挖掘机铲斗设计
液压挖掘机铲斗机构的优化设计

即 l13 = 288mm、l21 = 281mm、l24 = 201mm、l29 = 313mm、l15 = 926mm、ψ = 2183 ×180 /π = 162°。
3 结 论
由计算结果可以看出 ,液压挖掘机铲斗机构经过优化以后 ,可在满足各约束条件下 ,取得一个最优值 ,以 使挖掘力最大 ,挖掘轻松顺利 ,提高工作效率 。优化设计的方法比常规设计更能得出符合实际的结果 ,而且 , 采用计算机辅助设计与手工计算相比 ,设计效率大大提高 。
n +1
F (X)
∑ [M =k =1
(φk
)
- MZ
(φk )
]2
→M IN
n +1
式中 , ( n + 1)是在机构自变量 φ的变化范围内均匀取出的状态 。
其中负荷函数 M Z : 以 φ为自变量 ,分四段来书写负荷函数为 :
第一段 :φ =φ0 ~φ0 +Φm - Δφ
M Z (φ) = l3
中小型挖掘机通常以铲斗液压缸挖掘作为主要挖掘方式 ,希望在实际挖掘中 ,挖掘力足够 ,挖掘时能轻 松顺利 。但铲斗机构的设计和工作又都受到一些约束的限制 ,选择一个最佳的设计方案 ,显然会大大提高挖 掘质量和工作效率 ,本文采用复合函数法对铲斗机构进行优化设计 。
1 优化模型
液压挖掘机正铲工作装置装设计.
太原科技大学本科毕业设计说明书EXS 3500液压挖掘机正铲工作装置装设计The Working Device Design of EXS 3500 Crawler Face-shovel Bucket Hydraulic Excavator学院 (系 :机械工程学院专业:机械制造及自动化(工机学生姓名:学号:指导教师:史青录评阅教师:完成日期:2015.06.15太原科技大学Taiyuan University of Science and Technology太原科技大学毕业设计(论文任务书(由指导教师填写发给学生学院(直属系 :机械工程时间: 15年 3月 9 日摘要挖掘机械是工程作业机械的一种重要类型,是开挖土石方的主要机械设备,正铲单斗液压挖掘机是一种以铲斗进行挖掘作业并采用液压传动的机械设备。
工作装置是液压挖掘机的执行机构,从总体来看常见的正铲工作装置属于平面连杆机构,铲斗、动臂和斗杆之间采用铰接的方式,在液压缸推力的作用下各部件围绕铰接点摆动,完成卸土、挖掘和提升等动作,常用的液压挖掘机的工作装置有正铲,反铲,装载, 抓斗和起重装置。
本次设计主要内容是 EXS 3500正铲液压挖掘机工作装置的设计,主要对挖掘机工作装置机构的几何参数进行计算设计,采用合适的调整方法使其达到设计要求;对动臂、斗杆进行强度校核和载荷分析,使其满足使用要求。
在本次设计中应该注意工作装置设计的原则,在满足各部件要求的条件下实现6.06米最大挖掘深度, 15.81米最大挖掘半径, 12.42米最大卸载高度, 17.17米最大挖掘高度, 以实现挖掘的功能。
关键词:设计;挖掘机;强度校核;正铲工作装置the Working Device Design of EXS 3500 Crawler Face-shovel Hydraulic ExcavatorAbstractShovel machinery is a major type of construction Machinery, which is major earth excavation equipment. Single Bucket Hydraulic shovel is a mechanical which reliance on hydraulic transmission with the bucket to carry out excavation work. Hydraulic shovel working device are commonly backhoe, hoe, loading, grab and lifting gear.The design principal is to design an EXS 3500 crawler face-shovel hydraulic excavator working device. And major working device geometry parameters are designed; checked hydraulic cylinder locking power .Use the appropriate method of adjustment to meet the requirement. Check boom and rod strength to meet the requirements.Design principles work should be noted in the design of device. all components must be meet the conditions, machine for maximum digging depth of 6.06 meters, radius of the largest mining of 15.81 meters, uninstall the greatest height of 12.42 meters, maximum cutting height of 17.17 meters, to achieve the functions of excavation.Keyword :Design;Excavator; Strength Check; face-shovel working device目录摘要 . (II)Abstract .................................................................................................................................I II 第 1章引言 ........................................................................................................................ 1 1.1挖掘机和工作装置概述 . .................................................................................... 1 1.2国内外研究现状 . ................................................................................................ 1 1.3液压挖掘机的发展前景 . .................................................................................... 2第 2章原始数据及设计要求 ............................................................................................ 4 2.1原始参数 . ............................................................................................................ 4 2.2工作装置设计原则 . ............................................................................................ 