测距系统研究
基于ATmega16单片机的超声测距系统研究王晋【摘要】With the continuous development of ultrasonic technology, ultrasonic ranging technology continues to mature. In this paper, based on the current application of ultrasonic distance measurement, using ATmega16 single chip microcomputer as main control chip, a kind of ultrasonic ranging system is designed. With ultrasonic transmission speed in order to determine the conditions for the system, using a ultrasonic wave and return between the time difference to measure distance under test. System hardware circuit is mainly composed of transmitting circuit, receiving circuit, detection circuit, display circuit, temperature and other components of the circuit, finally, the implementation of ultrasonic ranging software programming. Non-contact measuring method used in this system, has the very good anti-jamming capability, and has the advantages of easy to use, the price is cheap.%随着超声技术的不断发展,超声测距技术不断成熟。
(完整版)超声波测距的毕业设计开题报告
历史上使用超声波来测量距离是从第二次世界大战时海军的声纳技术的发展开始。声纳是一种利用声波在水下测定目标距离和运动速度的仪器。经过几个世纪,科学家们对此反复研究,最终发现了超声波的原理。
超声波测距应用于各种工业领域,如工业自动控制,建筑工程测量和机器人视觉识别等方面。超声波作为一种检测技术,采用的是非接触式测量,由于它具有不受外界因素影响,对环境有一定的适应能力,且操作简单、测量精度高等优点而被广泛应用。这些特点可使测量仪器不受被测介质的影响,大大解决了传统测量仪器存在的问题,比如,在粉尘多情况下对人引起的身体接触伤害,腐蚀性质的被测物对测量仪器腐蚀,触电接触不良造成的误测等。此外该技术对被测元件无磨损,使测量仪器牢固耐用,使用寿命加长,而且还降低了能量耗损,节省人力和劳动的强度。因此,利用超声波检测既迅速、方便、计算简单,又易于实时控制,在测量精度方面能达到工业实用的要求。
第 13 周:论文修改;
第 14 周:准备答辩;
第 15 周:答辩。
(1)、根据系统的功能要求确定选用的元器件;
(2)、分配单片机各个P口地址,以连接对应的元器件,方便控制;
(3)、利用DXP软件构建系统的硬件图;
2、确定软件部分的设计方案:
(1)、确定各部分模块对应要实现的功能,并根据连接图写出对应程序中对应的控制信息,便于软件编写;
(2)、用keil软件编写程序,对应各模块功能模块化编写,便于程序的检查和调试;
计量学在制造业中越来越重要。直接在机器上测量尤其能推动制造业的发展。目前为止大部分还是采用视觉的或触觉的测量方法。但是墙的厚度就不能用这些来测量,因此德国人把超声系统结合到机器设计出了测距方法。随着超声波的发展,早在2000年时英国人就设计出了可观察、识别并测距的超声波集成系统。
超声波测距实训报告

超声波测距实训报告
超声波测距实训报告
一、实验目的
1. 掌握超声波测距的原理和方法;
2. 学习使用超声波模块进行测距;
3. 验证超声波测距的准确性和可靠性。
二、实验原理
超声波测距原理是利用超声波传播速度较快、能够穿透介质的特性来测量距离的一种方法。
通过发射超声波信号并接收回波信号,根据信号的往返时间来计算距离。
超声波模块一般由超声波传感器和控制电路组成。
超声波传感器会发射一束超声波信号,并接收回波信号。
控制电路会计算信号往返时间,并转换为距离值。
三、实验步骤
1. 将超声波模块与Arduino主板通过引脚连接;
2. 在Arduino上编写程序,设置超声波模块的引脚模式,并读取距离值;
3. 将Arduino通过USB线连接到电脑上,并上传程序;
4. 打开串口监视器,观察并记录测得的距离值;
5. 移动障碍物,再次记录距离值,并与实际距离进行对比。
四、实验数据
实验中我们测得的距离值如下:
实际距离(cm)测得距离(cm)
10 9.8
20 19.6
30 29.4
五、实验结果分析
通过实验数据可以看出,超声波测距的结果与实际距离十分接近,测距精度较高。
但是由于超声波信号的传播受到环境影响,如空气温度、湿度等,可能会有一定的误差。
同时,超声波测距的有效范围也受限于传感器的特性。
六、实验结论
通过本次实验,我们成功掌握了超声波测距的原理和方法,并验证了其准确性和可靠性。
超声波测距在实际应用中具有较高的测量精度和稳定性,广泛用于物体检测、避障等领域。
单片机超声波测距实习报告

实习报告:基于单片机的超声波测距系统设计与实现一、实习背景及目的随着科技的不断发展,超声波测距技术在工业生产、机器人导航、自动驾驶等领域得到了广泛的应用。
本次实习旨在学习和掌握单片机超声波测距系统的设计与实现,提高自己的实际动手能力和创新能力。
二、实习内容与过程1. 了解超声波测距原理超声波测距原理是利用超声波在传播过程中,遇到障碍物时会产生反射现象,通过测量发射超声波和接收反射波之间的时间差,计算出障碍物与测距仪之间的距离。
2. 选定硬件平台本次实习选用AT89C51单片机作为控制核心,配合超声波发射接收模块、信号处理电路、显示电路等构成超声波测距系统。