5第 3章工作装置总体方案选择 ........................................................................................ 6 3.1工作装置构成 . .................................................................................................... 6 3.2动臂及斗杆的结构形式的初选 . ........................................................................ 7 3.3动臂与动臂油缸的布置 . .................................................................................... 7 3.4铲斗与铲斗油缸的连接方式 . ............................................................................ 8第 4章工作装置机构参数的选择 .................................................................................... 9 4.1最大挖掘深度1h 校核 (10)4.2最大挖掘高度2h 校核: (11)4.3最大卸载高度3h 校核 (13)4.4最大挖掘半径1r 校核 (14)4.5斗杆最大挖掘力aF 校核 (15)4.6铲斗最大挖掘力bF 校核 .................................................................................. 17第 5章工作装置运动分析及包络图的绘制 .................................................................. 19 5.1动臂运动分析 . .................................................................................................. 19 5.2斗杆运动分析 . .................................................................................................. 20 5.3包络图的绘制 . .................................................................................................. 21第 6章工作装置主要部件的结构校核 .......................................................................... 23 6.1斗杆 . .................................................................................................................. 23 6.1.1工况一 ........................................................................................................ 23 6.1.2工况二 ........................................................................................................ 26 6.2动臂 . .................................................................................................................. 28 6.2.1工况一 ........................................................................................................ 29 6.2.2工况二 ........................................................................................................ 31 6.3销轴校核 . .......................................................................................................... 33总结 . ......................................................................................................................................34EXS 3500液压挖掘机正铲工作装置装设计参考文献 (35附录A 文献翻译原文 (36附录B 文献翻译中文 (44致谢 (49第1章引言1.1挖掘机和工作装置概述挖掘机在农田水利以及快速抢修等物料挖掘、搬移方面以及机场、港口、矿山、油田、城乡建设中得到了充分的利用,发挥了其他机械不可替代的关键作用。
WK-10B型挖掘机电铲
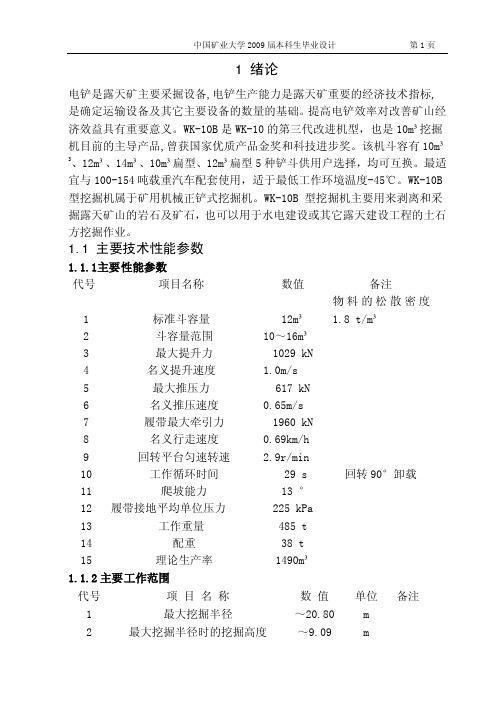
1 绪论电铲是露天矿主要采掘设备,电铲生产能力是露天矿重要的经济技术指标,是确定运输设备及其它主要设备的数量的基础。
提高电铲效率对改善矿山经济效益具有重要意义。
WK-10B是WK-10的第三代改进机型,也是10m³挖掘机目前的主导产品,曾获国家优质产品金奖和科技进步奖。
该机斗容有10m³3、12m³、14m³、10m³扁型、12m³扁型5种铲斗供用户选择,均可互换。
最适宜与100-154吨载重汽车配套使用,适于最低工作环境温度-45℃。
WK-10B 型挖掘机属于矿用机械正铲式挖掘机。
WK-10B 型挖掘机主要用来剥离和采掘露天矿山的岩石及矿石,也可以用于水电建设或其它露天建设工程的土石方挖掘作业。
1.1 主要技术性能参数1.1.1主要性能参数代号项目名称数值备注1 标准斗容量12m³物料的松散密度1.8 t/m³2 斗容量范围10~16m³3 最大提升力1029 kN4 名义提升速度 1.0m/s5 最大推压力617 kN6 名义推压速度0.65m/s7 履带最大牵引力1960 kN8 名义行走速度0.69km/h9 回转平台匀速转速 2.9r/min10 工作循环时间 29 s 回转90°卸载11 爬坡能力 13 °12 履带接地平均单位压力225 kPa13 工作重量485 t14 配重38 t15 理论生产率1490m³1.1.2主要工作范围代号项目名称数值单位备注1 最大挖掘半径~20.80 m2 最大挖掘半径时的挖掘高度~9.09 m3 最大挖掘高度~15.77 m4 最大挖掘高度时挖掘半径~18.91 m5 最大卸载半径~18.12 m6 最大卸载半径时的卸载高度~7.37 m7 最大卸载高度~10.23 m8 最大卸载高度时的卸载半径~17.58 m9 停机平面上的最大挖掘半径~14.55 m10 最大挖掘深度~2.17 m 1.1.3主要结构尺寸代号项目名称数值单位备注1 起重臂的仰角45 °2 起重臂的长度15.5 m3 斗杆的有效长度9.525 m4 起重臂支脚距回转中心的距离 3.08 m5 起重臂支脚距停机平面的距离 3.43 m6 顶部滑轮外缘距回转中心的距离13.5 m7 顶部滑轮上缘距停机平面的高度13.8 m8 平台尾部回转半径7.35 m9 配重箱底面距停机平面的高度 2.16 m10 底架梁底面至停机平面的高度0.51 m11 履带装置的最大长度~8.4 m12 履带装置的宽度7.1 m13 标准履带板的宽度 1.4 m14 司机水平视线距停机平面的高度~7.1 m1.2 作业环境条件(1)工作场地的环境温度为-40~45 ℃。