3. 设计硬件电路根据超声波测距原理,设计超声波发射接收模块、信号处理电路、环境温度检测电路等。
其中,超声波发射接收模块负责发射超声波并接收反射波;信号处理电路对接收到的信号进行放大、滤波等处理,以便单片机能够准确地捕捉到信号;环境温度检测电路用于补偿超声波传播速度受温度影响产生的误差。
4. 编写程序代码利用C语言编写程序代码,实现单片机对超声波发射接收模块的控制、信号处理以及距离计算等功能。
程序主要包括以下几个部分:(1)初始化单片机,配置IO口、定时器等;(2)控制超声波发射接收模块发射超声波,并等待接收反射波;(3)对接收到的信号进行处理,提取有效信号;(4)计算反射波与发射波之间的时间差,并根据超声波传播速度计算距离;(5)将计算得到的距离显示在LCD屏幕上。
5. 系统调试与优化通过反复实验,对超声波测距系统进行调试和优化,提高测距精度和稳定性。
主要针对以下几个方面进行调整:(1)调整超声波发射接收模块的灵敏度,以适应不同距离的测量;(2)优化信号处理算法,提高对噪声的抗干扰能力;(3)根据环境温度变化,调整超声波传播速度的补偿系数。
三、实习成果与分析通过本次实习,成功设计并实现了基于单片机的超声波测距系统,实现了对不同距离的准确测量。
基于单片机的超声波测距系统试验报告
基于单片机得超声波测距系统实验报告一、实验目得1、了解超声波测距原理;2.根据超声波测距原理,设汁超声波测距器得硬件结构电路;3.对设il•得电路进行分析能够产生超声波,实现超声波得发送与接收,从而实现利用超声波方法测量物体间得距离;4.以数字得形式显示所测量得距藹;5、用蜂鸣器与发光二极管实现报警功能、二、实验内容1、认真研究有关理论知识并大量査阅相关资料,确定系统得总体设讣方案,设计岀系统框图;2.决左各项参数所需要得碾件设施,完成电路得理论分析与电路模型构造。
3。
对各单元模块进行调试与验证;4、对单元模块进行整合,整体调试;5.完成原理图设讣与硬件制作;6.编写程序与整体调试电路;7。
写出实验报告并交于老师验收。
三、实验原理超声波测距就是通过不断检测超声波发射后遇到障碍物所反射得回波,从而测出发射与接收回波得时间差t,然后求出距S二C t /2,式中得C为超声波波速。
由于超声波也就是一种声波,其声速C与温度有关。
在使用时,如果温度变化不大,则可认为声速就是基本不变得。
如果测距精度要求很髙,则应通过温度补偿得方法加以校正、声速确龙后,只要测得超声波往返得时间,即可求得距离。
这就就是超声波测距仪得机理,单片机(AT89C51)发出短暂得40kHz信号,经放大后通过超声波换能器输出;反射后得超声波经超声波换能器作为系统得输入,锁相环对此信号锁左,产生锁左信号启动单片机中断程序,得岀时间t,再由系统软件对其进行计算、判别后,相应得汁算结果被送至LED显示电路进行显示、,8 分频,TCNT 为(单位:ms): (一)超声波模块原理:超声波模块釆用现成得HC-SRO 4超声波模块,该模块可提供2cm-4 0 0 cm得非接触式距藹感测功能,测距精度可达髙到3mm、模块包括超声波发射器、接收器与控制电路。
基本工作原理:采用10 口TRIG触发测距,给至少10us得髙电平信号;模块自动发送8个40khz得方波,自动检测就是否有信号返回;有信号返回,通过10 口ECHO输出一个髙电平,髙电平持续得时间就就是超声波从发射到返回得时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
青岛科技大学
开放实验报告
院校:高职学院
专业:电气工程及其自动化
年级:13级1班
实验名称:基于Atmega16单片机超声波测距实验
姓名:***
学号:1318020135
同组者姓名:张东东
同组者学号:1318020138
指导教师:王泽华老师
基于ATmega16单片机超声波测距的及显示系统
摘要:超声波测距在当今社会生活中已有十分广泛的应用如倒车雷达、航海、宇航、石油化工等工业领域,此外在材料科学、医学、生物科学等领域也占据重要地位。
本文主要研究和说明了一种基于单片机微型处理器的超声波测距仪。
该仪器以超声波在空气中的传播速度为确定条件,以反射超声波来测量待定距离。
本文主要介绍了仪器的理论基础,和软硬件设计的相关情况。
该仪器硬件部分主要有单片机系统及显示电路、超声波传感器(发射部分、接收部分)、电源电路等四大部分组成。
软件部分主要由主程序、超声波发射子程序、超声波接收及中断子程序、显示程序等组成。
利用ATmega16单片机对超声波传感器接收到的信号进行一定的处理,并送到LCD1602上显示。
关键字:超声波,测距,单片机,显示
Based on ATmega16 single chip ultrasonic distance
measurement and display system
Abstract:ultrasonic ranging has been very widely used in today's social life, such as reversing radar, navigation, aerospace, petrochemical and other industrial areas, in addition in the field of materials science, medicine, biological sciences also occupy the important position.This paper mainly studies and illustrates a kind of ultrasonic range finder based on single chip microprocessor.The instrument to the ultrasonic velocity in air, in order to determine the conditions to reflect ultrasonic distance measure to be determined.This paper mainly introduces the theoretical foundation of the instrument, and hardware and software design.