小型挖掘机工作装置设计

03 关键部件设计
斗杆
斗杆的设计需要考虑其强度、 刚度和耐磨性
斗杆是挖掘机的重要组成部 分,用于挖掘和装载物料
斗杆的材质通常为高强度钢 或合金钢
斗杆的形状和尺寸需要根据 挖掘机的工作条件和作业要
求进行优化设计
动臂
设计要点:强度、刚度、稳 定性、耐磨性
结构:由液压缸、连杆、轴 承等部件组成
作用:支撑挖掘机工作装置, 进行挖掘、装载等操作
价格策略:通过 制定合理的价格 策略,提高产品 的市场竞争力
竞争优势分析
成本优势:小型挖掘机设计成本相对较低,有利于降低产品价格,提高市场竞争力
技术优势:小型挖掘机设计技术先进,性能稳定,提高了工作效率和可靠性 市场需求:小型挖掘机市场需求量大,设计满足市场需求,提高市场竞争力 售后服务:提供完善的售后服务,提高客户满意度,增强市场竞争力
优化方法:根据测试结果,对 挖掘机的设计进行优化,提高 性能和可靠性。
测试结果分析
测试项目:挖掘 力、挖掘深度、 挖掘宽度等
测试方法:模拟 实际工况,进行 现场测试
测试结果:各项 性能指标均达到 设计要求
优化建议:针对测 试中发现的问题, 提出优化方案,提 高工作效率和可靠 性。
优化方案
提高工作效率: 通过优化设计提 高挖掘机的工作 效率,如改进液 压系统、优化传 动系统等。
降低能耗:通过 优化设计降低挖 掘机的能耗,如 改进发动机、优 化液压系统等。
提高安全性:通 过优化设计提高 挖掘机的安全性, 如改进安全防护 装置、优化控制 系统等。
提高舒适性:通 过优化设计提高 挖掘机的舒适性, 如改进驾驶室、 优化座椅等。
优化效果评估
工作效率:提高挖掘机的工作效率, 减少工作时间
XG804反铲液压挖掘机三维建模
太原科技大学本科毕业设计XG804履带式液压挖掘机三维建模XG804 tracked excavator 3D modeling学院(系):机械工程专业:机械设计制造及其自动化(工机)学生姓名:武慧杰学号:201012030418指导教师:李捷评阅教师:完成日期:太原科技大学Taiyuan University of Science and Technology太原科技大学毕业设计(论文)任务书学院(直属系):机械工程学院时间: 14年 6月 10日摘要挖掘机械是工程机械的一种类型,是土石方开挖的主要机械设备,单斗液压挖掘机是一种采用液压传动并以铲斗进行挖掘作业的机械,液压挖掘机的工作装置常用的有反铲,正铲,装载,抓斗和起重装置。
本次设计主要是设计XG804履带式液压挖掘机整机的三维建模。
主要对工作装置机构的几何参数进行设计,通过对实物机型进行测绘,然后基于Pro-e、AutoCAD等工程绘图软件对挖掘机各零部件进行绘图、三维建模、整机装配等,对挖掘机进行运动分析,挖掘机各种工作状态以三维图的方式进行教学演示等。
在设计中应注意工作装置设计原则,在各部件满足实物要求的条件下实现各零部件无干涉有效装配,完成各工况下运动拟合演示等功能。
关键字:挖掘机,三维建模,Pro-e,运动分析,教学演示XG804 tracked excavator 3D modelingAbstractShovel machinery is a major type of construction Machinery, which is major earth excavation equipment. Single Bucket Hydraulic shovel is a mechanical which reliance on hydraulic transmission with the bucket to carry out excavation work. Hydraulic shovel working device are commonly backhoe, hoe, loading, grab and lifting gear.This design is mainly 3D modeling design of XG804 hydraulic crawler excavator. Geometric parameters on the working mechanism of the main design, through the mapping of physical models, and then the Pro-e, AutoCAD and other engineering drawing software based on excavator parts for drawing, three-dimensional modeling, assembly, motion analysis was carried out on the excavator, excavator to various working states of three-dimensional map of the ways of teaching demo.In the design should pay attention to the working device design principle, meet the real requirements under the conditions of the parts without interference in effective assembly components, completed under the condition of motion fitting demonstration function.Keyword:Excavator;3D modeling;Pro-e;Motion analysis;Teaching demonstration目录任务书 (I)摘要.............................................. 错误!未定义书签。
挖掘机铲斗设计范文
挖掘机铲斗设计范文挖掘机铲斗设计是指针对挖掘机的工作需求,对铲斗的结构、材料、尺寸以及功能等进行设计和优化,以提高挖掘机的工作效率和使用寿命。
本文将围绕着挖掘机铲斗设计展开,从铲斗的结构、材料、尺寸以及功能几个方面进行详细介绍。
一、铲斗结构设计挖掘机铲斗的结构通常包括铲齿、刀片、侧杆、支撑板等部分。
铲斗的结构设计应具有强度高、稳定性好、使用寿命长的特点。
为了增加铲斗的强度,可以采用加厚材料或者优化结构设计。
同时,在材料选择上可以考虑使用高强度合金钢或耐磨钢,以提高铲斗的耐磨性能。
二、铲斗材料选择挖掘机铲斗的材料选择直接影响着铲斗的使用寿命和工作效率。
通常情况下,挖掘机铲斗材料应具有足够的强度和硬度,同时耐腐蚀、耐磨和耐高温等特点。
目前常见的挖掘机铲斗材料有高锰合金钢、耐磨钢、高强度钢等。
在材料选择上,可以根据挖掘机的工作环境和工作强度来选择合适的材料。
三、铲斗尺寸设计挖掘机铲斗的尺寸设计直接决定着挖掘机的工作效率。
过大或过小的铲斗都会导致工作效率低下。
尺寸设计应综合考虑挖掘机的型号、工作需求、土壤条件等因素来确定。
一般来说,铲斗的宽度适合挖掘机轨迹的宽度,铲斗的深度和高度需要适应挖掘机的工作需求。
如需要挖掘深的物料,可以选择较高的铲斗;如果工作场地狭窄,可以选择较窄的铲斗。
四、铲斗功能设计挖掘机铲斗的功能设计也是铲斗设计的重要部分。
铲斗的功能设计主要包括倾斜功能、旋转功能等。
倾斜功能可以通过安装液压缸实现,能够实现铲斗在一个平面上倾斜,以适应不同工况下的挖掘需求。
旋转功能可以通过安装旋转机构实现,能够实现铲斗的360°旋转,提高工作效率和灵活性。
总之,挖掘机铲斗设计是一项非常重要的工作,它直接影响着挖掘机的工作效率和使用寿命。
在设计过程中,应综合考虑铲斗的结构、材料、尺寸以及功能等因素,以满足挖掘机在不同工况下的工作需求。
同时,铲斗的结构应具有强度高、稳定性好的特点,材料选择应具有足够的强度、硬度和耐磨性能。
正铲挖掘机工作装置机械课程设计

—斗杆挖掘力 到B点的距离
—齿尖纵向阻力 到B点的距离
—齿尖纵向阻力 到A点的距离
—动臂挖掘力 到A点的距离
所以动臂挖掘力 取 。
动臂油缸与动臂最大夹角 ,斗杆油缸与动臂最大夹角
取H=0.45 B=0.3 h=0.43 b=0.28
由上面斗杆的计算可知拉压应力和剪切应力较小,主要计算弯曲应力,在这不再计算。
6
轴承选用滑动轴承,材料选择铅青铜 ,轴承宽径比选1。在F处用一个轴承受力最大为227KN
根据公式 得:
由ห้องสมุดไป่ตู้径比选1,则 ,向大取整得
则尺寸强度满足。
轴的直径选取为 材料为40Cr, 。
第三章
1
用solidworks进行三维建模,建了个零件的三维模型和总体装配图。还用solidworks进行重要零件的有限元分析。
最大挖掘深度:
2440mm
最大挖掘半径:
8260mm
动臂长度:
3950mm
动臂转动角度:
斗杆长度:
2600mm
斗杆转动角度:
铲斗长度:
1760mm
铲斗转动角度:
斗杆挖掘力(ISO):
243kN
铲斗挖掘力(ISO):
230kN
主油路系统工作压力:
27.4Mpa
最大牵引力:
294KN
2
正铲挖掘机的工作装置如下图所示,主要由1-动臂、2-斗杆、3-铲斗、4-动臂油缸、5-斗杆油缸和6-铲斗油缸组成,其他组成有连接处的轴承和轴等。
最大拉应力为:
最大剪切应力为:
斗杆材料的选择:
选取Q235碳素结构钢,查机械工程材料表7-2可知:
所以强度满足。
当工作装置处于最大挖掘半径时,铲斗齿尖D无横向阻力,如下图所示。
工况条件下土石方机械铲斗斗齿的优化设计
的 )也是必要的 ;对于斗齿结构形式的理论研究 )
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!! "# $ 轴啮合频率 % # ’ # ( % % & & &及 其 所 在 的 边 带 能 结论 而更高次的 量都很大 ) 特别是 ’ % & 谐波增长异常 ) 谐波受到的调制程度却很小 * 依据上面的频谱分析 ) 对几个能量比较集 + ’ , 中的边带分别进行窄带滤波 ) 得到一组滤波信号 ) 再分别经 -. 变换和三次 4 "# / 0 1 2 3 4 5 分析知道 ) 轴啮合频率各谐波均受到不同程度幅值和频率 $ 调 制) 调幅频率是 6 调频频率是 7 8 9 # : : 7 ’ 9 ) -& -& 频率调制程度 其中 ’ 6 7 8 9 ) # ( -& % % & & 受到的幅值 # 均很大 * 本 次 分 析 还 比 较 了 -. 变换及三次 + ( , / 0 1 2 3 认为二者都 4 4 5 综合法与倒频谱分析法的优缺点) 适用于载波边带的分析) 只是前者在分析上更细致 一些) 而后者对一些频率接近的故Байду номын сангаас信号容易混淆; 经上面的分析我们可以对故障进行总结 < 通过 的分析可判断故障出现在 "# + : , $ 轴的 ( # =号齿 轮上 ) 然后通过对 + 进行分析可初步判断故障可 ’ , 能是发生了胶合或点蚀 ) 在结合分析 + 发现调制 : , 只在前 (阶谐波比较严重 ) 而更高次谐波受到的调 制程度很小 ) 针对这种调制边带和各谐波的能量分 布) 可判断 (或 =号齿轮发生的是点蚀故障而非胶 合;
挖掘机铲斗设计汇总

挖掘机铲斗设计汇总挖掘机铲斗是挖掘机的重要工作装置,用于开挖、装载和搬运土石等杂物。
因此,挖掘机铲斗的设计至关重要,直接影响到挖掘机的工作效率和稳定性。
在这篇文章中,我们将对挖掘机铲斗的设计进行详细的汇总,并探讨不同设计方案的适用场景和优缺点。
1.材料选择2.形状设计挖掘机铲斗的形状设计应符合工作需求,能够快速有效地开挖和装载。
常见的形状设计包括平底斗、弯斗、洞斗和铲斗等。
平底斗适用于开挖平整地面,而弯斗适用于坚硬土壤和石料的挖掘。
洞斗适用于深度挖掘和矿山开采,而铲斗则适用于搬运杂物和垃圾。
3.容量选择挖掘机铲斗的容量选择应根据具体工作需求和挖掘机的额定载荷来确定。
容量太小会导致频繁装载和卸载,影响工作效率,而容量太大则会增加挖掘机的工作负荷,降低稳定性。
因此,在设计挖掘机铲斗时,需要合理选择容量,以实现最佳工作效果。
4.加强结构由于挖掘机铲斗在工作过程中需要承受较大的载荷和冲击力,因此加强其结构可以提高其耐用性和稳定性。
常见的加强结构包括加固边缘、增加支撑和安装防护装置等。
这些加强结构可以有效地减少应力集中和疲劳破坏,延长挖掘机铲斗的使用寿命。
5.液压系统6.操作控制总结:挖掘机铲斗的设计是一个复杂的过程,需要综合考虑材料选择、形状设计、容量选择、加强结构、液压系统和操作控制等多个因素。
只有在合理设计的基础上,挖掘机铲斗才能达到最佳的工作效果和稳定性。
因此,设计人员应根据具体工作需求和挖掘机的性能参数,制定科学合理的设计方案,以促进挖掘机铲斗的发展和推广。
吨液压挖掘机斗杆铲斗和油缸设计设计

吨液压挖掘机斗杆铲斗和油缸设计设计7吨液压挖掘机斗杆、铲斗总成及油缸的设计摘要液压挖掘机应用面广,使用量大,在工程机械市场占有很重要的地位,目前已成为工程机械第一主力机种。
液压挖掘机模仿人体构造,有大臂、小臂和手腕,能“扭腰”旋转和行走,具有较长的臂和杆,可做空间六自由度动作,配装上各种工作装置能进行立体作业。
这种带有类似人类“基因”的挖掘机已成为人类工程建设中的主要伙伴之一,也被称为土建机械手,是建设机器人的代表。
正因为液压挖掘机通用性强,作业范围广,所以被认为是多功能的工程机械。
我的毕业设计课题是7吨液压挖掘机斗杆总成及斗杆油缸设计。
该设计主要是通过对广西玉柴生产的YC-60液压挖掘机进行现场测绘,取得了工作装置的大体结构数据。
对YC-60和YC-70液压挖掘机的主要参数进行比较,再结合《液压挖掘机》和《液压与气动传动》,对单斗液压挖掘机的工作装置进行运动学分析和结构参数的计算。
根据运动学分析和结构参数的计算结果得到斗杆的基本尺寸和结构尺寸,同时完成斗杆油缸的计算设计。
最后用CAD 软件进行二维图的绘制。