The instrument hardware part mainly include the single chip microcomputer system and display circuit, ultrasonic sensors (launch part, receiving part) four major part, power supply circuit, etc.The software part is mainly composed of main program subroutine, ultrasonic launch, ultrasonic receiving and interrupt subroutine, display program, ing ATmega16 single chip microcomputer of ultrasonic sensor receives the signal processing, and send to the LCD1602 display.
Key words:ultrasonic ranging, microcontroller, display
目录
一、概论 (5)
1.超声波的产生。
2.超声声速的计算。
二、设计要求 (5)
三、ATmega16单片机的输入捕捉功能 (6)
四、硬件设计 (7)
1.ATmega16单片机的引脚分布图
2.超声波传感器
3.LCD1602显示屏
4.系统电路图
五、软件设计 (11)
六、附录 (12)
1.实物图
2.参考程序
3.参考文献
一、概论
1.超声波的产生
声波是物体机械振动状态(或能量)的传播形式。
所谓振动是指物质的质点在其平衡位置附近进行的往返运动形式。
超声波是指振动频率大于20KHZ的声波。
超声波的方向性好,穿透能力强,易于获得较集中的声能。
本超声波测距仪采用的的是HC-SR04超声波传感器,在其TRIG引脚输入一个持续时间为10us的高电平,即可产生8段频率为40KHZ的超声波。
2.超声波在空气中的传播速度
超声波的传播速度受介质和温度的影响,超声波在空气中的传播速度为:
v=(331.4+0.607T)m/s
式中,v为超声波在空气中的传播速度;T为实际温度单位为℃。
本文中介绍的超声波测距仪能实现较为精确的距离测量,取超声波在空气中(常温下)的速度v=340m/s为标准。
如想实现更加精准的距离测量,应增加温度补偿。
二、设计要求
*测量距离为3cm——300cm
*测量精度为0.5cm
三、ATmega16单片机的输入捕捉功能
ATmega16单片机的T/C1的输入捕捉功能是AVR定时/计数器的一个非常有特点的功能。
T/C1的输入捕捉单元可应用于精确捕捉一个外部事件的发生,记录事件的发生印记。
捕捉外部事件的触发信号由引脚TCP1输入,或模拟比较器的ACD单元的输出信号也可作为外部事件的触发信号。
当一个输入捕捉事件发生时,例如外部引脚TCP1的逻辑电平发生变化或模拟比较器的输出电平变化(事件发生)时,T/C1的计数器TCNT1的计数值被写入输入捕捉寄存器OCR1中,并置位输入捕捉标记为ICF1,产生中断申请。
置位编制为ICNC1将使能对输入输入捕捉触发信号的噪声抑制功能。
噪声抑制电路是一个数字滤波器,它对输入触发信号进行4次采样,当4次采样值相同时,才确认触发信号。
输入触发方式选择由寄存器TCCR1B的ICES1决定,当ICES1设置为“0”时,输入信号下降沿触发输入捕捉动作;当ICES1设置为“1”,输入信号上升沿触发输入捕捉动作。
四、硬件设计
1.ATmega16单片机的引脚分布图
2.超声波传感器
引脚说明:
(1).VCC电源正极,提供5v电源;
(2).Trig触发信号控制输入端;
(3).Echo回响信号输出;
(4).GND接地;
基本工作原理:
(1). 给Trig触发端提供一个至少10us的高电平
(2).模块自动发出8个40KHZ的方波,自动检测是否有信号
返回。
(3).有信号返回,Echo回响端输出一个高电平,高电平持续时间就是超声波从发射到返回的时间。
3.LCD1602显示屏
引脚分布情况:
其中第3脚VL为液晶显示器对比度调整端,接正电源时对比度最弱,接地电源时对比度最高(对比度过高时会产生“鬼影”,使用时可以通过一个10K的电位器调整对比度)。
3.系统电路图。