关键词:液压挖掘机;斗杆;铲斗;铲斗油缸;设计7 Tons of Hydraulic Excavator Arm Bucket Assemblyand Cylinder DesignAbstractHydraulic excavator, a wide range of applications, the use of a large quantity, occupies a very important position in the market engineering machinery, has now become the first main machines of mechanical engineering. Hydraulic excavator mime the human body structure, a big arm, small arm and wrist, to" twist" rotation and walking, with long arms and bar, does six degree of freedom motion space, equipped with a variety of working device for stereo operation. This is similar to the human" gene" of the excavator has become a human engineering construction in the main partners, also known as civil mechanical hand, is representative of construction robot. Because of thehydraulic excavator versatility, wide scope of operation, so it is considered a function of Engineering machinery.My graduation project is seven-ton hydraulic excavator arm and bucket cylinder assembly and design. The design is mainly produced by Guangxi Yuchai YC-60 hydraulic excavators site mapping, made the general working device data. Combining with ‘hydraulic excavator’and ‘hydraulic and pneumatic drive’,respectively, using the mechanical knowledge of hydraulic excavator working device kinematics analysis and mechanical calculations. Kinematic analysis and mechanical calculations based on the results obtained Stick size of the basic size and structure, while the calculation of the completion Stick cylinder design. Finally, two-dimensional CAD software for mapping.KEY WORDS: Hydraulic excavator;Stick;bucket; bucket cylinder; design目录摘要.................................................................................. 错误!未定义书签。
挖掘机反铲设计说明书例
目录摘要 (II)第1章工作装置设计原则.................................................................................................... - 1 - 第2章反铲工作装置总体方案的选择................................................................................ - 2 -2.1总体方案的选择.......................................................................................................... - 2 -2.2 反铲工作装置自身几何参数..................................................................................... - 2 - 第3章斗形参数的选择........................................................................................................ - 6 - 第4章动臂机构参数选择.................................................................................................... - 7 -5.1设计的主要要求.......................................................................................................... - 7 -5.2动臂机构设计的内容及步骤...................................................................................... - 7 - 第5章斗杆机构的参数选择...............................................................................................- 11 -5.1设计的主要要求.........................................................................................................- 11 -5.2总体方案的选择.........................................................................................................- 11 - 第6章铲斗机构的参数选择.............................................................................................. - 13 -7.1设计的主要要求........................................................................................................ - 13 -7.2铲斗机构设计的内容及步骤.................................................................................... - 13 - 第7章动臂液压缸作用力及闭锁力的确定...................................................................... - 16 -7.1动臂液压缸的作用力................................................................................................ - 16 -7.2动臂液压缸的闭锁力................................................................................................ - 20 - 第8章工作装置运动分析及包络图的绘制...................................................................... - 27 -8.1 动臂运动分析........................................................................................................... - 27 -8.2 斗杆运动分析........................................................................................................... - 28 -8.3 铲斗运动分析........................................................................................................... - 29 -8.4 斗齿间运动分析....................................................................................................... - 31 -8.5 包络图的绘制........................................................................................................... - 32 - 参考文献.................................................................................................................................. - 34 - 总结.......................................................................................................................................... - 35 - 附录.......................................................................................................................................... - 36 -摘要挖掘机械是工程机械的一种类型,是土石方开挖的主要机械设备,单斗液压挖掘机是一种采用液压传动并以铲斗进行挖掘作业的机械,液压挖掘机的工作装置常用的有反铲,正铲,装载,抓斗和起重装置。
变截面挖掘机铲斗的设计与研究
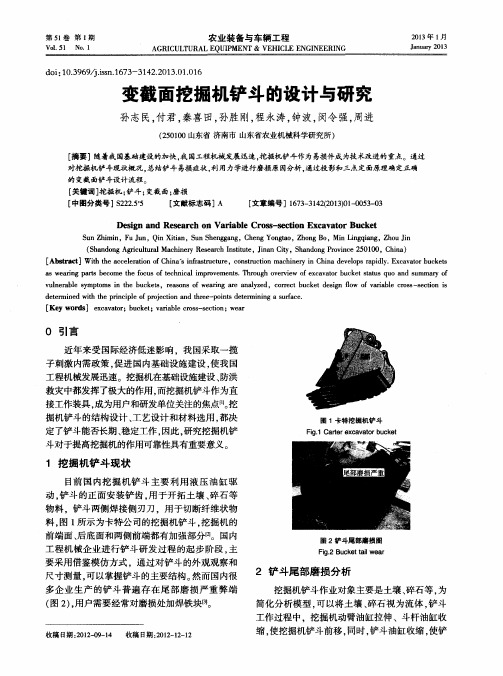
F i g. 1 Car t er e x c a va t or b u ck et
1 挖 掘机铲斗现状
目前 国 内 挖 掘 机 铲 斗 主 要 利 用 液 压 油 缸 驱 动。 铲 斗 的正 面 安装 铲 齿 , 用 于开 拓 土 壤 、 碎 石 等
物料 ,铲斗两侧焊接侧刃刀 ,用于切断纤维状物 料。 图1 所示为卡特公司的挖掘机铲斗 . 挖掘机的 前端面 、 后底面和两侧前端都有加强部分闭 。国内 工程机械企业进行铲斗研发过程 的起步 阶段 , 主 要采用借鉴模仿方式 。通过对铲斗的外观观察和 尺寸测量 , 可 以掌握铲斗的主要结构。 然而国内很
的 变截 面 铲 斗设 计 流程 。
[ 关键词 ] 挖掘机 ; 铲斗 ; 变截 面; 磨损 [ 中图分类号 ] ¥ 2 2 2 . 5 + 5 [ 文献标 志码 ] A
[ 文章编号 ] 1 6 7 3 — 3 1 4 2 ( 2 0 1 3 ) 0 1 — 0 0 5 3 — 0 3
[ Ke y w o r d s ]e x c a v a t o r ; b u c k e t ; v a i r a b l e C oS r S — s e c t i o n ; w e a r
O 引 言
近年来受国际经济低迷影响 ,我国采取一揽 子刺激 内需政策 , 促进 国内基础设施建设 , 使我 国 工程机械发展迅速。挖掘机在基础设施建设、 防洪 救灾 中都发挥了极大的作用 , 而挖掘机铲斗作为直 接工作装具, 成为用户和研发单位关注的焦点f 1 ] 。 挖 掘机铲斗的结构设计 、 工艺设计和材料选用 。 都决 定了铲斗能否长期、 稳定工作 , 因此 , 研究挖掘机铲 斗对于提高挖掘机的作用可靠性具有重要意义。
挖掘机设计方案
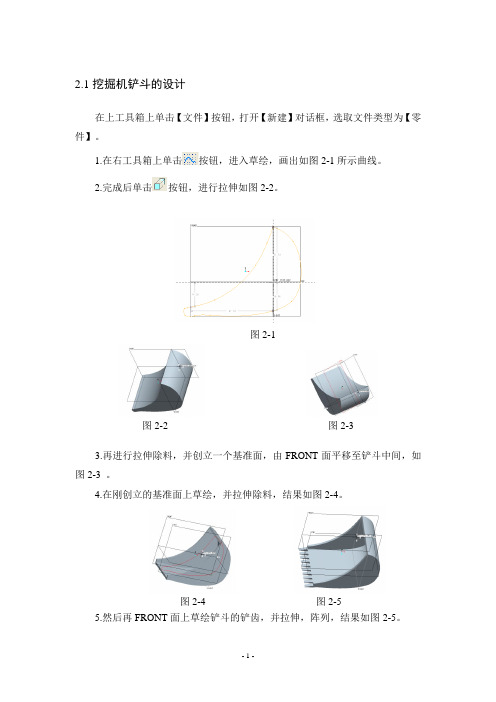
2.1挖掘机铲斗的设计在上工具箱上单击【文件】按钮,打开【新建】对话框,选取文件类型为【零件】。
1.在右工具箱上单击按钮,进入草绘,画出如图2-1所示曲线。
2.完成后单击按钮,进行拉伸如图2-2。
图2-1图2-2 图2-33.再进行拉伸除料,并创立一个基准面,由FRONT面平移至铲斗中间,如图2-3 。
4.在刚创立的基准面上草绘,并拉伸除料,结果如图2-4。
图2-4 图2-55.然后再FRONT面上草绘铲斗的铲齿,并拉伸,阵列,结果如图2-5。
6.接下来在DTM1基准面内进行铲斗连接部分的拉伸,结果如图2-6。
图2-6这样,铲斗就设计完成了!2.2挖掘机斗杆及动臂的设计2.2.1挖掘机斗杆设计1.在FRONT面上草绘如图2-7所示的斗杆曲线,并且拉伸,结果如图2-8。
图2-7图2-8 图2-92.接下来将斗杆连接处进行必要的拉伸除料,以满足装配需求,结果如图2-9。
这样斗杆就设计完成!2.2.2挖掘机动臂设计挖掘机动臂的设计跟斗杆差不多,只是外形和尺寸不一样,这里不再进行阐述,动臂设计结果如图2-10所示。
图2-102.3挖掘机机身及驾驶舱的设计1.先在TOP基准面内拉伸出驾驶舱及发动机舱的底板,如图2-11。
图2-11 图2-122.然后在该底板上草绘出发动机舱的曲线,并拉伸,倒角,如图2-12。
3.接下来是散热器突盖的拉伸,结果如图2-13。
图2-13 图2-144.单击按钮,以ERONT面创建DTM1基准面,并在该面内用【扫描】、【伸出项】指令把排气管扫描出来,结果如图2-14。
5.再由FRONT面平移创立DTM2基准面,并在其上拉伸出驾驶舱外形,如图2-15。
图2-15 图2-166.接下来将驾驶舱进行必要处理,包括窗户,座椅,操作杆等的拉伸,结果如图2-16。
7.在驾驶舱的右侧,拉伸后臂及液压杆支座,结果如图2-17。
图2-17 图2-188.再然后进行倒角,和将散热器盖上开出散热孔,如图2-18。
装载机设计说明书
第一章前言1.1设计课题我此次设计专题为装载机工作机构设计,要求该装载机装载能力大,机动性好安全可靠,生产率较高,其斗柄是曲线的,铲斗的提起和倾斜由油缸的动作来实现。
1.2装载机的发展历史装载工作是整个地下采矿的重要环节,其工作量最繁重,费时最多,对采矿生产率影响极大。
消耗于这一工序的劳动量占循环时间的30%-40%。
正因为如此,国外许多的国家十分重视装载机械的开发推广与使用。
装载机开始制造是在90多年前。
最早的装载机是在马拉的农用拖拉机前部装上铲斗而成.。
自身带有动力的装载机,是在1920年初出现的,其铲斗安装在两根垂直立柱上,铲斗的举升和下落是用钢绳来操纵的。
从1930年开始,装载机的机构得到较大的改进。
1939年出现了比较先进的轮胎式装载,在40年代装载机得到了更大的发展。
1944年,开始用液压代替钢绳控铲斗。
1947年装载机发展成四轮驱动。
1950年出现了第一台带有液力变矩器的轮胎式装载机,它使装载机能够很平稳地插入料堆并且使作增快,同时插入运动,发动机不会因插入阻力大而熄火。
1960年出现了第一台铰接式装载机,这使装载机转向性能大大改善,增加了它的机动性能性和纵向稳定性。
60年代的电动装载机。
这是装载机设计的一个新的突破,它进一步增加了装载机的使用范围。
今后装载机的发展趋势是通过工作机构尺寸的增加和机构的改进进一步增加了生成力。
1.3装载机工作机构的特点装载机工作机构由潺斗,铲臂,铲斗座,升降油缸(两个左右对称)侧卸油缸,拉斗油缸组成。
装载机在工作过程中,铲斗是沿料堆底部插入料堆的,斗尖在料堆内运动,轨迹如图1-1所示。
图1-1由于铲斗沿料堆底部插入料堆所以插入阻力大,阻力方向与机体的推进方向相反,从而使得装载机有足够的重量和牵引力来克服插力。
以得到足够的插入深度,铲斗插入料堆后,在开始提升的瞬间,料堆对提升的阻力很大,以后就迅速的降低,故在提斗的过程中工作机构承受的负载很不均匀,尖峰负荷大。
铲斗加工方案
铲斗加工方案简介铲斗是挖掘机等工程机械上的重要部件之一,它主要用于挖掘、装载和运输土壤、石料等材料。
铲斗的加工方案对其质量和性能有着重要影响。
本文将介绍铲斗加工的一般工艺流程,包括铲斗的设计、材料选择、加工工艺以及质量控制等方面内容。
铲斗设计铲斗的设计是铲斗加工的第一步,它直接影响铲斗的使用性能和寿命。
在设计铲斗时,需要考虑以下几个关键因素:1.边缘形状:铲斗的边缘形状会直接影响其挖掘和装载效果。
常见的边缘形状有尖头形、直边形和堆积型等。
根据具体使用要求和材料特性选择适宜的边缘形状。
2.容量和倾角:铲斗的容量和倾角需根据挖掘机的工作条件和作业要求进行设计。
容量过大可能导致装载不满,容量过小那么会影响作业效率。
倾角的选择要考虑到土壤类型、松软程度等因素。
3.材料选择:铲斗一般采用高强度耐磨钢材料制作,如Q345B等。
这种材料具有良好的强度和耐磨性能,能够满足铲斗在恶劣条件下的使用要求。
加工工艺铲斗加工的工艺流程主要包括以下几个步骤:1.材料切割:根据设计要求,将选用的耐磨钢材料进行切割。
切割方法主要有火焰切割、等离子切割等。
2.折弯和卷边:对切割好的板材进行折弯和卷边,形成铲斗的壁板和边缘。
3.焊接:将各个零部件进行焊接,形成整体铲斗的框架结构。
焊接工艺应符合相关标准,确保焊缝牢固。
4.热处理:对焊接好的铲斗进行热处理,提高其强度和耐磨性能。
常用的热处理方法有正火、淬火、回火等。
5.外表处理:热处理后的铲斗需要进行外表处理,防止锈蚀和减少与材料的摩擦。
通常使用喷涂或镀层等方法进行外表处理。
6.组装和调试:根据设计要求将各个零部件组装起来,并进行调试,确保铲斗的性能和质量。
质量控制在铲斗加工过程中,质量控制是非常重要的环节。
以下是一些常用的质量控制措施:1.原材料质量检验:对选用的耐磨钢材料进行化学成分分析、强度测试和硬度测试,确保材料符合要求。
2.加工工艺控制:在加工过程中,严格控制尺寸和形状的偏差,确保铲斗的精度和一致性。
工程机械挖掘机铲斗结构分析
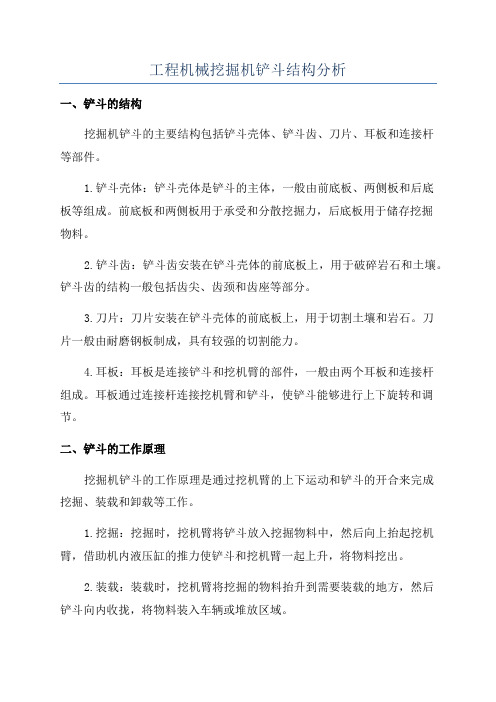
工程机械挖掘机铲斗结构分析一、铲斗的结构挖掘机铲斗的主要结构包括铲斗壳体、铲斗齿、刀片、耳板和连接杆等部件。
1.铲斗壳体:铲斗壳体是铲斗的主体,一般由前底板、两侧板和后底板等组成。
前底板和两侧板用于承受和分散挖掘力,后底板用于储存挖掘物料。
2.铲斗齿:铲斗齿安装在铲斗壳体的前底板上,用于破碎岩石和土壤。
铲斗齿的结构一般包括齿尖、齿颈和齿座等部分。
3.刀片:刀片安装在铲斗壳体的前底板上,用于切割土壤和岩石。
刀片一般由耐磨钢板制成,具有较强的切割能力。
4.耳板:耳板是连接铲斗和挖机臂的部件,一般由两个耳板和连接杆组成。
耳板通过连接杆连接挖机臂和铲斗,使铲斗能够进行上下旋转和调节。
二、铲斗的工作原理挖掘机铲斗的工作原理是通过挖机臂的上下运动和铲斗的开合来完成挖掘、装载和卸载等工作。
1.挖掘:挖掘时,挖机臂将铲斗放入挖掘物料中,然后向上抬起挖机臂,借助机内液压缸的推力使铲斗和挖机臂一起上升,将物料挖出。
2.装载:装载时,挖机臂将挖掘的物料抬升到需要装载的地方,然后铲斗向内收拢,将物料装入车辆或堆放区域。
3.卸载:卸载时,挖机臂将装载的物料抬升到需要卸载的地方,然后铲斗向外张开,将物料倾倒到指定位置。
三、铲斗的优化措施为了提高挖掘机铲斗的工作效率和使用寿命,需要采取一些优化措施。
1.选用优质材料:铲斗的主要受力部件应选用高强度、高韧性的材料,以提高结构的耐久性和抗磨性。
2.合理设计结构:铲斗的结构应根据不同的工作条件和物料特性进行合理设计,以提高挖掘、装载和卸载效率,并避免因设计不合理引起的裂纹和断裂等故障。
3.加强润滑和维护:定期对铲斗进行润滑和维护,保持铲斗的良好工作状态,减少故障和损坏的发生。
4.做好使用管理:合理使用和操作挖掘机铲斗,严格遵守使用规程和操作规范,以延长铲斗的使用寿命。
通过对挖掘机铲斗结构的分析和优化措施的提出,可以提高挖掘机的工作效率和使用寿命,为工程建设提供更高效、更可靠的设备支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一、基本要求............................................................. 错误!未定义书签。
1.1铲斗的结构选择 (1)二、铲斗基本参数的确定 (2)2.1铲斗长宽高的确定 (2)2.2挖掘力计算 (3)三、铲斗几何形状 (4)3.1铲斗的组成 (4)3.2斗体曲线 (4)3.3两种曲线的比较 (5)四、结论 (6)参考文献 (7)一、基本要求斗轮挖掘机的铲斗在轮圈回转一周的过程中, 要完成切割、装载和排空物料三项作业。
切割时要求斗齿能迅速切入物料。
为此铲斗必须具有足够的强度和刚度, 以便承受物料的反作用力。
装载时要求物料能较通畅地流人铲斗( 这样可减少切割阻力) , 同时在物料充填铲斗时, 既要填满铲斗空间, 又不能产生过大的挤压力, 否则由于挤压力的增大, 会使铲斗壁与物料的吸附力增大(在一定吸附系数下, 吸附力与两物体之间的正压力成正比) , 造成排料时物料排不净或撒料等情况。
1.1铲斗的结构选择铲斗结构形状和参数的合理选择对挖掘机的作业效果影响很大,其应满足以下要求:(1)有利于物料的自由流动。
铲斗内壁不宜设置横向凸缘、棱角等,斗底的纵向剖面形状要适合于各种物料的运动规律。
(2)要使物料易于卸尽(3)为使装进铲斗的物料不易于卸出,铲斗的宽度与物料的粒径之比应该大于4,大50时,颗粒尺寸不考虑,视物料为均质。
综上考虑,选用中型挖掘机常用的铲斗结构与下图。
斗齿的安装连接采用橡胶销式,结构示意图如下图二、铲斗基本参数的确定2.1铲斗长宽高的确定斗容量q ,平均宽度B ,转斗挖掘半径R 和转斗挖掘满转角2ϕ是铲斗的四个主要参数,R,B,2ϕ,三者之间有下几何关系:式中土壤松散系数s K 近似值取1.25,q=0.28m3,根据上式可由R,B,2ϕ中作任值求相应第三值。
其斗容量0.28m3,斗宽B=0.794m 。
根据已经确定的斗轮挖掘机生产力轮圈直径宽度转速铲斗数量及每只铲斗的容量, 即可确定铲斗的宽度( B )长度( L )和高度( H )L : B ≈ 1.3;所以可知L=1.0322m q = 0 .8 B L H204.1B qH =,式中q ——铲斗容量( 立方米 )把数据代入后,可求得H=0.339m求出L , H , B 后, 必须按轮圈的圆周速度及铲斗个数来校核铲斗处于轮圈正上方时,物料是否能靠自重保证落入卸料区间。
设每只铲斗及其卸料空间所占的圆心角为a , 每只铲斗的卸料空间弦长为L BC =空( 见图1 ) n a π2=。
式中 n ——铲斗数L ——铲斗长度(L=AB )R ——轮圈半径12a a a -= , 2sin 22a R L =然后根据物料抛物线轨迹, 求出抛物距离)(x S 式中 H ——铲斗高度g ——重力加速度t ——物料落到轮圈所需时间v ——铲斗齿线速度若L 空> )(x S , 则所确定的L 、B 、H 三参数满足设计要求, 若L 空< S <、) , 则表明斗内部分物料要外撒, 必须修正H 与L , 重新校核, 直至L 空> )(x S 。
2.2挖掘力计算挖掘机的工作对象是土壤,设计和使用挖掘机时,都需要了解土壤的基本特性和切削土壤过程的一些基本知识。
铲刀或铲斗的切削部分,以机械的方法将土块或土层从土壤中剥离出来的过程,成为土壤切削。
土壤切削是一个很复杂的过程。
在楔形切削刃把土层从土壤中剥离的过程中,土壤受到挤压和剪切,是被切离的土壤发生松散以及一部分受到压缩。
因而产生了土壤原始结构的破坏阻力;土壤与土壤之间的摩擦力和土壤与切削刀具之间的摩擦力。
切削过程中,土壤作用在切削刃上的力称为切削阻力。
为了研究方便,我们吧铲斗和切削刃与土壤之间的摩擦力也当做切削阻力的一部分。
切削力与切削装置作用在土壤上。
其大小和土壤切削阻力大小相同,方向相反。
土壤呗剥离后,将向铲斗内流动。
流动过程中,土壤与土壤和土壤与切削装置之间产生摩擦。
同时,土壤的流动收到铲斗后壁的阻碍还会产生附加阻力。
因此,机械的切削装置除了客服上述切削阻力外,还有克服这些摩擦力和附加阻力。
铲斗工作时,这些附加力形成装土阻力外。
切削阻力和装土阻力之和称为挖掘阻力。
不同的铲斗,装土阻力占挖掘阻力之比相差很大。
转斗挖掘时,土壤切削阻力随挖掘深度改变而有明显的变化,根据资料提供的公式:式中C ——表示土壤硬度的系数,IV 级土取C=16~35,在此选31;R ——铲斗与斗杆铰杆点至斗齿尖距离,即转斗切削半径,mm L R 100033== max ϕ——转都在挖掘过程中总转交的一半ϕ——铲斗瞬时转角B ——切削刃宽度影响系数,B=1+2.6B ,其中b 为铲斗平均宽度,单位为厘米A k ——切削角变化影响系数,A=1.3Z ——带有斗齿的系数Z=0.75X ——斗侧壁厚度影响系数初步设计时,X=1.15D ——切削刃挤压土壤分力,据斗容量大小在D=10000~20000N 范围内选取,选17000求得N F 135558max三、铲斗几何形状3.1铲斗的组成铲斗由斗唇、斗体、斗框及耳子四部分组成( 见图2 )( 1 ) 斗唇斗唇位于铲斗的前部, 斗齿装在斗唇上。
为了降低挖掘作业时的动载荷,一般采用 拱形斜切斗唇。
为了减少对土岩的粘着性, 斗唇宽度在强度允许的条件下必须尽量窄些, 内表面平滑些。
斗齿与斗唇的连接必须牢固可靠, 拆卸方便。
( 2 ) 耳环用螺栓与轮圈固定( 图3 )。
第一轮设计时, 仅将耳环贴在轮圈侧壁上。
工作中发现:由于切割时冲击力的作用, 使斗唇产生弹性变形, 以致耳环窜动, 挤压螺母, 造成拉毛螺检螺纹, 耳环孔眼变成椭圆等问题。
为了克服这种现象,我们将耳子与轮圈的连接改为将铲斗耳环擂人轮圈侧壁中间再用螺栓紧固的方法(见图 3 )。
这样挖掘时的冲击力造成耳环窜动的力即由轮圈两侧壁承受,防止了螺栓拉毛现象。
( 3 ) 斗体斗体与斗唇固联( 一般采用灯接)。
斗体的形状直接影响物料的装卸。
对斗体的主要要求是: 能减少切割物料时的阻力, 使物料易于流入铲斗并减少对斗壁的正压力, 接近斗口的脊背部分应与切割方向平行,斗体的横向截面积变化应较小, 接近铲斗尾部的斗体脊背曲线的切线应与斗口切线垂直。
3.2斗体曲线本次所设计的WUD —400\700型斗轮挖掘机斗形选用某一大圆中的一段圆弧曲线作为斗体脊背曲线( 见图4 )。
该机在茂名油母页岩露天矿挖掘页岩及砂土混合物料时, 斗体上粘附物料十分严重。
满斗时经压实的物料在斗体上形成了一条十分光滑的曲线N ( 见图5 )。
铲除粘附物后继续挖掘, 发现粘附的物料在铲斗中仍形成同样的一条曲线。
经测量发现是一条类似椭圆曲线。
圆弧和椭圆都是处处可导的光滑曲线, 没有死角拐点。
但是圆弧曲线的曲率不变而椭圆曲线各点都不一样( 图6 )。
椭圆参数方程是:式中 a ——椭圆的长半轴B ——椭圆的短半轴根据参数方程可求得椭圆曲率r K当0<θ<2/π时,θd dK T<0,这表明椭圆在第一象限的曲率T K 是随着θ角增大而单调下降的,因此,当θ=0时,曲率最大,将θ=0代入上式T K 中可知2ba K Tmas =。
为了保证脊背曲线在斗体尾部处的切线与水平线垂直。
我们选取椭圆曲线时, 从它与长轴的交点A 作为起点取弧AM 为所设计的斗体后部曲线( 见图6 )。
在M 点处,OC BC arctg=1θ。
弧AM 曲线上哥哥点曲率T K 的变化范围是:2232222)cos sin (ba Kb a ab T ≤≤+θθ。
斗体所需的椭圆曲线, 是根据铲斗长度和高度及在斗口处所需求的切线与X 轴( 水平轴)的夹角刀来确定( 见图7 )。
设弧AM 为所需斗体脊背曲线,长半轴:OA=a ,短半轴:OB=b ,则AC=L=a —X ,MC=H=y ,则椭圆方程为m tg ya xb b y a x ==-=+β2222221 以x = a 一L , v = H , m = t g β代入上边椭圆方程式得: mL H mL H L a L a mH a b 2)(22++=--=,由此求得a,b ,从而即可确定所需椭圆。
为使斗体横向截面收缩率较小, 在确定脊背曲线后, 还需要再确定斗体的拱形曲线及斗体底面框线。
根据前面的分析, 可以选用半圆弧的拱形曲线及变化缓慢的梯形框线( 见图8 )。
这样就完成了铲斗各部位的设计。
3.3两种曲线的比较( 参见图9 , 10)( 1 ) 分别将两种曲线等分为12 等分, 计算各横截面积和截面收缩率(表1 ) 椭圆方程16145.1893222=+y x ( 2 ) 分别求得圆弧曲线及椭圆曲线曲率表格一、 两种曲线的比较 注:)~2,1(11n i s s s e i i i i =-=++圆弧曲率为:当a=1893.5毫米,b=614毫米时,椭圆曲率变化范围是:0.000380842≤T K ≤0.005022599再利用取虑公式T K 和椭圆参数方程,求得弧AM 上一点N ,使得椭圆在此点的曲率与K 圆相同(见图11)。
由T K 的单调性可知弧MN 的曲率都小于K 圆,仅弧AN 的曲率大于K 圆。
由计算得:AD=146.75毫米四、结论( 1 ) 椭圆曲线斗体的横截面收缩率比画弧斗体横截面收缩率较小, 也就是椭圆横截面积的变化较缓慢, 从而减少挖掘时物料对铲斗壁的挤压力, 有利于铲斗内物料卸净。
( 2 ) 椭圆斗体曲率的变化中, 只有在弧 A N 这段曲线斗体尾部上曲率才大于圆弧曲线的曲率, 而这段曲线在x 轴的投影只占斗长( L )的四分之一左右, 其余四分之三都比圆弧曲线的变化更平稳。
可以满足铲斗在卸料时快而净的要求。
椭圆的离心率2)(1ab e T -=,以a=1893.5,b=614代入上式T e =0.9459 此离心率很接近抛物线的离心率(e 抛=1)若以斗体底部为坐标原点,则可得抛物线为方程(图12)px y 22=,以x=609,y=450(见图10)得512.332609450222===X y P ,则P=166.256 而抛物线的焦点(F )坐标为(p/2,0)即为(83.128,0)抛物线的曲率为:23)2(p x PK +=, 25)2(3p x p dX dK +-=<0(x ≥0)。
当P=166.256,0≤x ≤609时,得0.002503≤K 抛≤0.0060148,所以同样能在抛物线上找到一点N ’使得Kn ’抛=K 圆=1/680,同时求得弧ON ’在X 轴上的投影X=OC=129.5<146.75(椭圆线上弧AN 在X 轴上的投影)从K 抛关于X 的单调性可知, 在弧O N`上K 抛> K 圆, 在弧N ’M 上K 抛< K 圆, 且抛物线在M 点的曲率小于椭圆在M 点的曲率( 0.0002503<0.000380842 ) 及N ’点到斗口的水平距离也比N 点( 图11 ) 到斗口的水平距离大, 这就表明抛物线在斗体前半部比椭圆前半部更为平坦, 后半部比椭圆后半部变化剧烈。